1. Introduction
With the continuous development of automobile industry, the problems of environmental pollution and energy shortage appear. At present, many countries begin to formulate the development plan of new energy vehicles. New energy vehicles mainly include: pure electric vehicles (EV), fuel cell vehicles (FCV) and HEV. EV has only one power source and the structure is simple, but the disadvantages of long battery charging time and short driving range restrict the development of EV. FCV uses the principle of hydrogen chemical reaction power generation to achieve zero emission, but the high manufacturing cost and the safety of hydrogenation station restrict the development of FCV. HEV can combine two or more power sources, especially plug-in hybrid electric vehicle (PHEV) that obtains electric energy from the power grid as the main power source. Combined with engine power, HEV not only has the characteristics of low pollution of pure electric vehicle, but also solves the problem of short driving range of pure electric vehicle. It is a feasible new energy vehicle development scheme at this stage [
1]. The energy management strategy of HEV is the technical core of HEV, which can reasonably distribute the power of two power sources and improve the fuel economy of the vehicle as much as possible under the condition of meeting the power performance [
2,
3]. The role of an energy management strategy is to allocate the torque of the engine and motor according to the driver’s demand, so as to improve the fuel economy of the whole vehicle. The PHEV combines an internal combustion engine with an electric motor [
4]. HEV energy management strategies can be divided into the following types:
The first is rule-based energy management strategy. This strategy is relatively simple and easy to implement [
5]. However, the control parameters are mainly based on experience and are difficult to adapt to complex working conditions [
6,
7,
8,
9]. The second is global optimization energy management strategy. This strategy takes the minimum fuel consumption in the whole driving cycle as the optimization objective, and applies the optimal control theory algorithm to solve the corresponding torque distribution at each time [
10]. The optimization algorithms mainly include dynamic programming, Pontryagin’s minimum principle and genetic algorithm [
11,
12]. The third is instantaneous optimal energy management strategy, such as ECMS. This strategy can get the minimum equivalent fuel consumption for each time instant, but the sum of the minimum equivalent fuel consumption at each time is not equal to the minimum equivalent fuel consumption under the whole driving condition.
The ECMS is an energy management strategy that aims at minimum instantaneous equivalent fuel and is used in the charge sustaining phase of PHEV [
13]. The ECMS means to minimize the sum of the actual fuel consumption of the engine and the equivalent fuel consumption of the electric power consumed or generated by the motor at each time. In ECMS, the choice of EF has a very important impact to solve the optimal control sequence. Under the determined EF, ECMS aim at the minimum equivalent fuel consumption at each instantaneous moment to realize the real-time control of the strategy, and the EF determines the final control effect. However, the determine of the optimal EF needs complete working condition information, and not suitable for different working conditions [
14]. In view of this, the method of adaptive adjustment of EF is often used in order to achieve better control of ECMS under different working conditions. At present, there are still many problems in the optimization of ECMS. Considering the current problems of inaccurate speed prediction and weak adaptability of EF of ECMS, in order to improve the adaptability of EF of the ECMS, this study mainly focuses on the following aspects:
Firstly, this paper proposes an EF adaptive adjustment method based on the speed prediction information, which is predicted by the neural network method. Secondly, in order to improve the accuracy of speed prediction information, the speed sequence is processed by WPT, and the future speed information is obtained by combining multiple predictors. In order to improve the reasonable utilization of battery power, the adjustment period of EF is the same as the predict period of vehicle speed. Thirdly, according to Pontryagin’s principle, an energy management strategy based on ECMS is deduced, the adaptive adjustment method of EF is studied, and the ECMS based on SOC feedback adjustment is established. Finally, the RBF-NN vehicle speed prediction model based on wavelet packet is used to predict the vehicle speed, and then the optimal EF is calculated. Through the comprehensive cycle simulation, the adaptive ECMS based on vehicle speed prediction is verified.
2. Literature Backgrounds
In the present context, many scholars have put forward a series of solutions in order to improve the ability of ECMS to adapt to different working conditions. D. Qin took into account the influence of driver’s driving styles on fuel consumption and obtained the corresponding EF value range by using the speed characteristics of driving styles [
15]. L. Liu solved the optimal EF under standard working conditions offline, identified the corresponding working conditions online, and realized the adjustment of the EF with the change of working conditions [
16]. A. Rezaei deduced the upper and lower limits of the optimal EF based on the average efficiency value of the vehicle assembly [
17]. S. Yang assumed that the electric energy used at the current moment came from the heat transfer at the previous stage, designed the dynamic EF self-determination algorithm, and developed the adaptive power maintenance algorithm to realize the adaptive adjustment of EF with the change of driving state [
14]. Along with the development of model predictive control (MPC), the researchers used the ideas of the MPC rolling optimization to the adjustment of the ECMS EF, C. Sun established the vehicle speed prediction model to predict the vehicle speed information in the short term in the future by using the neural network principle, and calculated the optimal EF by using the predicted future information, and realized the rolling adjustment of the EF [
18]. However, the solution of the optimal EF is affected by the deviation between the predicted information and the real information. Therefore, improving the accuracy of the prediction model is an effective way to realize the reasonable adjustment of the EF.
In summary, the energy management strategies still have their limitations, and there is still room for further improvement to improve the fuel economy of hybrid electric vehicles. In particular, problems of inaccurate speed prediction and weak adaptability of EF of ECMS are the biggest shortcomings at present. Therefore, the research on HEV’s energy management strategy by introducing new technologies is still actively being explored. The speed prediction proposed in this study is a good way to optimize the EF of ECMS.
Through various prediction methods, we can predict the future short-term driving conditions, driver operation and other information in real time. Using these information, we can use the optimization algorithm to solve the corresponding optimal control sequence, and take it as the control in actual driving, which can significantly improve the control effect. Compared with the methods of other scholars, this study combines WPT with speed predictor based on RBF-NN, so that the accuracy of vehicle speed prediction has been improved significantly. Next, the high-precision RBF-NN speed prediction model is used to predict the future vehicle speed, and then the optimal EF is calculated by using the principle of ECMS. Therefore, the adaptability of EF of the ECMS has also been improved effectively.
3. Powertrain Model
The energy management strategy introduced in this paper takes a PHEV as the research object, and its powertrain structure is shown in
Figure 1.
The car adopts parallel hybrid power configuration, and its power and transmission system mainly consists of engine, clutch, transmission, power battery, motor and power coupler. Through power coupler, it can realize the integration of two kinds of power supply and distribution, achieving pure electric, pure motor drive, hybrid drive mode. Additionally, it can also realize energy recovery when the car is in braking or sliding mode. Furthermore, it can also use redundant power from engine to recharge the battery in the charging mode of driving, or enter into parking charging mode when the battery is low. The main parameters of the vehicle are shown in
Table 1.
4. Speed Prediction Model
The driving speed reflects the operating conditions of the road and the driver in the process of driving. If the information of future driving conditions can be predicted, the energy management strategy can be reasonably formulated according to it. Therefore, that electric energy and engine power can be reasonably distributed while under the condition of meeting the demand for power to obtain better fuel consumption.
