1. Introduction
With increasingly severe environmental pollution and the depletion of fossil energy, electric vehicles have become the main development direction of transforming and upgrading the vehicle industry [
1,
2,
3,
4]. The extended-range electric vehicle adds a range extender basis to the pure electric vehicle, which allows the engine in the range extender to drive the generator to provide power for the power battery and the drive motor when the power battery level is too low. This method effectively improves the vehicle’s driving range [
5]. The starter generator for the range extender has two functions: starting the engine and generating electric energy. It is one of the key components of the extended-range electric vehicle. Its output performance has an important influence on the power and safety of the vehicle [
6,
7,
8]. Therefore, it has received extensive attention from experts and scholars. The hybrid excitation starter generator (HESG) uses the permanent magnet (PM) and the electric excitation coil to generate the magnetic field. Compared with the pure PM starter generator, its main magnetic field can be adjusted, and the voltage regulation performance is good. Compared with the pure electric excitation starter generator, it reduces the excitation power and has the advantages of less excitation loss and high efficiency [
9,
10,
11,
12]. It has become an important development direction of the starter generator for electric vehicle range extenders.
When the HESG runs under the load condition, the armature winding will induce the armature reaction magnetic field (ARMF). This magnetic field will form a magnetic circuit through the stator core, the main air gap, and the rotor core, which will affect the size and distribution of the main magnetic field. That effect is usually analyzed by the ratio of the difference between the output voltage of the load condition and the output voltage of the no-load condition to the rated load voltage, that is, the voltage regulation rate [
13,
14]. Refs. [
15,
16] established a mathematical model of the voltage regulation rate of the built-in PM starter generator under pure resistance load conditions. The results showed that the voltage will increase with the load when the starter generator has an anti-convex polarity. On this basis, Refs. [
17,
18,
19] used the field-circuit combination method to analyze and verify that the anti-convex polarity of the rotor will produce a voltage self-compensation effect when the pure resistance load is applied. According to this characteristic, the voltage regulation rate can be reduced. In Ref. [
20], the calculation models of electromagnetic characteristic parameters, such as the self-inductance and mutual inductance of armature winding under the condition of armature winding open circuit and armature reaction, were established. Based on this, the subdomain method was used to study the magnetic density model of the main magnetic field and ARMF of a radially magnetized PM structure, and the finite element method was used to verify it. Ref. [
21] studied the influence of the armature reaction on the output performance of PM starter generators with different rotor structures. The influence of different pole numbers and slot numbers on the output performance of the starter generator was analyzed using the finite element method. Ref. [
22] used the field-circuit combination method to study the calculation model of the voltage regulation rate of the PM starter generator. The effects of air gap length, stator slot shape, and stator core length on the voltage regulation rate were quantitatively analyzed, and the optimal parameters were selected to reduce the impact of armature reaction on the main magnetic field. Further, the model was verified by the finite element method. Ref. [
23] established a calculation model of the external characteristics of the hybrid excitation PM starter generator. Based on this analysis, it was obtained that adjusting the power factor, reducing the armature winding resistance, and the armature reaction direct-axis reactance can reduce the voltage regulation rate of the starter generator. Ref. [
24] established the expression of the voltage regulation rate of the built-in PM starter generator and studied the influence of structural parameters on the voltage regulation rate. Ref. [
25] deduced the mathematical model of the voltage regulation rate of the radially magnetized PM starter generator and revealed the influence of the rotor core length, the size of the magnetic air gap, the coercivity of the PM, and the main air gap length on the voltage regulation rate. The equivalent magnetic circuit model of single-phase HESG was established in [
26]. The main parameters of the motor were calculated using the analytical method, and the influence of the main structural parameters on the voltage regulation rate was revealed.
As indicated by above research status, most scholars have established the mathematical model of ARMF and voltage regulation rate using the field-circuit combination method to analyze the influence of the main structural parameters on the voltage regulation rate. However, the field-circuit combination method mostly involves the magnetic circuit structure, and the description accuracy of armature reaction factors is relatively low. In this paper, the graphical method is used to derive the analytical model of the voltage regulation rate, and the armature reaction reactance and impedance are solved to obtain a detailed analytical formula of the voltage regulation rate. Based on the solution method of armature reaction reactance, the influence of the main influencing parameters on the armature reaction and voltage regulation rate is studied.
