
Research on Establishment of Vehicle Energy Distribution Model and Energy Consumption Optimization Based on Electric Hybrid System

Abstract
:1. Introduction
2. Powertrain Layout and Powertrain Operation Features of Electric Hybrid System
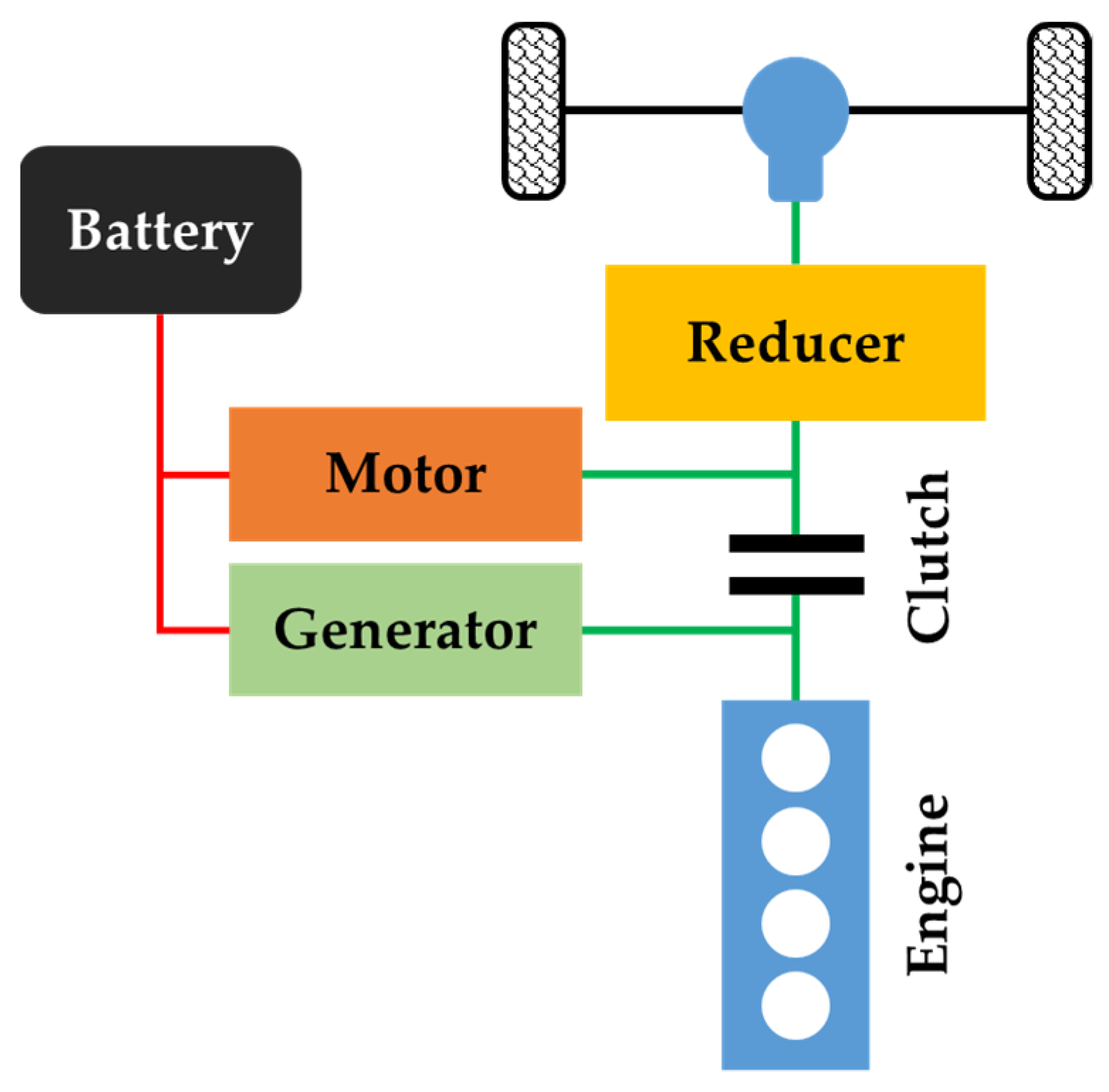
2.1. Powertrain Layout of Electric Hybrid System
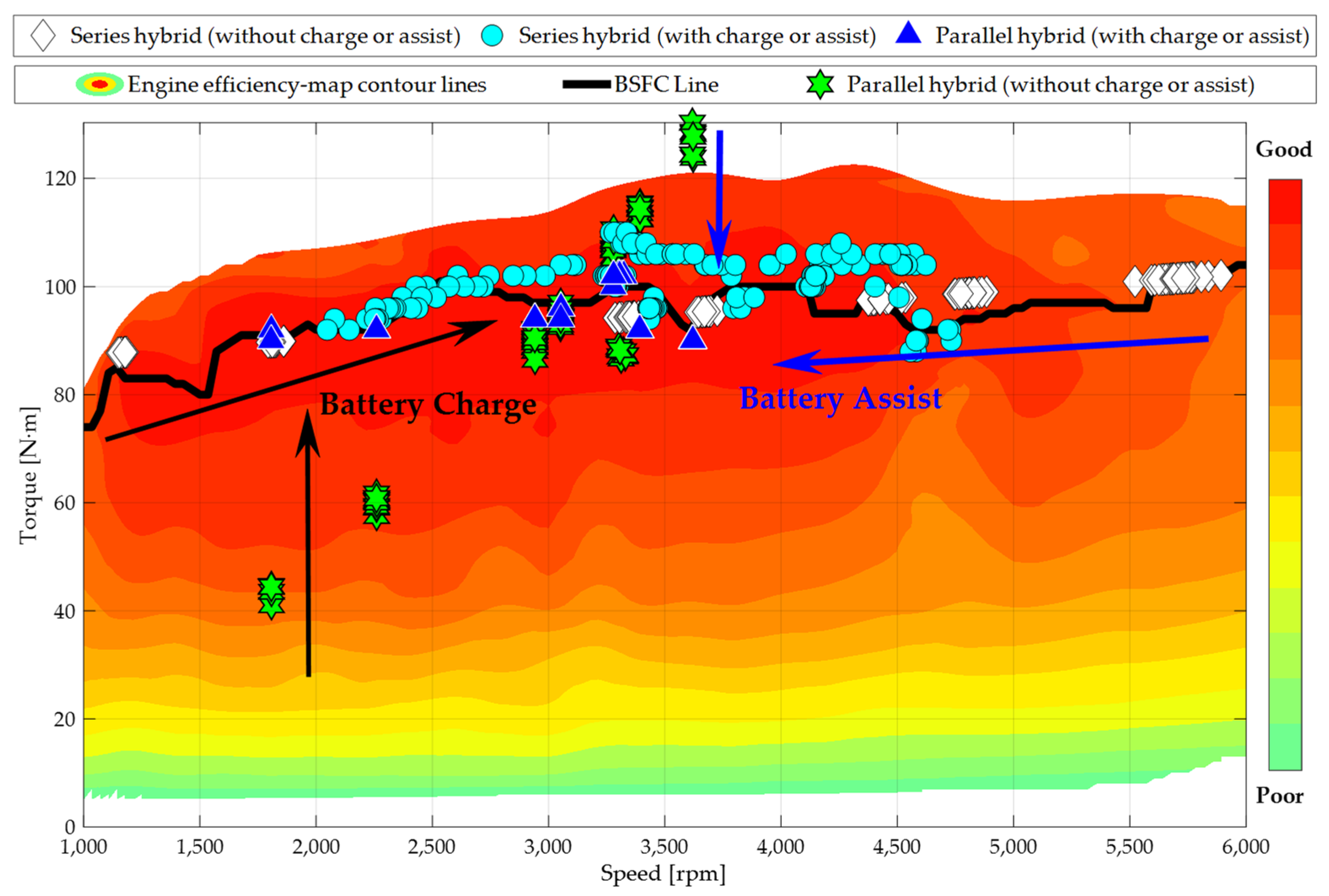
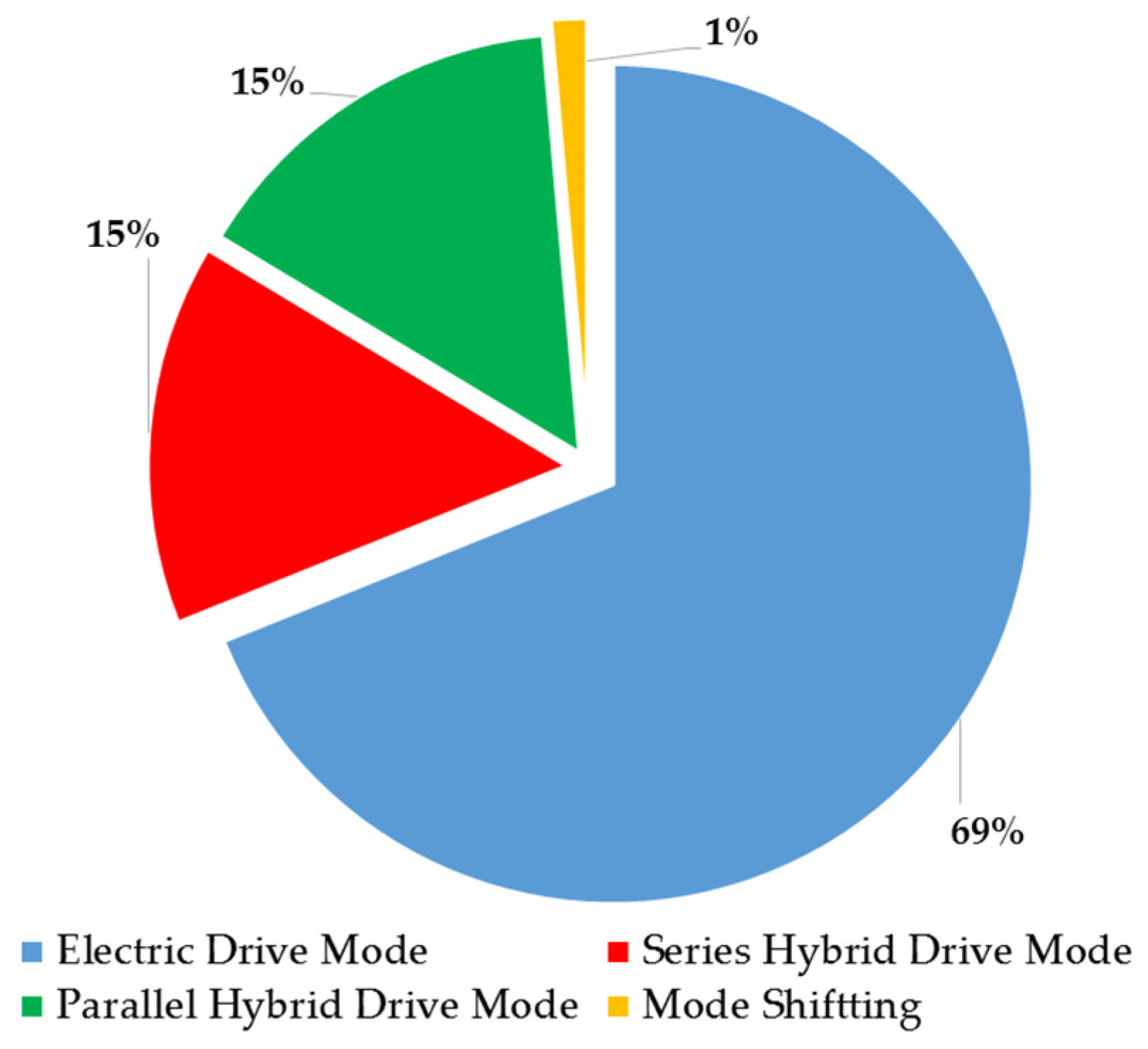
2.2. Powertrain Operation Features of Electric Hybrid System
3. Vehicle Energy Distribution Model
3.1. Energy Distribution Model
3.1.1. The Longitudinal Dynamic Model
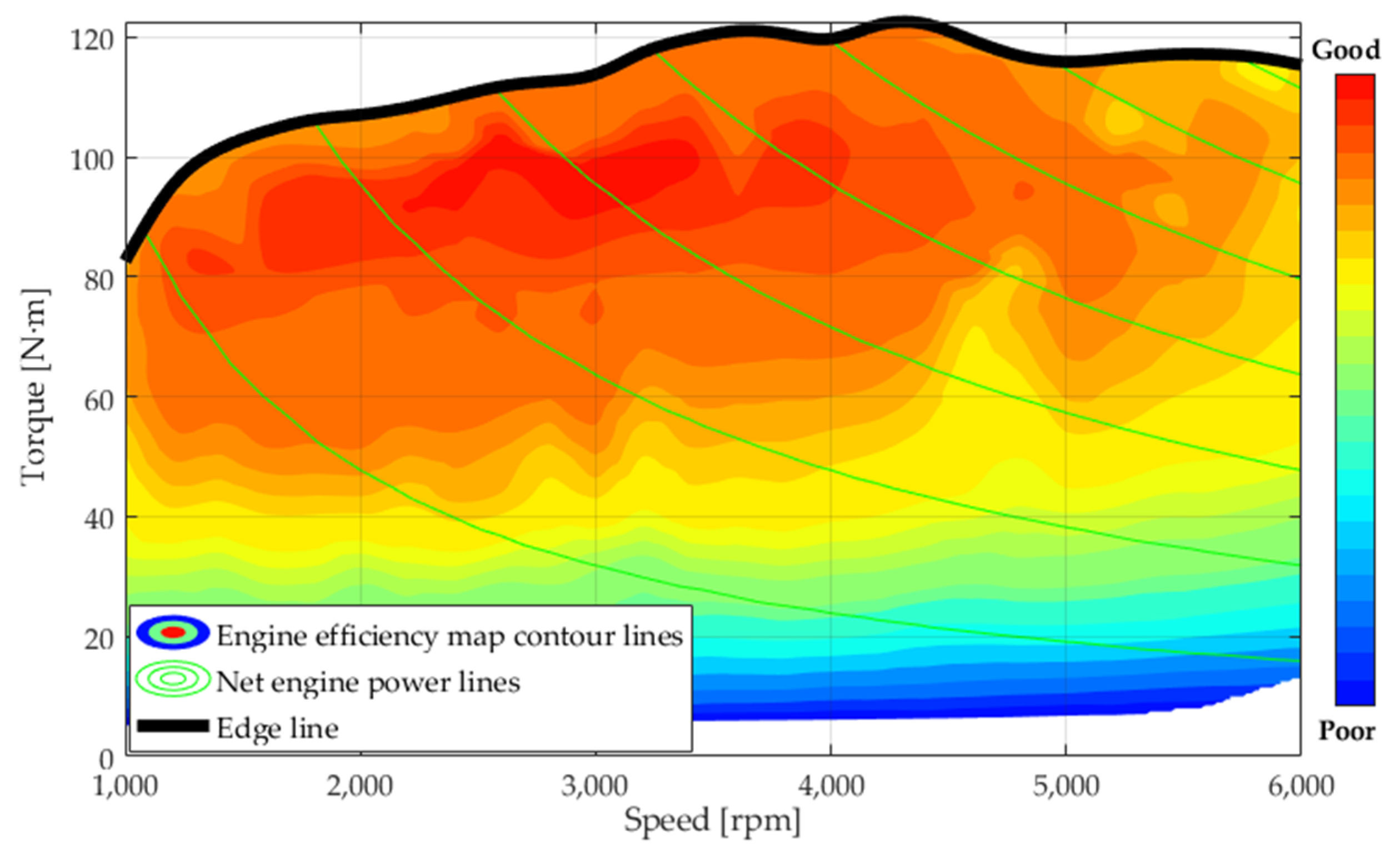
3.1.2. Engine Model
3.1.3. Electric Drive Model
3.1.4. Battery Model
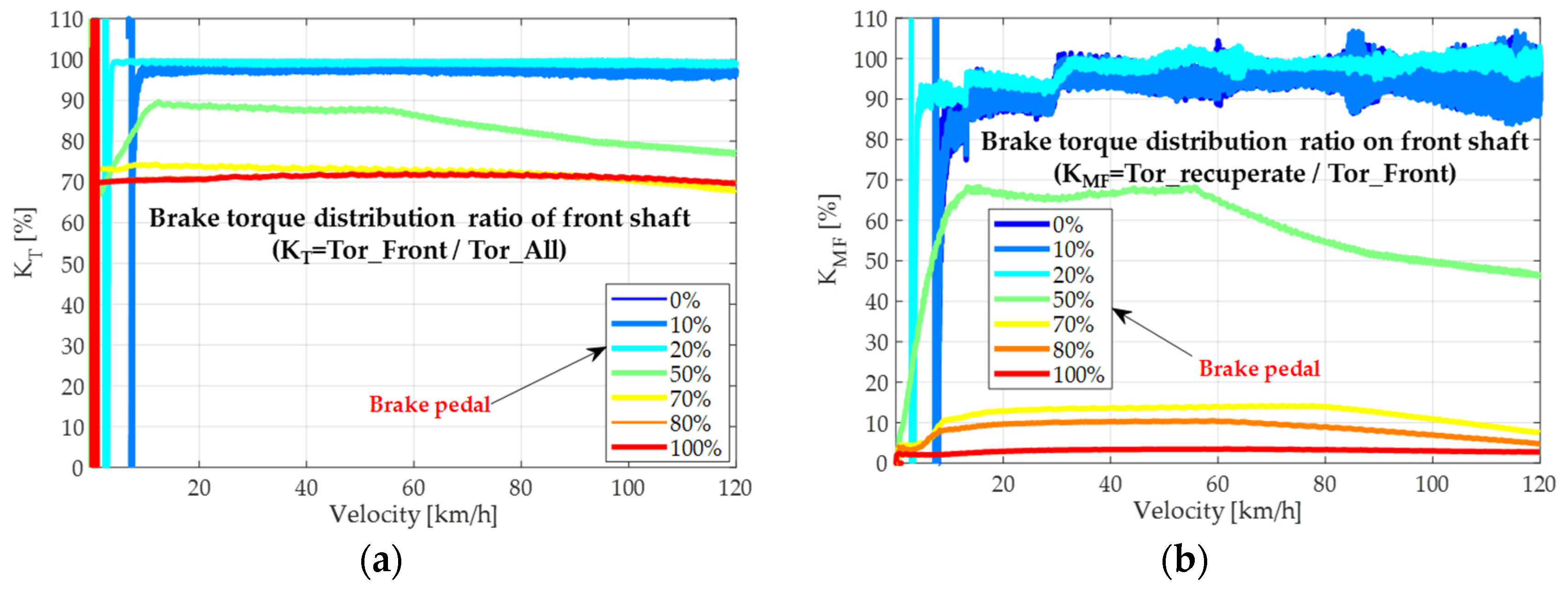
3.1.5. Recuperation Model and Accessory Model
3.1.6. Control Strategy Model
3.2. The Usage of Energy Distribution Model
4. Analysis of Energy Consumption Reduction Based on Software and Hardware Optimization
4.1. Optimization Methods
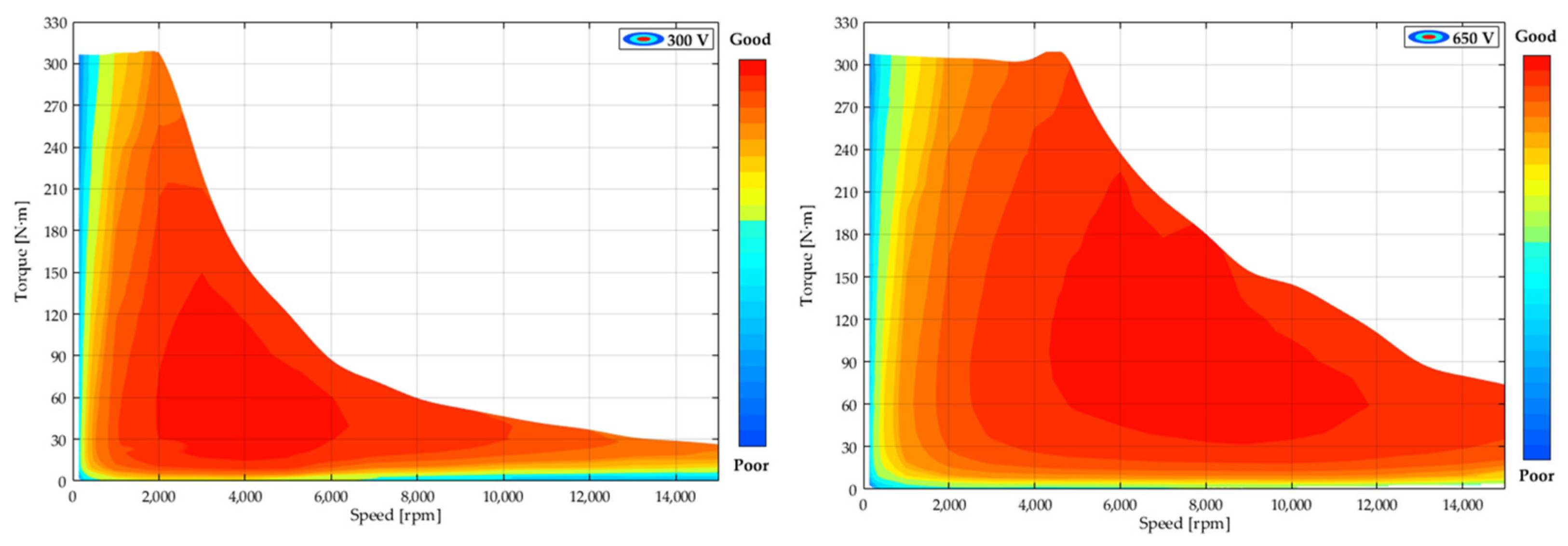