4.1. RBF-NN Speed Prediction Model
There are many kinds of implementation speed prediction methods, and they are mainly based on the exponential function, the Markov chain, and neural network. In addition, Y. Zhang developed a comprehensive speed profile prediction method, which combined the macro and micro speed prediction based on the Precise-Spike-Driven (PSD) method with the linear regression MC, estimated the parameters in the linear regression through polynomial features (PF), and synthesized the final predicted speed profile [
19]. By using vehicle to vehicle (V2V) communication technology, F. Zhang realized accurate prediction of future speed [
20]. Speed prediction methods based on the exponential function or Markov chain are able to fit the future trend of the speed, but with the increase of predict period, accuracy decreased more obviously, and its adaptability to condition changes is poor [
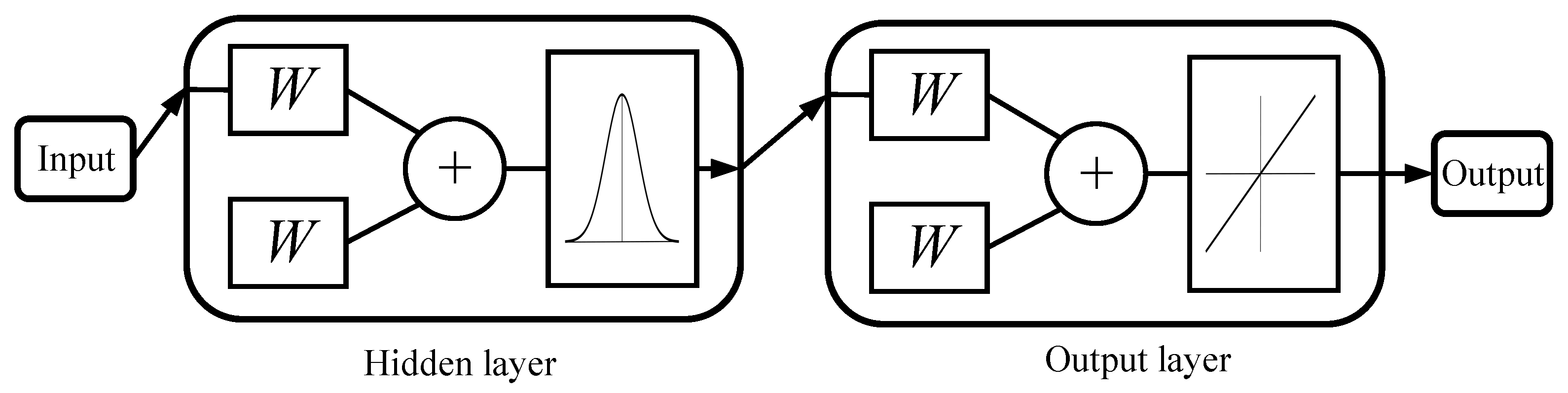
21]. However, the speed prediction method based on neural network can accurately predict the future speed sequence by using the learning fitting characteristics of artificial neural network and sample condition training, and the implementation method is relatively simple. Therefore, RBF-NN is adopted in this paper to predict the future speed, and its topological structure is shown in
Figure 2.
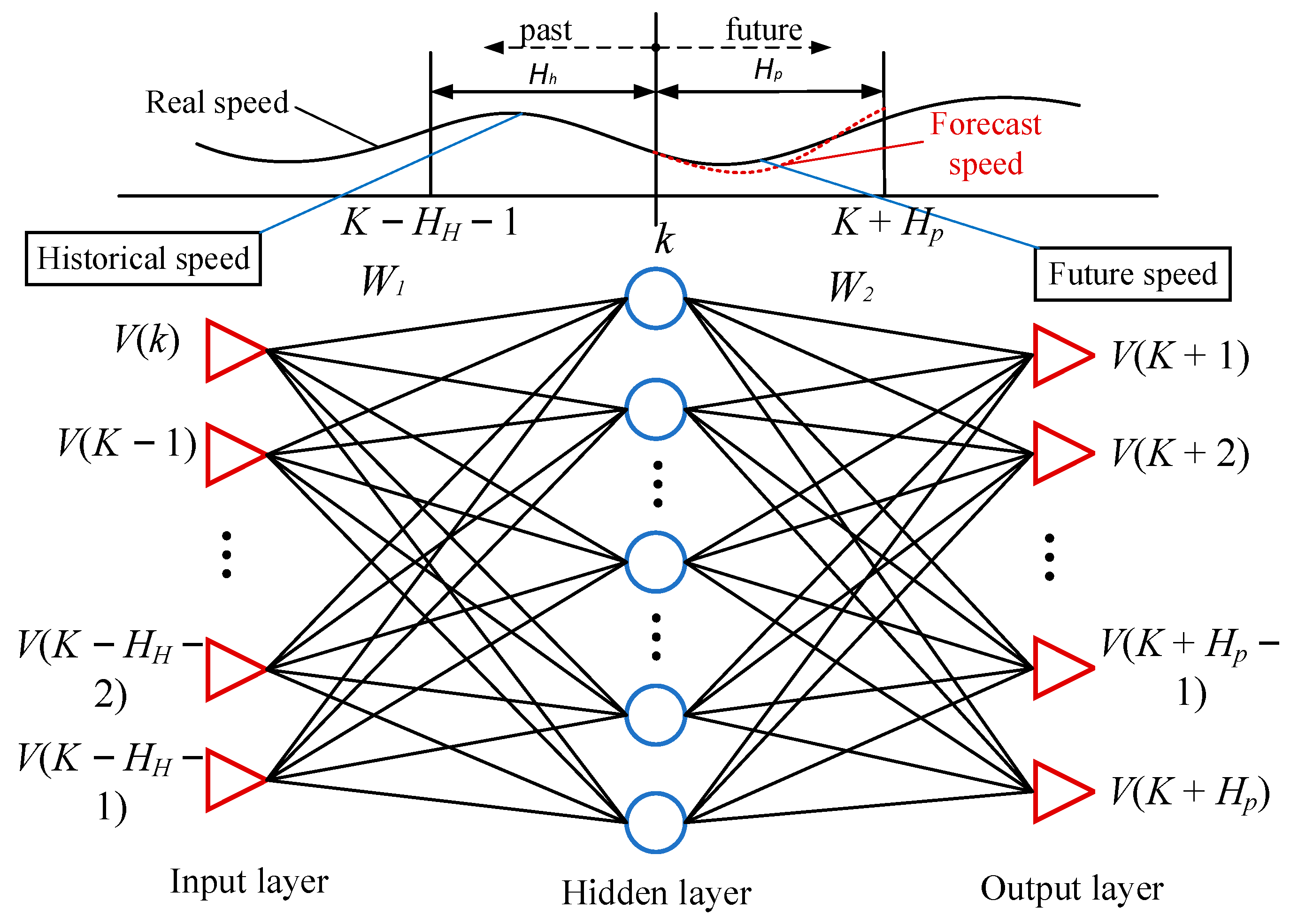
The neural network model consists of input layer, hidden layer and output layer, but RBF-NN model has only one hidden layer. The input layer of RBF-NN is composed of the input sequence of the model. The number of neurons in the hidden layer is determined according to the needs of the problem. The input sequence is transformed by nonlinear mapping, and then the output corresponding to the input signal is obtained by the linear mapping transformation of the output layer. RBF-NN uses the neurons in the hidden layer to cover all the sample patterns by clustering, and then obtains the minimum mapping error by modifying the weight of the output layer, which greatly improves the learning speed of the network and can be used for real-time predictive control. Vehicle speed prediction is a typical nonlinear time series prediction problem. RBF-NN has obvious advantages in solving this kind of prediction problem. Due to the learning and fitting characteristics of neural network. This study only takes vehicle speed as the input and output of the vehicle speed prediction model. The schematic diagram of vehicle speed prediction is shown in
Figure 3.
