
Optimization of Control Strategy for Orderly Charging of Electric Vehicles in Mountainous Cities

 ,
, 

Abstract
1. Introduction
2. EV Centralized Charging Scheduling Model
2.1. Analysis of Charging Behavior for a Single EV
2.1.1. Charging Characteristics under Daily Mileage Demand
2.1.2. Initial Charge State Constraint
2.1.3. Miles Traveled
2.2. Electric Vehicle State Model
- (1)
- Detailed statistics of an EV’s status data, which is a prerequisite for an EV aggregator to conduct orderly charging. The time to start charging your EV and departure time from the power system is the EV trip end time and trip start time, and the values used in the scenario are obtained by combining the latest travel data from across the United States.
- (2)
- The daily driving range of EVs is a factor that affects the initial state of the battery.
- (3)
- The initial battery charge is charging information for EVs arriving at charging posts. The battery state expectation represents the highest level of user satisfaction, and the minimum charge state is the minimum charge requirement for the next trip the user plans.
- (4)
- Whether or not to obey the dispatch is determined by the EV’s choice and state of charge.
- (5)
- The charge state indicates whether the EV is charging or not and is expressed as:
2.3. Electric Vehicle Centralized Charging Scheduling Model
2.3.1. The Objective Function
2.3.2. User Requirements Constraints
2.3.3. Control Time Constraints
2.3.4. Transformer Capacity Constraint
2.3.5. Charging Constraint
3. Dispersion Control Optimization Strategy under Lagrange Relaxation Method
3.1. Decentralized Charging Strategy
3.2. Lagrange Relaxation Problem for the Original Problem
3.3. Pairing Problems
3.4. The Upper and Lower Boundary of the Original Problem
3.5. Dual Gap Problem
3.6. Sub-Gradient Method
3.7. Step Length Problem
3.8. Determine if the Dual Gap Meets the Accuracy Requirements
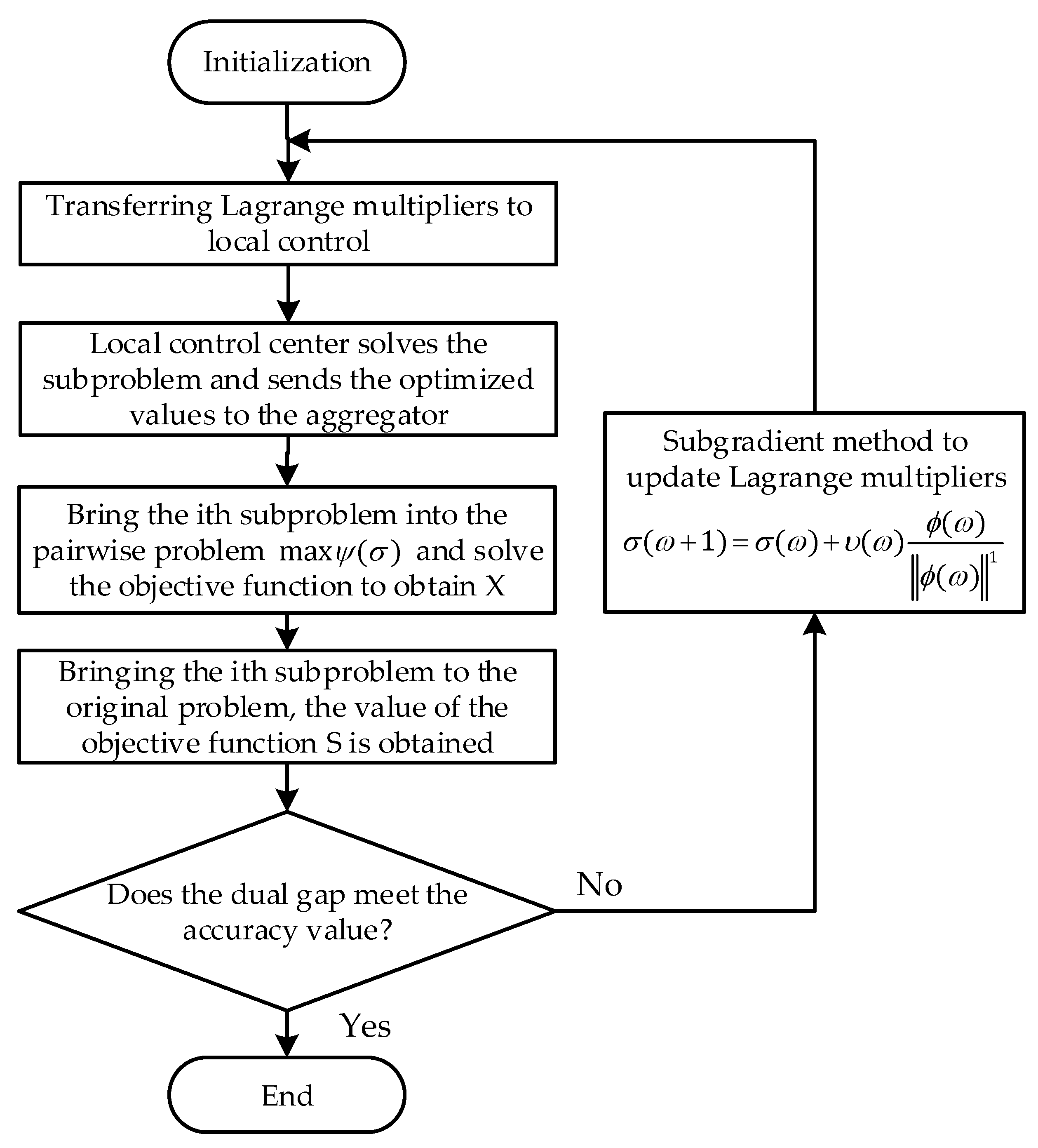
3.9. Decentralized Optimization Flow Chart
4. Example Analysis
4.1. Decentralized Optimization Mechanism on the Basis of Lagrangian Relaxation Method
4.2. Simulation Scene Setting
4.3. Experimental Results and Analysis
4.4. Contrast Analysis
5. Conclusions
- (1)
- The efficiency of this algorithm is better compared to the centralized charging model of this algorithm. The algorithm also has a higher solution speed compared with other algorithms, which is more practical for the growing scale of electric vehicles.
- (2)
- The access probability of EV charging for users in mountainous cities is considered, the influence weight of terrain is increased, and the gains of the solved EV pieces aggregators are more accurate, which is conducive to the orderly charging control strategy of aggregators.
- (3)
