Local Path Planning of Driverless Car Navigation Based on Jump Point Search Method Under Urban Environment

Abstract
:1. Introduction
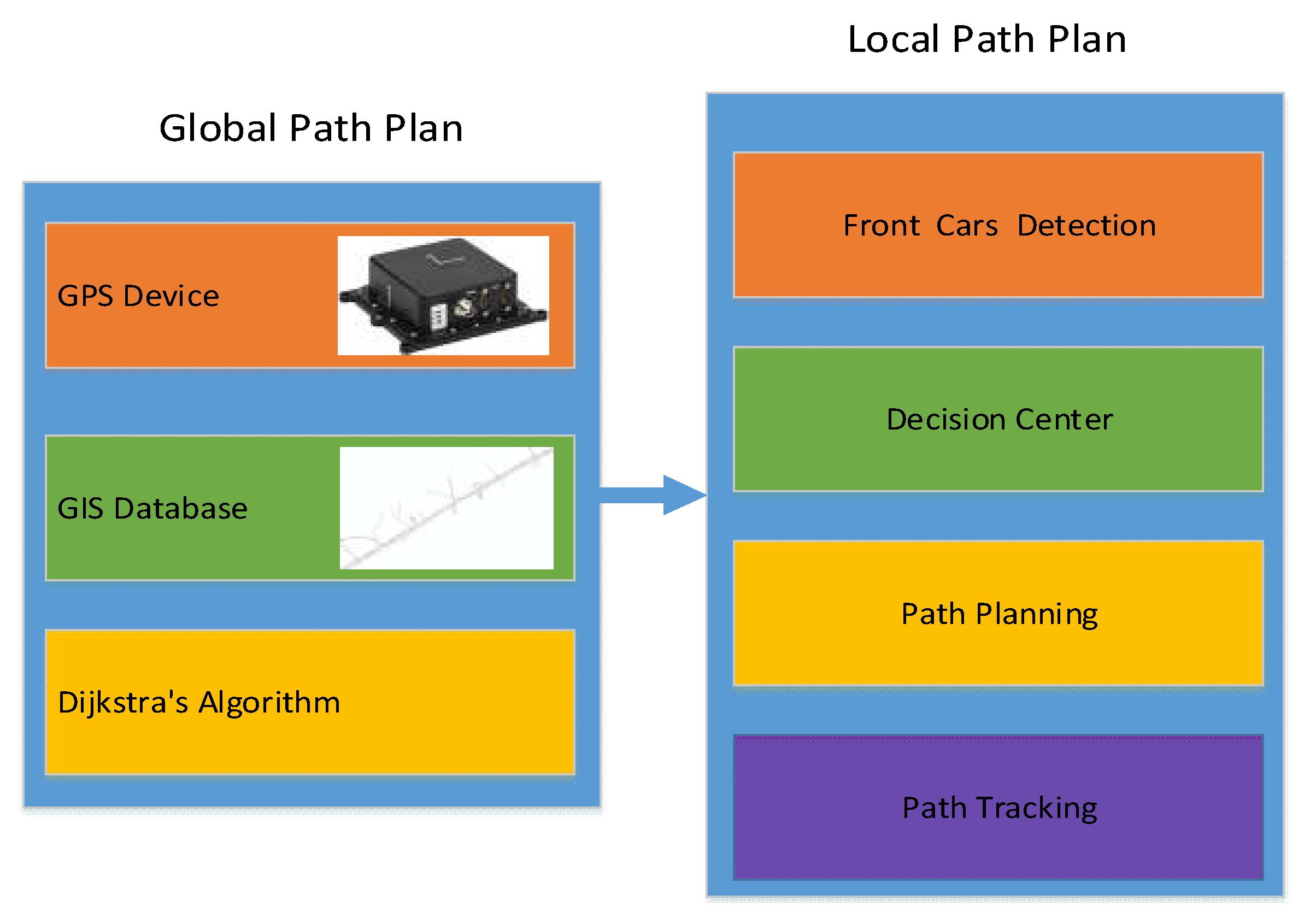
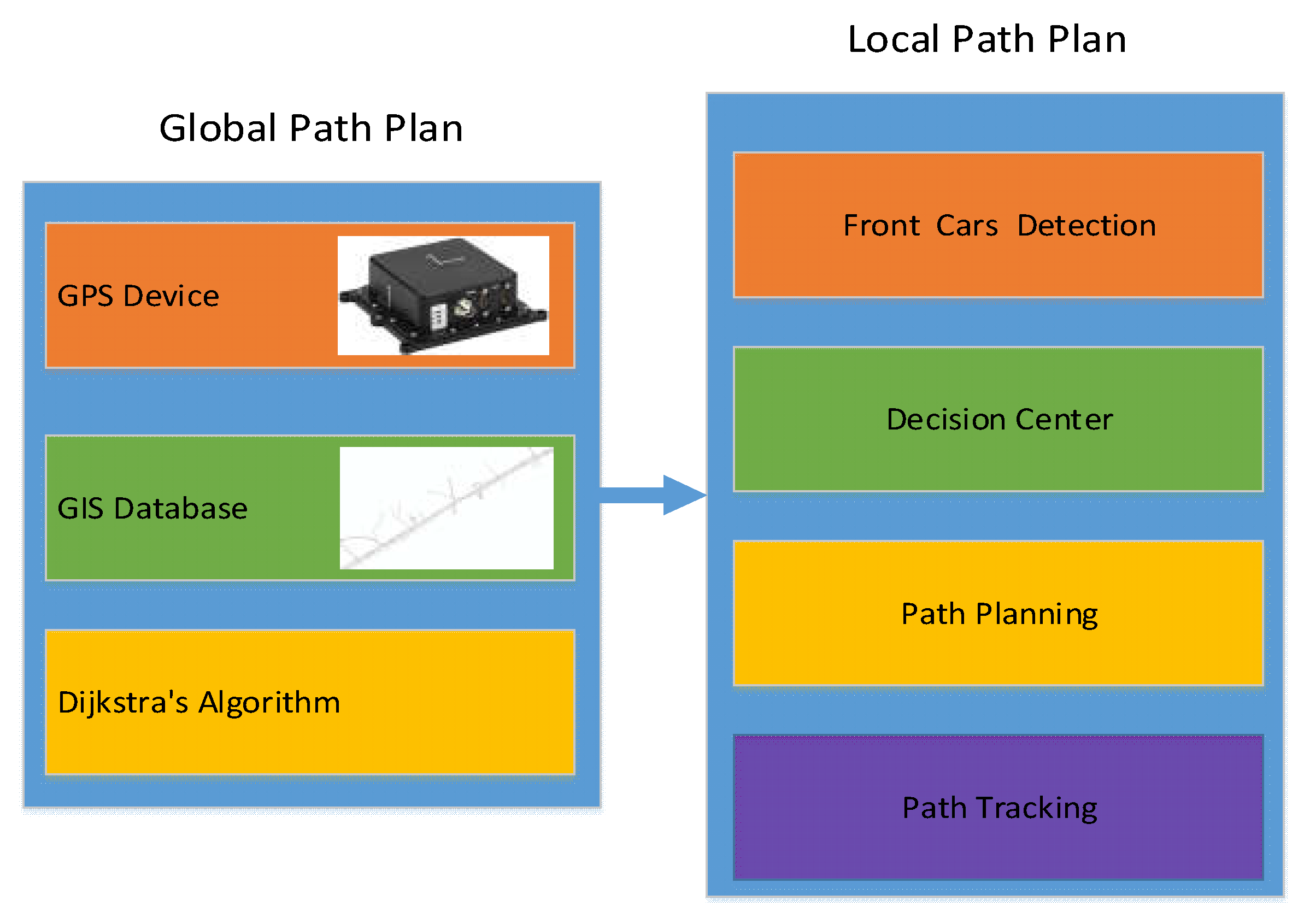
2. Framework
3. Map Building
4. Global Path Planning Based on Network Analysis Method
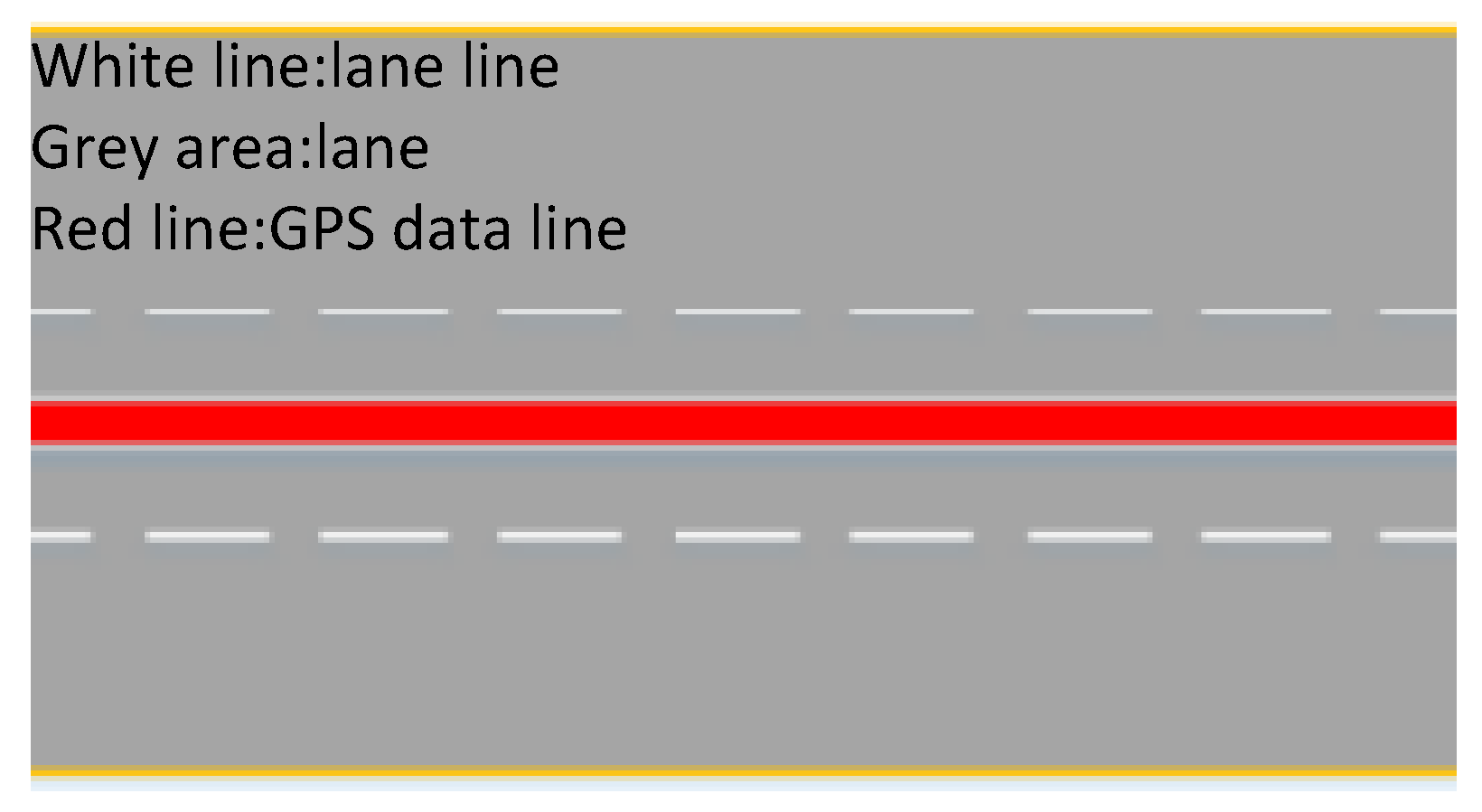
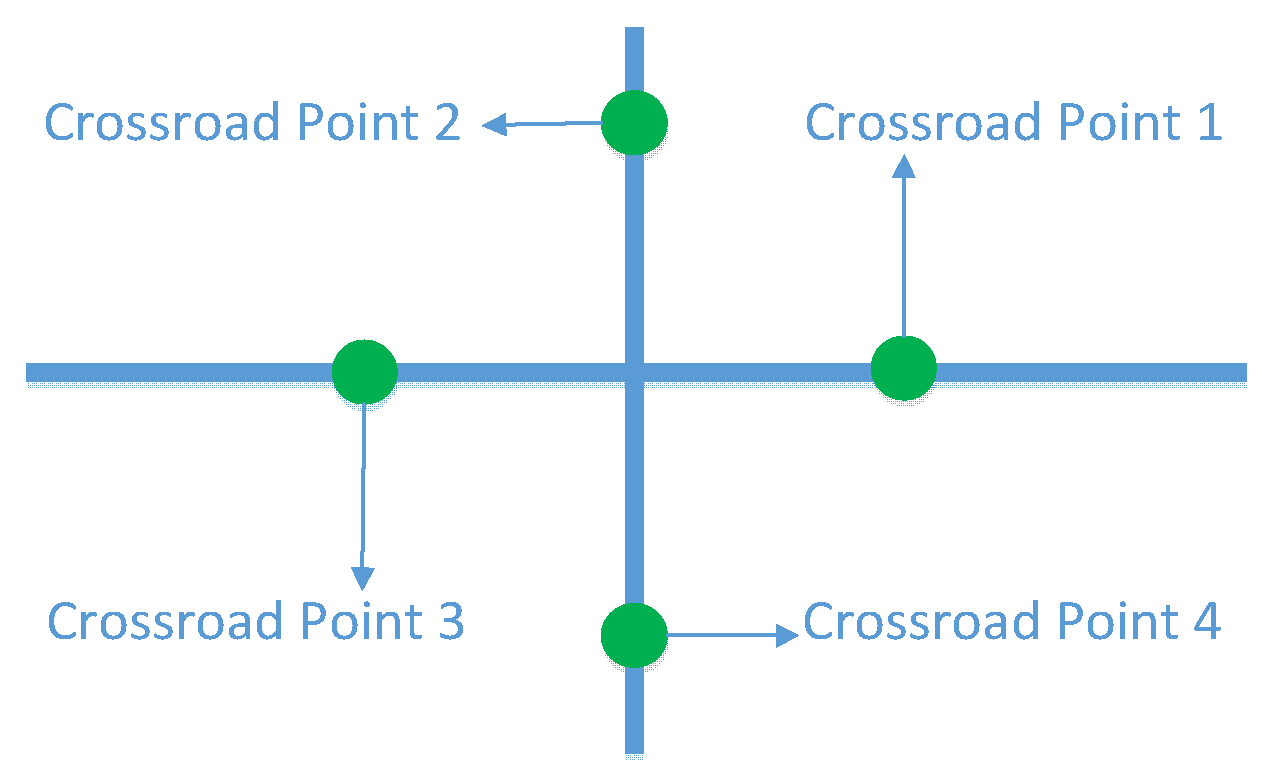
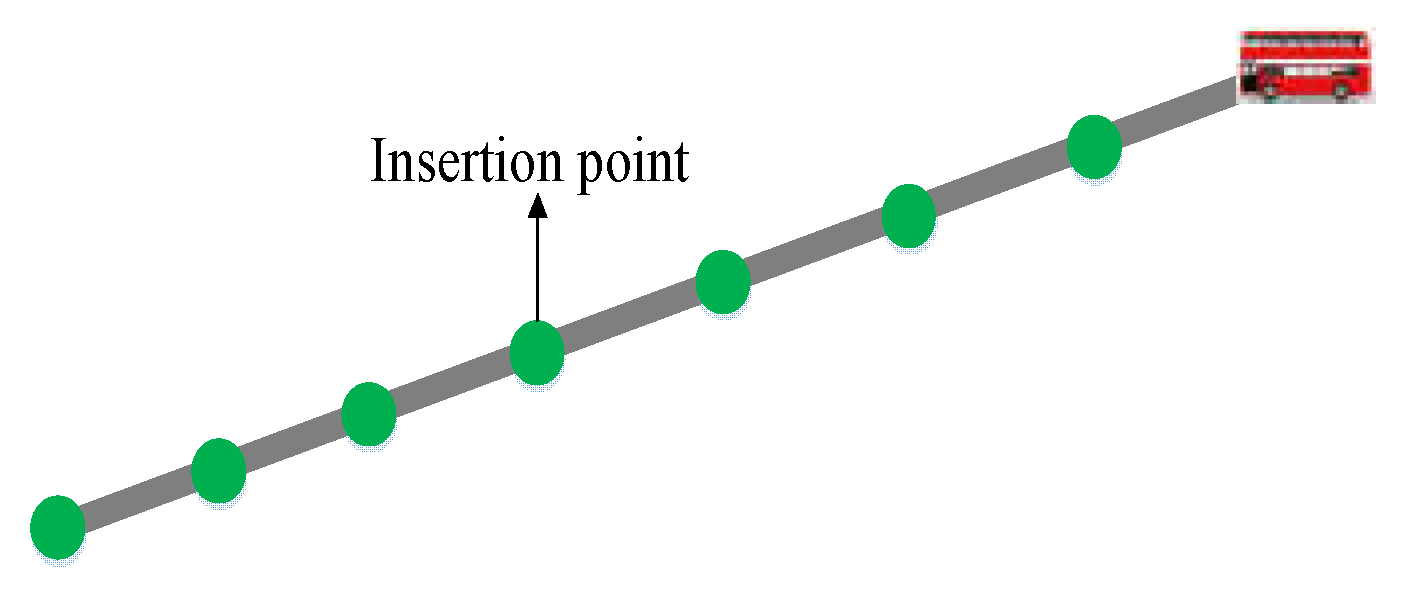
4.1. General Road Processing
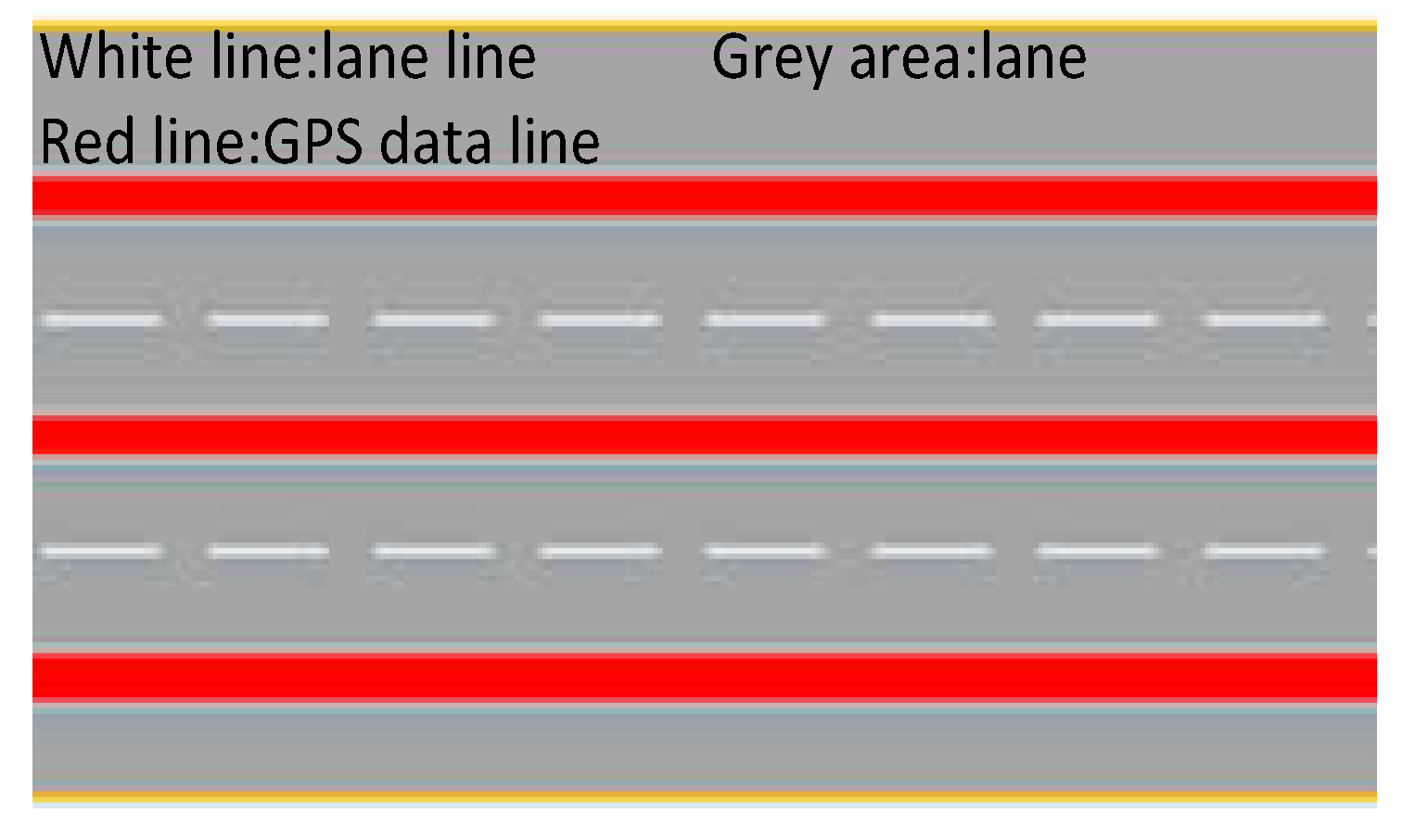
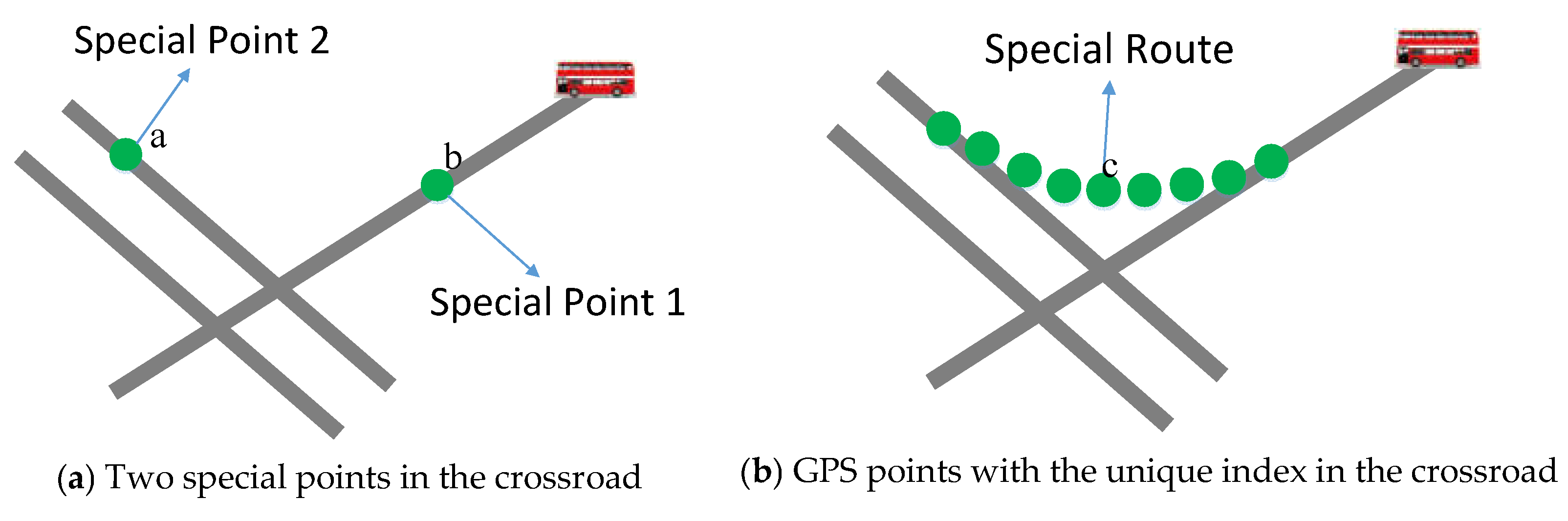
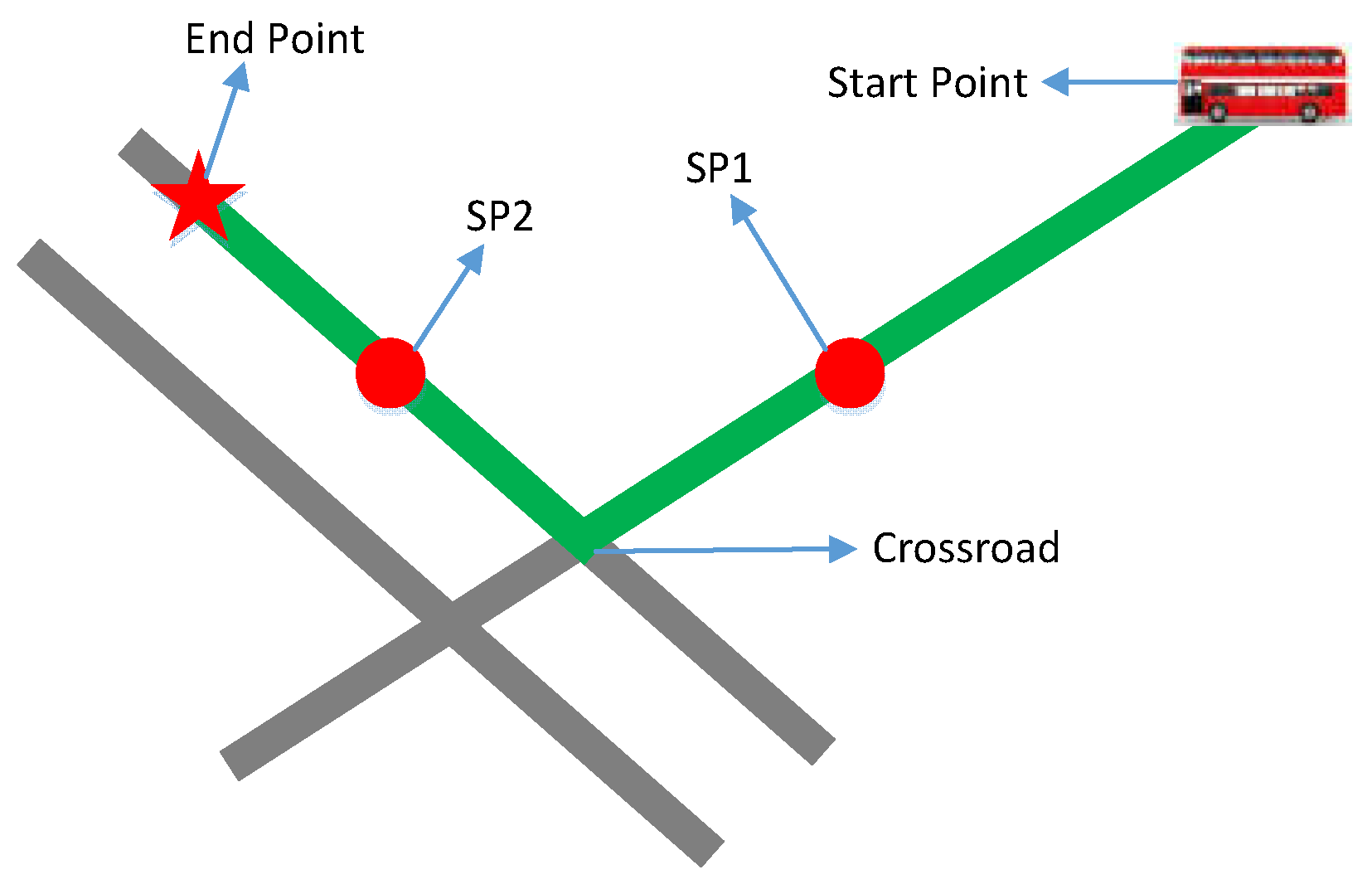
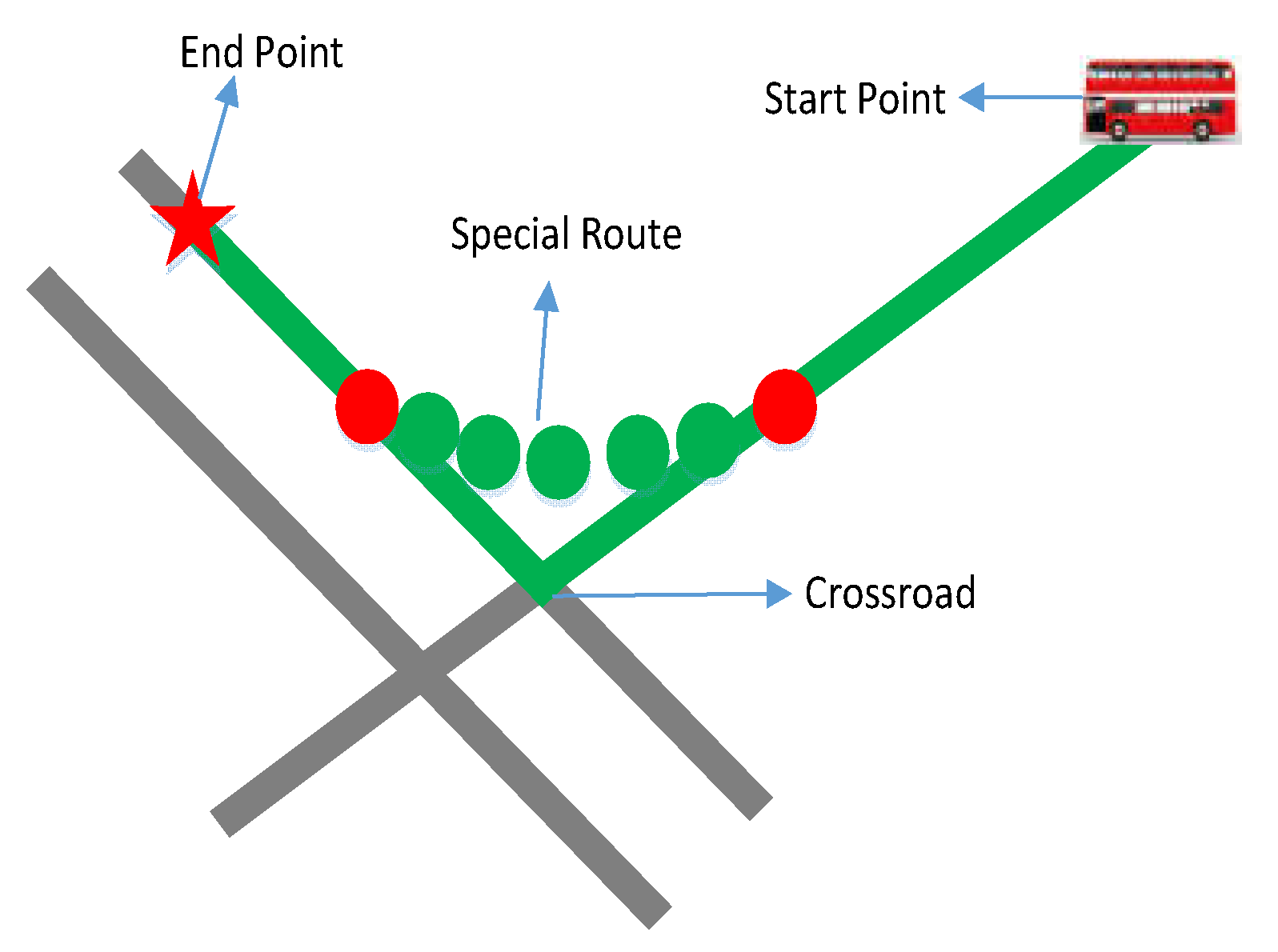
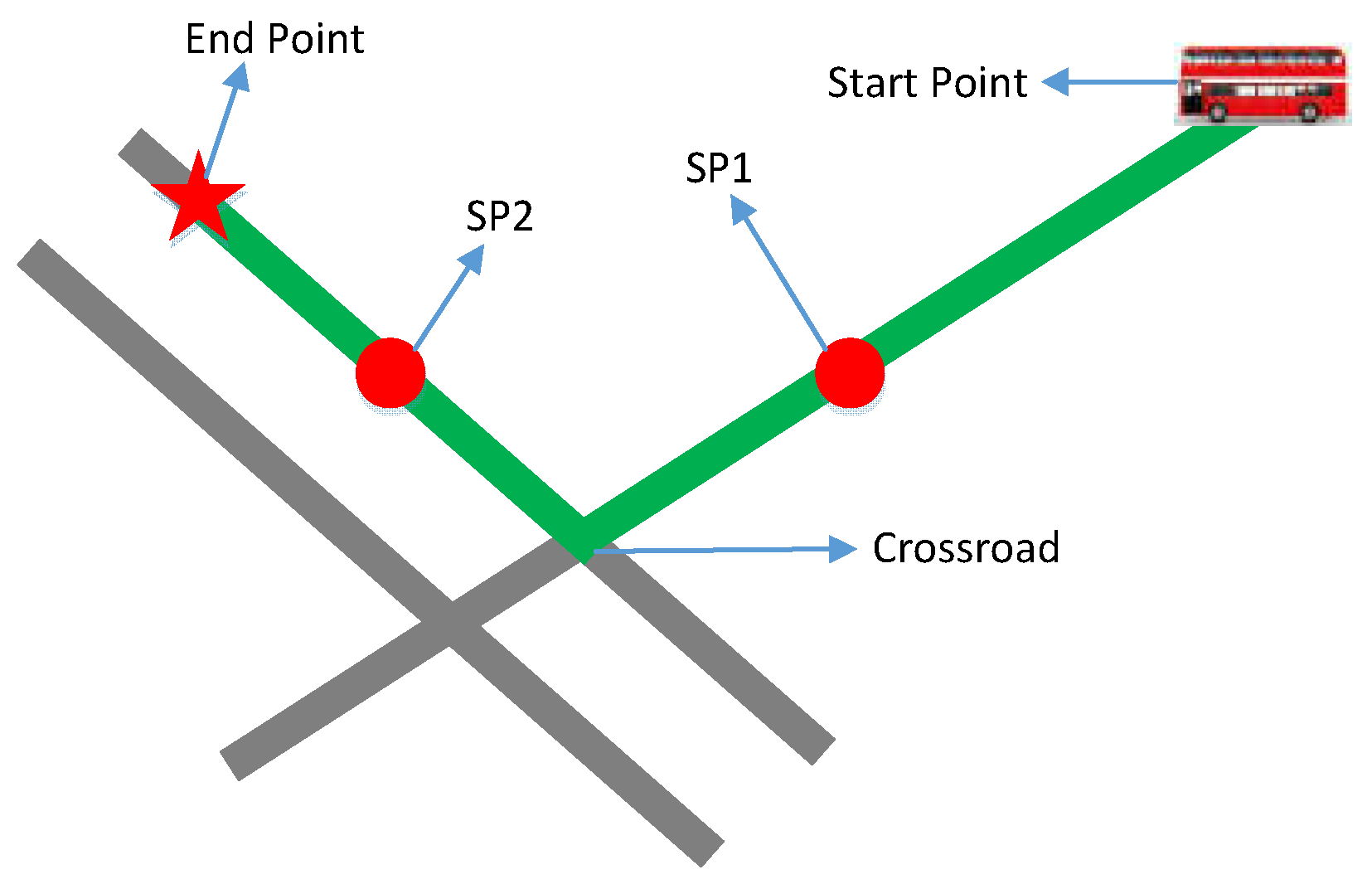
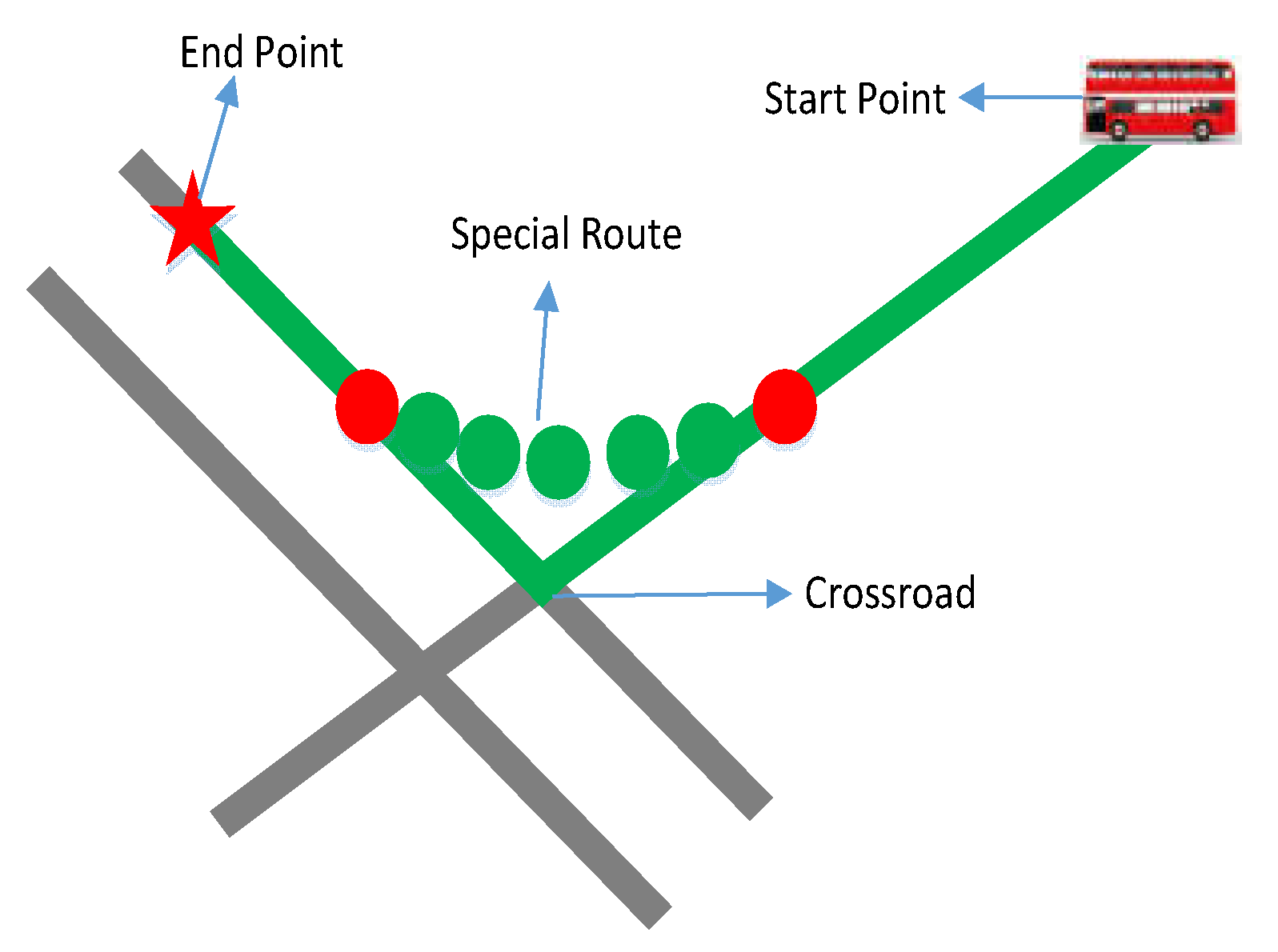
4.2. Special Road Processing
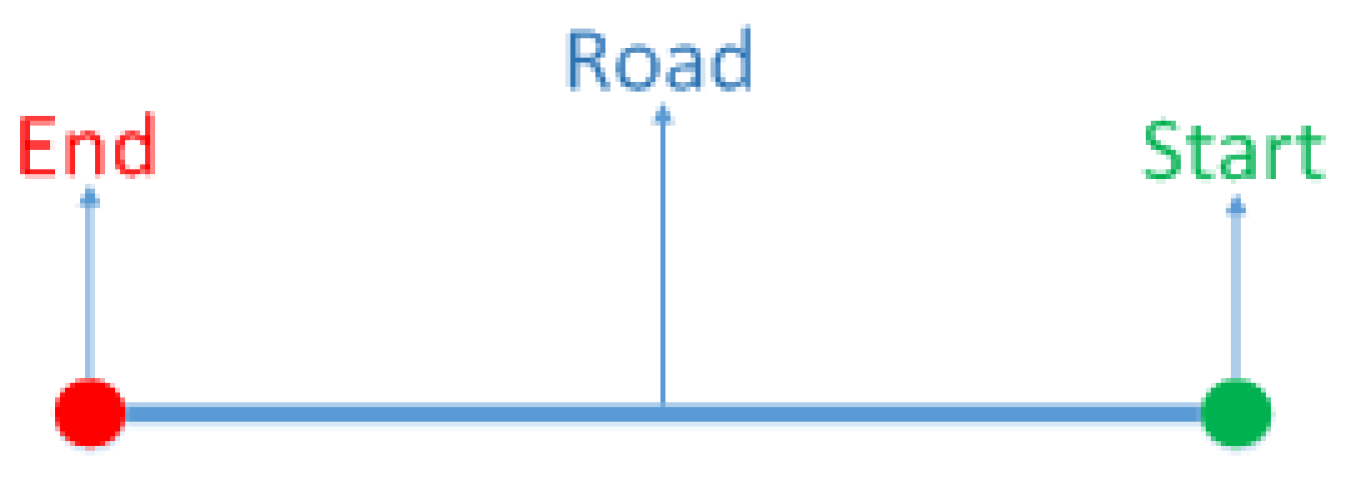
4.3. The Procedure of Coordinate System Conversion
5. Local Path Planning Based on JPS
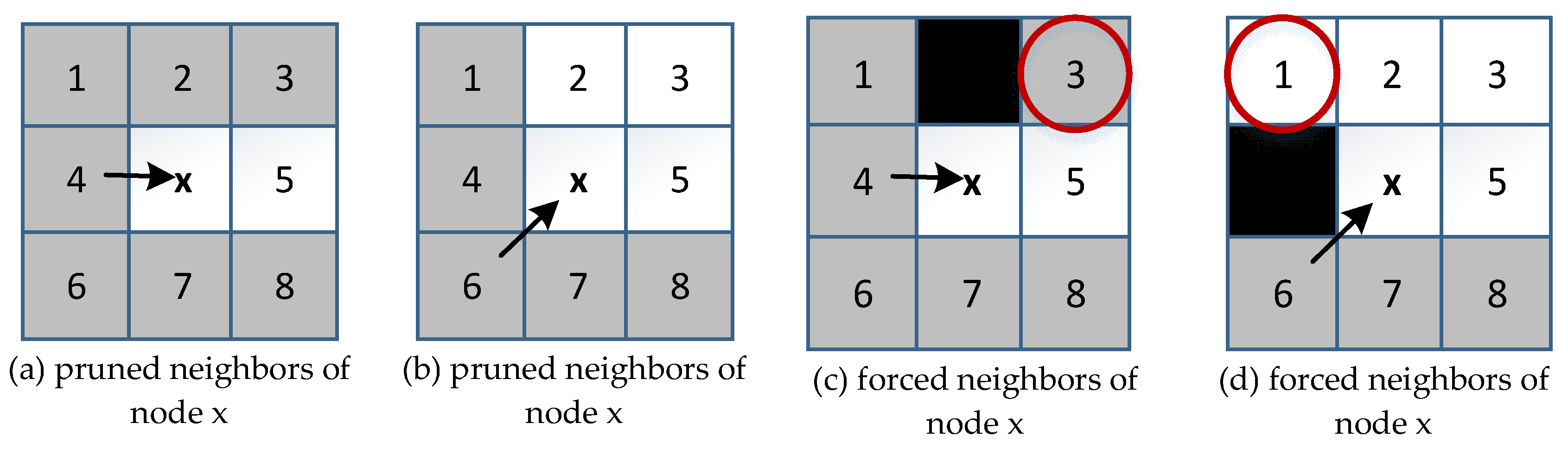
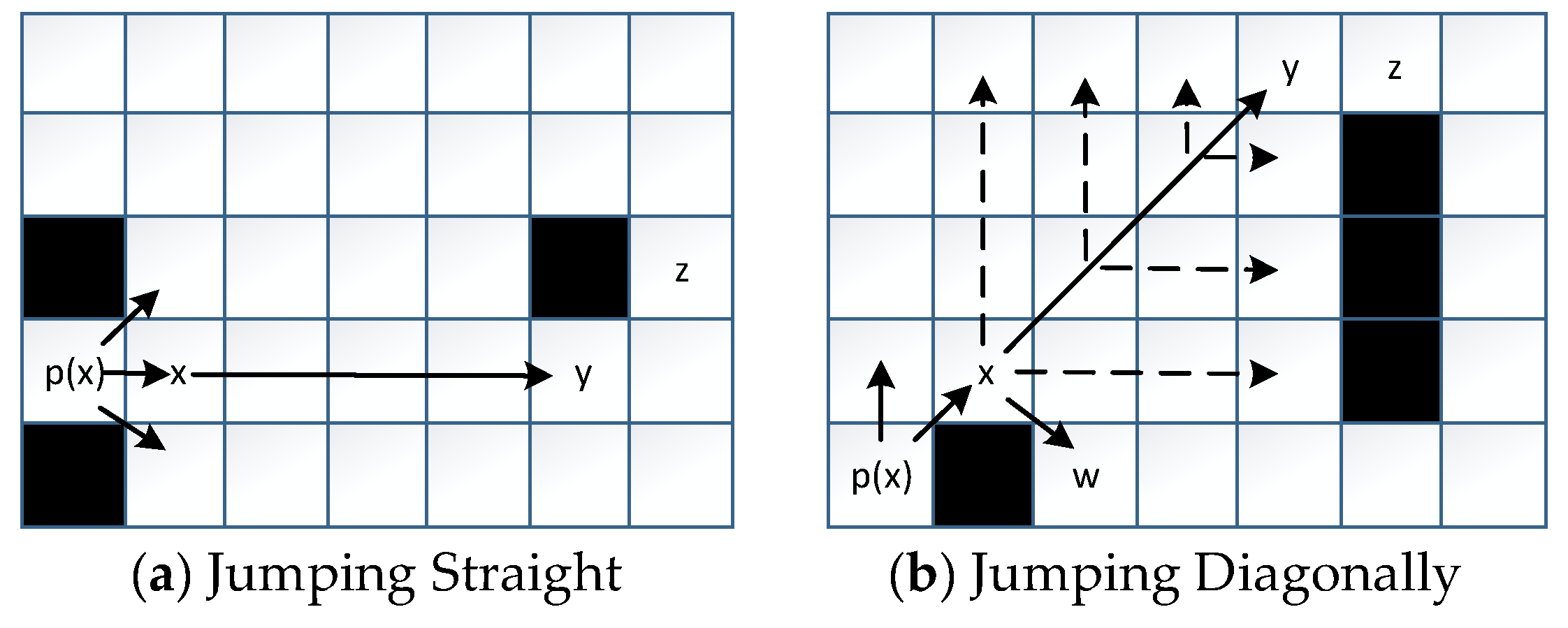
5.1. Jump Point Search (JPS)
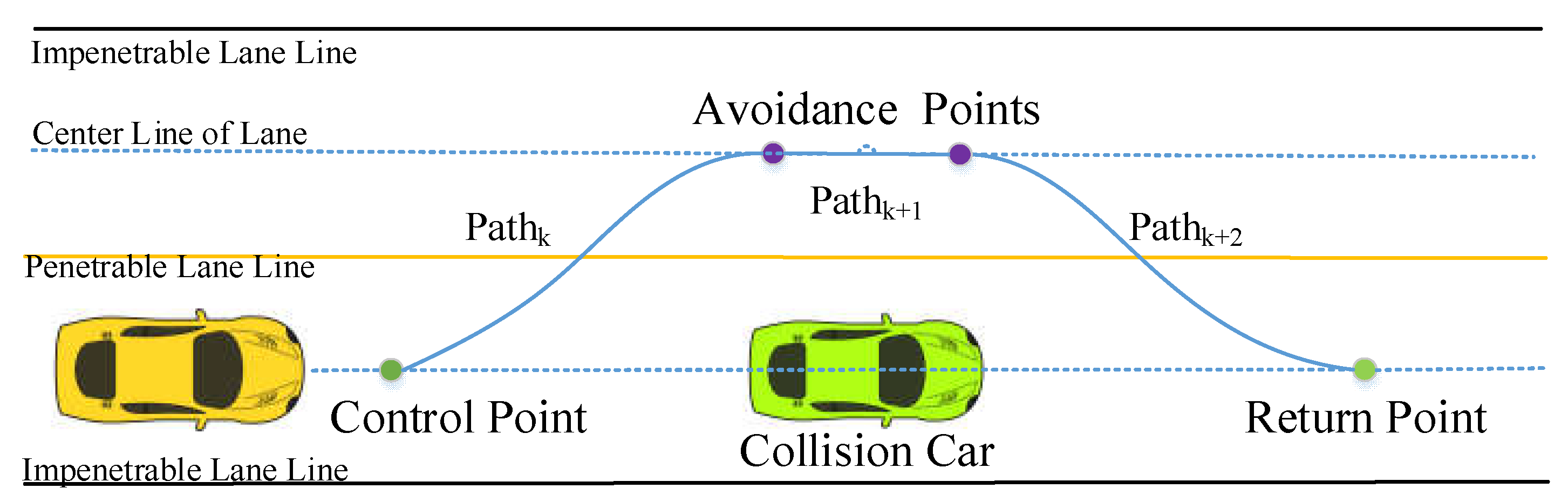
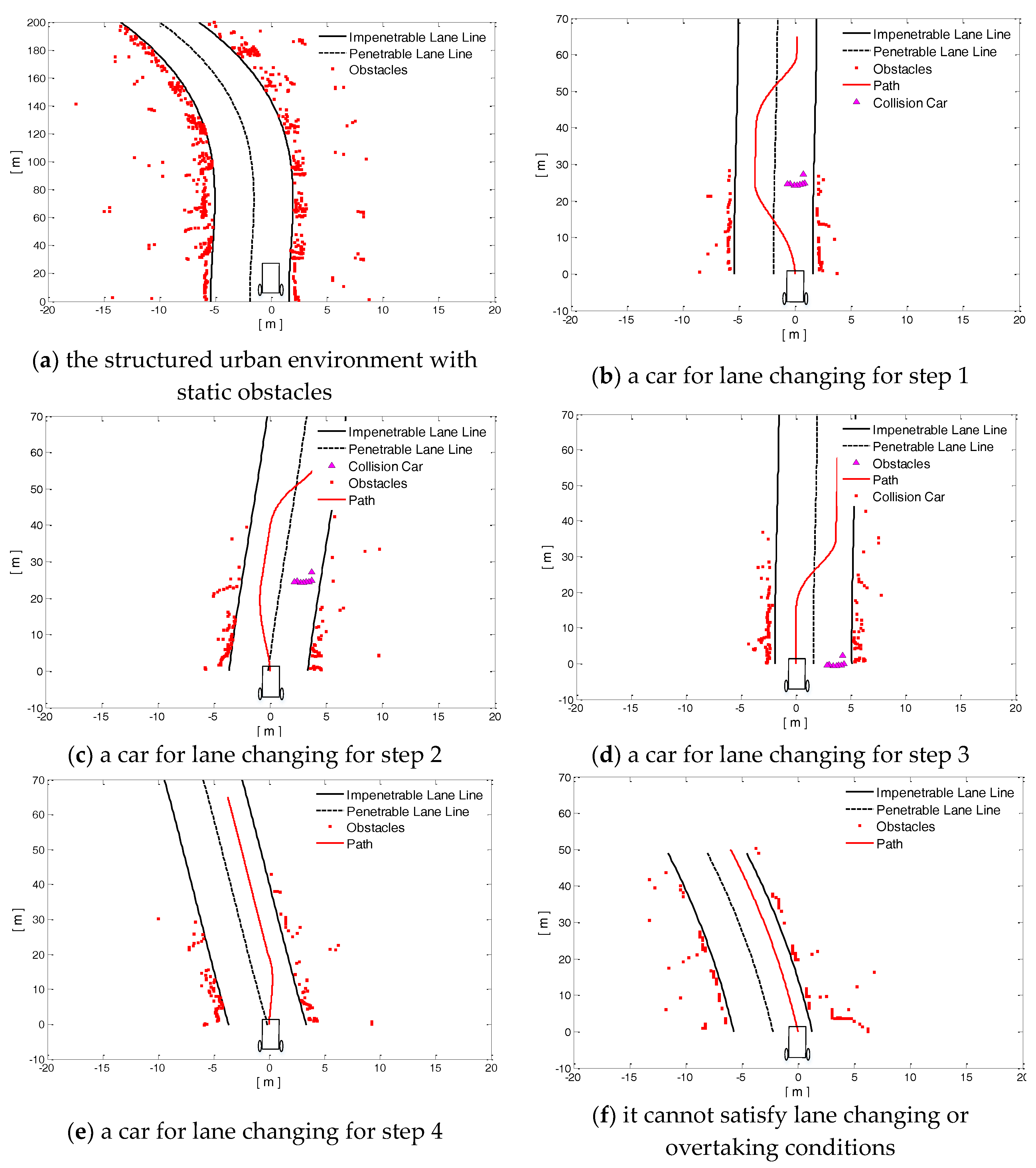
5.2. Collision Car Detection
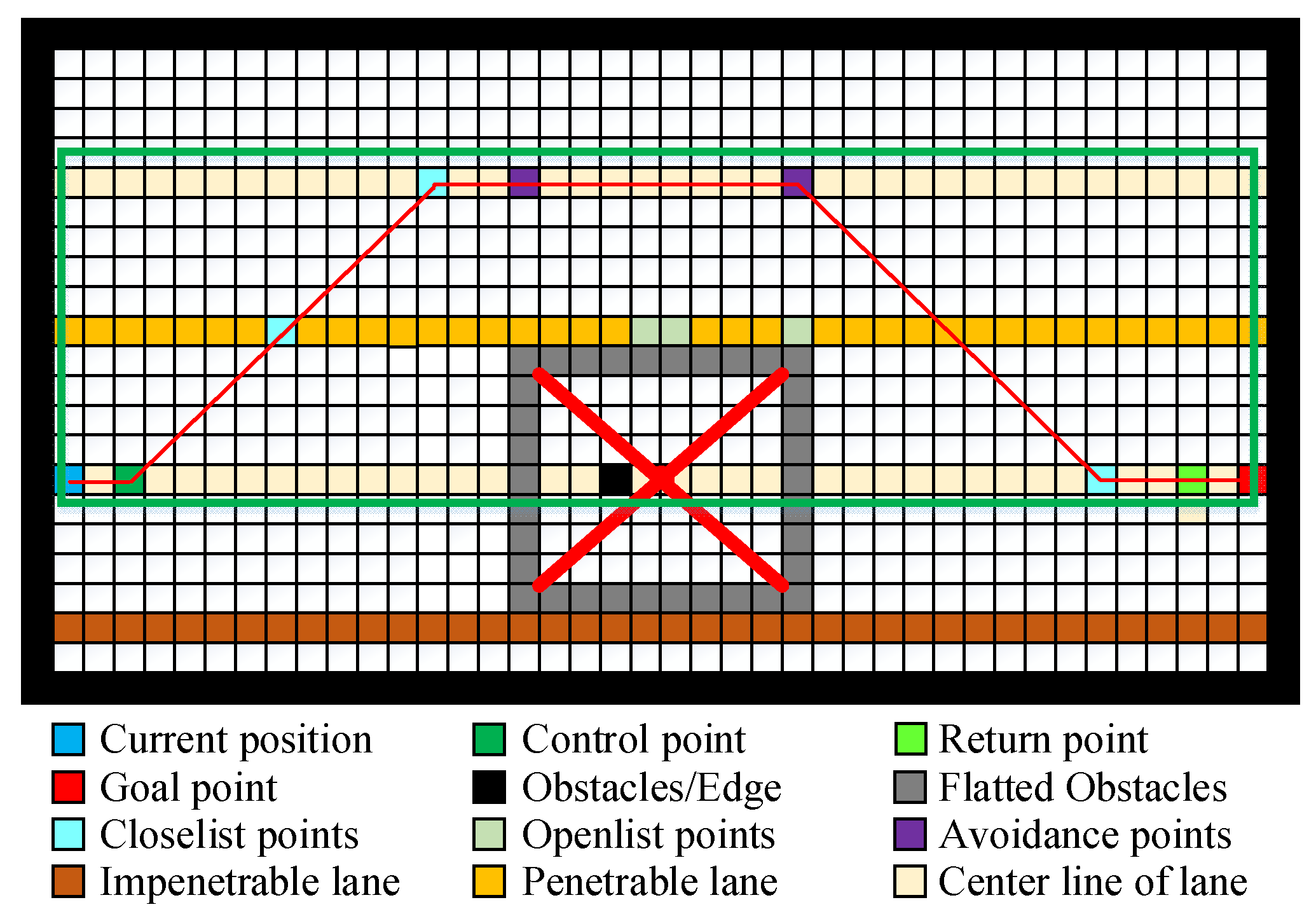
