
A Comprehensive Survey Exploring the Multifaceted Interplay between Mobile Edge Computing and Vehicular Networks




Abstract
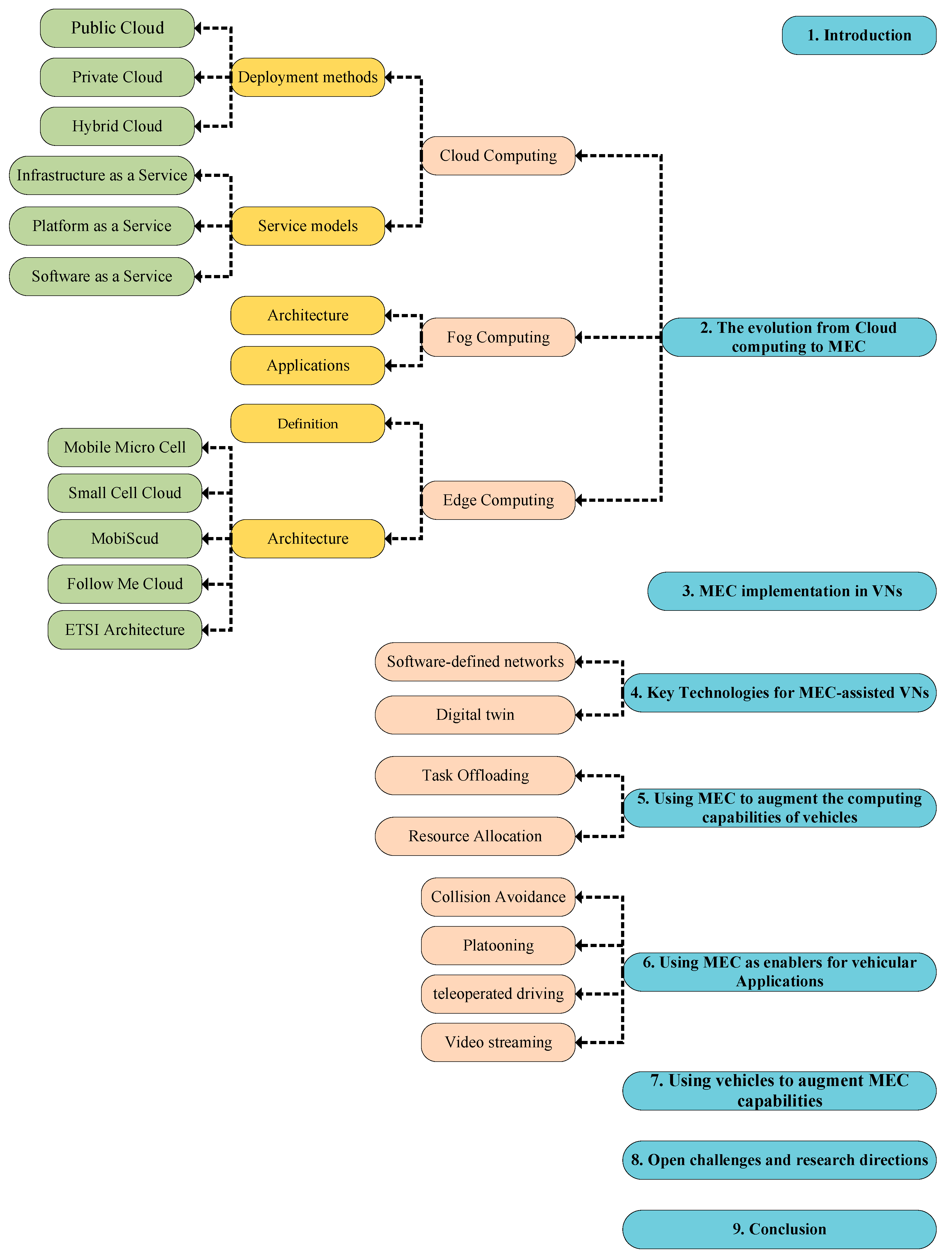
:1. Introduction
1.1. Motivation
1.2. Contribution
2. The Evolution from Cloud Computing to MEC
2.1. Cloud Computing
2.1.1. Deployment Models
2.1.2. Service Models
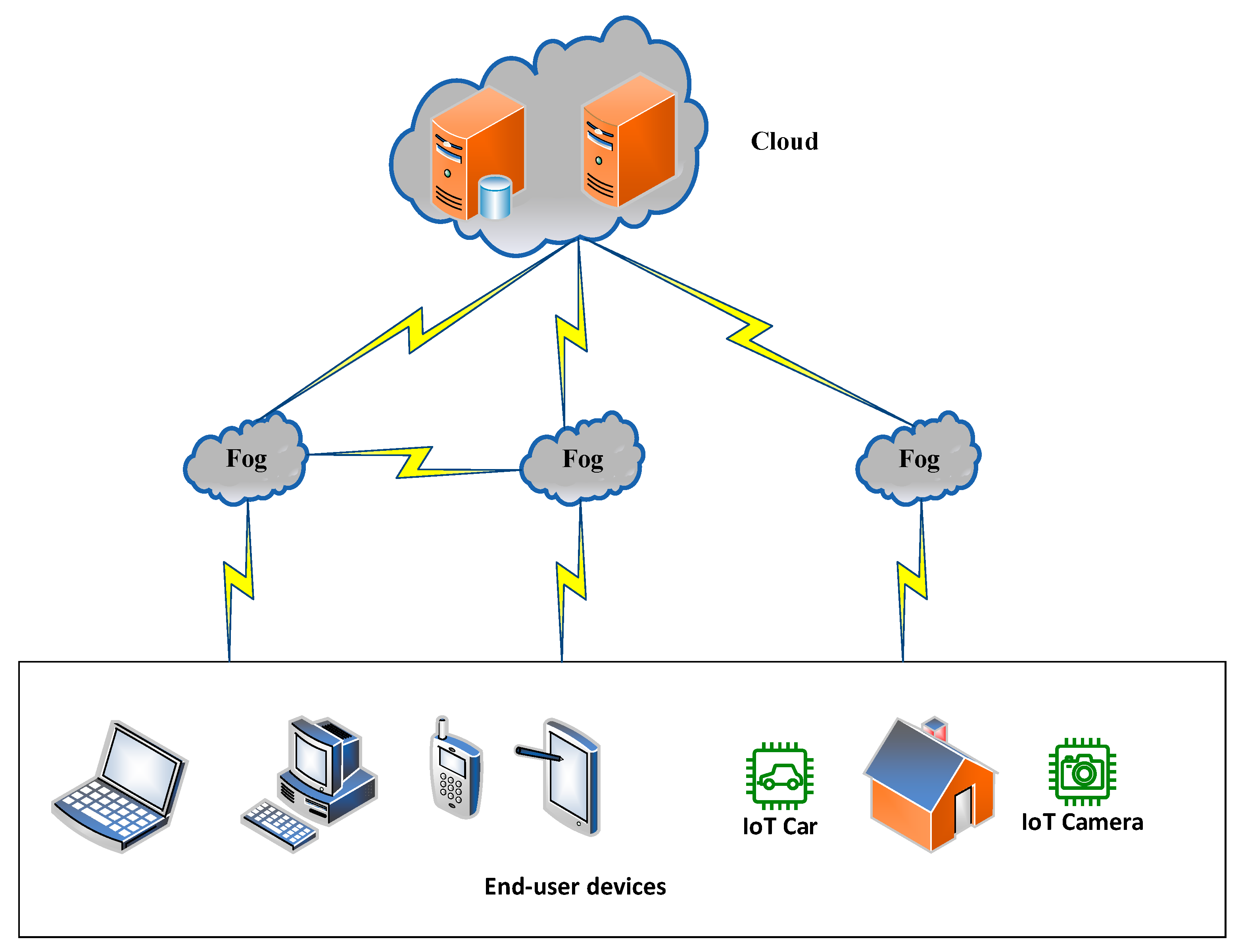
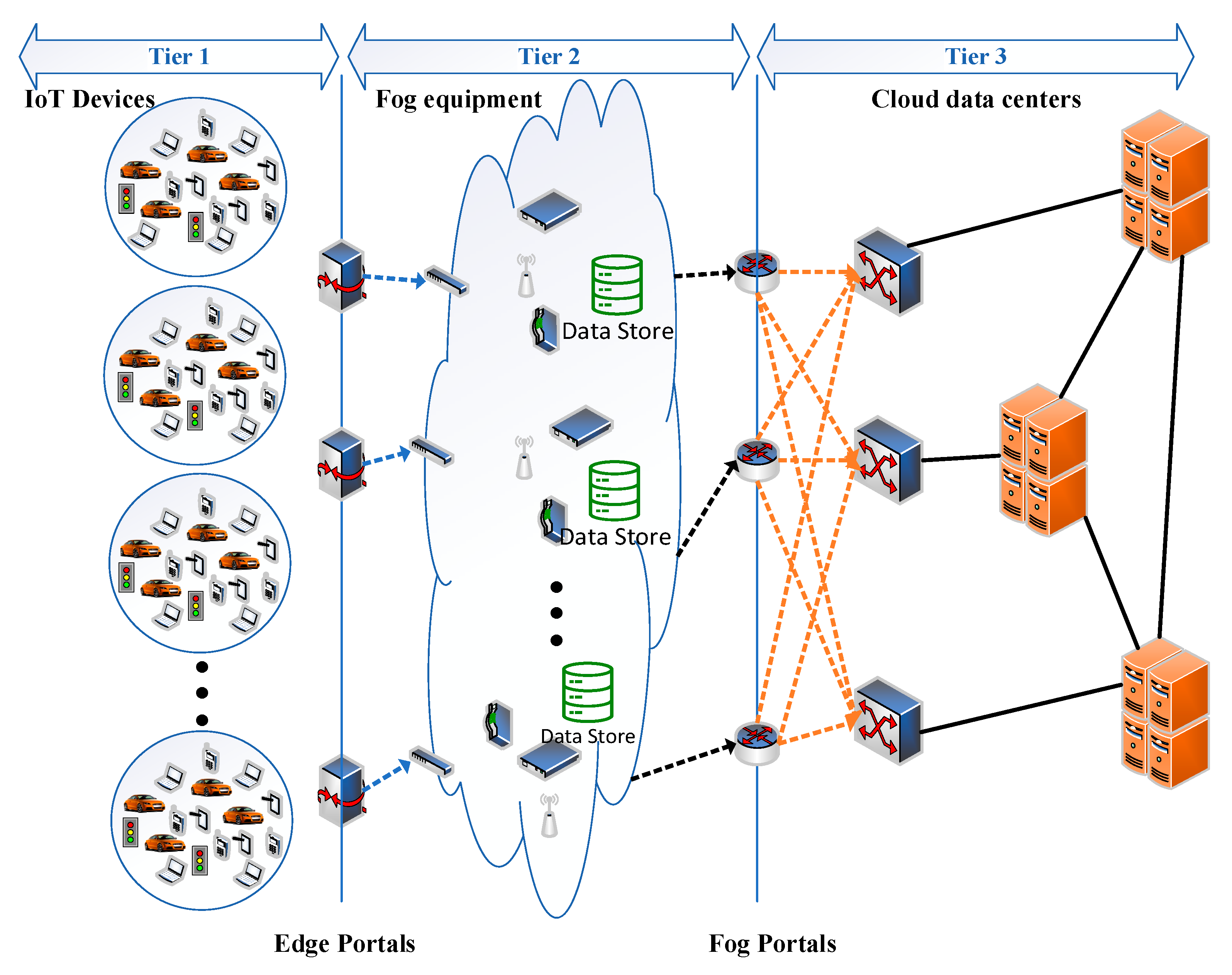
2.2. Fog Computing
2.2.1. Architecture
- Tier 1—IoT Devices: This level mainly comprises user equipment such as smartphones, intelligent cars, etc. We call these devices Terminal Nodes (TNs). TNs might have features such as a Global Positioning System (GPS).
- Tier 2—Fog (middle layer): There is a special plane in this architecture called the fog computing plane. In this plane, there are devices such as routers, switches, and Access Points (APs). These devices not only exchange data but they can also share their storage space and computing power.
