
Energy Consumption Reduction in Wireless Sensor Network-Based Water Pipeline Monitoring Systems via Energy Conservation Techniques



Abstract
1. Introduction
1.1. Green Wireless Sensor Networks
1.2. Energy Management Techniques for Extending WSN Lifetime
1.3. Review of Energy Management Techniques for Extending the Lifespan of WWPM Systems
1.4. Objective
2. Materials and Methods
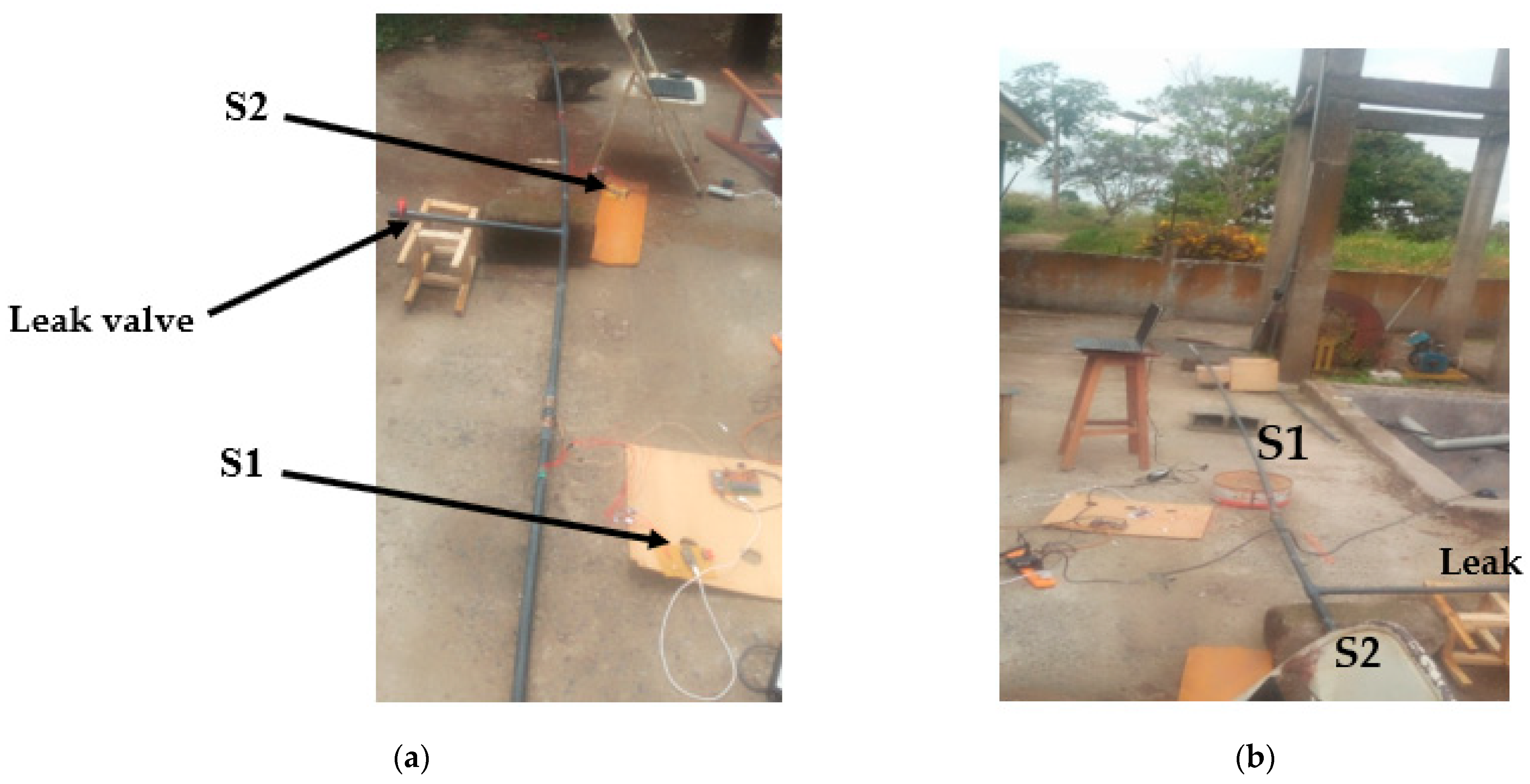
2.1. Experimental Setup
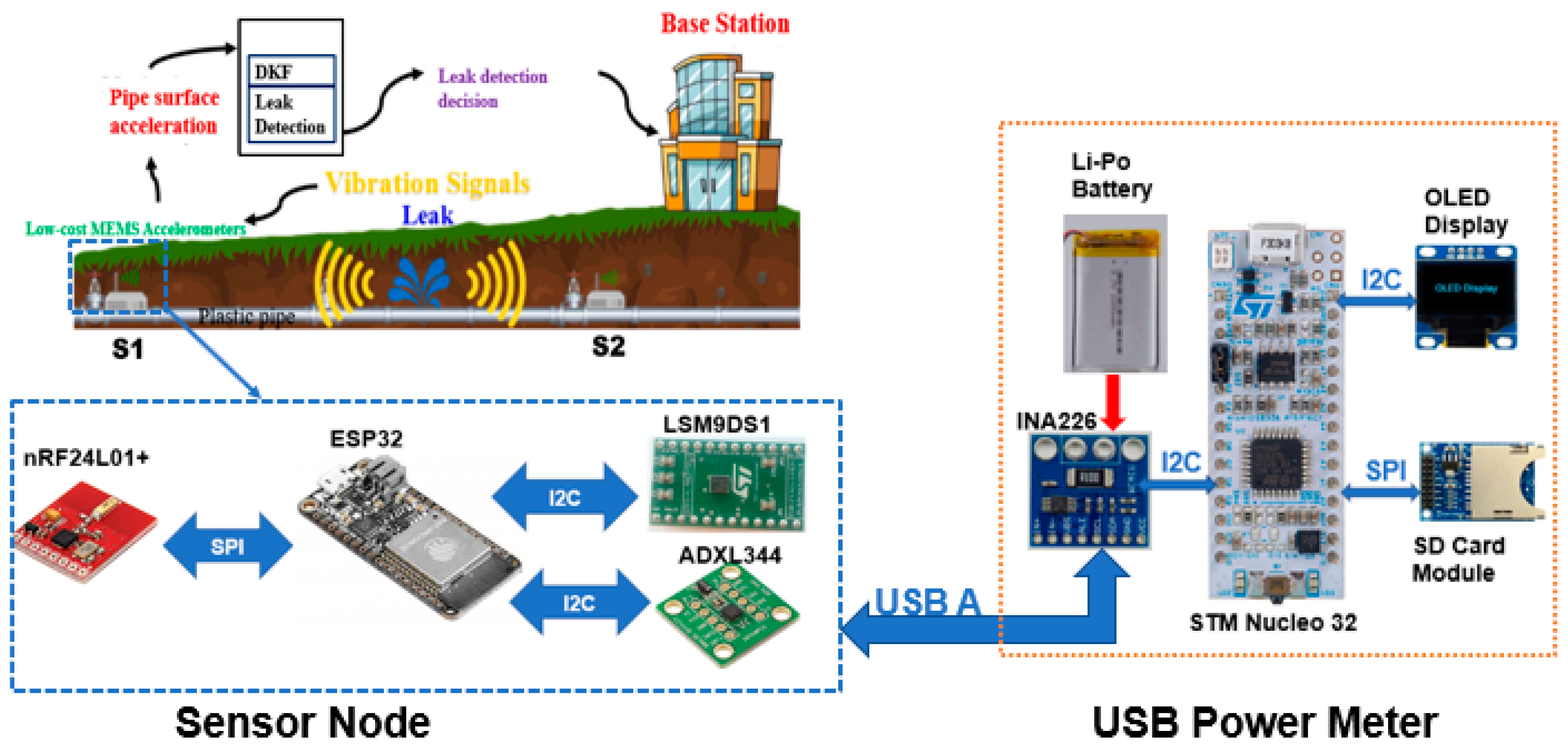
2.2. Sensor Node Components