The historical speed information
in the current time
and the past
time is defined as the input of the neural network, and the future speed information
in the future
time is defined as the output of the neural network, then its mapping relationship is:
Considering the complex types of working conditions faced by the prediction model in practical application, in order to make the prediction model have good prediction accuracy under various working conditions and improve the working condition adaptability of the prediction model, this paper selects six working conditions as the training sample data of the model, including Manhattan congestion, SC03, ARB02, REP05, LA92 and HWFT. The combined conditions include urban conditions, suburban conditions, congestion conditions and high-speed conditions.
Then, the error of each prediction and the overall root mean square error are taken as the evaluation index, and the corresponding optimal input speed duration and spread parameters are solved according to different prediction duration.
Figure 4 shows the prediction effect chart under China light-duty vehicle test cycle (CLTC) condition. The error and root mean square error of each prediction are calculated according to Equation (3).
where,
is the root mean square error of each prediction, km/h.
is the root mean square error of the whole prediction process, km/h.
is the length of the test condition (time, s).
As can be seen from the figure, the speed predicted by the model based on RBF-NN can keep consistent with the change trend of the real speed every time, and can achieve good prediction accuracy. However, it is found that with the increase of the predicted time length, the deviation between the predicted speed and the actual speed also increases, and the resulting prediction error also becomes larger. Moreover, the variation trend of the prediction error under the same working condition is similar, and the acceleration mutation exists in the places with large errors. Therefore, if the speed information can be analyzed more perfectly, the prediction effect of RBF-NN speed prediction model in the long time domain can be further improved.
The error under CLTC condition of different predict time lengths are shown in
Table 2.
4.2. RBF-NN Speed Prediction Model Based on WPT
Wavelet transform (WT) is the most widely used time-frequency analysis method in the analysis of unstable signals. It can decompose the original signal into high-frequency and low-frequency signals according to different scales, and the decomposed signal has both time domain and frequency domain characteristics. Z. Chen combined WT with RBF-NN to improve the accuracy of speed prediction [
22]. WPT, as the development of WT, can divide the frequency band into multiple layers and decompose the high frequency and low frequency signals of each layer. At the same time, it can select the corresponding frequency band adaptively to improve the time-frequency resolution. On the basis of WT, WPT can get more detail information, and make its signal analysis more comprehensive.
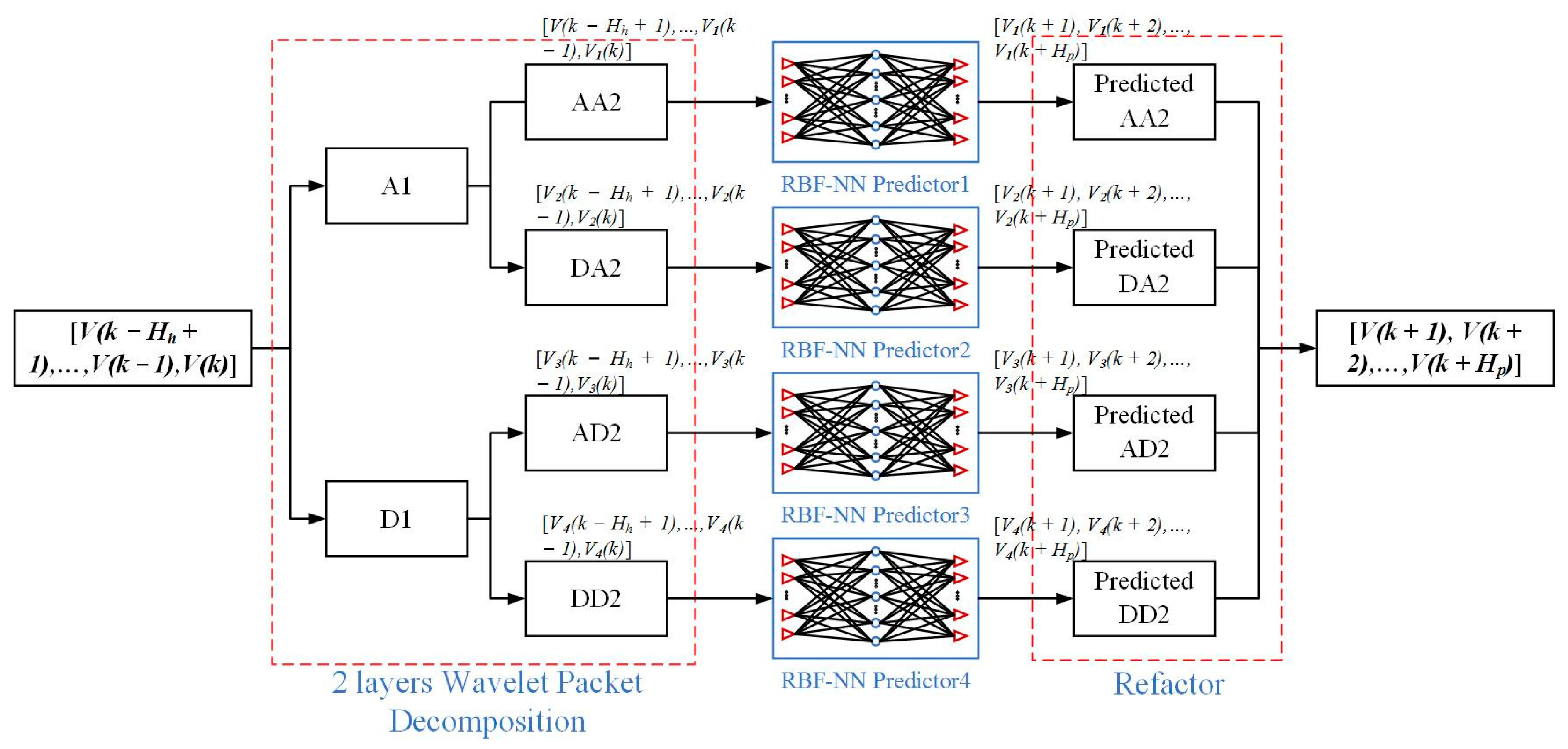
WPT has the characteristics of decomposition and reconstruction. After the decomposition of the wavelet packet, the driving conditions have more detailed information. When using the RBF-NN for training and prediction, the fluctuation and trend of the speed can be analyzed more comprehensively. In this paper, the WPT is combined with the vehicle speed predictor based on RBF-NN. Firstly, the two-scale decomposition of the input vehicle speed sequence is divided into an approximate coefficient and three detail coefficients by the wavelet packet decomposition principle. Then, four RBF-NN predictors are used to take the four coefficient sequences as the input of the predictor to get the corresponding four groups of prediction coefficient sequences. Then, the wavelet packet reconstruction is used to get the corresponding predicted speed sequence, and the speed prediction model of RBF-NN based on WPT is established, as shown in
Figure 5.