2. Analysis of Armature Reaction of HESG
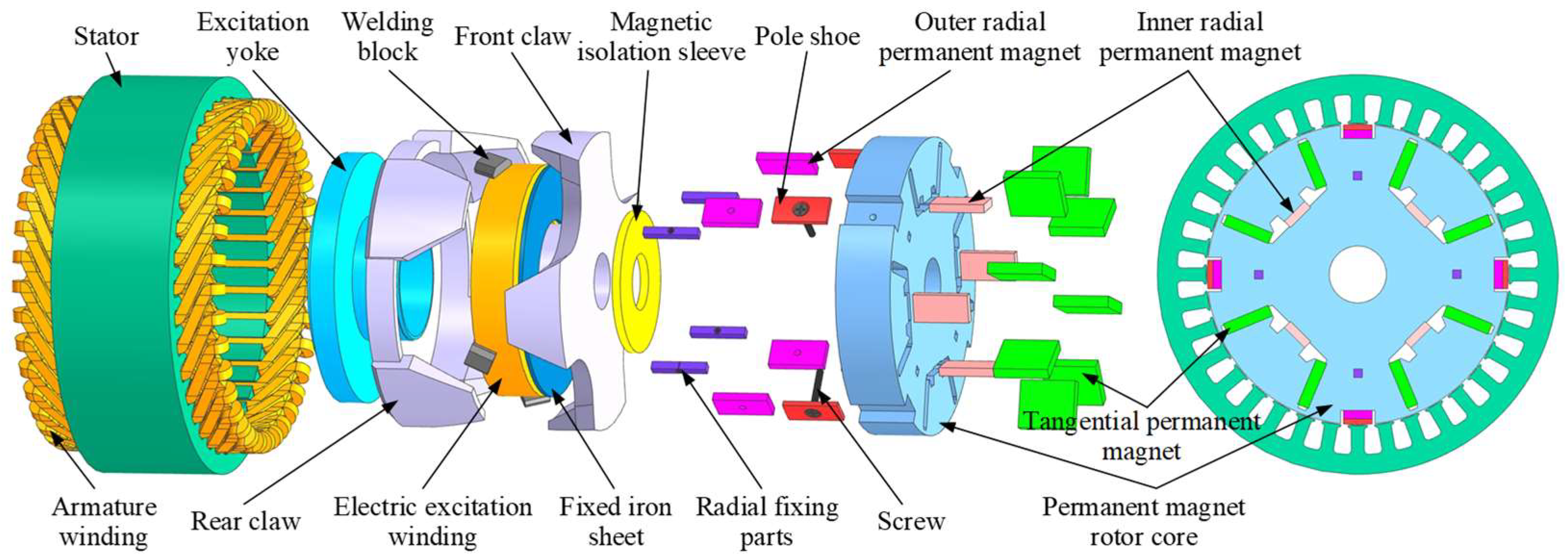
In this paper, a combined-pole PM and brushless electromagnetic HESG is proposed. The structure is shown in
Figure 1. The starter generator adopts a parallel structure with a coaxial PM rotor and an electric excitation rotor. The PM magnetic field and electric excitation magnetic field do not interfere with each other in the rotor part and are synthesized in the main air gap. The structure can flexibly design the power of the PM part and electric excitation part to achieve a reasonable state of regulation characteristics and output efficiency.
Figure 1 shows that the electric excitation rotor of the designed HESG adopts a brushless claw-pole structure, which eliminates the carbon-brush slip ring and effectively improves the reliability of the whole machine. The PM rotor adopts a combined-pole structure, with outer and inner combined PMs designed in the middle of the uniformly distributed tangential PM. The main rotor magnetic field is mainly provided by the tangential PM, and the combined PMs at the center of the magnetic pole are used to improve the magnetic field strength. The combined PM outside the center of the magnetic pole is designed as a surface-mounted PM structure with a pole shoe, and the surface-mounted PM is fixed with screws and rivets. The structure can effectively reduce the demagnetization problem of PM caused by ARMF. At the same time, the magnetic field of each pole of the rotor is provided by a combination of multiple PMs, and the rotor magnetic field will have high magnetic field strength and uniform magnetic field distribution.