2.3. Energy Measurement
2.4. Battery Lifetime Estimation
3. Energy Consumption of Distributed Solutions under Different Scenarios
3.1. Distributed Computing on WWPM Systems
3.2. Scenario 1
3.3. Scenario 2
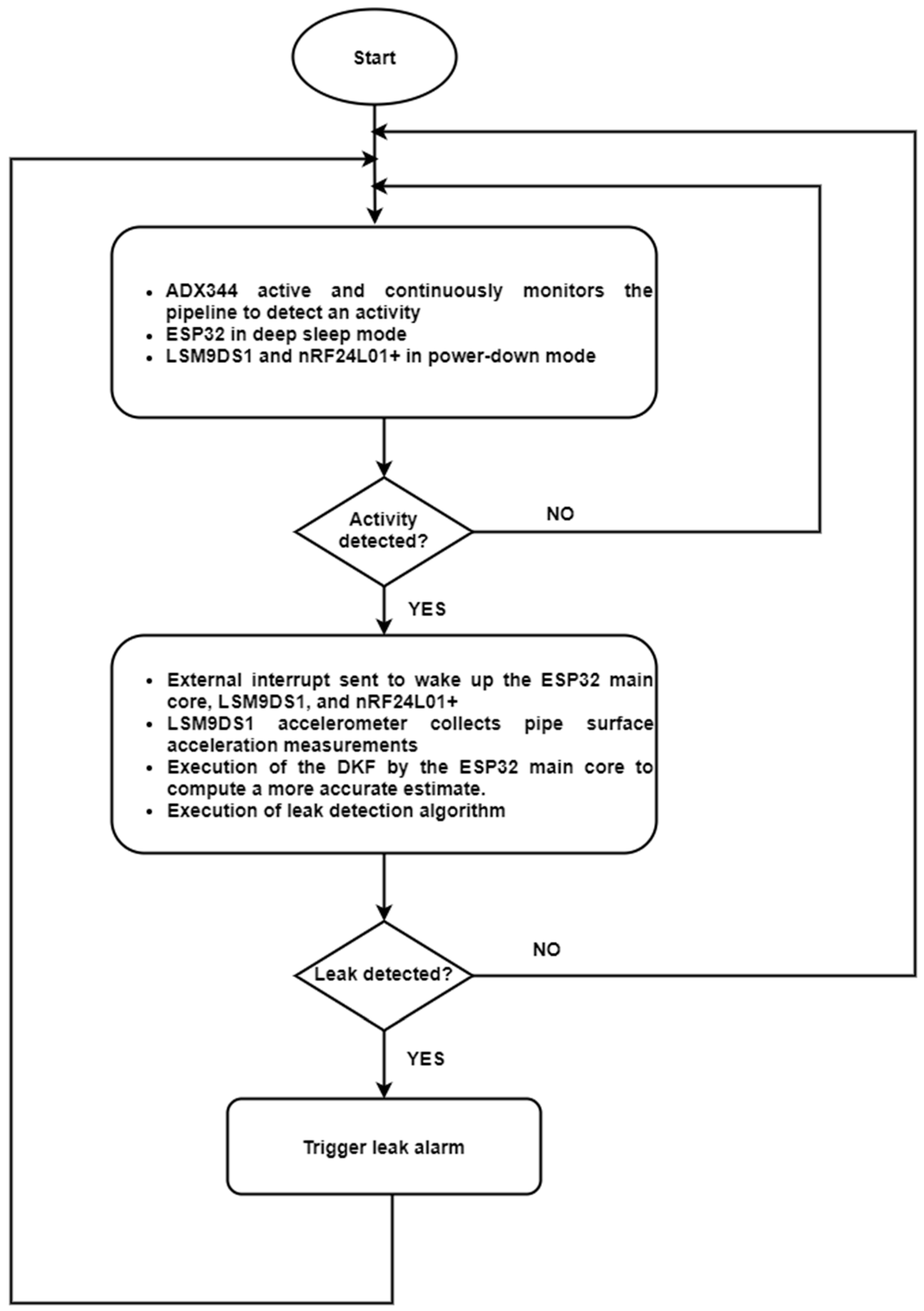
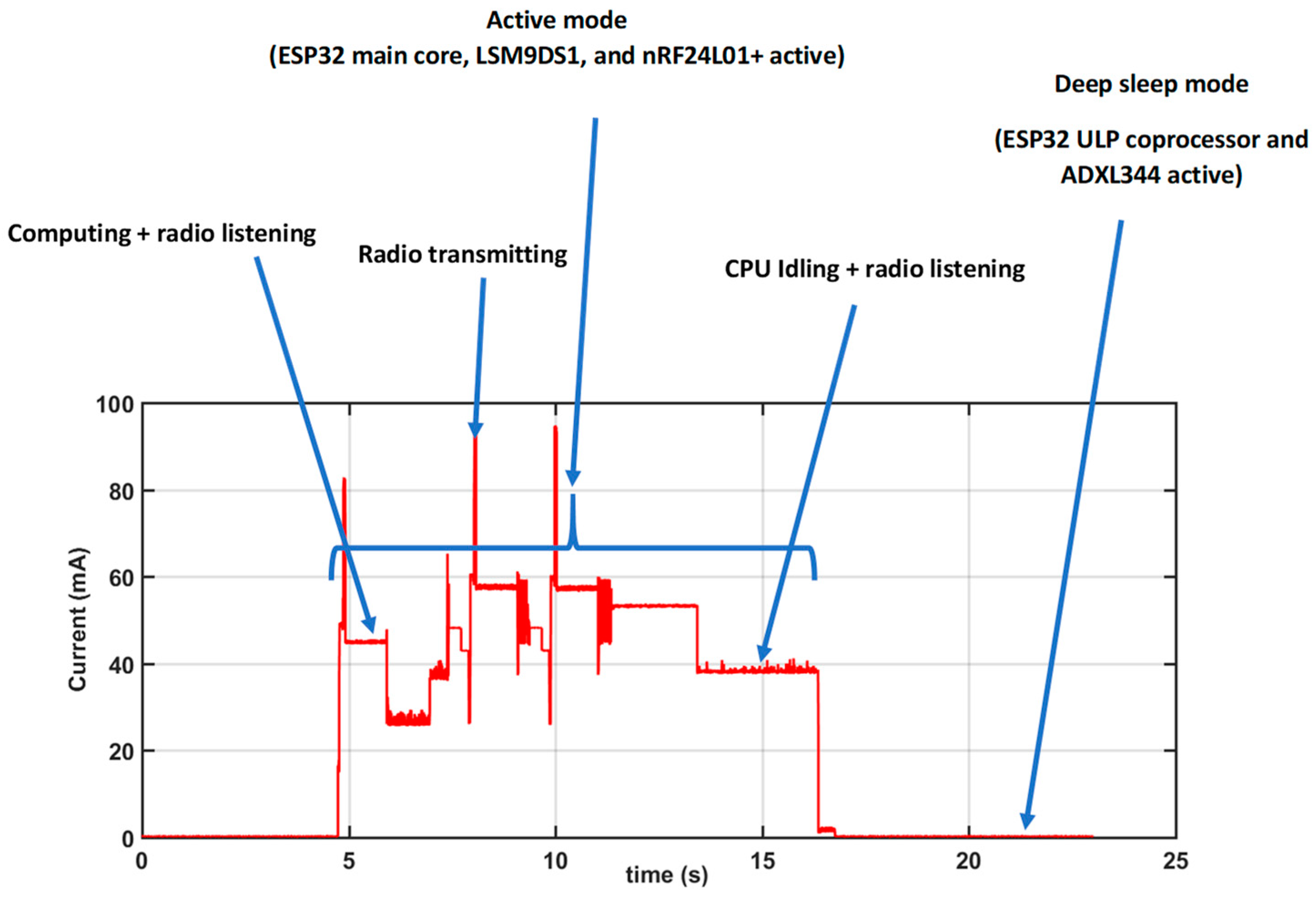
- On starting, the main core of the ESP32 is in deep sleep mode and the nRF24L01+ and LSM9DS1 are in the power down mode, while the ESP32 ULP and ADXL344 are in the active mode.
- The ADXL344 continuously monitors the pipeline to detect an activity. An activity (a leak event) is detected once the measured acceleration is above the predefined threshold value (1.01 g) that is stored in the activity register of the ADXL344 accelerometer. Once an activity is detected, an external interrupt is sent to wake up the other components of the sensor node.
- When no activity is detected by the ADXL344 accelerometer, the ESP32 stays in the deep sleep mode with the ULP coprocessor active, while the nRF24L01+ transceiver and the LSM9DS1 accelerometer both remain in the power-down mode.
