
Online Optimization of Pickup and Delivery Problem Considering Feasibility


Abstract
1. Introduction
- (i)
- For pickup and delivery problems, fuel constraints are introduced to utilize electric vehicles and drones as agents.
- (ii)
- A pickup and delivery problem considering demand forecasting is newly formulated.
- (iii)
- The effectiveness of the proposed method is clarified through a numerical example.
2. Pickup and Delivery Problem
2.1. Preliminaries
- : the set of vertices ();
- : the set of stores;
- : the set of customers;
- : the set of intermediate points between vertices;
- : the set of edges.
- : the store that received the order;
- : the customer who placed the order;
- : the time that the goods are available for pickup;
- : the time limit to complete the delivery.
2.2. Constraints
- Constraints on Agent Location: an agent can be located at only one vertex.
- Constraints on Agent Movement: an agent can move according to a given graph.
- Constraints on Orders: an order is assigned to an agent.
- Constraints on the Set of Orders: an agent must receive the goods before delivery and must deliver those until a certain time.
- Constraints on Agent Fuel: the fuel remaining for an agent must be equal to or greater than a certain value.
- Constraints on Luggage: the number of goods that an agent can handle once is constrained.
2.2.1. Constraints on Agent Location
2.2.2. Constraints on Agent Movement
2.2.3. Constraints on Orders
2.2.4. Constraints on the Set of Orders
2.2.5. Constraints on Agent Fuel
2.2.6. Constraints on Luggage
2.3. Demand Forecast
2.4. Problem Formulation
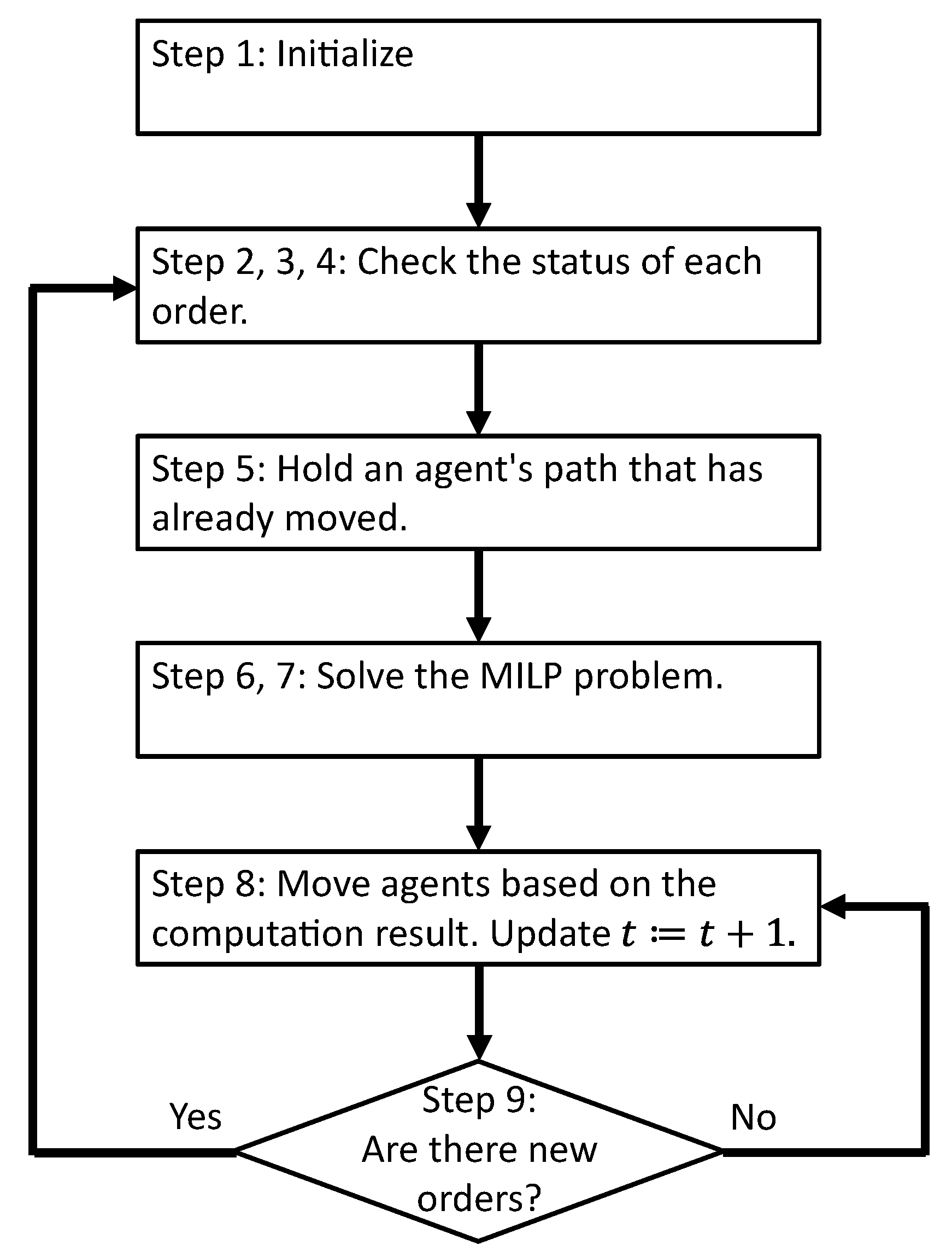
3. Online Optimization
- Step 1: If , set , and .