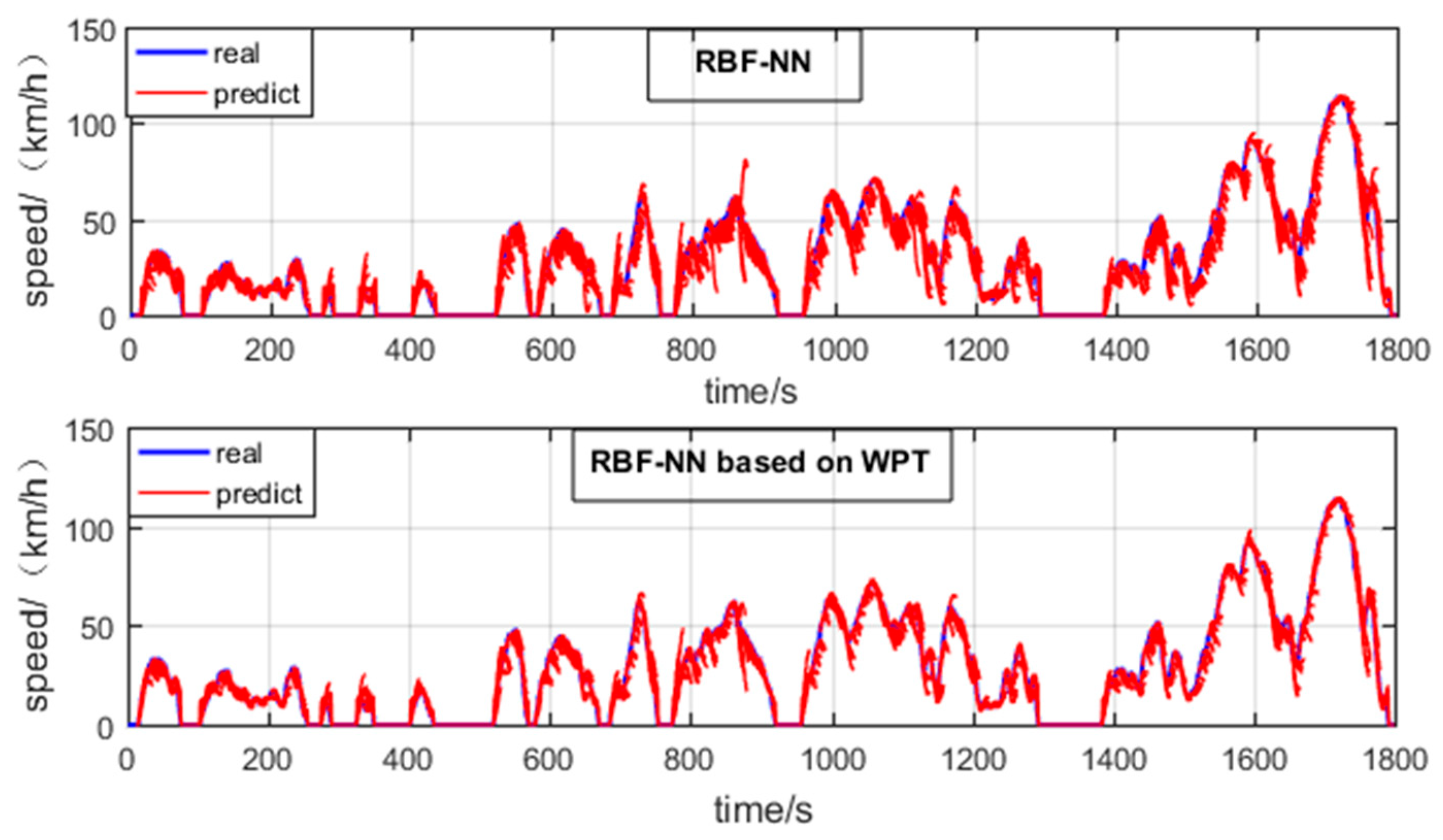
The two-layer wavelet packet decomposition process in the figure can be realized by using filters, which can reduce the calculation of integral solution and improve the calculation speed. The training conditions in the previous section are used as the training data, and the prediction effect and error comparison under China’s typical working conditions CLTC are shown in
Figure 6 and
Figure 7.
Comparison shows that the prediction results of RBF-NN speed prediction model based on WPT are more similar to the change trend of real vehicle speed on the whole, and the prediction effect at the sudden change position of acceleration is also improved, so that the predicted speed trend at the speed turning point is in line with the change trend of real vehicle speed. It shows that the combine method makes the neural network analysis of the variation trend and details of driving conditions more comprehensive, and can improve the accuracy of vehicle speed prediction. It has a great reference value for the acquisition of future speed variation trend and the application of energy management strategy based on speed prediction.
5. EF Adaptive Adjustment Method for ECMS
5.1. ECMS
ECMS is derived from the Pontriagin’s Minimum Principle (PMP) [
23]. Its main idea is to equate the electric energy consumed in the power maintenance stage to fuel oil, and transform the optimization goal of fuel consumption into the solution of the lowest problem of equivalent fuel consumption. The instantaneous equivalent fuel consumption in the power maintenance stage can be expressed as:
where,
is the total instantaneous equivalent fuel consumption;
is the fuel used for the engine drive;
is the equivalent fuel oil consumption for the power generated by the motor drive.
The SOC as state variables, the motor torque as control variables, the Hamiltonian of the equivalent fuel consumption is minimum strategy as follows:
where,
is the EF;
is the fuel used for the engine drive;
is the rate of Change of SOC. Additionally, the change of battery power at every moment can be equivalent to fuel consumption.
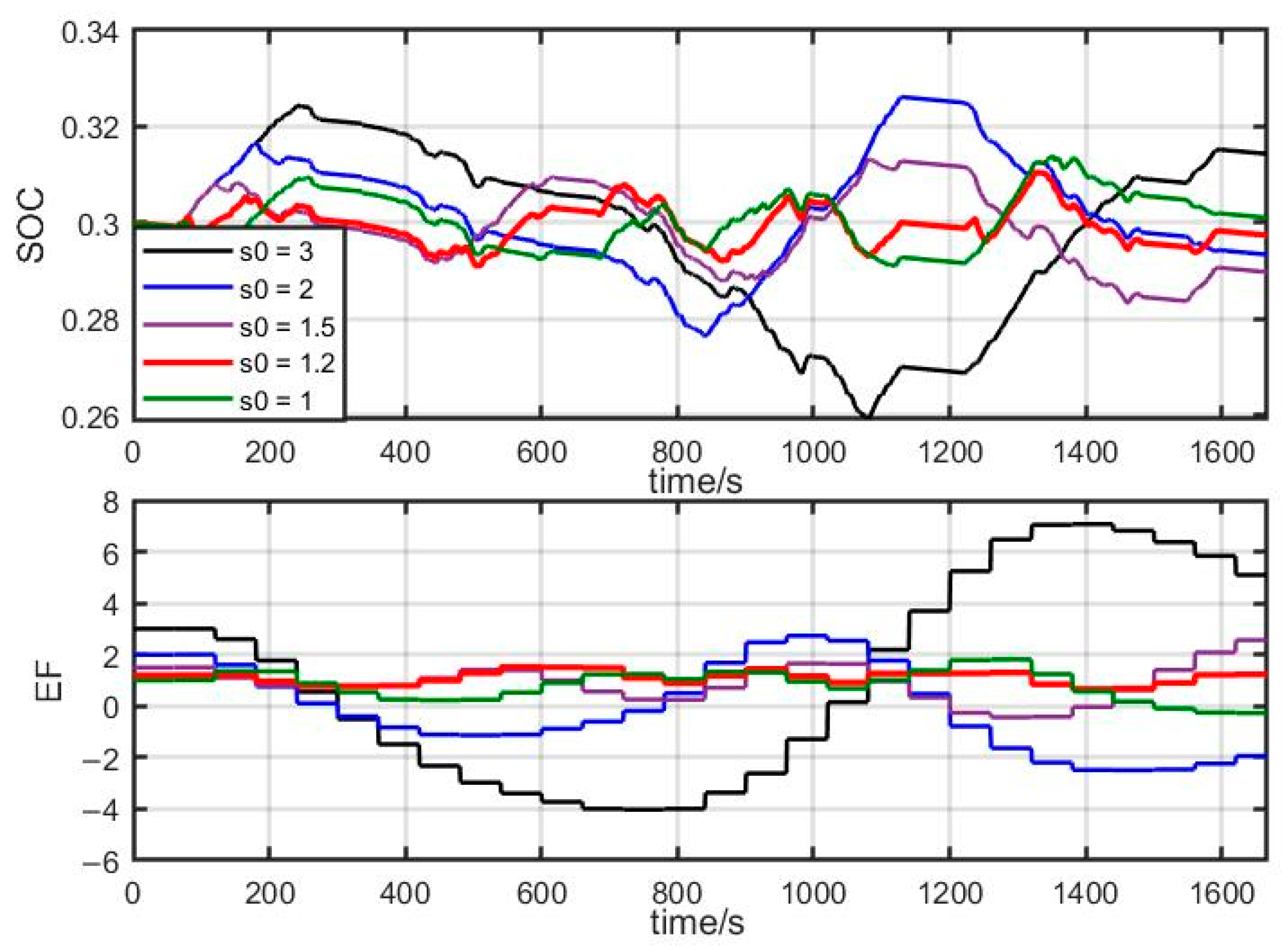
The calculation process of ECMS is to solve the optimal control variable that minimizes the equivalent fuel consumption and meets the constraint conditions at each instant under the constant EF s, which reduces the calculation of the synergistic state and improves the speed of operation. However, the choice of EF has a great influence on the effect of final control. As shown in
Figure 8, different EF values determine the overall change trend of battery SOC. However, due to the inability to obtain complete working condition information in advance and determine the optimal EF in advance, the final control result becomes worse. Therefore, the EF adaptive adjustment method needs to be adopted to improve the control effect according to the change of working condition.