- Tier 3—Cloud: This faraway layer is equipped with extensive storage capacity and powerful computing resources that can handle a lot of information and perform complex tasks.
2.2.2. Applications

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Features | Cloud Computing | Fog Computing |
|---|---|---|
| Server hardware | Large-scale data centers (including a significant number of highly capable servers) | Small-scale data centers (moderate or low resources) |
| Server location | Far from end users, installed in large premises, accessed via wired Internet [41] | Located near the end users, communication via Wi-Fi, LTE, 5G, etc. |
| Deployment cost | High, requiring complicated configuration and planning | Low, requires ad hoc deployment with or without planning |
| Computing method | Centralized | Distributed or centralized |
| Operated by | Large companies | Small or large companies |
| System management | Centralized control | Hierarchical control |
| Applications | Cyber-domain, time-tolerant, and high-intensity computation applications | Supports both cyber-domain and cyber-physical applications, specifically latency-sensitive applications |
| Backhaul usage | Frequent use | Lower use, avoiding traffic congestion |
| Latency control | Low | High |
| Reliability | High | Low |
| Maintenance | By technical experts | Requiring little or no human intervention |
2.3. Edge Computing
2.3.1. Definition of Mobile Edge Computing
2.3.2. Mobile Edge Computing Architecture
- Mobile Micro Cell (MMC)
- Small Cell Cloud (SCC)
- MobiScud
- Follow Me Cloud (FMC)
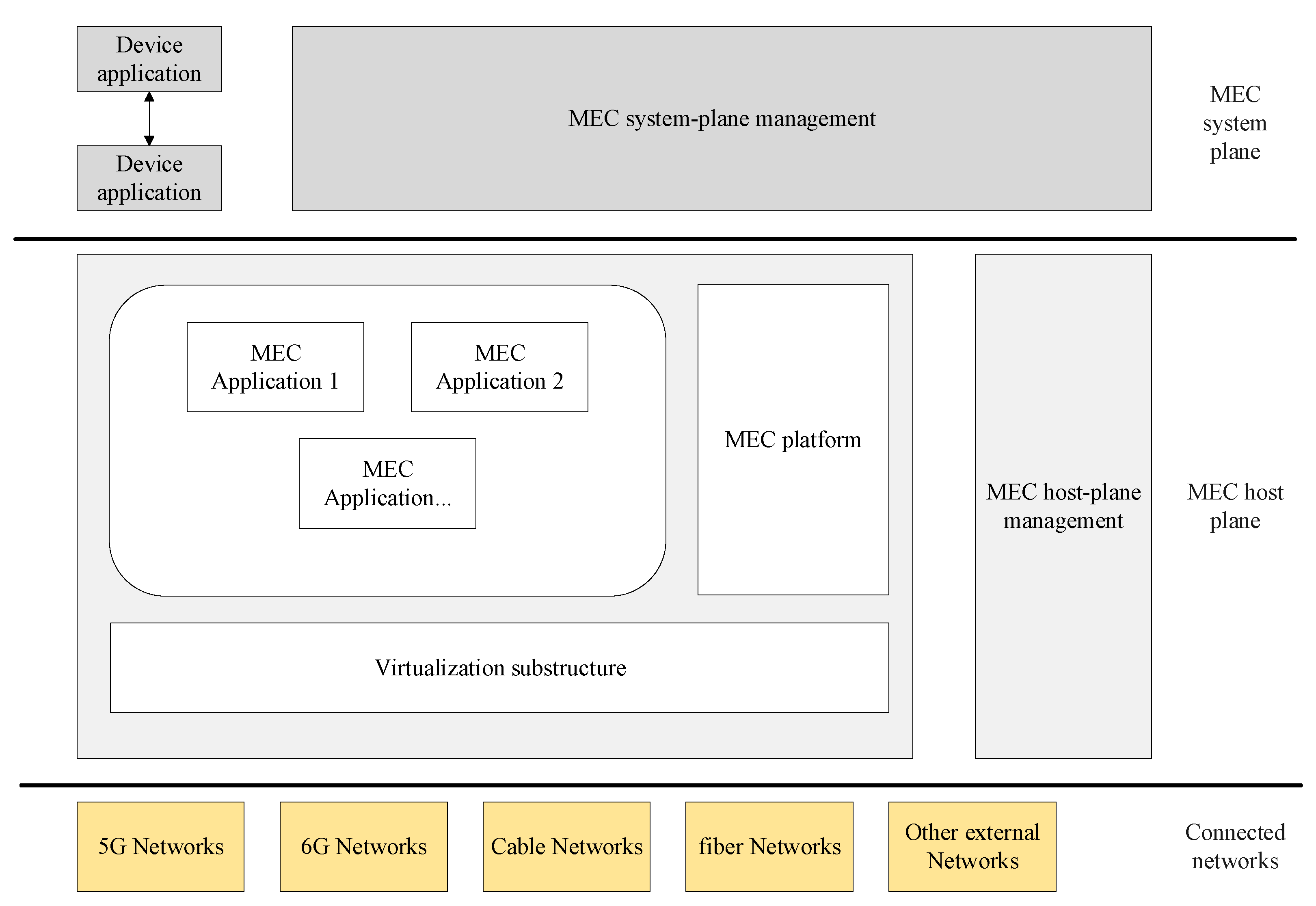
- ETSI Multiaccess Edge Computing
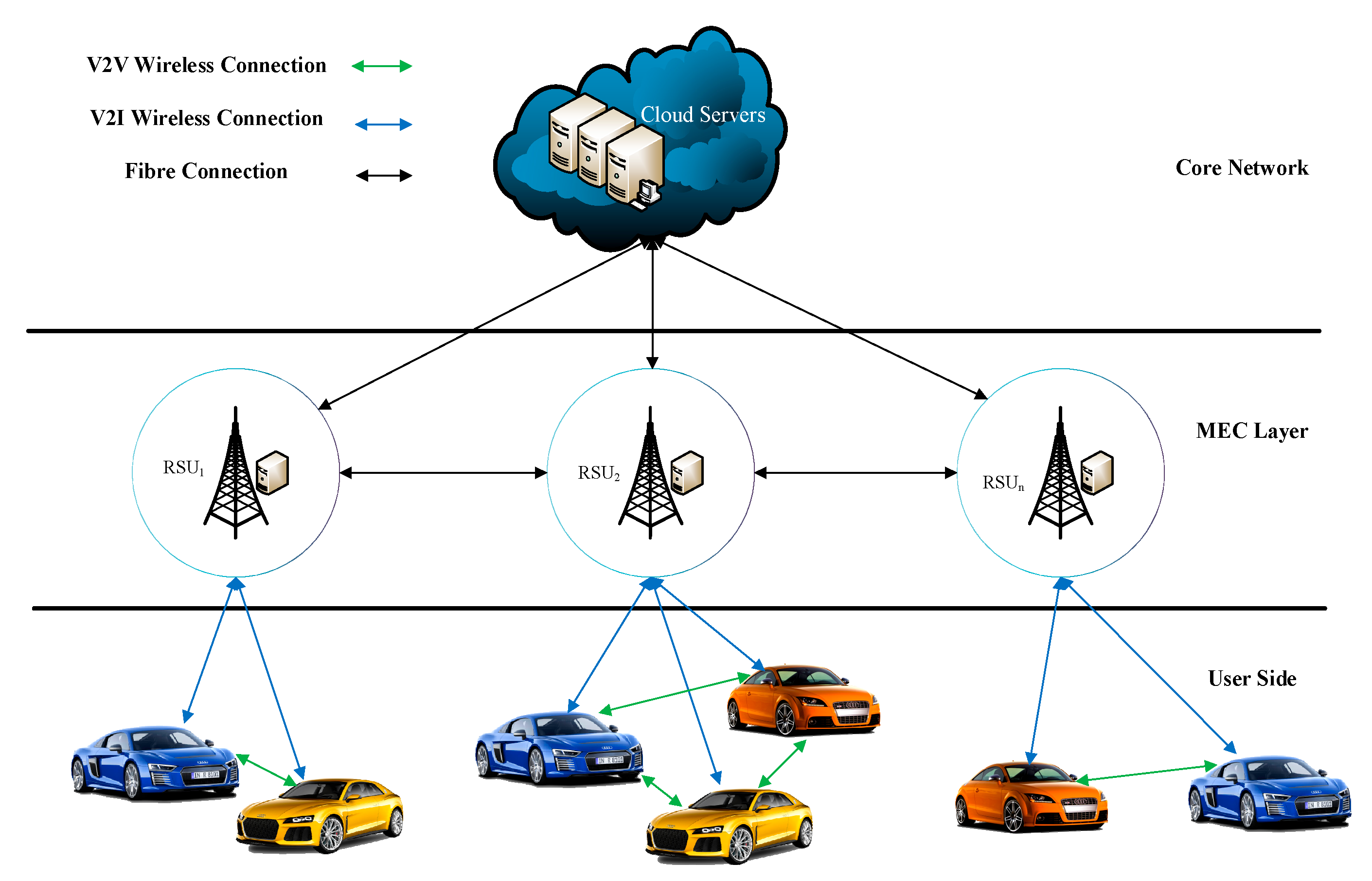
3. MEC Implementation in Vehicular Networks
3.1. User-Side Layer
3.2. MEC Layer
3.3. Core Network Layer
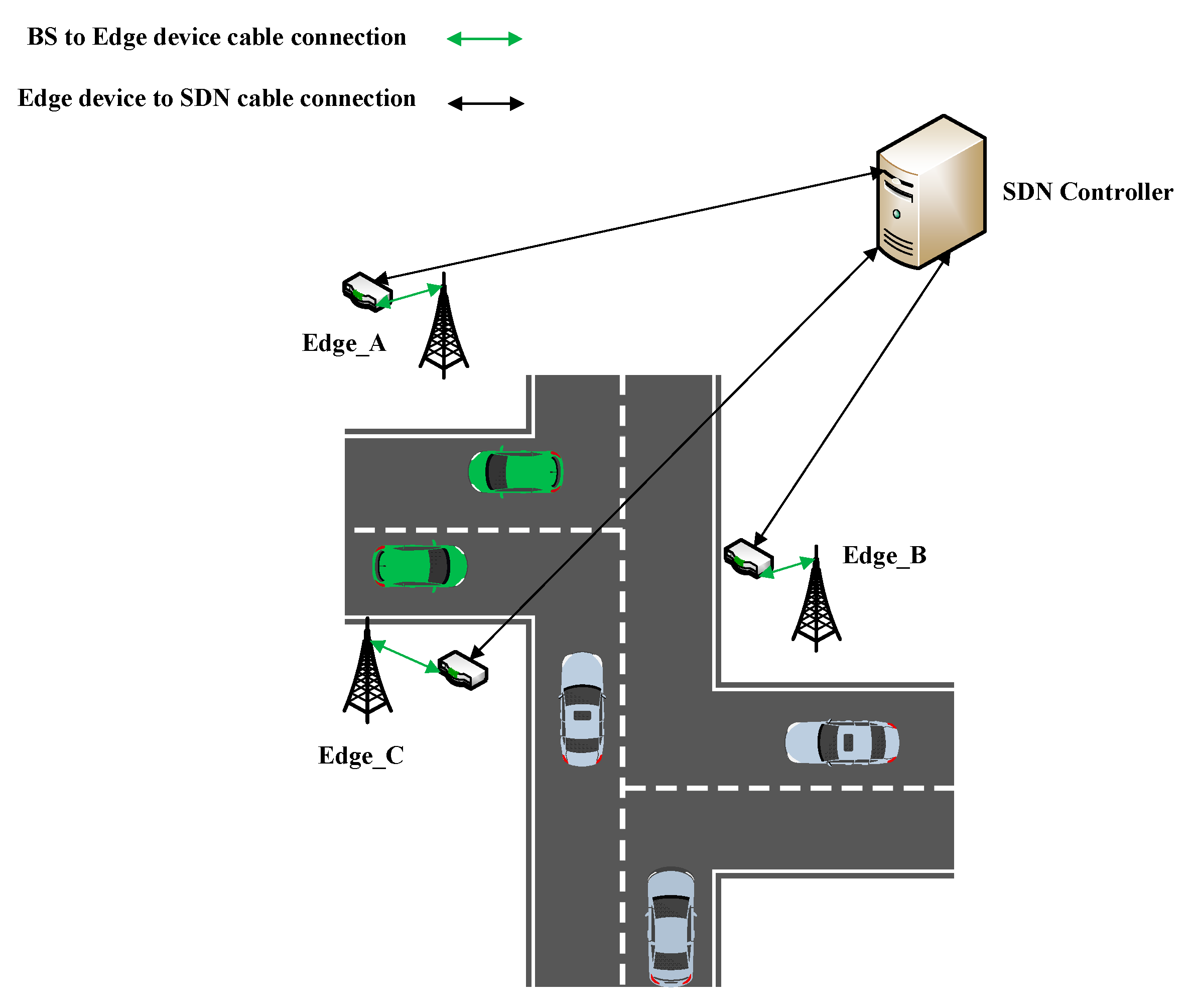
4. Key Technologies for MEC-Assisted Vehicular Networks
4.1. Software-Defined Networking
4.2. Digital Twin
5. Using MEC to Augment the Computing Capabilities of Vehicles
5.1. Task Offloading
5.2. Resource Allocation
6. Using MEC as Enabler for Vehicular Applications
6.1. Collision Avoidance
6.2. Platooning
6.3. Tele-Operated Driving
6.4. Video Streaming
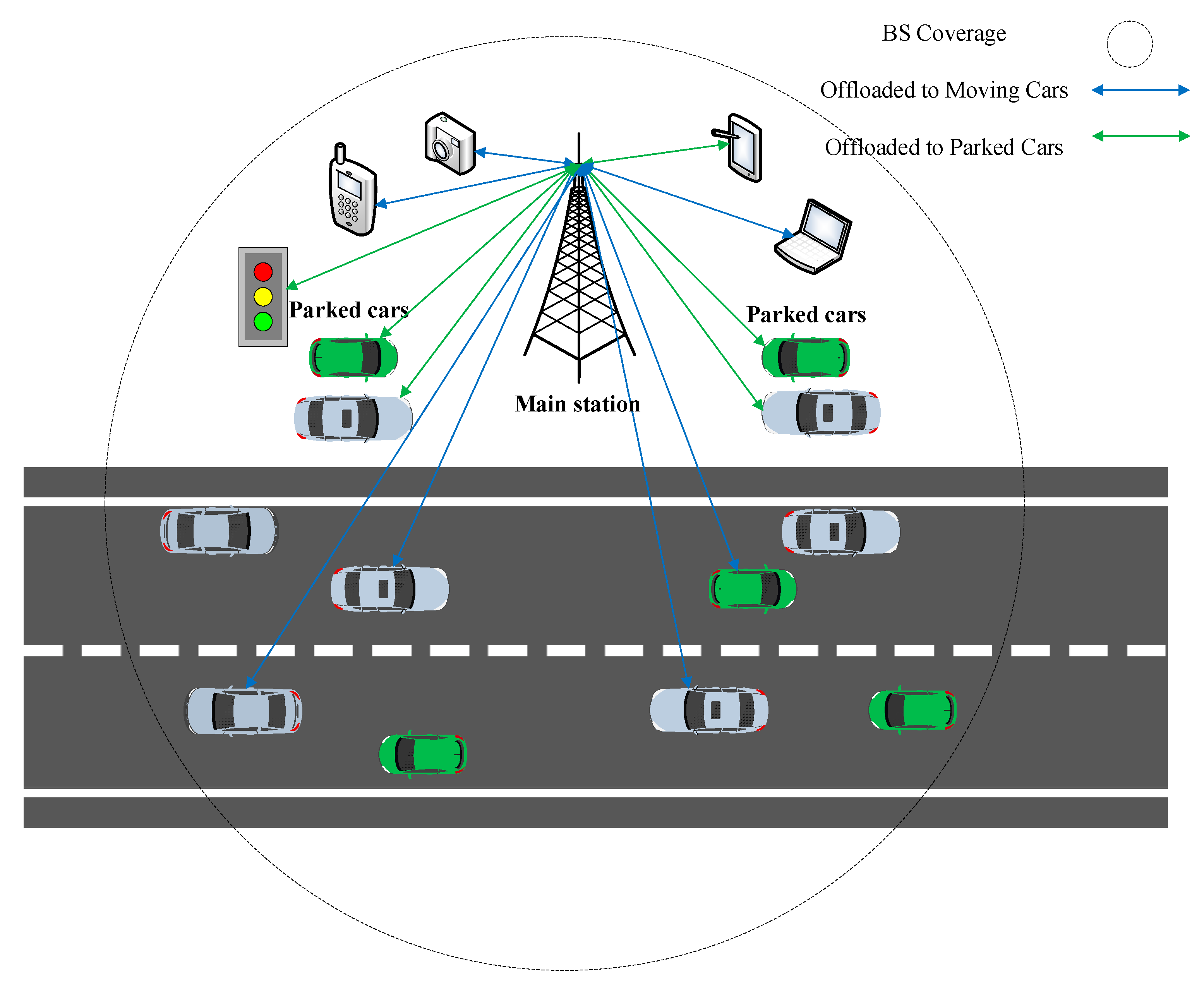
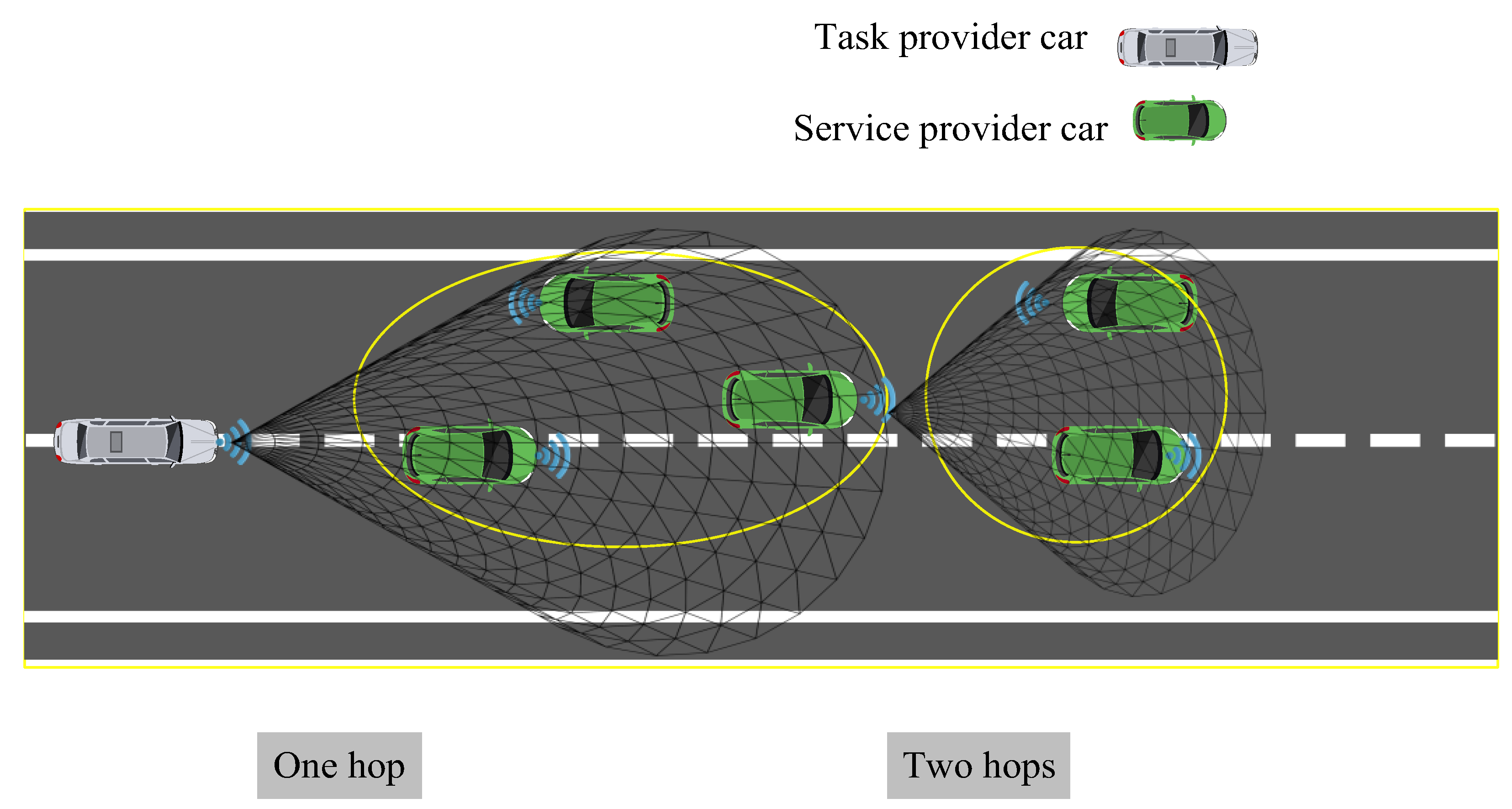
7. Using Vehicles to Augment MEC Capabilities
8. Open Challenges and Research Directions
8.1. Stability and Interconnectivity
8.2. Task Segmentation and Migration
8.3. Using Artificial Intelligence
9. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Cisco Staff. Cisco Public Cisco Visual Networking Index: Global Mobile Data Traffic—The Cisco® Visual Networking Index (VNI) Global Mobile Data. In Cisco White Paper; Cisco: San Jose, CA, USA, 2019. [Google Scholar]
- Evans, D. The Internet of Things How the Next Evolution of the Internet Is Changing Everything. In Cisco White Paper; Cisco: San Jose, CA, USA, 2011. [Google Scholar]
- Arasteh, H.; Hosseinnezhad, V.; Loia, V.; Tommasetti, A.; Troisi, O.; Shafie-Khah, M.; Siano, P. Iot-based smart cities: A survey. In Proceedings of the EEEIC 2016—International Conference on Environment and Electrical Engineering, Florence, Italy, 7–10 June 2016; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2016. [Google Scholar] [CrossRef]
- Sparks, P. The Route to a Trillion Devices—The Outlook for IoT Investment to 2035. In ARM Whitepaper; ARM: Waltham, MA, USA, 2017. [Google Scholar]
- Ahmed, E.; Gharavi, H. Cooperative Vehicular Networking: A Survey. IEEE Trans. Intell. Transp. Syst. 2018, 19, 996–1014. [Google Scholar] [CrossRef] [PubMed]