5.3. Path Generation Using JPS in Structured Urban Environment
5.4. Trajectory Generation by Bezier Curves
6. Simulation Experiments Analysis
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Rodriguez-Castaño, A.; Heredia, G.; Ollero, A. High-speed autonomous navigation system for heavy vehicles. Appl. Soft Comput. 2016, 43, 572–582. [Google Scholar] [CrossRef]
- Shi, L.; Prevedouros, P. Autonomous and Connected Cars: HCM Estimates for Freeways with Various Market Penetration Rates. Transp. Res. Procedia 2016, 15, 389–402. [Google Scholar] [CrossRef]
- Chen, Y.; Han, J.; Wu, H. Quadratic Programming-based Approach for Autonomous Vehicle Path Planning in Space. Chin. J. Mech. Eng. 2012, 25, 665–673. [Google Scholar] [CrossRef]
- Liu, X.; Xu, X.; Dai, B. Vision-based long-distance lane perception and front vehicle location for full autonomous vehicles on highway roads. J. Cent. South Univ. 2012, 19, 1454–1465. [Google Scholar] [CrossRef]
- Kutila, M.; Pyykönen, P.; Lybeck, A.; Niemi, P.; Nordin, E. Towards Autonomous Vehicles with Advanced Sensor Solutions. World J. Eng. Technol. 2015, 3, 6–17. [Google Scholar] [CrossRef]
