
Research on the Trajectory Tracking of Adaptive Second-Order Sliding Mode Control Based on Super-Twisting

 ,
,  ,
,
Abstract
:1. Introduction
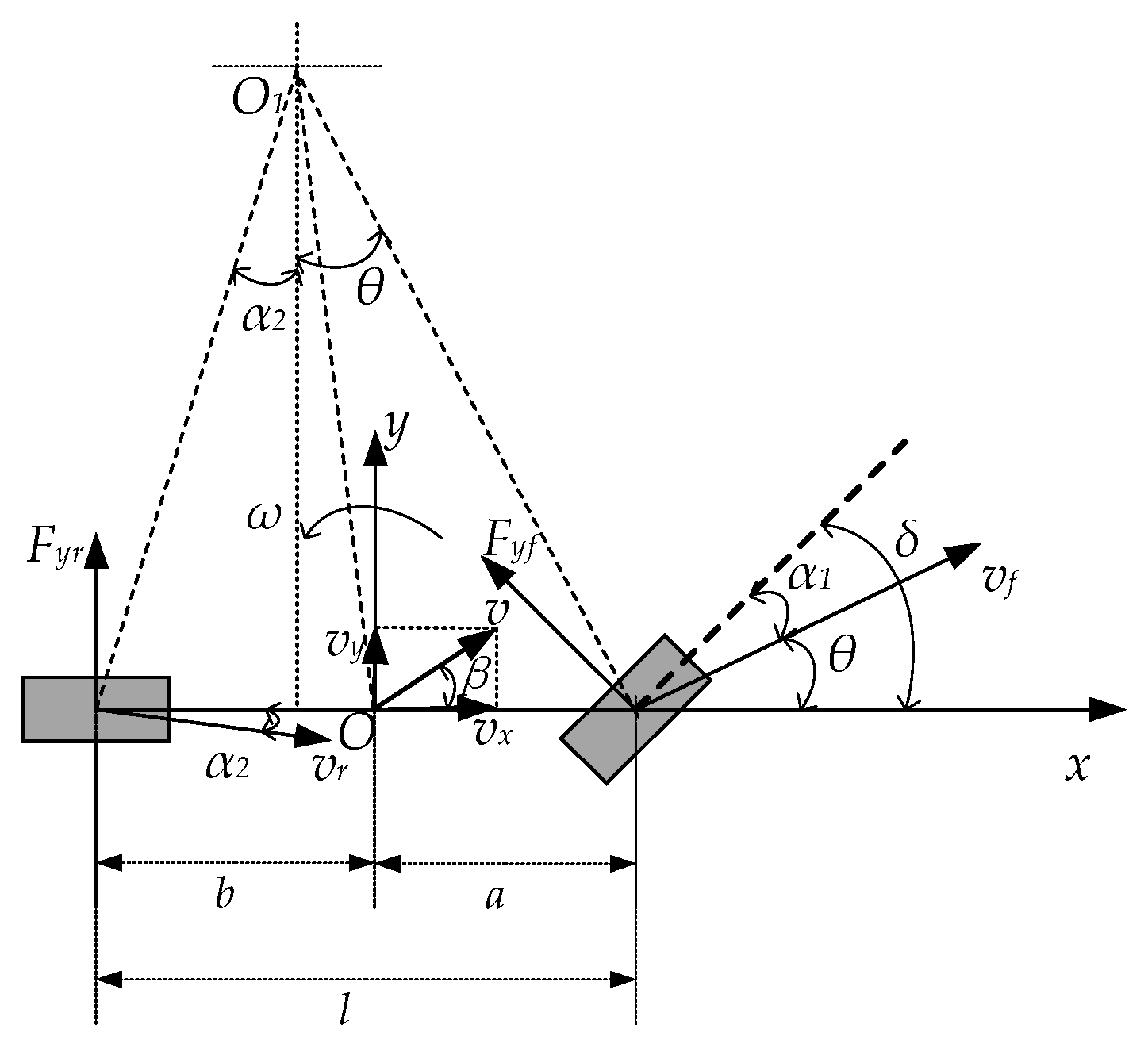
2. Construction of the Vehicle Dynamics Model
3. Adaptive Preview Model
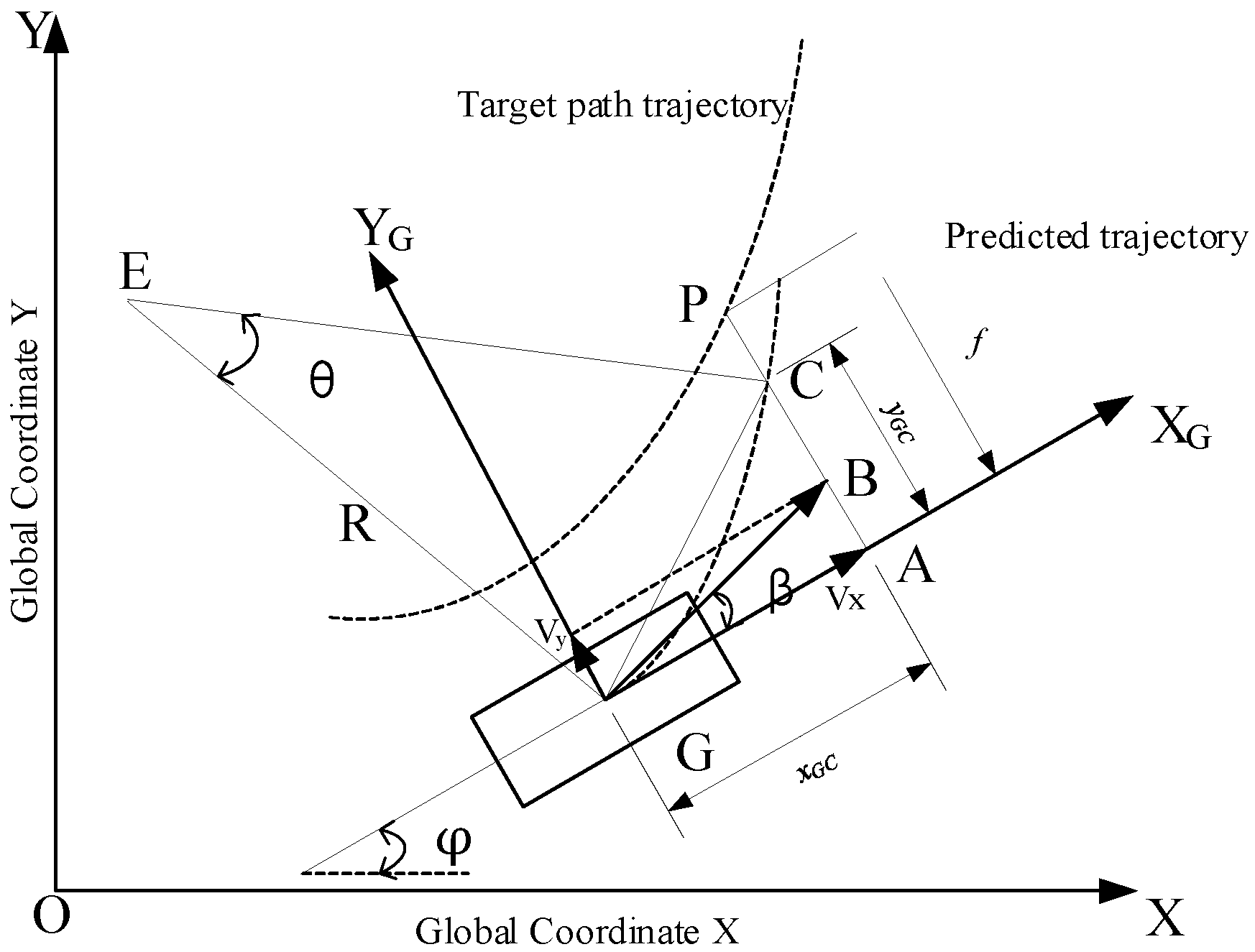
3.1. Optimum Curvature Single Point Preview
3.2. Adaptive Preview Time
4. Design of a Second Order Sliding Mode Controller
4.1. Design of Low-Pass Filters
4.2. Design of the Super-Twisting Controller
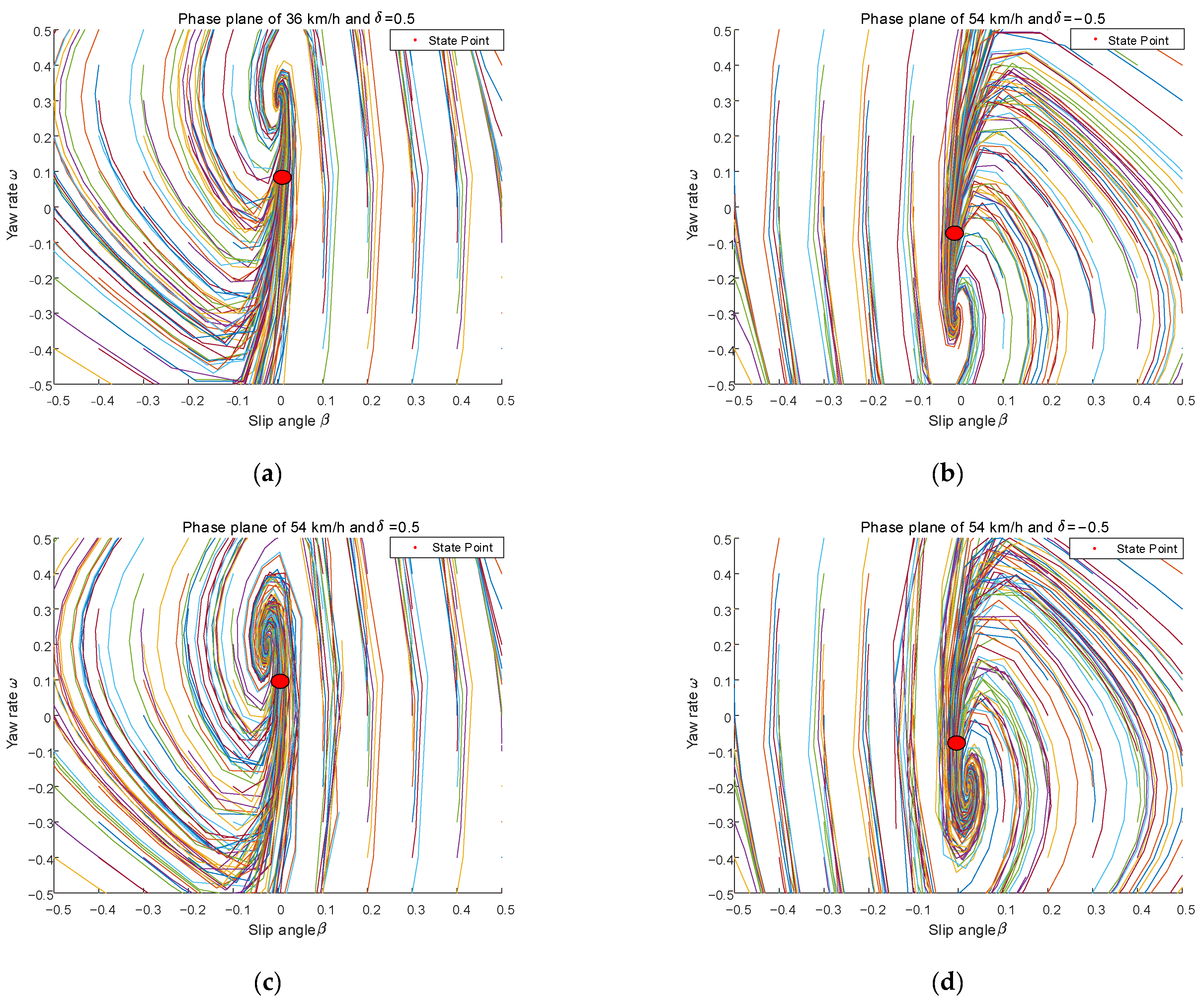
4.3. Phase Diagram Analysis of the Vehicle Dynamic Stability
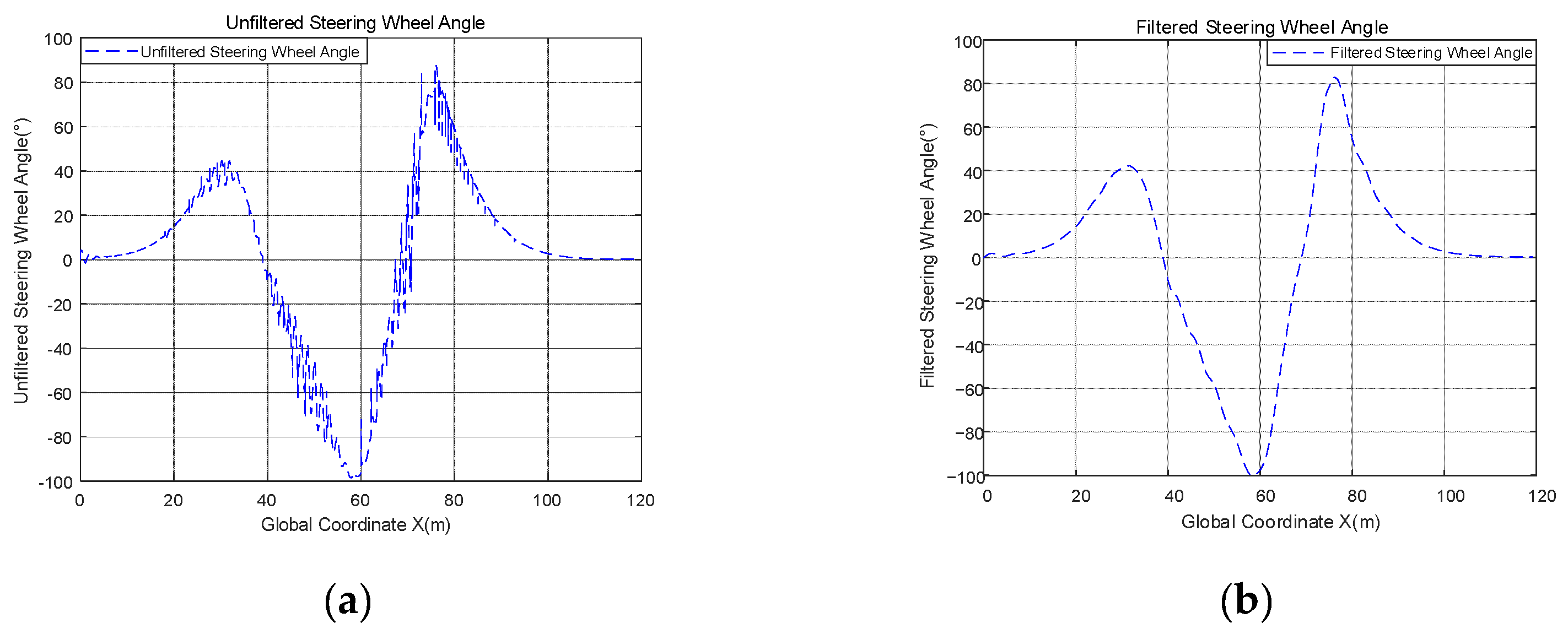
4.4. Low-Pass Filter Validation
5. Design of the MPC Controller
5.1. MPC Output Function Derivation
5.2. MPC Algorithm Objective Function Design
5.3. MPC Algorithm Constraint Design
5.4. MPC Simulation Verification
6. Design of the Conventional Sliding Mode Control (CSMC) Controller
7. Control System Simulation Verification
7.1. Construction of a Joint Simulation Platform
7.2. ST Controller Simulation without Considering the Uncertainty of the Parameters
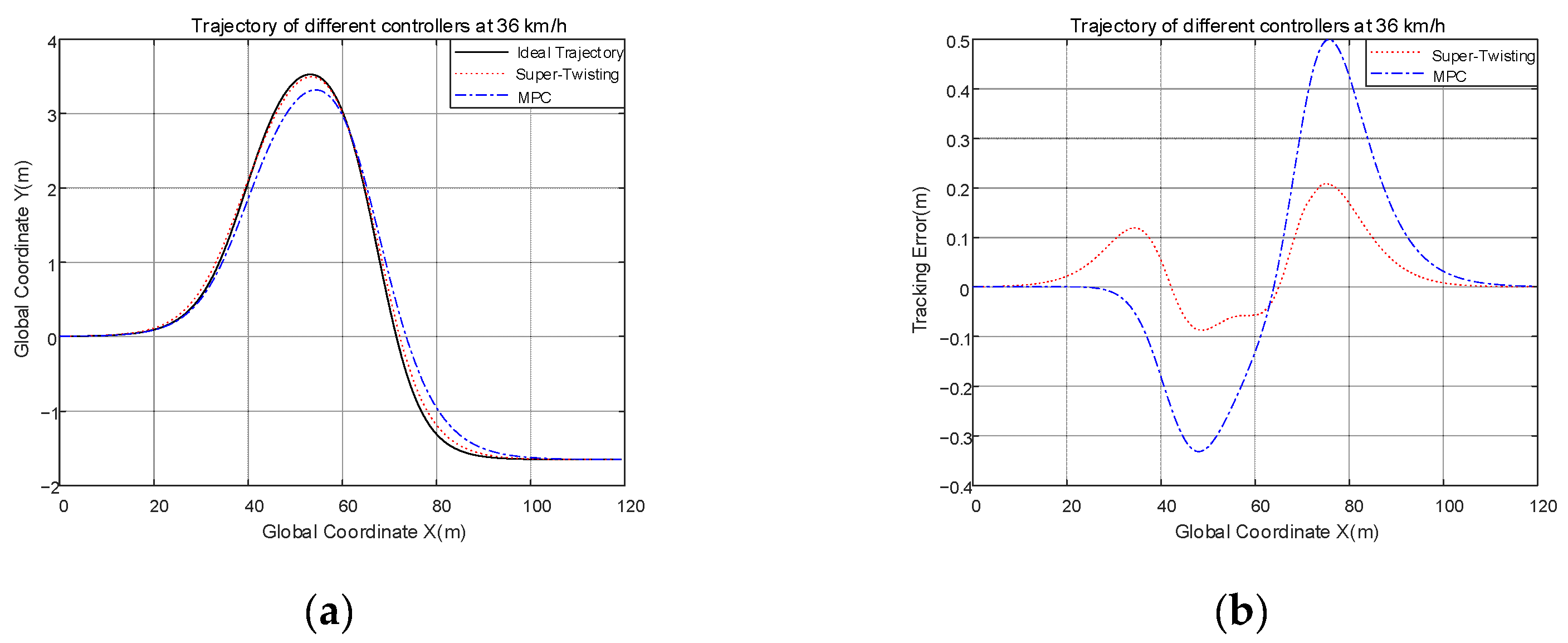
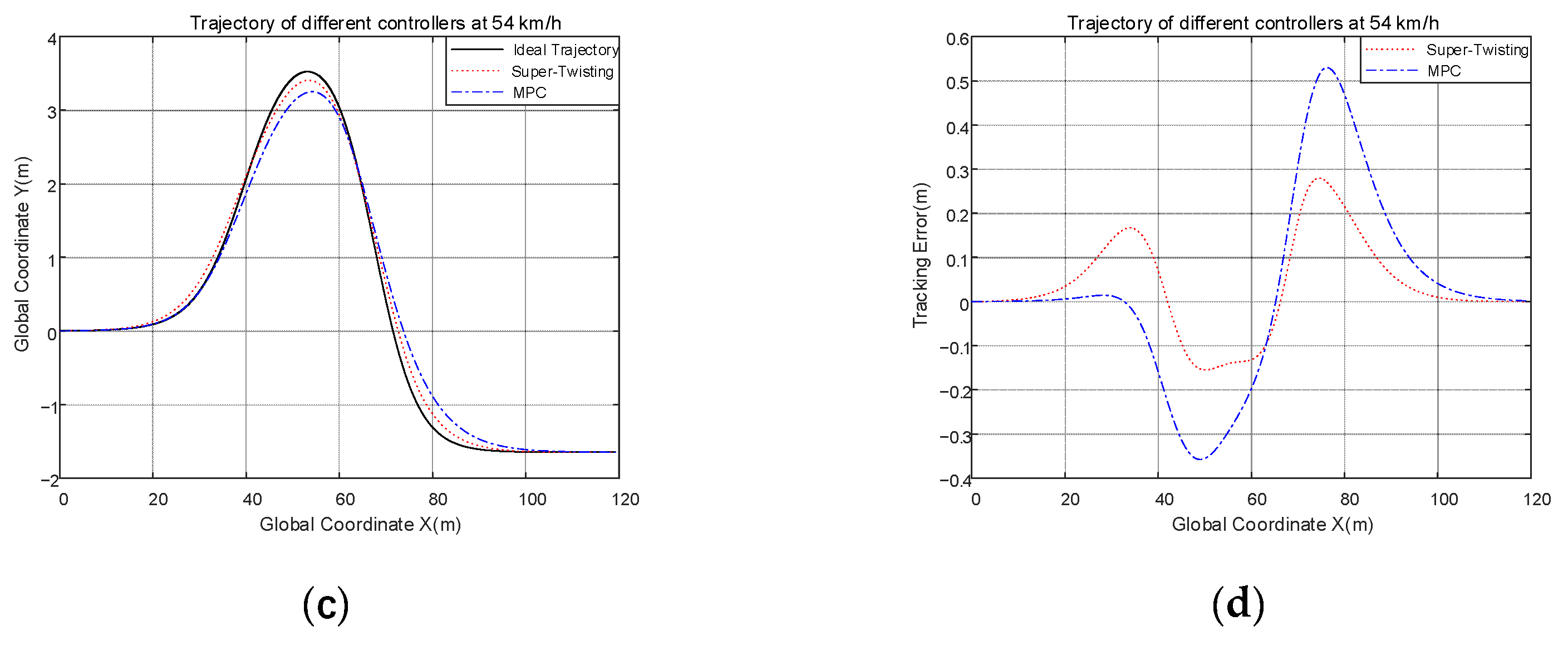
7.3. Comparison Tests of ST Controller and MPC Controller
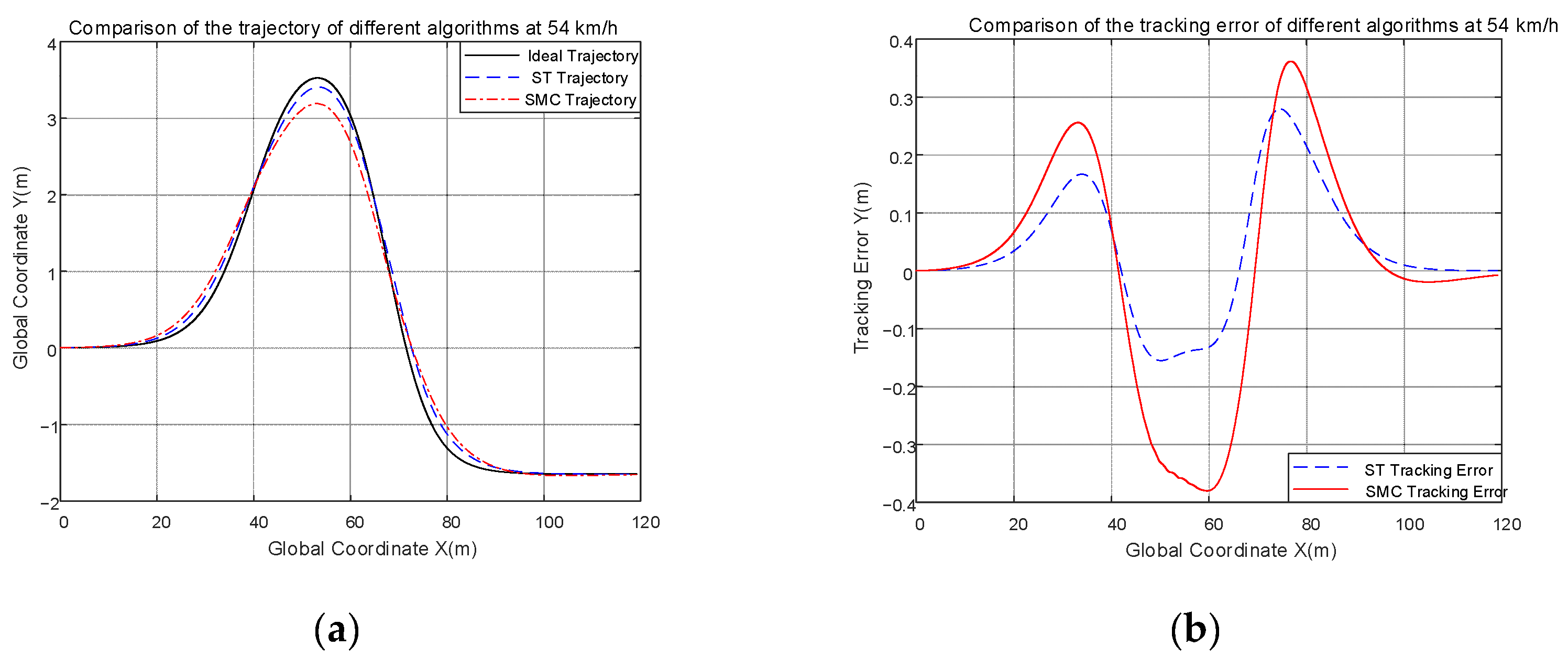
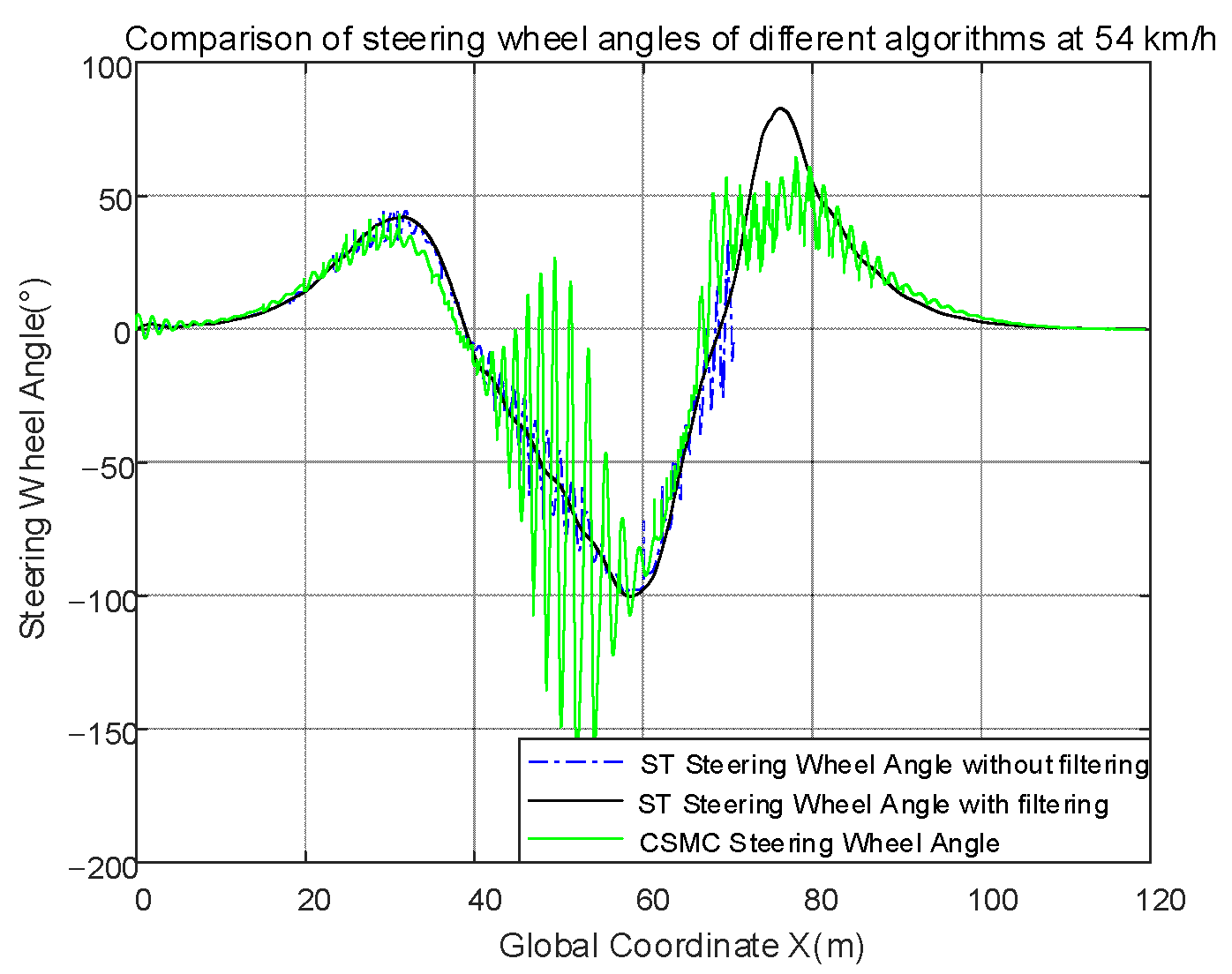
7.4. Comparison Tests of ST Controller and CSMC Controller
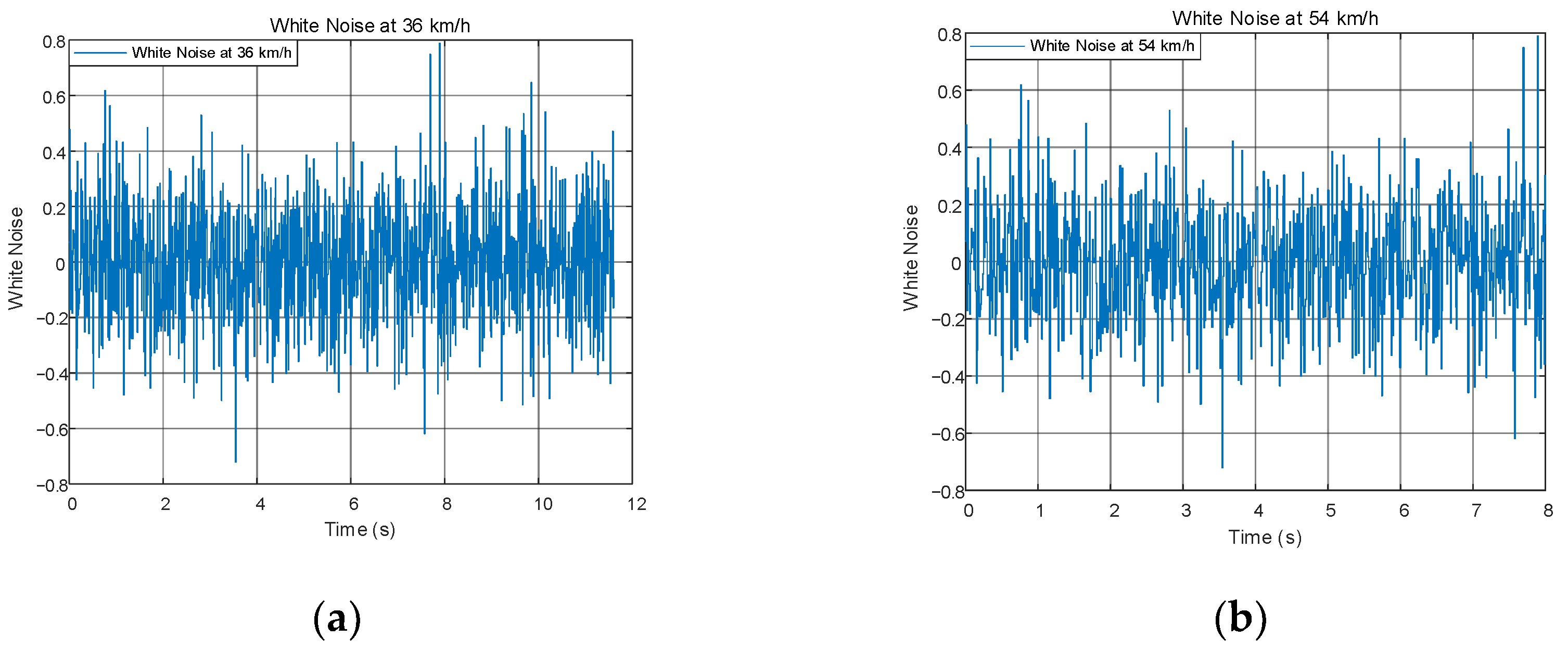
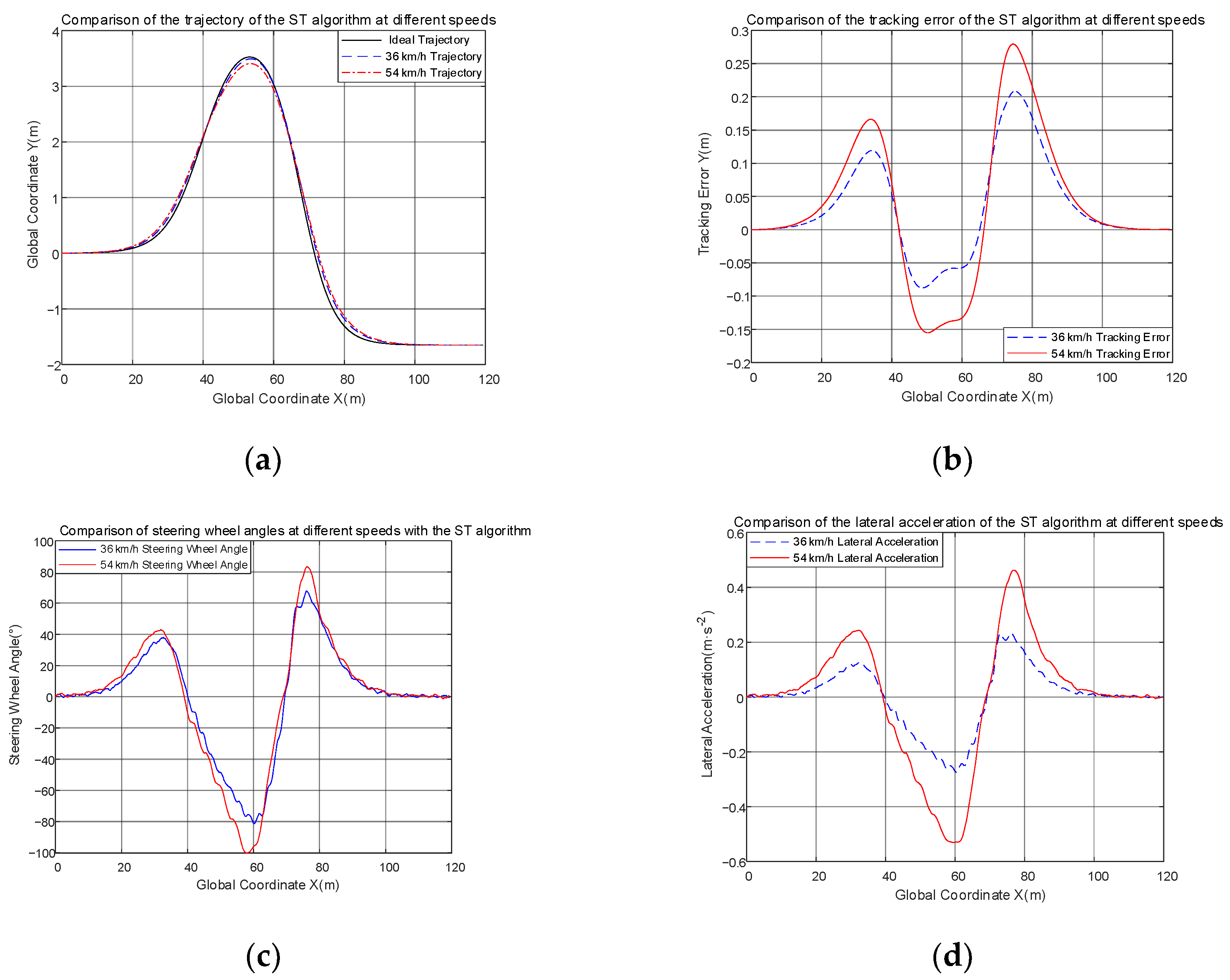
