Abstract
Unmanned aerial vehicles (UAVs) are a promising means of optimizing existing and developing new technological processes at modern airports. At present, in most countries of the world, airports are still closed to UAVs. To allow UAVs to operate at the airport, it is necessary to solve the problem of ensuring the safety of their movement. In this paper, we consider modern methods for ensuring the safety of the movement of electric multicopters (EMs), which are a type of UAV that, according to its technical characteristics, can be operated at the airport in various applications, including for transportation or monitoring on the territory of the airport. To allow EMs to work at the airport, this paper proposes the joint use of two methods of ensuring traffic safety developed in recent years. The results of the conducted expert evaluation show that such a solution can be considered as the key to the approval of EMs for operation at airports.
1. Introduction
A modern airport is one of the most complex transport systems, where hundreds of air and ground vehicles operate simultaneously at one territorially limited point [1,2,3,4].
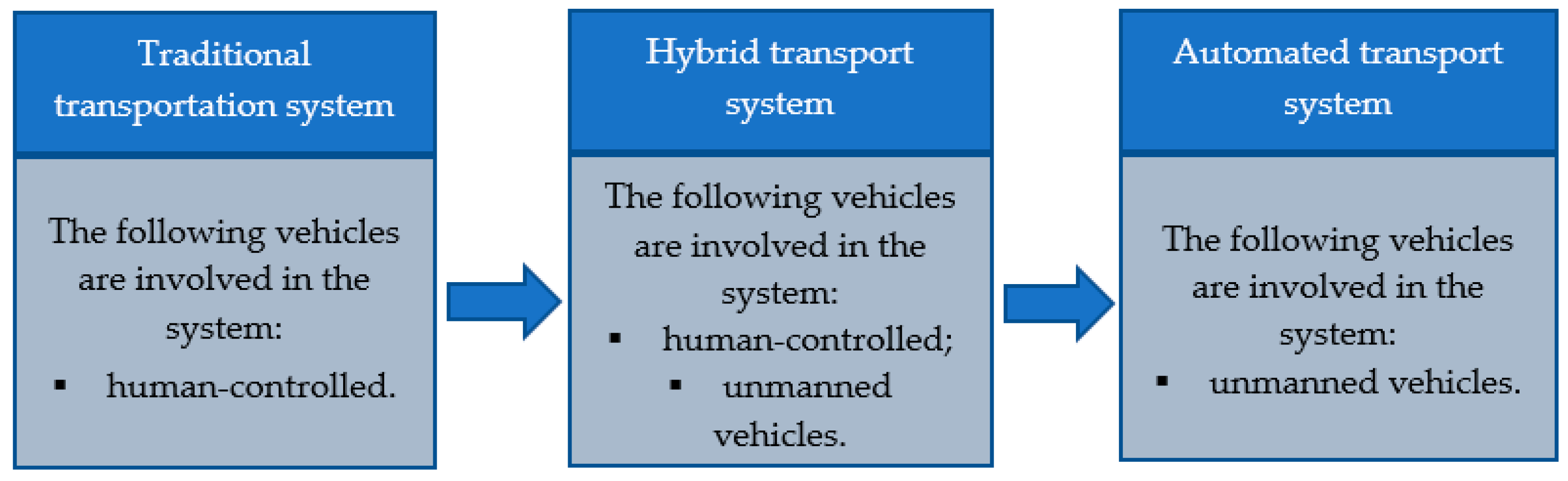
The introduction of unmanned vehicles (land and air) into the airport transport system will lead to a radical transformation of this system and its transition to a new state: a hybrid transport system (Figure 1). A hybrid transport system can be defined as a transport system in which unmanned and manned vehicles work together. The hybrid transport system is a transition from a traditional transport system, which includes manned vehicles, to an automated transport system, in which unmanned vehicles operate.
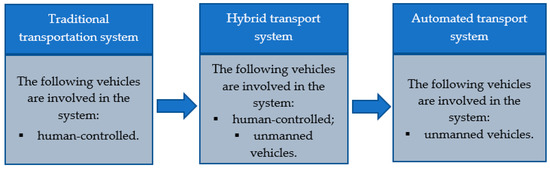
Figure 1.
Algorithm for transforming a traditional transport system into an automated one.
The first stage in the transformation of an airport into a hybrid transport system is the integration of unmanned aerial vehicles into its operation.
1.1. Perspective Directions of Application of UAVs at Airports
Considering the promising areas of application of unmanned aerial vehicles at airports, we can note two main areas of application.
Direction 1: monitoring. This direction includes remote video monitoring using a video camera installed on board the UAV to oversee the processes taking place on the territory of the airport and along its perimeter, for various purposes, including ensuring transport security. In addition to video cameras, UAVs can also be equipped with various sensors and systems, such as thermal imagers, night vision systems, etc. [5,6,7,8,9,10,11,12], which expands the options for using UAVs at the airport and allows the creation of fundamentally new applications; for example, the possibility of monitoring aircraft at airports using UAVs equipped with digital scanners is discussed in [13,14,15].