5.2. EF Adaptive Adjustment Method Based on SOC Feedback
It can be seen from the previous section that the value of EF trend has a great influence to the battery SOC. When the value of equivalent factor is too large, the change of battery SOC tends to increase, and when the value of equivalent factor is too small, the change of battery SOC tends to decrease. Therefore, the EF can be adjusted according to the deviation between the battery SOC and the target value, which can be mainly divided into two forms: continuous regulation and periodic regulation. The periodic regulation method adopted in this paper can be expressed in Equation (6).
where,
is the EF value after the
adjustment.
is the battery SOC at the
adjustment;
is the reference value of battery SOC;
is the proportionality coefficient, which can be obtained by cut and trial. Constant proportionality coefficient may lead to insufficient or excessive adjustment of battery SOC at times. Therefore, the proportionality coefficient is often divided according to the difference between the actual SOC value and the target SOC value, as shown in Equation (7).
where,
,
and
are thresholds to divide the proportionality coefficient. When the absolute value of the difference between the actual SOC value and the target SOC value is within the corresponding threshold range, the proportionality coefficient will obtain the corresponding value and the EF can be adjusted more reasonably.
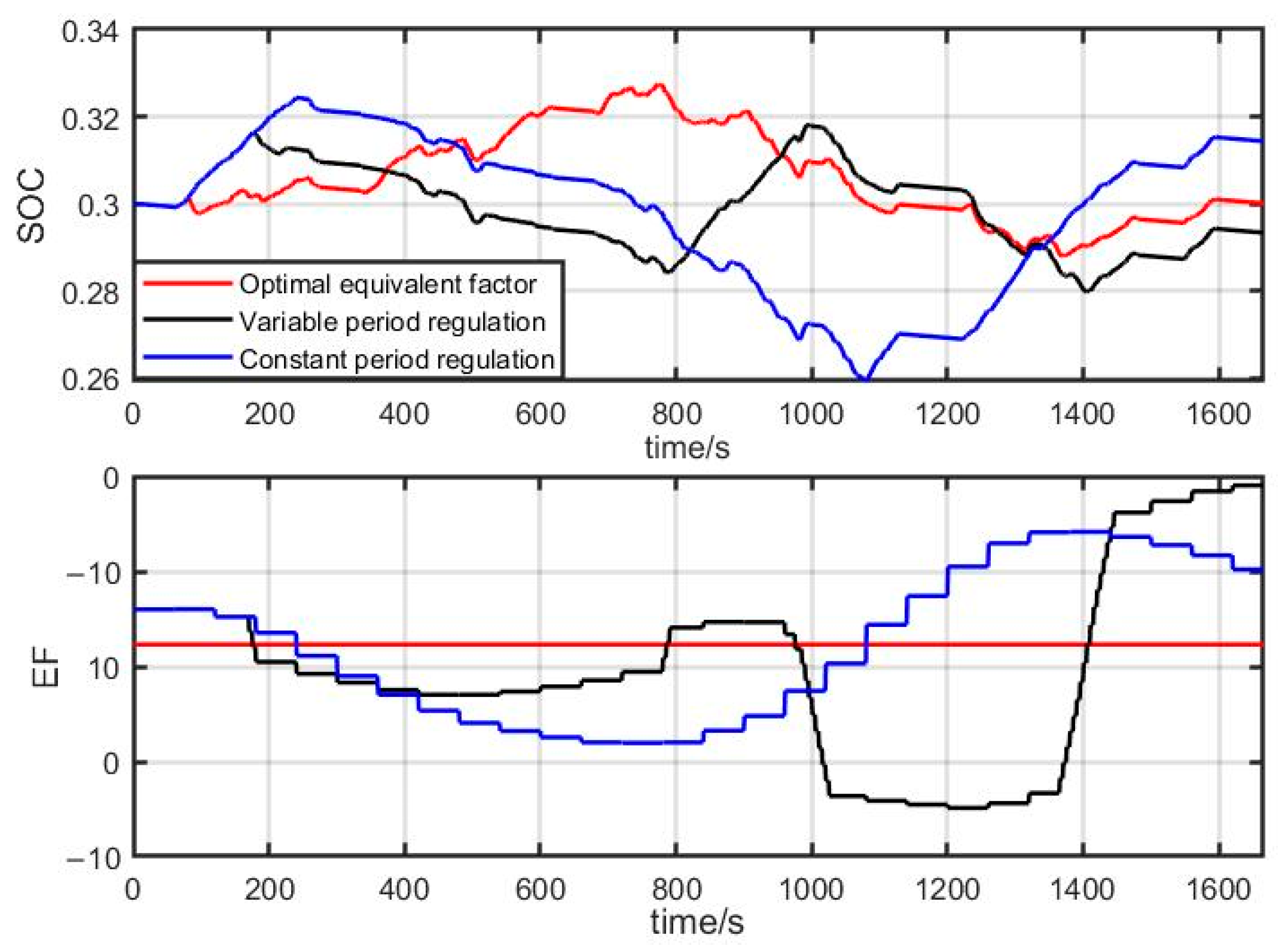
In addition, the value of the initial EF also has an important influence on the final control results. As shown in
Figure 9, when the initial EF deviates greatly from the optimal EF and the regulation period is long, the SOC will change greatly in the same direction due to the regulation lag, and the EF will be continuously adjusted in the same direction for a long time. Therefore, the final control results are poor. However, if regulation period is too short, the EF will be frequently adjusted. So that the change range of battery SOC is too small, which is not conducive to the reasonable utilization of battery energy. Referring to the method of dividing the proportional coefficient by sections according to the SOC error range, the adjustment period of the equivalent factor is divided according to the SOC error range, as shown in Equation (8).
The adjustment results of the variable period are shown in
Figure 10. When the value of the EF makes the battery SOC deviate too much from the target value, the adjustment period of the EF becomes smaller, so that the EF can be adjusted several times in a short period of time. This will lead to the rapid recovery of battery SOC to a reasonable error range and improve the final control effect.