4.1.1. Voltage Boost Technology
4.1.2. Control Strategy Optimization
4.1.3. Theoretical Calculation and Bench Test
4.2. Results of Hardware Optimization
4.3. Results of Hardware and Software Optimization
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| EHS | Electric Hybrid System |
| DHT | Dedicated Hybrid Transmission |
| AER | All-Electric Range |
| PHEV | Plug-In Hybrid Electric Vehicle |
| HEV | Hybrid-Electric Vehicle |
| CD | Charged Deploying |
| CS | Charge Sustaining |
| OBC | Onboard Charger |
| SOC | State of Charge |
| OTA | Over-the-air (Technology) |
| NEDC | New European Driving Cycle |
| WLTC | Worldwide Harmonized Light Vehicles Test Cycle |
| IPB | Integrated Power Brake |
References
- Energy and New Energy Vehicle Technology Roadmap Strategic Advisory Committee. Energy-Saving and New Energy Vehicle Roadmap 2.0, SAE-China; Mechanical Industry Press: Beijing, China, 2020; pp. 1–65. [Google Scholar]
- Wang, Y.G. Comparative analysis of hybrid power system of mainstream dual motor. China Auto 2019, 4, 30–34. [Google Scholar]
- Ide, H.; Sunaga, Y.; Higuchi, N. Development of SPORT HYBRID i-MMD Control System for 2014 Model Year Accord. Introd. New Technol. 2013, 25, 33–41. [Google Scholar]
- Lu, Z.J.; Su, H.X. Viewing the Route of BYD’s Plug-in Hybrid Architecture Technology Based on Patent Analysis. Commer. Veh. 2020, 1, 90–92. [Google Scholar]
- Zeng, X.H.; Yang, N.N.; Song, D.F.; Xiao, L.; Ba, T. HEV Energy Consumption Analysis Based on Power Loss Model. Automot. Eng. 2017, 39, 630–635, 660. [Google Scholar]
- Zeng, X.H.; Li, G.H.; Song, D.F.; Zhu, G.H.; Wang, Y.S. Analysis of Theoretical Fuel Consumption of Hybrid Electric System Based on Energy Calculation Model. Automot. Eng. 2019, 41, 266–275. [Google Scholar]
- Morteza, M.; Mehdi, M. An Optimal Energy Management Development for Various Configuration of Plug-in and Hybrid Electric Vehicle. J. Cent. South Univ. 2015, 22, 1737–1747. [Google Scholar]