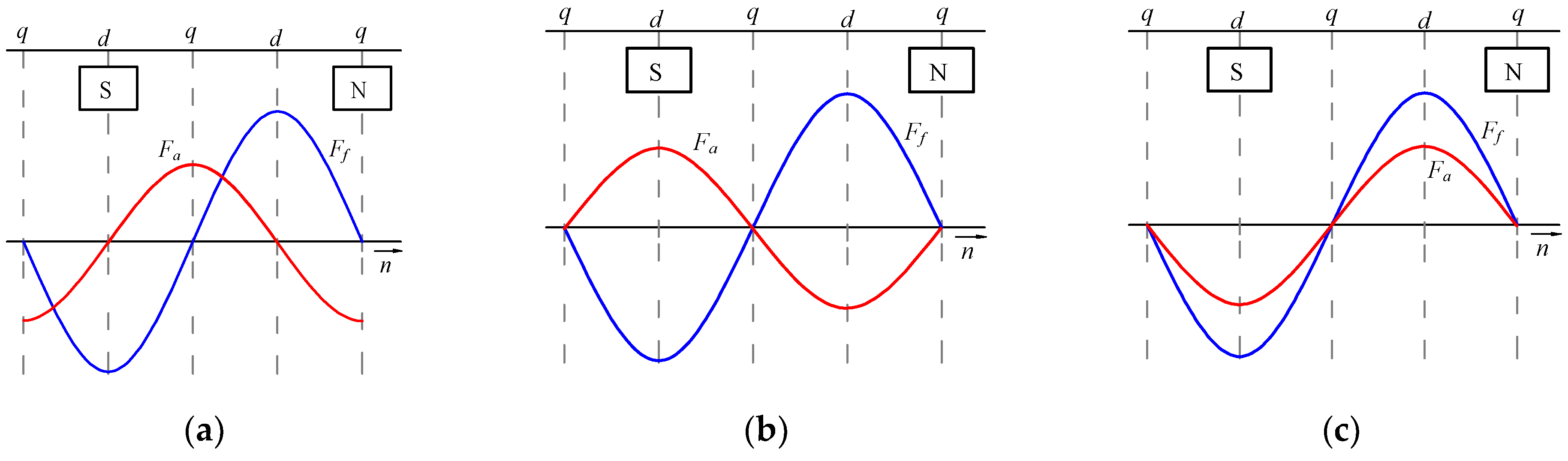
The magnitude of the ARMF of the starter generator is mainly related to the armature winding and armature current. For the power generation state, the armature current is related to the output power and load of the power generation state. The influence of ARMF on the main air gap magnetic field is related to the nature of the load [
27,
28,
29]. When the internal power factor angle is 0°, the load current is in phase with the no-load induced electromotive force, and the load is a pure resistive load. The armature reaction electromotive force differs by 90° phase from the rotor electromotive force, showing an orthogonal relationship. At this time, the armature reaction is named the quadrature-axis armature reaction. When the internal power factor angle is 90°, and the load is a purely inductive load, the phase of the armature reaction magnetomotive force is the same as that of the rotor magnetomotive force, but the direction is opposite. When the internal power factor angle is −90° and the load is a pure capacitive load, the armature reaction magnetomotive force and rotor magnetomotive force have the same phase and direction. The armature reaction under the above two working conditions with an internal power angle of ±90° is named the direct-axis armature reaction. The relationship between the armature reaction magnetomotive force and the rotor magnetomotive force under the three different load properties mentioned above is shown in
Figure 2.
From
Figure 2a, it can be seen that the quadrature-axis ARMF plays a demagnetization role in the first half of the rotor magnetomotive force waveform, which weakens the rotor magnetomotive force, and plays a magnetization role in the second half of the rotor magnetomotive force waveform, which enhances the rotor magnetomotive force. Therefore, the quadrature-axis ARMF not only affects the magnitude of the rotor magnetomotive force but also affects its waveform. It can be seen from
Figure 2b,c that the direct-axis ARMF only affects the size of the rotor magnetomotive force, which plays a role in magnetization or demagnetization. Overall, the ARMF can affect the main magnetic field’s size and distribution, reduce the output voltage under the load conditions, and affect the output performance of the whole machine.
For the HESG, the calculation of the voltage regulation rate does not consider the influence of the electric excitation magnetomotive force, and only the PM magnetomotive force is calculated. Therefore, the PM part is considered in the analysis, and the voltage regulation rate is calculated as [
30,
31,
32]:
where
is the output voltage of the no-load condition,
is the output voltage under rated load conditions, and
is the rated voltage.
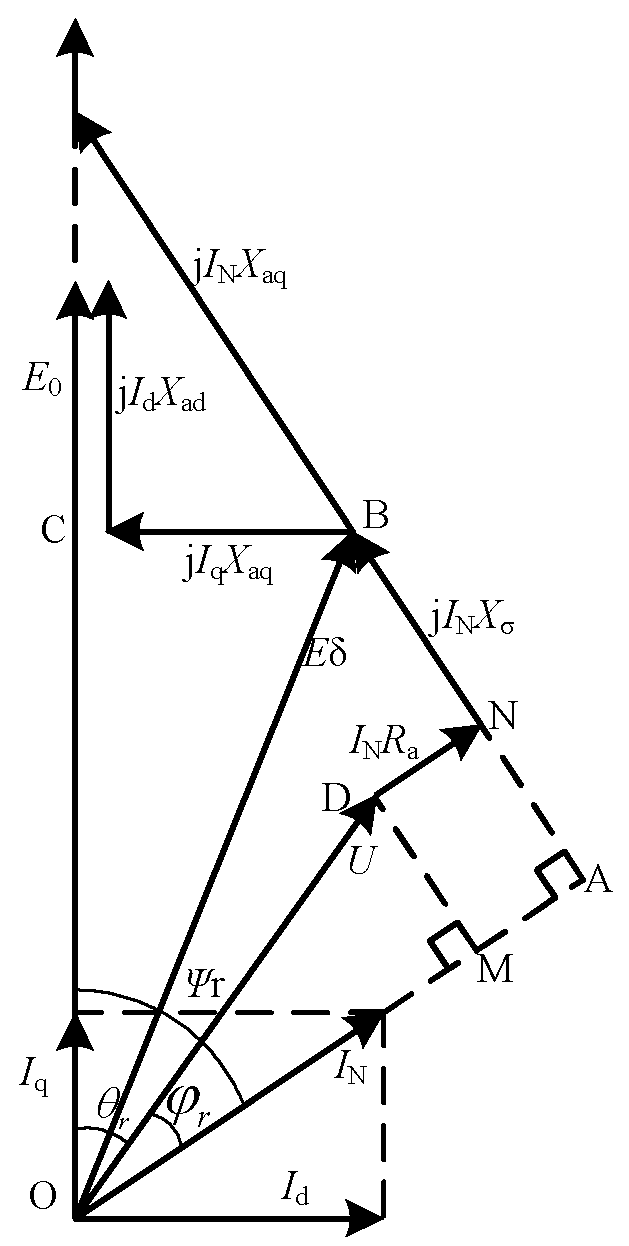
The voltage regulation rate can be calculated by the starter generator’s vector diagram, and the vector diagram of the starter generator under the condition of the resistive inductive load is shown in
Figure 3.
