
A Lane Level Bi-Directional Hybrid Path Planning Method Based on High Definition Map



Abstract
:1. Introduction
2. Driving Cost Model Based on Lane-Level Maps
2.1. Lane-Level Network Structure
2.2. Traffic Cost Model Based on Lane-Level Maps
2.2.1. The Travel Time Cost of the Path
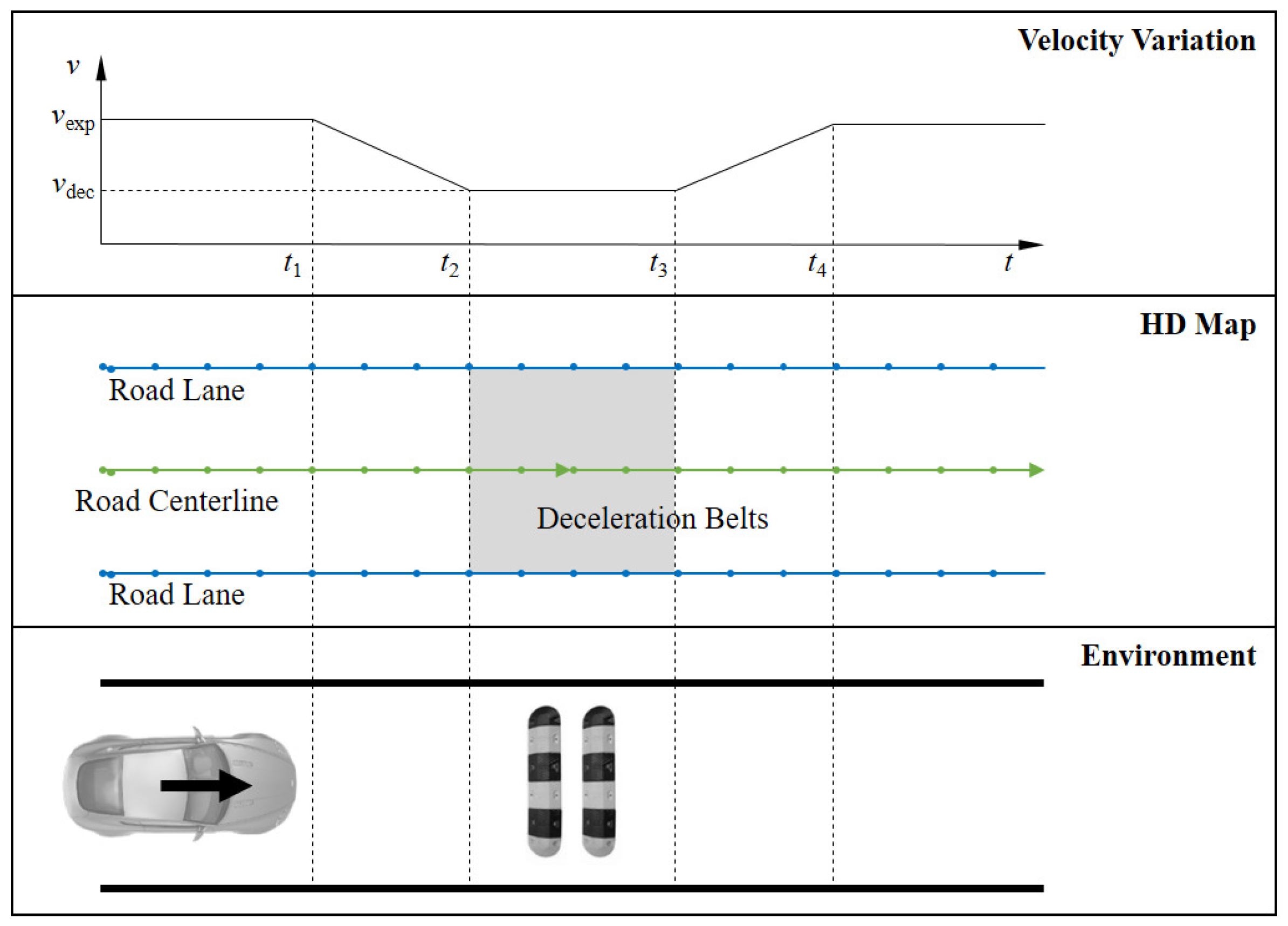