- The optimized EV load curve is smoother, which plays the role of “peak-shaving and valley-filling”, and the effect of peak-shaving and valley-filling is more obvious as the scale of EVs grows larger, which also ensures the service tariff revenue of aggregators.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, L.; Wan, Y.; Cao, W.; Cao, Y. Multi-objective orderly charging strategy for electric vehicles based on interactive network model. IEEJ Trans. Electr. Electron. Eng. 2021, 16, 519–525. [Google Scholar] [CrossRef]
- Boudina, R.; Wang, J.; Benbouzid, M.; Khoucha, F.; Boudour, M. Impact evaluation of large scale integration of electric vehicles on power grid. Front. Energy 2018, 14, 337–346. [Google Scholar] [CrossRef]
- Iqbal, S.; Xin, A.; Jan, M.U.; Abdelbaky, M.A.; Rehman, H.U.; Salman, S.; Rizvi, S.A.A.; Aurangzeb, M. Aggregation of EVs for Primary Frequency Control of an Industrial Microgrid by Implementing Grid Regulation & Charger Controller. IEEE Access 2020, 8, 141977–141989. [Google Scholar]
- Iqbal, S.; Xin, A.; Jan, M.U.; Salman, S.; Zaki, A.U.M.; Rehman, H.U.; Shinwari, M.F.; Abdelbaky, M.A. V2G Strategy for Primary Frequency Control of an Industrial Microgrid Considering the Charging Station Operator. Electronics 2020, 9, 549. [Google Scholar] [CrossRef]
- Wang, N.; Li, B.; Duan, Y.; Jia, S. A multi-energy scheduling strategy for orderly charging and discharging of electric vehicles based on multi-objective particle swarm optimization. Sustain. Energy Technol. Assess. 2021, 44, 101037. [Google Scholar] [CrossRef]
- Yin, W.; Qin, X.; Huang, Z. Optimal dispatching of large-scale electric vehicles into grid based on improved second-order cone. Energy 2022, 254, 124346. [Google Scholar] [CrossRef]
- Wang, R.; Mu, J.; Sun, Z.; Wang, J.; Hu, A. NSGA-II multi-objective optimization regional electricity price model for electric vehicle charging based on travel law. Energy Rep. 2021, 7, 1495–1503. [Google Scholar] [CrossRef]
- Yin, W.-J.; Ming, Z.-F. Electric vehicle charging and discharging scheduling strategy based on local search and competitive learning particle swarm optimization algorithm. J. Energy Storage 2021, 42, 102966. [Google Scholar] [CrossRef]
- Yang, X.; Niu, D.; Sun, L.; Ji, Z.; Zhou, J.; Wang, K.; Siqin, Z. A bi-level optimization model for electric vehicle charging strategy based on regional grid load following. J. Clean. Prod. 2021, 325, 129313. [Google Scholar] [CrossRef]
- Yan, Q.; Lin, H.; Li, J.; Ai, X.; Shi, M.; Zhang, M.; Gejirifu, D. Many-objective charging optimization for electric vehicles considering demand response and multi-uncertainties based on Markov chain and information gap decision theory. Sustain. Cities Soc. 2022, 78, 103652. [Google Scholar] [CrossRef]
- Diaz-Cachinero, P.; Muñoz-Hernandez, J.I.; Contreras, J. Integrated operational planning model, considering optimal delivery routing, incentives and electric vehicle aggregated demand management. Appl. Energy 2021, 304, 117698. [Google Scholar] [CrossRef]