The authors of [16] propose employing unmanned aerial vehicles to surveil ground vehicles to ensure airport security. It is suggested that, using artificial intelligence, UAVs will be able to detect and determine the nature of interactions between land transportation vehicles and airplanes, and it will be possible to detect events with an imminent threat of turning into an accident.
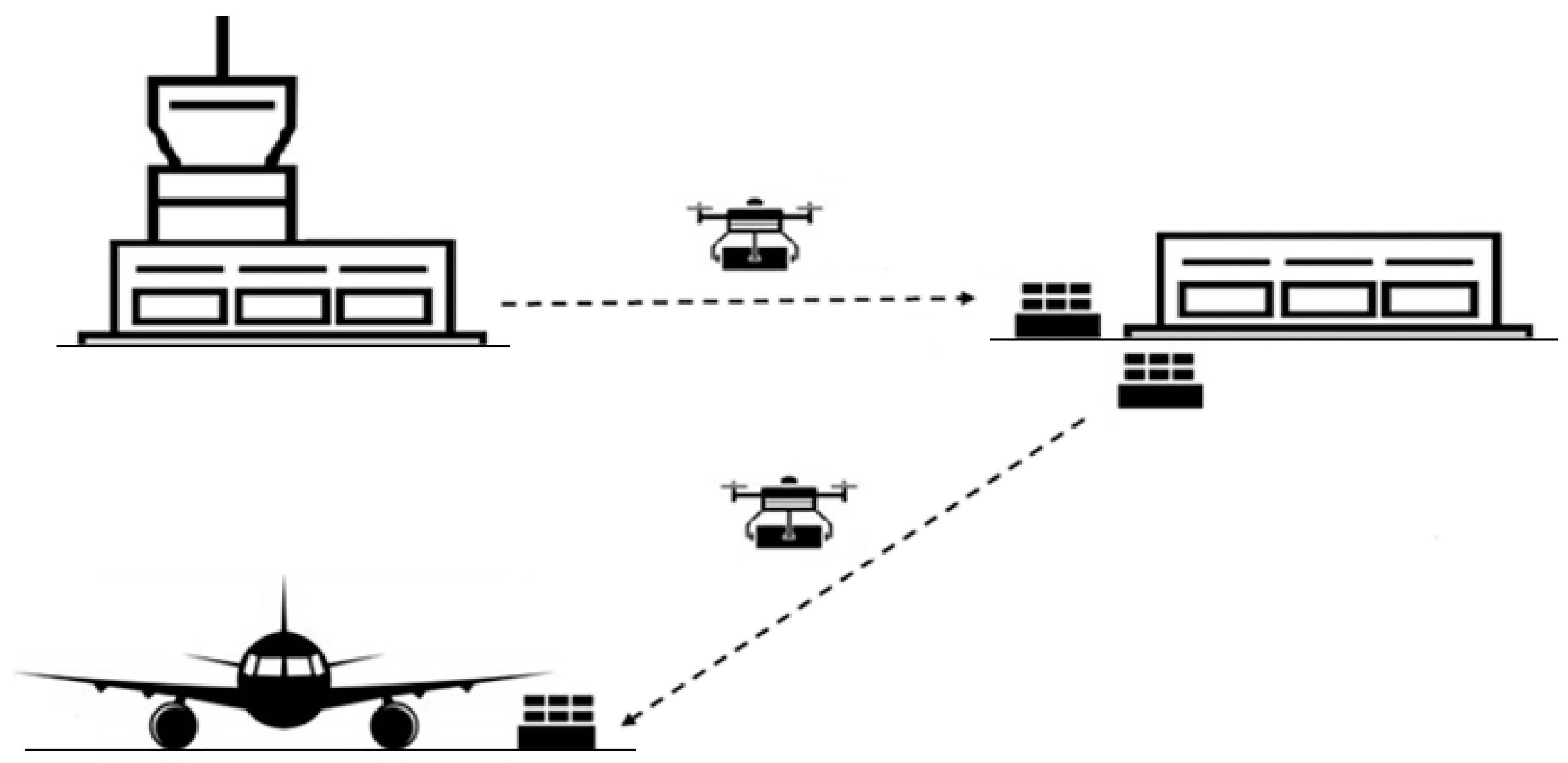
Direction 2: transportation. One of the possibilities for the use of UAVs in this direction is the transportation of various cargoes between airport terminals or between terminals and aircraft using a UAV-deliverer (Figure 2).