In
Figure 3,
is the power angle,
is the power factor angle,
is the internal power factor angle,
is the magnetomotive force of main magnetic field,
is the direct-axis armature reaction reactance,
is the quadrature-axis armature reaction reactance,
is the stator leakage reactance,
is the rated current of armature winding,
is the current of direct-axis armature reaction, and
,
is the current of quadrature-axis armature reaction;
.
As shown in the vector relationship in
Figure 3, the left and right sides of the main magnetic field magnetomotive force are two right-angle triangles, respectively. One right-angle triangle is made by the main magnetic field magnetomotive force in the direction of the output current, which is composed of O point, A point, and B point. The other right-angle triangle is made by the main magnetic field magnetomotive force in the direction of no-load induced electromotive force, which is composed of O point, B point, and C point.
For the right-angle triangle OBC, according to the Pythagorean theorem, there are:
For the right-angle triangle OAB, according to the Pythagorean theorem, it can be obtained that:
Combining Equations (2) and (3), and decomposing the quadrature-axis and direct-axis armature currents, the solution equation of the output voltage can be obtained as follows:
The analytical expression of the output voltage can be obtained by simplifying and sorting the formula as follows:
The output voltage under no-load condition in the formula is calculated as the induced electromotive force of the starter generator under no-load condition, which is calculated as:
where
is the effective magnetic flux in the main air gap under the no-load condition,
is the winding coefficient of the armature winding, and
, where
is the distribution coefficient of the armature winding,
is the short distance coefficient of the armature winding,
is the skew slot coefficient of the stator, and
is the waveform coefficient of air gap magnetic flux;
, where
is the calculated pole arc coefficient; and
, where
is the stator pitch and
is the pole arc coefficient. For the designed combined-pole PM rotor structure, the pole arc coefficient is calculated as the ratio of the arc length between the leakage magnetic areas of the adjacent built-in tangential PM outer end to the pole distance.
For the built-in PM rotor, due to the presence of a magnetic air gap or a rotor core on the outer side of the PM, its outer magnetic flux density is large, and the outer part is equivalent to the pole shoe effect. Therefore, the direct-axis and quadrature-axis armature reaction reactance can be calculated as follows [
33]:
where
is the quadrature-axis armature reaction magnetomotive force and
is the magnetomotive force in the main air gap;
, where
is the magnetic flux density in the main air gap,
is the main air gap coefficient, and
is the effective magnetic flux in the main air gap under rated load conditions.
The stator leakage reactance
is calculated as follows:
where
is the number of slots per pole and per phase, and
is the stator specific leakage permeance;
,where
is the stator slot specific leakage permeance,
is the stator end specific leakage permeance,
is the specific leakage permeance of the opening stator slot, and
is the specific leakage permeance of the tooth tip.
The specific leakage permeance of each part of the stator is related to the stator slot type and armature winding parameters. For the semi-open rectangular slot, the size parameters are shown in
Figure 4.
Based on
Figure 4, the specific leakage permeance of each part of the stator is calculated as follows:
where
,
,
,
,
, and
are the heights of the relevant positions of the stator slot and armature winding distribution, as shown in
Figure 4,
and
are the width of the stator slot wedge and slot top, and
is the central arc length of the stator slot;
, where
is the inner diameter of the stator,
is the number of stator slots, and
is the armature winding pitch ratio; and
, where
is the armature winding pitch,
is the length of the armature winding end, and
is the stator pole distance.
The voltage regulation rate of the HESG can be obtained:
According to (8), the voltage regulation rate is mainly related to the ARMF, no-load main magnetic field, load working condition parameters, and magnetic conductivity parameters of the stator and rotor. In addition, reducing the voltage regulation rate should reduce the ARMF and make the output voltage reach the maximum value on the basis of ensuring the no-load induced electromotive force. When the power factor of the starter generator is determined, increasing the quadrature-axis armature reaction reactance, reducing the direct-axis armature reaction reactance, and reducing the armature winding resistance and stator leakage reactance can reduce the voltage regulation rate. Among them, the reactance of the quadrature-axis and direct-axis armature reactions is related to the rotor structure. For pure radial magnetized PM rotors, the PM is located at the center of the rotor’s direct-axis. Due to the high magnetic resistance of the PM itself, the influence of the quadrature-axis ARMF on the main air gap is relatively small. For a pure tangential magnetized PM structure, the PM is located at the center of the rotor’s quadrature-axis, and the quadrature-axis ARMF is distributed on both sides of the PM. Therefore, the armature reaction reactance of the tangential PM structure is larger, and the influence on the main air gap is also larger.
