
Acoustic TDOA Measurement and Accurate Indoor Positioning for Smartphone

Abstract
1. Introduction
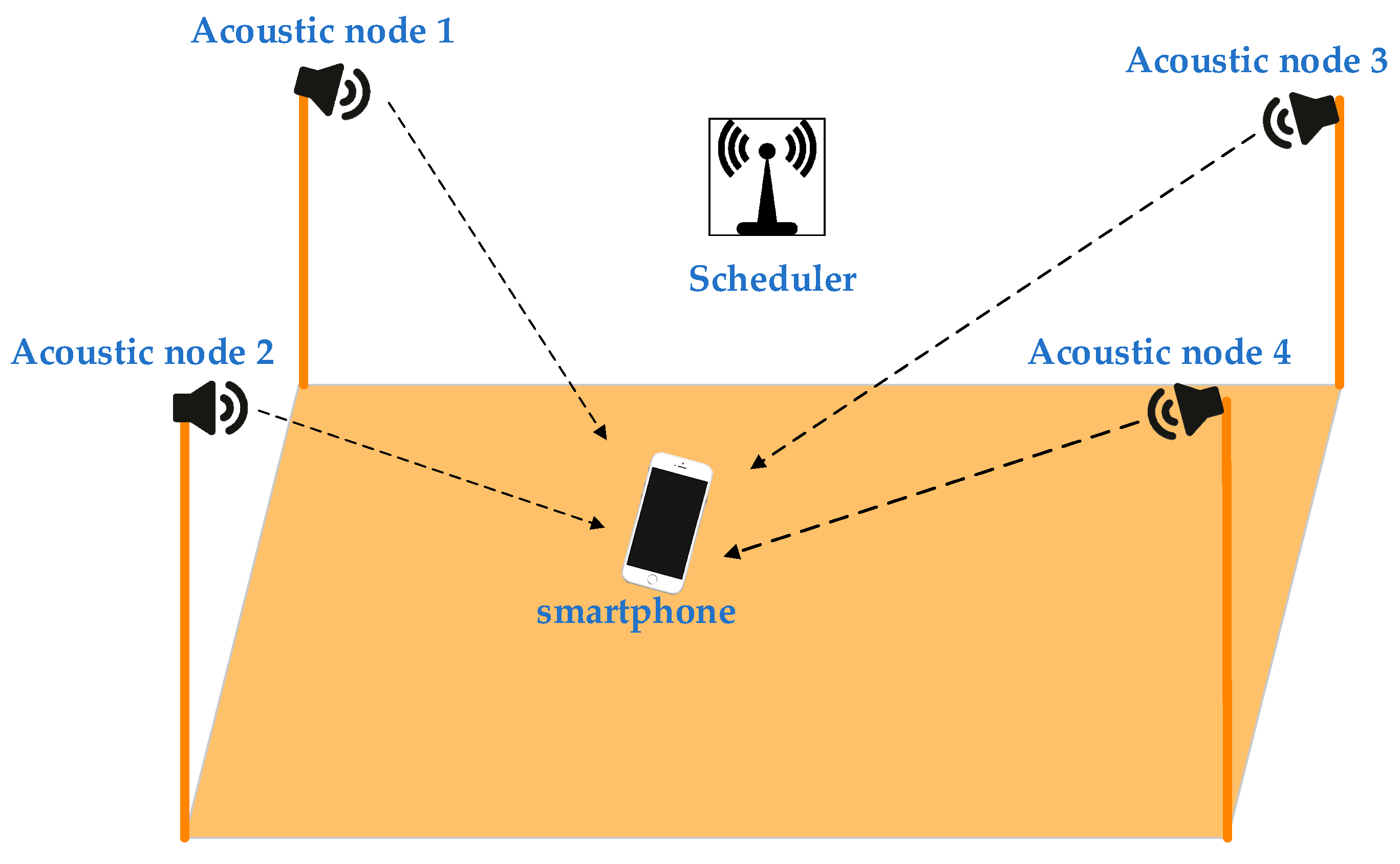
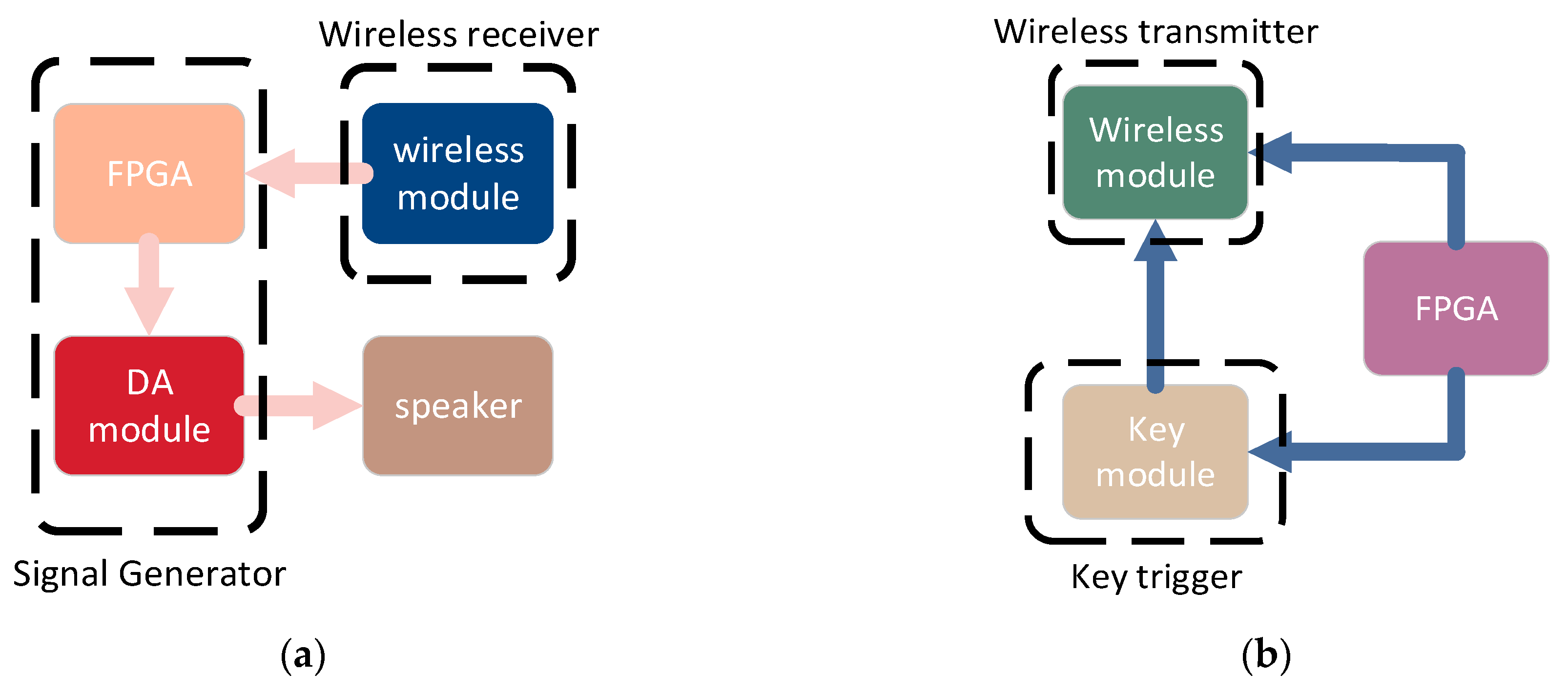
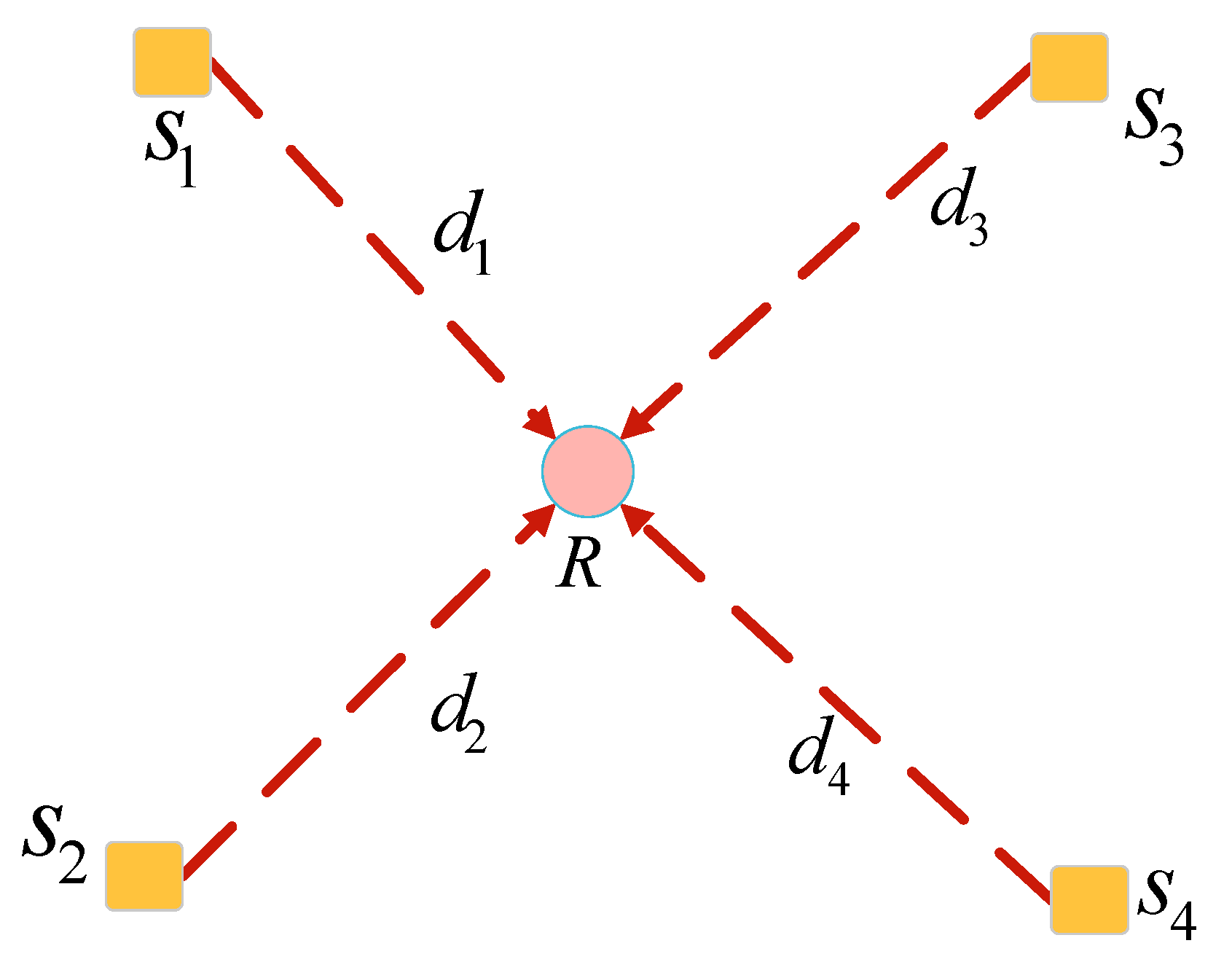
2. Basic Acoustic Positioning System
3. Robust TDOA Measurement Method
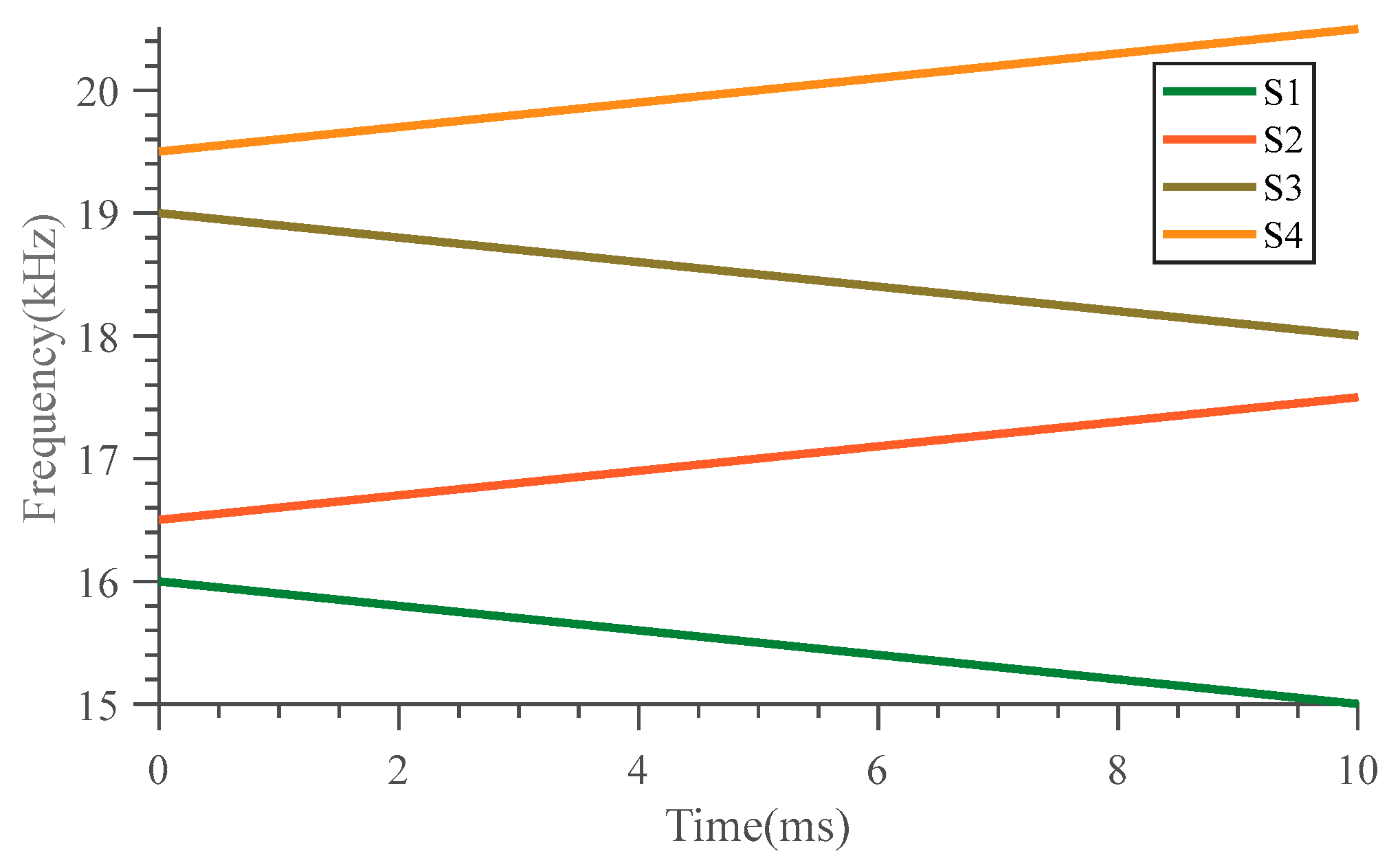
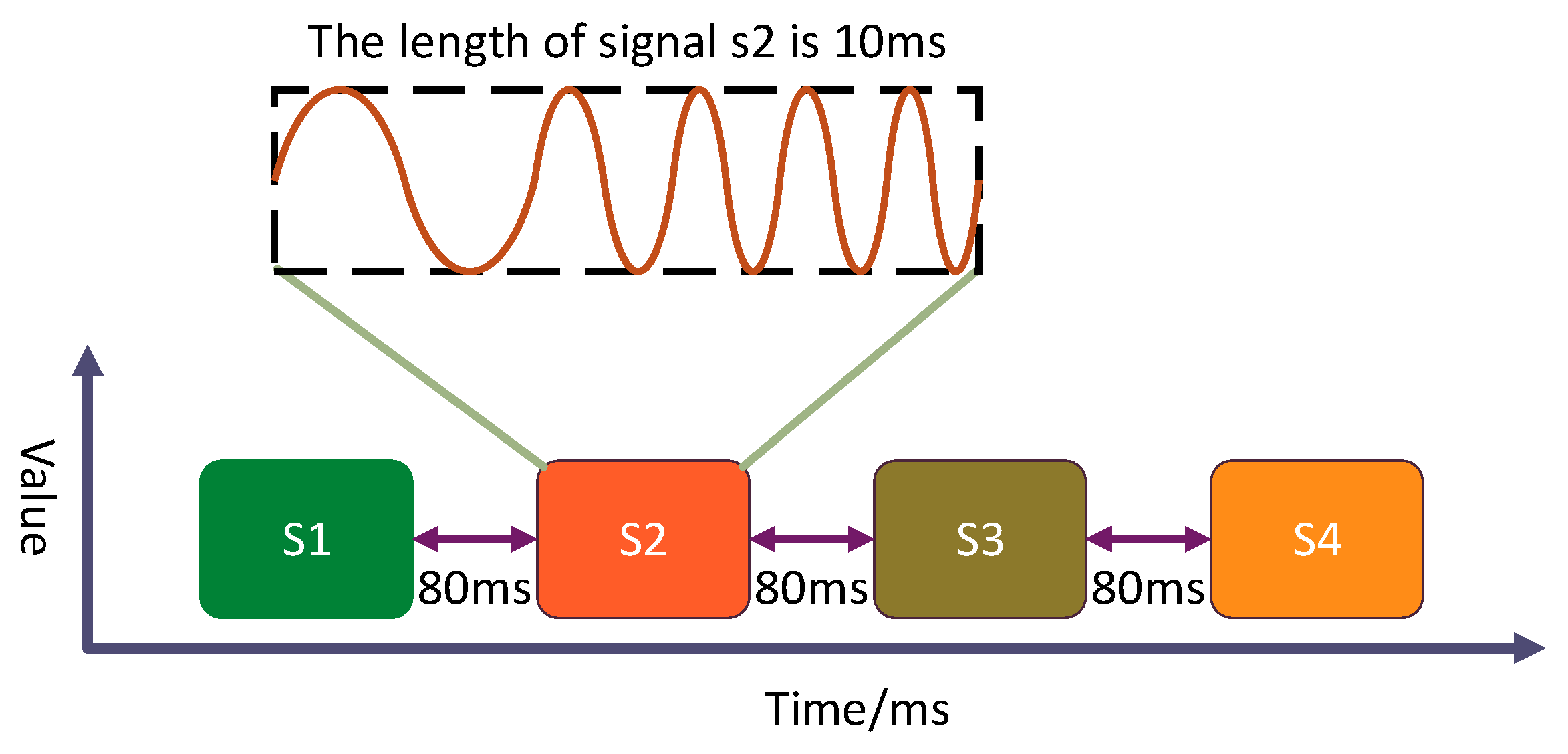
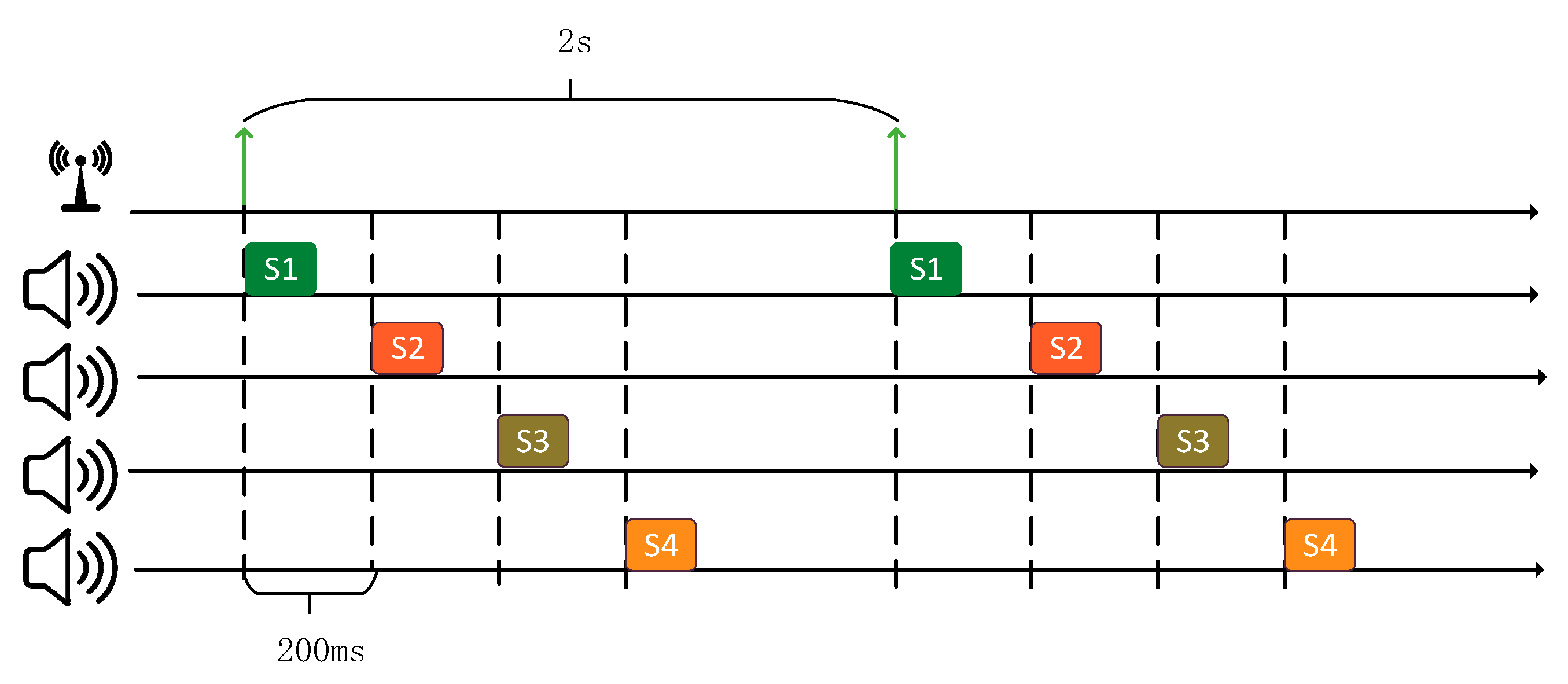
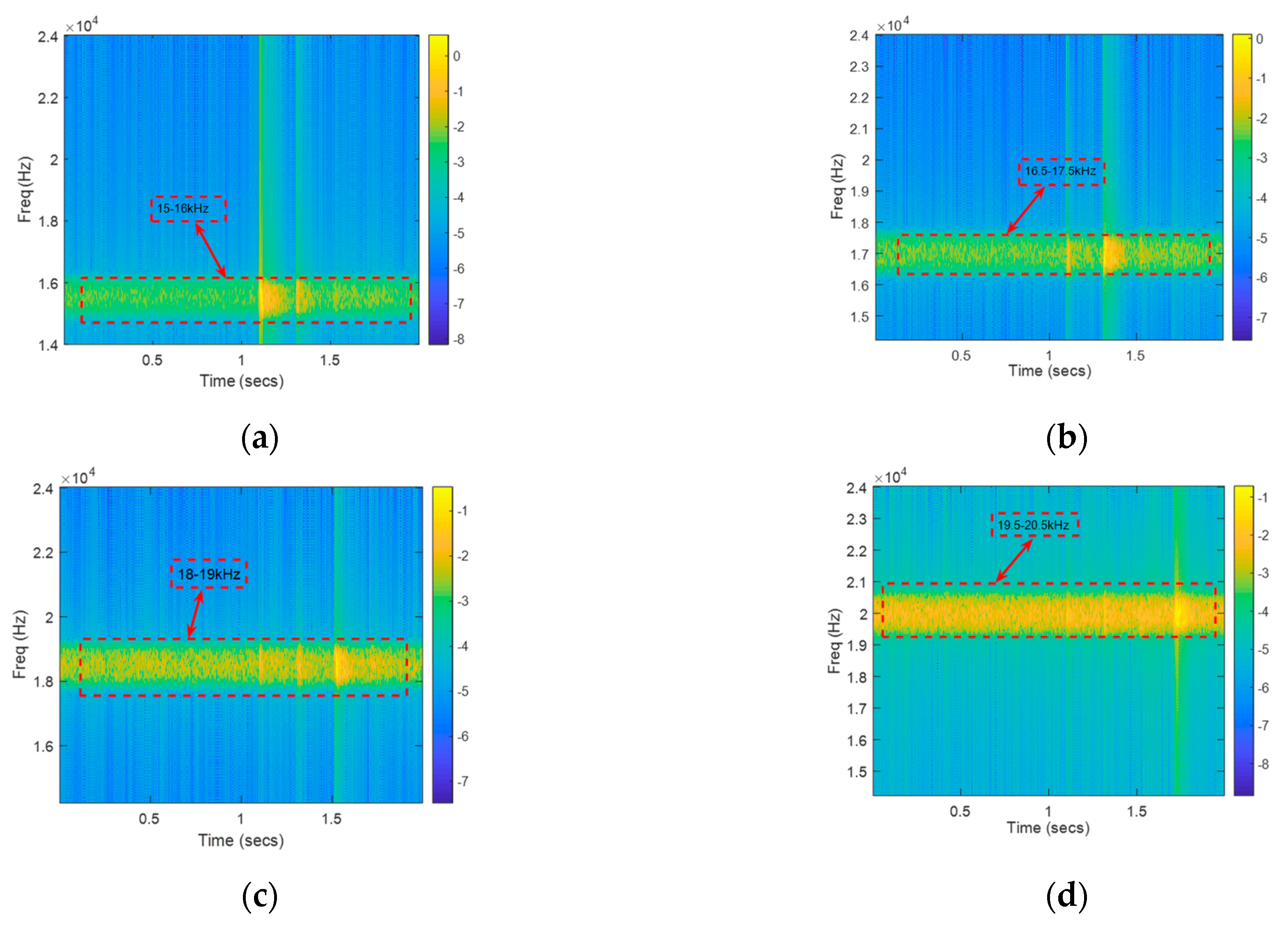
3.1. Signal Design
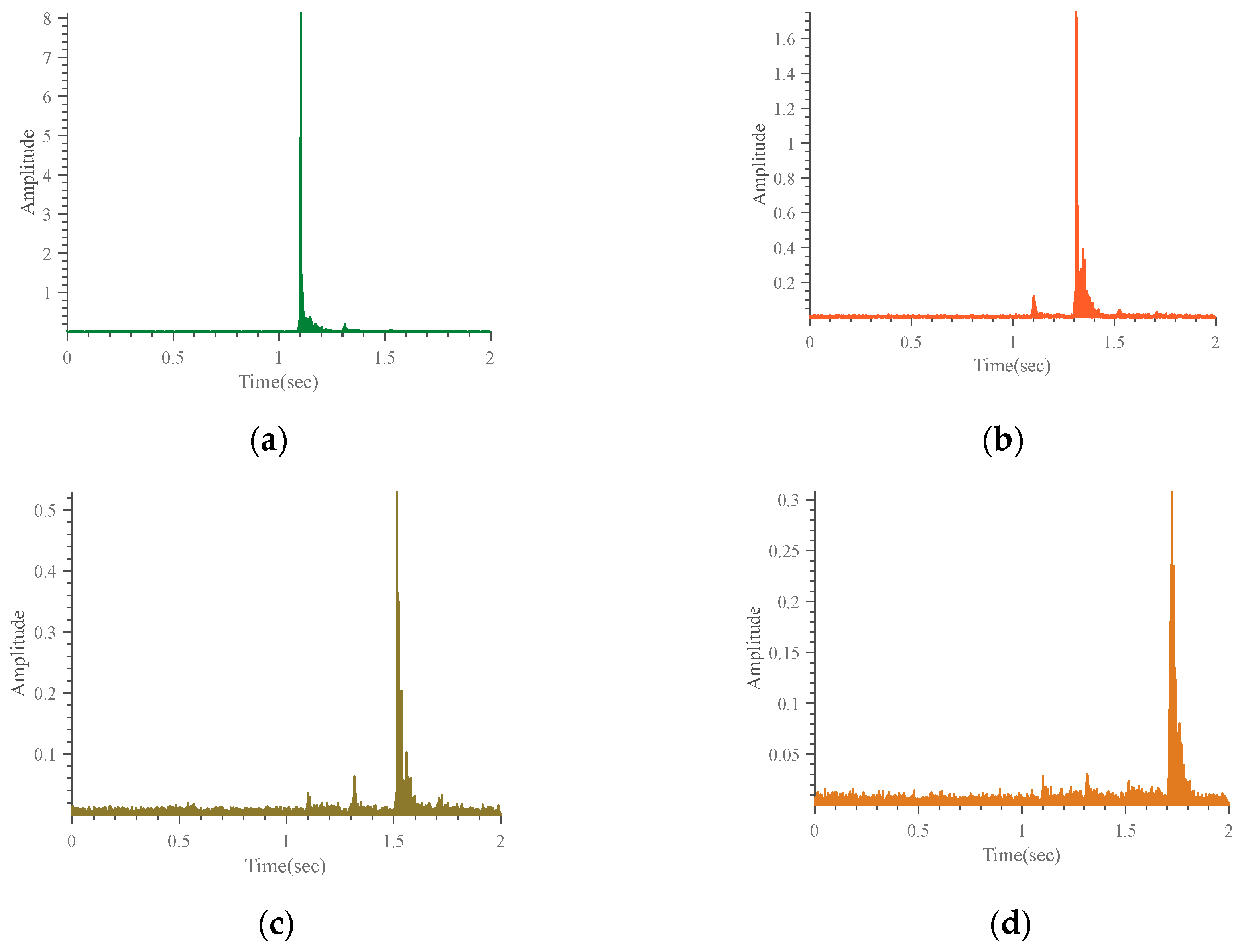
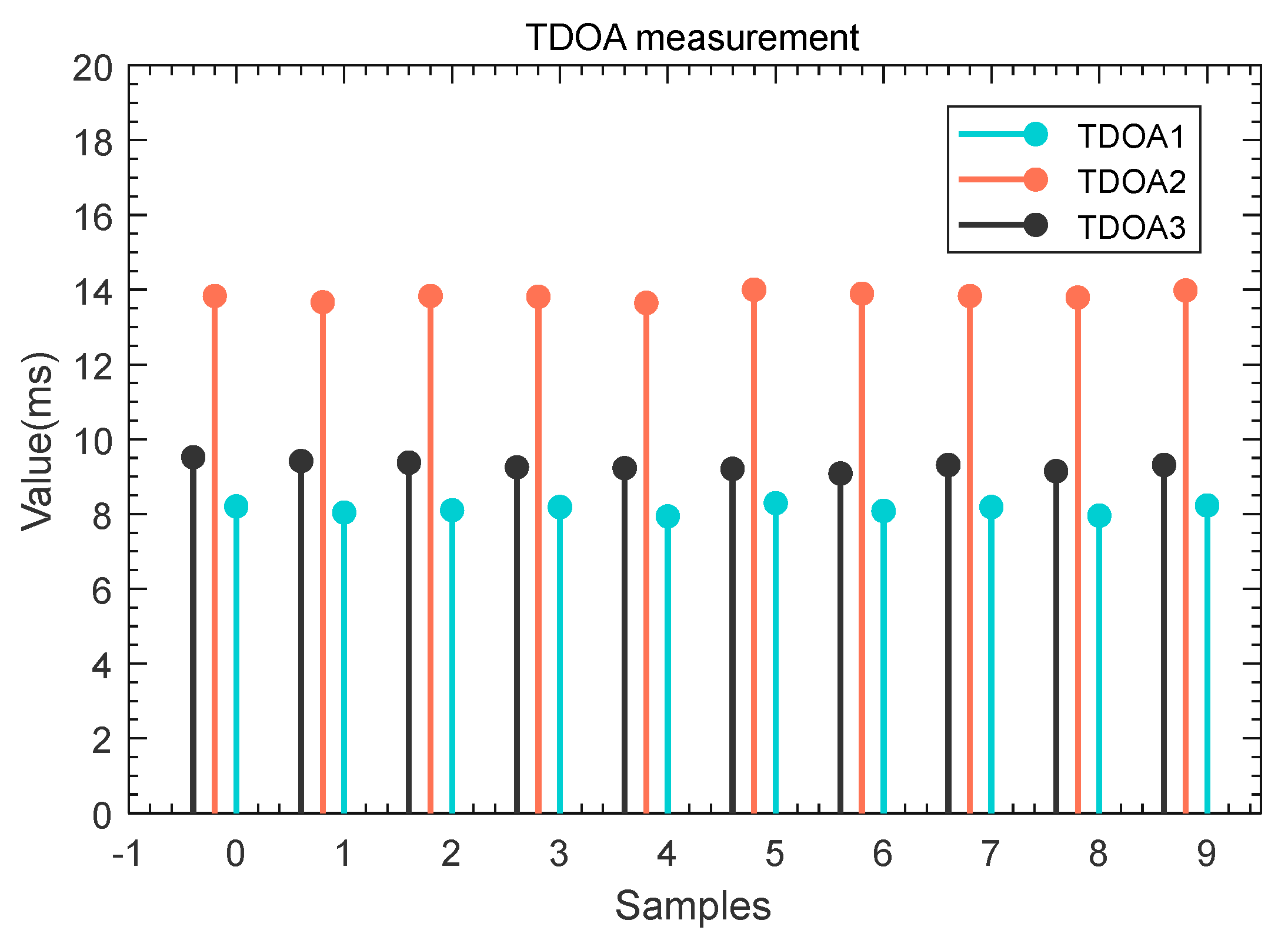
