
Reinforcement Learning Approach for Adaptive C-V2X Resource Management



Abstract
:
1. Introduction
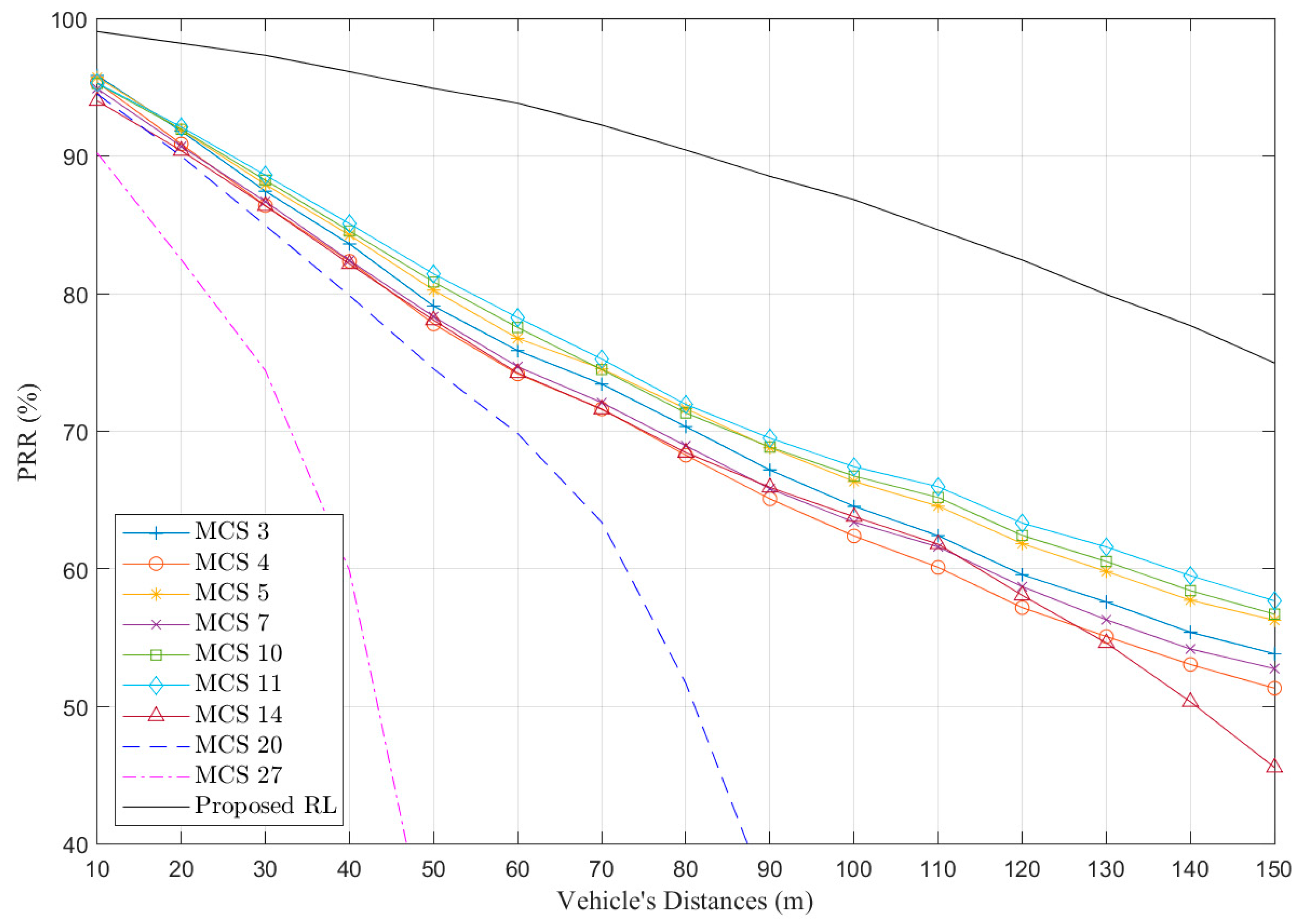
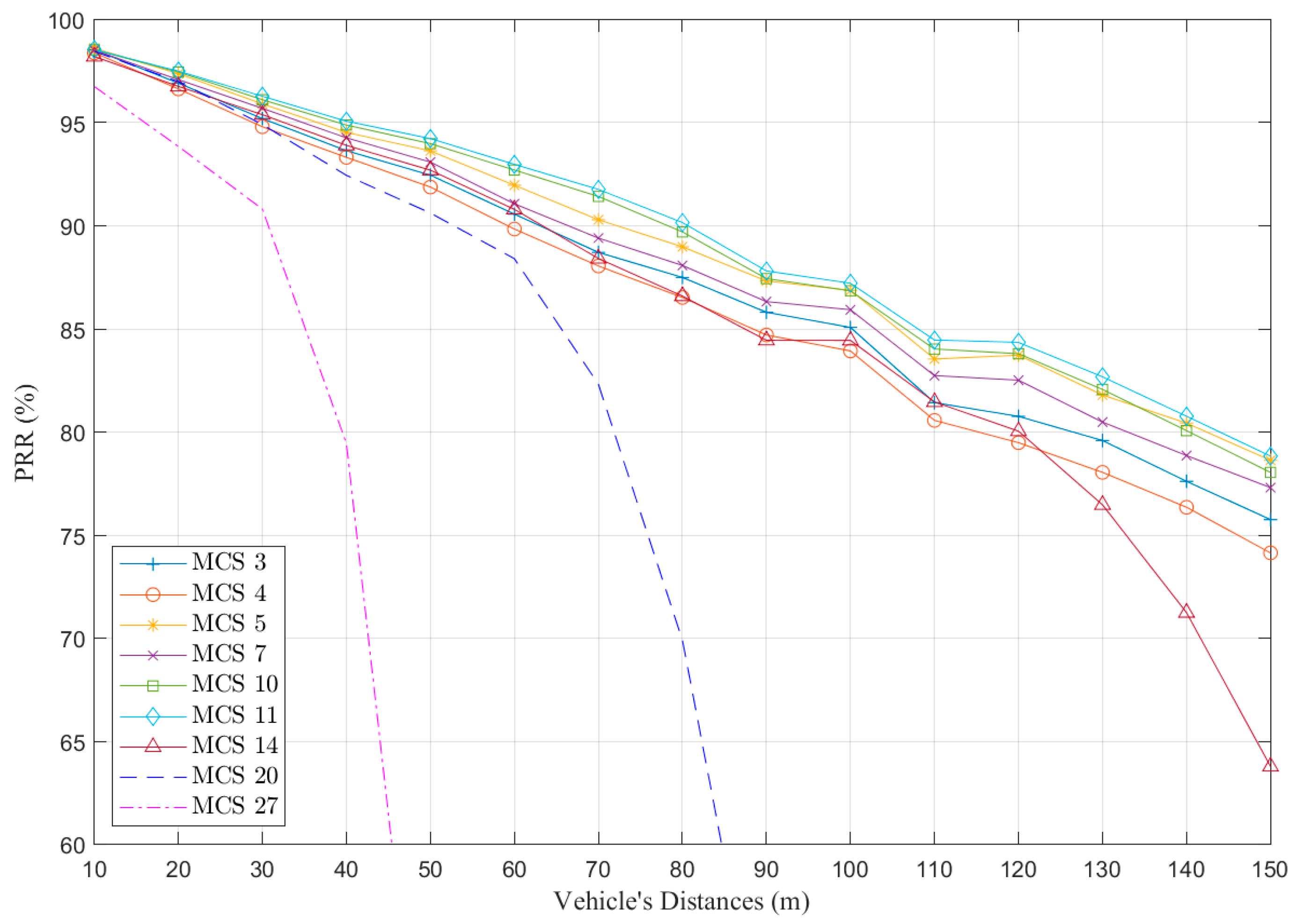