7.5. Simulation with Considering the Uncertainty of the Parameters
8. Conclusions
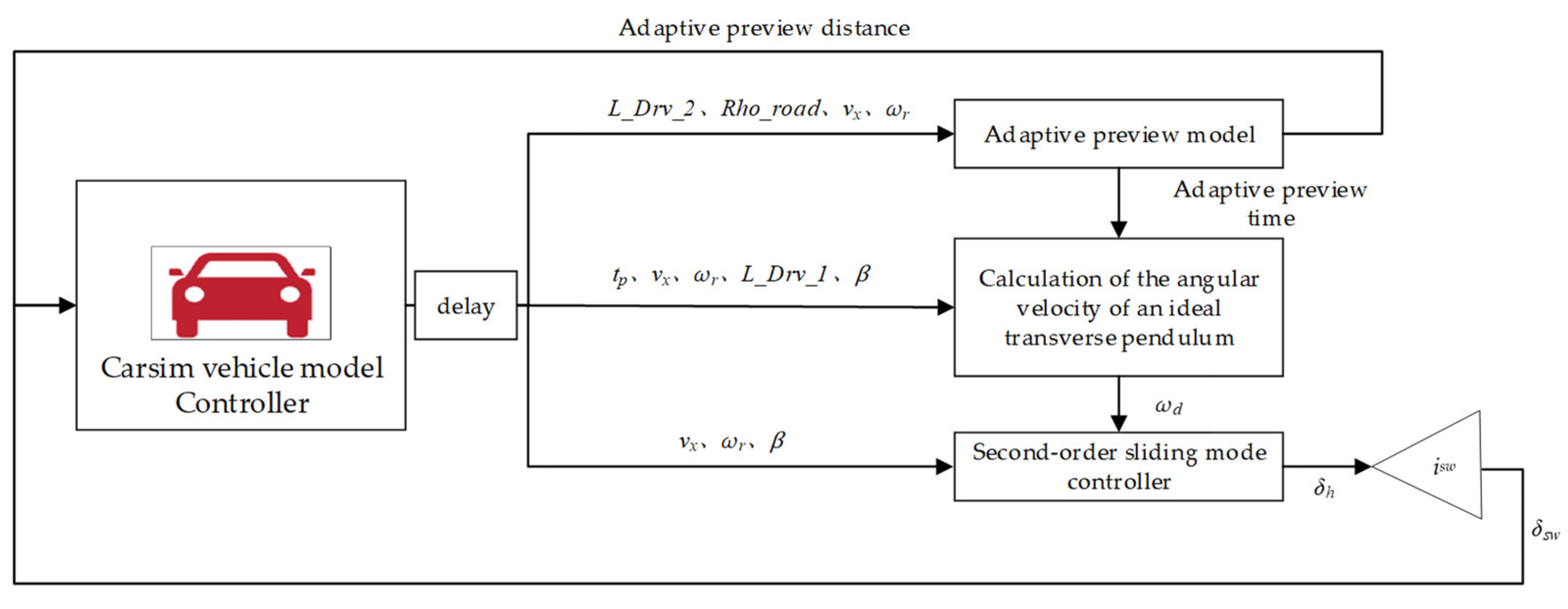
- This article designs a second-order sliding mode controller based on the ST algorithm, which combines an adaptive preview controller with the second-order sliding mode algorithm. The adaptive preview can take into account the trajectory deviation, road boundary, and overall vehicle motion response characteristics to solve for a suitable preview time and set a matching preview distance to make the controller more in line with the driver’s habits so that it can sense the road ahead in advance to make the corresponding control strategy. Finally, the Lyapunov function and phase plane analysis methods are used to prove its convergence and stability respectively;
- In designing the ST second-order sliding mode control algorithm, the chattering is also further reduced by combining a low-pass filter with the ST algorithm. This paper also proposes a method based on the standard deviation of the gradient to calculate the smoothness of the curve, using this parameter to evaluate the chattering of the curve, the standard deviation of the gradient was used to evaluate smoothness, and the smoothness after filtering is one-seventeenth of that before filtering;