- Step 2: For each , calculate the values of and .
- Step 3: For , perform the following procedure.
- Step 4: Update .
- Step 5: For each order, if , then update to obtained via optimization at , that is,
- Step 6: For , impose Equations (10) and (11) as a constraint. For , impose (12) as a constraint.
- Step 7: Solve the pickup and delivery problem at time , adding the constraints in Equation (26).
- Step 8: Based on the calculation results, move the agent. Update .
- Step 9: If there are no orders at time t, return to Step 8. If there is an order, return to Step 2.
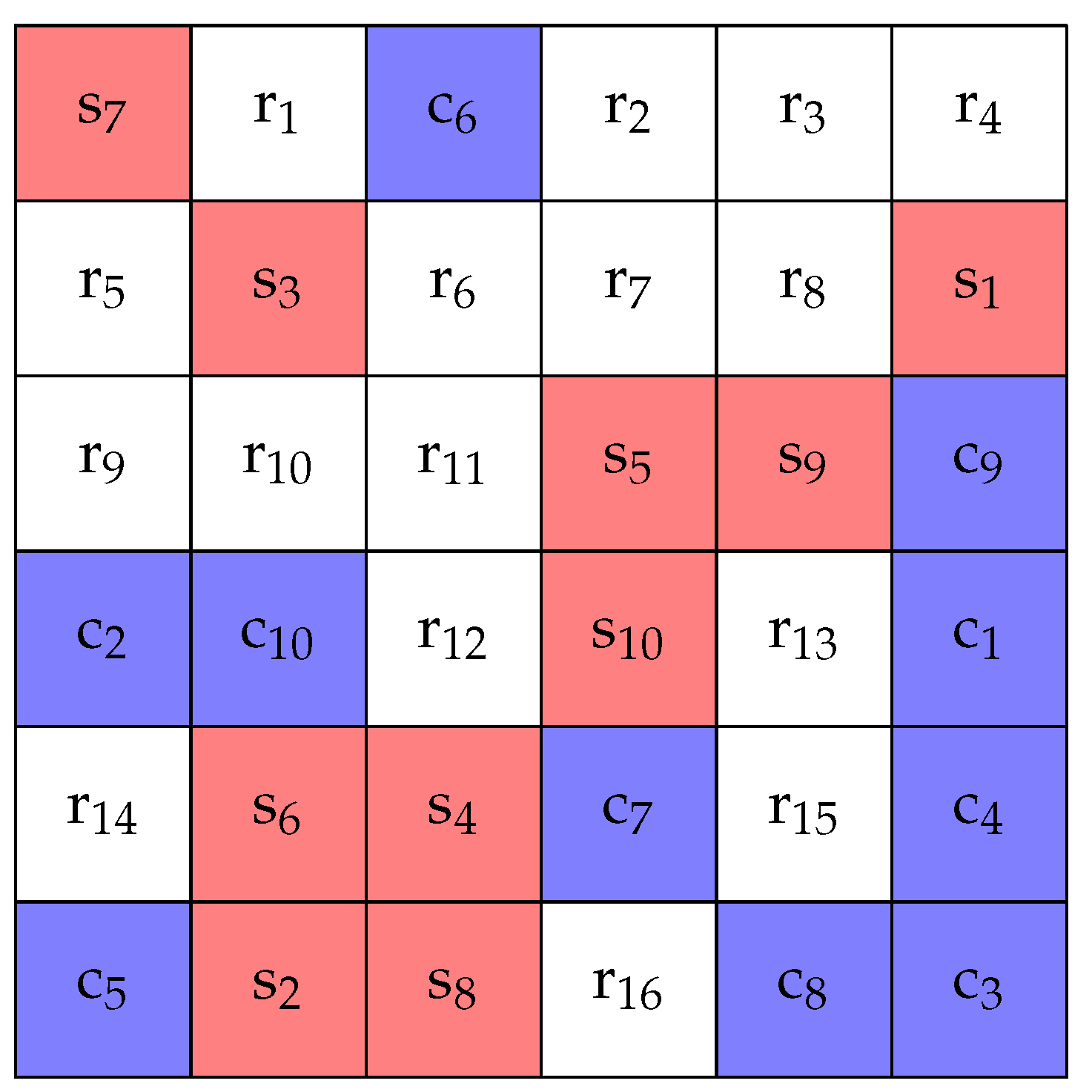
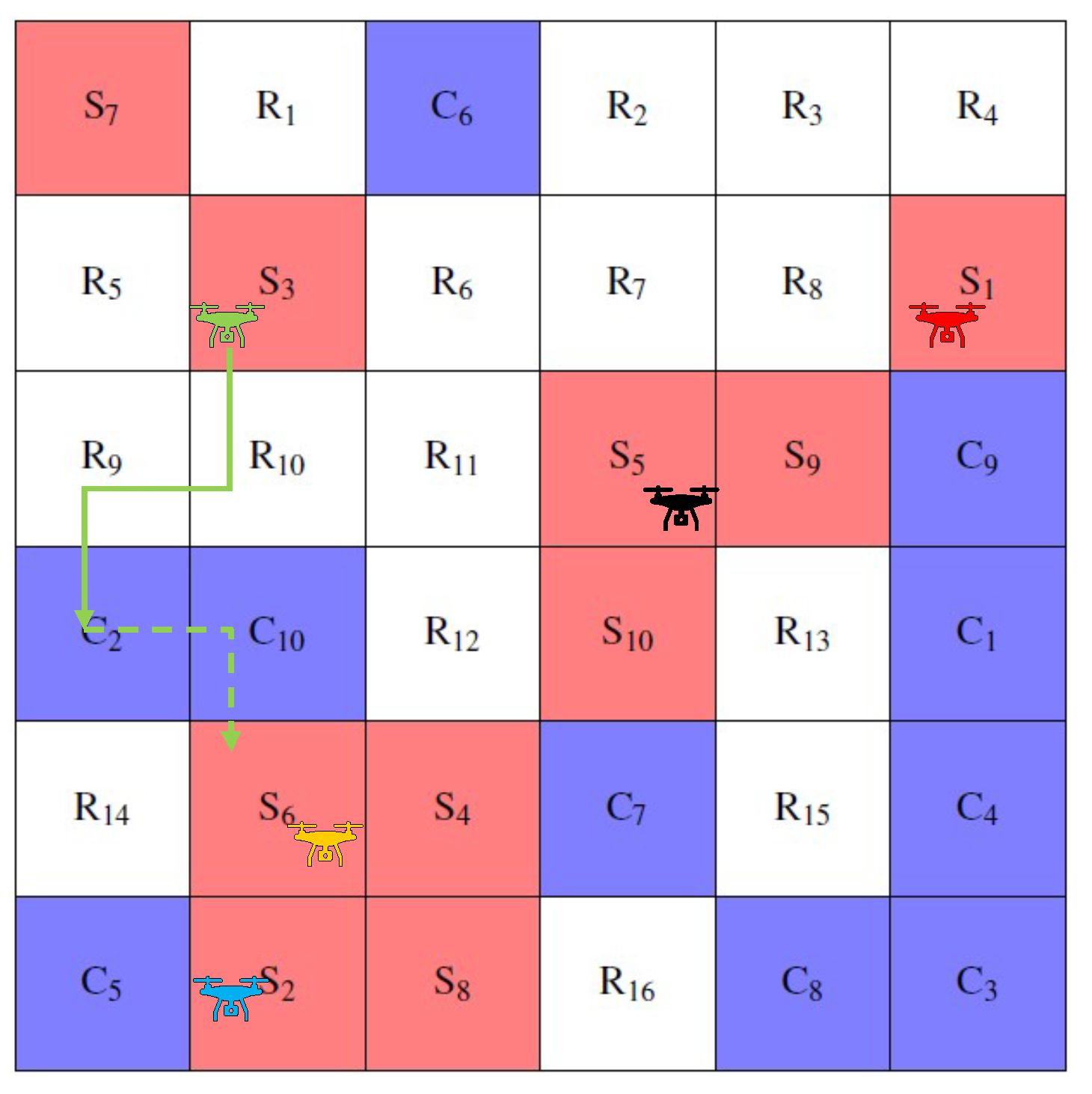
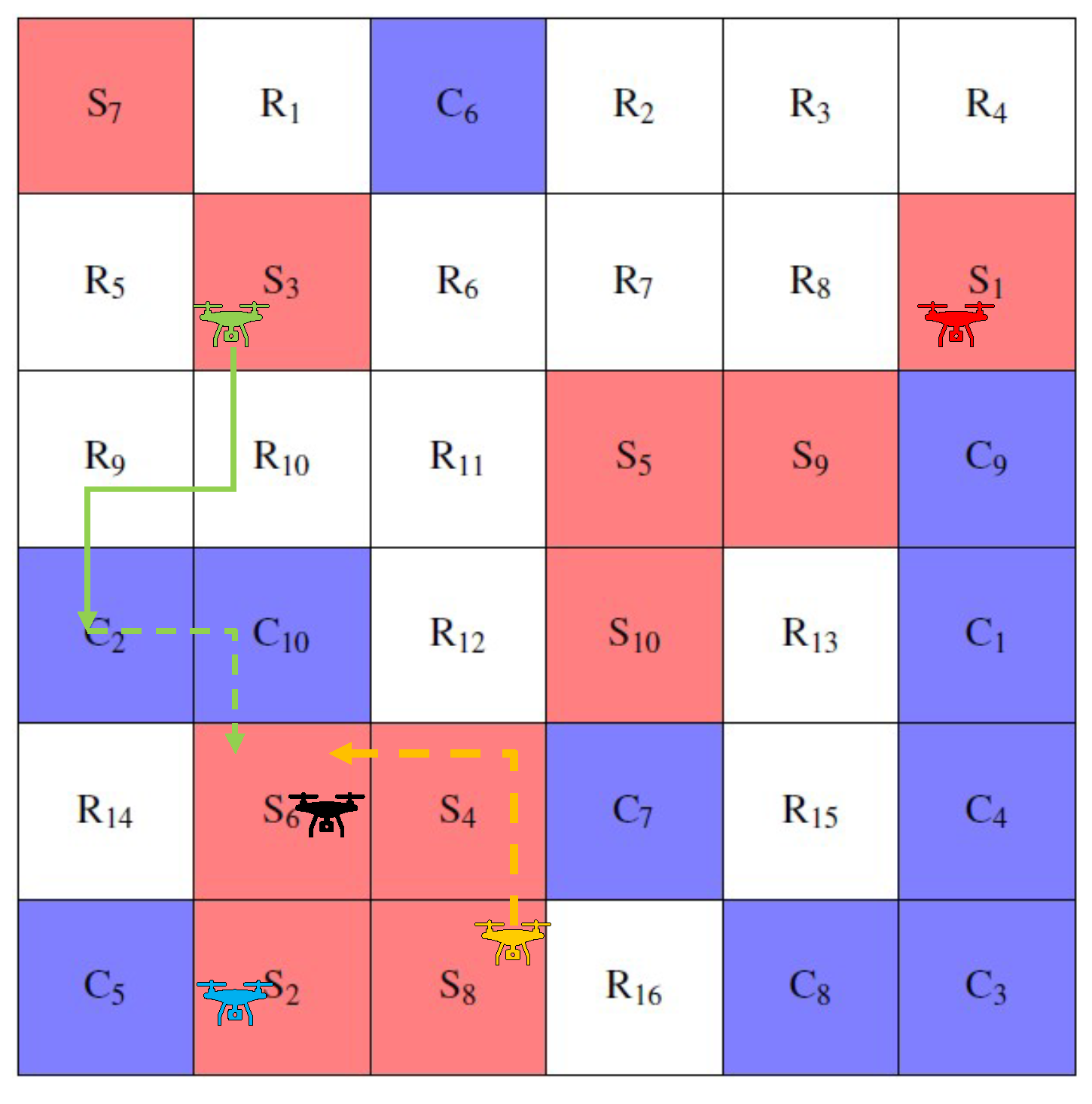
4. Numerical Example
4.1. Preliminaries
4.2. Calculation Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Cassandras, C.G. Smart cities as cyber-physical social systems. Engineering 2016, 2, 156–158. [Google Scholar] [CrossRef]
- Kloetzer, M.; Belta, C. Temporal logic planning and control of robotic swarms by hierarchical abstractions. IEEE Trans. Robot. 2007, 23, 320–330. [Google Scholar] [CrossRef]
- Kress-Gazit, H.; Fainekos, G.E.; Pappas, G.J. Temporal-logic-based reactive mission and motion planning. IEEE Trans. Robot. 2009, 25, 1370–1381. [Google Scholar] [CrossRef]
- Karaman, S.; Frazzoli, E. Linear temporal logic vehicle routing with applications to multi-UAV mission planning. Int. J. Robust Nonlinear Control 2011, 21, 1372–1395. [Google Scholar] [CrossRef]
- Ulusoy, A.; Smith, S.L.; Ding, X.C.; Belta, C. Robust multi-robot optimal path planning with temporal logic constraints. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 4693–4698. [Google Scholar]
- Ding, X.; Lazar, M.; Belta, C. LTL receding horizon control for finite deterministic systems. Automatica 2014, 50, 399–408. [Google Scholar] [CrossRef]