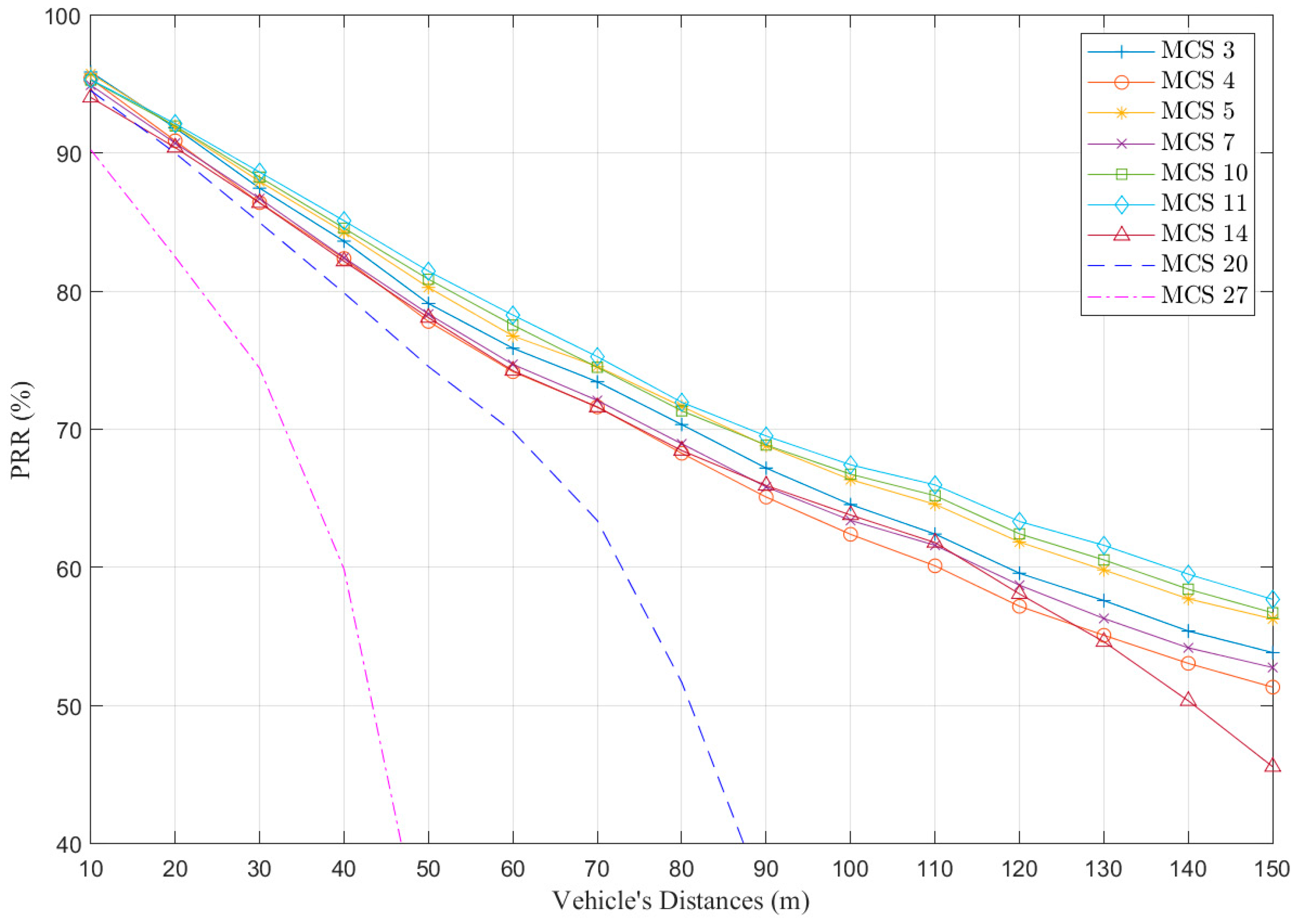
- We conducted several simulations and showed that static MCS index values had yet to achieve optimal performance.