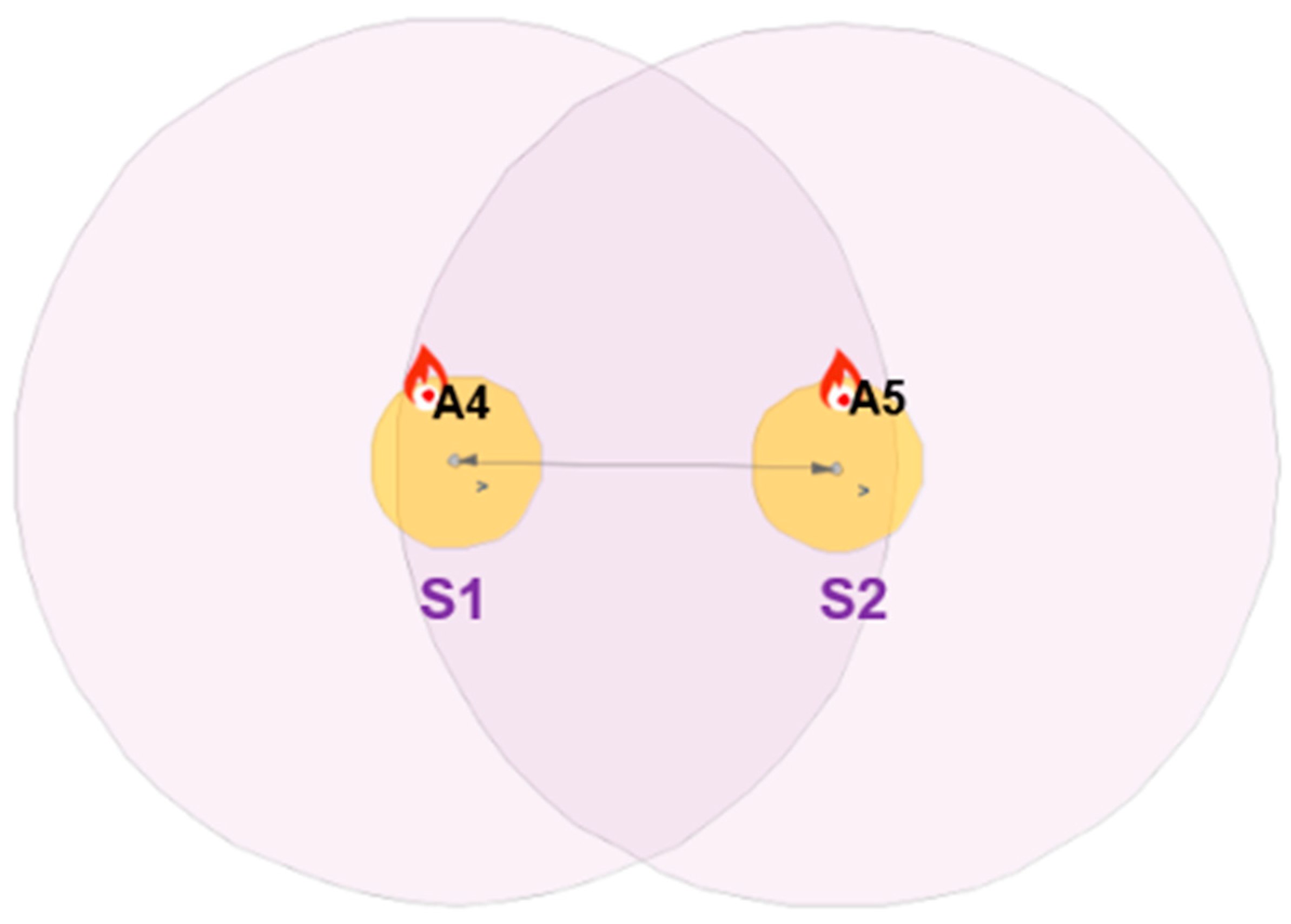
- Once an activity is detected, the ADXL344 triggers a wake-up interrupt to the ESP32, LSM9DS1, and nRF24L01+. The LSM9DS1 wakes up and collects more accurate measurements. The measurements are then processed by the ESP32 main core by running the DKF algorithm. The nRF24L01+ is used to communicate the local estimates of the sensor node to its direct neighbours to achieve distributed data fusion.
- Once the fusion of local estimates from neighbouring nodes has been performed, the computed estimate is then compared with the baseline value for leak detection. If the final estimate exceeds the baseline value by some threshold value, then a leak alarm is triggered and the node goes back to sleep. Otherwise, no leak alarm is triggered and the node goes back to sleep.
4. Results and Discussion
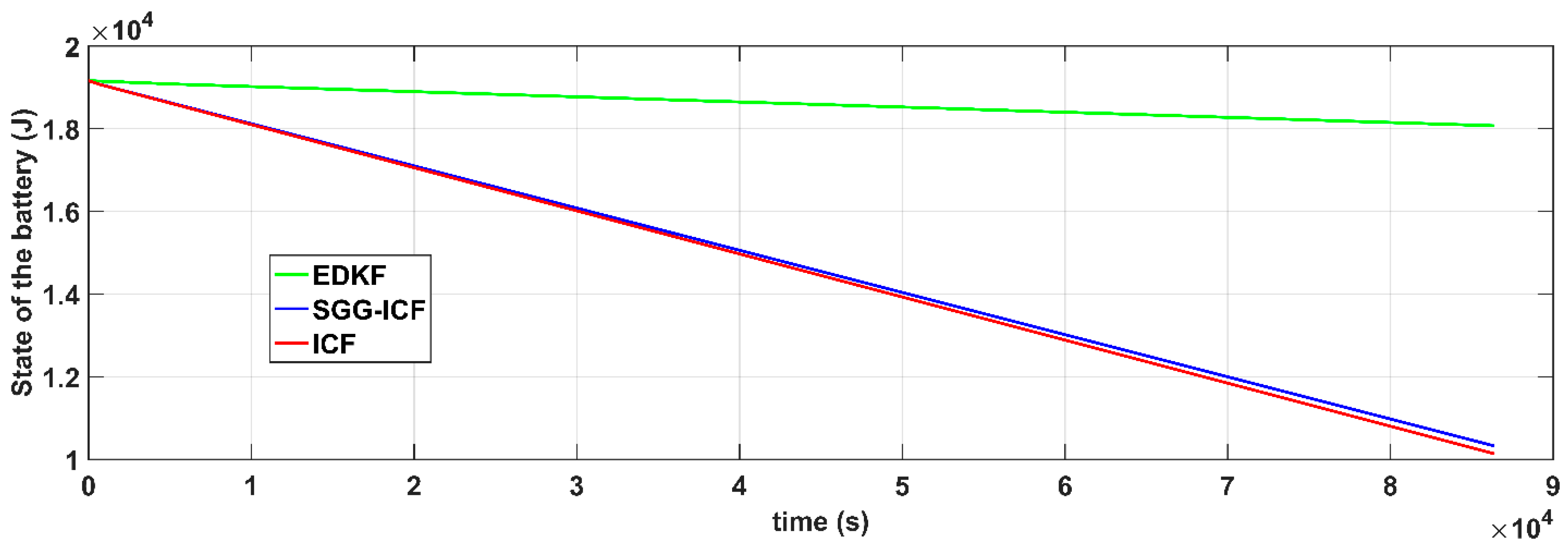
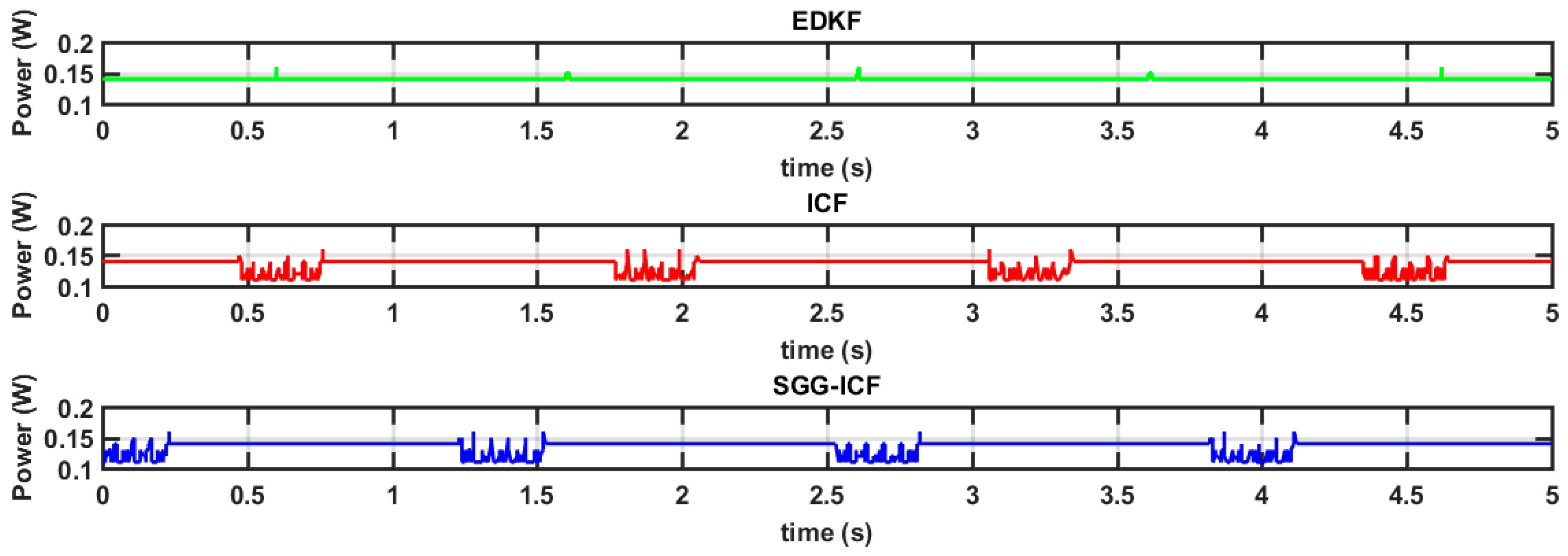
4.1. Power Consumption Evaluation of the Three DKF Algorithms: Scenario 1
4.1.1. Results from Simulations
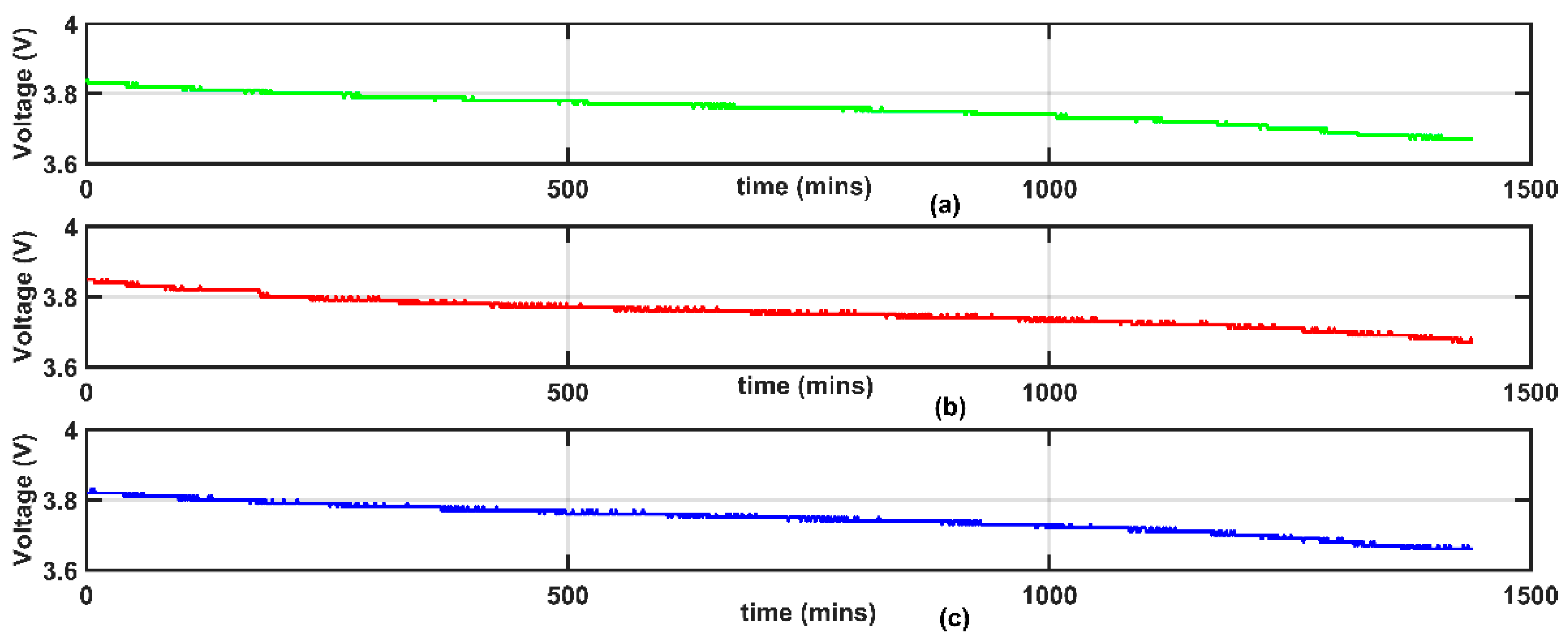
4.1.2. Results from Laboratory Experiments
4.2. Energy Consumption Reduction from Proposed Hybrid Technique: Scenario 2
4.3. Analysis of Energy Consumption Reduction Contribution of the Different Techniques
5. Conclusions and Perspectives