2.2.2. Time Cost Increases Generated by Transportation Facilities
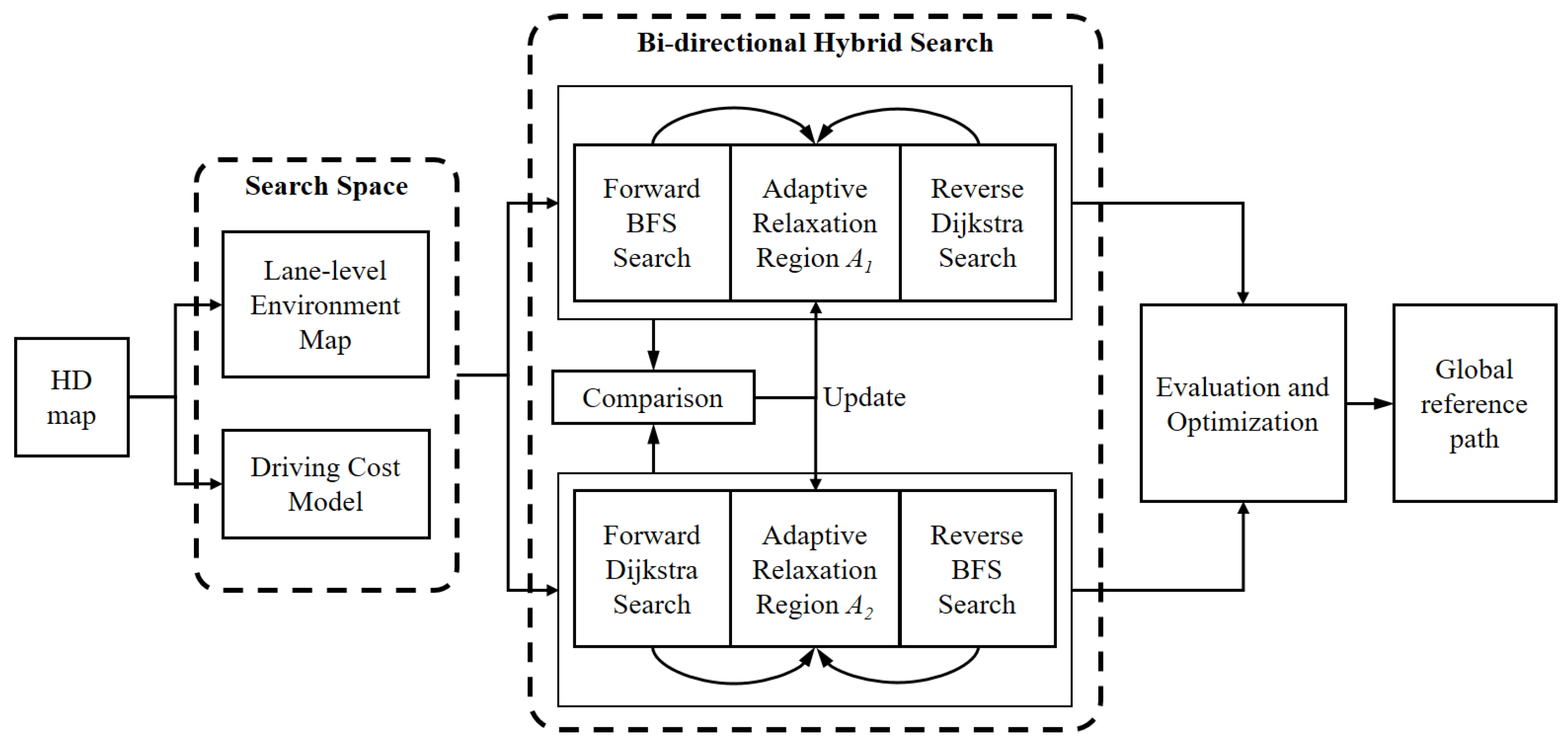
3. BHPS Algorithm Based on HD Maps
3.1. Bidirectional Hybrid Search in Search Space
3.1.1. BFS Search Process
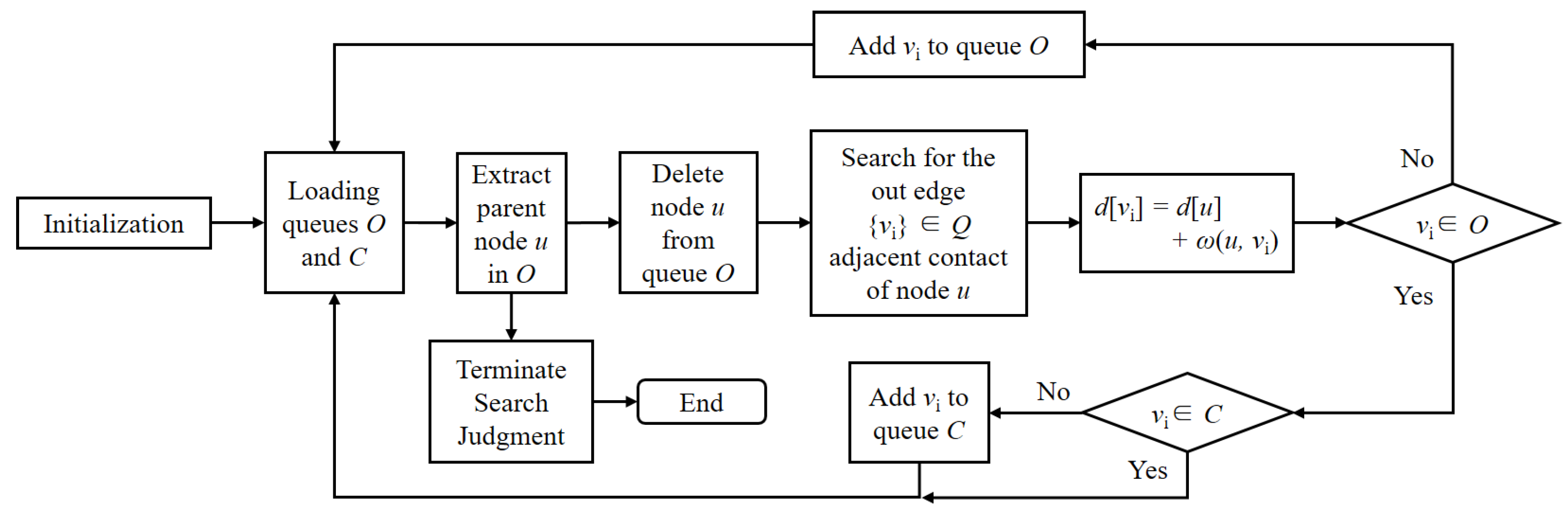
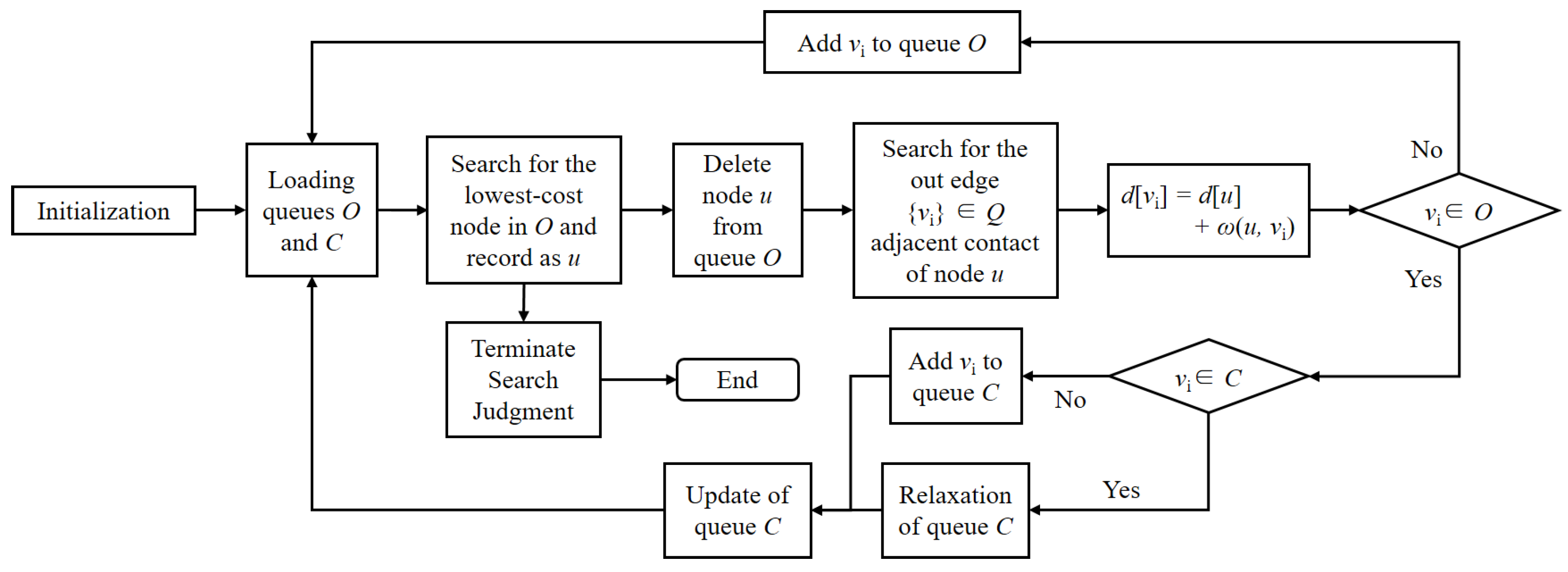
3.1.2. Dijkstra Search Process
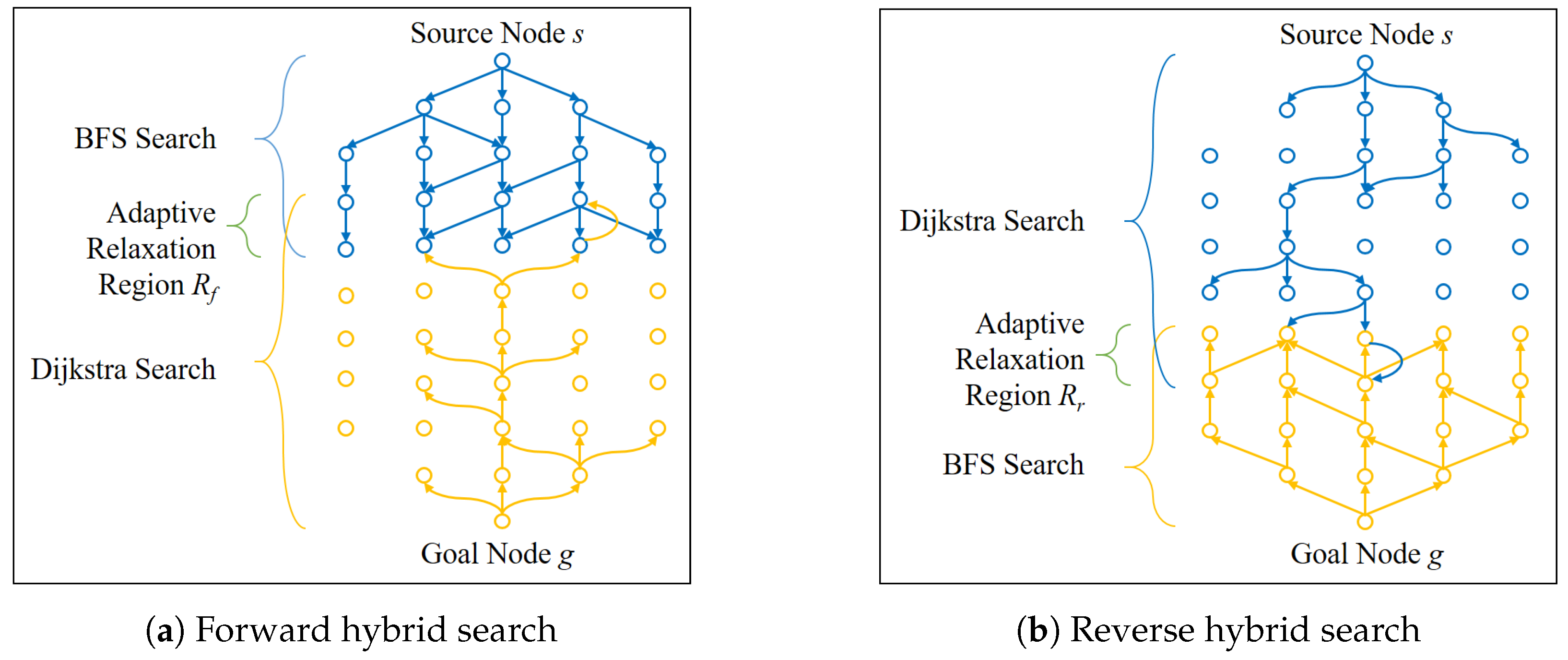