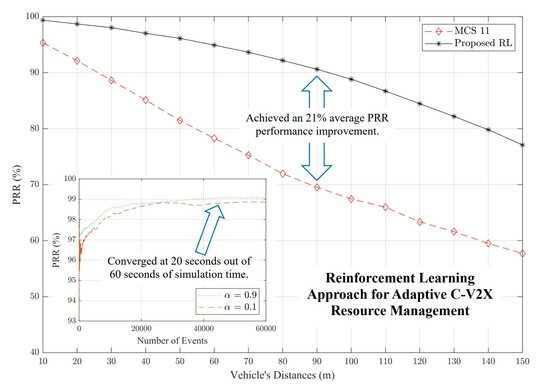
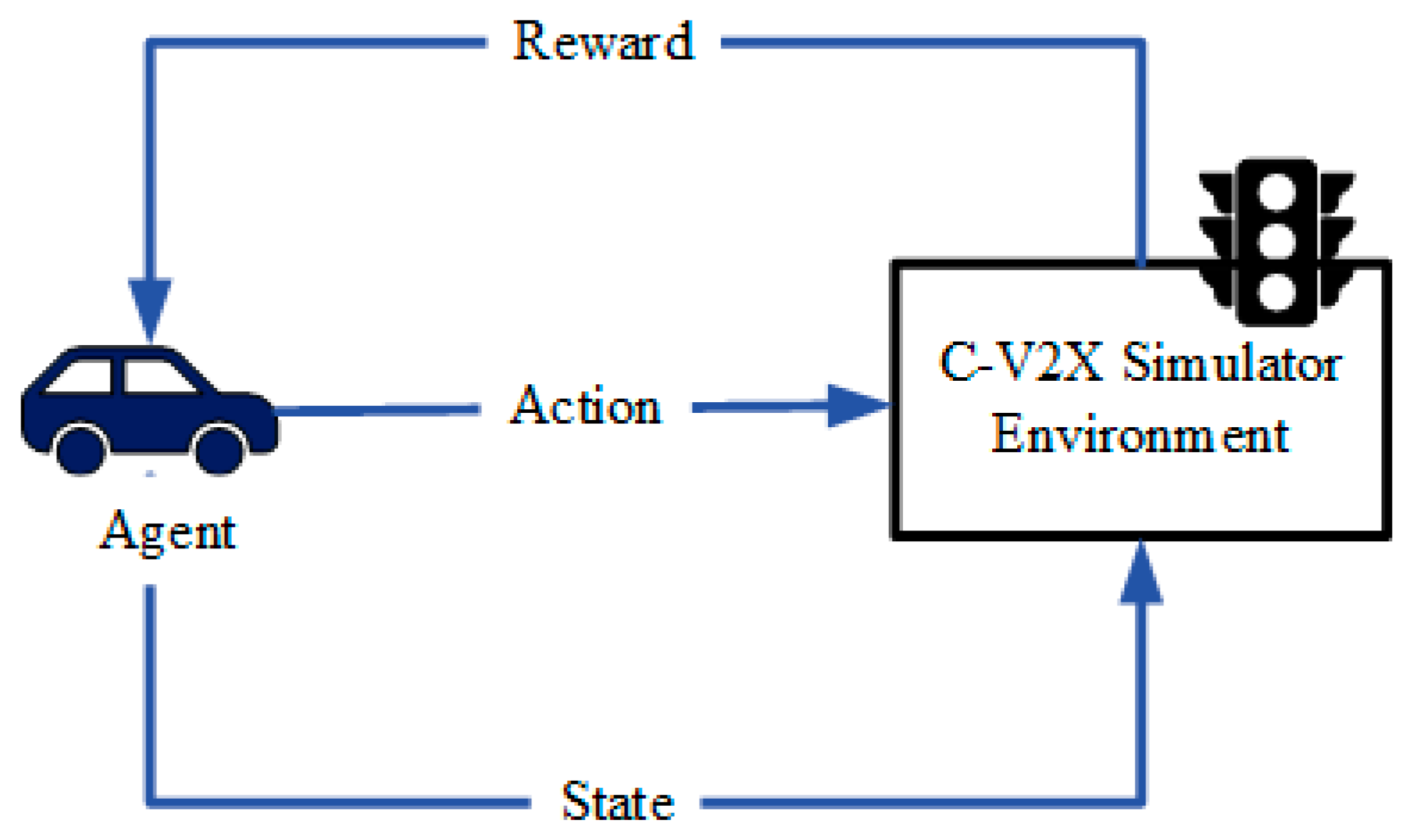
- We proposed a design of the Q-Learning RL approach to override the MCS index value dynamically.
- Our RL algorithm approach was built on a MATLAB-based simulator and learned as the simulation ran within the specified time limit (T).
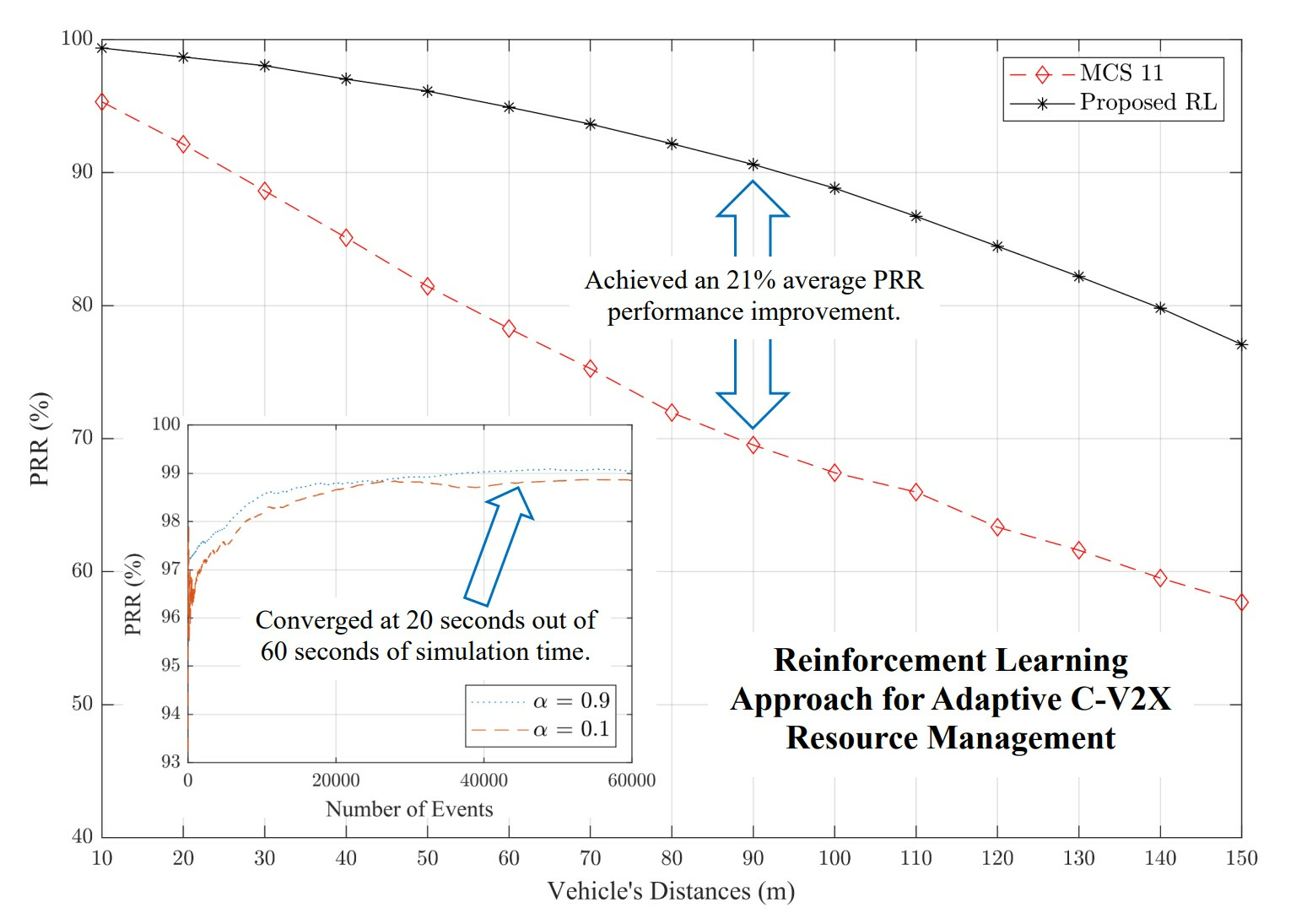
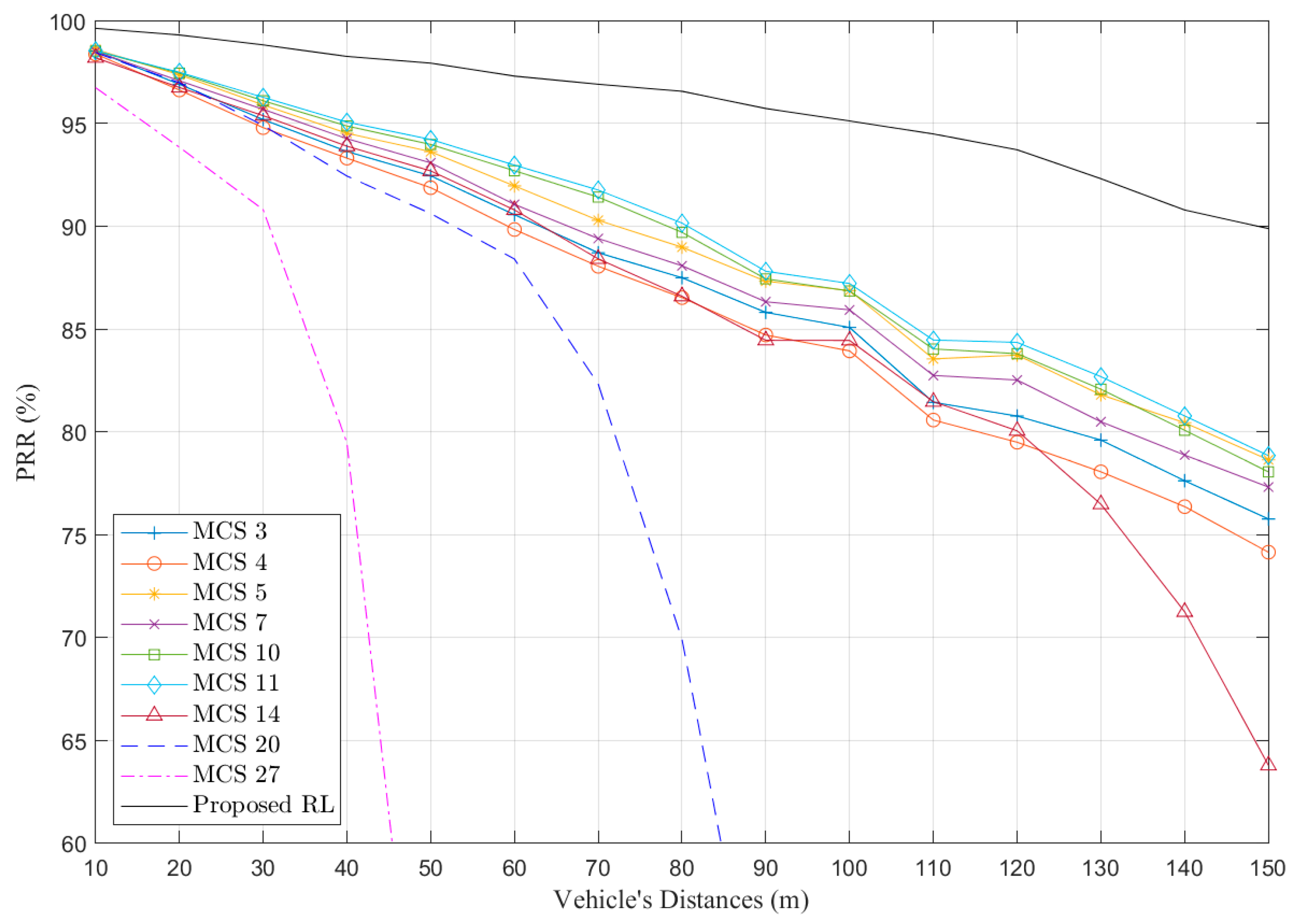
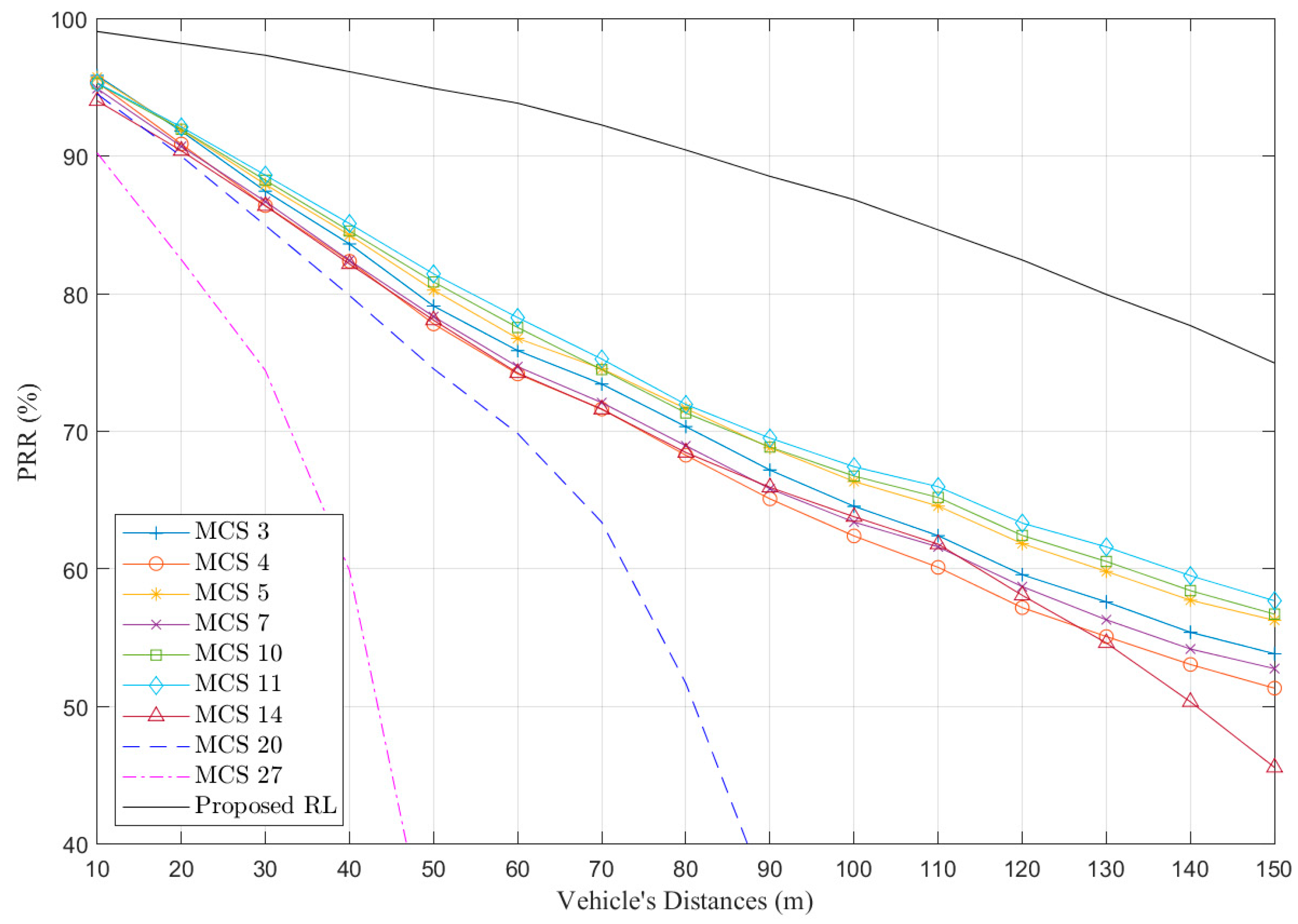
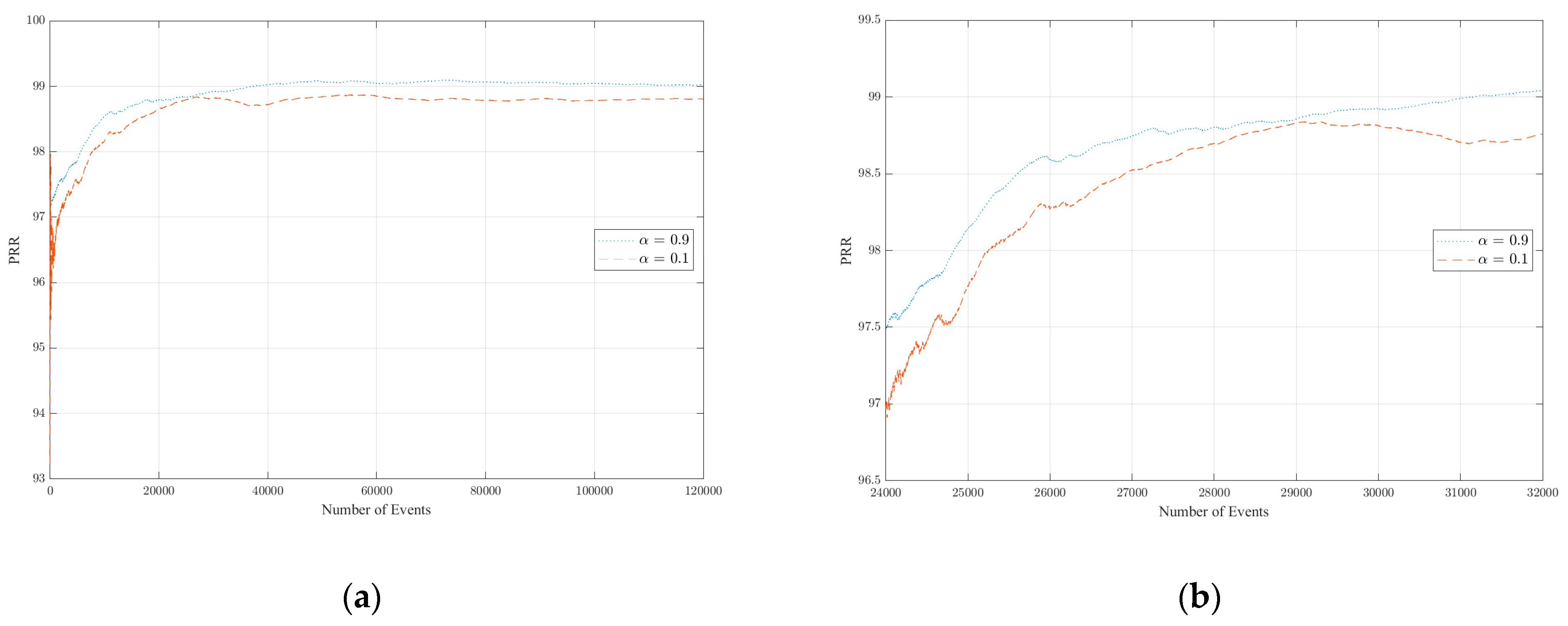
- Performance measurement was carried out by comparing PRR results for each static MCS index value scenario with our proposed RL approach.
2. C-V2X Mode 4
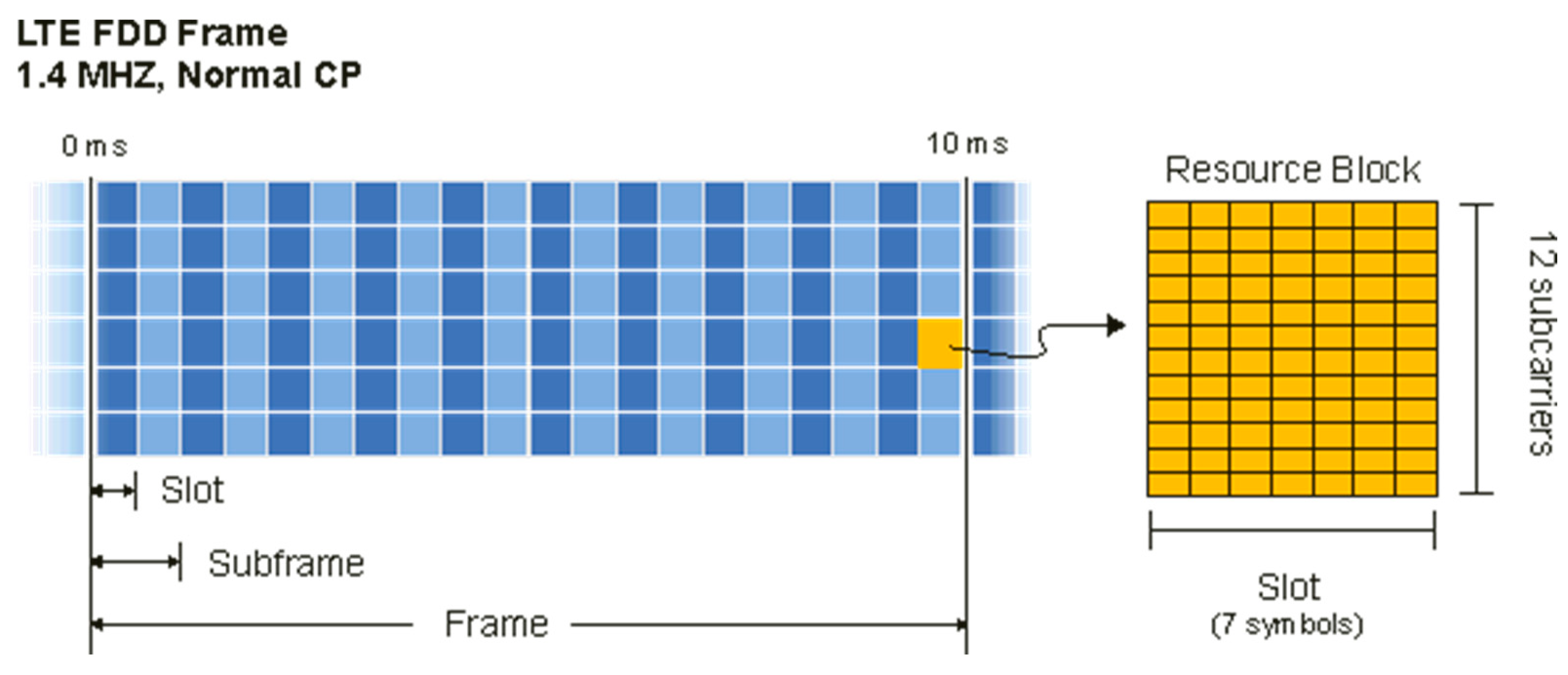
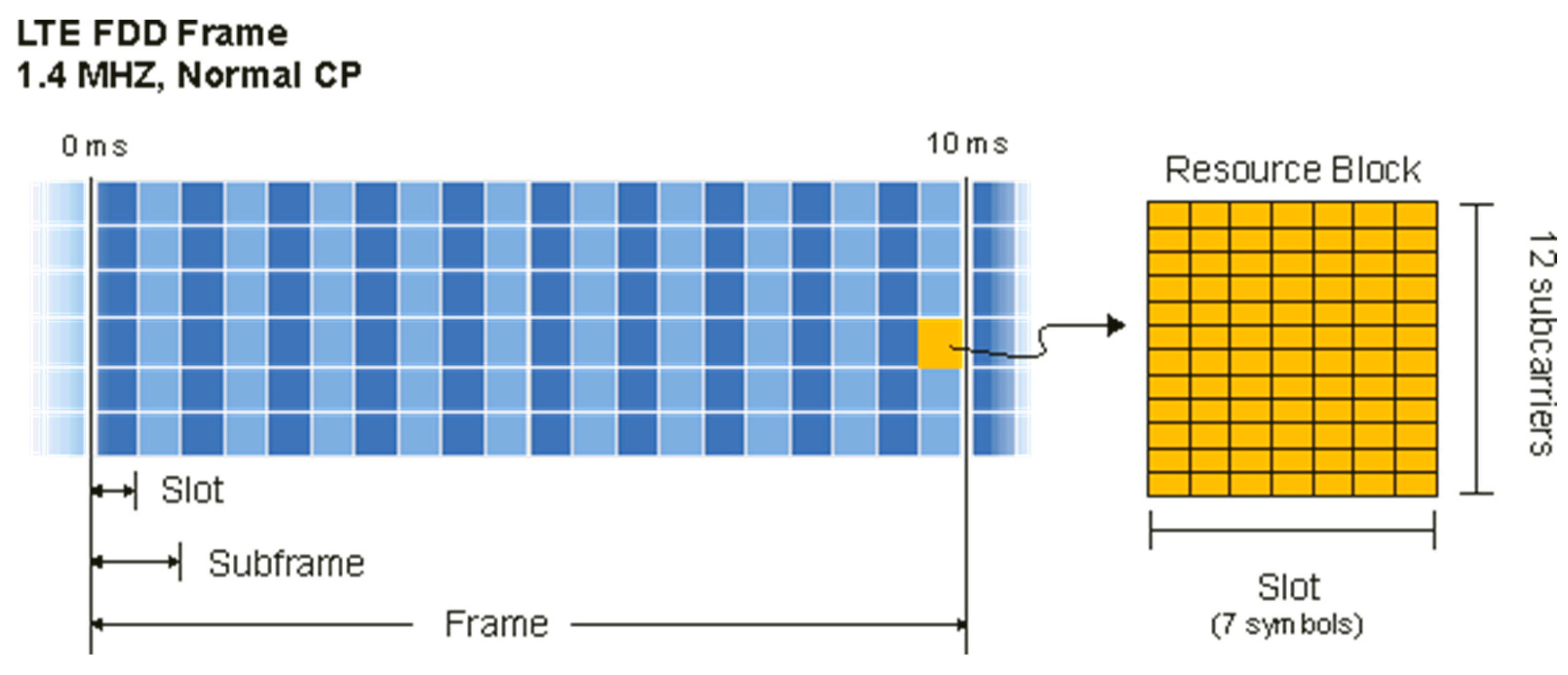
2.1. Physical Layer
2.2. C-V2X Resource Management
3. Proposed Reinforcement Learning Approach for Adaptive Resource Management
3.1. Impact of MCS Index
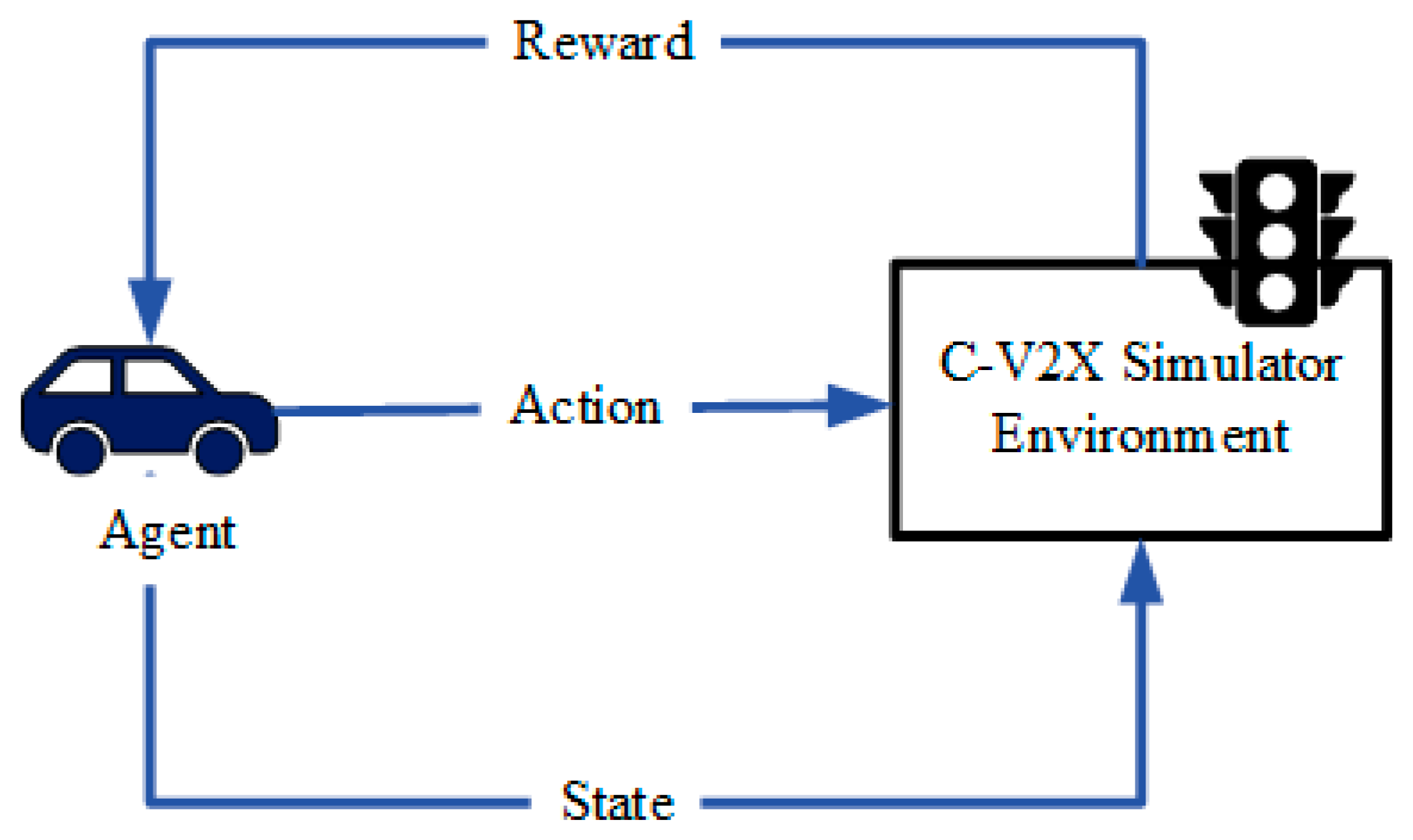
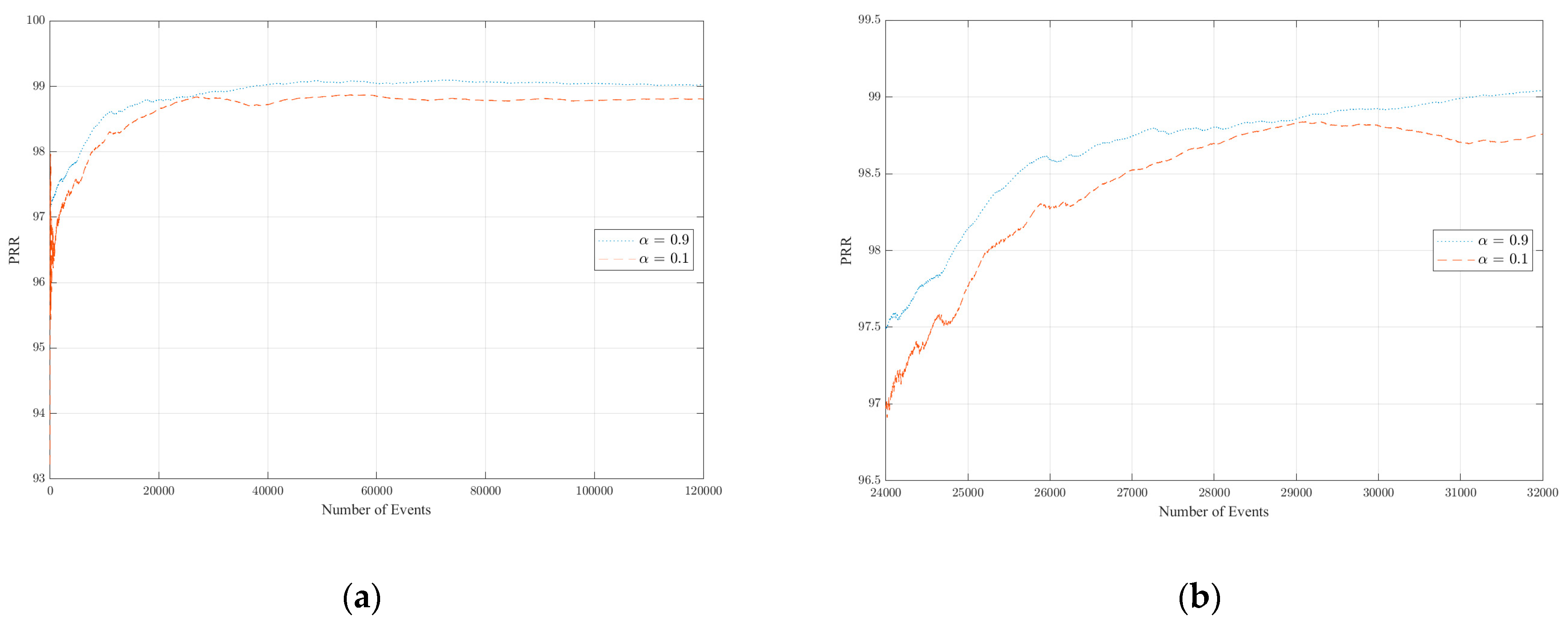
3.2. RL Q-Learning Approach
| Algorithm 1. Pseudocode for proposed RL approach | |
| 1: | Initialize: |
| 2: | initialize |
| 3: | calculate based on |
| 4: | while do |
| 5: | for each: LTE event |
| 6: | calculate the current Q-value based |
| 7: | calculate the current rewards based on Equation (8) |
| 8: | explore the next action that satisfy the condition in Equation (9) |
| 9: | calculate the current value function target based on Equation (6) |
