1. Introduction
In recent years, the explosive growth of various applications, such as video streaming services, has caused total mobile network traffic to increase at an average annual rate of 46% [
1]. Even in Japan, in June 2023, the average traffic per contract increased approximately 1.6 times in three years and 1.2 times in one year [
2]. Fifth generation mobile communication system (5G) services were launched worldwide in 2019 to address this issue [
3]. In the 5G era, people and objects are connected to the Internet as social infrastructure. This trend is expected to continue in the future, and in the Beyond 5G/6G era, mobile communication systems are expected to function as the basic infrastructure of society [
4,
5,
6,
7]. In today’s society, it is clear that telecommunications are an indispensable technology for daily life. The number of subscriptions to mobile communications in Japan, including cell phones that we carry with us and use all the time, was approximately 205.48 million at the end of September 2022, an increase of 3.5% from the previous year [
8]. In addition, the number of mobile applications is expected to increase, as mobile telecommunications are essential in increasingly active fields such as the Internet of Things (IoT) for home appliances and self-driving cars [
9,
10,
11]. Since 2019, 5G, which was anticipated as a foundational framework for connecting the IoT, has been launched globally [
12]. Notably, the adoption of millimeter waves (mmWaves), which offer a broader bandwidth for enhanced throughput, marked the first in mobile communications to address the swiftly rising user traffic [
13]. It is clear from this that, increasingly, the amount of data generated by mobile communications will further increase. In addition, Industry 5.0 has recently been envisioned by the European Commission as a roadmap for the future, aiming to foster a prosperous society through the strategic use of advanced technologies such as artificial intelligence, robotics, big data, and the IoT [
14]. These technologies are being put to practical use in digital twins that connect the real and virtual worlds [
15]. Unmanned Aerial Vehicles (UAVs), which can move freely in three dimensions, are essential to realizing Industry 5.0 [
16,
17]. UAVs have recently been widely used in military and civilian applications, characterized by their high mobility, rapid deployment, and low cost. Examples of use include reconnaissance, transportation, inspection, agricultural irrigation, disaster relief, and many other fields [
18,
19,
20,
21,
22].
While high-quality communications are available to everyone, there are situations in which communications become unavailable. This is the case during major disasters and large-scale events: the magnitude 6.5 Kumamoto earthquake in April 2016 caused landslides and commercial power outages that knocked out as many as 400 cell phone base stations (BSs), rendering cell phones temporarily unusable [
23]. In addition to earthquakes, there have been many cases overseas where communications have been disrupted due to hardware damage caused by hurricanes [