3.2. Robust TDOA Measurement
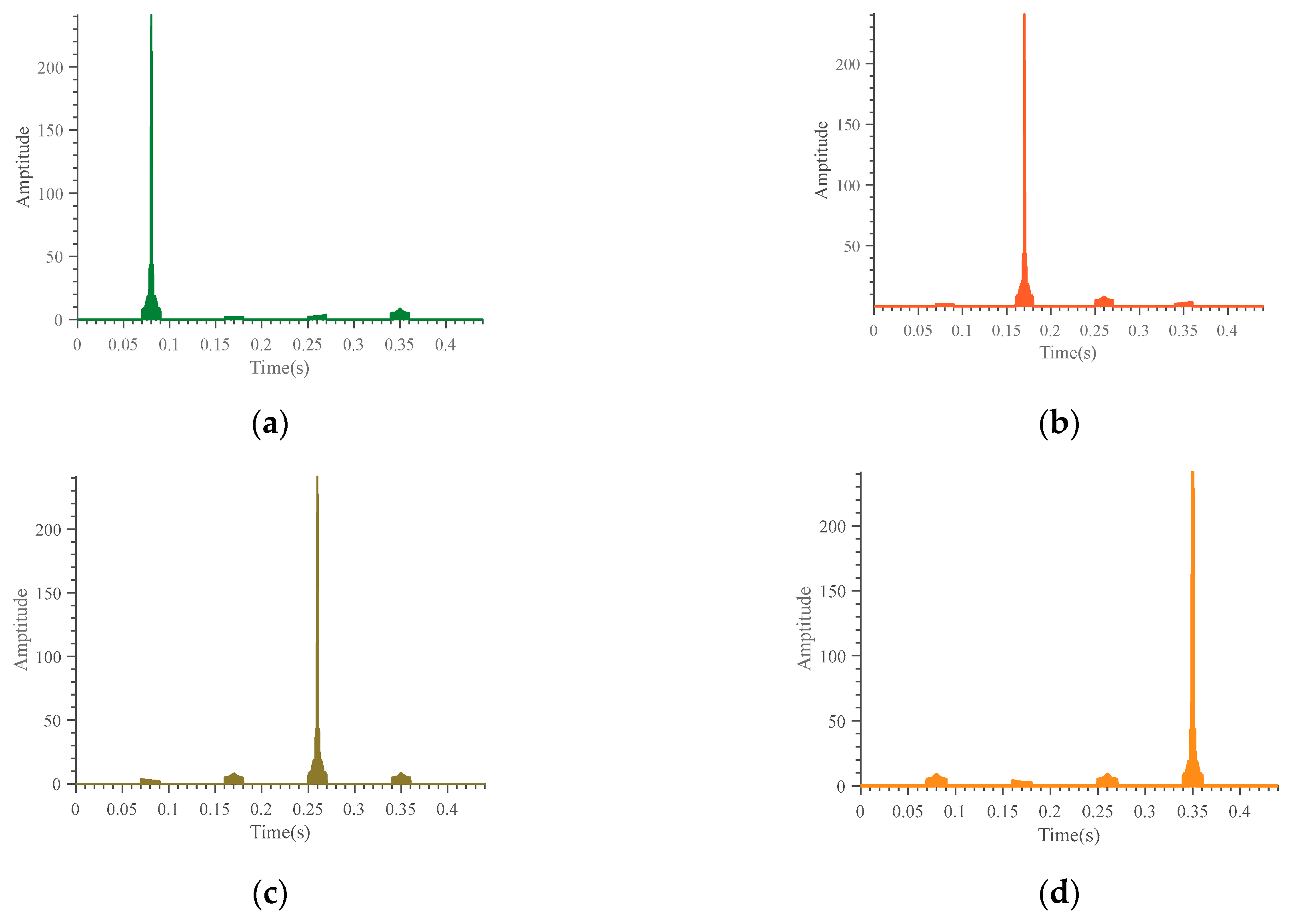
| Algorithm 1. Rough extraction of signal |
| Input: Filtered signal. Output: Rough extraction of signal. 1: Cross-correlation between filtered signal and different prior signals 2: Based on the step 1, different cross-correlation maximum values are obtained 3: TR is the maximum value among all maximum values in step 2. 4: Decoding decision if TR corresponds to the signal that needs to be roughly extracted (1) Find the time corresponding to TR. (2) Rough extraction of signal in the time period (, ). else (1) Find the time corresponding to TR. (2) Assigning acoustic data to 0 in the time period (, ). (3) return to step 1. end if 5: Return: Rough extraction of signal. |
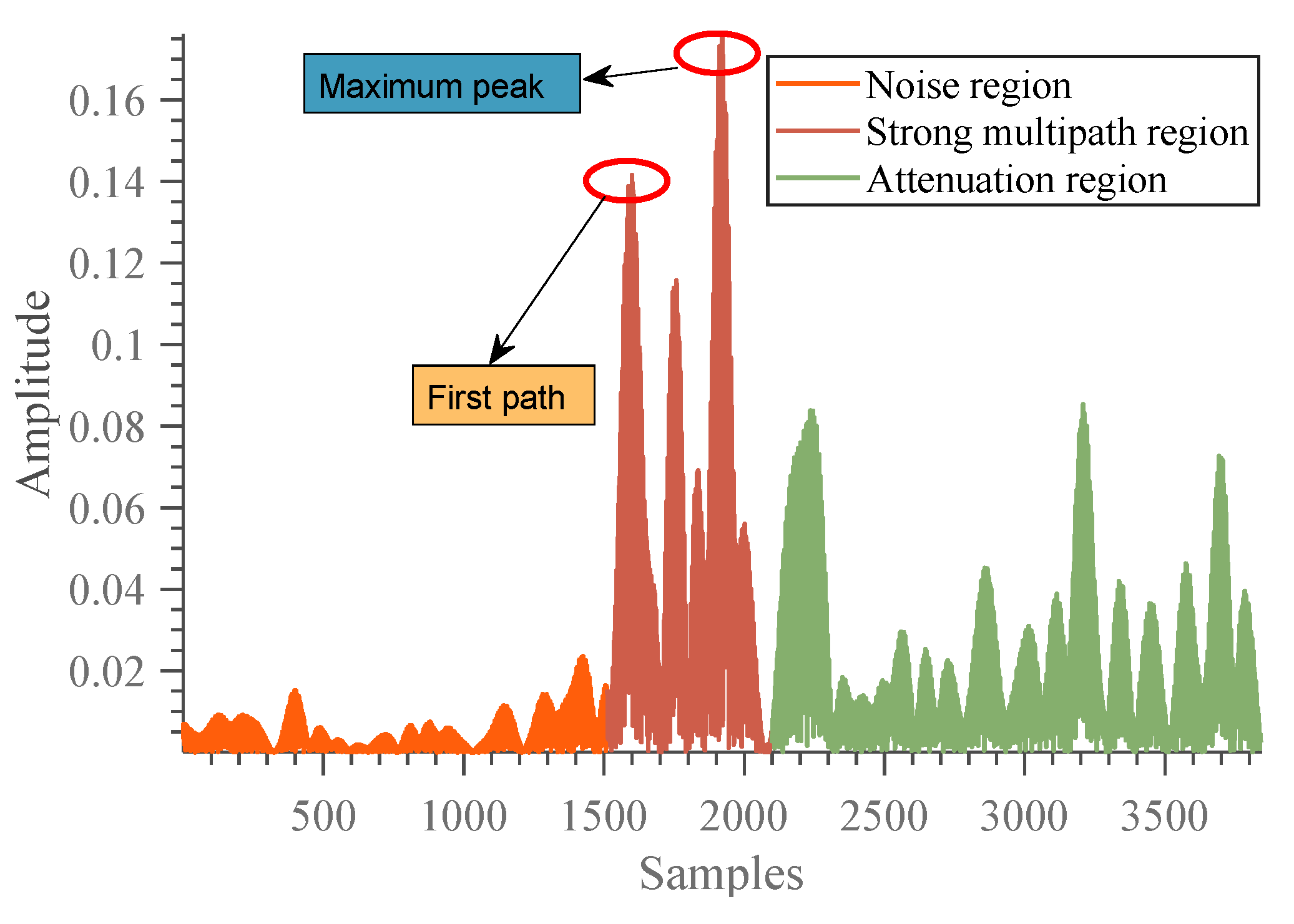
| Algorithm 2. First path extraction |
| Input: . Output: TOA. 1: Set threshold (, is the step size) 2: Set . 3: . 4: Find , n = 1, 2…71. 5: Group decision: (1) Set variable GD = 1, GD represents the number of the group. (2) for n = 1:70 end for for n = 1:69 if < 0.5 ms else GD = GD + 1; ; end if end for (3) Find the proportion of in each