5.3. EF Adaptive Adjustment Method Based on Speed Prediction
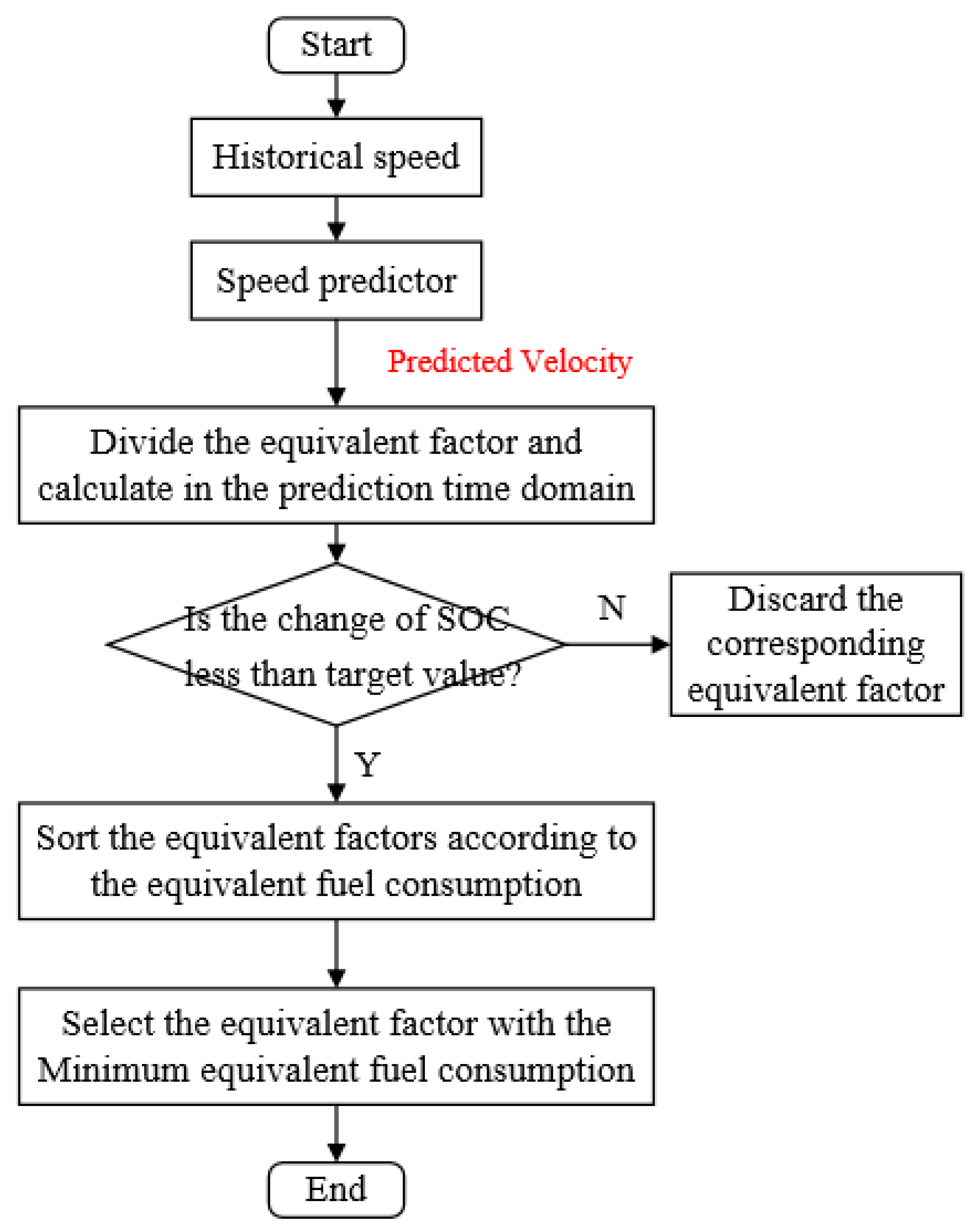
The EF adjustment method based on SOC feedback can adjust the value of EF according to the error of SOC. However, when the error of SOC is large, in order to quickly reduce the error of SOC, it is often necessary to reverse adjust the EF for many times, resulting in the phenomenon that the EF after the reduction of SOC error is too high or too low for the driving condition of the next stage so the SOC error will increase. This phenomenon repeats continuously, and the EF is in an unreasonable state for a long time. In actual driving, the end time of driving conditions is often not predictable, which also leads to poor control effect. If the driving conditions within a certain period in the future can be obtained, the optimal EF under the driving conditions can be solved, and the instantaneous optimization ECMS can be transformed into a locally optimized energy management strategy to improve the control effect and fuel consumption of the strategy.
In this paper, the high-precision RBF-NN speed prediction model based on WPT in the previous section is used to predict the future vehicle speed, and then the optimal EF is calculated by using the principle of ECMS. The optimal EF is taken as the value of the EF in actual driving. The calculation process of the optimal EF is shown in
Figure 11.
6. Validation and Results
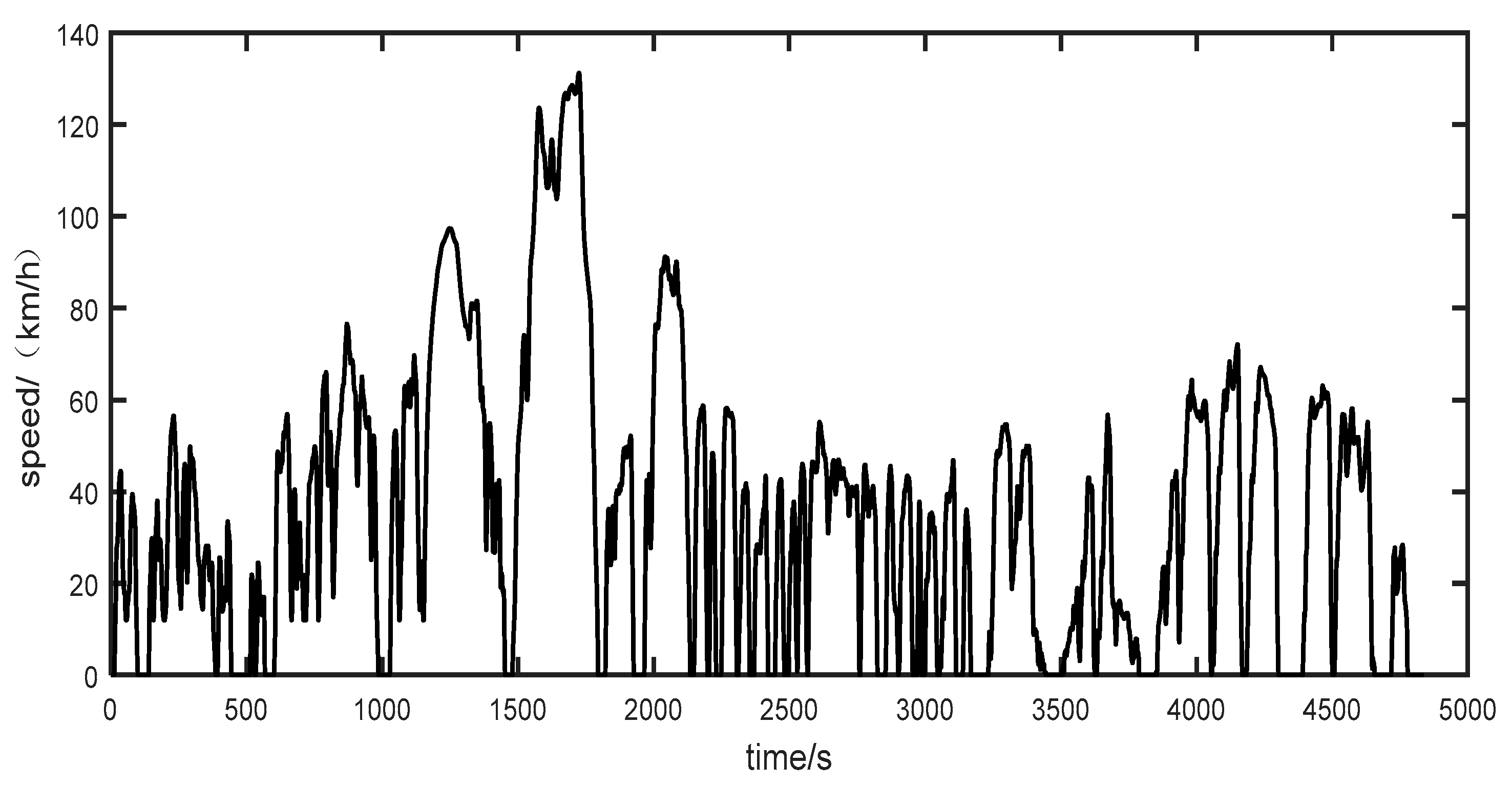
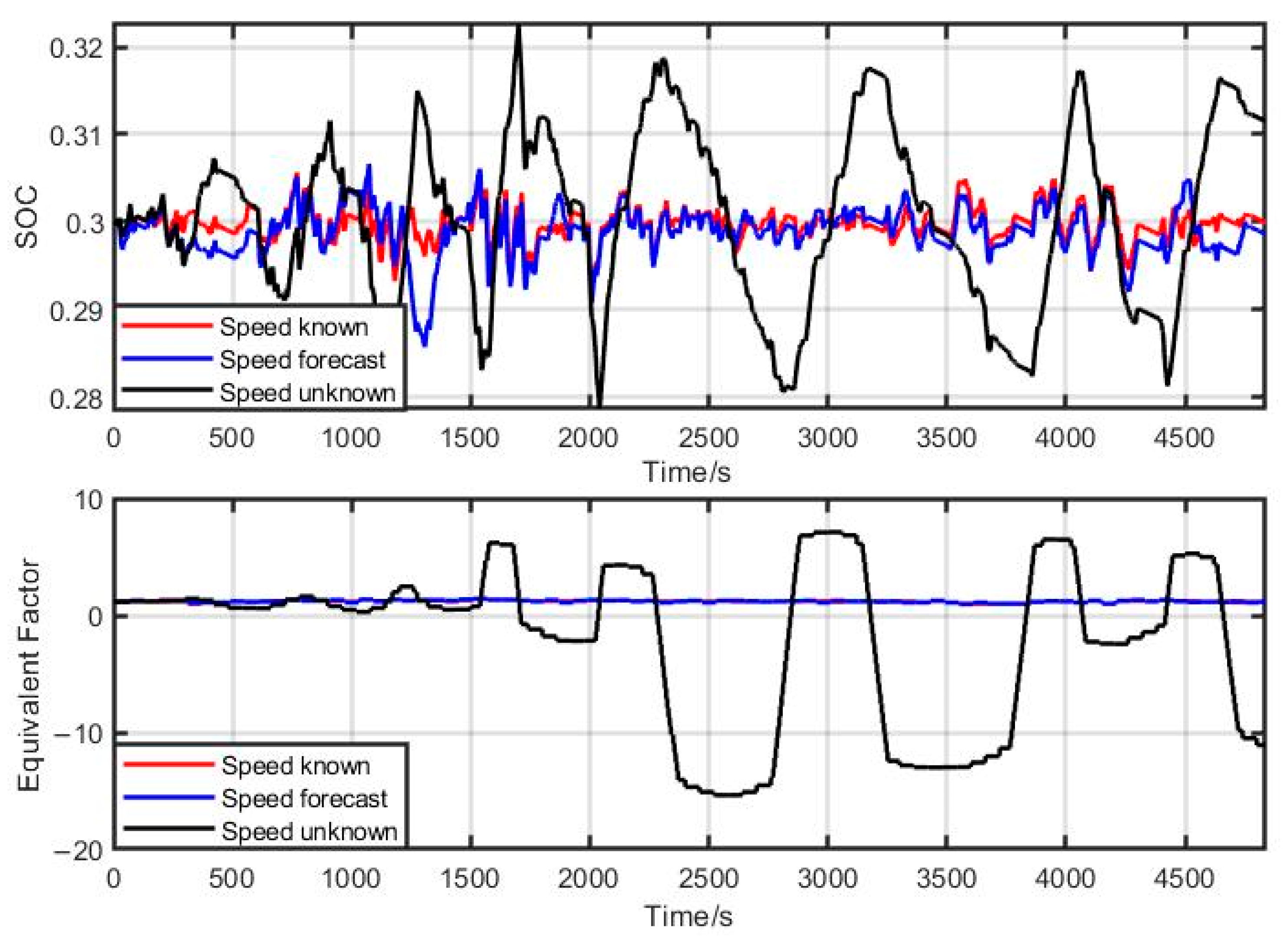
In order to verify that the EF adjustment method based on speed prediction proposed in this paper has a better control effect than the EF adjustment method based on SOC feedback and has good adaptability to different working conditions, the WLCT, UDDS and WVUSUB conditions are selected to form “WUW” condition. As shown in
Figure 12, “WUW” operating conditions include various complex operating conditions, which can be used to approximately replace the real operating conditions. Then, ECMS strategies using the two EF regulation methods are simulated under the working condition of “WUW”, and simulation results are compared as shown in
Figure 13 and
Table 3, and “Speed-known”, “Speed-predict” and “Speed-unknown” represents the EF adjustment methods that are based on real speed, speed prediction, and SOC feedback, respectively.