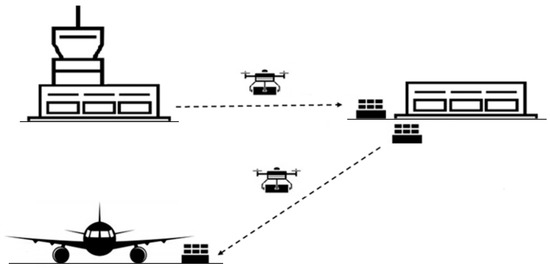
Figure 2.
UAV applications for airport transportation.
The advantages of using delivery UAVs are the possibility of complete automation of the transportation process, an increase in the speed of transportation, as well as an increase in airport throughput by unloading existing transport lines [17,18,19,20,21].
Until now, the limitation in the use of unmanned aerial vehicles for transportation has been their small carrying capacity, on average 1–5 kg [22]. However, at the moment, there are already cargo UAVs with a significantly greater payload and flight range than small delivery UAVs used for delivery on the “last mile”. Thus, the Volocopter company recently tested its VoloDrone, a medium-range cargo electric multicopter, which is capable of delivering a 200 kg load placed on a standard Euro pallet over a distance of up to 40 km [23]. Such a UAV will be able to transport up to 30 tons of cargo per day between airport terminals located at a distance of 5–7 km.
Boeing is also preparing to enter the market with its new development-an electric quadcopter CAV with a payload 227 kg [24].
1.2. Type of UAV Suitable for Airport Operation
Comparing the two main types of unmanned aerial vehicles (fixed-wing and moving-wing) and their characteristics [22], we can conclude that the most preferred type for airport operations is a moving-wing UAV, operating similarly to a light helicopter, capable of taking to the air according to a vertical takeoff/landing pattern and maneuvering in confined spaces, close to aircraft, cars, communications and people.
When determining the optimal configuration of the UAV power plant operating at the airport, it should be noted that such a UAV should not use fossil fuels (gasoline, diesel fuel, etc.), but instead should be electric. This is explained by the fact that a UAV using fossil fuels can ignite in the event of an accident with its participation, which is especially dangerous when working at an airport where the UAV can collide with an aircraft carrying hundreds of passengers [25,26].
Based on this analysis, we can conclude that any UAV operating at the airport must be rotary-winged and run on electricity. Further in this paper, such unmanned aerial vehicles will be designated as electric multicopters (EMs).
1.3. Current Restrictions on the Use of Electric Multicopters at Airports
Currently, in most countries of the world, airports are included in closed geofences for flights of electric multicopters [26].
The inclusion of an airport in the geofence closed for EMs flights means that electric multicopters cannot operate on its territory.
The inclusion of airports in closed geozones is justified by the unresolved problem of ensuring the safety of EMs traffic, which consists primarily in the risk of a collision of a multicopter with vulnerable elements of the airport (traffic control systems, energy communications, etc.), vehicles (aircraft and cars), and people located on the territory of the airport.
Such events may occur, including in the event of a loss of EM control. Loss of control of the multicopter can occur due to technical malfunctions in the on-board systems or failures in the radio channel through which the remote pilot controls the EM; cyber threats [27,28,29,30,31], for example, remote control interception, also pose a serious danger.
Resolving the main condition for the exclusion of airports from closed geofences for the subsequent admission of electric multicopters to work at airports requires solving the problem of ensuring the safety of their movement.
2. Analysis of Methods for Ensuring the Safety of Movement of Electric Multicopters during Their Operation at the Airport
There are both public research programs and private studies aimed at ensuring the traffic safety of medium and small multicopters that are not equipped with GNSS systems, due to the small size and payload of such aircraft. Below we provide an analysis of the work most applicable to such objects at an airport.
U-space: The most significant unmanned aerial vehicle integration program currently being implemented in the European Union is the U-Space initiative [32], which is part of the joint Single European Sky Research Project (SESAR). SESAR is a public–private partnership involving the European Commission, the European Board and a number of air navigation service providers and industry stakeholders. These players are developing the “U-Space” concept, which includes a set of digitally controlled services that will allow complex large-scale unmanned operations to take into account a high level of autonomy in difficult conditions.
NASA Unmanned Aircraft System Traffic Management: NASA is collaborating on the Unmanned Aircraft System Traffic Management program with the US Federal Aviation Administration. The purpose of the program is the development of traffic control systems for civilian UAVs to ensure safe flights in airspace at low altitude [33].
European Aviation Safety Agency drone categories: The European Aviation Safety Agency (EASA) is in the process of developing new regulations [34] regarding non-state use of UAVs.
All these programs provide for improving the safety of UAV traffic at airports by allocating separate sectors or air corridors for UAV traffic. System for managing the route of drones. In [35], a drone route control system was proposed. The system works as follows: On the monorail, laid along the route set for the movement of the drone, there is a special ground-based mobile platform that can move freely on the monorail. The drone, which acts as a mover, is attached to the platform with a holding cable.