- Ma, X.; Zhao, J.; Gong, Y.; Wang, Y. Key technologies of MEC towards 5G-enabled vehicular networks. In Lecture Notes of the Institute for Computer Sciences, Social-Informatics and Telecommunications Engineering, LNICST; Springer: Berlin/Heidelberg, Germany, 2018; pp. 153–159. [Google Scholar] [CrossRef]
- Abbas, N.; Zhang, Y.; Taherkordi, A.; Skeie, T. Mobile Edge Computing: A Survey. IEEE Internet Things J. 2018, 5, 450–465. [Google Scholar] [CrossRef]
- Rasheed, A.; Chong, P.H.J.; Ho, I.W.H.; Li, X.J.; Liu, W. An overview of mobile edge computing: Architecture, technology and direction. In KSII Transactions on Internet and Information Systems; Korean Society for Internet Information: Seoul, Republic of Korea, 2019; pp. 4849–4864. Volume 13. [Google Scholar] [CrossRef]
- Ranaweera, P.; Jurcut, A.; Liyanage, M. MEC-enabled 5G Use Cases: A Survey on Security Vulnerabilities and Countermeasures. ACM Comput. Surv. 2022, 54, 186. [Google Scholar] [CrossRef]
- Singh, R.; Sukapuram, R.; Chakraborty, S. A survey of mobility-aware Multi-access Edge Computing: Challenges, use cases and future directions. Ad Hoc Networks 2023, 140, 103044. [Google Scholar] [CrossRef]
- Hou, L.; Gregory, M.A.; Li, S. A Survey of Multi-Access Edge Computing and Vehicular Networking. IEEE Access 2022, 10, 123436–123451. [Google Scholar] [CrossRef]
- Liang, B.; Gregory, M.A.; Li, S. Multi-access Edge Computing fundamentals, services, enablers and challenges: A complete survey. J. Netw. Comput. Appl. 2022, 199, 103308. [Google Scholar] [CrossRef]
- Mehrabi, M.; Salah, H.; Fitzek, F.H.P. A Survey on Mobility Management for MEC-Enabled Systems. In Proceedings of the 2019 IEEE 2nd 5G World Forum (5GWF), Dresden, Germany, 30 September–2 October 2019. [Google Scholar]
- Bréhon, L.; Kacimi, R.; Beylot, A.L. Mobile edge computing for V2X architectures and applications: A survey. Comput. Netw. 2022, 206, 108797. [Google Scholar] [CrossRef]
- Zhou, S.; Jadoon, W.; Khan, I.A. Computing Offloading Strategy in Mobile Edge Computing Environment: A Comparison between Adopted Frameworks, Challenges, and Future Directions. Electronics 2023, 12, 2452. [Google Scholar] [CrossRef]
- Patsias, V.; Amanatidis, P.; Karampatzakis, D.; Lagkas, T.; Michalakopoulou, K.; Nikitas, A. Task Allocation Methods and Optimization Techniques in Edge Computing: A Systematic Review of the Literature. Future Internet 2023, 15, 254. [Google Scholar] [CrossRef]
- Zhu, M.; Gao, S.; Tu, G.; Chen, D. Multi-Access Edge Computing (MEC) Based on MIMO: A Survey. Sensors 2023, 23, 3883. [Google Scholar] [CrossRef]
- Mell, P.M.; Grance, T. The NIST Definition of Cloud Computing; NIST: Gaithersburg, MD, USA, 2011. [CrossRef]
- Armbrust, M.; Fox, A.; Griffith, R.; Joseph, A.D.; Katz, R.; Konwinski, A.; Lee, G.; Patterson, D.; Rabkin, A.; Stoica, I.; et al. A view of cloud computing. Commun. ACM 2010, 53, 50–58. [Google Scholar] [CrossRef]
- Al Morsy, M.; Grundy, J.; Müller, I. An Analysis of The Cloud Computing Security Problem. arXiv 2016, arXiv:1609.01107. [Google Scholar]
- Namasudra, S.; Roy, P.; Balusamy, B. Cloud computing: Fundamentals and research issues. In Proceedings of the 2017 2nd International Conference on Recent Trends and Challenges in Computational Models, ICRTCCM 2017, Tindivanam, India, 3–4 February 2017; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2017; pp. 7–12. [Google Scholar] [CrossRef]
- Singh, B. A Systematic Review on Cloud Computing. 2013. Available online: www.ijert.org (accessed on 25 October 2023).