| 10: | calculate the current based on Equation (7) |
| 11: | update the Q-value based on Equation (5) |
| 12: | calculate the new |
| 13: | end while |
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Häfner, B.; Bajpai, V.; Ott, J.; Schmitt, G.A. A Survey on Cooperative Architectures and Maneuvers for Connected and Automated Vehicles. IEEE Commun. Surv. Tutor. 2022, 24, 380–403. [Google Scholar] [CrossRef]
- Varatharaajan, S.; Grossmann, M.; Galdo, G.D. 5G New Radio Physical Downlink Control Channel Reliability Enhancements for Multiple Transmission-Reception-Point Communications. IEEE Access 2022, 10, 97394–97407. [Google Scholar] [CrossRef]
- Sehla, K.; Nguyen, T.M.T.; Pujolle, G.; Velloso, P.B. Resource Allocation Modes in C-V2X: From LTE-V2X to 5G-V2X. IEEE Internet Things J. 2022, 9, 8291–8314. [Google Scholar] [CrossRef]
- Roux, P.; Sesia, S.; Mannoni, V.; Perraud, E. System level analysis for ITS-G5 and LTE-V2X performance comparison. In Proceedings of the 2019 IEEE 16th International Conference on Mobile Ad Hoc and Smart Systems, MASS 2019, Monterey, CA, USA, 4–7 November 2019; pp. 1–9. [Google Scholar]
- Ansari, S.; Alnajjar, K.A. Adaptive Modulation and Coding: A Brief Review of the Literature. Int. J. Commun. Antenna Propag. 2023, 13, 43–54. [Google Scholar] [CrossRef]
- Elwekeil, M.; Wang, T.; Zhang, S. Deep learning based adaptive modulation and coding for uplink multi-user SIMO transmissions in IEEE 802.11ax WLANs. Wirel. Netw. 2021, 27, 5217–5227. [Google Scholar] [CrossRef]