For the combined-pole PM rotor in this paper, the rotor is equipped with radial PM and tangential PM. The direct-axis ARMF mostly forms a magnetic circuit through the front and rear ends of the tangential PM, while the quadrature-axis ARMF forms a magnetic circuit near the combined PM at the center of the rotor magnetic pole. For the convenience of analysis, the ARMF is equivalent to the quadrature-axis and direct-axis ARMF, the armature reaction magnetomotive force is equivalent to the quadrature-axis and direct-axis armature reaction magnetomotive force, and the three-phase armature reaction current is equivalent to the quadrature-axis and direct-axis armature reaction current too. When the initial phase angle of the starter generator is zero, the three-phase current of the armature reaction can be calculated as follows:
where
is the phase current amplitude, and
is the running time of the starter generator.
When the running time of the starter generator is zero, the relationship between the three-phase currents is:
By Park transformation of the three-phase current, the quadrature-axis and direct-axis currents can be obtained as follows:
where
is the angle between the axis of phase A armature winding and the axis of the direct-axis, and
is the set current for balancing the three-phase current system.
The direct-axis and quadrature-axis armature reaction reactance of the starter generator can be calculated based on different working states. Among them, the direct-axis armature reaction reactance can be calculated based on the equivalent direct-axis state. In this state,
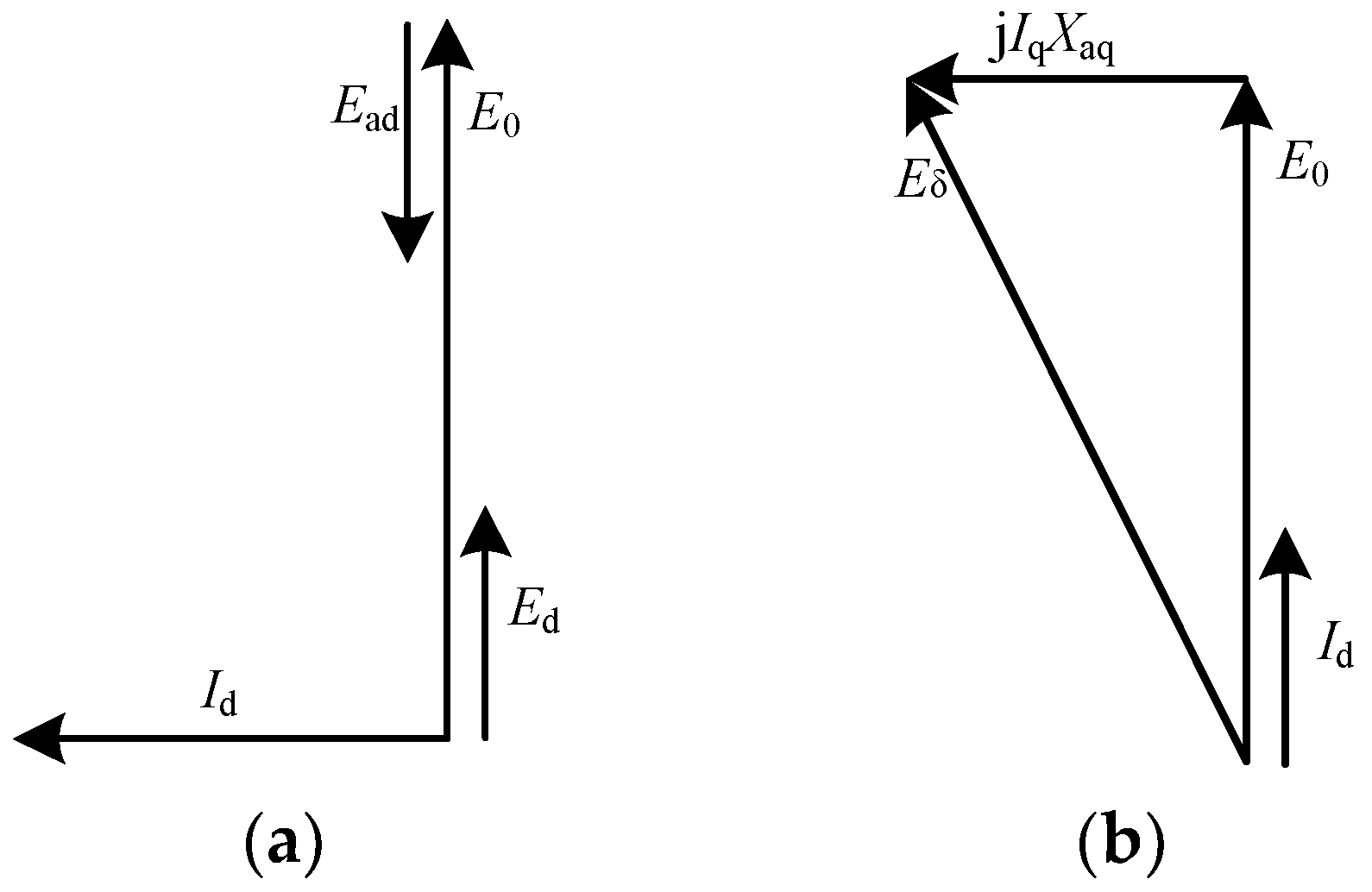
is set to zero. That is, the direct-axis of the rotor coincides with the axis of the A-phase armature winding. At this time, the armature winding current only has a direct-axis component, and there is no quadrature-axis component. The magnetic field distribution of the armature winding is the magnetic field distribution of the direct-axis armature winding, and the calculated reactance is the direct-axis armature reaction reactance. The quadrature-axis armature reaction reactance is calculated based on the equivalent cross-axis state, which sets the angle between phase A’s armature winding axis and the direct-axis to be 90°. At this time, the armature winding current only has the quadrature-axis component. The magnetic field of the armature winding in this state is the quadrature-axis ARMF, and the reactance parameter at this time is the quadrature-axis armature reaction reactance. The vector diagram of the equivalent direct-axis and the equivalent quadrature-axis states is shown in