As a result, the drone attached to the system can only move along the route set for it, which improves the safety of its movement.
Also, at present, the following emergency algorithms are already being used to ensure the safety of the movement of medium and small multicopters:
- -
- performance of anti-emergency maneuvers by a remote pilot upon detection of obstacles in the path of the EM movement [36,37];
- -
- automatic activation of the “self-destruction” mode, which provides for stopping the engines and descending to the ground in case of loss of control of the EM by a remote pilot or the occurrence of critical malfunctions in on-board systems [38,39,40].
Despite the development of the methods and algorithms described above, state regulatory authorities have not yet granted permission for electric multicopters to operate at airports. From this we can conclude that each method separately is not sufficient to ensure the safety of EMs traffic at a level acceptable for obtaining permission to work at the airport.
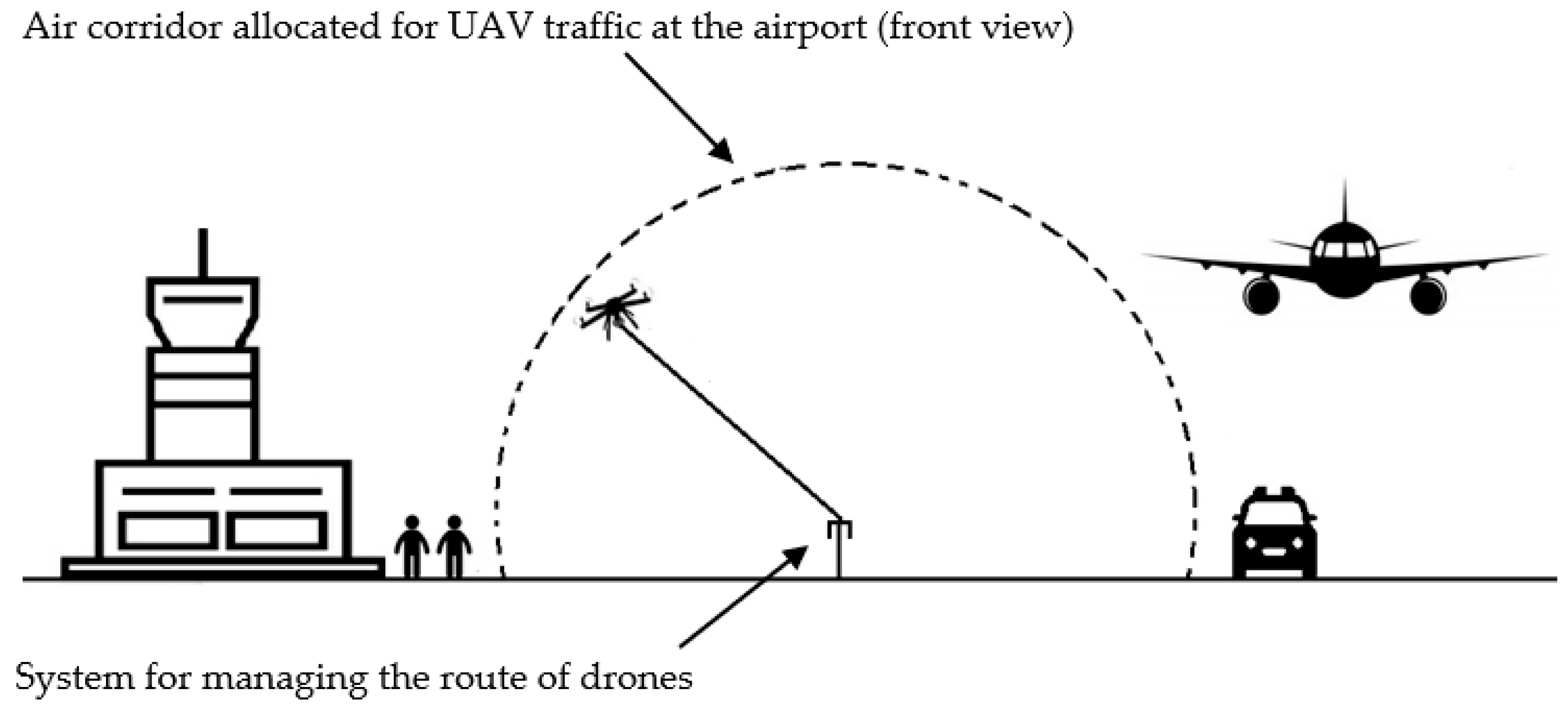
In our opinion, ensuring the safety of the movement of electric multicopters during their operation at the airport can be ensured by the joint application of the methods developed in recent years to ensure traffic safety. Thus, the allocation of separate sectors or air corridors for UAV movement provided in [32,33] can be supplemented by the use of the drone route control system proposed in [35]. Their joint application will allow us to form the circuit shown in Figure 3.