24,
25]. Since communication is necessary for rescue operations during a disaster, restoring the communication environment quickly is essential [
26,
27,
28]. During large-scale events, the number of accesses and the amount of traffic in a local area will increase due to the active posting of videos and photos due to the spread of social networking services (SNSs), creating a situation where sufficient communication is impossible [
29]. Adding more BSs to cope with these temporary situations is costly for installation and maintenance. In addition, since mobile base station vehicles are affected by the ground environment, such as going to the site to install them for communication area restoration, it is difficult to respond quickly in the event of road damage [
30]. Therefore, a temporary network is needed that can provide high-capacity communications and flexibly change the location of its provision. Therefore, network construction using mmWave frequency band radio waves and UAV base stations is expected.
We will use UAV BSs that utilize mmWave band radio waves to address these issues. mmWave radio waves are in the 30–300 GHz band, a high-frequency band characterized by high-capacity, low-latency communications [
31]. In addition, drones are not dependent on the ground environment, such as traffic conditions, and can be deployed remotely and unmanned. The mmWave bandwidth has the disadvantages of being vulnerable to obstacles and being affected by distance attenuation [
32]. UAV technology enables communications from the sky, which provides a clear line of sight, and beamforming technology enables high-quality communications.
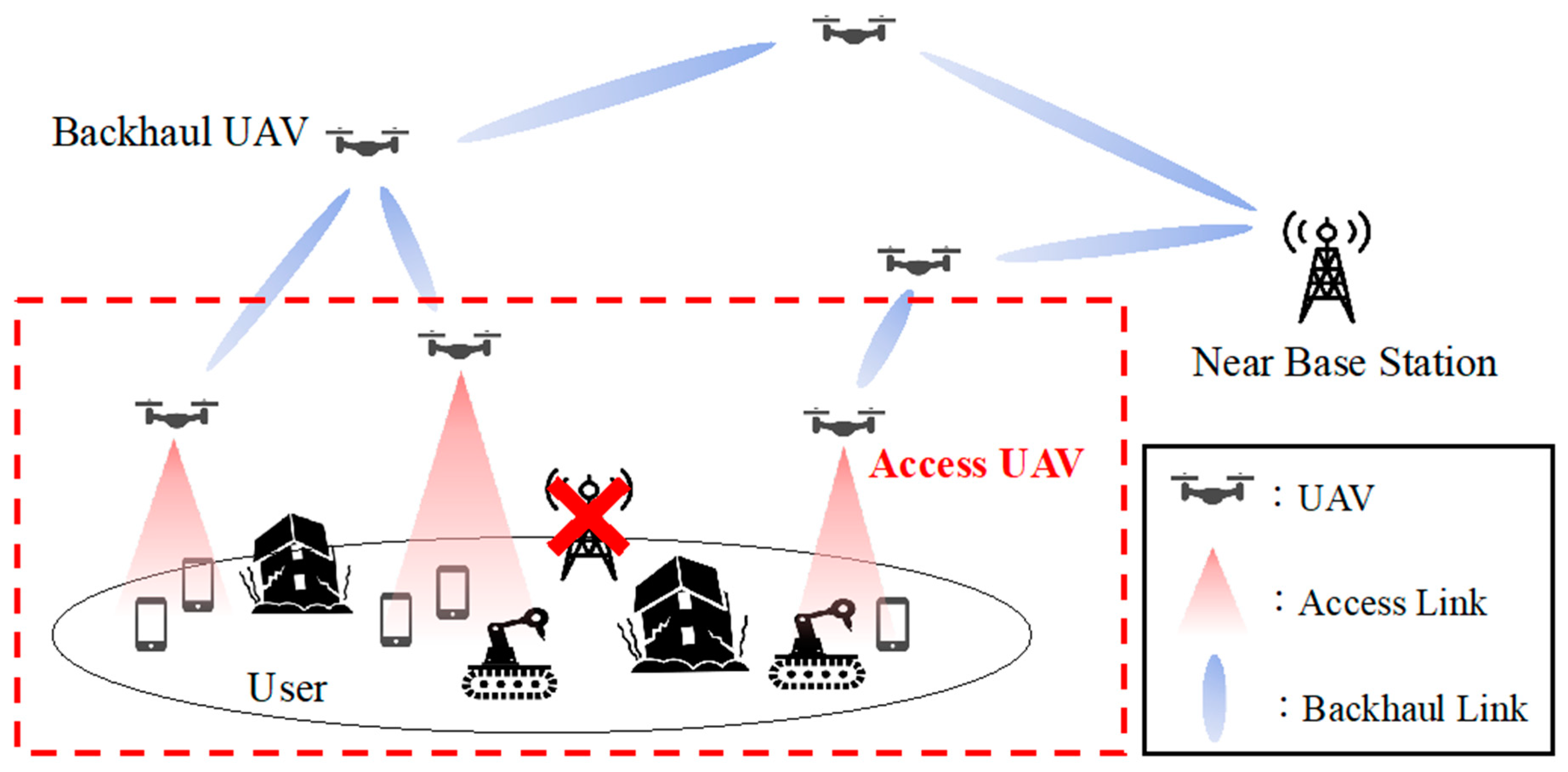
The system architecture of a mmWave UAV BS is shown in
Figure 1 [
33]. Here, we consider a situation where the existing cellular communication network is no longer available. The entire system is divided into two parts: backhaul UAVs and access link UAVs. The backhaul UAVs connect the access link UAVs with available ground BSs far from the user. By deploying an appropriate location and number of backhaul UAVs, multi-hop communication is possible even when the distance between the user and the ground BS is large. Access link UAVs communicate directly with users instead of BSs. mmWave bands are used for all radio communications between these backhaul UAVs and the access link UAVs. mmWave bands are highly linear and are significantly attenuated by obstacles. Since this architecture utilizes drones, it is possible to communicate in the upper airspace area with good communication visibility without being affected by obstructions. In addition, since there has been little use of communications in the sky area and mmWave band radio waves have not been used much, it is possible to communicate with little radio interference.
Currently, mobile BS vehicles are used for temporary network construction during emergencies, but drones can cover a wider area because they communicate from a higher altitude [
34]. In the future, satellite communications such as “Starlink” and UAV-based communication technologies such as HAPS (High Altitude Platform Systems) are expected to be used for communications from the sky [