Figure 5.
It can be seen from
Figure 5 that the induced electromotive force of the direct-axis armature reaction can be calculated as a scalar difference because the direct-axis armature reaction magnetic field only has the effect of increasing and weakening the main magnetic field. In contrast, the quadrature-axis armature reaction magnetic field not only affects the size of the main magnetic field but also affects its distribution. Therefore, the induced electromotive force of the quadrature-axis armature reaction must be calculated as a vector. The direct-axis and quadrature-axis armature reaction reactances are as follows:
where
is the direct-axis electromotive force, which is calculated as the electromotive force of the equivalent direct-axis state;
, where
is the fundamental magnetic flux per pole of the equivalent direct-axis state; and
, where
is the rotor pole distance,
is the fundamental amplitude of the air gap magnetic flux density in the equivalent direct-axis state,
is the no-load induced electromotive force vector in the equivalent quadrature-axis state,
is the quadrature-axis armature reaction electromotive force vector in the equivalent quadrature-axis state, and
is the quadrature-axis armature reaction current vector.
In the calculation of direct-axis and quadrature-axis armature reaction reactance, since the direct-axis ARMF has only the effect of increasing and weakening the main magnetic field, the induced electromotive force can be calculated as the scalar difference when calculating the direct-axis armature reaction reactance, whereas the quadrature-axis ARMF not only affects the size of the main magnetic field but also affects its distribution. The induced electromotive force must be vector addition during the calculation of the quadrature-axis armature reaction reactance.
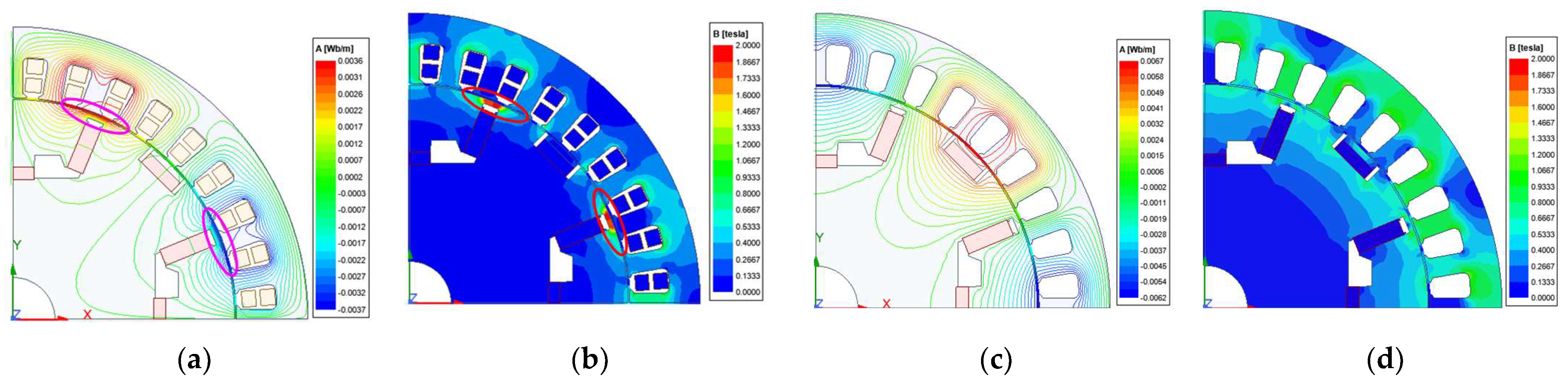
The finite element analysis model of the PM magnetic field is established, and the PM is set as the zero excitation source. Through simulation analysis, the magnetic field line distribution diagram and magnetic density cloud diagram of the equivalent direct-axis and quadrature-axis ARMF are obtained, as shown in
Figure 6.