- Pelusi, D.; Mascella, R.; Tallini, L.; Vazquez, L.; Diaz, D. Control of Drum Boiler dynamics via an optimized fuzzy controller. Int. J. Simul. Syst. Sci. Technol. 2016, 17, 22.1–22.7. [Google Scholar]
- Sun, N.; Han, G.; Duan, P.; Tan, J. A Global and Dynamitic Route Planning Application for Smart Transportation. In Proceedings of the International Conference on Computational Intelligence Theory, Systems and Applications (CCITSA), Yilan, Taiwan, 10–12 December 2015; pp. 203–208. [Google Scholar]
- Zhu, L.; Yin, D.; Shen, L.; Xiang, X.; Bai, G. Research on urban application-oriented route planning of UAV based on mobile communication network. In Proceedings of the International Conference on Computer Science and Network Technology (ICCSNT), Harbin, China, 19–20 December 2015; pp. 1562–1570. [Google Scholar]
- Wang, J.F.; Lv, J.; Wang, C.; Zhang, Z.Q. Dynamic Route Choice Prediction Model Based on Connected Vehicle Guidance Characteristics. J. Adv. Transp. 2017. [Google Scholar] [CrossRef]
- Guo, C.; Kidono, K.; Ogawa, M. Vision-Based Identification and Application of the Leader Vehicle in Urban Environment. In Proceedings of the IEEE International Conference on Intelligent Transportation Systems, Las Palmas, Spain, 15–18 September 2015; pp. 968–974. [Google Scholar]