- Gokce, K.; Ozdemir, A. An Instantaneous Optimization Strategy Based on Efficiency Maps for Internal Combustion Engine/Battery Hybrid Vehicles. Energy Convers. Manag. 2014, 81, 255–269. [Google Scholar] [CrossRef]
- Jeong, J.; Lee, D.; Kim, N.; Zheng, C.; Park, Y.-I.; Cha, S.W. Development of PMP-based power management strategy for a parallel hybrid electric bus. Int. J. Precis. Eng. Manuf. 2014, 15, 345–353. [Google Scholar] [CrossRef]
- Ohkubo, N.; Matsushita, S.; Ueno, M.; Akamine, K.; Hatano, K. Application of Electric Servo Brake System to Plug-in Hybrid Vehicle. SAE Int. J. Passeng. Cars-Electron. Electr. Syst. 2013, 6, 255–260. [Google Scholar] [CrossRef]
- Snihir, I.; Rey, W.; Verbitskiy, E.; Belfadhel-Ayeb, A.; Notten, P.H. Battery open-circuit voltage estimation by a method of statistical analysis. J. Power Sources 2006, 159, 1484–1487. [Google Scholar] [CrossRef] [Green Version]
- Dubarry, M.; Svoboda, V.; Hwu, R.; Liaw, B.Y. Capacity Loss in Rechargeable Lithium Cells during Cycle Life Testing: The Im-portance of Determining State-of-charge. J. Power Sour. 2007, 174, 1121–1125. [Google Scholar] [CrossRef]