group, the proportion is , n = 1,2…GD. (4) Find , n = 1,2…GD. 6: Find TOA: In Group , find the first element as TOA. (Fs refers to the sampling rate of signal, which is set to 48 kHz in this article.) 7: Return: TOA. |
| Algorithm 3. Robust TDOA measurement |
| Input: TOA1 TOA2 TOA3 TOA4. Output: TDOA1 TDOA2 TDOA3. 1: TDOA calculation for = 1:3 . end for 2: Set . ( is the upper limit of abnormality, is set to 40 ms.) 3: Exception elimination for = 1:3 if . end if for n = 1:99 if . end if end for end for 4: Return: TDOA1 TDOA2 TDOA3. |
3.3. Static Robust Positioning Algorithm Base on TODA
4. Experiments and Results
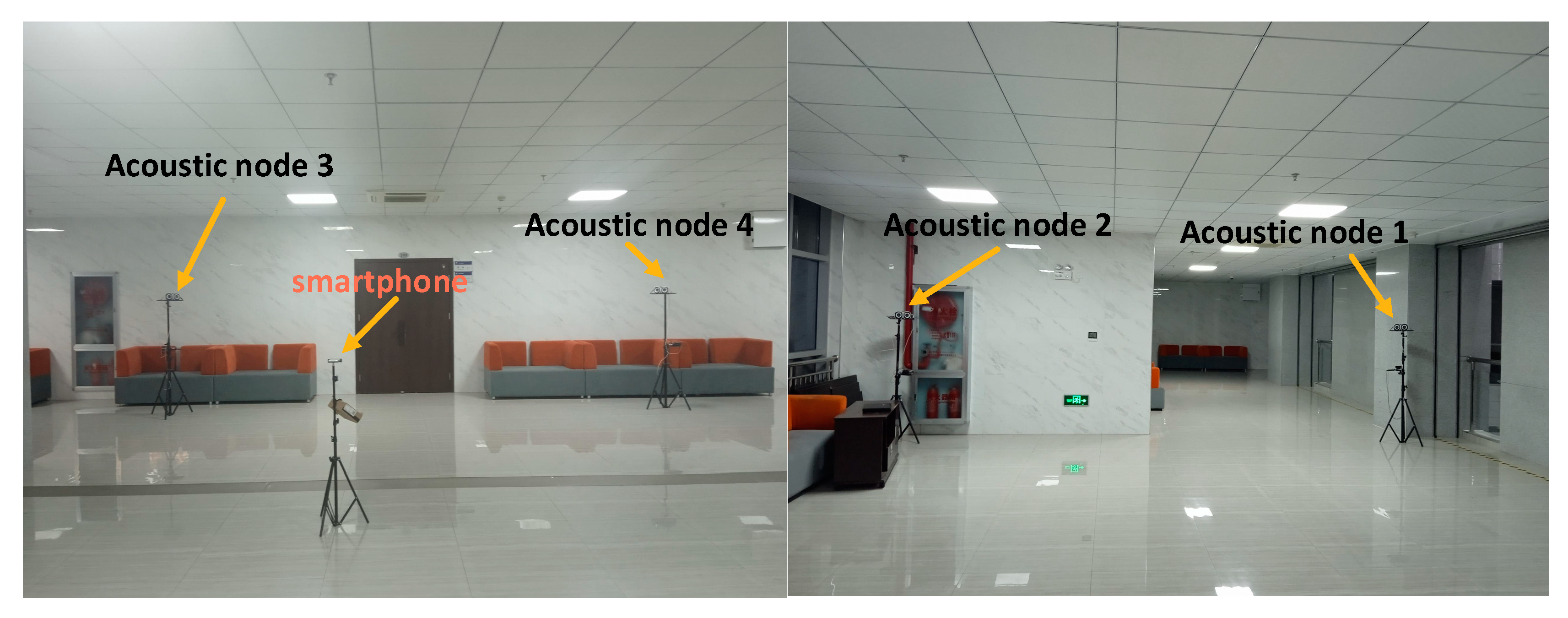
4.1. Experimental Parameters
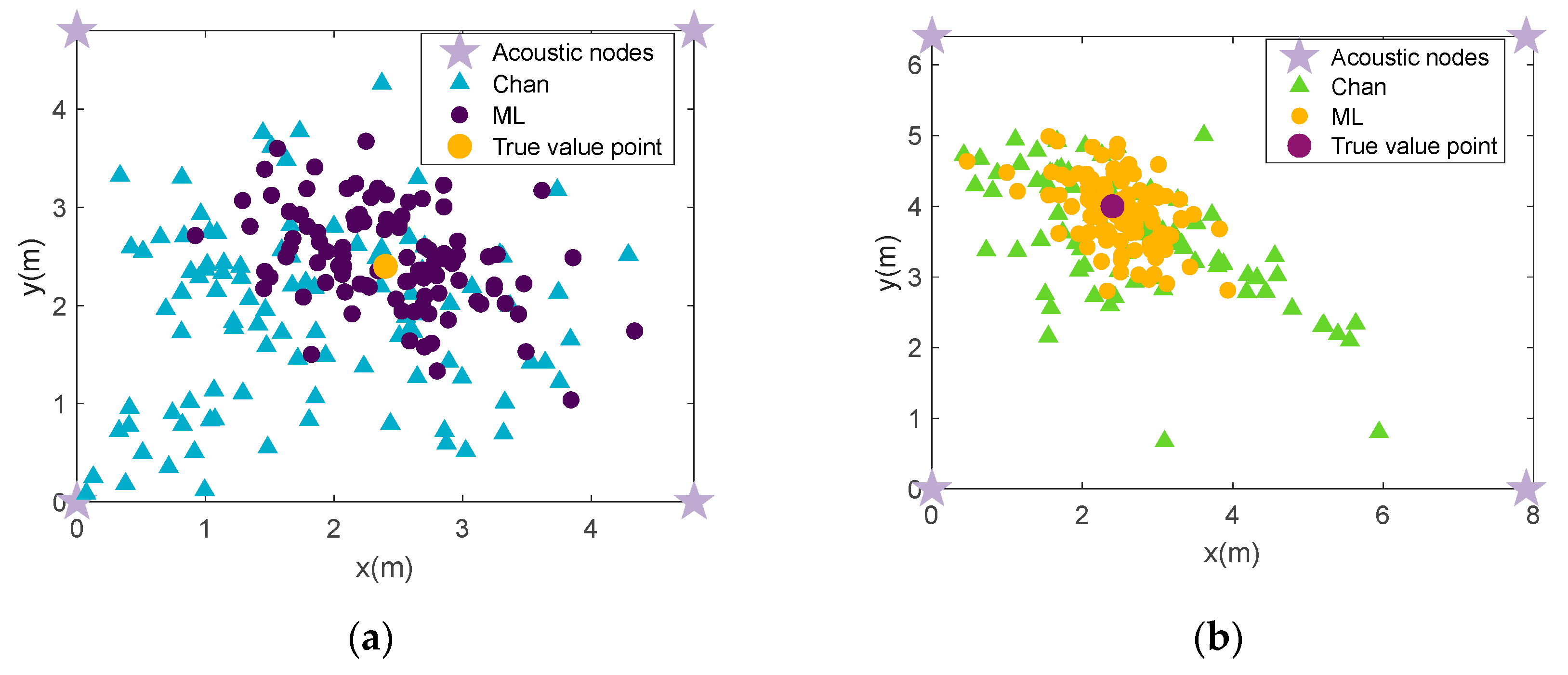
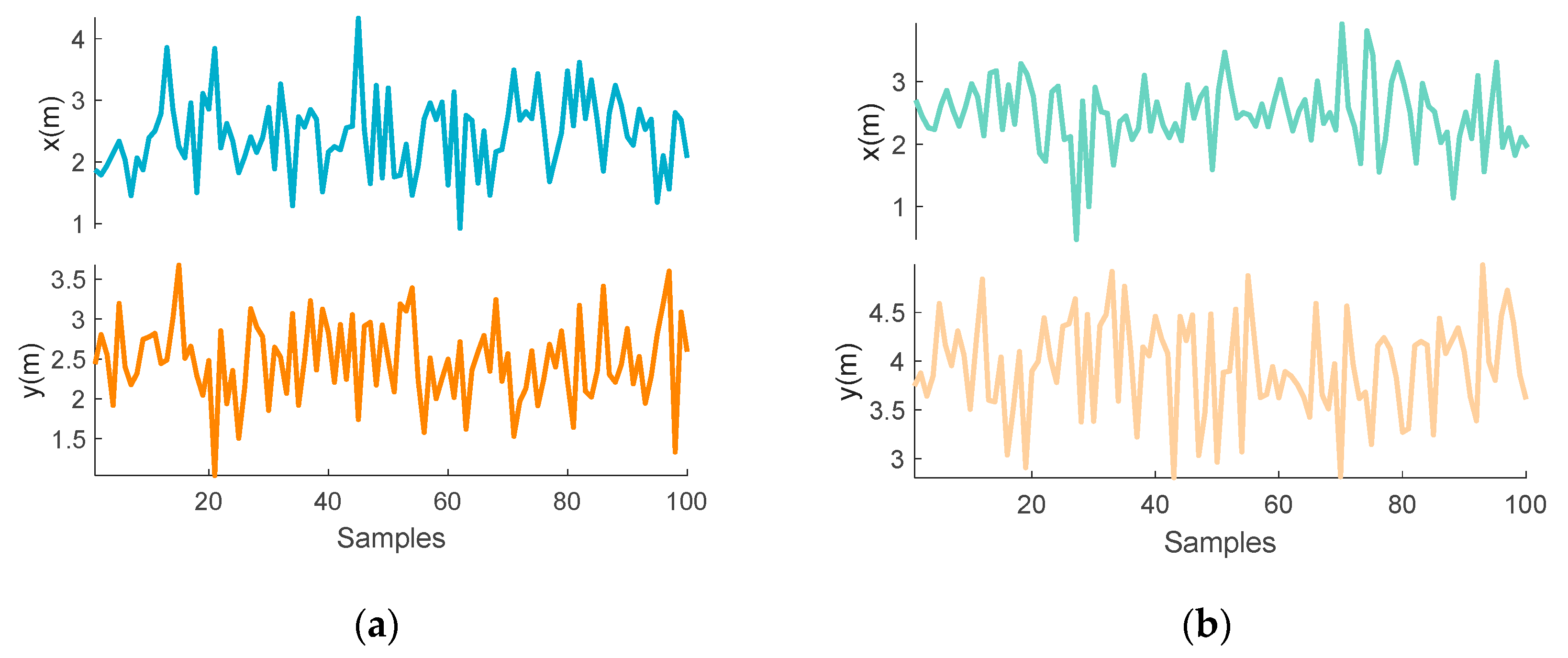
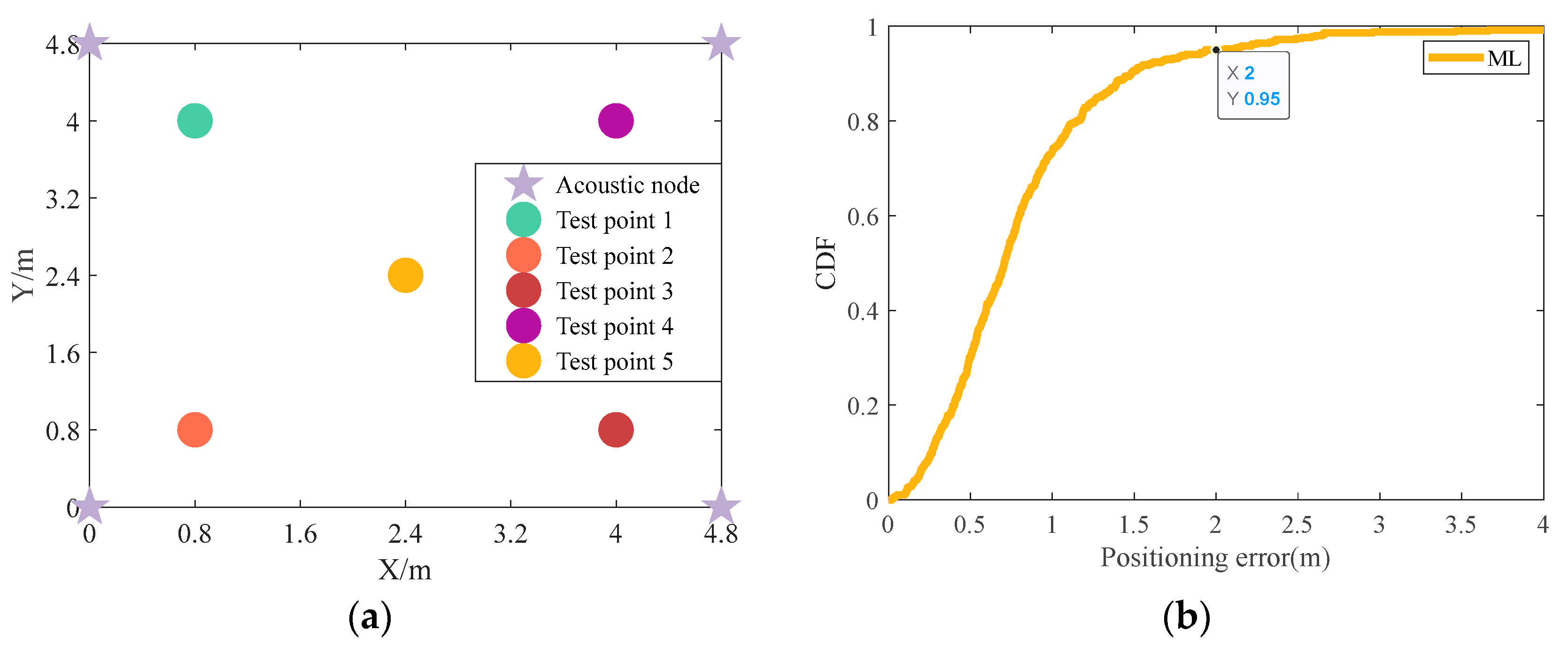
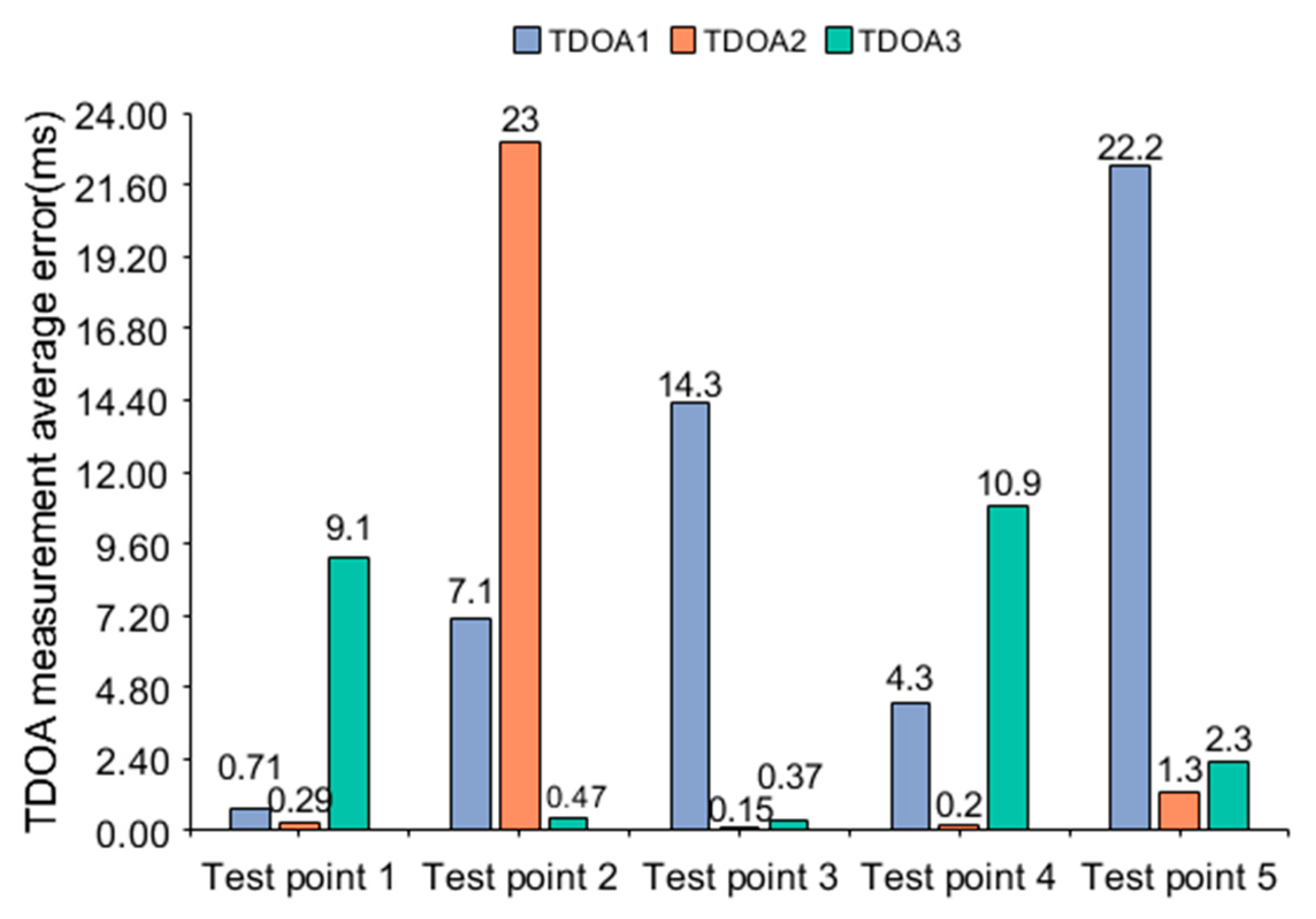
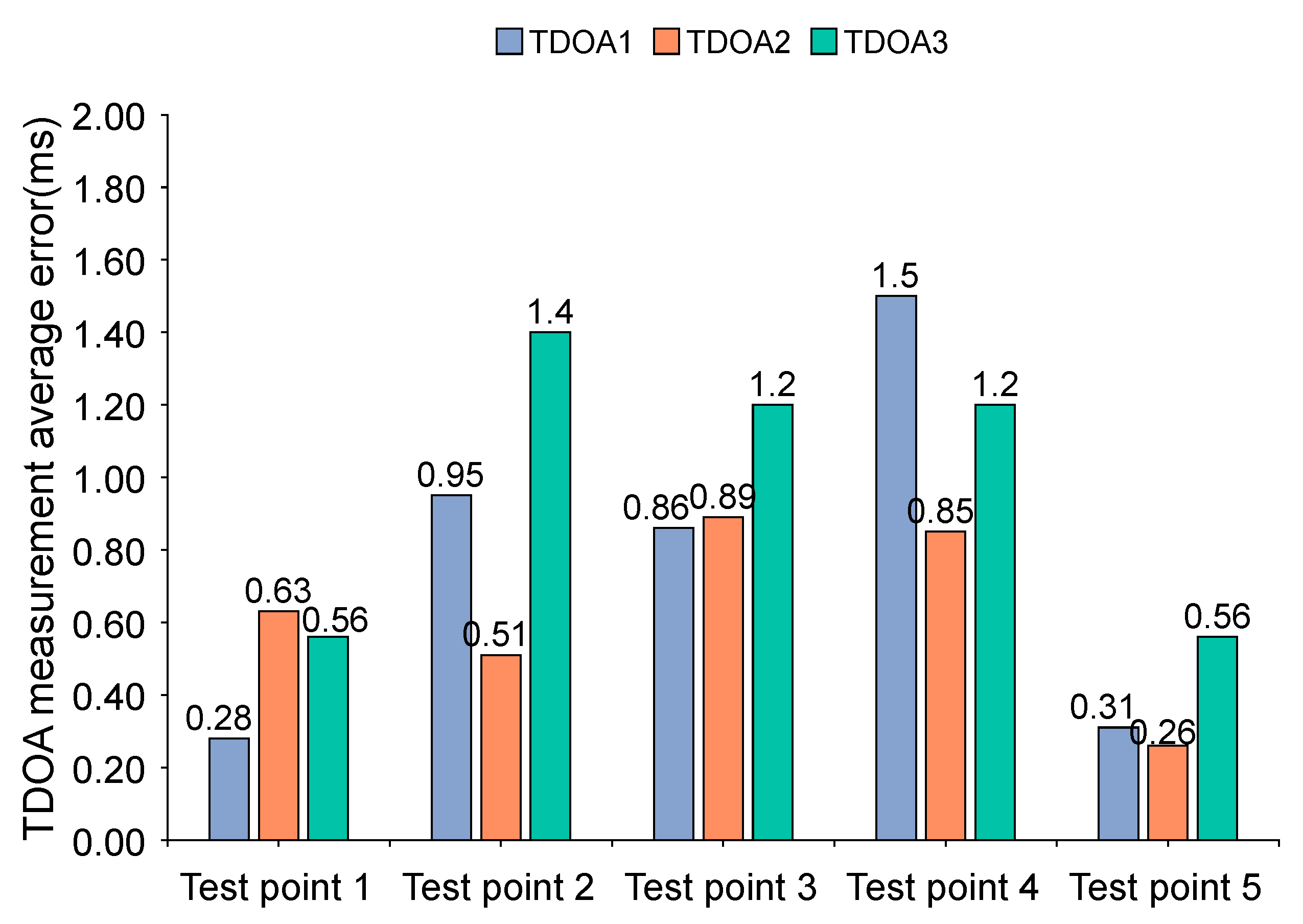
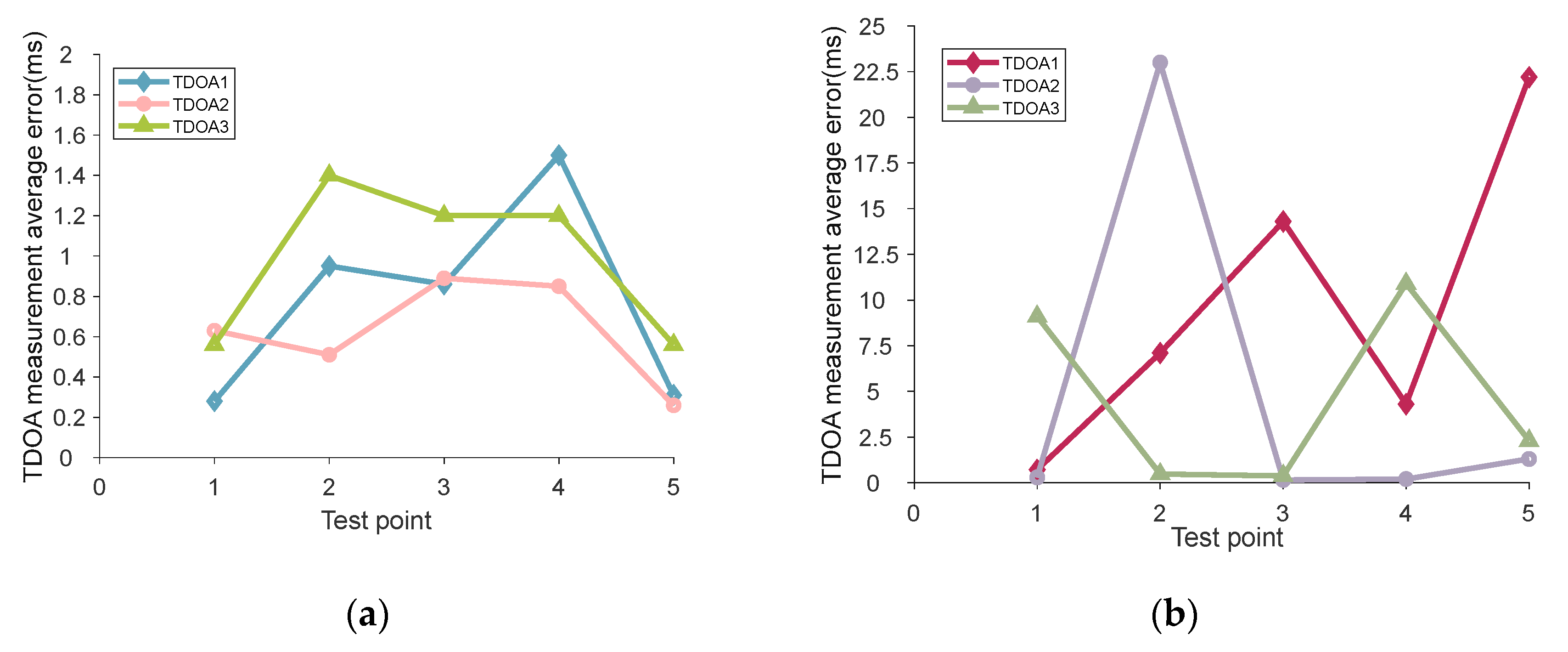
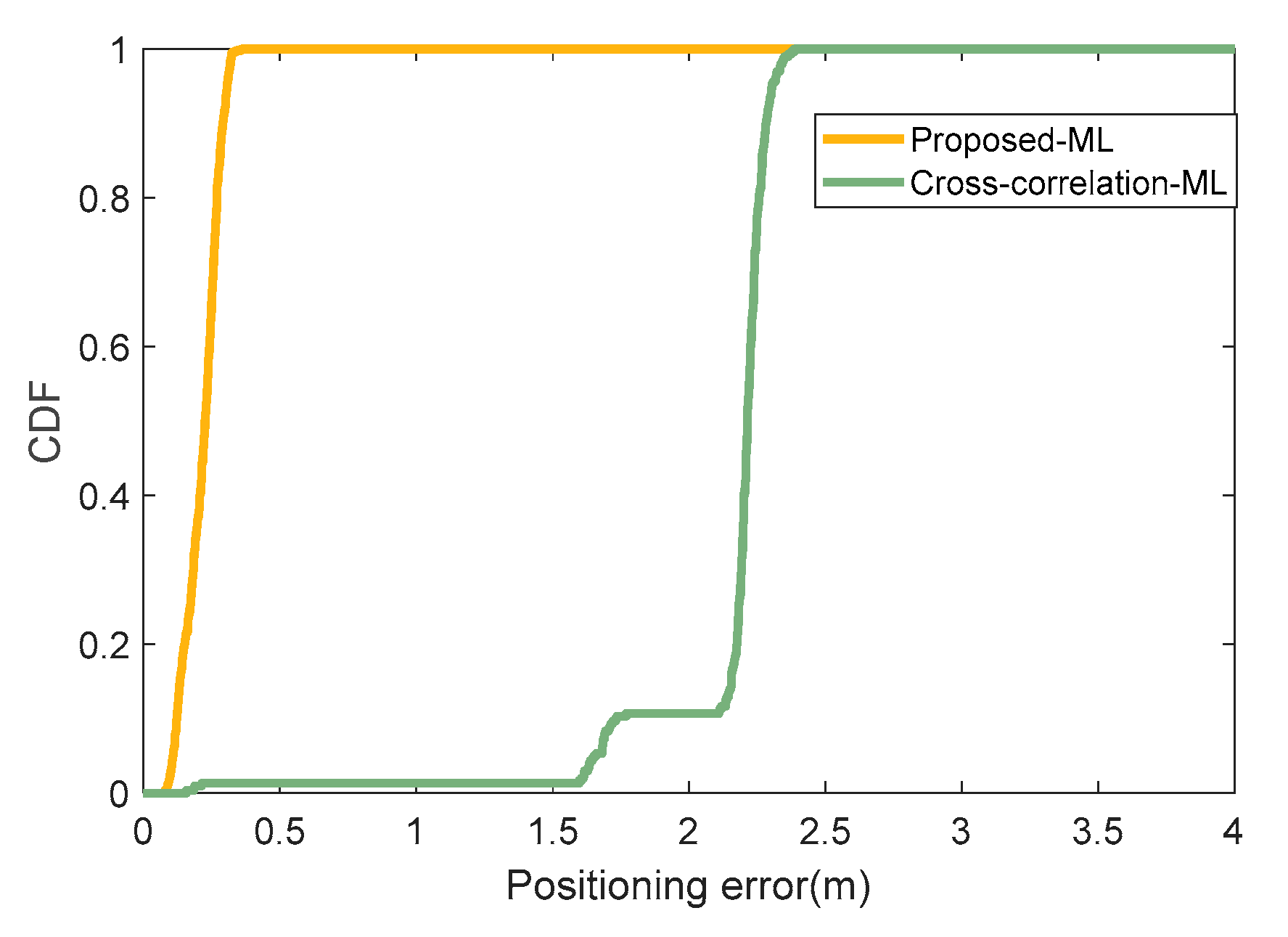
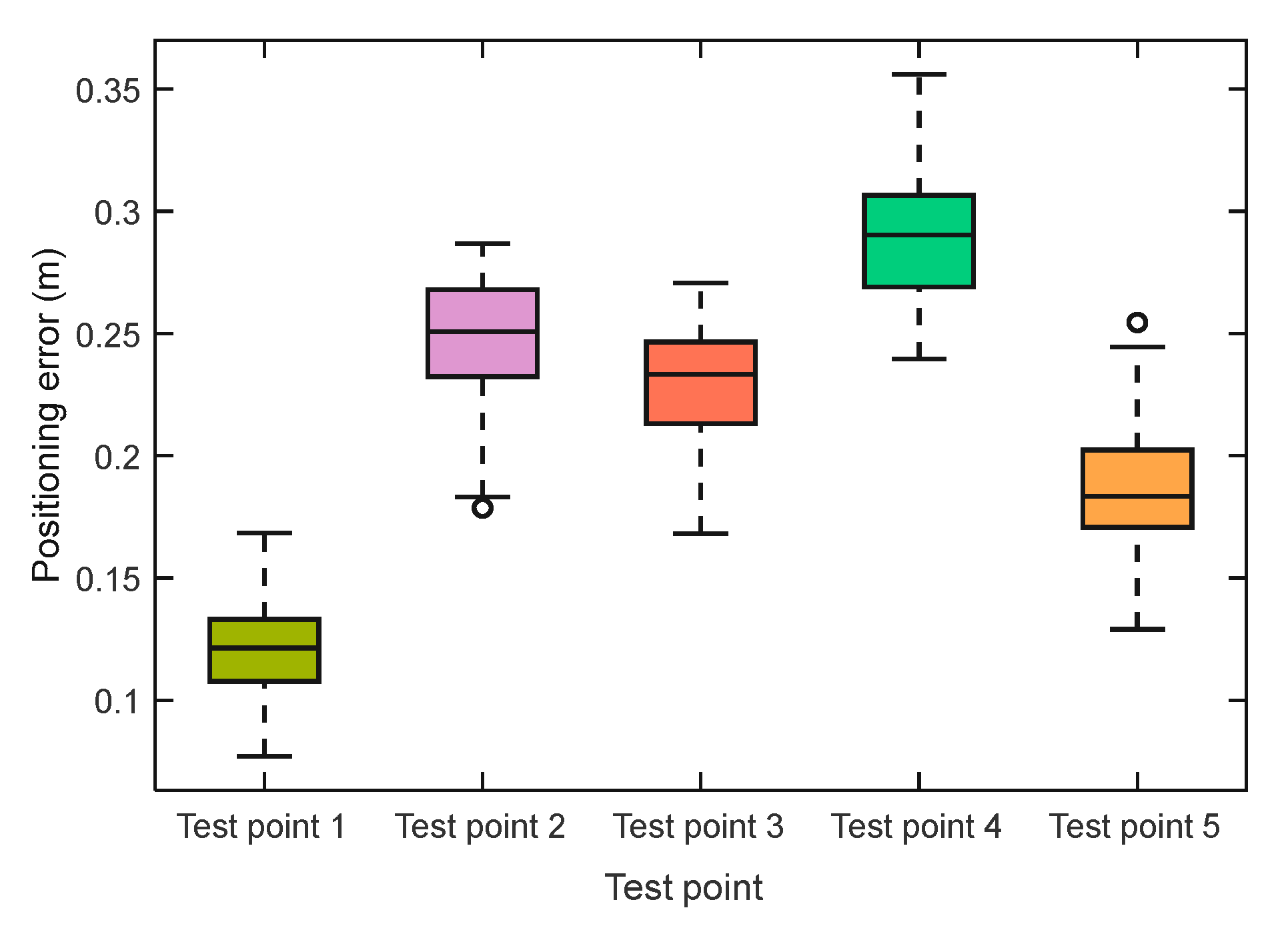
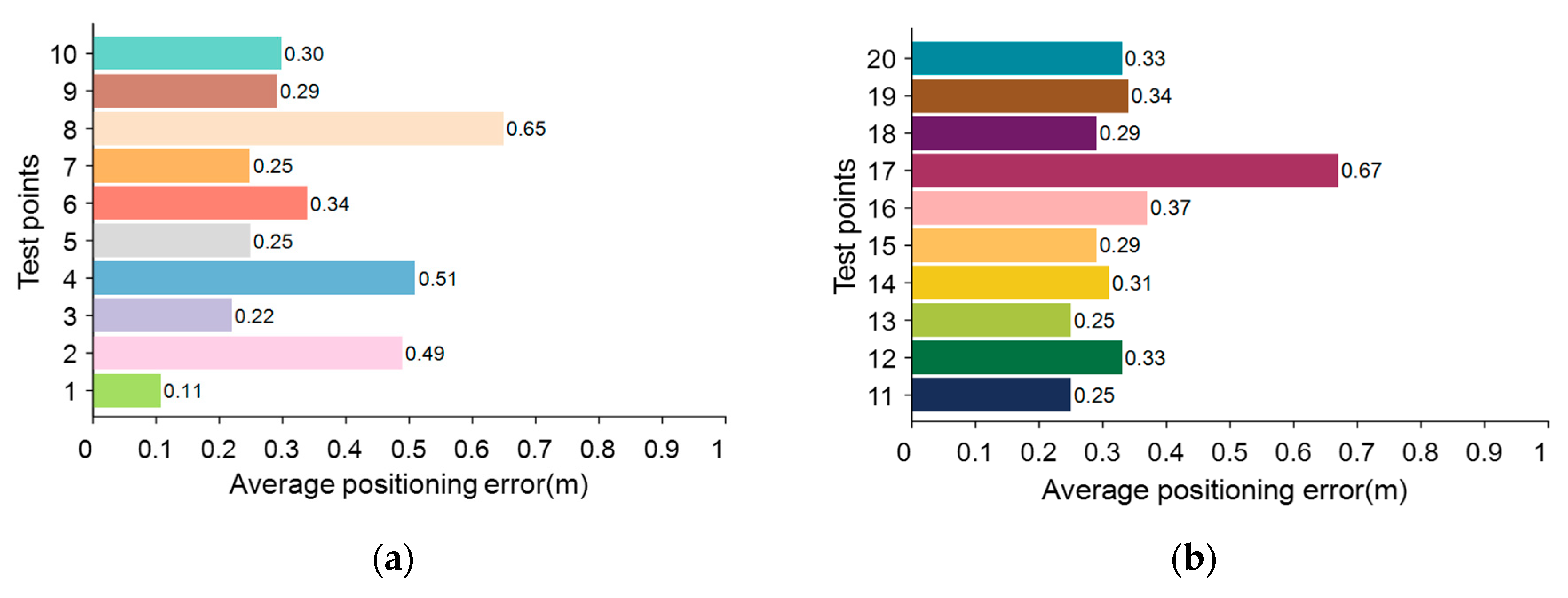
4.2. Experimental Results and Analysis
5. Conclusions
- (1)
- Large scene smartphone positioning: our acoustic nodes are easy to deploy, and we have the ability to achieve positioning in large indoor spaces. However, there is a problem of near-far effect in large indoor spaces. We plan to overcome this problem using the normalization method.
- (2)
- Dynamic positioning: acoustic signal is susceptible to Doppler effects. This issue is something we need to address in the future. We plan to choose methods in the field of communication, such as carrier frequency offset compensation.
- (3)
- Switching between dynamic positioning and static positioning: When performing the positioning function, the user may be in a stationary state or a moving state. In the moving state, we can use an extended Kalman Filter to improve positioning accuracy. We plan to use TOA information to detect movement distance and determine whether it is stationary.
- (4)
- Adaptive extraction of valid acoustic data segments: this article does not study the adaptive extraction method. However, signals from acoustic nodes can be encoded and decoded, which provides the possibility for adaptive extraction.