- Tao, Y.; Huang, M.; Chen, Y.; Yang, L. Orderly charging strategy of battery electric vehicle driven by real-world driving data. Energy 2020, 193, 116806. [Google Scholar] [CrossRef]
- Iqbal, S.; Habib, S.; Khan, N.H.; Ali, M.; Aurangzeb, M.; Ahmed, E.M. Electric Vehicles Aggregation for Frequency Control of Microgrid under Various Operation Conditions Using an Optimal Coordinated Strategy. Sustainability 2022, 14, 3108. [Google Scholar] [CrossRef]
- Aliasghari, P.; Mohammadi-Ivatloo, B.; Abapour, M.; Ahmadian, A.; Elkamel, A. Goal Programming Application for Contract Pricing of Electric Vehicle Aggregator in Join Day-Ahead Market. Energies 2020, 13, 1771. [Google Scholar] [CrossRef]
- Jiménez-Marín, A.; Pérez-Ruiz, J. A Robust Optimization Model to the Day-Ahead Operation of an Electric Vehicle Aggregator Providing Reliable Reserve. Energies 2021, 14, 7456. [Google Scholar] [CrossRef]
- Zou, M.; Yang, Y.; Liu, M.; Wang, W.; Jia, H.; Peng, X.; Su, S.; Liu, D. Optimization Model of Electric Vehicles Charging and Discharging Strategy Considering the Safe Operation of Distribution Network. World Electr. Veh. J. 2022, 13, 117. [Google Scholar] [CrossRef]
- Hasan, S.; Simsekoglu, Ö. The role of psychological factors on vehicle kilometer travelled (VKT) for battery electric vehicle (BEV) users. Res. Transp. Econ. 2020, 82, 100880. [Google Scholar] [CrossRef]
- Huang, J.; Wang, X.; Shao, C.; Song, Z.; Wang, Y.; Shuai, X. An Improved Charging Navigation Strategy of Electric Vehicles via Optimal Time-of-Use Pricing. Electr. Power Syst. Res. 2022, 210, 108077. [Google Scholar] [CrossRef]
- Lee, S.; Choi, D.-H. Dynamic pricing and energy management for profit maximization in multiple smart electric vehicle charging stations: A privacy-preserving deep reinforcement learning approach. Appl. Energy 2021, 304, 117754. [Google Scholar] [CrossRef]
- Jones, C.B.; Lave, M.; Vining, W.; Garcia, B.M. Uncontrolled Electric Vehicle Charging Impacts on Distribution Electric Power Systems with Primarily Residential, Commercial or Industrial Loads. Energies 2021, 14, 1688. [Google Scholar] [CrossRef]
- Gao, H.; Yang, L.; Duan, H. The Local Ordered Charging Strategy of Electric Vehicles Based on Energy Routers under Three-Phase Balance of Residential Fields. Appl. Sci. 2021, 12, 63. [Google Scholar] [CrossRef]
- Ge, X.; Shi, L.; Fu, Y.; Muyeen, S.M.; Zhang, Z.; He, H. Data-driven spatial-temporal prediction of electric vehicle load profile considering charging behavior. Electr. Power Syst. Res. 2020, 187, 106469. [Google Scholar] [CrossRef]
- Yang, X.; Zhuge, C.; Shao, C.; Huang, Y.; Tang, J.H.C.G.; Sun, M.; Wang, P.; Wang, S. Characterizing mobility patterns of private electric vehicle users with trajectory data. Appl. Energy 2022, 321, 119417. [Google Scholar] [CrossRef]