- The ideal yaw rate can be obtained by adaptive preview control. The difference between the ideal yaw rate and the actual yaw rate is fed into the designed ST second-order sliding mode controller to solve the required steering wheel angle as the target for tracking control. To demonstrate the effectiveness of this controller, an MPC algorithm was designed for comparison experiments. Compared to the MPC controller, the tracking accuracy of the ST controller has improved to 64.42% and 51.02% at 36 and 54 km/h, respectively. At the same time, it was also compared with conventional sliding mode control and the results showed that the tracking accuracy of the ST controller has improved to 41.78%, and the smoothness of the ST controller is one-nineteenth that of the CSMC. This means the ST controller can produce inputs with weaker chattering; and
- Simulations are carried out on parameter uncertainties in this article, where parameter uncertainties include system parameter uptake and external disturbances, and Gaussian white noise is used to replace these uncertainties. With simulation at 36 and 54 km/h, the simulation results show that despite the effect of Gaussian white noise, the trajectory of the ST controller still fits the ideal trajectory and the tracking error does not exceed 0.3 m. Although there are slight fluctuations in the steering wheel angle and transverse angular velocity, they are still within the acceptable range and the actuator still works properly.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hao, Y. Overview on the Research of Lateral and Longitudinal Control for Intelligent Vehicles. Automob. Appl. Technol. 2022, 47, 158–161. [Google Scholar] [CrossRef]