- Raman, V.; Donzé, A.; Maasoumy, M.; Murray, R.M.; Sangiovanni-Vincentelli, A.; Seshia, S.A. Model predictive control with signal temporal logic specifications. In Proceedings of the 53rd IEEE Conference on Decision and Control, Los Angeles, CA, USA, 15–17 December 2014; pp. 81–87. [Google Scholar]
- Aksaray, D.; Leahy, K.; Belta, C. Distributed multi-agent persistent surveillance under temporal logic constraints. IFAC-PapersOnLine 2015, 48, 174–179. [Google Scholar] [CrossRef]
- Kobayashi, K.; Nagami, T.; Hiraishi, K. Optimal control of multi-vehicle systems with temporal logic constraints. IEICE Trans. Fundam. Electron. Commun. Comput. Sci. 2015, E98-A, 626–634. [Google Scholar] [CrossRef]
- Tumova, J.; Dimarogonas, D.V. Multi-agent planning under local LTL specifications and event-based synchronization. Automatica 2016, 70, 239–248. [Google Scholar] [CrossRef]
- Schillinger, P.; Bürger, M.; Dimarogonas, D.V. Simultaneous task allocation and planning for temporal logic goals in heterogeneous multi-robot systems. Int. J. Robot. Res. 2018, 37, 818–838. [Google Scholar] [CrossRef]
- Fujita, K.; Ushio, T. Optimal control of timed Petri nets under temporal logic constraints with generalized mutual exclusion. IEICE Trans. Fundam. Electron. Commun. Comput. Sci. 2022, 105, 808–815. [Google Scholar] [CrossRef]
- Fujita, K.; Ushio, T. Optimal Control of Colored Timed Petri Nets Under Generalized Mutual Exclusion Temporal Constraints. IEEE Access 2022, 10, 110849–110861. [Google Scholar] [CrossRef]
- Kinugawa, T.; Ushio, T. Finite-Horizon Optimal Spatio-Temporal Pattern Control under Spatio-Temporal Logic Specifications. IEICE Trans. Inf. Syst. 2022, 105, 1658–1664. [Google Scholar] [CrossRef]
- Oura, R.; Sakakibara, A.; Ushio, T. Reinforcement learning of control policy for linear temporal logic specifications using limit-deterministic generalized Büchi automata. IEEE Control Syst. Lett. 2020, 4, 761–766. [Google Scholar] [CrossRef]