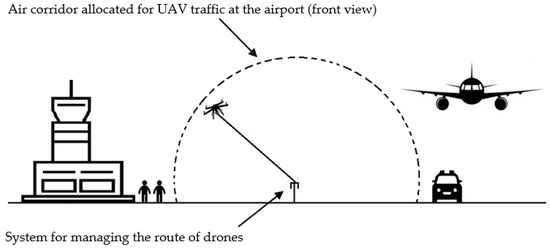
Figure 3.
Scheme for ensuring the safety of EM traffic by allocating a separate air corridor and applying the system for managing the route of drones.
3. Assessment of the Prospects for the Admission of Electric Multicopters for Operation at the Airport
Considering the procedures for obtaining an EMs permit for operation at airports used in various countries, we see that, as a rule, the permit is issued by the state body that controls the field of civil aviation on the basis of a conclusion about the sufficiency of the implemented security measures. Such an opinion is usually prepared by a group of experts in the field of flight safety, as well as transport (aviation) security.
Based on this, we decided to conduct a survey of experts regarding whether electric multicopters can be allowed to operate at an airport using one or both methods of ensuring traffic safety, as shown in Figure 3.
To conduct this survey, a group of seven experts in the field of flight safety, transport (aviation) security and ground transport safety was formed.
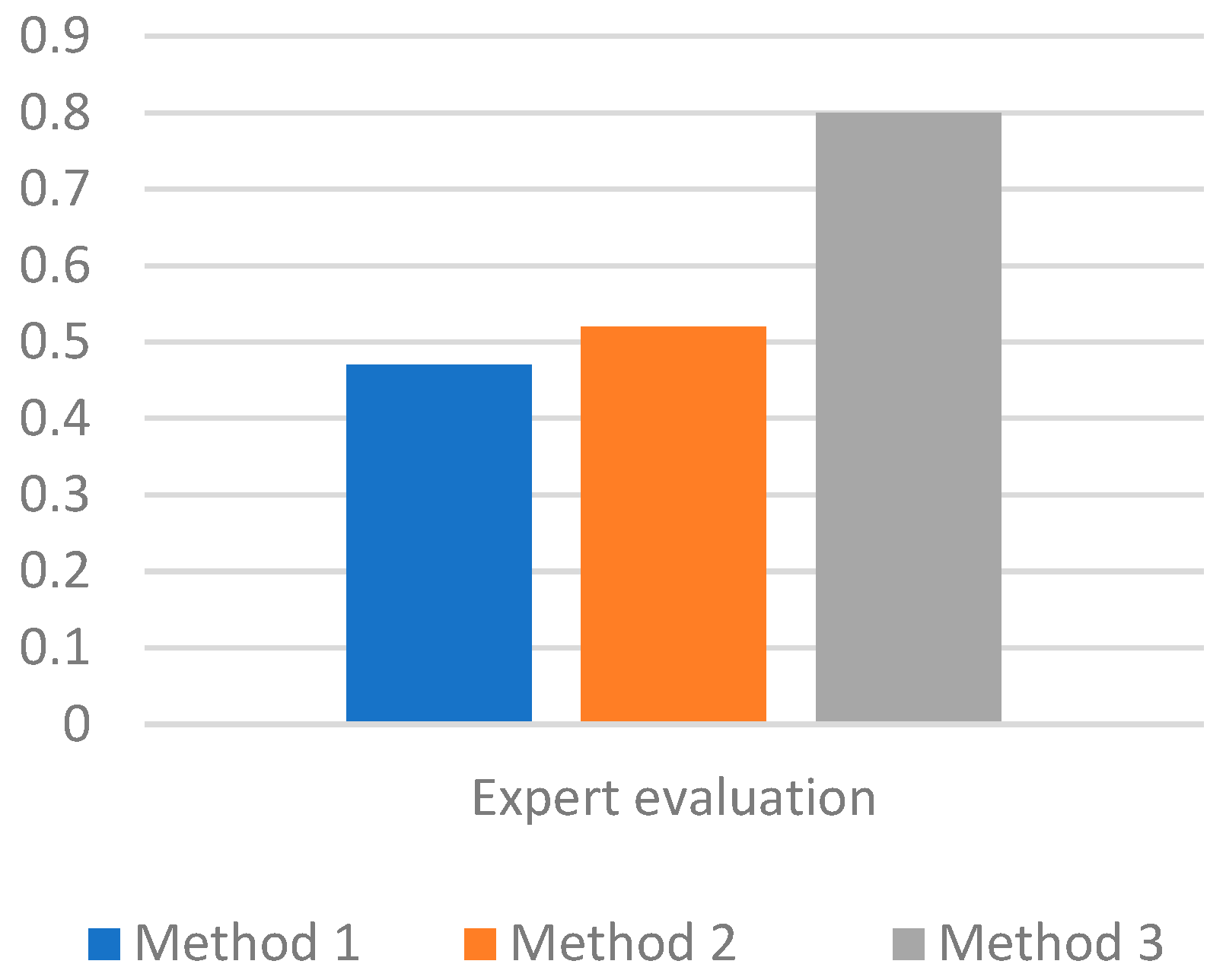
The experts were asked to evaluate whether electric multicopters can be allowed to operate at the airport, using several methods of ensuring traffic safety together. To do this, each expert had to evaluate each of the following three options.