- Jinghua, G.; Keqiang, L.; Yugong, L. Review on the research of motion control for intelligent vehicles. J. Automot. Saf. Energy 2016, 7, 151–159. [Google Scholar]
- Wiseman, Y. Autonomous Vehicles. In Advances in Information Quality and Management; Khosrow-Pour, D.B.A.M., Ed.; IGI Global: Harrisburg, PA, USA, 2021; pp. 1–11. ISBN 978-1-79983-479-3. [Google Scholar]
- Li, W. Research on Intelligent Vehicle Path Following Control Based on Preview Distance Active Optimization. Master’s Thesis, Jiangsu University, Zhenjiang, China, 2021. [Google Scholar] [CrossRef]
- Zhang, X.; Li, J. Lateral and longitudinal coordinated control for intelligent-electricvehicle trajectory-tracking based on LQR-dual PID. J. Automot. Saf. Energy 2021, 12, 346–354. [Google Scholar]
- Li, Y.; Liu, Y.; Feng, Q.; Nan, Y.; He, J.; Fan, J. Path tracking control for an intelligent commercial vehicle based on optimal preview and model predictive. J. Automot. Saf. Energy 2020, 11, 462–469. [Google Scholar] [CrossRef]
- Sun, H. Research on Tracking Control Method of Unmanned Vehicle Based on Sliding Mode Variable Structure. Master’s Thesis, Changchun University of Technology, Changchun, China, 2021. [Google Scholar] [CrossRef]
- Li, L.; Li, J.; Zhang, S. Trajectory tracking control of autonomous vehicles with optimized sliding mode control. J. Automot. Saf. Energy 2020, 11, 503–510. [Google Scholar] [CrossRef]