- Terashima, K.; Kobayashi, K.; Yamashita, Y. Reinforcement Learning for Multi-Agent Systems with Temporal Logic Specifications. IEICE Trans. Fundam. Electron. Commun. Comput. Sci. 2024, E107-A, 31–37. [Google Scholar] [CrossRef]
- Beard, R.W.; McLain, T.W.; Nelson, D.B.; Kingston, D.; Johanson, D. Decentralized cooperative aerial surveillance using fixed-wing miniature UAVs. Proc. IEEE 2006, 94, 1306–1324. [Google Scholar] [CrossRef]
- Nigam, N.; Kroo, I. Persistent surveillance using multiple unmanned air vehicles. In Proceedings of the 2008 IEEE Aerospace Conference, Orlando, FL, USA, 27–29 October 2008; pp. 1–14. [Google Scholar]
- Elmaliach, Y.; Agmon, N.; Kaminka, G.A. Multi-robot area patrol under frequency constraints. Ann. Math. Artif. Intell. 2009, 57, 293–320. [Google Scholar] [CrossRef]
- Fu, J.G.M.; Ang, M.H. Probabilistic ants (PAnts) in multi-agent patrolling. In Proceedings of the 2009 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Singapore, 14–17 July 2009; pp. 1371–1376. [Google Scholar]
- Di Paola, D.; Naso, D.; Turchiano, B.; Cicirelli, G.; Distante, A. Matrix-based discrete event control for surveillance mobile robotics. J. Intell. Robot. Syst. 2009, 56, 513–541. [Google Scholar] [CrossRef]
- Ding, X.C.; Belta, C.; Cassandras, C.G. Receding horizon surveillance with temporal logic specifications. In Proceedings of the 49th IEEE Conference on Decision and Control (CDC), Atlanta, GA, USA, 15–17 December 2010; pp. 256–261. [Google Scholar]
- Nigam, N.; Bieniawski, S.; Kroo, I.; Vian, J. Control of multiple UAVs for persistent surveillance: Algorithm and flight test results. IEEE Trans. Control Syst. Technol. 2011, 20, 1236–1251. [Google Scholar] [CrossRef]
- Pasqualetti, F.; Franchi, A.; Bullo, F. On cooperative patrolling: Optimal trajectories, complexity analysis, and approximation algorithms. IEEE Trans. Robot. 2012, 28, 592–606. [Google Scholar] [CrossRef]
- Lin, X.; Cassandras, C.G. An optimal control approach to the multi-agent persistent monitoring problem in two-dimensional spaces. IEEE Trans. Autom. Control 2014, 60, 1659–1664. [Google Scholar] [CrossRef]