- Xu, X.; Niu, D.; Li, Y.; Sun, L. Optimal Pricing Strategy of Electric Vehicle Charging Station for Promoting Green Behavior Based on Time and Space Dimensions. J. Adv. Transp. 2020, 2020, 8890233. [Google Scholar] [CrossRef]
- Rashidizadeh-Kermani, H.; Najafi, H.; Anvari-Moghaddam, A.; Guerrero, J. Optimal Decision-Making Strategy of an Electric Vehicle Aggregator in Short-Term Electricity Markets. Energies 2018, 11, 2413. [Google Scholar] [CrossRef]
- Gomes, I.; Melicio, R.; Mendes, V. Comparison between Inflexible and Flexible Charging of Electric Vehicles—A Study from the Perspective of an Aggregator. Energies 2020, 13, 5443. [Google Scholar] [CrossRef]
- Goh, H.H.; Zong, L.; Zhang, D.; Dai, W.; Lim, C.S.; Kurniawan, T.A.; Goh, K.C. Orderly Charging Strategy Based on Optimal Time of Use Price Demand Response of Electric Vehicles in Distribution Network. Energies 2022, 15, 1869. [Google Scholar] [CrossRef]
- Li, J.; Xing, Y.; Zhang, D. Planning Method and Principles of the Cloud Energy Storage Applied in the Power Grid Based on Charging and Discharging Load Model for Distributed Energy Storage Devices. Processes 2022, 10, 194. [Google Scholar] [CrossRef]
- Zeng, B.; Luo, Y.; Zhang, C.; Liu, Y. Assessing the Impact of an EV Battery Swapping Station on the Reliability of Distribution Systems. Appl. Sci. 2020, 10, 8023. [Google Scholar] [CrossRef]
- Jiao, Z.; Yin, Y.; Ran, L.; Gao, Z. Integrating vehicle-to-grid contract design with power dispatching optimisation: Managerial insights, and carbon footprints mitigation. Int. J. Prod. Res. 2021, 60, 5354–5379. [Google Scholar]
- Zhou, C.-B.; Qi, S.-Z.; Zhang, J.-H.; Tang, S.-Y. Potential Co-benefit effect analysis of orderly charging and discharging of electric vehicles in China. Energy 2021, 226, 120352. [Google Scholar] [CrossRef]
- Liu, K.; Gao, H.; Liang, Z.; Zhao, M.; Li, C. Optimal charging strategy for large-scale electric buses considering resource constraints. Transp. Res. Part D: Transp. Environ. 2021, 99, 103009. [Google Scholar] [CrossRef]
- Hou, H.; Wang, Y.; Chen, Y.; Zhao, B.; Zhang, L.; Xie, C. Long-time scale vehicle-to-grid scheduling strategy considering psychological effect based on Weber-Fechner law. Int. J. Electr. Power Energy Syst. 2021, 136, 107709. [Google Scholar] [CrossRef]
- Mei, Y.; Li, B.; Wang, H.; Wang, X.; Negnevitsky, M. Multi-objective optimal scheduling of microgrid with electric vehicles. Energy Rep. 2022, 8, 4512–4524. [Google Scholar] [CrossRef]
- Zhong, J.; Xiong, X.; Jiang, Y.-Z. An Orderly EV Charging Scheduling Method Based on Deep Learning in Cloud-Edge Collaborative Environment. Adv. Civ. Eng. 2021, 2021, 6690610. [Google Scholar] [CrossRef]
- Lemeski, A.T.; Ebrahimi, R.; Zakariazadeh, A. Optimal decentralized coordinated operation of electric vehicle aggregators enabling vehicle to grid option using distributed algorithm. J. Energy Storage 2022, 54, 105213. [Google Scholar] [CrossRef]