- Zhu, H.; Fu, M.; Yang, Y.; Wang, X.; Wang, M. A path planning algorithm based on fusing lane and obstacle map. In Proceedings of the International IEEE Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 8–11 October 2014; pp. 1442–1448. [Google Scholar]
- Ma, Y.J.; Hou, W. Path planning method based on hierarchical hybrid algorithm. In Proceedings of the International Conference on Computer, Mechatronics, Control and Electronic Engineering, Changchun, China, 24–26 August 2010; pp. 74–77. [Google Scholar]
- Lidoris, G.; Rohrmuller, F.; Wollherr, D.; Buss, M. The Autonomous City Explorer (ACE) project—Mobile robot navigation in highly populated urban environments. In Proceedings of the IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 1416–1422. [Google Scholar]
- Ulrich, I.; Borenstein, J. VFH*: Local obstacle avoidance with look-ahead verification. In Proceedings of the IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 24–28 April 2000; Volume 3, pp. 2505–2511. [Google Scholar]
- Sun, F.; Huang, Y.; Yuan, J.; Kang, Y.; Ma, F. A Compound PRM Method for Path Planning of the Tractor-Trailer Mobile Robot. In Proceedings of the IEEE International Conference on Automation and Logistics, Jinan, China, 18–21 August 2007; pp. 1880–1885. [Google Scholar]
- Tian, Y.; Yan, L.; Park, G.Y.; Yang, S.H.; Kim, Y.S.; Lee, S.R.; Lee, C.Y. Application of RRT-based local Path Planning Algorithm in Unknown Environment. In Proceedings of the International Symposium on Computational Intelligence in Robotics and Automation, Jacksonville, FL, USA, 20–23 June 2007; pp. 456–460. [Google Scholar]
- Majumder, S.; Prasad, M.S. Three dimensional D* algorithm for incremental path planning in uncooperative environment. In Proceedings of the International Conference on Signal Processing and Integrated Networks (SPIN), Noida, India, 11–12 February 2016; pp. 431–435. [Google Scholar]
- Jiang, W.L.; Rong, X.; Jian, C. Sideslip-force based local path planning in complex and dynamic environment. J. Zhejiang Univ. 2007, 41, 1609–1614. [Google Scholar]