- Kajita, K.; Konaka, E. Hard-to-predict routing algorithm from intruders for autonomous surveillance robots. In Proceedings of the IECON 2018-44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 2540–2545. [Google Scholar]
- Masuda, R.; Kobayashi, K.; Yamashita, Y. Dynamic Surveillance by Multiple Agents with Fuel Constraints. IEICE Trans. Fundam. Electron. Commun. Comput. Sci. 2020, E103-A, 462–468. [Google Scholar] [CrossRef]
- Zuo, Y.; Tharmarasa, R.; Jassemi-Zargani, R.; Kashyap, N.; Thiyagalingam, J.; Kirubarajan, T.T. MILP formulation for aircraft path planning in persistent surveillance. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 3796–3811. [Google Scholar] [CrossRef]
- Mayne, D.Q.; Rawlings, J.B.; Rao, C.V.; Scokaert, P.O. Constrained model predictive control: Stability and optimality. Automatica 2000, 36, 789–814. [Google Scholar] [CrossRef]
- Mayne, D.Q. Model predictive control: Recent developments and future promise. Automatica 2014, 50, 2967–2986. [Google Scholar] [CrossRef]
- Xie, R.; Meng, Z.; Wang, L.; Li, H.; Wang, K.; Wu, Z. Unmanned aerial vehicle path planning algorithm based on deep reinforcement learning in large-scale and dynamic environments. IEEE Access 2021, 9, 24884–24900. [Google Scholar] [CrossRef]
- Liu, Y.; Vogiatzis, C.; Yoshida, R.; Morman, E. Solving reward-collecting problems with UAVs: A comparison of online optimization and Q-learning. J. Intell. Robot. Syst. 2022, 104, 35. [Google Scholar] [CrossRef]
- Dumas, Y.; Desrosiers, J.; Soumis, F. The pickup and delivery problem with time windows. Eur. J. Oper. Res. 1991, 54, 7–22. [Google Scholar] [CrossRef]
- Baker, B.M.; Ayechew, M. A genetic algorithm for the vehicle routing problem. Comput. Oper. Res. 2003, 30, 787–800. [Google Scholar] [CrossRef]