- (5)
- Smartphone outside of the rectangle of four nodes: When the Smartphone is outside the acoustic nodes, fingerprint positioning can be used. In addition, increasing the number of acoustic nodes and using time-division, space-division, and code-division technologies can also achieve localization.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, M.; Cheng, L.; Qian, K.; Wang, J.; Wang, J.; Liu, Y. Indoor acoustic localization: A survey. Hum. Cent. Comput. Inf. Sci. 2020, 10, 2. [Google Scholar] [CrossRef]
- Lee, M.J.L.; Hsu, L.-T.; Ng, H.-F. Semantic VPS for smartphone localization in challenging urban environments. Sensors 2021, 21, 6137. [Google Scholar] [CrossRef]
- Bi, J.; Zhao, M.; Yao, G.; Cao, H.; Feng, Y.; Jiang, H.; Chai, D. PSOSVRPos: WiFi indoor positioning using SVR optimized by PSO. Expert Syst. Appl. 2023, 222, 119778. [Google Scholar] [CrossRef]
- Peng, P.; Yu, C.; Xia, Q.; Zheng, Z.; Zhao, K.; Chen, W. An Indoor Positioning Method Based on UWB and Visual Fusion. Sensors 2022, 22, 1394. [Google Scholar] [CrossRef]
- Zafari, F.; Gkelias, A.; Leung, K.K. A survey of indoor localization systems and technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef]
- Yeh, S.-C.; Hsu, W.-H.; Lin, W.-Y.; Wu, Y.-F. Study on an indoor positioning system using Earth’s magnetic field. IEEE Trans. Instrum. Meas. 2019, 69, 865–872. [Google Scholar] [CrossRef]
- Huang, B.; Xu, Z.; Jia, B.; Mao, G. An online radio map update scheme for WiFi fingerprint-based localization. IEEE Internet Things J. 2019, 6, 6909–6918. [Google Scholar] [CrossRef]
- Han, K.; Yu, S.M.; Kim, S.-L.; Ko, S.-W. Exploiting user mobility for WiFi RTT positioning: A geometric approach. IEEE Internet Things J. 2021, 8, 14589–14606. [Google Scholar] [CrossRef]
- Yu, Y.; Chen, R.; Chen, L.; Guo, G.; Ye, F.; Liu, Z. A robust dead reckoning algorithm based on Wi-Fi FTM and multiple sensors. Remote Sens. 2019, 11, 504. [Google Scholar] [CrossRef]
- Banin, L.; Bar-Shalom, O.; Dvorecki, N.; Amizur, Y. Scalable Wi-Fi client self-positioning using cooperative FTM-sensors. IEEE Trans. Instrum. Meas. 2018, 68, 3686–3698. [Google Scholar] [CrossRef]
- Kumar, S.; Kaltenberger, F.; Ramirez, A.; Kloiber, B. An SDR implementation of WiFi receiver for mitigating multiple co-channel ZigBee interferers. EURASIP J. Wirel. Commun. Netw. 2019, 2019, 224. [Google Scholar] [CrossRef]
- Alavi, B.; Pahlavan, K. Modeling of the TOA-based distance measurement error using UWB indoor radio measurements. IEEE Commun. Lett. 2006, 10, 275–277. [Google Scholar] [CrossRef]
- Pfeil, R.; Pichler, M.; Schuster, S.; Hammer, F. Robust acoustic positioning for safety applications in underground mining. IEEE Trans. Instrum. Meas. 2015, 64, 2876–2888. [Google Scholar] [CrossRef]
- Oloumi, D.; Rambabu, K. Metal-cased oil well inspection using near-field UWB radar imaging. IEEE Trans. Geosci. Remote Sens. 2018, 56, 5884–5892. [Google Scholar] [CrossRef]
- Zhang, W.; Chowdhury, M.S.; Kavehrad, M. Asynchronous indoor positioning system based on visible light communications. Opt. Eng. 2014, 53, 045105. [Google Scholar] [CrossRef]
- Yasir, M.; Ho, S.-W.; Vellambi, B.N. Indoor positioning system using visible light and accelerometer. J. Light. Technol. 2014, 32, 3306–3316. [Google Scholar] [CrossRef]
- Jung, S.-Y.; Hann, S.; Park, C.-S. TDOA-based optical wireless indoor localization using LED ceiling lamps. IEEE Trans. Consum. Electron. 2011, 57, 1592–1597. [Google Scholar] [CrossRef]
- Yang, S.-H.; Kim, H.-S.; Son, Y.-H.; Han, S.-K. Three-dimensional visible light indoor localization using AOA and RSS with multiple optical receivers. J. Light. Technol. 2014, 32, 2480–2485. [Google Scholar] [CrossRef]
- Alam, F.; Chew, M.T.; Wenge, T.; Gupta, G.S. An accurate visible light positioning system using regenerated fingerprint database based on calibrated propagation model. IEEE Trans. Instrum. Meas. 2018, 68, 2714–2723. [Google Scholar] [CrossRef]
- Xie, C.; Guan, W.; Wu, Y.; Fang, L.; Cai, Y. The LED-ID detection and recognition method based on visible light positioning using proximity method. IEEE Photonics J. 2018, 10, 7902116. [Google Scholar] [CrossRef]
- Abou-Shehada, I.M.; AlMuallim, A.F.; AlFaqeh, A.K.; Muqaibel, A.H.; Park, K.-H.; Alouini, M.-S. Accurate Indoor Visible Light Positioning Using a Modified Pathloss Model with Sparse Fingerprints. J. Light. Technol. 2021, 39, 6487–6497. [Google Scholar] [CrossRef]
- Lee, S.; Chae, S.; Han, D. ILoA: Indoor localization using augmented vector of geomagnetic field. IEEE Access 2020, 8, 184242–184255. [Google Scholar] [CrossRef]
- Ashraf, I.; Din, S.; Hur, S.; Kim, G.; Park, Y. Empirical Overview of Benchmark Datasets for Geomagnetic Field-Based Indoor Positioning. Sensors 2021, 21, 3533. [Google Scholar] [CrossRef] [PubMed]
- Sun, M.; Wang, Y.; Xu, S.; Yang, H.; Zhang, K. Indoor geomagnetic positioning using the enhanced genetic algorithm-based extreme learning machine. IEEE Trans. Instrum. Meas. 2021, 70, 2508611. [Google Scholar] [CrossRef]
- Sertatıl, C.; Altınkaya, M.A.; Raoof, K. A novel acoustic indoor localization system employing CDMA. Digit. Signal Process. 2012, 22, 506–517. [Google Scholar] [CrossRef]
- Liu, Z.; Chen, R.; Ye, F.; Guo, G.; Li, Z.; Qian, L. Improved TOA estimation method for acoustic ranging in a reverberant environment. IEEE Sens. J. 2020. [CrossRef]
- Cai, C.; Hu, M.; Ma, X.; Peng, K.; Liu, J. Accurate Ranging on Acoustic-Enabled IoT Devices. IEEE Internet Things J. 2019, 6, 3164–3174. [Google Scholar] [CrossRef]
- Cai, C.; Hu, M.; Cao, D.; Ma, X.; Li, Q.; Liu, J. Self-deployable indoor localization with acoustic-enabled IoT devices exploiting participatory sensing. IEEE Internet Things J. 2019, 6, 5297–5311. [Google Scholar] [CrossRef]
- Bordoy, J.; Schindelhauer, C.; Höflinger, F.; Reindl, L.M. Exploiting acoustic echoes for smartphone localization and microphone self-calibration. IEEE Trans. Instrum. Meas. 2019, 69, 1484–1492. [Google Scholar] [CrossRef]
- Zhang, L.; Chen, M.; Wang, X.; Wang, Z. TOA estimation of chirp signal in dense multipath environment for low-cost acoustic ranging. IEEE Trans. Instrum. Meas. 2018, 68, 355–367. [Google Scholar] [CrossRef]
- Song, X.; Wang, M.; Qiu, H.; Li, K.; Ang, C. Auditory scene analysis-based feature extraction for indoor subarea localization using smartphones. IEEE Sens. J. 2019, 19, 6309–6316. [Google Scholar] [CrossRef]
- Aguilera, T.; Aranda, F.J.; Parralejo, F.; Gutiérrez, J.D.; Moreno, J.A.; Álvarez, F.J. Noise-Resilient Acoustic Low Energy Beacon for Proximity-Based Indoor Positioning Systems. Sensors 2021, 21, 1703. [Google Scholar] [CrossRef]
- Chen, X.; Chen, Y.; Cao, S.; Zhang, L.; Zhang, X.; Chen, X. Acoustic Indoor Localization System Integrating TDMA+FDMA Transmission Scheme and Positioning Correction Technique. Sensors 2019, 19, 2353. [Google Scholar] [CrossRef] [PubMed]
- Qiu, Y.; Li, B.; Huang, J.; Jiang, Y.; Wang, B.; Huang, Z. An Analytical Method for 3-D Sound Source Localization Based on a Five-Element Microphone Array. IEEE Trans. Instrum. Meas. 2022, 71, 7504314. [Google Scholar] [CrossRef]
- Chung, M.-A.; Chou, H.-C.; Lin, C.-W. Sound Localization Based on Acoustic Source Using Multiple Microphone Array in an Indoor Environment. Electronics 2022, 11, 890. [Google Scholar] [CrossRef]
- Xing, H.; Yang, X. Sound source localization fusion algorithm and performance analysis of a three-plane five-element microphone array. Appl. Sci. 2019, 9, 2417. [Google Scholar] [CrossRef]
- Manamperi, W.; Abhayapala, T.D.; Zhang, J.; Samarasinghe, P.N. Drone audition: Sound source localization using on-board microphones. IEEE/ACM Trans. Audio Speech Lang. Process. 2022, 30, 508–519. [Google Scholar] [CrossRef]
- Go, Y.-J.; Choi, J.-S. An acoustic source localization method using a drone-mounted phased microphone array. Drones 2021, 5, 75. [Google Scholar] [CrossRef]
- Wang, S.; Yang, P.; Sun, H. Sound Source Localization Indoors Based on Two-Level Reference Points Matching. Appl. Sci. 2022, 12, 9956. [Google Scholar] [CrossRef]
- Liu, Z.Y.; Chen, R.Z.; Ye, F.; Guo, G.Y.; Li, Z.; Qian, L. Time-of-arrival estimation for smartphones based on built-in microphone sensor. Electron. Lett. 2020, 56, 1280–1283. [Google Scholar] [CrossRef]
- Toru, I.; Yasuda, Y.; Sato, S.; Izumi, S.; Kawaguchi, H. Millimeter-Precision Ultrasonic DSSS Positioning Technique with Geometric Triangle Constraint. IEEE Sens. J. 2022, 22, 16202–16211. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acoustic Node | Frequency Range | Signal Type | Duration |
|---|---|---|---|
| node 1 | 15–16 kHz | down | 10 ms |
| node 2 | 16.5–17.5 kHz | up | 10 ms |
| node 3 | 18–19 kHz | down | 10 ms |
| node 4 | 19.5–20.5 kHz | up | 10 ms |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, B.; Wu, J. Acoustic TDOA Measurement and Accurate Indoor Positioning for Smartphone. Future Internet 2023, 15, 240. https://doi.org/10.3390/fi15070240
Cheng B, Wu J. Acoustic TDOA Measurement and Accurate Indoor Positioning for Smartphone. Future Internet. 2023; 15(7):240. https://doi.org/10.3390/fi15070240
Chicago/Turabian StyleCheng, Bingbing, and Jiao Wu. 2023. "Acoustic TDOA Measurement and Accurate Indoor Positioning for Smartphone" Future Internet 15, no. 7: 240. https://doi.org/10.3390/fi15070240
APA StyleCheng, B., & Wu, J. (2023). Acoustic TDOA Measurement and Accurate Indoor Positioning for Smartphone. Future Internet, 15(7), 240. https://doi.org/10.3390/fi15070240