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Akyildiz, I.F.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. Wireless Sensor Networks: A Survey. Comput. Netw. 2002, 38, 393–422. [Google Scholar] [CrossRef]
- Ojo, M.O.; Giordano, S.; Procissi, G.; Seitanidis, I.N. A Review of Low-End, Middle-End, and High-End Iot Devices. IEEE Access 2018, 6, 70528–70554. [Google Scholar] [CrossRef]
- Ramson, S.R.J.; Moni, D.J. Applications of Wireless Sensor Networks–A Survey. In Proceedings of the International Conference on Innovations in Electrical, Electronics, Instrumentation and Media Technology (ICEEIMT), Coimbatore, India, 3–4 February 2017; pp. 325–329. [Google Scholar] [CrossRef]
- Kandris, D.; Nakas, C.; Vomvas, D.; Koulouras, G. Applications of Wireless Sensor Networks: An Up-to-Date Survey. Appl. Syst. Innov. 2020, 3, 14. [Google Scholar] [CrossRef]
- Ayadi, A.; Ghorbel, O.; BenSalah, M.S.; Abid, M. A Framework of Monitoring Water Pipeline Techniques Based on Sensors Technologies. J. King Saud Univ.-Comput. Inf. Sci. 2022, 34, 47–57. [Google Scholar] [CrossRef]
- Daniel, P.D. Non-Revenue Water Loss: Its Causes and Cures. 2016. Available online: https://www.waterworld.com/home/article/14070145/nonrevenue-water-loss-its-causes-and-cures (accessed on 27 June 2021).