- Parragh, S.N.; Doerner, K.F.; Hartl, R.F. A survey on pickup and delivery problems: Part I: Transportation between customers and depot. J. Betriebswirtschaft 2008, 58, 21–51. [Google Scholar] [CrossRef]
- Salzman, O.; Stern, R. Research challenges and opportunities in multi-agent path finding and multi-agent pickup and delivery problems. In Proceedings of the 19th International Conference on Autonomous Agents and MultiAgent Systems, Auckland, New Zealand, 9–13 May 2020; pp. 1711–1715. [Google Scholar]
- Sun, P.; Veelenturf, L.P.; Hewitt, M.; Van Woensel, T. Adaptive large neighborhood search for the time-dependent profitable pickup and delivery problem with time windows. Transp. Res. Part E Logist. Transp. Rev. 2020, 138, 101942. [Google Scholar] [CrossRef]
- Koç, Ç.; Laporte, G.; Tükenmez, İ. A review of vehicle routing with simultaneous pickup and delivery. Comput. Oper. Res. 2020, 122, 104987. [Google Scholar] [CrossRef]
- Wang, J.; Sun, Y.; Zhang, Z.; Gao, S. Solving multitrip pickup and delivery problem with time windows and manpower planning using multiobjective algorithms. IEEE/CAA J. Autom. Sin. 2020, 7, 1134–1153. [Google Scholar] [CrossRef]
- Jun, S.; Lee, S.; Yih, Y. Pickup and delivery problem with recharging for material handling systems utilising autonomous mobile robots. Eur. J. Oper. Res. 2021, 289, 1153–1168. [Google Scholar] [CrossRef]
- Ma, Y.; Hao, X.; Hao, J.; Lu, J.; Liu, X.; Xialiang, T.; Yuan, M.; Li, Z.; Tang, J.; Meng, Z. A hierarchical reinforcement learning based optimization framework for large-scale dynamic pickup and delivery problems. Adv. Neural Inf. Process. Syst. 2021, 34, 23609–23620. [Google Scholar]
- Berbeglia, G.; Cordeau, J.F.; Laporte, G. Dynamic pickup and delivery problems. Eur. J. Oper. Res. 2010, 202, 8–15. [Google Scholar] [CrossRef]
- Bartlett, K.; Lee, J.; Ahmed, S.; Nemhauser, G.; Sokol, J.; Na, B. Congestion-aware dynamic routing in automated material handling systems. Comput. Ind. Eng. 2014, 70, 176–182. [Google Scholar] [CrossRef]