- Jaatun, M.G.; Zhao, G.; Rong, C. Cloud Computing: An Overview. In Cloud Computing. CloudCom 2009; Lecture Notes in Computer Science, Vol 5931; Jaatun, M.G., Zhao, G., Rong, C., Eds.; Springer: Berlin, Heidelberg. [CrossRef]
- Voorsluys, W.; Broberg, J.; Buyya, R. Introduction to Cloud Computing. In Cloud Computing: Principles and Paradigms; John Wiley and Sons: Hoboken, NJ, USA, 2011; pp. 1–41. [Google Scholar] [CrossRef]
- Buyya, R.; Broberg, J.; Goscinski, A. Cloud Computing Principles and Paradigms. Available online: http://dhoto.lecturer.pens.ac.id/lecture_notes/internet_of_things/CLOUD%20COMPUTING%20Principles%20and%20Paradigms.pdf (accessed on 25 October 2023).
- Mukherjee, M.; Shu, L.; Wang, D. Survey of fog computing: Fundamental, network applications, and research challenges. IEEE Commun. Surv. Tutor. 2018, 20, 1826–1857. [Google Scholar] [CrossRef]
- Bonomi, F.; Milito, R.; Zhu, J.; Addepall, S. Fog Computing and Its Role in the Internet of Things. In Proceedings of the 1st ACM Mobile Cloud Computing Workshop, Helsinki, Finland, 17 August 2012. [Google Scholar]
- Iorga, M.; Feldman, L.; Barton, R.; Martin, M.J.; Goren, N.; Mahmoudi, C. Fog Computing Conceptual Model; NIST: Gaithersburg, MD, USA, 2018. [CrossRef]
- Vaquero, L.M.; Rodero, L.; Gradiant, M. Finding your Way in the Fog: Towards a Comprehensive Definition of Fog Computing. Available online: https://dl.acm.org/doi/abs/10.1145/2677046.2677052 (accessed on 25 October 2023).
- ElSawy, H.; Hossain, E.; Alouini, M.S. Analytical modeling of mode selection and power control for underlay D2D communication in cellular networks. IEEE Trans. Commun. 2014, 62, 4147–4161. [Google Scholar] [CrossRef]
- Gamage, A.P.K.T.; Liang, H.; Zhang, R.; Shen, X. Device-to-device communication underlaying converged heterogeneous networks. IEEE Wirel. Commun. 2014, 21, 98–107. [Google Scholar] [CrossRef]
- Wildemeersch, M.; Quek, T.Q.S.; Kountouris, M.; Rabbachin, A.; Slump, C.H. Successive interference cancellation in heterogeneous networks. IEEE Trans. Commun. 2014, 62, 4440–4453. [Google Scholar] [CrossRef]
- Sarkar, S.; Chatterjee, S.; Misra, S. Assessment of the Suitability of Fog Computing in the Context of Internet of Things. IEEE Trans. Cloud Comput. 2018, 6, 46–59. [Google Scholar] [CrossRef]
- Sánchez-Corcuera, R.; Nuñez-Marcos, A.; Sesma-Solance, J.; Bilbao-Jayo, A.; Mulero, R.; Zulaika, U.; Azkune, G.; Almeida, A. Smart cities survey: Technologies, application domains and challenges for the cities of the future. Int. J. Distrib. Sens. Netw. 2019, 15, 1550147719853984. [Google Scholar] [CrossRef]
- Perera, C.; Qin, Y.; Estrella, J.C.; Reiff-Marganiec, S.; Vasilakos, A.V. Fog computing for sustainable smart cities: A survey. ACM Comput. Surv. 2017, 50, 32. [Google Scholar] [CrossRef]
- Bruneo, D.; Distefano, S.; Longo, F.; Merlino, G.; Puliafito, A.; D’Amico, V.; Sapienza, M.; Torrisi, G. Stack4Things as a fog computing platform for Smart City applications. In Proceedings of the IEEE INFOCOM, San Francisco, CA, USA, 10–14 April 2016; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2016; pp. 848–853. [Google Scholar] [CrossRef]
- Hou, X.; Li, Y.; Chen, M.; Wu, D.; Jin, D.; Chen, S. Vehicular Fog Computing: A Viewpoint of Vehicles as the Infrastructures. IEEE Trans. Veh. Technol. 2016, 65, 3860–3873. [Google Scholar] [CrossRef]
- Giang, N.K.; Leung, V.C.M.; Lea, R. On developing smart transportation applications in fog computing paradigm. In Proceedings of the DIVANet 2016—Proceedings of the 6th ACM Symposium on Development and Analysis of Intelligent Vehicular Networks and Applications, Co-Located with MSWiM 2016, Valletta, Malta, 13–17 November 2016; Association for Computing Machinery, Inc.: New York, NY, USA, 2016; pp. 91–98. [Google Scholar] [CrossRef]
- Hu, P.; Ning, H.; Qiu, T.; Zhang, Y.; Luo, X. Fog computing based face identification and resolution scheme in internet of things. IEEE Trans. Industr. Inform. 2017, 13, 1910–1920. [Google Scholar] [CrossRef]
- Zao, J.K.; Gan, T.T.; You, C.K.; Mendez, S.J.R.; Chung, C.E.; Wang, Y.T.; Mullen, T.; Jung, T.P. Augmented brain computer interaction based on fog computing and linked data. In Proceedings of the 2014 International Conference on Intelligent Environments, IE 2014, Shanghai, China, 30 June–4 July 2014; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2014; pp. 374–377. [Google Scholar] [CrossRef]
- Mukherjee, M.; Shu, L.; Wang, D.; Li, K.; Chen, Y. A fog computing-based framework to reduce traffic overhead in large-scale industrial applications. In Proceedings of the 2017 IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Atlanta, GA, USA, 1–4 May 2017; pp. 1008–1009. [Google Scholar] [CrossRef]
- Yi, S.; Hao, Z.; Qin, Z.; Li, Q. Fog computing: Platform and applications. In Proceedings of the 3rd Workshop on Hot Topics in Web Systems and Technologies, HotWeb 2015, Washington, DC, USA, 12–13 November 2015; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2016; pp. 73–78. [Google Scholar] [CrossRef]
- Yan, G.; Wen, D.; Olariu, S.; Weigle, M.C. Security challenges in vehicular cloud computing. IEEE Trans. Intell. Transp. Syst. 2013, 14, 284–294. [Google Scholar] [CrossRef]
- Bari, M.F.; Boutaba, R.; Esteves, R.; Granville, L.Z.; Podlesny, M.; Rabbani, G.; Zhang, Q.; Zhani, M.F. Data center network virtualization: A survey. IEEE Commun. Surv. Tutor. 2013, 15, 909–928. [Google Scholar] [CrossRef]
- Chiang, M.; Zhang, T. Fog and IoT: An Overview of Research Opportunities. IEEE Internet Things J. 2016, 3, 854–864. [Google Scholar] [CrossRef]
- Patel, M.; Hu, Y.; Hédé, P.; Joubert, J.; Thornton, C.; Naughton, B.; Julian, I.; Ramos, R.; Chan, C.; Young, V.; et al. Mobile-Edge Computing—Introductory Technical White Paper; Huawei: Shenzhen, China; IBM: New York, NY, USA; Intel: Santa Clara, CA, USA, 2014. [Google Scholar]
- Jararweh, Y.; Doulat, A.; Darabseh, A.; Alsmirat, M.; Al-Ayyoub, M.; Benkhelifa, E. SDMEC: Software defined system for mobile edge computing. In Proceedings of the 2016 IEEE International Conference on Cloud Engineering Workshops, IC2EW 2016, Berlin, Germany, 4–8 April 2016; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2016; pp. 88–93. [Google Scholar] [CrossRef]
- Hu, Y.C.; Patel, M.; Sabella, D.; Young, V. ETSI White Paper #11 Mobile Edge Computing—A key Technology Towards 5G. 2015. Available online: www.etsi.org (accessed on 25 October 2023).
- The 5G Infrastructure Public Private Partnership. 5G Vision: The Next Generation of Communication Networks and Services. 2015. Available online: https://5g-ppp.eu/wp-content/uploads/2015/02/5G-Vision-Brochure-v1.pdf (accessed on 25 October 2023).