- van Zyl, J.E.; Clayton, C.R.I. The Effect of Pressure on Leakage in Water Distribution Systems. Proc. Inst. Civ. Eng.-Water Manag. 2007, 160, 109–114. [Google Scholar] [CrossRef]
- Kartakis, S.; Yu, W.; Akhavan, R.; McCann, J.A. Adaptive Edge Analytics for Distributed Networked Control of Water Systems. In Proceedings of the First International Conference on Internet-of-Things Design and Implementation (IoTDI), Berlin, Germany, 4–8 April 2016. [Google Scholar] [CrossRef]
- López-Ardao, J.C.; Rodríguez-Rubio, R.F.; Suárez-González, A.; Rodríguez-Pérez, M.; Sousa-Vieira, M.E. Current Trends on Green Wireless Sensor Networks. Sensors 2021, 21, 4281. [Google Scholar] [CrossRef] [PubMed]
- Yetgin, H.; Cheung, K.T.; El-Hajjar, M.; Hanzo, L. A Survey of Network Lifetime Maximization Techniques in Wireless Sensor Networks. IEEE Commun. Surv. Tutor. 2017, 19, 828–854. [Google Scholar] [CrossRef]
- Kacimi, R.; Dhaou, R.; Beylot, A. Load Balancing Techniques for Lifetime Maximizing in Wireless Sensor Networks. Ad Hoc Netw. 2013, 11, 2172–2186. [Google Scholar] [CrossRef]
- Anastasi, G.; Conti, M.; Francesco, M.D.; Passarella, A. Energy Conservation in Wireless Sensor Networks: A Survey. Ad Hoc Netw. 2009, 7, 537–568. [Google Scholar] [CrossRef]
- Engmann, F.; Katsriku, F.A.; Abdulai, J.; Adu-Manu, K.S.; Banaseka, F.K. Prolonging the Lifetime of Wireless Sensor Networks: A Review of Current Techniques. Wirel. Comm. Mob. Comput. 2018, 2018, 8035065. [Google Scholar] [CrossRef]
- Arjunan, S.; Pothula, S. A Survey on Unequal Clustering Protocols in Wireless Sensor Networks. J. King Saud Univ.-Comput. Inf. Sci. 2019, 31, 304–317. [Google Scholar] [CrossRef]
- Elahi, H.; Munir, K.; Eugeni, M.; Atek, S.; Gaudenzi, P. Energy Harvesting towards Self-Powered IoT Devices. Energies 2020, 13, 5528. [Google Scholar] [CrossRef]
- Wu, Y.; Li, B.; Zhang, F. Predictive Power Management for Wind Powered Wireless Sensor Node. Future Internet 2018, 10, 85. [Google Scholar] [CrossRef]
- Abdulzahra, S.A.; Al-Qurabat, A.K.; Idrees, A.K. Energy Conservation Approach Oof Wireless Sensor Networks for IoT Applications. Karbala Int. J. Mod. Sci. 2021, 7, 340–351. [Google Scholar] [CrossRef]
- Odeyinka, O.J.; Ajibola, O.A.; Ndinechi, M.C.; Nosiri, O.C.; Onuekwusi, N.C. A Review on Conservation of Energy in Wireless Sensor Networks. Int. J. Smart Sens. Technol. Appl. IJSSTA 2020, 1, 1–16. [Google Scholar] [CrossRef]
- Abdul-Qawy, A.S.H.; Almurisi, N.M.S.; Tadisetty, S. Classification of Energy Saving Techniques for IoT-Based Heterogeneous Wireless Nodes. Procedia Comput. Sci. 2020, 171, 2590–2599. [Google Scholar] [CrossRef]
- Obeid, A.M.; Atitallah, N.; Loukil, K.; Abid, M.; Bensalah, M. A Survey on Efficient Power Consumption in Adaptive Wireless Sensor Networks. Wirel. Pers. Commun. 2018, 101, 101–117. [Google Scholar] [CrossRef]
- Singh, S.; Anand, V.; Bera, P.K. A Delay-Tolerant Low-Duty Cycle Scheme in Wireless Sensor Networks for IoT Applications. Int. J. Cogn. Comput. Eng. 2023, 4, 194–204. [Google Scholar] [CrossRef]
- Delicato, F.C.; Pires, P.F. Energy Awareness and Efficiency in Wireless Sensor Networks: From Physical Devices to the Communication Link. In Energy-Efficient Distributed Computing Systems; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Sahar, G.; Bakar, K.A.; Rahim, S.; Khani, N.A.K.K.; Bibi, T. Recent Advancement of Data-Driven Models in Wireless Sensor Networks: A Survey. Technologies 2021, 9, 76. [Google Scholar] [CrossRef]
- Suryavansh, S.; Benna, A.; Guest, C.; Chaterji, S. A Data-Driven Approach to Increasing the Lifetime of IoT Sensor Nodes. Sci. Rep. 2021, 11, 22459. [Google Scholar] [CrossRef] [PubMed]
- Nedham, W.B.; Al-Qurabat, A.K.M. A Review of Current Prediction Techniques for Extending the Lifetime of Wireless Sensor Networks. Int. J. Comput. Appl. Technol. 2023, 71, 352–362. [Google Scholar] [CrossRef]
- Tripathi, A.; Gupta, S.; Chourasiya, B. Survey on Data Aggregation Techniques for Wireless Sensor Networks. IJARCCE 2014, 3, 7366–7371. [Google Scholar]