- Harabor, D.D.; Grastien, A. Online Graph Pruning for Pathfinding on Grid Maps. In Proceedings of the AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 7–11 August 2011; pp. 1114–1119. [Google Scholar]
- Harabor, D.; Grastien, A. Improving jump point search. In Proceedings of the Twenty-Fourth International Conference on Automated Planning and Scheduling, Portsmouth, NH, USA, 21–26 June 2014; pp. 128–135. [Google Scholar]
- Rabin, S.; Sturtevant, N.R. Combining Bounding Boxes and JPS to Prune Grid Pathfinding. In Proceedings of the AAAI Conference on Artificial Intelligence, Phoenix, AZ, USA, 12–17 February 2016; pp. 746–752. [Google Scholar]
- Aversa, D.; Sardina, S.; Vassos, S. Path planning with Inventory-driven Jump-Point-Search. In Proceedings of the AAAI Conference on Artificial Intelligence and Interactive Digital Entertainment (AIIDE), Santa Cruz, CA, USA, 14–18 November 2015; pp. 2–8. [Google Scholar]
- Jiang, K.; Yang, Y. Efficient dynamic pruning on largest scores first (LSF) retrieval. Front. Inf. Technol. Electron. Eng. 2016, 17, 1–14. [Google Scholar] [CrossRef]
- Khan, H.; Iqbal, J.; Baizid, K.; Zielinska, T. Longitudinal and lateral slip control of autonomous wheeled mobile robot for trajectory tracking. Front. Inf. Technol. Electron. Eng. 2015, 16, 166–172. [Google Scholar]