- (M1) Allocation for the operation of EMs of individual sectors or air corridors at the airport;
- (M2) Application of the drone route control system during the operation of the EV at the airport;
- (M3) Joint application of methods M1 and M2.
The rating was given on a scale from 0 ˃ 1. The transformation of quantitative assessments into qualitative ones was as follows: 0 ˃ 0.3, method is not effective; 0.3 ˃ 0.5, method increases the EMs traffic safety at a level insufficient for allowing EMs to operate at the airport; 0.5 ˃ 1 method increases the EV traffic safety at a level sufficient to allow EMs to operation at the airport.
The entire evaluation process took place in three stages.
Stage 1. Creation of an expert group. The number of evaluated methods was n = 3, while the number of experts was m = 7.
Stage 2. Expert opinions collected through a questionnaire survey (Table 1).

Table 1.
Peer review.
Step 3. Expert evaluation data processed.
The experts’ estimates were sorted in ascending order, with the position in the sorted sample being a rank, resulting in a rank table (Table 2).
Table 2.
Rank table.
Calculations (Table 2) were performed in the following sequence:
- The sum of the ranks obtained by each estimated algorithm was calculated.
- The arithmetic mean sum of the ranks was calculated.
- The deviation of the sum of ranks of each factor (M1–M3) from the arithmetic mean sum of ranks was calculated.
- The deviation of the sums of the ranks of each factor was squared and the obtained numbers were summed up; as a result, the sum of squares of the rank differences (S) was found.
Step 4. Assessment of the consistency of expert opinions.
Concordance coefficient:
where S = 73.5, n = 3, m = 7.
The concordance coefficient varies in the range of 0 < W < 1, with 0 being a complete inconsistency of expert opinions and 1 being a complete consistency. The result was 0.78, which indicates a high degree of consistency and allows us to consider the result of the assessment to be sufficiently reliable.
4. Results
A survey of experts showed the following results (Figure 4).
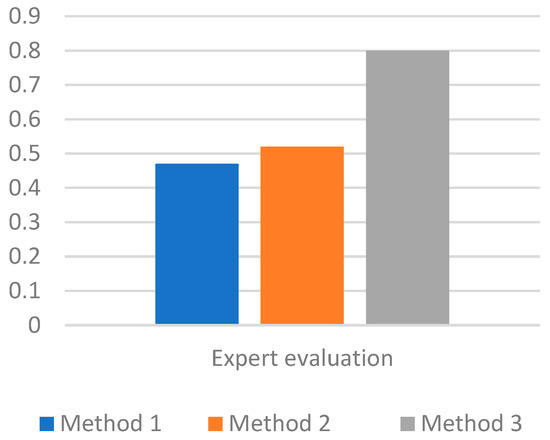
Figure 4.
Evaluation by experts, which method more effectively solves the problem of ensuring the safety of the movement of electric multicopters operated at the airport.
5. Discussion
Unmanned aerial vehicles are a promising means of optimizing existing and developing new technological processes at modern airports. Currently, in most countries of the world, airports are still closed to the operation of electric multicopters. To allow EMs to work at the airport, in this paper, some of the methods of ensuring traffic safety developed in recent years were shared. The results of the peer review show that such a solution is an effective way to ensure the safety of the movement of electric multicopters, and can be considered as a possible key to the approval of EMs for operation at airports. The results of the study may be of interest to researchers working in the field of ensuring the safety of unmanned aerial vehicles, developers of UAV traffic safety systems, and persons involved in making decisions on the admission of UAVs to operation at airports.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
No data were used to support this study.
Conflicts of Interest
The author declares no conflict of interest.
References
- ICAO Safety Report 2020. Available online: https://www.icao.int/safety/Documents/ICAO_SR_2020_final_web.pdf (accessed on 10 February 2022).
- IATA. Runway Safety Accident Analysis Report; Technical Report. International Air Transport Association, 2020. Available online: https://www.iata.org/en/publications/safety-report/ (accessed on 10 February 2022).