Figure 6 shows that the direct-axis ARMF mainly forms a magnetic circuit at the outer end of the tangential PM, and a small part passes through the tangential PM, the combined PM inside the magnetic pole center, and the magnetic gap between the two PMs. Because this magnetic gap is set to a trapezoidal magnetic gap with a large area, the direct-axis ARMF in the air gap is less. In contrast, the quadrature-axis ARMF mainly forms a magnetic circuit on both sides of the tangential PM without passing through the PM. The magnetic field reluctance is small. Since the direction of the quadrature-axis ARMF is perpendicular to the magnetization direction of the combined PM, the quadrature-axis ARMF has a great influence on the direction of the outer magnetic field of the combined PM and the direction of the magnetic field in the main air gap. According to the magnetic flux density cloud diagram, the ARMF is mainly distributed near the outer circle of the rotor, and the direct-axis ARMF is saturated in the core magnetic circuit at the outer end of the tangential PM. However, the overall magnetic field strength of the quadrature-axis armature reaction is greater than that of the direct-axis ARMF strength. It can be concluded that the direct-axis ARMF has a great influence on the PM, while the quadrature-axis ARMF has a great influence on the direction of the magnetic field in the main air gap.
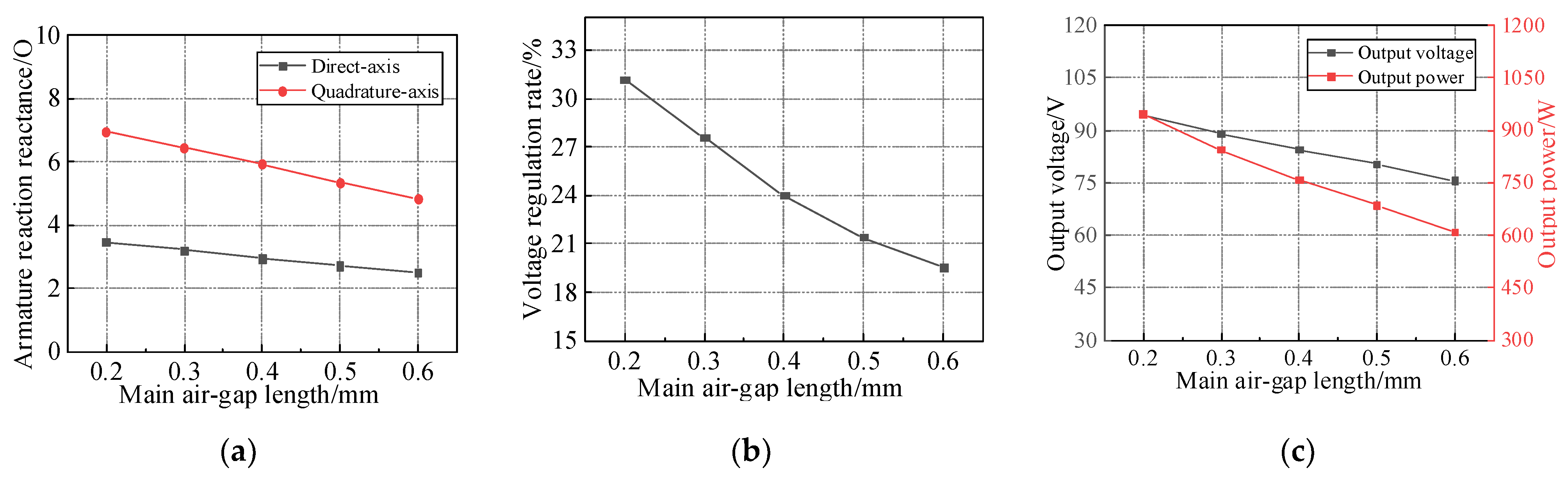