33,
35] at the altitude of about 20 km. On the other hand, the drones in this paper will be used at altitudes of tens to hundreds of meters so that the communication distance will be relatively short, the atmospheric loss will be smaller than others, and communication will be possible with low latency. In the past, network construction utilizing UAV BSs had been considered by other researchers, but only microwaves had been used to guarantee connectivity [
36]. Microwaves have limited applicability due to bandwidth limitations. There is also concern about the depletion of frequency resources, necessitating new research on frequency sharing and the development of higher frequency bands. Although there have been studies on building UAV-based networks using mmWave technology, these have been limited to theoretical studies based on simulations [
37,
38].
The main features of 5G communication services include high-capacity communications, large numbers of simultaneous connections, low latency, and high reliability [
39]. In [
40], latency in mmWave networks was studied. The goal there was to construct an edge content delivery system that adapts to user information and relocate content servers through dynamic routing on a mmWave mesh backhaul network, and experiments were conducted to study its effectiveness. The latency in the paper was measured through ping tests.
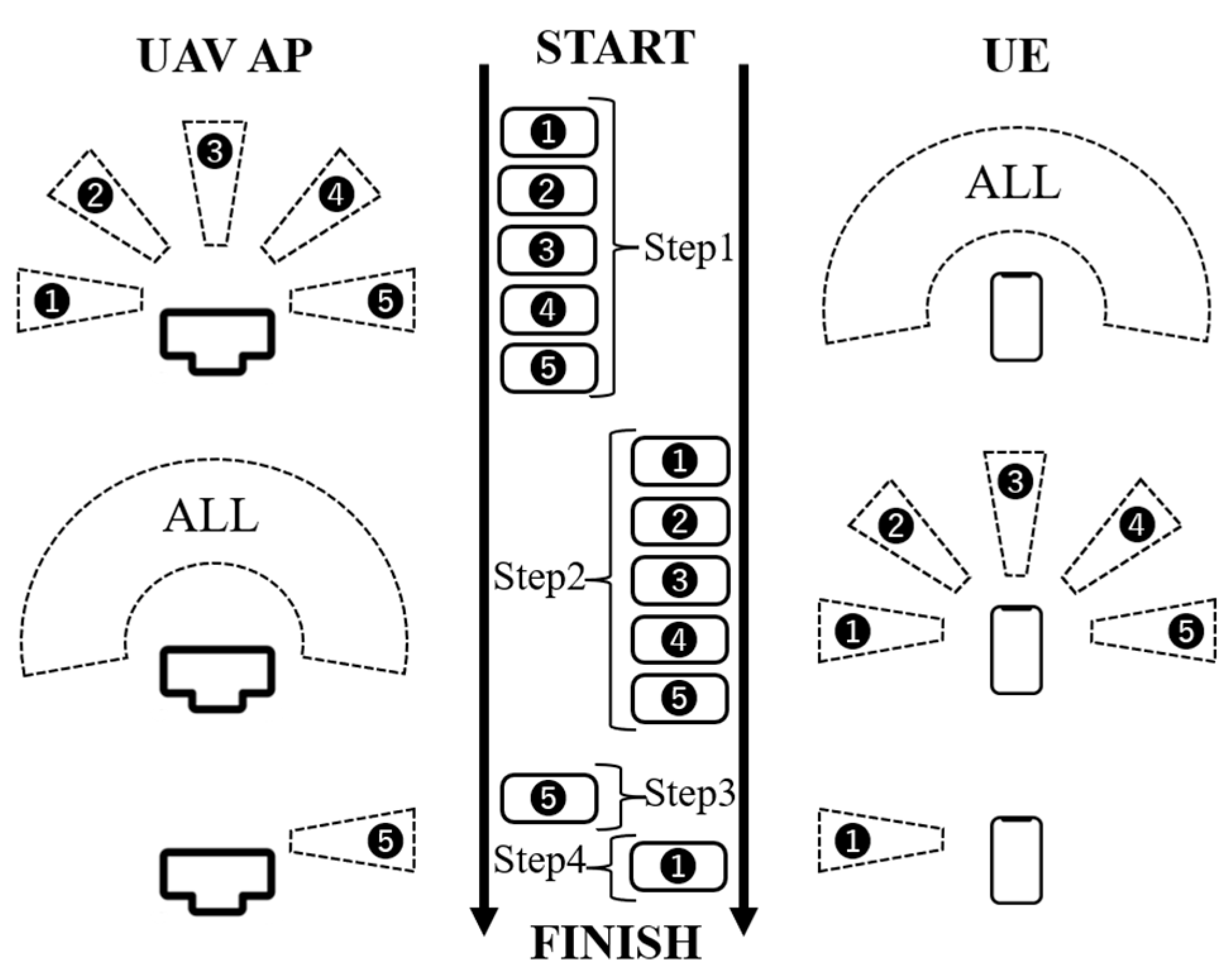
Since mmWave communications are significantly affected by distance attenuation and shielding, the placement of UAVs concerning user distribution is an important issue [
33]. In [
33], dynamic placement of access UAVs for mmWave UAV BSs for user distribution was considered. Here, assuming that the user distribution is known in advance, the authors proposed a method of UAV placement by frequency division to maximize the system rate. Here, the method in [
41] was used to determine the optimal altitude of the UAVs, while the K-means method and the minimum circle problem were employed to determine the UAVs’ optimal interference-reduced placement. The paper also showed that frequency division efficiently distributes the available bandwidth to each UAV, which helps to avoid interference and improves the overall system rate.
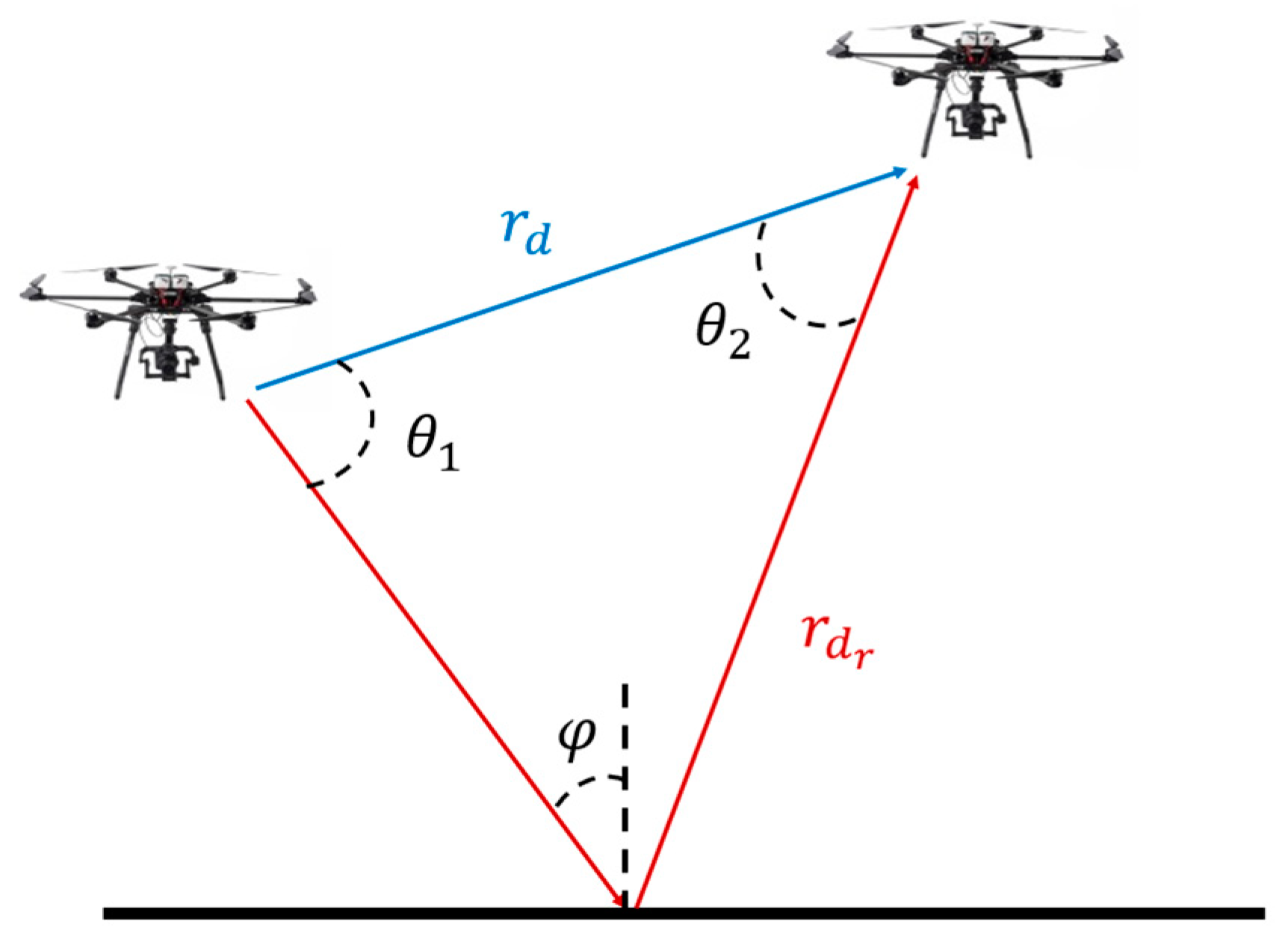
In mmWave UAV BSs, many UAVs communicate with each other, but the communication from the UAVs to the user is directed toward the ground, which causes ground reflection. Therefore, to realize a simultaneous uplink/downlink UAV network, it is necessary to consider ground-reflected wave interference between adjacent UAVs. For this purpose [
42], employed SIR (Signal Interference Power Ration) as a metric to show that an architecture with circularly polarized antennas can significantly reduce interference compared to the conventional architecture with linearly polarized antennas. Furthermore, it was found that interference can be significantly reduced when both backhaul UAVs and access UAVs use identical circularly polarized antennas.