- Xie, Y.; Ho, I.W.H.; Magsino, E.R. The Modeling and Cross-Layer Optimization of 802.11p VANET Unicast. IEEE Access 2018, 6, 171–186. [Google Scholar] [CrossRef]
- De Maio, V.; Brandic, I. Multi-objective mobile edge provisioning in small cell clouds. In Proceedings of the 2019 ACM/SPEC International Conference on Performance Engineering—ICPE 2019, Mumbai, India, 7–11 April 2019; Association for Computing Machinery, Inc.: New York, NY, USA, 2019; pp. 127–138. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Fard, H.M.; Prodan, R.; Fahringer, T. Multi-objective list scheduling of workflow applications in distributed computing infrastructures. J. Parallel Distrib. Comput. 2014, 74, 2152–2165. [Google Scholar] [CrossRef]
- Wang, K.; Banerjee, A.; Shen, M.; Van Der Merwe, J.; Cho, J.; Webb, K. MobiScud: A fast moving personal cloud in the mobile network. In Proceedings of the 5th Workshop on All Things Cellular: Operations, Applications and Challenges—AllThingsCellular 2015, Part of SIGCOMM 2015, London, UK, 17 August 2015; Association for Computing Machinery, Inc.: New York, NY, USA, 2015; pp. 19–24. [Google Scholar] [CrossRef]
- Cho, J.; Nguyen, B.; Banerjee, A.; Ricci, R.; Van Der Merwe, J.; Webb, K. SMORE: Software-defined networking mobile offloading architecture. In Proceedings of the 4th ACM Workshop on All Things Cellular: Operations, Applications, and Challenges—AllThingsCellular 2014, Chicago, Illinois, USA, 22 August 2014; Association for Computing Machinery: New York, NY, USA, 2014; pp. 21–26. [Google Scholar] [CrossRef]
- Moreno-Vozmediano, R.; Montero, R.S.; Llorente, I.M. Iaas cloud architecture: From virtualized datacenters to federated cloud infrastructures. Computer 2012, 45, 65–72. [Google Scholar] [CrossRef]
- Taleb, T.; Ksentini, A.; Frangoudis, P.A. Follow-me cloud: When cloud services follow mobile users. IEEE Trans. Cloud Comput. 2019, 7, 369–382. [Google Scholar] [CrossRef]
- Taleb, T.; Ksentini, A. Follow me cloud interworking federated clouds and distributed mobile networks. IEEE Netw. 2013, 27, 12–19. [Google Scholar] [CrossRef]
- Sabella, D. Textbooks in Telecommunication Engineering Multi-Access Edge Computing: Software Development at the Network Edge. 2021. Available online: http://www.springer.com/series/13835 (accessed on 25 October 2023).
- GS MEC 003 V3.1.1; Multi-Access Edge Computing (MEC): Framework and Reference Architecture. ETSI: Valbonne, France, 2022.
- Albattah, W.; Habib, S.; Alsharekh, M.F.; Islam, M.; Albahli, S.; Dewi, D.A. An Overview of the Current Challenges, Trends, and Protocols in the Field of Vehicular Communication. Electronics 2022, 11, 3581. [Google Scholar] [CrossRef]
- Kenney, J.B. Dedicated Short-Range Communications (DSRC) Standards in the United States. Proc. IEEE 2011, 99, 1162–1182. [Google Scholar] [CrossRef]
- ETSI EN 302 663 v1.3.1Intelligent Transport Systems (ITS); ITS-G5 Access Layer Specification for Intelligent Transport Systems Operating in the 5GHz Frequency Band; ETSI: Valbonne, France, January 2020.
- Araniti, G.; Campolo, C.; Condoluci, M.; Iera, A.; Molinaro, A. LTE for vehicular networking: A survey. IEEE Commun. Mag. 2013, 51, 148–157. [Google Scholar] [CrossRef]
- Garcia, M.H.C.; Molina-Galan, A.; Boban, M.; Gozalvez, J.; Coll-Perales, B.; Şahin, T.; Kousaridas, A. A Tutorial on 5G NR V2X Communications. IEEE Commun. Surv. Tutor. 2021, 23, 1972–2026. [Google Scholar] [CrossRef]
- Mannoni, V.; Berg, V.; Sesia, S.; Perraud, E. A Comparison of the V2X Communication Systems: ITS-G5 and C-V2X. In Proceedings of the IEEE 89th Vehicular Technology Conference (VTC2019-Spring), Kuala Lumpur, Malaysia, 28 April–1 May 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Memedi, A.; Dressler, F. Vehicular Visible Light Communications: A Survey. IEEE Commun. Surv. Tutor. 2021, 23, 161–181. [Google Scholar] [CrossRef]
- Saleh, S.N.; Fathy, C. A Novel Deep-Learning Model for Remote Driver Monitoring in SDN-Based Internet of Autonomous Vehicles Using 5G Technologies. Appl. Sci. 2023, 13, 875. [Google Scholar] [CrossRef]
- Ji, X.; Xu, W.; Zhang, C.; Liu, B. A Three-level Routing Hierarchy in improved SDN-MEC-VANET Architecture. In Proceedings of the 2020 IEEE Wireless Communications and Networking Conference (WCNC), Seoul, Republic of Korea, 25–28 May 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Zhang, Q.; Li, C.; Huang, Y.; Luo, Y. Effective multi-controller management and adaptive service deployment strategy in multi-access edge computing environment. Ad Hoc Netw. 2023, 138, 103020. [Google Scholar] [CrossRef]
- Wang, H.; Lv, T.; Lin, Z.; Zeng, J. Energy-Delay Minimization of Task Migration Based on Game Theory in MEC-Assisted Vehicular Networks. IEEE Trans. Veh. Technol. 2022, 71, 8175–8188. [Google Scholar] [CrossRef]
- Lian, T.; Zhou, Y.; Wang, X.; Cheng, N.; Lu, N. Predictive Task Migration Modeling in Software Defined Vehicular Networks. In Proceedings of the IEEE 4th International Conference on Computer and Communication Systems, Singapore, 23–25 February 2019. [Google Scholar]
- Shah, S.D.A.; Gregory, M.A.; Li, S.; Fontes, R.D.R. SDN enhanced multi-access edge computing (MEC) for E2E mobility and QoS management. IEEE Access 2020, 8, 77459–77469. [Google Scholar] [CrossRef]
- MTR. ETSI GS MEC 002 V2.1.1. 2018. Available online: https://portal.etsi.org/TB/ETSIDeliverableStatus.aspx (accessed on 25 October 2023).
- Peng, H.; Ye, Q.; Shen, X.S. SDN-Based Resource Management for Autonomous Vehicular Networks: A Multi-Access Edge Computing Approach. IEEE Wirel. Commun. 2019, 26, 156–162. [Google Scholar] [CrossRef]
- Shah, S.D.A.; Gregory, M.A.; Li, S.; Fontes, R.D.R.; Hou, L. SDN-Based Service Mobility Management in MEC-Enabled 5G and Beyond Vehicular Networks. IEEE Internet Things J. 2022, 9, 13425–13442. [Google Scholar] [CrossRef]
- Safavat, S.; Rawat, D.B. Energy-Efficient Resource Scheduling Using X-CNN and CD-SBO for SDN based MEC Enabled IoV. In Proceedings of the 2023 IEEE 20th Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 8–11 January 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 411–416. [Google Scholar] [CrossRef]
- Smida, K.; Tounsi, H.; Frikha, M.; Song, Y.Q. FENS: Fog-Enabled Network Slicing in SDN/NFV-Based IoV. Wirel. Pers. Commun. 2022, 128, 2175–2202. [Google Scholar] [CrossRef]
- Lu, L.; Yu, J.; Du, H.; Li, X. A3C-based load-balancing solution for computation offloading in SDN-enabled vehicular edge computing networks. Peer to Peer Netw. Appl. 2023, 1, 3. [Google Scholar] [CrossRef]
- Digital Twin: Manufacturing Excellence through Virtual Factory Replication. Available online: https://www.researchgate.net/publication/275211047 (accessed on 25 October 2023).
- Kajba, M.; Jereb, B.; Obrecht, M. Considering IT Trends for Modelling Investments in Supply Chains by Prioritising Digital Twins. Processes 2023, 11, 262. [Google Scholar] [CrossRef]
- Dai, Y.; Zhang, Y. Adaptive Digital Twin for Vehicular Edge Computing and Networks. J. Commun. Inf. Networks 2022, 7, 48–59. [Google Scholar] [CrossRef]
- Xu, X.; Liu, Z.; Bilal, M.; Vimal, S.; Song, H. Computation Offloading and Service Caching for Intelligent Transportation Systems with Digital Twin. IEEE Trans. Intell. Transp. Syst. 2022, 23, 20757–20772. [Google Scholar] [CrossRef]
- Fan, B.; Wu, Y.; He, Z.; Chen, Y.; Quek, T.Q.S.; Xu, C.Z. Digital Twin Empowered Mobile Edge Computing for Intelligent Vehicular Lane-Changing. IEEE Netw. 2021, 35, 194–201. [Google Scholar] [CrossRef]
- Yuan, X.; Chen, J.; Zhang, N.; Ni, J.; Yu, F.R.; Leung, V.C.M. Digital Twin-Driven Vehicular Task Offloading and IRS Configuration in the Internet of Vehicles. IEEE Trans. Intell. Transp. Syst. 2022, 23, 24290–24304. [Google Scholar] [CrossRef]
- Ding, P.; Liu, D.; Shen, Y.; Duan, H.; Zheng, Q. Edge-to-Cloud Intelligent Vehicle-Infrastructure Based on 5G Time-Sensitive Network Integration. In Proceedings of the IEEE International Symposium on Broadband Multimedia Systems and Broadcasting, BMSB, Bilbao, Spain, 15–17 June 2022; IEEE Computer Society: Washington, DC, USA, 2022. [Google Scholar] [CrossRef]
- Syed, A.A.; Ayaz, S.; Leinmuller, T.; Chandra, M. Dynamic Scheduling and Routing for TSN based In-vehicle Networks. In Proceedings of the 2021 IEEE International Conference on Communications Workshops, ICC Workshops 2021—Proceedings, Virtual, 11–17 October 2021; Institute of Electrical and Electronics Engineers Inc.: New York, NY, USA, 2021. [Google Scholar] [CrossRef]
- Zheng, J.; Luan, T.H.; Gao, L.; Zhang, Y.; Wu, Y. Learning Based Task Offloading in Digital Twin Empowered Internet of Vehicles. 2021. Available online: http://arxiv.org/abs/2201.09076 (accessed on 25 October 2023).