- Alomar, I.; Tolujevs, J. Optimization of ground vehicles movement on the aerodrome. Transp. Res. Procedia 2017, 24, 58–64. [Google Scholar] [CrossRef]
- Wilke, S.; Majumdar, A.; Ochieng, W.Y. Airport surface operations: A holistic framework for operations modeling and risk management. Saf. Sci. 2014, 63, 18–33. [Google Scholar] [CrossRef]
- Sultonov, F.; Park, J.-H.; Yun, S.; Lim, D.-W.; Kang, J.-M. Mixer U-Net: An Improved Automatic Road Extraction from UAV Imagery. Appl. Sci. 2022, 12, 1953. [Google Scholar] [CrossRef]
- Flammini, F.; Pragliola, C.; Smarra, G. Railway infrastructure monitoring by drones. In Proceedings of the 2016 International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles & International Transportation Electrification Conference (ESARS-ITEC), Toulouse, France, 2–4 November 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Mann, S.; Pierce, C.; Hernandez, J.; Li, Q.; Zheng, B.C.; Xiang, Y.X. Drone Swarms for Sensing-of-Sensing. In Proceedings of the 2019 IEEE SENSORS, Montreal, QC, Canada, 27–30 October 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Lyovin, B.A.; Shvetsov, A.V.; Setola, R.; Shvetsova, S.V.; Tesei, M. Method for remote rapid response to transportation security threats on high speed rail systems. Int. J. Crit. Infrastruct. 2019, 15, 324. [Google Scholar] [CrossRef]
- Sharma, M.; Gupta, A.; Gupta, S.K.; Alsamhi, S.H.; Shvetsov, A.V. Survey on Unmanned Aerial Vehicle for Mars Exploration: Deployment Use Case. Drones 2022, 6, 4. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Almalki, F.A.; AL-Dois, H.; Shvetsov, A.V.; Ansari, M.S.; Hawbani, A.; Gupta, S.K.; Lee, B. Multi-Drone Edge Intelligence and SAR Smart Wearable Devices for Emergency Communication. Wirel. Commun. Mob. Comput. 2021, 2021, 6710074. [Google Scholar] [CrossRef]
- Gopi, S.P.; Magarini, M.; Alsamhi, S.H.; Shvetsov, A.V. Machine Learning-Assisted Adaptive Modulation for Optimized Drone-User Communication in B5G. Drones 2021, 5, 128. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Almalki, F.A.; Afghah, F.; Hawbani, A.; Shvetsov, A.V.; Lee, B.; Song, H. Drones’ Edge Intelligence Over Smart Environments in B5G: Blockchain and Federated Learning Synergy. IEEE Trans. Green Commun. Netw. 2022, 6, 295–312. [Google Scholar] [CrossRef]
- Sun, Y.; Ma, O. Automating Aircraft Scanning for Inspection with a UAV and Reinforcement Learning Technique, Preprint (Version 1). 2021. Available online: https://doi.org/10.21203/rs.3.rs-1193469/v1 (accessed on 10 February 2022).
- Tzitzilonis, V.; Malandrakis, K.; Fragonara, L.Z.; Domingo, J.A.G.; Avdelidis, N.P.; Tsourdos, A.; Forster, K. Inspection of Aircraft Wing Panels Using Unmanned Aerial Vehicles. Sensors 2019, 19, 1824. [Google Scholar] [CrossRef] [Green Version]
- Siegel, M.; Gunatilake, P.; Podnar, G. Robotic assistants for aircraft inspectors. IEEE Instrum. Meas. Mag. 2018, 1, 16–30. [Google Scholar] [CrossRef]
- Blasch, E.; Wang, Z.; Shen, D.; Ling, H.; Chen, G. Surveillance of ground vehicles for airport security. In Proceedings of the SPIE 9089, Geospatial InfoFusion and Video Analytics IV; and Motion Imagery for ISR and Situational Awareness II, 90890B, Baltimore, MD, USA, 19 June 2014. [Google Scholar] [CrossRef]
- Gupta, A.; Afrin, T.; Scully, E.; Yodo, N. Advances of UAVs toward Future Transportation: The State-of-the-Art, Challenges, and Opportunities. Future Transp. 2021, 1, 326–350. [Google Scholar] [CrossRef]
- Škrinjar, J.P.; Skorput, P.; Furdić, M. Application of Unmanned Aerial Vehicles in Logistic Processes. In New Technologies, Development and Applications; Springer: Cham, Switzerland, 2018; pp. 359–366. [Google Scholar]
- Roca-Riu, M.; Menendez, M. Logistic deliveries with drones: State of the art of practice and research. In Proceedings of the 19th Swiss Transport Research Conference (STRC 2019), Ascona, Italy, 15–17 May 2019. [Google Scholar]
- Ozdemir, U.; Aktas, Y.O.; Vuruskan, A.; Dereli, Y.; Tarhan, A.F.; Demirbag, K.; Erdem, A.; Kalaycioglu, G.D.; Ozkol, I.; Inalhan, G. Design of a Commercial Hybrid VTOL UAV System. J. Intell. Robot. Syst. 2013, 74, 371–393. [Google Scholar] [CrossRef]
- Cherif, N.; Jaafar, W.; Yanikomeroglu, H.; Yongacoglu, A. Disconnectivity-Aware Energy-Efficient Cargo-UAV Trajectory Planning with Minimum Handoffs. In Proceedings of the ICC 2021-IEEE International Conference on Communications, Montreal, QC, Canada, 14–23 June 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Stewart, M.; Martin, S. Unmanned Aerial Vehicles: Fundamentals, Components, Mechanics, and Regulations. In Unmanned Aerial Vehicles, Chapter 1; Nova Science Publishers: Hauppauge, NY, USA, 2020. [Google Scholar]
- VoloDrone. Available online: https://www.volocopter.com/solutions/volodrone/ (accessed on 10 February 2022).