- Wang, K.; Li, Q.; Wang, Z.; Yang, J. Trajectory tracking control for automated vehicle based on NMPC considering vehicle rolling motion. Control Decis. 2021, 1–8. [Google Scholar] [CrossRef]
- Wang, Q.; Mao, Z.; Zhang, D.; He, Z.; Lv, Z. Lane Changing Path Tracking Control Based on Trajectory Prediction and Model Prediction. Control Eng. 2022, 4, 1–9. [Google Scholar] [CrossRef]
- Li, C.; Wang, S.; Liu, M.; Pneg, Z.; Nie, S. Research on the Trajectory Tracking Control of Autonomous Vehicle Based on the Multi-Objective Optimization. Automob. Technol. 2022, 8–15. [Google Scholar] [CrossRef]
- Chen, Y. AGV Trajectory Tracking System Based on Adaptive Fuzzy Control. Automob. Appl. Technol. 2021, 46, 22–24. [Google Scholar] [CrossRef]
- Sun, Z.; Zheng, J.; Man, Z.; Fu, M.; Lu, R. Nested Adaptive Super-Twisting Sliding Mode Control Design for a Vehicle Steer-by-Wire System. Mech. Syst. Signal Process. 2019, 122, 658–672. [Google Scholar] [CrossRef]
- Xu, M.; Fang, Y.; Li, J.; Zhao, X. Finite time distributed coordinated control for attitude of multi-spacecraft based on super-twisting algorithm. Control Theory Appl. 2021, 38, 924–932. [Google Scholar] [CrossRef]
- Altan, A. Performance of Metaheuristic Optimization Algorithms Based on Swarm Intelligence in Attitude and Altitude Control of Unmanned Aerial Vehicle for Path Following. In Proceedings of the 4th International Symposium on Multidisciplinary Studies and Innovative Technologies, Istanbul, Turkey, 22–24 October 2020. [Google Scholar] [CrossRef]