- Oh, J.E.; Jo, A.M.; Jeong, E.R. MCS Selection Based on Convolutional Neural Network in TDD System. Int. J. Electr. Electron. Res. 2023, 11, 485–489. [Google Scholar] [CrossRef]
- Cho, S. Use of Logarithmic Rates in Multi-Armed Bandit-Based Transmission Rate Control Embracing Frame Aggregations in Wireless Networks. Appl. Sci. 2023, 13, 8485. [Google Scholar] [CrossRef]
- Jiang, Q.; Leung, V.C.M.; Tang, H. QoS-Guaranteed Adaptive Modulation and Coding for Wireless Scalable Video Multicast. IEEE Trans Circuits Syst Video Technol 2022, 32, 1696–1700. [Google Scholar] [CrossRef]
- Sanei, F.; Farbeh, H. A link adaptation scheme for reliable downlink communications in narrowband IoT. Microelectron. J. 2021, 114, 105154. [Google Scholar] [CrossRef]
- Karmakar, R.; Kaddoum, G.; Chattopadhyay, S. SmartCon: Deep Probabilistic Learning-Based Intelligent Link-Configuration in Narrowband-IoT Toward 5G and B5G. IEEE Trans. Cogn. Commun. Netw. 2022, 8, 1147–1158. [Google Scholar] [CrossRef]
- Huang, Y.; Thomas Hou, Y.; Lou, W. DELUXE: A DL-Based Link Adaptation for URLLC/eMBB Multiplexing in 5G NR. IEEE J. Sel. Areas Commun. 2022, 40, 143–162. [Google Scholar] [CrossRef]
- Gao, Y.; Yang, H.; Hong, X.; Chen, L. A Hybrid Scheme of MCS Selection and Spectrum Allocation for URLLC Traffic under Delay and Reliability Constraints. Entropy 2022, 24, 727. [Google Scholar] [CrossRef]