- Fransen, K.; Van Eekelen, J.; Pogromsky, A.; Boon, M.A.; Adan, I.J. A dynamic path planning approach for dense, large, grid-based automated guided vehicle systems. Comput. Oper. Res. 2020, 123, 105046. [Google Scholar] [CrossRef]
- Purba, D.S.D.; Kontou, E.; Vogiatzis, C. Evacuation route planning for alternative fuel vehicles. Transp. Res. Part Emerg. Technol. 2022, 143, 103837. [Google Scholar] [CrossRef]
- Purba, D.S.D.; Balisi, S.; Kontou, E. Refueling Station Location Model to Support Evacuation of Alternative Fuel Vehicles. Transp. Res. Rec. 2024, 2678, 521–538. [Google Scholar] [CrossRef]
- Regue, R.; Recker, W. Proactive vehicle routing with inferred demand to solve the bikesharing rebalancing problem. Transp. Res. Part E Logist. Transp. Rev. 2014, 72, 192–209. [Google Scholar] [CrossRef]
- Hess, A.; Spinler, S.; Winkenbach, M. Real-time demand forecasting for an urban delivery platform. Transp. Res. Part Logist. Transp. Rev. 2021, 145, 102147. [Google Scholar] [CrossRef]
- Matsuoka, R.; Kobayashi, K.; Yamashita, Y. Online Optimization of Pickup and Delivery Problem Considering Demand Forecasting. In Proceedings of the 2023 IEEE 12th Global Conference on Consumer Electronics, Nara, Japan, 10–13 October 2023; pp. 879–880. [Google Scholar]
- Bemporad, A.; Morari, M. Control of systems integrating logic, dynamics, and constraints. Automatica 1999, 35, 407–427. [Google Scholar] [CrossRef]
- Kobayashi, K.; Imura, J.i. Deterministic finite automata representation for model predictive control of hybrid systems. J. Process Control 2012, 22, 1670–1680. [Google Scholar] [CrossRef]
- Williams, H.P. Model Building in Mathematical Programming; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Order | ||||
|---|---|---|---|---|
| 0 | 7 | |||
| 5 | 12 | |||
| 5 | 12 | |||
| 8 | 13 | |||
| 8 | 13 | |||
| 8 | 13 | |||
| 8 | 13 |
| Results at Time 0 | Results at Time 5 | Results at Time 8 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Order | Agent | Pickup Time | Delivery Time | Agent | Pickup Time | Delivery Time | Agent | Pickup Time | Delivery Time |