- Available online: http://www.esri.com/software/arcgis/arcgisengine (accessed on 23 August 2017).
- Available online: http://gisgeography.com/wgs84-world-geodetic-system/ (accessed on 23 August 2017).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
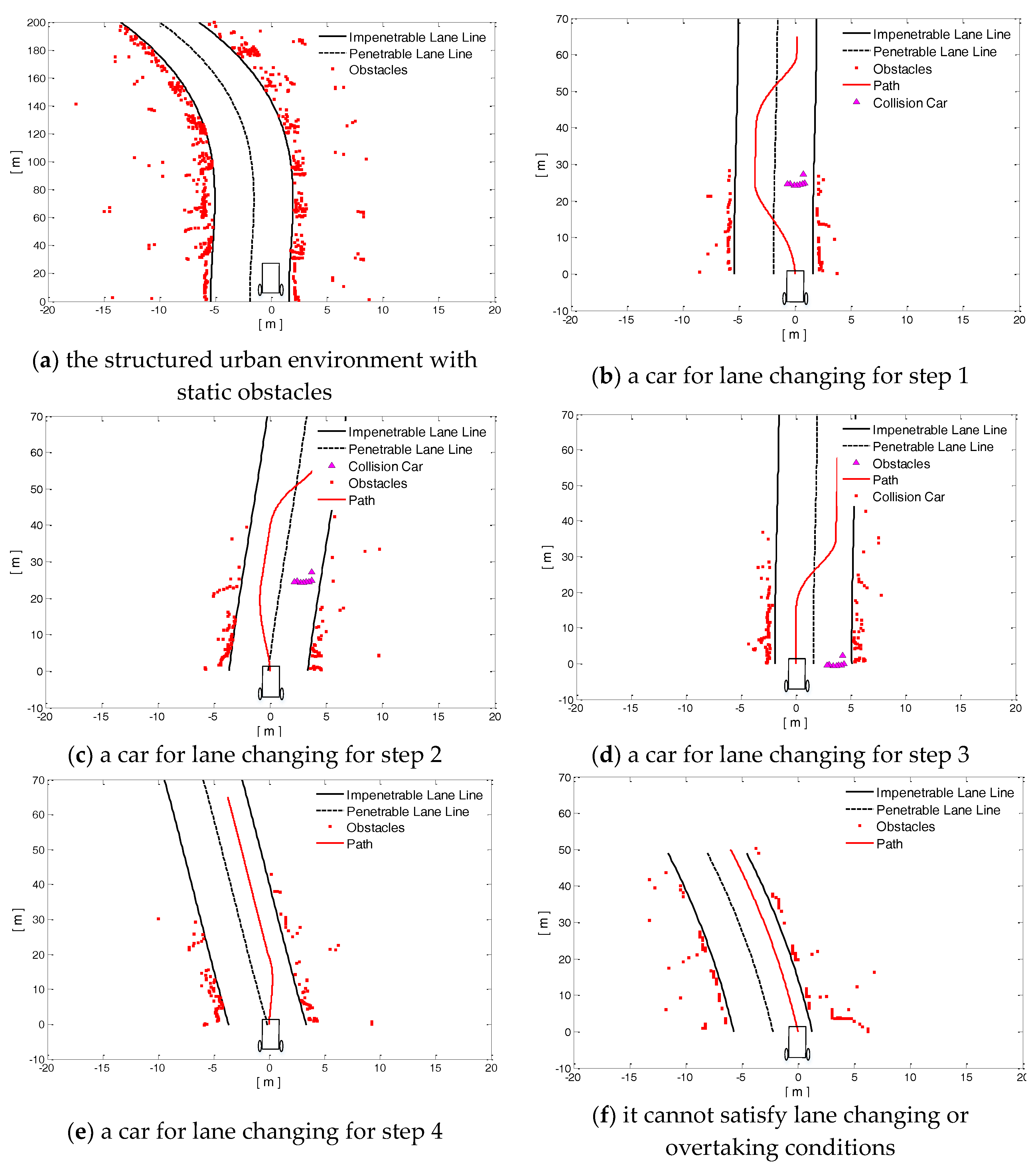
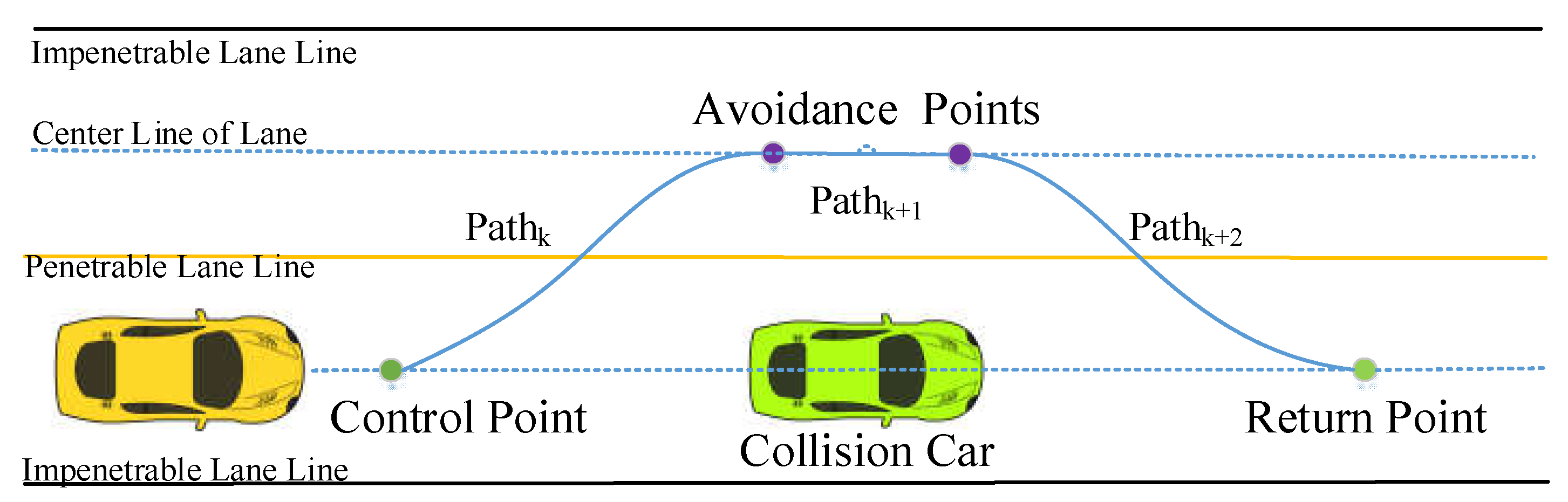
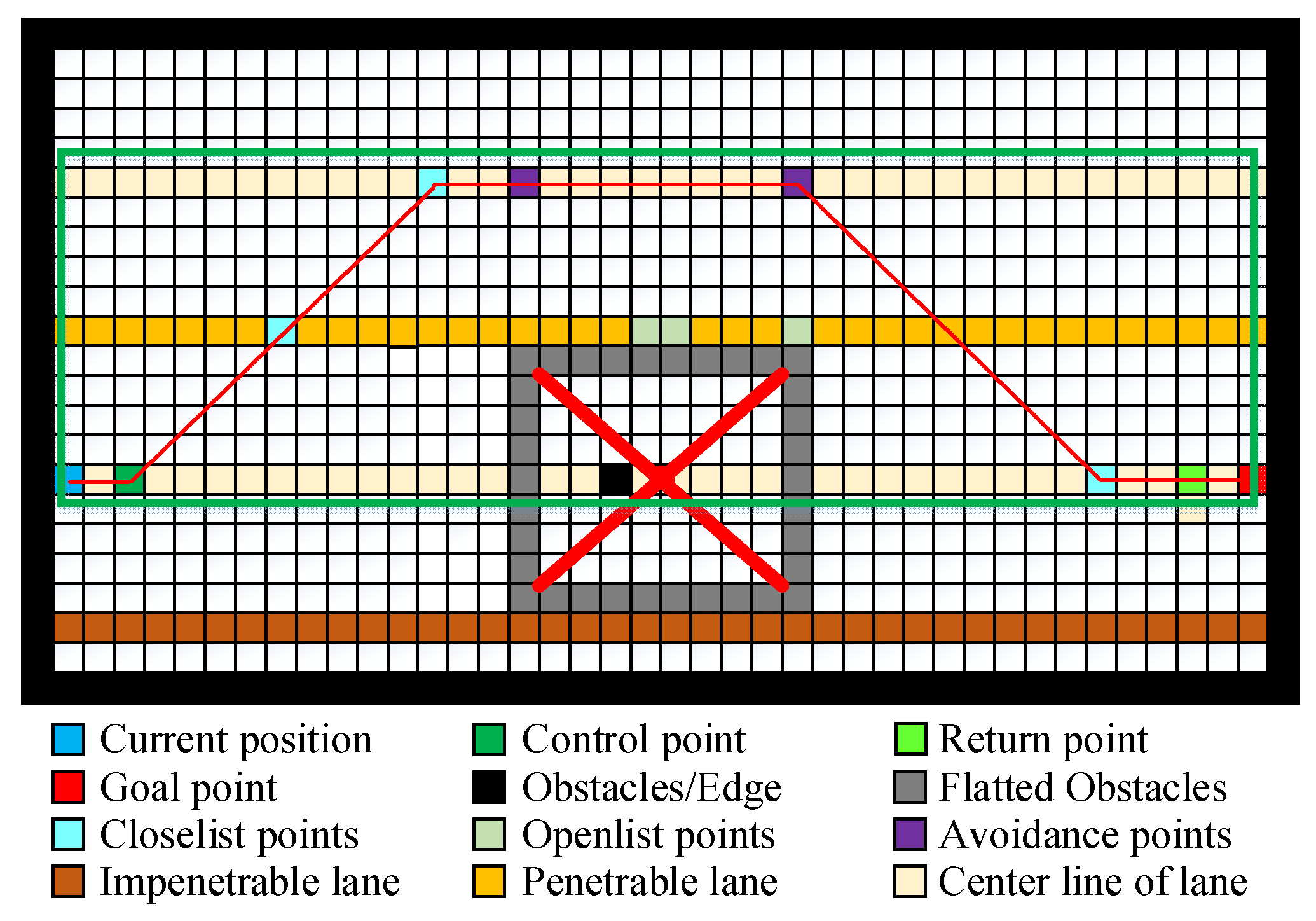
| Step1: Drive behavior decisions, meanwhile, detection of collision car includes two parts, one is detection from vehicle position to control point, the other is detection from control point to adjusted return point; |
| Step2: Structure of searching boundary and avoidance points in the structured urban environment; |
| Step3: Path generation with JPS in Section 4.3; |
| Step4: Trajectory smoothing with Bezier curves in Section 5.4. |
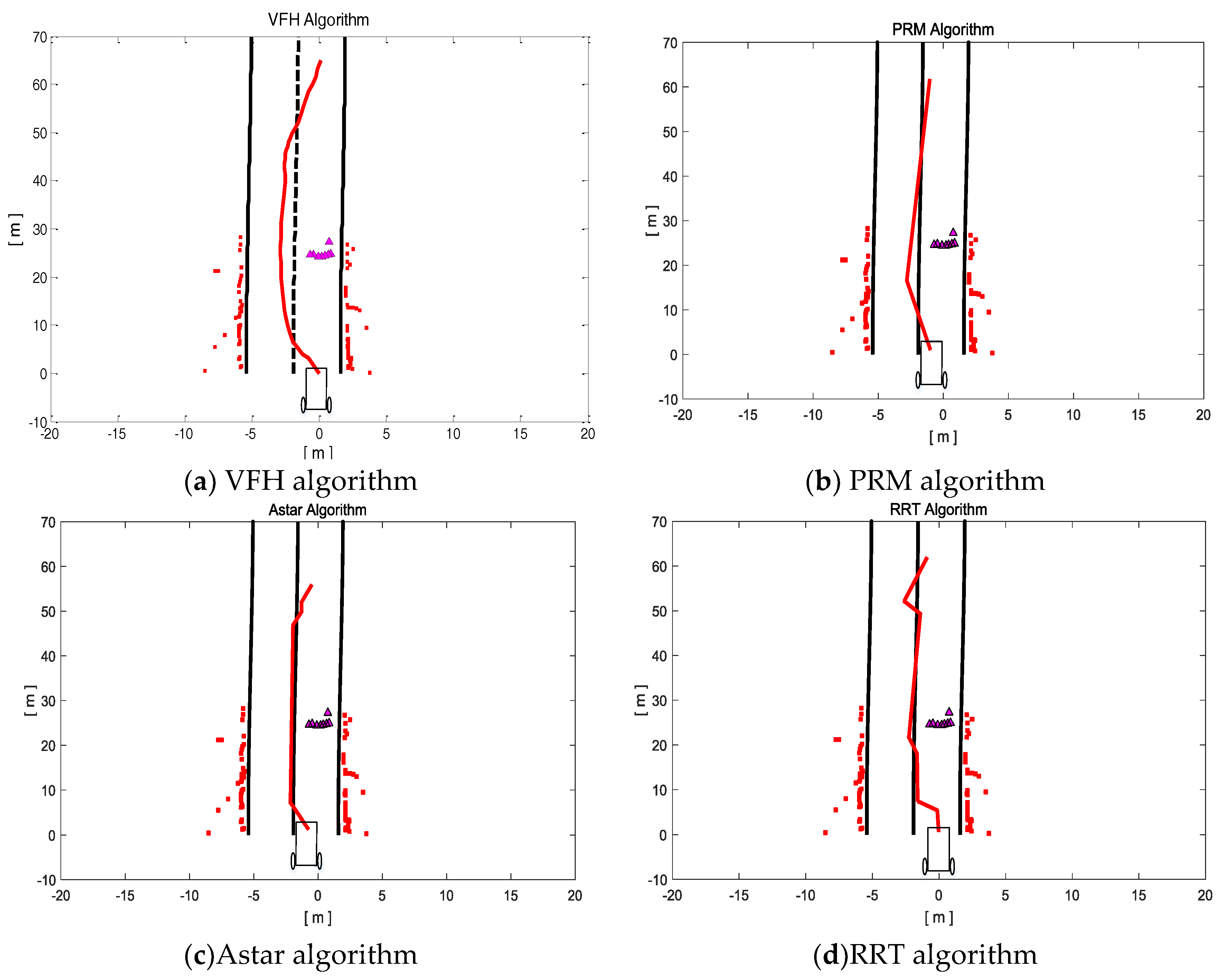
| Algorithm | Scene1 | Scene2 | Scene3 | Scene4 | Scene5 | Average |
|---|---|---|---|---|---|---|
| A* | 0.5226 | 0.4689 | 0.4241 | 0.4327 | 0.6288 | 0.8257 |
| JPS | 0.02113 | 0.01792 | 0.02003 | 0.0179 | 0.0259 | 0.02058 |