- Nayak, S.; Roy, S. Novel Markov Chain Based URLLC Link Adaptation Method for 5G Vehicular Networking. IEEE Trans. Veh. Technol. 2021, 70, 12302–12311. [Google Scholar] [CrossRef]
- Liao, Y.; Yang, Z.; Yin, Z.; Shen, X. DQN-Based Adaptive MCS and SDM for 5G Massive MIMO-OFDM Downlink. IEEE Commun. Lett. 2023, 27, 185–189. [Google Scholar] [CrossRef]
- Radbord, A.; Harsini, J.S. Slow and fast adaptive modulation and coding for uplink massive MIMO systems with packet retransmission. IET Commun. 2022, 16, 915–928. [Google Scholar] [CrossRef]
- Parsa, A.; Moghim, N.; Salavati, P. Joint power allocation and MCS selection for energy-efficient link adaptation: A deep reinforcement learning approach. Comput. Netw. 2022, 218, 109386. [Google Scholar] [CrossRef]
- Geiser, F.; Wessel, D.; Hummert, M.; Weber, A.; Wübben, D.; Dekorsy, A.; Viseras, A. DRLLA: Deep Reinforcement Learning for Link Adaptation. Telecom 2022, 3, 692–705. [Google Scholar] [CrossRef]
- Khan, J.; Jacob, L. Cognitive Sub-Band Scheduling and Link Adaptation for 5G URLLC. IEEE Trans. Cogn. Commun. Netw. 2021, 7, 1280–1290. [Google Scholar] [CrossRef]
- Han, N.; Kim, I.M.; So, J. Lightweight LSTM-Based Adaptive CQI Feedback Scheme for IoT Devices. Sensors 2023, 23, 4929. [Google Scholar] [CrossRef]