- Liu, Y.; Gong, Y.; Li, J.; Chen, H.E. Research on the Technology Development of 45%~50% Thermal Efficiency of Gasoline Engine. Automot. Dig. 2019, 7, 22–26. [Google Scholar]
- Toshiro, H.M.T.; Yoichi, I. A Power Efficiency Improvement Technique for a Bidirectional Dual Active Bridge DC-DC Converter at Light Load. IEEE Trans. Ind. Appl. 2014, 50, 4047–4055. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Item | Specification |
|---|---|---|
| Engine | Type | L4 1.5L Atkinson |
| Power | 81 kW | |
| Torque | 135 N·m | |
| Generator | Type | DC brushless motor |
| Power | 70 kW | |
| Torque | 90 N·m | |
| Traction motor | Type | DC brushless motor |
| Power | 132 kW | |
| Torque | 316 N·m | |
| Battery | Type | LiMPO4 |
| Capacity | 8.32 kWh | |
| Vehicle | All-Electric Range | 55/120 km |
| Type | Sedan/SUV |
| Test Cycle | Electricity (kWh) 1 | Fuel (kg) 2 | Energy Ratio (%) 3 | Energy Consumption (L/100 km) 4 |
|---|---|---|---|---|
| WLTC | −0.085 | 0.900 | −0.79 | 5.28 |
| NEDC | 0.036 | 0.317 | 0.94 | 3.92 |
| Test Cycle | Electricity (kWh) | Voltage (V) | Energy Consumption (kWh/100 km) 1 | Bench Test (kWh/100 km) | Error (%) 2 |
|---|---|---|---|---|---|
| NEDC | 1.422 | 300 | 12.93 | 13.33 | −3.0 |
| 1.404 | 500 | 12.76 | 13.03 | −2.1 | |
| 1.363 | Voltage boost | 12.39 | 12.84 | −3.5 | |
| WLTC | 3.431 | Voltage boost | 14.75 | 14.45 | 2.1 |
| Test Cycle | Electricity (kWh) | Voltage (V) | Fuel (kg) | Energy Ratio (%) | Energy Consumption (L/100 km) | Bench Test (L/100 km) | Error (%) |
|---|---|---|---|---|---|---|---|
| WLTC | −0.085 | 300 | 0.900 | −0.79 | 5.28 | 5.59 | −4.9 |
| −0.045 | 500 | 0.881 | −0.43 | 5.16 | 5.39 | −4.2 | |
| −0.048 | 650 | 0.896 | −0.45 | 5.25 | 5.48 | −4.1 | |
| 0.086 | Voltage boost | 0.872 | 0.81 | 5.11 | 4.90 | 4.3 | |
| NEDC | 0.032 | Voltage boost | 0.320 | 0.83 | 3.97 | 4.03 | −1.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, P.; He, H.; Cui, H.; Zhang, M. Research on Establishment of Vehicle Energy Distribution Model and Energy Consumption Optimization Based on Electric Hybrid System. World Electr. Veh. J. 2021, 12, 213. https://doi.org/10.3390/wevj12040213
Liang P, He H, Cui H, Zhang M. Research on Establishment of Vehicle Energy Distribution Model and Energy Consumption Optimization Based on Electric Hybrid System. World Electric Vehicle Journal. 2021; 12(4):213. https://doi.org/10.3390/wevj12040213
Chicago/Turabian StyleLiang, Peng, Huatuo He, Huafang Cui, and Minglang Zhang. 2021. "Research on Establishment of Vehicle Energy Distribution Model and Energy Consumption Optimization Based on Electric Hybrid System" World Electric Vehicle Journal 12, no. 4: 213. https://doi.org/10.3390/wevj12040213
APA StyleLiang, P., He, H., Cui, H., & Zhang, M. (2021). Research on Establishment of Vehicle Energy Distribution Model and Energy Consumption Optimization Based on Electric Hybrid System. World Electric Vehicle Journal, 12(4), 213. https://doi.org/10.3390/wevj12040213