| PRM | 8.2568 | 6.2625 | 6.7503 | 7.0778 | 6.9995 | 7.0694 |
| VFH | 1.3215 | 1.0611 | 1.2958 | 1.0376 | 1.1192 | 1.1670 |
| RRT | 0.0900 | 0.1085 | 0.0703 | 0.0777 | 0.0834 | 0.0860 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, K.; Yu, L.; Long, Z.; Mo, S. Local Path Planning of Driverless Car Navigation Based on Jump Point Search Method Under Urban Environment. Future Internet 2017, 9, 51. https://doi.org/10.3390/fi9030051
Zhou K, Yu L, Long Z, Mo S. Local Path Planning of Driverless Car Navigation Based on Jump Point Search Method Under Urban Environment. Future Internet. 2017; 9(3):51. https://doi.org/10.3390/fi9030051
Chicago/Turabian StyleZhou, Kaijun, Lingli Yu, Ziwei Long, and Siyao Mo. 2017. "Local Path Planning of Driverless Car Navigation Based on Jump Point Search Method Under Urban Environment" Future Internet 9, no. 3: 51. https://doi.org/10.3390/fi9030051
APA StyleZhou, K., Yu, L., Long, Z., & Mo, S. (2017). Local Path Planning of Driverless Car Navigation Based on Jump Point Search Method Under Urban Environment. Future Internet, 9(3), 51. https://doi.org/10.3390/fi9030051