- Bendjima, M.; Feham, M. Intelligent Communication in Wireless Sensor Networks. Future Internet 2018, 10, 91. [Google Scholar] [CrossRef]
- Sadeghioon, A.M.; Metje, N.; Chapman, D.; Anthony, C. SmartPipes: Smart Wireless Sensor Networks for Leak Detection in Water Pipelines. J. Sens. Actuator Netw. 2014, 3, 64–78. [Google Scholar] [CrossRef]
- Liu, Y.; Ma, X.; Li, Y.; Tie, Y.; Zhang, Y.; Gao, J. Water Pipeline Leakage Detection Based on Machine Learning and Wireless Sensor Networks. Sensors 2019, 19, 5086. [Google Scholar] [CrossRef]
- Mysorewala, M.; Sabih, M.; Cheded, L.; Nasir, M.T. A Novel Energy-Aware Approach for Locating Leaks in Water Pipeline Using a Wireless Sensor Network and Noisy Pressure Sensor Data. Int. J. Distrib. Sens. Netw. 2015, 11, 675454. [Google Scholar] [CrossRef]
- Mysorewala, M. Time and Energy Savings in Leak Detection in WSN-Based Water Pipelines: A Novel Parametric Optimization-Based Approach. Water Resour. Manag. 2019, 33, 2057–2071. [Google Scholar] [CrossRef]
- Saqib, N.; Mysorewala, M.F.; Cheded, L. A Novel Multi-Scale Adaptive Sampling-Based Approach for Energy Saving in Leak Detection for WSN-Based Water Pipelines. Meas. Sci. Technol. 2017, 28, 125102. [Google Scholar] [CrossRef][Green Version]
- Rashid, S.; Qaisar, H.; Saeed, H.; Felemban, E. A Method for Distributed Pipeline Burst and Leakage Detection in Wireless Sensor Networks Using Transform Analysis. Int. J. Distr. Sens. Netw. 2014, 10, 939657. [Google Scholar] [CrossRef]
- Yazdekhasti, S.; Piratla, K.R.; Sorber, J.; Atamturktur, S.; Khan, A.; Shukla, H. Sustainability Analysis of a Leakage-Monitoring Technique for Water Pipeline Networks. J. Pipeline Syst. Eng. Pract. 2020, 11, 04019052. [Google Scholar] [CrossRef]
- Karray, F.; Garcia-Ortiz, A.; Jamal, M.W.; Obeid, A.M.; Abid, M. EARNPIPE: A Testbed for Smart Water Pipeline Monitoring Using Wireless Sensor Network. Procedia Comput. Sci. 2016, 96, 285–294. [Google Scholar] [CrossRef]
- Nkemeni, V.; Mieyeville, F.; Tsafack, P. A Distributed Computing Solution Based on Distributed Kalman Filter for Leak Detection in WSN-Based Water Pipeline Monitoring. Sensors 2020, 20, 5204. [Google Scholar] [CrossRef] [PubMed]
- Bounceur, A. CupCarbon: A New Platform for Designing and Simulating Smart-City and IoT Wireless Sensor Networks (SCI-WSN). In Proceedings of the International Conference on Internet of Things and Cloud Computing, New York, NY, USA, 22–23 March 2016. [Google Scholar] [CrossRef]
- Lopez-Pavon, C.; Sendra, S.; Valenzuela-Valdes, J.F. Evaluation of CupCarbon Network Simulator for Wireless Sensor Networks. Netw. Protoc. Algorithms 2018, 10, 1–27. [Google Scholar] [CrossRef]
- Abusair, M.; Sharaf, M.; Muccini, H.; Inverardi, P. Adaptation for Situational-Aware Cyber-Physical Systems Driven by Energy Consumption and Human Safety. In Proceedings of the 11th European Conference on Software Architecture: Companion Proceedings, New York, NY, USA, 11–15 September 2017; ACM: Canterbury, UK, 2017; pp. 78–84. [Google Scholar] [CrossRef]
- Narayandas, V.; Maruthavanan, A.; Dugyala, R. Remote IoT Correspondence for Coordinating End-Devices over MANET via Energy-Efficient LPWAN. Int. J. Nanotechnol. 2023, 20, 346–360. [Google Scholar] [CrossRef]
- Saez-de-Camara, X.; Flores, J.L.; Arellano, C.; Urbieta, A.; Zurutuza, U. Gotham Testbed: A Reproducible IoT Testbed for Security Experiments and Dataset Generation. IEEE Trans. Dependable Secure Comput. 2023, 1–18. [Google Scholar] [CrossRef]
- Murnane, M.; Ghazel, A. A Closer Look at State Of Charge (SOC) and State Of Health (SOH) Estimation Techniques for Batteries. Analog. Devices 2017, 2, 426–436. [Google Scholar]
- EEMB Co., Ltd. Lithium-Ion Battery Datasheet. Available online: http://eemb.com (accessed on 20 May 2021).
- Lady Ada. Li-Ion & LiPoly Batteries. Adafruit Learning System. Available online: https://learn.adafruit.com/li-ion-and-lipoly-batteries/voltages (accessed on 20 May 2021).