In addition to the above, power consumption is also an issue in mmWave UAV BS networks. Although specifications for wired drones have been considered, the operating range of UAVs is limited by the power cable length [
43,
44]. To take full advantage of the freedom of movement that is also an advantage of UAVs, this study focuses on UAVs that can operate wirelessly without earth connection cables. Therefore, each UAV must be equipped with a battery. This battery must power not only the UAV’s flight but also the communications of various wireless interfaces. There is a tradeoff: increasing battery capacity increases the relative weight of the UAV while also increases the power supplied to the UAV. However, the issue of UAVs’ power consumption is beyond the scope of this paper, knowing that there is research and development of lightweight, low-power wireless components and lightweight, high-capacity batteries, or even wireless power transmission for UAVs.
Wireless communications at the mmWave frequency band are critical for 5G wireless networks [
45]. In addition, understanding radio propagation characteristics in the airspace domain is essential for the efficient use and development of air-to-ground mobile communication systems in the future. However, to the authors’ best knowledge, there are only a few studies focusing on the use of the mmWave frequency band for low-altitude platforms such as UAVs [
37].
Therefore, this paper examines the construction of a UAV BS network using mmWave frequencies and demonstrates its effectiveness via both empirical experiments and validating theoretical studies. The major contributions are briefly outlined below.
We are the first to propose, design, and implement a UAV system equipped with a mmWave device.
We conducted an outdoor proof-of-concept (PoC) experiment with multiple drones equipped with mmWave communication devices, evaluating the proposed system over various scenarios.
We discussed the radio propagation model for mmWave communications between UAVs, based on the data collected. The validity of the proposed model is demonstrated by comparing the outdoor experimental results with those from theoretical studies.
The structure of this paper is presented as follows.
Section 2 provides detailed technical descriptions and relevant prior studies. This section begins by examining mmWave wireless communication, followed by a discussion on the dynamic deployment approach for mmWave UAV access, and concludes with an exposition on mmWave antenna polarization.