It can be seen from the simulation results that the EF adjustment method based on speed prediction can make the ECMS obtain better power maintenance and fuel consumption. However, there is still a lot of room for improvement compared to when the future speed is really known. This is caused by the error of speed prediction, and the optimal EF obtained according to the predicted speed is not the actual optimal EF. The control effect can be improved by improving the accuracy of speed prediction.
7. Conclusions
Aiming at the problem of EF adaptive adjustment of ECMS, this paper takes a PHEV as the research object and establishes an EF adaptive adjustment method based on SOC feedback. In view of the regulation lag caused by constant cycle regulation, the method of sectional proportionality coefficient is referred to EF regulator of variable regulation period based on SOC feedback is established. The speed prediction model based on RBF-NN is established, and the speed prediction model based on RBF-NN is improved by using the decomposition and reconstruction principle of WPT, and the accuracy of speed prediction is improved.
First, according to the principle of neural network, the vehicle speed prediction model based on RBF is established, and the effects of parameters and historical time on the prediction results are studied. Then, aiming at the problem that the prediction error increases with the increase of prediction time, the input and output sequences of RBF vehicle speed predictor are decomposed and reconstructed by using time-frequency analysis theory and WPT, and a multi-predictor RBF vehicle speed prediction model based on WPT is established, which improves the prediction accuracy to a certain extent. Based on the predicted speed, an EF adjustment method is proposed. Finally, combining the speed prediction method with the ECMS, an adaptive ECMS strategy based on speed prediction is established. The “WUW” condition composed of WLCT, UDDS and WVUSUB condition is selected as the comprehensive verification condition. Finally, it is verified that the adaptive ECMS based on vehicle speed prediction can obtain better fuel economy. Simulation results show that the proposed method has better power maintenance performance than the regulation method based on SOC feedback, and the fuel consumption is improved by 3.96%. Therefore, this study provides a feasible idea to improve the adaptability of EF of the ECMS under complex working conditions. Besides, as the simulation results show, improving the accuracy of vehicle speed prediction is conducive to improving the effect of ECMS. In summary, this study provides a reference for the improvement of PHEV’s energy management strategy.