- Altan, A.; Hacıoğlu, R. Model Predictive Control of Three-Axis Gimbal System Mounted on UAV for Real-Time Target Tracking under External Disturbances. Mech. Syst. Signal Process. 2020, 138, 106548. [Google Scholar] [CrossRef]
- Belge, E.; Altan, A.; Hacıoğlu, R. Metaheuristic Optimization-Based Path Planning and Tracking of Quadcopter for Payload Hold-Release Mission. Electronics 2022, 11, 1208. [Google Scholar] [CrossRef]
- Huang, B.; Yang, Q. Trajectory Tracking Control Method of a Work-class ROV Based on a Super-twisting Second-order Sliding Mode Controller. J. Unmanned Undersea Syst. 2021, 29, 14–22. [Google Scholar] [CrossRef]
- Ao, D.; Huang, W.; Wong, P.K.; Li, J. Robust Backstepping Super-Twisting Sliding Mode Control for Autonomous Vehicle Path Following. IEEE Access 2021, 9, 123165–123177. [Google Scholar] [CrossRef]
- Hu, H.; Bei, S.; Zhao, Q.; Han, X.; Zhou, D.; Zhou, X.; Li, B. Research on Trajectory Tracking of Sliding Mode Control Based on Adaptive Preview Time. Actuators 2022, 11, 34. [Google Scholar] [CrossRef]
- Chen, W.; Tan, D.; Wang, H.; Wang, J.; Xia, G. A Class of Driver Directional Control Model Based on Trajectory Prediction. J. Mech. Eng. 2016, 52, 106–115. [Google Scholar] [CrossRef]
- Li, P. Research and Application of Traditional and Higher-Order Sliding Mode Control. Ph.D. Thesis, National University of Defense Technology, Changsha, China, 2011. [Google Scholar]