| 3 | 0 | 5 | 3 | 0 | 5 | – | – | – | |
| – | – | – | 2 | 5 | 9 | – | – | – | |
| – | – | – | 1 | 5 | 10 | – | – | – | |
| – | – | – | – | – | – | – | – | – | |
| – | – | – | – | – | – | – | – | – | |
| – | – | – | – | – | – | – | – | – | |
| – | – | – | – | – | – | – | – | – | |
| Time | Cost Function |
|---|---|
| 0 | 5 |
| 5 | 12 |
| 8 | Infeasible |
| Results at Time 0 | Results at Time 5 | Results at Time 8 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Order | Agent | Pickup Time | Delivery Time | Agent | Pickup Time | Delivery Time | Agent | Pickup Time | Delivery Time |
| 3 | 0 | 3 | 3 | 0 | 3 | 3 | 0 | 3 | |
| – | – | – | 2 | 5 | 12 | 2 | 5 | 14 | |
| – | – | – | 1 | 5 | 9 | 1 | 5 | 9 | |
| – | – | – | – | – | – | 3 | 10 | 13 | |
| – | – | – | – | – | – | 8 | 9 | 13 | |
| – | – | – | – | – | – | 2 | 10 | 13 | |
| – | – | – | – | – | – | 6 | 9 | 14 | |
| Time | Cost Function | |||
|---|---|---|---|---|
| 0 | 5 | 0 | 0 | 5 |
| 5 | 10 | 0 | 0 | 10 |
| 8 | 17 | 3 | 0 | 20 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Matsuoka, R.; Kobayashi, K.; Yamashita, Y. Online Optimization of Pickup and Delivery Problem Considering Feasibility. Future Internet 2024, 16, 64. https://doi.org/10.3390/fi16020064
Matsuoka R, Kobayashi K, Yamashita Y. Online Optimization of Pickup and Delivery Problem Considering Feasibility. Future Internet. 2024; 16(2):64. https://doi.org/10.3390/fi16020064
Chicago/Turabian StyleMatsuoka, Ryo, Koichi Kobayashi, and Yuh Yamashita. 2024. "Online Optimization of Pickup and Delivery Problem Considering Feasibility" Future Internet 16, no. 2: 64. https://doi.org/10.3390/fi16020064
APA StyleMatsuoka, R., Kobayashi, K., & Yamashita, Y. (2024). Online Optimization of Pickup and Delivery Problem Considering Feasibility. Future Internet, 16(2), 64. https://doi.org/10.3390/fi16020064