The vehicle speed prediction model in this paper only considers the impact of historical vehicle speed on future vehicle speed changes. In future research, intelligent transportation system can be used to combine the current road traffic flow, average vehicle speed and traffic lights, and predict the future vehicle speed with higher accuracy through the big data analysis platform. In this paper, the evaluation index of energy management control strategy only considers the fuel economy of the whole vehicle, and does not study the emission performance of the whole vehicle. In the next research, multi-objective performance joint evaluation can be considered.
Author Contributions
Conceptualization, B.Z.; methodology, J.W.; software, Q.M.; validation, J.W. and Y.N.; formal analysis, Q.M.; investigation, Y.N.; resources, B.Z.; data curation, B.Z.; writing—original draft preparation, Q.M. and J.W.; writing—review and editing, Q.M. and J.W.; visualization, Y.N.; supervision, B.Z.; project administration, B.Z.; funding acquisition, B.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by “The Central Government Guided Local Science and Technology Development Projects for Anhui Provincial (Grant No. 202007d06020018)” and “the Fundamental Research Funds for the Central Universities of China (Grant No. PA2021GDSK0075)”.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Zhao, X.; Guo, G. Review on energy management strategy of hybrid electric vehicle. JAS 2016, 42, 321–334. (In Chinese) [Google Scholar]
- Su, L.; Zeng, Y.; Qin, D. Research status and development trend of energy management strategy for plug-in hybrid electric vehicle. J. Chongqing Univ. 2017, 40, 10–15. (In Chinese) [Google Scholar]
- Wang, W.; Liu, K.; Yang, C.; Xu, B.; Ma, M. Cyber Physical Energy Optimization Control Design for PHEVs Based on Enhanced Firework Algorithm. IEEE Trans. Veh. Technol. 2021, 70, 282–291. [Google Scholar] [CrossRef]
- Plötz, P.; Moll, C.; Bieker, G.; Mock, P. From lab-to-road: Real-world fuel consumption and CO2 emissions of plug-in hybrid electric vehicles. Environ. Res. Lett. 2021, 16, 054078. [Google Scholar] [CrossRef]
- Pam, A.; Bouscayrol, A.; Fiani, P.; Noth, F. Rule-Based Energy Management Strategy for a Parallel Hybrid Electric Vehicle Deduced from Dynamic Programming. In Proceedings of the 2017 IEEE Vehicle Power and Propulsion Conference, Belfort, France, 11–14 December 2017; pp. 1–6. [Google Scholar]
- Peng, J.; He, H.; Xiong, R. Rule based energy management strategyfor a series–parallel plug-in hybrid electric bus optimized by dynamic programming. Appl. Energy 2017, 185, 1633–1643. [Google Scholar] [CrossRef]
- Li, S.; Sharkh, S.; Walsh, F.; Zhang, C. Energy and battery management of a plug-in series hybrid electric vehicle using fuzzy logic. IEEE Trans. Veh. Technol. 2011, 60, 3571–3585. [Google Scholar] [CrossRef]
- Wang, Y.; Sun, Z.; Chen, Z. Development of energy management system based on a rule-based power distribution strategy for hybrid power sources. Energy 2017, 175, 1055–1066. [Google Scholar] [CrossRef]
- Padmarajan, B.; McGordon, A.; Jennings, P. Blended Rule-Based Energy Management for PHEV: System Structure and Strategy. IEEE Trans. Veh. Technol. 2016, 65, 8757–8762. [Google Scholar] [CrossRef]
- Fang, S.; Gou, B.; Wang, Y.; Xu, Y.; Shang, C.; Wang, H. Optimal hierarchical management of shipboard multibattery energy storage system using a data-driven degradation model. IEEE Trans. Transp. Electrif. 2019, 5, 1306–1318. [Google Scholar] [CrossRef]
- Musardo, C.; Rizzoni, G.; Guezennec, Y.; Staccia, B. A-ecms: An adaptive algorithm for hybrid electric vehicle energy management. Eur. J. Control. 2005, 11, 509–524. [Google Scholar] [CrossRef]
- Li, J.; Liu, Y.; Qin, D.; Li, G.; Chen, Z. Research on Equivalent Factor Boundary of Equivalent Consumption Minimization Strategy for PHEVs. IEEE Trans. Veh. Technol. 2020, 69, 6011–6024. [Google Scholar] [CrossRef]
- Yang, C.; Du, S.; Li, L.; You, S.; Yang, Y.; Zhao, Y. Adaptive real-time optimal energy management strategy based on equivalent factors optimization for plug-in hybrid electric vehicle. Appl. Energy 2017, 203, 883–896. [Google Scholar] [CrossRef]
- Yang, S.; Wang, J.; Zhang, F.; Xi, J. Self-adaptive equivalent consumption minimization strategy for hybrid electric vehicles. IEEE Trans. Veh. Technol. 2020, 70, 189–202. [Google Scholar] [CrossRef]
- Qin, D.; Zhan, S.; Zeng, Y.; Su, L. Management strategy of hybrid electrical vehicle based on driving style recognition. J. Mech. Eng. 2016, 52, 162–169. (In Chinese) [Google Scholar] [CrossRef]
- Liu, L.; Zhang, B.; Jiang, T. Equivalent consumption minimization strategy for PHEV based on driving condition adaptation. J. Automot. Saf. Energy 2020, 11, 371–378. (In Chinese) [Google Scholar]
- Rezaei, A.; Burl, J.B.; Zhou, B. Estimation of the ECMS equivalent factor bounds for hybrid electric vehicles. IEEE Trans. Control. Syst. Technol. 2018, 26, 2198–2205. [Google Scholar] [CrossRef]
- Sun, C.; He, H.; Sun, F. Investigating adaptive-ECMS with velocity forecast ability for hybrid electric vehicles. Appl. Energy 2017, 185, 1644–1653. [Google Scholar] [CrossRef]
- Zhang, Y.; Chu, L.; Ding, Y.; Xu, N.; Guo, C.; Fu, Z.; Xu, L.; Xin, T.; Liu, Y. A hierarchical energy management strategy based on model predictive control for plug-in hybrid electric vehicles. IEEE Access 2019, 7, 81612–81629. [Google Scholar] [CrossRef]
- Zhang, F.; Hu, X.; Liu, T.; Xu, K.; Duan, Z.; Pang, H. Computationally efficient energy management for hybrid electric vehicles using model predictive control and vehicle-to-vehicle communication. IEEE Trans. Veh. Technol. 2021, 70, 237–250. [Google Scholar] [CrossRef]
- Sun, C.; Hu, X.; Moura, S.J.; Sun, F. Velocity predictors for predictive energy management in hybrid electric vehicles. IEEE Trans. Control. Syst. Technol. 2015, 23, 1197–1204. [Google Scholar]
- Chen, Z.; Guo, N.; Shen, J.; Xiao, R.; Dong, P. A hierarchical energy management strategy for power-split plug-in hybrid electric vehicles considering velocity prediction. IEEE Access 2018, 6, 33261–33274. [Google Scholar] [CrossRef]
- Li, Y.; Jiao, X.; Jing, Y. A real-time energy management strategy combining rule-based control and ECMS with optimization equivalent factor for HEVs. In Proceedings of the 2017 Chinese Automation Congress, Jinan, China, 20–22 October 2017; pp. 5988–5992. [Google Scholar]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}