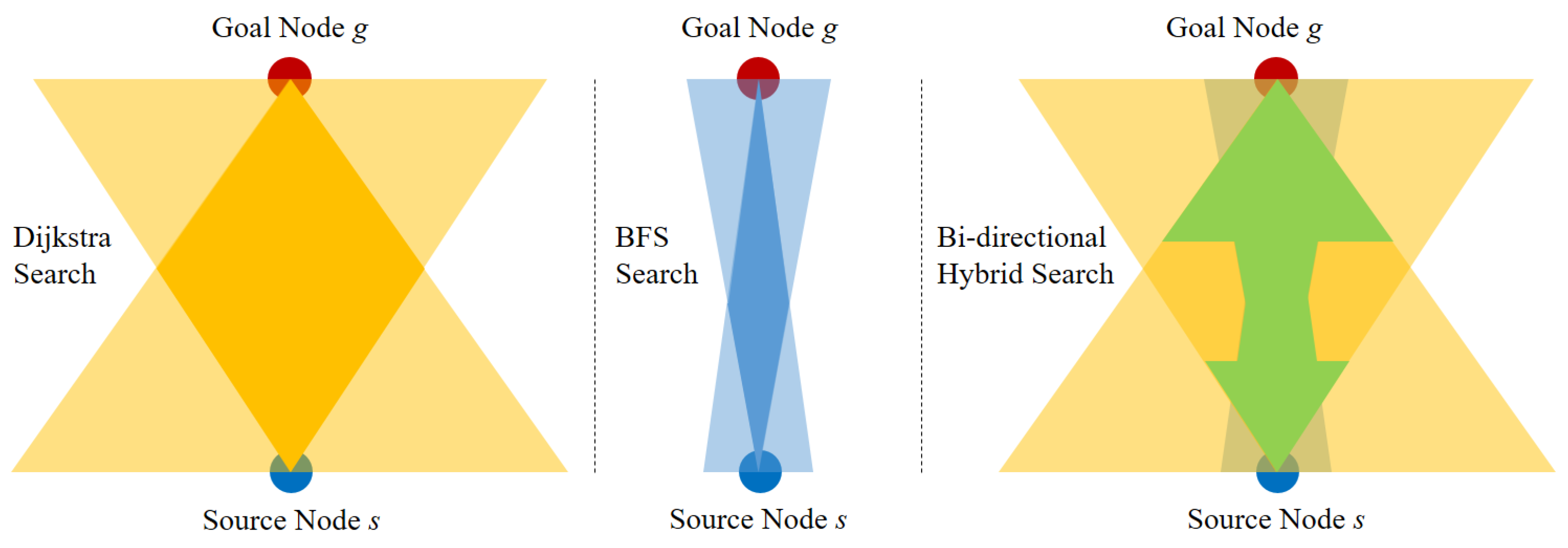
3.1.3. Bidirectional Hybrid Search Process
- (i)
- Dijkstra search space and Dijkstra path from the source node s to the relaxation region and from the goal node g to the relaxation region ;
- (ii)
- The BFS space near the source node s and the goal node g;
- (iii)
- Local Dijkstra search results between the relaxation regions and .