- Zhang, K.; Cao, J.; Maharjan, S.; Zhang, Y. Digital Twin Empowered Content Caching in Social-Aware Vehicular Edge Networks. IEEE Trans. Comput. Soc. Syst. 2022, 9, 239–251. [Google Scholar] [CrossRef]
- Gong, Y.; Wei, Y.; Feng, Z.; Yu, F.R.; Zhang, Y. Resource Allocation for Integrated Sensing and Communication in Digital Twin Enabled Internet of Vehicles. IEEE Trans. Veh. Technol. 2022, 72, 4510–4524. [Google Scholar] [CrossRef]
- Zhou, Y.; Wu, J.; Lin, X.; Bashir, A.K.; Al-Otaibi, Y.D.; Xu, H. Secure Digital Twin Migration in Edge-based Autonomous Driving System. IEEE Consum. Electron. Mag. 2022, 12, 56–65. [Google Scholar] [CrossRef]
- He, C.; Luan, T.H.; Lu, R.; Su, Z.; Dong, M. Security and Privacy in Vehicular Digital Twin Networks: Challenges and Solutions. IEEE Wirel. Commun. 2022, 30, 154–160. [Google Scholar] [CrossRef]
- Barbi, M.; Ruiz, A.A.; Handzel, A.M.; Inca, S.; Garcia-Roger, D.; Monserrat, J.F. Simulation-based Digital Twin for 5G Connected Automated and Autonomous Vehicles. In Proceedings of the 2022 Joint European Conference on Networks and Communications and 6G Summit, EuCNC/6G Summit 2022, Grenoble, France, 7–10 June 2022; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2022; pp. 273–278. [Google Scholar] [CrossRef]
- Cai, G.; Fan, B.; Dong, Y.; Li, T.; Wu, Y.; Zhang, Y. Task-Efficiency Oriented V2X Communications: Digital Twin Meets Mobile Edge Computing. IEEE Wireless Communications. 2023. [Google Scholar] [CrossRef]
- Sabur, A.; Chowdhary, A.; Huang, D.; Alshamrani, A. Toward scalable graph-based security analysis for cloud networks. Comput. Netw. 2022, 206, 108795. [Google Scholar] [CrossRef]
- Wu, Y.; Xia, J.; Gao, C.; Ou, J.; Fan, C.; Ou, J.; Fan, D. Task offloading for vehicular edge computing with imperfect CSI: A deep reinforcement approach. Phys. Commun. 2022, 55, 101867. [Google Scholar] [CrossRef]
- Hejja, K.; Berri, S.; Labiod, H. Network slicing with load-balancing for task offloading in vehicular edge computing. Veh. Commun. 2022, 34, 100419. [Google Scholar] [CrossRef]
- Wang, K.; Tan, Y.; Shao, Z.; Ci, S.; Yang, Y. Learning-Based Task Offloading for Delay-Sensitive Applications in Dynamic Fog Networks. IEEE Trans. Veh. Technol. 2019, 68, 11399–11403. [Google Scholar] [CrossRef]
- Shabir, B.; Malik, A.W.; Rahman, A.U.; Khan, M.A.; Anwar, Z. A Reliable Learning Based Task Offloading Framework for Vehicular Edge Computing. In Proceedings of the 2022 2nd International Conference on Digital Futures and Transformative Technologies, ICoDT2 2022, Rawalpindi, Pakistan, 24–26 May 2022. [Google Scholar] [CrossRef]
- Qiao, B.; Liu, C.; Liu, J.; Hu, Y.; Li, K.; Li, K. Task migration computation offloading with low delay for mobile edge computing in vehicular networks. Concurr. Comput. 2022, 34, e6494. [Google Scholar] [CrossRef]
- Cui, Y.; Du, L.; He, P.; Wu, D.; Wang, R. Cooperative vehicles-assisted task offloading in vehicular networks. Trans. Emerg. Telecommun. Technol. 2022, 33, e4472. [Google Scholar] [CrossRef]
- Du, J.; Sun, Y.; Zhang, N.; Xiong, Z.; Sun, A.; Ding, Z.D. Cost-Effective Task Offloading in NOMA-Enabled Vehicular Mobile Edge Computing. IEEE Syst. J. 2022, 17, 928–939. [Google Scholar] [CrossRef]
- Ding, Z. Harvesting Devices’ Heterogeneous Energy Profiles and QoS Requirements in IoT: WPT-NOMA vs. BAC-NOMA. IEEE Trans. Commun. 2021, 69, 2837–2850. [Google Scholar] [CrossRef]
- Fan, W.; Liu, J.; Hua, M.; Wu, F.; Liu, Y. Joint Task Offloading and Resource Allocation for Multi-Access Edge Computing Assisted by Parked and Moving Vehicles. IEEE Trans. Veh. Technol. 2022, 71, 5314–5330. [Google Scholar] [CrossRef]
- Liu, L.; Zhao, M.; Yu, M.; Jan, M.A.; Lan, D.; Taherkordi, A. Mobility-Aware Multi-Hop Task Offloading for Autonomous Driving in Vehicular Edge Computing and Networks. IEEE Trans. Intell. Transp. Syst. 2022, 24, 2169–2182. [Google Scholar] [CrossRef]
- Zhan, Y.; Guo, S.; Li, P.; Zhang, J. A Deep Reinforcement Learning Based Offloading Game in Edge Computing. IEEE Trans. Comput. 2020, 69, 883–893. [Google Scholar] [CrossRef]
- Wu, Y.C.; Dinh, T.Q.; Fu, Y.; Lin, C.; Quek, T.Q.S. A Hybrid DQN and Optimization Approach for Strategy and Resource Allocation in MEC Networks. IEEE Trans. Wirel. Commun. 2021, 20, 4282–4295. [Google Scholar] [CrossRef]
- Han, D.; Chen, W.; Fang, Y. A Dynamic Pricing Strategy for Vehicle Assisted Mobile Edge Computing Systems. IEEE Wirel. Commun. Lett. 2019, 8, 420–423. [Google Scholar] [CrossRef]
- Dai, F.; Liu, G.; Mo, Q.; Xu, W.H.; Huang, B. Task offloading for vehicular edge computing with edge-cloud cooperation. World Wide Web 2022, 25, 1999–2017. [Google Scholar] [CrossRef]
- Zeng, F.; Tang, J.; Liu, C.; Deng, X.; Li, W. Task-Offloading Strategy Based on Performance Prediction in Vehicular Edge Computing. Mathematics 2022, 10, 1010. [Google Scholar] [CrossRef]
- Sun, Y.; Zhou, S.; Xu, J. EMM: Energy-aware mobility management for mobile edge computing in ultra-dense networks. IEEE J. Sel. Areas Commun. 2017, 35, 2637–2646. [Google Scholar] [CrossRef]
- Sonmez, C.; Ozgovde, A.; Ersoy, C. EdgeCloudSim: An environment for performance evaluation of Edge Computing systems. In Proceedings of the 2017 2nd International Conference on Fog and Mobile Edge Computing, FMEC 2017, Valencia, Spain, 8–11 May 2017; pp. 39–44. [Google Scholar] [CrossRef]
- Peng, H.; Wu, H.; Shen, X.S. Edge Intelligence for Multi-Dimensional Resource Management in Aerial-Assisted Vehicular Networks. IEEE Wirel. Commun. 2021, 28, 59–65. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, X.; Bian, X.; Cheng, Y.; Xiang, S. A Resource Allocation Scheme for Real-Time Energy-Aware Offloading in Vehicular Networks with MEC. Wirel. Commun. Mob. Comput. 2022, 2022, 8138079. [Google Scholar] [CrossRef]
- Zhu, A.; Wen, Y. An Efficient Resource Management Optimization Scheme for Internet of Vehicles in Edge Computing Environment. Comput. Intell. Neurosci. 2022, 2022, 3207456. [Google Scholar] [CrossRef]
- Zhou, Y.; Yi, C.; Zhu, K. Computation Resource Configuration for Vehicular Edge Computing: A Fluid-Model Based Approach. In Proceedings of the 2021 IEEE International Conference on Communications Workshops, ICC Workshops 2021, Montreal, QC, Canada, 14–23 June 2021. [Google Scholar] [CrossRef]
- Zhang, K.; Mao, Y.; Leng, S.; Maharjan, S.; Vinel, A.; Zhang, Y. Contract-theoretic Approach for Delay Constrained Offloading in Vehicular Edge Computing Networks. Mob. Netw. Appl. 2018, 24, 1003–1014. [Google Scholar] [CrossRef]
- Bi, J.; Yuan, H.; Duanmu, S.; Zhou, M.; Abusorrah, A. Energy-Optimized Partial Computation Offloading in Mobile-Edge Computing with Genetic Simulated-Annealing-Based Particle Swarm Optimization. IEEE Internet Things J. 2021, 8, 3774–3785. [Google Scholar] [CrossRef]
- Xiao, Z.; Dai, X.; Jiang, H.; Wang, D.; Chen, H.; Yang, L.; Zeng, F. Vehicular Task Offloading via Heat-Aware MEC Cooperation Using Game-Theoretic Method. IEEE Internet Things J. 2020, 7, 2038–2052. [Google Scholar] [CrossRef]
- Zeng, F.; Chen, Q.; Meng, L.; Wu, J. Volunteer Assisted Collaborative Offloading and Resource Allocation in Vehicular Edge Computing. IEEE Trans. Intell. Transp. Syst. 2021, 22, 3247–3257. [Google Scholar] [CrossRef]
- Sun, X.; Zhao, J.; Ma, X.; Li, Q. Enhancing the User Experience in Vehicular Edge Computing Networks: An Adaptive Resource Allocation Approach. IEEE Access 2019, 7, 161074–161087. [Google Scholar] [CrossRef]
- Lin, L.; Zhang, L. Joint Optimization of Offloading and Resource Allocation for SDN-Enabled IoV. Wirel. Commun. Mob. Comput. 2022, 2022, 2954987. [Google Scholar] [CrossRef]
- Li, Y.; Yang, B.; Wu, H.; Han, Q.; Chen, C.; Guan, X. Joint Offloading Decision and Resource Allocation for Vehicular Fog-Edge Computing Networks: A Contract-Stackelberg Approach. IEEE Internet Things J. 2022, 9, 15969–15982. [Google Scholar] [CrossRef]
- He, Y.; Wang, Y.W.; Lin, Q.; Li, J. Meta-Hierarchical Reinforcement Learning (MHRL)-Based Dynamic Resource Allocation for Dynamic Vehicular Networks. IEEE Trans. Veh. Technol. 2022, 71, 3495–3506. [Google Scholar] [CrossRef]
- Mnih, V.; Badia, A.P.; Mirza, M.; Graves, A.; Lillicrap, T.; Harley, T.; Silver, D.; Kavukcuoglu, K. Asynchronous Methods for Deep Reinforcement Learning. In Proceedings of the 33rd International Conference on Machine Learning, New York, NY, USA, 19–24 June 2016; Volume 48, pp. 1928–1937. [Google Scholar]
- Niu, B.; Liu, W.; Ma, Y.; Han, Y. Mobility-Aware Resource Allocation Based on Matching Theory in MEC. In Simulation Tools and Techniques, 13th EAI International Conference, SIMUtools 2021, Virtual Event, 5–6 November 2021; Lecture Notes of the Institute for Computer Sciences, Social-Informatics and Telecommunications Engineering, LNICST; Springer Science and Business Media: Cham, Switzerland, 2022; pp. 75–88. [Google Scholar] [CrossRef]
- Wang, S.; Xu, J.; Zhang, N.; Liu, Y. A Survey on Service Migration in Mobile Edge Computing. IEEE Access 2018, 6, 23511–23528. [Google Scholar] [CrossRef]
- Zhang, Y.; Qin, X.; Song, X. Mobility-Aware Cooperative Task Offloading and Resource Allocation in Vehicular Edge Computing. In Proceedings of the 2020 IEEE Wireless Communications and Networking Conference Workshops (WCNCW), Seoul, Republic of Korea, 6–9 April 2020. [Google Scholar]
- Jalilvand Aghdam Bonab, M.; Shaghaghi Kandovan, R. QoS-aware resource allocation in mobile edge computing networks: Using intelligent offloading and caching strategy. Peer-to-Peer Netw. Appl. 2022, 15, 1328–1344. [Google Scholar] [CrossRef]
- Dai, B.; Niu, J.; Ren, T.; Atiquzzaman, M. Towards Mobility-Aware Computation Offloading and Resource Allocation in End-Edge-Cloud Orchestrated Computing. IEEE Internet Things J. 2022, 9, 19450–19462. [Google Scholar] [CrossRef]
- Ren, J.; Zhang, D.; He, S.; Zhang, Y.; Li, T. A Survey on End-Edge-Cloud Orchestrated Network Computing Paradigms: Transparent computing, mobile edge computing, fog computing, and cloudlet. ACM Comput. Surv. 2019, 52, 1–36. [Google Scholar] [CrossRef]
- Silver, D.; Heess, N.; Degris, T.; Wierstra, D.; Riedmiller, M. Deterministic Policy Gradient Algorithms. In Proceedings of the International Conference on Machine Learning, Beijing, China, 22–24 June 2014. [Google Scholar]
- Fortunato, M.; Azar, M.G.; Piot, B.; Menick, J.; Osband, I.; Graves, A.; Mnih, V.; Munos, R.; Hassabis, D.; Pietquin, O.; et al. Noisy Networks for Exploration. In Proceedings of the International Conference on Representation Learning (ICLR 2018), Vancouver, BC, Canada, 30 April–3 May 2018. [Google Scholar]
- Palattella, M.R.; Scanzio, S.; Ergen, S.C. (Eds.) Ad-Hoc, Mobile, and Wireless Networks; Lecture Notes in Computer Science (LNCS, Volume 11803); Springer International Publishing: Cham, Switzerland, 2019. [Google Scholar] [CrossRef]
- OpenStreetMap. Available online: https://www.openstreetmap.org/#map=6/42.088/12.564 (accessed on 25 October 2023).