- Ye, X.; Yu, Y.; Fu, L. Deep Reinforcement Learning Based Link Adaptation Technique for LTE/NR Systems. IEEE Trans. Veh. Technol. 2023, 72, 7364–7379. [Google Scholar] [CrossRef]
- Burbano-Abril, A.; McCarthy, B.; Lopez-Guerrero, M.; Rangel, V.; O’Driscoll, A. MCS Adaptation within the Cellular V2X Sidelink. In Proceedings of the 2021 IEEE Conference on Standards for Communications and Networking, CSCN 2021, Virtual, 15–17 December 2021; pp. 111–117. [Google Scholar]
- TS 103 574; Intelligent Transport Systems (ITS); Congestion Control Mechanisms for the C-V2X PC5 Interface; Access Layer Part. ETSI, Sophia Antipolis, Cedex: Valbonne, France, 2018. Available online: https://www.etsi.org/deliver/etsi_ts/103500_103599/103574/01.01.01_60/ts_103574v010101p.pdf (accessed on 13 October 2023).
- Molina-Masegosa, R.; Gozalvez, J. LTE-V for Sidelink 5G V2X Vehicular Communications: A New 5G Technology for Short-Range Vehicle-to-Everything Communications. IEEE Veh. Technol. Mag. 2017, 12, 30–39. [Google Scholar] [CrossRef]
- Mansouri, A.; Martinez, V.; Härri, J. A First Investigation of Congestion Control for LTE-V2X Mode 4. In Proceedings of the 2019 15th Annual Conference on Wireless On-demand Network Systems and Services (WONS), Wengen, Switzerland, 22–24 January 2019; pp. 56–63. [Google Scholar]
- Bazzi, A. Congestion Control Mechanisms in IEEE 802.11p and Sidelink C-V2X. In Proceedings of the 2019 53rd Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 3–6 November 2019; pp. 1125–1130. [Google Scholar]