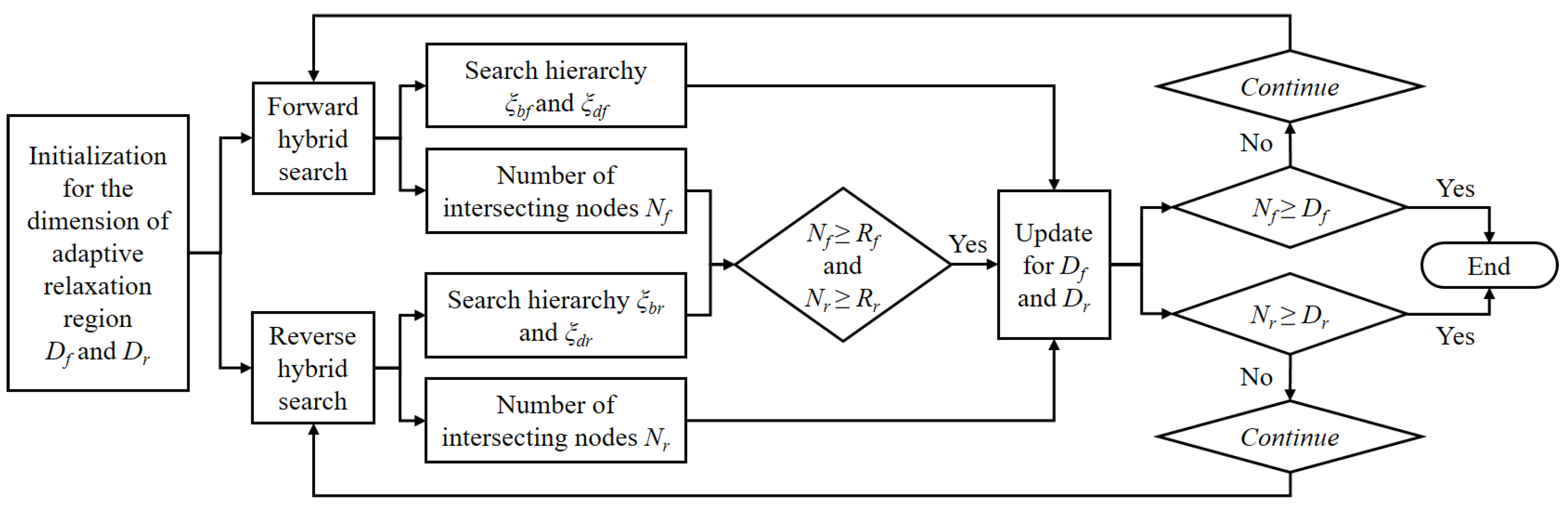
3.2. Design and Update of Relaxation Regions
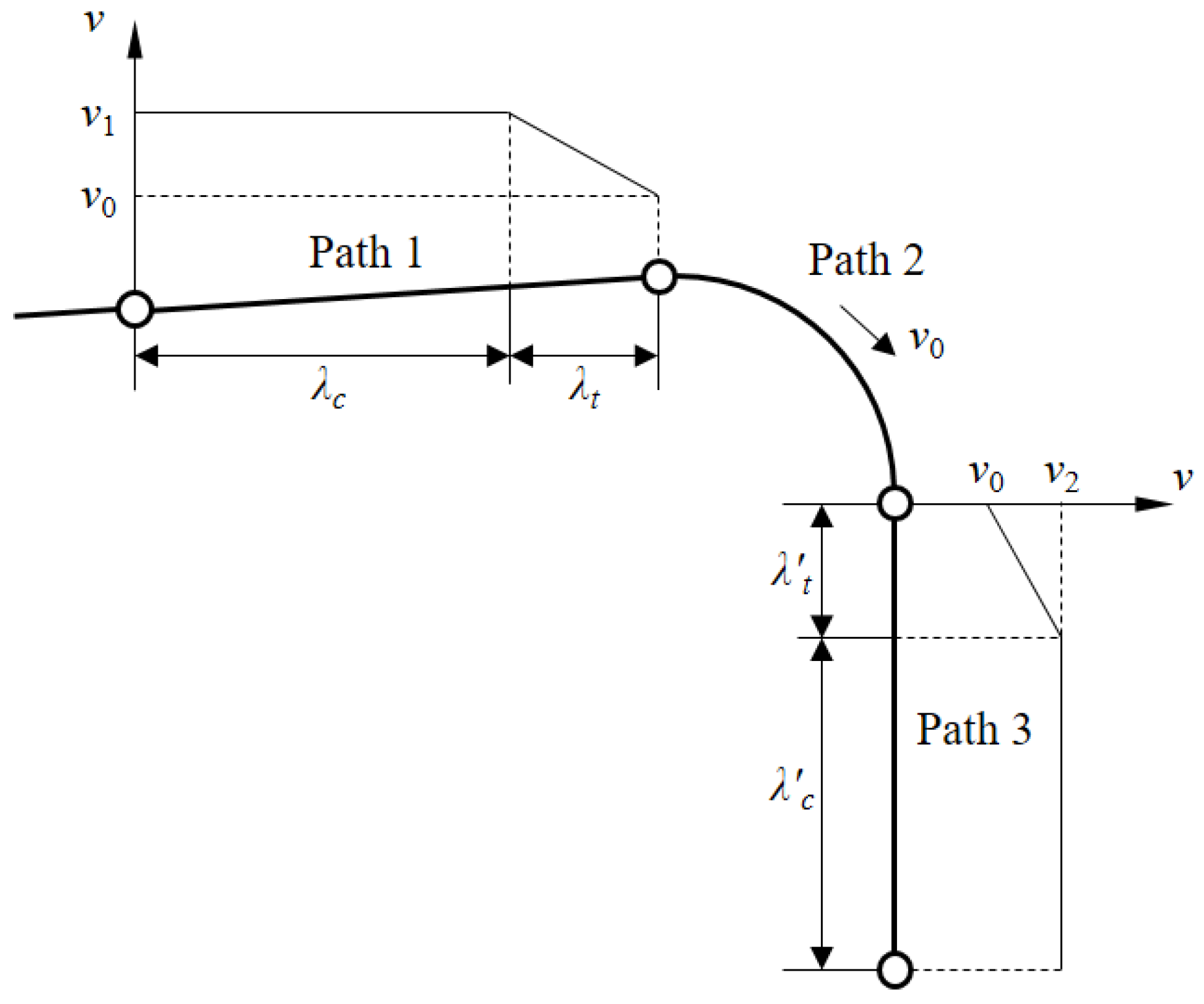
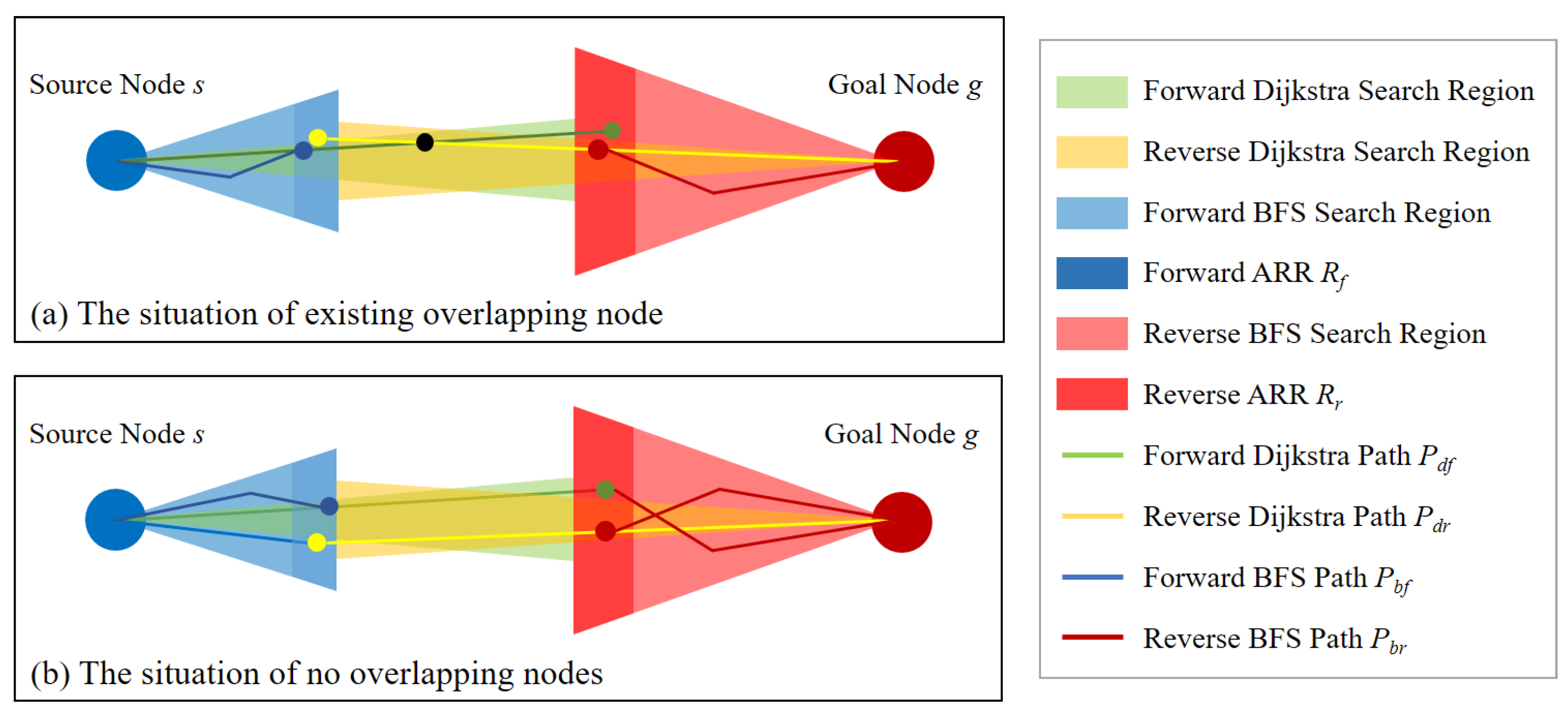
4. Global Path Optimization
- (i)
- The forward Dijkstra search and reverse Dijkstra search have overlapping vertices outside the BFS search scope;
- (ii)
- The forward Dijkstra search and reverse Dijkstra search have no overlapping vertices outside the BFS search scope;