- Boeing CAV. Available online: https://www.boeing.com/features/highlights/2020/cargo-air-vehicle/index.page (accessed on 10 February 2022).
- Shvetsov, A.V. Analysis of Emergency Situations Arising from the Interaction of Air and Ground Vehicles. Rus. Aer. 2021, 64, 805–809. [Google Scholar] [CrossRef]
- United States Government Accountability Office. Small Unmanned Aircraft Systems. FAA Should Improve Its Management of Safety Risks. GAO-18-110 Small Unmanned Aircraft Systems. Available online: https://www.gao.gov/assets/gao-18-110.pdf (accessed on 10 February 2022).
- UAS ATM Integration Operational Concept. 2018 European Organisation for the Safety of Air Navigation (Eurocontrol). Available online: https://www.eurocontrol.int/sites/default/files/publication/files/uas-atm-integration-operational-concept-v1.0-release%2020181128.pdf (accessed on 10 February 2022).
- Lykou, G.; Moustakas, D.; Gritzalis, D. Defending Airports from UAS: A Survey on Cyber-Attacks and Counter-Drone Sensing Technologies. Sensors 2020, 20, 3537. [Google Scholar] [CrossRef] [PubMed]
- Shvetsov, A.; Gromov, V. Analysis of The Airport Noise Impact on the Occurrence of Emergency Situations. Akustika 2021, 41, 22–24. [Google Scholar] [CrossRef]
- Shvetsov, A. Analysis of Accidents Resulting from the Interaction of Air and Ground Vehicles at Airports. Transp. Res. Procedia 2021, 59, 21–28. [Google Scholar] [CrossRef]
- Shvetsov, A. Methods of Reducing the Accident Rate of Technological Vehicles of the Airport. Transp. Res. Procedia 2022, 61, 537–541. [Google Scholar] [CrossRef]
- SESAR 2020. Eurocontrol. 2020. Available online: https://www.eurocontrol.int/publication/unmanned-aircraft-systems-uas-atm-integration (accessed on 10 February 2022).
- Unmanned Aircraft System Traffic Management; National Aeronautics and Space Administration (NASA): Washington, DC, USA, 2018. Available online: https://utm.arc.nasa.gov/index.shtml (accessed on 10 February 2022).
- UAS ATM Integration; European Organisation for the Safety of the Air Navigation: Brussels, Belgium, 2018; Available online: https://www.eurocontrol.int/sites/default/files/publication/files/uas-atm-integration-operational-concept-v1.0-release%2020181128.pdf (accessed on 10 February 2022).
- Shvetsova, S.; Shvetsov, A. 2020 Ensuring Safety and Security in Employing Drones at Airports. J. Transp. Secur. 2021, 14, 41–53. Available online: http://link.springer.com/article/10.1007/s12198-020-00225-z (accessed on 10 February 2022). [CrossRef]
- Thanh, H.L.N.N.; Hong, S.K. Completion of Collision Avoidance Control Algorithm for Multicopters Based on Geometrical Constraints. IEEE Access 2018, 6, 27111–27126. [Google Scholar] [CrossRef]
- Fourlas, G.K.; Karras, G.C. A Survey on Fault Diagnosis and Fault-Tolerant Control Methods for Unmanned Aerial Vehicles. Machines 2021, 9, 197. [Google Scholar] [CrossRef]
- Shvetsov, A.V.; Shvetsova, S.V. A Method for Managing the Route of an Unmanned Aerial Vehicle. Rus. Aer. 2021, 64, 142–145. [Google Scholar] [CrossRef]
- Huttunen, M. Civil unmanned aircraft systems and security: The European approach. J. Transp. Secur. 2019, 12, 83–101. [Google Scholar] [CrossRef] [Green Version]
- Pérez-Castán, J.A.; Comendador, F.G.; Cardenas-Soria, A.B.; Janisch, D.; Valdés, R.M.A. Identification, Categorisation and Gaps of Safety Indicators for U-Space. Energies 2020, 13, 608. [Google Scholar] [CrossRef] [Green Version]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).