Section 3 presents an in-depth look at our proposed mmWave-powered UAV system, describing the experimental methods and presenting the results.
Section 4 describes the numerical evaluation model, including the setup and the resulting numerical data.
Section 5 compares the experiment and numerical results. Finally,
Section 6 concludes the paper with a summary and discussion of future work.
This paper is an extended version of a conference paper presented at The 14th International Conference on Ubiquitous and Future Networks (ICUFN 2024) held in Paris, France in July 2023 [
46].
6. Findings and Future Work
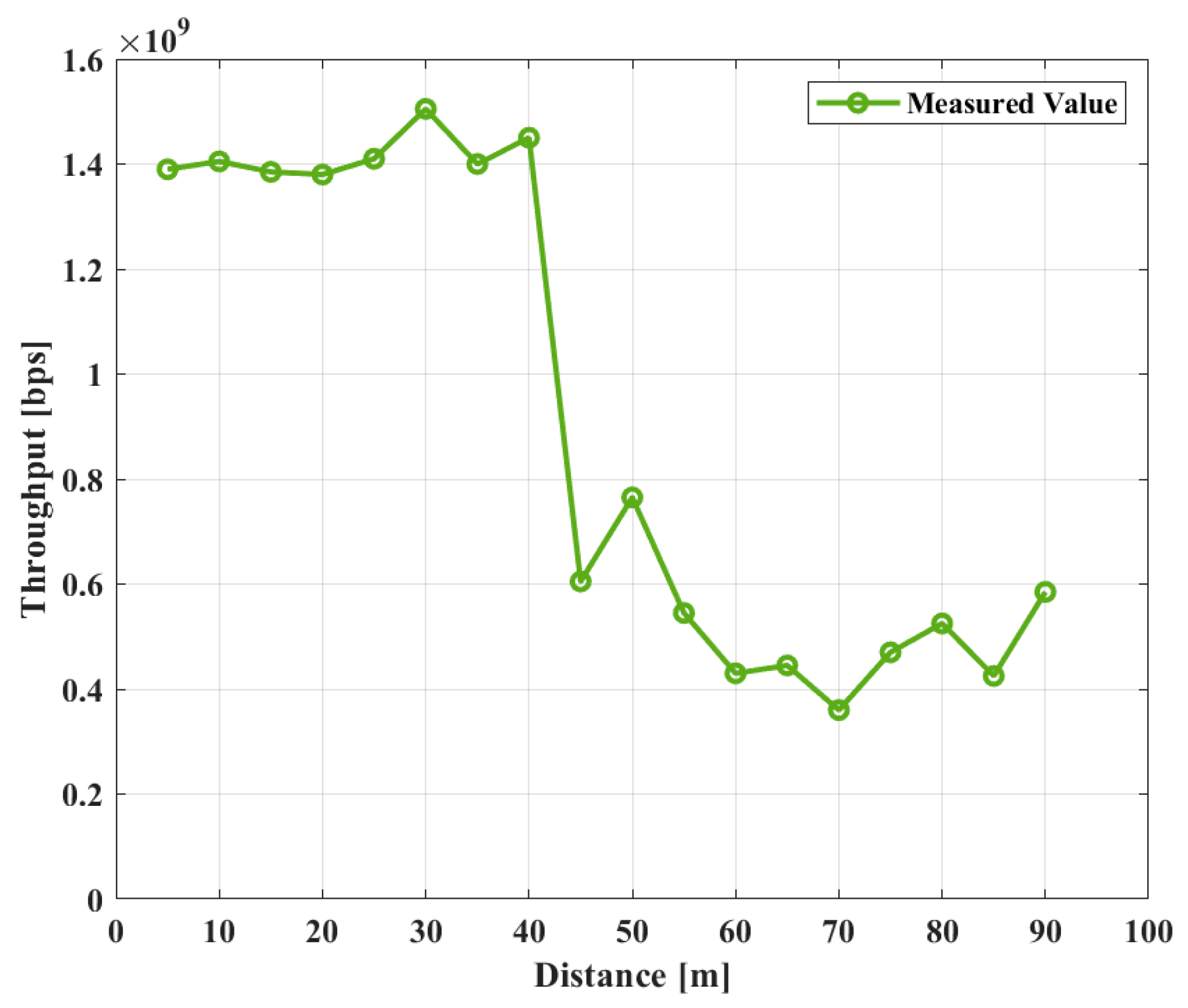
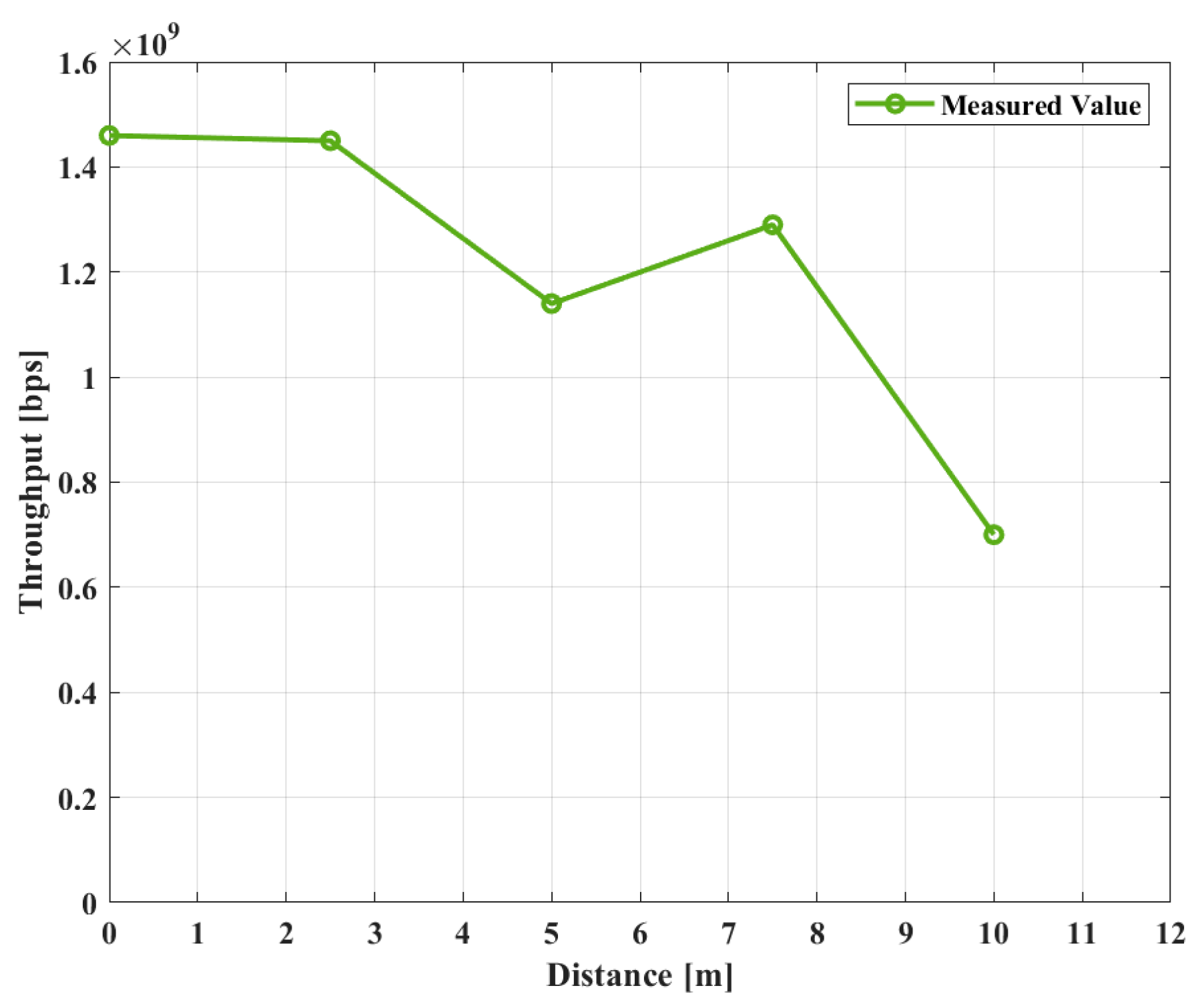
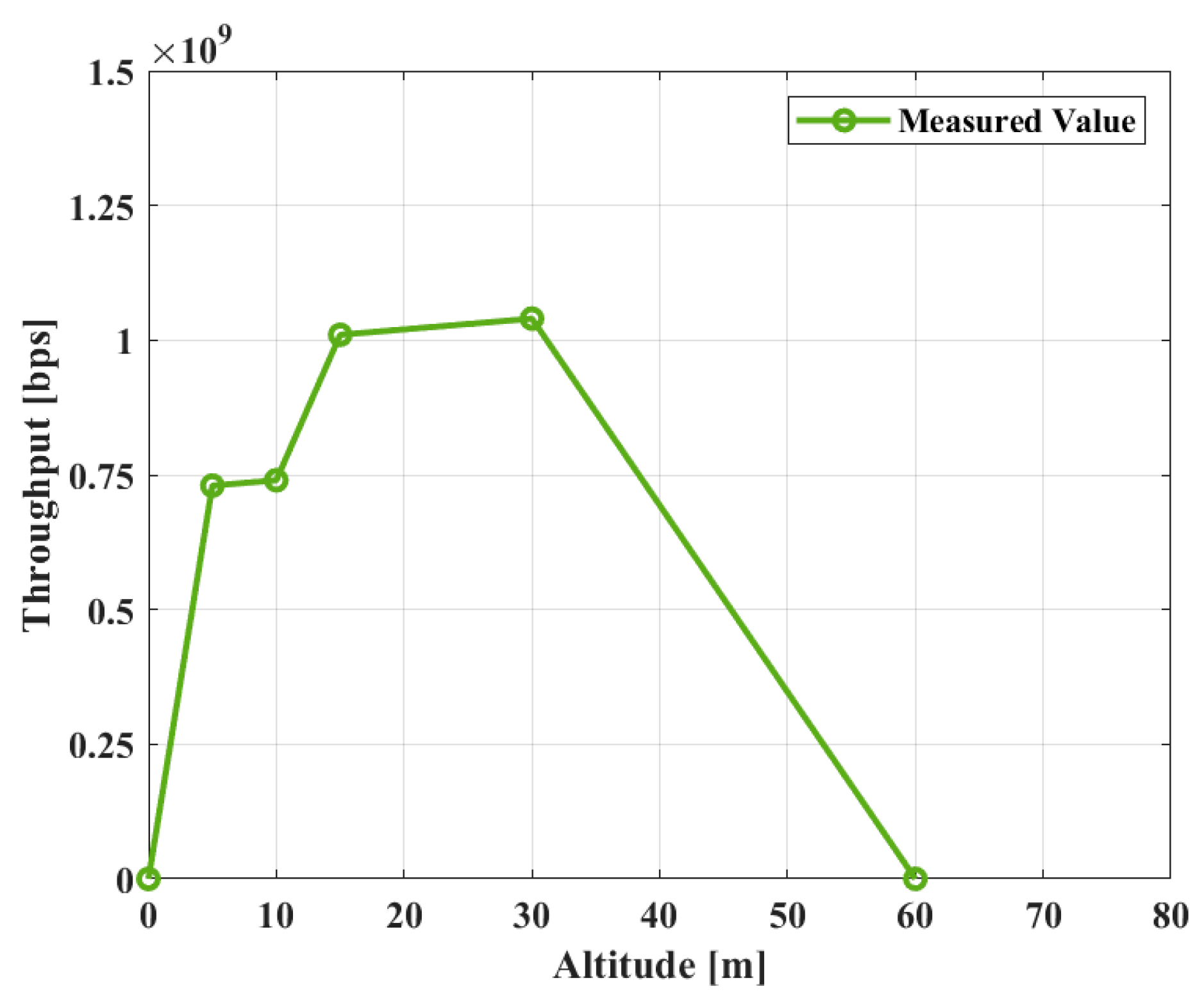
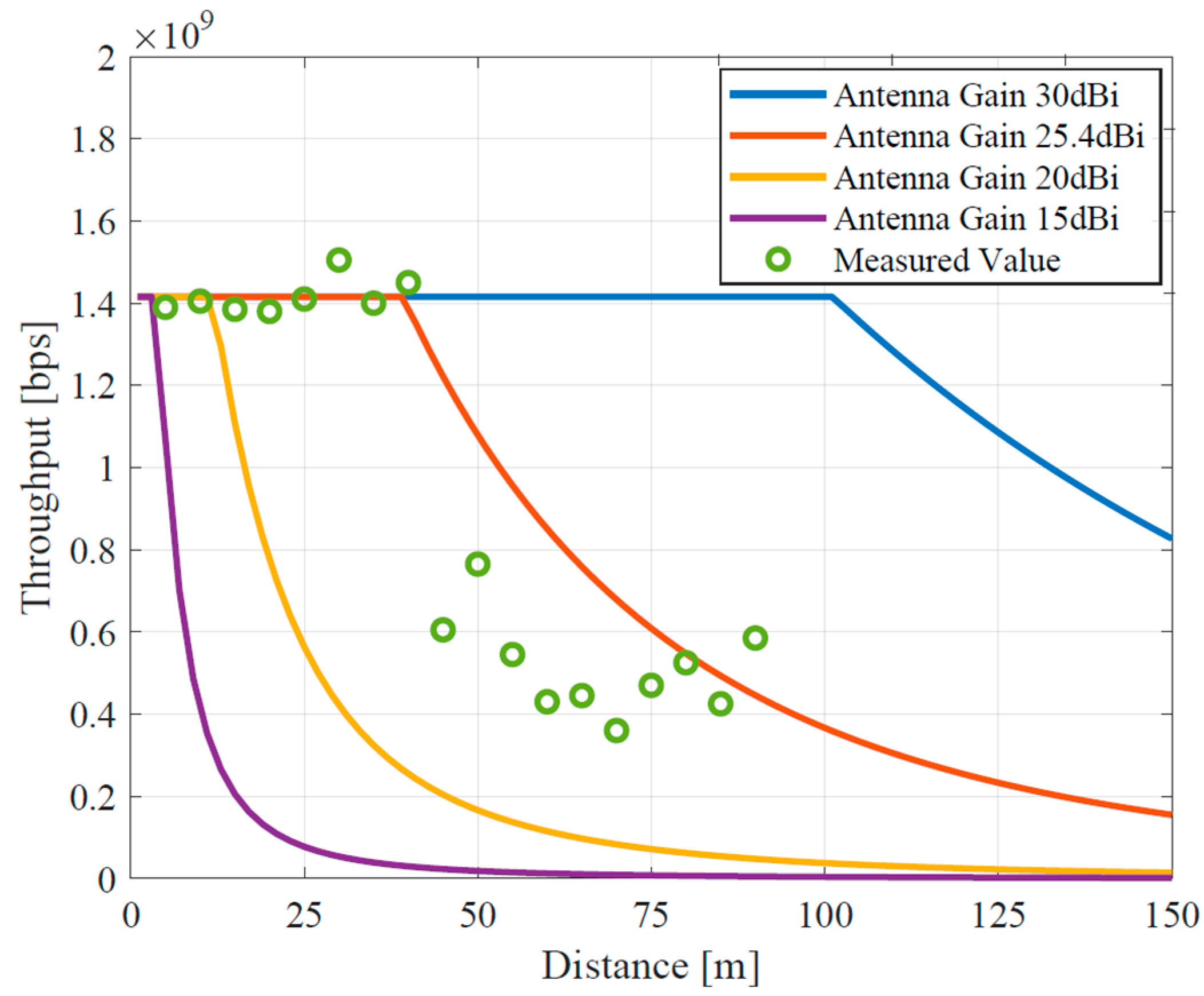
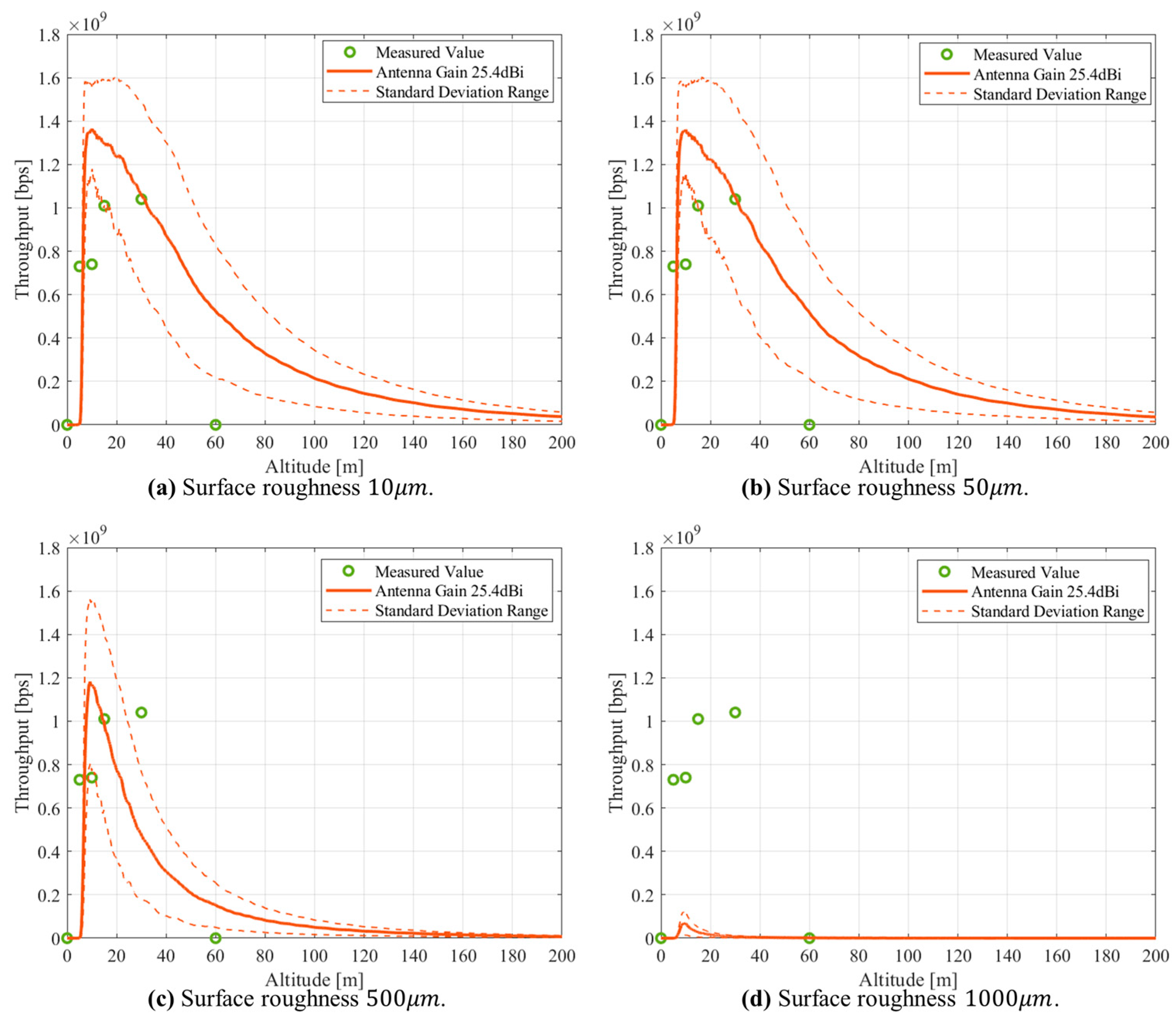
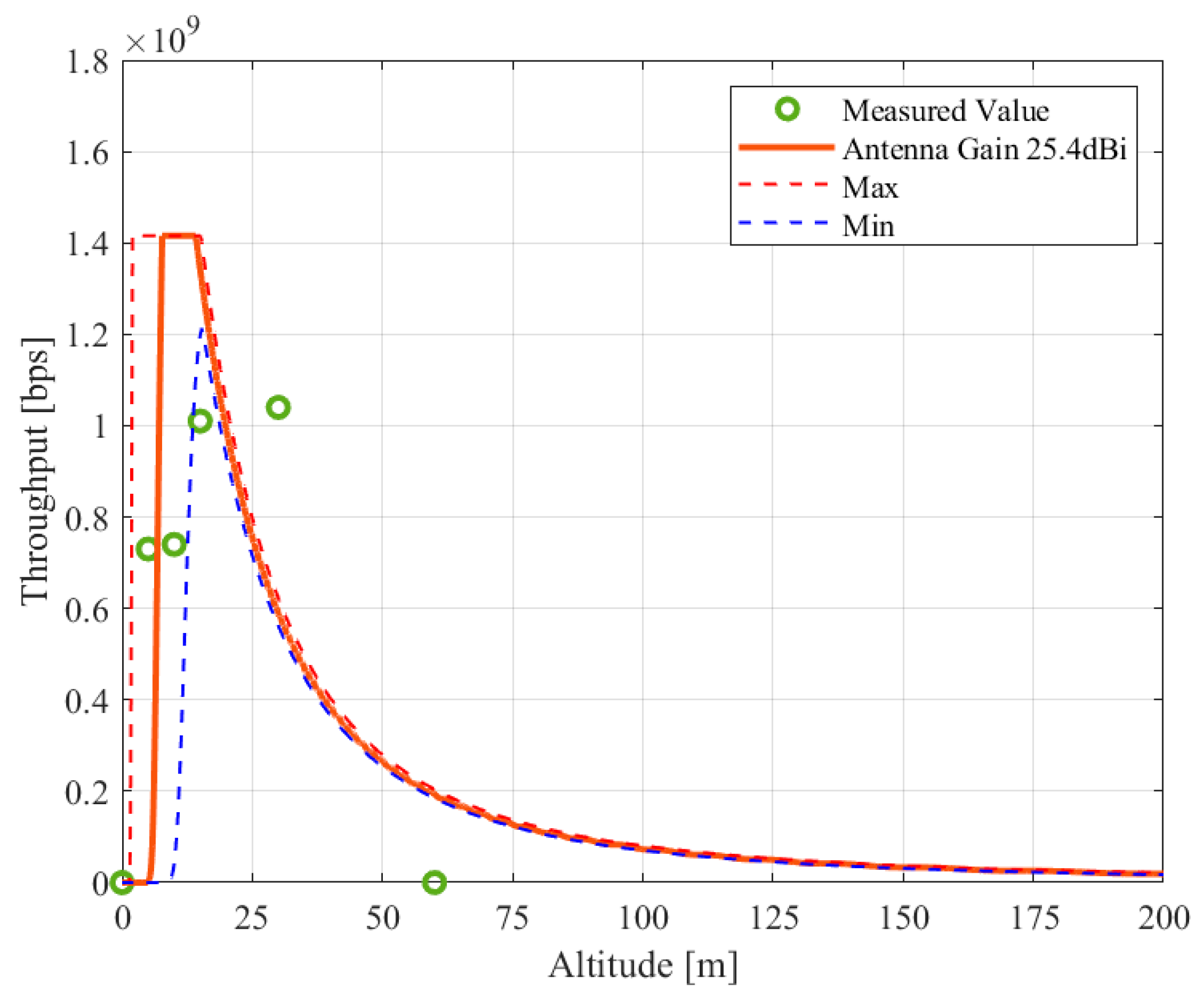
In this paper, we investigated the radio propagation characteristics of mmWave UAV BSs for the construction of temporary network areas during contingencies such as large-scale events and disasters, based on both numerical evaluations and demonstrative experiments. We evaluated the