- Cai, C. Ship Straight-path Following Control Based on High-order Slide Mode. Master’s Thesis, Dalian Maritime University, Dalian, China, 2017. [Google Scholar]
- Bai, S. Research on Intelligent Vehicle Trajectory Tracking Method Based on Model Predictive Control. Master’s Thesis, Harbin University of Science and Technology, Harbin, China, 2021. [Google Scholar] [CrossRef]
- Mohammad, R.; Navid, M.; Saeid, N.; Shady, M. Model Predictive Control with Learned Vehicle Dynamics for Autonomous Vehicle Path Tracking. IEEE Access 2021, 9, 128233–128249. [Google Scholar] [CrossRef]
- Xiao, L. Sliding Mode Control for Aerospace Power System; Zhejiang University Press: Hangzhou, China, 2018; pp. 242–256. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Comments |
|---|---|---|
| T | 0.5 | Time associated with vehicle steering response characteristics |
| λ | 60 | Parameter of ST algorithm |
| k1 | 0.2 | Parameter of ST algorithm |
| k2 | 0.1 | Parameter of ST algorithm |
| ξ | 6 | The cut-off frequency of a low-pass filter |
| a | 1.016 | Distance from center of mass to front wheel |
| b | 1.562 | Distance from center of mass to rear wheel |
| Cf | 108,861 | Lateral stiffness of front wheel |
| Cr | 108,861 | Lateral stiffness of rear wheel |
| Iz | 1523 | Yaw inertia |
| isw | 19.562 | Angular velocity ratio |
| Parameters | Values | Comments |
|---|---|---|
| Np | 30 | Predicted step size |
| Nc | 60 | Control step |
| Row | 10 | Relaxation factor weight |