- Nguyen, Q.-H.; Morold, M.; David, K.; Dressler, F. Car-to-Pedestrian communication with MEC-support for adaptive safety of Vulnerable Road Users. Comput. Commun. 2020, 150, 83–93. [Google Scholar] [CrossRef]
- Barmpounakis, S.; Tsiatsios, G.; Papadakis, M.; Mitsianis, E.; Koursioumpas, N.; Alonistioti, N. Collision avoidance in 5G using MEC and NFV: The vulnerable road user safety use case. Comput. Netw. 2020, 172, 107150. [Google Scholar] [CrossRef]
- Nevigato, N.; Tropea, M.; De Rango, F. Collision Avoidance Proposal in a MEC based VANET environment. In Proceedings of the ACM 24th International Symposium on Distributed Simulation and Real Time Applications (DS-RT), Prague, Czech Republic, 14–16 September 2020. [Google Scholar]
- Docker: Accelerated, Containerized Application Development. Available online: https://www.docker.com/ (accessed on 25 October 2023).
- Kubernetes. Available online: https://kubernetes.io/ (accessed on 25 October 2023).
- Eclipse SUMO—Simulation of Urban MObility. Available online: https://www.eclipse.org/sumo/ (accessed on 25 October 2023).
- Liu, B.; Deng, D.; Rao, W.; Wang, E.; Xiong, S.; Jia, D.; Wang, J.; Qiao, C. CPA-MAC: A Collision Prediction and Avoidance MAC for Safety Message Dissemination in MEC-Assisted VANETs. IEEE Trans. Netw. Sci. Eng. 2022, 9, 783–794. [Google Scholar] [CrossRef]
- Malinverno, M.; Avino, G.; Casetti, C.; Chiasserini, C.F.; Malandrino, F.; Scarpina, S. Edge-Based Collision Avoidance for Vehicles and Vulnerable Users: An Architecture Based on MEC. IEEE Veh. Technol. Mag. 2020, 15, 27–35. [Google Scholar] [CrossRef]
- Miller, R.; Huang, Q. An adaptive peer-to-peer collision warning system. In Proceedings of the IEEE 55th Vehicular Technology Conference, Birmingham, AL, USA, 6–9 May 2002; Volume 1, pp. 317–321. [Google Scholar] [CrossRef]
- Brik, B.; Ksentini, A. Toward Optimal MEC Resource Dimensioning for a Vehicle Collision Avoidance System: A Deep Learning Approach. IEEE Netw. 2021, 35, 74–80. [Google Scholar] [CrossRef]
- Dabbene, S.; Lehmann, C.; Campolo, C.; Molinaro, A.; Fitzek, F.H.P. A MEC-assisted Vehicle Platooning Control through Docker Containers. In Proceedings of the 2020 IEEE 3rd Connected and Automated Vehicles Symposium, CAVS 2020, Victoria, BC, Canada, 18 November–16 December 2020. [Google Scholar] [CrossRef]
- Lou, H.; Hu, F.; Li, J.; Zheng, X.; Shi, Y. An Extended Adaptive Large Neighbourhood Search for Vehicles’ Task Offloading in Platooning. In Proceedings of the 2022 IEEE 25th International Conference on Computer Supported Cooperative Work in Design, CSCWD 2022, Hangzhou, China, 4–6 May 2022; pp. 582–587. [Google Scholar] [CrossRef]
- Chen, C.; Zhang, Y.; Khosravi, M.R.; Pei, Q.; Wan, S. An Intelligent Platooning Algorithm for Sustainable Transportation Systems in Smart Cities. IEEE Sens. J. 2021, 21, 15437–15447. [Google Scholar] [CrossRef]
- Liang, D.; Li, T.; Li, J.; Zheng, X.; Shi, Y. A Leader-Follower Model with Communication Delay for Platooning Control in Highway Scenario. In Proceedings of the 2022 IEEE 25th International Conference on Computer Supported Cooperative Work in Design, CSCWD 2022, Hangzhou, China, 4–6 May 2022; pp. 588–593. [Google Scholar] [CrossRef]
- Xiao, T.; Chen, C.; Pei, Q.; Song, H.H. Consortium Blockchain-Based Computation Offloading Using Mobile Edge Platoon Cloud in Internet of Vehicles. IEEE Trans. Intell. Transp. Syst. 2022, 23, 17769–17783. [Google Scholar] [CrossRef]
- Chang, B.-J.; Hwang, R.-H.; Tsai, Y.-L.; Yu, B.-H.; Liang, Y.-H. Cooperative Adaptive Driving for Platooning Autonomous Self Driving Based on Edge Computing. Int. J. Appl. Math. Comput. Sci. 2019, 29, 213–225. [Google Scholar] [CrossRef]
- Abuelela, M. Taking VANET to the Clouds. In Proceedings of the 8th International Conference on Advances in Mobile Computing and Multimedia (MoMM2010), Paris, France, 8–10 November 2010. [Google Scholar]
- Palmieri, M.; Quadri, C.; Fagiolini, A.; Rossi, G.P.; Bernardeschi, C. Co-simulated Digital Twin on the Network Edge: The case of platooning. In Proceedings of the 2022 IEEE 23rd International Symposium on a World of Wireless, Mobile and Multimedia Networks, WoWMoM 2022, Belfast, UK, 14–17 June 2022; pp. 613–618. [Google Scholar] [CrossRef]
- Quadri, C.; Mancuso, V.; Marsan, M.A.; Rossi, G.P. Edge-based platoon control. Comput. Commun. 2021, 181, 17–31. [Google Scholar] [CrossRef]
- Ayimba, C.; Segata, M.; Casari, P.; Mancuso, V. Closer than Close: MEC-Assisted Platooning with Intelligent Controller Migration. In Proceedings of the MSWiM 2021—Proceedings of the 24th International ACM Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems, Alicante, Spain, 22–26 November 2021; pp. 23–32. [Google Scholar] [CrossRef]
- Xiao, T.; Chen, C.; Wan, S. Mobile-Edge-Platooning Cloud: A Lightweight Cloud in Vehicular Networks. IEEE Wirel. Commun. 2022, 29, 87–94. [Google Scholar] [CrossRef]
- Bai, J.; Chang, X.; Trivedi, K.S.; Han, Z. Resilience-Driven Quantitative Analysis of Vehicle Platooning Service. IEEE Trans. Veh. Technol. 2021, 70, 5378–5389. [Google Scholar] [CrossRef]
- Ayimba, C.; Segata, M.; Casari, P.; Mancuso, V. Driving under influence: Robust controller migration for MEC-enabled platooning. Comput. Commun. 2022, 194, 135–147. [Google Scholar] [CrossRef]
- Virdis, A.; Nardini, G.; Stea, G. A Framework for MEC-enabled Platooning. In Proceedings of the CLEEN 2019 Workshop of WCNC, Marrakech, Morocco, 15–18 April 2019. [Google Scholar] [CrossRef]
- Scheuer, A.; Simonin, O.; Charpillet, F. Safe longitudinal platoons of vehicles without communication. In Proceedings of the IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 70–75. [Google Scholar] [CrossRef]
- Nardini, G.; Noferi, A.; Stea, G. Platooning-as-a-Service in a Multi-Operator ETSI MEC Environment. IEEE Access 2023, 11, 60040–60058. [Google Scholar] [CrossRef]
- Cui, T.; Hu, Y.; Shen, B.; Chen, Q. Task offloading based on Lyapunov optimization for MEC-assisted vehicular platooning networks. Sensors 2019, 19, 4974. [Google Scholar] [CrossRef]
- 3GPP—The Mobile Broadband Standard. Available online: https://www.3gpp.org/ (accessed on 25 October 2023).
- ISO/TC 204; Intelligent Transport Systems. SAE International: Warrendale, PA, USA, 1992. Available online: https://www.iso.org/committee/54706.html (accessed on 25 October 2023).
- ETSI. Automotive Intelligent Transport Systems (ITS). Available online: https://www.etsi.org/technologies/automotive-intelligent-transport (accessed on 25 October 2023).
- 5GAA. Available online: https://5gaa.org/ (accessed on 25 October 2023).
- 5G-PPP. Available online: https://5g-ppp.eu/ (accessed on 25 October 2023).
- Marquez-Barja, J.M.; Hadiwardoyo, S.; Lannoo, B.; Vandenberghe, W.; Kenis, E.; Deckers, L.; Campodonico, M.C.; dos Santos, K.; Kusumakar, R.; Klepper, M.; et al. Enhanced teleoperated transport and logistics: A 5G cross-border use case. In Proceedings of the 2021 Joint European Conference on Networks and Communications and 6G Summit, EuCNC/6G Summit 2021, Porto, Portugal, 8–11 June 2021; pp. 229–234. [Google Scholar] [CrossRef]
- Marquez-Barja, J.; Hadiwardoyo, S.A.; Maglogiannis, V.; Naudts, D.; Moerman, I.; Hellinckx, P.; Verbrugge, S.; Delaere, S.; Vandenberghe, W.; Kenis, E.; et al. Enabling cross-border tele-operated transport in the 5G Era: The 5G Blueprint approach. In Proceedings of the 2021 IEEE 18th Annual Consumer Communications and Networking Conference, CCNC 2021, Las Vegas, NV, USA, 9–12 January 2021. [Google Scholar] [CrossRef]
- Khan, H.; Samarakoon, S.; Bennis, M. Enhancing Video Streaming in Vehicular Networks via Resource Slicing. IEEE Trans. Veh. Technol. 2020, 69, 3513–3522. Available online: http://arxiv.org/abs/2002.06928 (accessed on 25 October 2023). [CrossRef]
- 5G Americas Staff. 5G Americas Whitepaper: Cellular V2X Communications towards 5G; 5G Americas: Bellevue, WA, USA, 2018. [Google Scholar]
- Velez, G.; Perez, J.; Martin, A. 5G MEC-enabled vehicle discovery service for streaming-based CAM applications. Multimedia Tools Appl. 2022, 81, 12349–12370. [Google Scholar] [CrossRef]
- Tran, T.X.; Pompili, D.; Member, S. Adaptive Bitrate Video Caching and Processing in Mobile-Edge Computing Networks. IEEE Trans. Mob. Comput. 2018, 18, 1965–1978. [Google Scholar] [CrossRef]
- Pedersen, H.A.; Dey, S. Enhancing mobile video capacity and quality using rate adaptation, RAN caching and processing. IEEE/ACM Trans. Netw. 2016, 24, 996–1010. [Google Scholar] [CrossRef]
- Luo, Z.; Liwang, M. Intelligent Caching for Mobile Video Streaming in Vehicular Networks with Deep Reinforcement Learning. Appl. Sci. 2022, 12, 11942. [Google Scholar] [CrossRef]
- Choi, Y.; Lim, Y. Edge Caching Based on Deep Reinforcement Learning in Vehicular Networks. In Proceedings of the 4th IEEE Eurasia Conference on IoT, Communication and Engineering 2022, ECICE 2022, Yunlin, Taiwan, 28–30 October 2022; pp. 57–59. [Google Scholar] [CrossRef]
- Yang, R.; Guo, S. A Mobile Edge Caching Strategy for Video Grouping in Vehicular Networks. In Proceedings of the 2021 13th International Conference on Advanced Computational Intelligence, ICACI 2021, Wanzhou, China, 14–16 May 2021; pp. 40–45. [Google Scholar] [CrossRef]
- Girko, V.L. Random matrices. In Handbook of Algebra; Elsevier: Amsterdam, The Netherlands, 1996; Volume 1, pp. 27–78. [Google Scholar] [CrossRef]
- Han, L.; Li, S.; Ao, C.; Liu, Y.; Liu, G.; Zhang, Y.; Zhao, J. MEC-Based Cooperative Multimedia Caching Mechanism for the Internet of Vehicles. Wirel. Commun. Mob. Comput. 2022, 2022, 8777890. [Google Scholar] [CrossRef]
- Madarasingha, C.; Thilakarathna, K.; Zomaya, A. OpCASH: Optimized Utilization of MEC Cache for 360-Degree Video Streaming with Dynamic Tiling. In Proceedings of the 2022 IEEE International Conference on Pervasive Computing and Communications, PerCom 2022, Pisa, Italy, 21–25 March 2022; pp. 34–43. [Google Scholar] [CrossRef]
- Abbas, F.; Fan, P.; Khan, Z. A Novel Low-Latency V2V Resource Allocation Scheme Based on Cellular V2X Communications. IEEE Trans. Intell. Transp. Syst. 2018, 20, 2185–2197. [Google Scholar] [CrossRef]
- Dai, Y.; Xu, D.; Maharjan, S.; Zhang, Y. Joint load balancing and offloading in vehicular edge computing and networks. IEEE Internet Things J. 2018, 6, 4377–4387. [Google Scholar] [CrossRef]
- Liu, Y.; Yu, H.; Xie, S.; Zhang, Y. Deep Reinforcement Learning for Offloading and Resource Allocation in Vehicle Edge Computing and Networks. IEEE Trans. Veh. Technol. 2019, 68, 11158–11168. [Google Scholar] [CrossRef]