distance and coverage characteristics between access UAVs and terminals and analyzed the effect of radio interference due to earth reflection. Our findings revealed that our experimental devices, utilizing the IEEE802.11ad standard, could achieve high-capacity communication at a rate of nearly 1.5 Gbps. Also, ground reflections were confirmed as sources of interference. Furthermore, the consistency across the three sets of evaluation results underscores the trustworthiness of our measurements. Consequently, the theoretical model we established is a valuable reference for subsequent model-driven inquiries in system design.
However, since there is still a small gap between the measurement and theoretical results, our future endeavors will encompass more detailed investigations, e.g., to consider positional inaccuracies observed during the experiments. Given that our demonstrative experiment inherently operates in a three-dimensional (3D) space, our numerical evaluations require a more intricate 3D representation. For instance, accounting for potential shifts in the antenna’s received polarization due to possible 3D beam misalignments is essential. Also, while our current study centered on access UAVs, an expanded focus is vital—encompassing backhaul UAVs and the broader mmWave UAV BS network—to comprehensively understand the radio propagation characteristics of our proposed system. The findings presented in this paper indicated that additional errors like positioning ones are likely to occur in real UAV-based networks that might degrade or improve the system’s performance unexpectedly. It reconfirms the importance of experiment-based performance evaluation of a system like in this paper, rather than only computer-based theoretical work. Also, this paper indicates the significance of considering practical parameters in realistic environments when designing a UAV-based network that might involve many UAVs rather than only several UAVs like in this paper. One of our future works will include detailed investigation of the PHY/MAC conversion factor . In addition, this experiment was conducted with a limited amount of data due to battery issues and the need for a license to fly drones in Japan. In future verification experiments, we will devise ways to secure a larger amount of data so that not only throughput but also other KPIs, e.g., delays, can be measured.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}