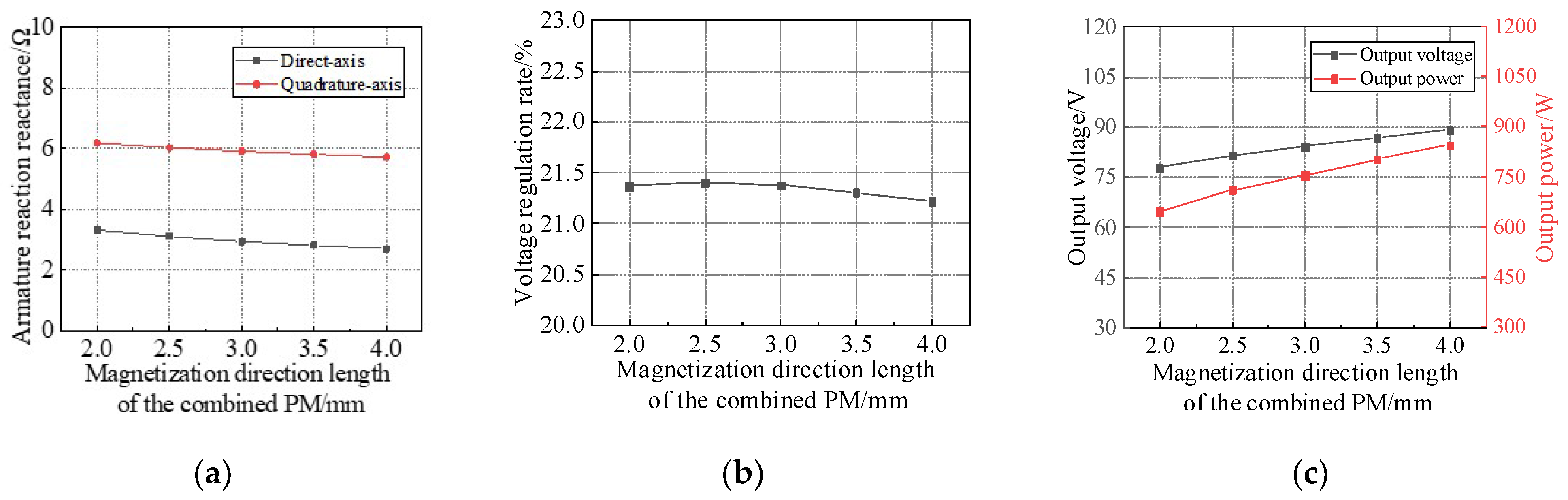
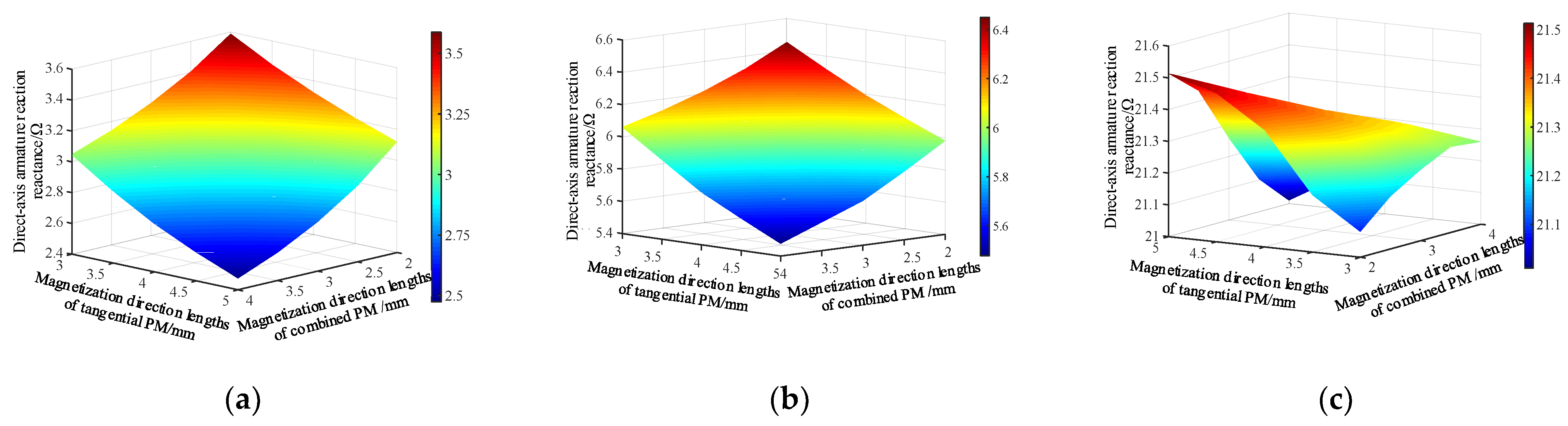
According to the analysis of the direct-axis and quadrature-axis ARMF, the main influencing factors of the direct-axis ARMF are the radial distance of the outer end of the tangential PM with smaller reluctance and the magnetization direction length of the tangential PM and the inner combined PM. The longer the radial distance of the outer end of the tangential PM, the smaller the magnetization direction length of the two PMs, the smaller the reluctance of the magnetic circuit of the direct-axis ARMF, and the larger the direct-axis armature reaction magnetic flux. The quadrature-axis ARMF mainly forms a magnetic circuit through the rotor core, and the rotor structure has little effect. Because it is mainly distributed on the outer circle of the rotor, the larger the distance between the outer end of the outer combined PM is, the smaller the influence of the quadrature-axis ARMF is. The larger the outer end distance of the tangential PM, the smaller the influence of the direct-axis ARMF on it. Meanwhile, the direct-axis and quadrature-axis ARMFs all pass through the main air gap and mainly act on the main air gap magnetic field. Increasing the main air gap reluctance can effectively increase the armature reaction magnetic circuit reluctance, thereby reducing the ARMF.


 ,
, 







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}