| Parameters | Input/Output Channels | Comments |
|---|---|---|
| Lead distance to driver preview point 1 | IMP_LX_SEN_1 | m |
| Steering wheel angle | IMP_STEER_SW | deg |
| Lateral distance to target point 2 | L_Drv_2 | m |
| Longitudinal speed | Vx_SM | km/h |
| Yaw rate | AV_Y | deg/s |
| Slip angle | Beta | deg |
| Lateral distance to target point 2 | L_Drv_1 | s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bei, S.; Hu, H.; Li, B.; Tian, J.; Tang, H.; Quan, Z.; Zhu, Y. Research on the Trajectory Tracking of Adaptive Second-Order Sliding Mode Control Based on Super-Twisting. World Electr. Veh. J. 2022, 13, 141. https://doi.org/10.3390/wevj13080141
Bei S, Hu H, Li B, Tian J, Tang H, Quan Z, Zhu Y. Research on the Trajectory Tracking of Adaptive Second-Order Sliding Mode Control Based on Super-Twisting. World Electric Vehicle Journal. 2022; 13(8):141. https://doi.org/10.3390/wevj13080141
Chicago/Turabian StyleBei, Shaoyi, Hongzhen Hu, Bo Li, Jing Tian, Haoran Tang, Zhenqiang Quan, and Yunhai Zhu. 2022. "Research on the Trajectory Tracking of Adaptive Second-Order Sliding Mode Control Based on Super-Twisting" World Electric Vehicle Journal 13, no. 8: 141. https://doi.org/10.3390/wevj13080141
APA StyleBei, S., Hu, H., Li, B., Tian, J., Tang, H., Quan, Z., & Zhu, Y. (2022). Research on the Trajectory Tracking of Adaptive Second-Order Sliding Mode Control Based on Super-Twisting. World Electric Vehicle Journal, 13(8), 141. https://doi.org/10.3390/wevj13080141