4.1. Existing Overlapping Nodes
4.2. With No Overlapping Nodes
5. Simulation Test and Analysis of Results
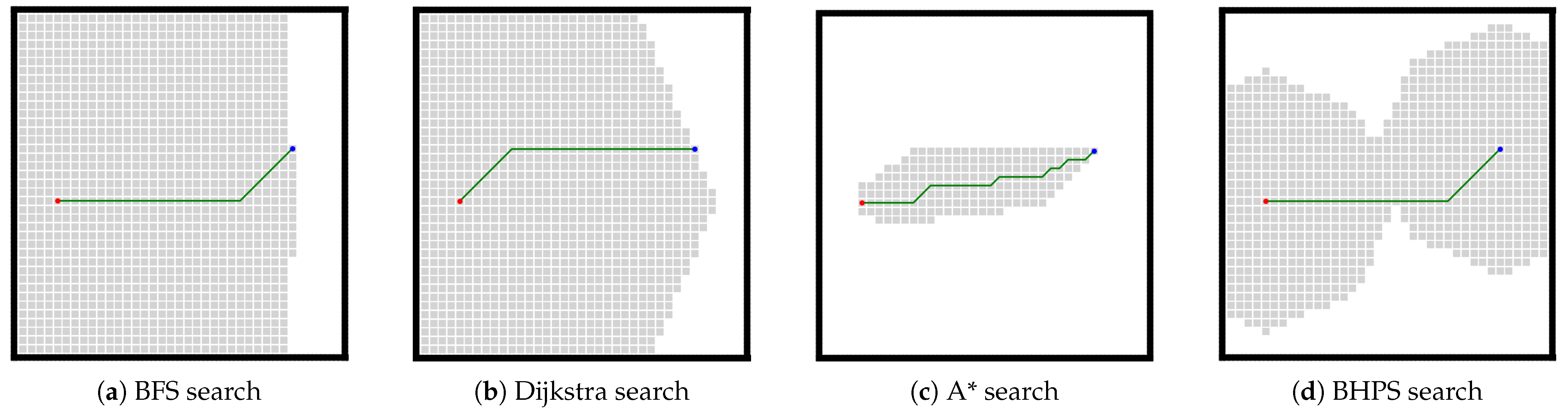
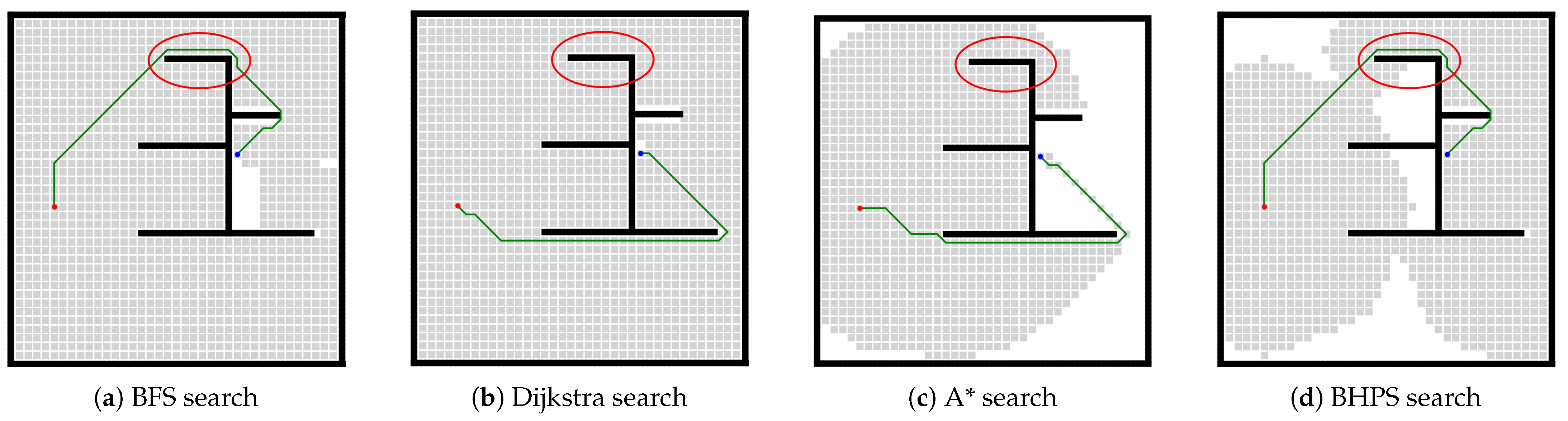
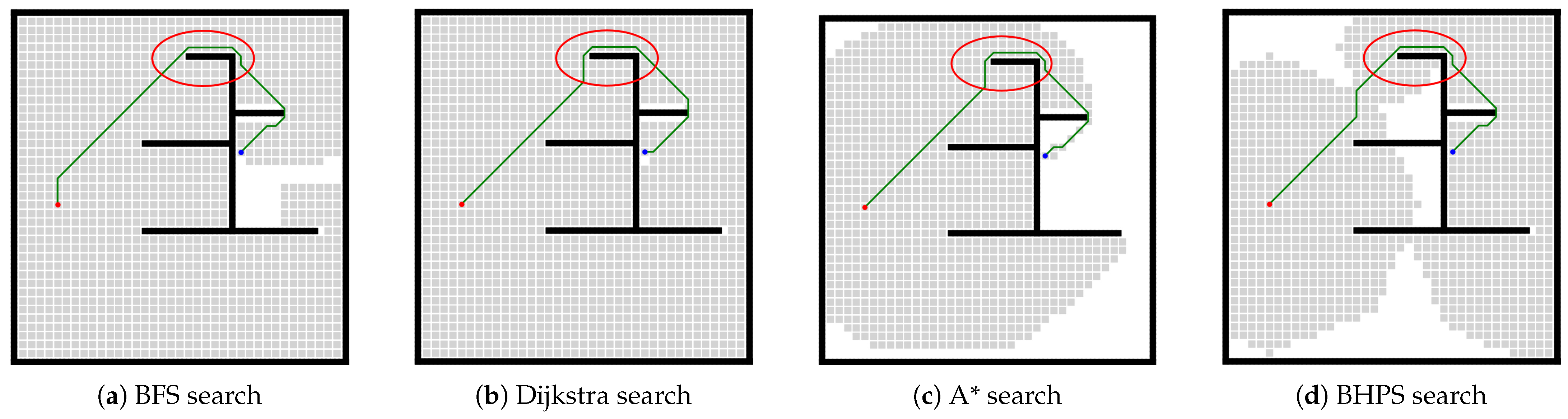
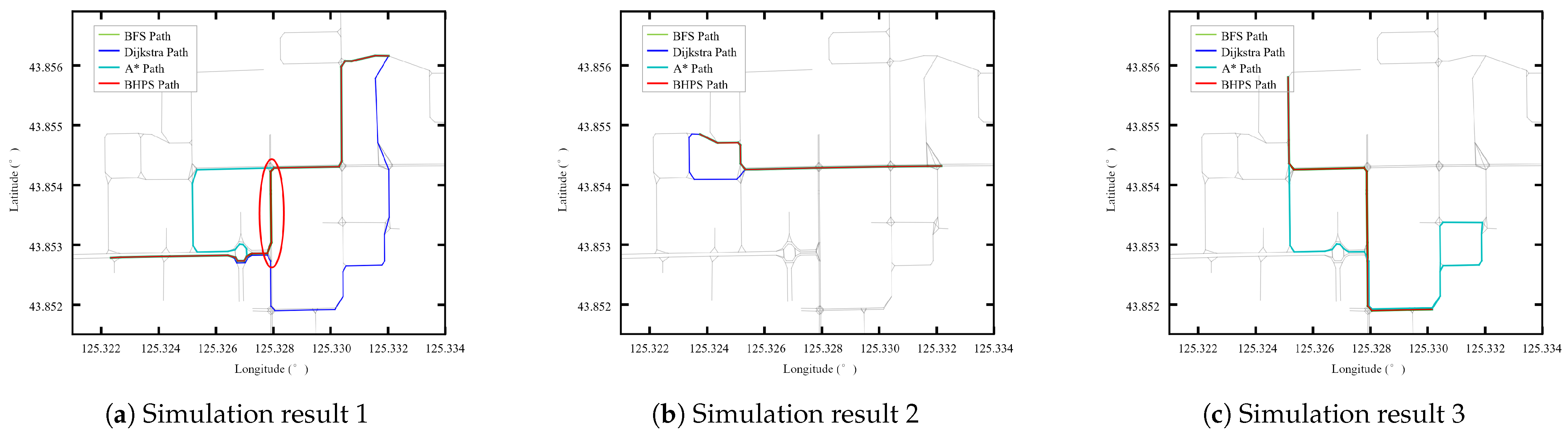
5.1. Verification of Path Search Algorithm
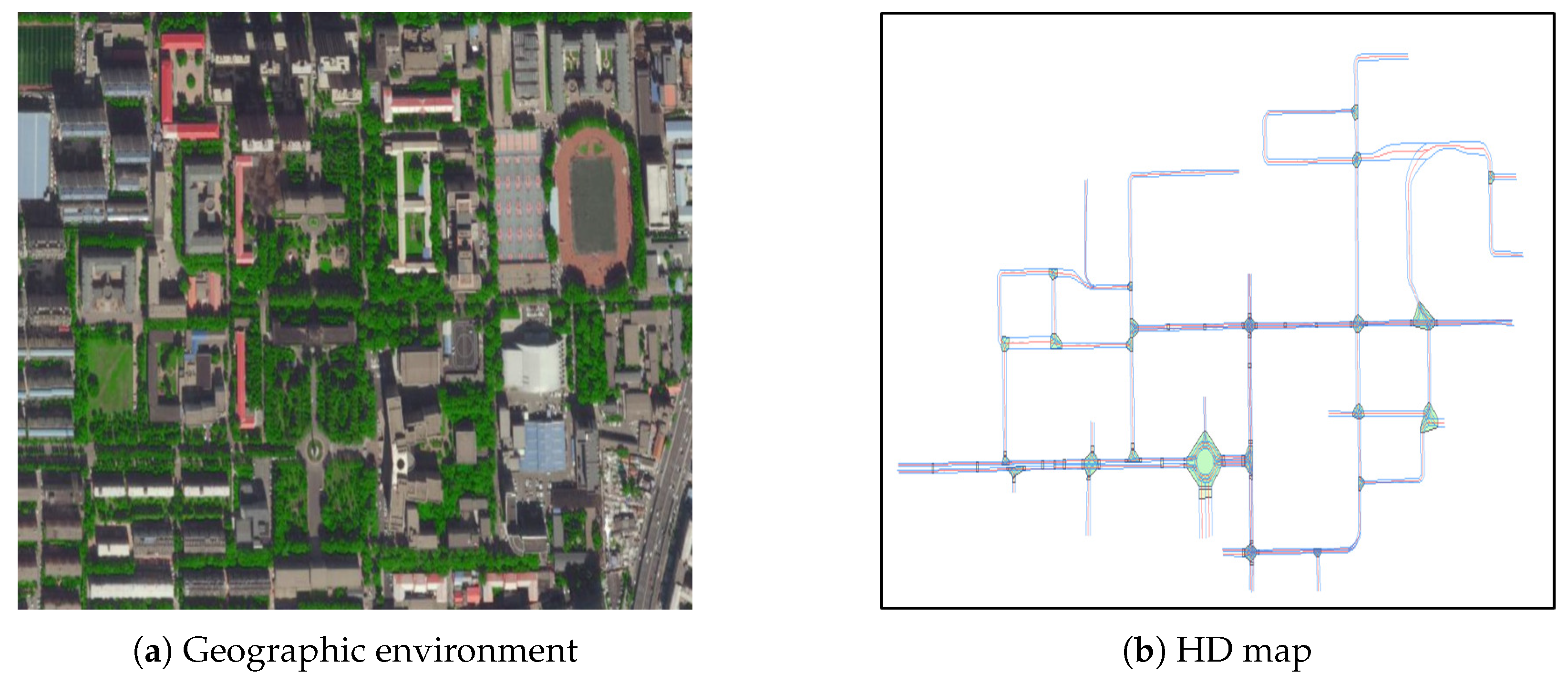
5.2. Simulation Test Based on HD Maps
6. Conclusions
- 1
- This paper establishes a model of vehicle travel time costs based on lane-level maps and abundant road network information provided by HD maps;
- 2
- The proposed algorithm uses incomplete bidirectional breadth-first search and bidirectional Dijkstra search to find the shortest path in the HD map. The algorithm not only has the high efficiency of the Dijkstra algorithm and the global optimization properties of BFS, but also greatly reduces the computational cost of the path search algorithm;
- 3
- In this paper, the self-adaption relaxation space concept is proposed, which realizes the dynamic adjustment of the search space of the proposed algorithm. This algorithm can reduce the computational load according to the demand to satisfy the computational capacity of different computing requirements.