- Hussain, S.; Thakur, S.; Shukla, S.; Breslin, J.G.; Jan, Q.; Khan, F.; Kim, Y.-S. A two-layer decentralized charging approach for residential electric vehicles based on fuzzy data fusion. J. King Saud Univ.-Comput. Inf. Sci. 2022, 34, 7391–7405. [Google Scholar] [CrossRef]
- Zhou, K.; Cheng, L.; Wen, L.; Lu, X.; Ding, T. A coordinated charging scheduling method for electric vehicles considering different charging demands. Energy 2020, 213, 118882. [Google Scholar] [CrossRef]
- Xu, S.; Yan, Z.; Feng, D.; Zhao, X. Decentralized charging control strategy of the electric vehicle aggregator based on augmented Lagrangian method. Int. J. Electr. Power Energy Syst. 2019, 104, 673–679. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time Period | Grid Electricity Sales Prices (kW·h) | Service Charging Tariff (kW·h) |
|---|---|---|
| 00:00–08:00 | 0.365 | 1 |
| 08:00–12:00 | 0.869 | 1 |
| 12:00–14:30 | 0.687 | 1 |
| 14:30–17:00 | 0.687 | 1 |
| 17:00–21:00 | 0.869 | 1 |
| 21:00–24:00 | 0.687 | 1 |
| Number of Vehicles | Benefits/Yuan | ||
|---|---|---|---|
| Disorderly Charging | Centralized and Optimized Charging | Dispersion Optimization Charging Based on Lagrange Relaxation Method | |
| 100 | 405.2 | 865.6 | 1122.9 |
| 200 | 980.6 | 1630 | 2424.9 |
| Number of Vehicles | Calculation Time/s | |
|---|---|---|
| Centralized and Optimized Charging | Dispersion Optimization Charging Based on Lagrange Relaxation Method | |
| 100 | 50.262 | 14.021 |
| 200 | 103.624 | 27.312 |
| Algorithm Type | Calculation Time/s |
|---|---|
| Lagrange relaxation method | 38.26 |
| Traditional multi-objective genetic algorithm | 51.07 |
| Modified multi-objective genetic algorithm | 59.42 |
| Alternating direction multiplier method | 112.17 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cai, L.; Zhang, Q.; Dai, N.; Xu, Q.; Gao, L.; Shang, B.; Xiang, L.; Chen, H. Optimization of Control Strategy for Orderly Charging of Electric Vehicles in Mountainous Cities. World Electr. Veh. J. 2022, 13, 195. https://doi.org/10.3390/wevj13100195
Cai L, Zhang Q, Dai N, Xu Q, Gao L, Shang B, Xiang L, Chen H. Optimization of Control Strategy for Orderly Charging of Electric Vehicles in Mountainous Cities. World Electric Vehicle Journal. 2022; 13(10):195. https://doi.org/10.3390/wevj13100195
Chicago/Turabian StyleCai, Li, Quanwen Zhang, Nina Dai, Qingshan Xu, Le Gao, Bingjie Shang, Lihong Xiang, and Hao Chen. 2022. "Optimization of Control Strategy for Orderly Charging of Electric Vehicles in Mountainous Cities" World Electric Vehicle Journal 13, no. 10: 195. https://doi.org/10.3390/wevj13100195
APA StyleCai, L., Zhang, Q., Dai, N., Xu, Q., Gao, L., Shang, B., Xiang, L., & Chen, H. (2022). Optimization of Control Strategy for Orderly Charging of Electric Vehicles in Mountainous Cities. World Electric Vehicle Journal, 13(10), 195. https://doi.org/10.3390/wevj13100195