- Chen, C.; Chen, L.; Liu, L.; He, S.; Yuan, X.; Lan, D.; Chen, Z. Delay-optimized V2V-based computation offloading in urban vehicular edge computing and networks. IEEE Access 2020, 8, 18863–18873. [Google Scholar] [CrossRef]
- Zhou, J.; Tian, D.; Wang, Y.; Sheng, Z.; Duan, X.; Leung, V.C. Reliability-optimal cooperative communication and computing in connected vehicle systems. IEEE Trans. Mob. Comput. 2020, 19, 1216–1232. [Google Scholar] [CrossRef]
- Nam, Y.; Bang, J.; Choi, H.; Shin, Y.; Lee, E. Cooperative Content Precaching Scheme Based on the Mobility Information of Vehicles in Intermittently Connected Vehicular Networks. Electronics 2022, 11, 3663. [Google Scholar] [CrossRef]
- Naderi, M.; Zargari, F.; Ghanbari, M. Adaptive beacon broadcast in opportunistic routing for VANETs. Ad Hoc Netw. 2018, 86, 119–130. [Google Scholar] [CrossRef]
- Bute, M.S.; Fan, P.; Liu, G.; Abbas, F.; Ding, Z. A cluster-based cooperative computation offloading scheme for C-V2X networks. Ad Hoc Netw. 2022, 132, 102862. [Google Scholar] [CrossRef]
- Nguyen, K.; Drew, S.; Huang, C.; Zhou, J. Collaborative Container-based Parked Vehicle Edge Computing Framework for Online Task Offloading. In Proceedings of the 2020 IEEE 9th International Conference on Cloud Networking, CloudNet, Piscataway, NJ, USA, 9–11 November 2020. [Google Scholar] [CrossRef]
- Nguyen, K.; Drew, S.; Huang, C.; Zhou, J. Parked Vehicles Task Offloading in Edge Computing. IEEE Access 2022, 10, 41592–41606. [Google Scholar] [CrossRef]
- Addali, K.; Kadoch, M. Enhanced Mobility Load Balancing Algorithm for 5G Small Cell Networks. In Proceedings of the IEEE Canadian Conference of Electrical and Computer Engineering (CCECE), Edmonton, AB, Canada, 5–8 May 2019. [Google Scholar]
- Wang, H.; Ke, H.; Liu, G.; Sun, W. Computation migration and resource allocation in heterogeneous vehicular networks: A deep reinforcement learning approach. IEEE Access 2020, 8, 171140–171153. [Google Scholar] [CrossRef]
- Moon, S.; Lim, Y. Task Migration with Partitioning for Load Balancing in Collaborative Edge Computing. Appl. Sci. 2022, 12, 1168. [Google Scholar] [CrossRef]








| Reference | Year | Main Contribution |
|---|---|---|
| [7] | 2018 | Various applications of MEC in different network areas of IoT |
| [8] | 2019 | Architectures of MEC, use cases, and challenges in IoT |
| [9] | 2022 | MEC-enabled 5G use cases, security |
| [10] | 2023 | Mobility of IoT devices |
| [11] | 2022 | Use cases and challenges of MEC in VNs |
| [12] | 2022 | Fundamentals, enablers, and challenges of MEC in IoT |
| [13] | 2019 | Mobility issues of both content-caching nodes and end devices |
| [14] | 2022 | MEC for V2X architectures and applications |
| [15] | 2023 | Comparison of offloading strategies in MEC |
| [16] | 2023 | Task-offloading algorithms and optimization approaches in MEC |
| [17] | 2023 | A review of the research status of MIMO-MEC networks |
| This work | End of 2023 | Using MEC for task offloading in V2X (Section 5); using MEC to enable V2X applications (Section 6); using vehicles to enhance MEC (Section 7) |
| Reference | Methodology | Key Metrics | Computing Method | Focused Infrastructure | Mobility Consideration |
|---|---|---|---|---|---|
| [96] | IoV with imperfect CSI—using DRL | Computation delay and energy consumption | MEC server | V2I | No |
| [97] | Network slicing | Delay | Local—MEC server | V2V-V2I | Yes |
| [99] | Multiuser MEC assisted | Delay and energy consumption | Local—MEC server | V2V-V2I | No |
| [100] | A heuristic task migration | Delay | Local—MEC server | V2I | Yes |
| [101] | Distributed task-offloading framework—DDQN optimization | Delay and resource management | Local—MEC server | V2I | Yes |
| [103] | NOMA and MEC merging | Delay and resource utilization | Local | V2V | Yes |
| [104] | Task offloading using parked and moving vehicles | Processing delay | MEC server—cloud server | V2I-I2I | No |
| [105] | Multihop task offloading | Service-delay prediction | MEC server—cloud server | V2I | No |
| [106] | Decentralized DRL—task offloading with game theory algorithm | Latency and energy consumption | MEC server | V2I | No |
| [107] | Generic MEC system—a hybrid DQN and optimization approach for task-offloading strategy | Resource consumption | Local—MEC server | V2V-V2I | Yes |
| [108] | Probabilistic scheduling approach—two-dimensional Markov chain | Load balancing | MEC server | V2I | No |
| [109] | Computation offloading | Latency and overhead | Local—MEC server | V2I | No |
| Ref. | Type of Problem | Objective Function | Number of Variables | Number of Constraints | Algorithm Used |
|---|---|---|---|---|---|
| [96] | Convex | Minimizing the total overhead | DRL and Lagrangian multiplier | ||
| [97] | Integer linear | Maximizing the accepted offloading tasks | Network slicing and load balancing, VECSlic-LB | ||
| [99] | Non-convex | Minimizing response time of the task | Learning-based task-offloading framework based on the multiarm bandit | ||
| [100] | Convex | Diminishing average delay | Task migration cooperative offloading | ||
| [101] | Non-convex | Minimizing the total system delay | DRL-DDQN | ||
| [105] | Mixed-integer linear | Minimizing execution time and computation cost | Quadratically Constrained Quadratic Programming (QCQP) problem and semidefinite relaxation | ||
| [108] | Linear | Minimizing cost | Markov chain | ||
| [109] | Non-convex | Minimizing the averageprocessing delay | DQN and RMSProp optimizer | ||
| [110] | Integer linear | Maximizing success offloading tasks and minimizing service delay | Convolutional Neural Network (CNN) |
| Reference | Methodology | Key Metrics | Focused Component |
|---|---|---|---|
| [115] | Real-time energy-aware offloading using MINLP | Energy consumption | Vehicles |
| [116] | Resource management optimization with DRL | Network traffic and overhead | MEC server and vehicles |
| [117] | Threshold-based computation resource configuration | Computation resource demand and processor power | MEC server |
| [122] | Adaptive resource allocation | Processing capacity, radio resources | MEC server |
| [123] | SDN-enabled IoV resource allocation with PSO algorithm | Processing capacity, radio resources | MEC server and vehicles |
| [124] | A contract-Stackelberg approach | Idle resources of vehicles | Vehicles |
| [125] | Dynamic resource management with MDP | Dynamic network conditions | MEC server |
| [127] | Mobility-aware resource allocation based on matching theory | Mobility of users and constrained resources | MEC server |
| [130] | Intelligent offloading and caching strategy | Energy efficiency | MEC server and vehicles |
| [131] | Mobility-aware EECOC task scheduling with DRL | Task latency | MEC server |
| Reference | Methodology | Computing Place | Focused Connection |
|---|---|---|---|
| [68] | Safety management in tele-operated driving | MEC server | V2I |
| [135] | Detecting and solving road hazards | Vehicle, MEC server, cloud server | V2I |
| [137] | Detecting car-to-pedestrian hazards | User cellphone | V2V-V2I |
| [138] | Detecting vulnerable road users, avoiding car accidents | MEC server, cloud server | V2X |
| [139] | Crash anticipation-assisted steering system | MEC server | V2I |
| [144] | Detecting car-to-pedestrian hazards | MEC server, vehicles, user cellphone | V2X |
| [146] | Assigning processing resource to collision detection system | MEC | V2I |
| [147] | Platooning, cooperative adaptive cruise control | Vehicle, MEC server | V2V-V2I |
| [148] | Platooning, optimizing task offloading and resource allocation | MEC server | V2V-V2I |
| [149] | Platooning, conserving fuel, and increasing traffic effectiveness | MEC server | V2I |
| [150] | Platooning, short delay, and high reliability | Vehicle, MEC server, cloud server | V2V-V2I |
| [151] | Platooning resource allocation | MEC server | V2I |
| [152] | Platooning, cooperative adapted driving | Vehicle, MEC server, cloud server | V2V-V2I |
| [154] | Platooning, cooperative adaptive cruise control | Vehicle, MEC server | V2V-V2I |
| [155] | Infrastructure-focused platoon management | Vehicle, MEC server | V2V-V2I-V2N |
| [156] | Centralized control of a platoon | MEC server, cloud server | V2I |
| [158] | Generating and controlling behaviors of the platooning vehicles | Vehicle, MEC server | V2V-V2I |
| [159] | Migration of the platoon controller | MEC server | V2I |
| [162] | Controlling power of task offloading for vehicular platooning | MEC server | V2I |
| [168] | Tele-operated transport approach | MEC server | V2I |
| [172] | Video streaming | MEC server | V2V-V2I |
| [173] | Video streaming with caching mechanism | MEC server | V2I |
| [175] | Video streaming with bandwidth saving and reduced data communication times | MEC server | V2I |
| [176] | Video streaming with a buffering method | MEC server | V2I |
| [177] | Video streaming clustered video caching | Vehicle, MEC server | V2V-V2I |
| [179] | Video streaming with hierarchical cooperative cache architecture | Vehicle, MEC server | V2V-V2I |
| [180] | MEC cache for 360-degree video streaming | MEC server | V2I |
| Reference | Methodology | Mobility Consideration | Focused Connection |
|---|---|---|---|
| [101] | Cooperative vehicle-assisted task offloading | Yes | V2I |
| [185] | Cooperative task offloading with vehicles, MEC, and cloudlet | Yes | V2V-V2I |
| [186] | Offloading service with best-relaying vehicle to requesting vehicle | Yes | V2X |
| [188] | Cooperative task offloading to VEC and MEC servers | Yes | V2I |
| [189] | Collaborative EdgePV, parked vehicle resources | No | V2X |
| [184] | Moving vehicles with a resource pool | Yes | V2I |
| [190] | Collaborative EdgeGA, parked vehicle resources | No | V2V-V2I |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pashazadeh, A.; Nardini, G.; Stea, G. A Comprehensive Survey Exploring the Multifaceted Interplay between Mobile Edge Computing and Vehicular Networks. Future Internet 2023, 15, 391. https://doi.org/10.3390/fi15120391
Pashazadeh A, Nardini G, Stea G. A Comprehensive Survey Exploring the Multifaceted Interplay between Mobile Edge Computing and Vehicular Networks. Future Internet. 2023; 15(12):391. https://doi.org/10.3390/fi15120391
Chicago/Turabian StylePashazadeh, Ali, Giovanni Nardini, and Giovanni Stea. 2023. "A Comprehensive Survey Exploring the Multifaceted Interplay between Mobile Edge Computing and Vehicular Networks" Future Internet 15, no. 12: 391. https://doi.org/10.3390/fi15120391
APA StylePashazadeh, A., Nardini, G., & Stea, G. (2023). A Comprehensive Survey Exploring the Multifaceted Interplay between Mobile Edge Computing and Vehicular Networks. Future Internet, 15(12), 391. https://doi.org/10.3390/fi15120391