Author Contributions
Funding
Conflicts of Interest
References
- Skog, I. In-car positioning and navigation technologies: A survey. IEEE Press. 2009, 10, 4–21. [Google Scholar] [CrossRef]
- Wei, J.; Snider, J.M.; Gu, T.; Dolan, J.M.; Litkouhi, B. A behavioral planning framework for autonomous driving. In Proceedings of the 2014 IEEE Intelligent Vehicle Symposium, Dearborn, MI, USA, 8–11 June 2014. [Google Scholar]
- Chu, H.Q.; Guo, L.L.; Gao, B.Z. Predictive Cruise Control Using High-Definition Map and Real Vehicle Implementation. IEEE Intell. Transp. Veh. Technol. 2018, 67, 11377–11389. [Google Scholar] [CrossRef]
- Liu, R.; Wang, J.L.; Zhang, B.Q. High definition map for automated driving: Overview and analysis. J. Navig. 2020, 73, 324–341. [Google Scholar] [CrossRef]
- Joshi, A.; James, M.R. Generation of accurate lane-level maps from coarse prior maps and LiDAR. IEEE Intell. Transp. Syst. Mag. 2015, 7, 19–29. [Google Scholar] [CrossRef]
- Liu, J.N.; Zhan, J.; Guo, C.; Ying, L.I.; Wu, H.; Huang, H. Data logic structure and key technologies on intelligent high-precision map. Acta Geod. Cartogr. Sin. 2019, 48, 939–953. [Google Scholar]
- Guo, C.; Meguro, J.I.; Kojima, Y.; Naito, T. Automatic lane-level map generation for advanced driver assistance systems using low-cost sensors. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation, Hong Kong, China, 31 May–7 June 2014. [Google Scholar]
- Jiang, K.; Yang, D.; Liu, C.; Zhang, T.; Xiao, Z. A flexible multilayer map model designed for lane-level route planning in autono-mous vehicles. Engineering 2019, 5, 266–295. [Google Scholar] [CrossRef]
- Li, Z.W. Research on Lane Keeping Control in Park Supported by High Definition Map; Jilin University: Chngchun, China, 2019. [Google Scholar]
- González, D.; Pérez, J.; Milanés, V.; Nashashibi, F. A review of motion planning techniques for automated vehicles. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1135–1145. [Google Scholar] [CrossRef]
- Guo, S.L.; Duan, J.; Zhu, Y.; Li, X.C.; Chen, T.W. Improved Dijkstra Algorithm Based on Fibonacci Heap for Solving the Shortest Path Problem with Specified Nodes. In Proceedings of the International Conference on Computer Science and Artificial Intelligence, Jakarta, Indonesia, 5–7 December 2017; pp. 52–61. [Google Scholar]
- Xu, Z.; Liu, X.; Chen, Q. Application of Improved Astar Algorithm in Global Path Planning of Unmanned Vehicles. In Proceedings of the 2019 Chinese Automation Congress, Hangzhou, China, 25 November 2019. [Google Scholar]
- Yang, B.; Ding, Z.; Yuan, L.; Yan, J.; Guo, L.; Cai, Z. A Novel Urban Emergency Path Planning Method Based on Vector Grid Map. IEEE Access 2020, 8, 154338–154353. [Google Scholar] [CrossRef]
- Hu, X.; Jiang, Z.; Xu, C. Vehicle Path Planning Fusion Algorithm Based on Road Network. In Proceedings of the 2020 IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference, Chongqing, China, 12–14 June 2020; pp. 98–102. [Google Scholar]
- Liu, H.; Jin, C.; Yang, B.; Zhou, A. Finding Top-k Shortest Paths with Diversity. IEEE Trans. Knowl. Data Eng. 2018, 30, 488–502. [Google Scholar] [CrossRef]
- Liu, H.; Jin, C.; Zhou, A. Popular route planning with travel cost estimation from trajectories. Front. Comput. Sci. 2020, 14, 191–207. [Google Scholar] [CrossRef]
- Yuan, L.; Yang, B.; Chi, Y.; Liu, Z.; Guo, L. Vehicle Emergency Route Planning Based on Grid Map. In Proceedings of the International Conference on Spatial Data and Intelligence, Virtual Event, 8–9 May 2020; pp. 122–135. [Google Scholar]
- Broumi, S.; Bakal, A.; Talea, M.; Smarandache, F.; Vladareanu, L. Applying Dijkstra Algorithm for Solving Neutrosophic Shortest Path Problem. In Proceedings of the 2016 International Conference on Advanced Mechatronic Systems, Melbourne, Australia, 30 November–3 December 2016; pp. 412–416. [Google Scholar]
- OpenDRIVE: Concept Document. Association for Standardisation of Automation and Measuring Systems; 14.01.2020; ASAM: Hoehenkirchen, Germany, 2020. [Google Scholar]
- Liu, C. Mission Planning and Trajectory Generation for Intelligent Vehicles Based on Lane-Level Map; Tsinghua University: Beijing, China, 2017. [Google Scholar]
- Jonker, R.; Volgenant, A. A shortest augmenting path algorithm for dense and sparse linear assignment problems. Computing 1987, 38, 325–340. [Google Scholar] [CrossRef]
- Cormen, T.H.; Leiserson, C.E.; Rivest, R.L.; Stein, C. Introduction to Algorithms, 3rd ed.; The MIT Press: London, UK, 2009. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dijkstra Algorithm | BFS Algorithm | A* Algorithm | BHPS Algorithm | |
|---|---|---|---|---|
| Search scope dimension | 102 | 171 | 38 | 143 |
| Number of traffic facilities | 12 | 16 | 19 | 16 |
| Length of the path (m) | 672.8 | 562.6 | 878.3 | 562.6 |
| Travel time cost (s) | 89.0285 | 79.5503 | 137.4714 | 79.5503 |
| Search Time (s) | 0.3022 | 0.5633 | 0.1303 | 0.4351 |
| Dijkstra Algorithm | BFS Algorithm | A* Algorithm | BHPS Algorithm | |
|---|---|---|---|---|
| Search scope dimension | 95 | 171 | 22 | 129 |
| Number of traffic facilities | 9 | 9 | 9 | 9 |
| Length of the path (m) | 404.5 | 355.7 | 355.7 | 355.7 |
| Travel time cost (s) | 61.89 | 55.438 | 55.438 | 55.438 |
| Search Time (s) | 0.2539 | 0.4761 | 0.078 | 0.3624 |
| Dijkstra Algorithm | BFS Algorithm | A* Algorithm | BHPS Algorithm | |
|---|---|---|---|---|
| Search scope dimension | 103 | 158 | 53 | 122 |
| Number of traffic facilities | 9 | 9 | 9 | 9 |
| Length of the path (m) | 814.8 | 814.8 | 1314.6 | 814.8 |
| Travel time cost (s) | 121.06 | 121.06 | 192.48 | 121.06 |
| Search Time (s) | 0.3283 | 0.4573 | 0.1677 | 0.3561 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, B.; Song, X.; Gao, Z. A Lane Level Bi-Directional Hybrid Path Planning Method Based on High Definition Map. World Electr. Veh. J. 2021, 12, 227. https://doi.org/10.3390/wevj12040227
Yang B, Song X, Gao Z. A Lane Level Bi-Directional Hybrid Path Planning Method Based on High Definition Map. World Electric Vehicle Journal. 2021; 12(4):227. https://doi.org/10.3390/wevj12040227
Chicago/Turabian StyleYang, Bin, Xuewei Song, and Zhenhai Gao. 2021. "A Lane Level Bi-Directional Hybrid Path Planning Method Based on High Definition Map" World Electric Vehicle Journal 12, no. 4: 227. https://doi.org/10.3390/wevj12040227
APA StyleYang, B., Song, X., & Gao, Z. (2021). A Lane Level Bi-Directional Hybrid Path Planning Method Based on High Definition Map. World Electric Vehicle Journal, 12(4), 227. https://doi.org/10.3390/wevj12040227