- He, S.; Shin, H.; Xu, S.; Tsourdos, A. Distributed Estimation over a Low-Cost Sensor Network: A Review of State-of-the-Art. Inf. Fusion 2020, 54, 21–43. [Google Scholar] [CrossRef]
- Nkemeni, V.; Mieyeville, F.; Tsafack, P. Evaluation of the Leak Detection Performance of Distributed Kalman Filter Algorithms in WSN-Based Water Pipeline Monitoring of Plastic Pipes. Computation 2022, 10, 55. [Google Scholar] [CrossRef]
- Kamal, A.T.; Farrell, J.A.; Roy-Chowdhury, A.K. Information Weighted Consensus Filters and Their Application in Distributed Camera Networks. IEEE Trans. Autom. Control 2013, 58, 3112–3125. [Google Scholar] [CrossRef]
- Shin, H.; He, S.; Tsourdos, A. Sample Greedy Gossip Distributed Kalman Filter. Inf. Fusion 2020, 64, 259–269. [Google Scholar] [CrossRef]
- Battistelli, G.; Chisci, L.; Selvi, D. A Distributed Kalman Filter with Event-Triggered Communication and Guaranteed Stability. Automatica 2018, 93, 75–82. [Google Scholar] [CrossRef]
- Virk, M.A.; Mysorewala, M.F.; Cheded, L.; Ali, I.M. Leak Detection Using Flow-Induced Vibrations in Pressurized Wall-Mounted Water Pipelines. IEEE Access 2020, 8, 188673–188687. [Google Scholar] [CrossRef]
- Warden, P.; Situnayake, D. TinyML: Machine Learning with TensorFlow Lite on Arduino and Ultra-Low-Power Microcontrollers; O’Reilly Media: Sebastopol, CA, USA, 2020. [Google Scholar]
- Novac, P.-E.; Boukli Hacene, G.; Pegatoquet, A.; Miramond, B.; Gripon, V. Quantization and Deployment of Deep Neural Networks on Microcontrollers. Sensors 2021, 21, 2984. [Google Scholar] [CrossRef]
- Tomer, V.; Sharma, S. Detecting IoT Attacks Using an Ensemble Machine Learning Model. Future Internet 2022, 14, 102. [Google Scholar] [CrossRef]
- Fan, X.; Zhang, X.; Yu, X.B. Machine Learning Model and Strategy for Fast and Accurate Detection of Leaks in Water Supply Network. J. Infrastruct. Preserv. Resil. 2021, 2, 10. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Accelerometer | Resolution | Bandwidth (Hz) | Sensitivity (LSB/g) | Sensing Range | Noise Floor Level (μg/√Hz) | Current Consumption (µA) |
|---|---|---|---|---|---|---|
| ADXL344 | 13 | 0–1600 | 4096 | ±2 g, ±4 g, ±8 g, ±16 g | 530 | 23 |
| LSM9DS1 | 16 | 0–400 | 32,768 | ±2 g, ±4 g, ±8 g, ±16 g | N.A. | 600 |
| Technique | Rationale and Components Affected |
|---|---|
| Distributed computing | Reduces energy consumption by reducing the number of transmissions to the base station |
| Duty cycling | Reduces energy consumption by switching sensor node components (MCU, transceiver, and sensors) to low power modes. |
| Hierarchical Sensing | Reduces energy consumption by performing a tradeoff (compromise) between accuracy and energy consumption. This involves switching between high accuracy high power sensor and low accuracy low power sensor |
| Parameter | Value | Concerned Algorithms |
|---|---|---|
| State transition matrix (A) | 1 | All |
| Measurement matrix (H) | 1 | All |
| Process noise covariance (Q) | 0.001 | All |
| Measurement noise covariance (R) | 0.0081 | All |
| Network size (N) | 2 | ICF and SGG-ICF |
| Number of consensus or gossip iterations (L) | 5 | ICF and SGG-ICF |
| Consensus speed factor (ϵ) | 0.65 | ICF |
| Sensor activation probability (p) | 0.5 | SGG-ICF |
| Information transmission rate (α, β, and δ) | 0.001, 40, 40, respectively | EDKF |
| Battery Energy (J) | Battery Energy Usage (%) | |||
|---|---|---|---|---|
| Time (min) | 0 | 1440 | ||
| DKF Algorithm | EDKF | 19,160 | 18,069 | 5.7 |
| ICF | 19,160 | 10,133 | 47.1 | |
| SGG-ICF | 19,160 | 10,321 | 46.1 | |
| Battery Voltage (V) | SOC (%) | Battery Energy Usage (%) | ||||
|---|---|---|---|---|---|---|
| Time (min) | 0 | 1440 | 0 | 1440 | ||
| DKF Algorithm | EDKF | 3.83 | 3.67 | 67.32 | 26.61 | 40.71 |
| ICF | 3.85 | 3.67 | 71.14 | 26.61 | 44.53 | |
| SGG-ICF | 3.82 | 3.66 | 65.26 | 23.92 | 41.34 | |
| DKF Algorithm | Node’s Lifetime from Power Measurements (Method 1) | Node’s Lifetime from Battery Energy Consumption Measurements (Method 2) |
|---|---|---|
| EDKF | 52 h | 59 h |
| ICF | 54 h | 53.9 h |
| SGG-ICF | 54 h | 58.1 h |
| Technique | Energy Consumption (mAh) |
|---|---|
| Distributed Computing only | 37.89 |
| Distributed Computing + Hierarchical Sensing | 37.39 |
| Distributed Computing + Duty Cycling | 0.75 |
| Distributed Computing + Hierarchical Sensing + Duty Cycling | 0.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nkemeni, V.; Mieyeville, F.; Tsafack, P. Energy Consumption Reduction in Wireless Sensor Network-Based Water Pipeline Monitoring Systems via Energy Conservation Techniques. Future Internet 2023, 15, 402. https://doi.org/10.3390/fi15120402
Nkemeni V, Mieyeville F, Tsafack P. Energy Consumption Reduction in Wireless Sensor Network-Based Water Pipeline Monitoring Systems via Energy Conservation Techniques. Future Internet. 2023; 15(12):402. https://doi.org/10.3390/fi15120402
Chicago/Turabian StyleNkemeni, Valery, Fabien Mieyeville, and Pierre Tsafack. 2023. "Energy Consumption Reduction in Wireless Sensor Network-Based Water Pipeline Monitoring Systems via Energy Conservation Techniques" Future Internet 15, no. 12: 402. https://doi.org/10.3390/fi15120402
APA StyleNkemeni, V., Mieyeville, F., & Tsafack, P. (2023). Energy Consumption Reduction in Wireless Sensor Network-Based Water Pipeline Monitoring Systems via Energy Conservation Techniques. Future Internet, 15(12), 402. https://doi.org/10.3390/fi15120402