- Bazzi, A.; Zanella, A.; Masini, B.M. Optimizing the Resource Allocation of Periodic Messages with Different Sizes in LTE-V2V. IEEE Access 2019, 7, 43820–43830. [Google Scholar] [CrossRef]
- Molina-Masegosa, R.; Gozalvez, J.; Sepulcre, M. Comparison of IEEE 802.11p and LTE-V2X: An Evaluation with Periodic and Aperiodic Messages of Constant and Variable Size. IEEE Access 2020, 8, 121526–121548. [Google Scholar] [CrossRef]
- Yao, Y.; Zhou, X.; Zhang, K. Density-Aware Rate Adaptation for Vehicle Safety Communications in the Highway Environment. IEEE Commun. Lett. 2014, 18, 1167–1170. [Google Scholar] [CrossRef]
- Haque, K.F.; Abdelgawad, A.; Yanambaka, V.P.; Yelamarthi, K. Lora architecture for v2x communication: An experimental evaluation with vehicles on the move. Sensors 2020, 20, 6876. [Google Scholar] [CrossRef]
- Camp, J.; Knightly, E. Modulation Rate Adaptation in Urban and Vehicular Environments: Cross-Layer Implementation and Experimental Evaluation. IEEE/ACM Trans. Netw. 2010, 18, 1949–1962. [Google Scholar] [CrossRef]
- LTE Physical Layer Overview. Available online: https://rfmw.em.keysight.com/wireless/helpfiles/89600b/webhelp/subsystems/lte/content/lte_overview.htm (accessed on 28 August 2023).
- Rumney, M. LTE and the Evolution to 4G Wireless: Design and Measurement Challenges, 2nd ed.; John Wiley & Sons Limited: West Sussex, UK, 2013. [Google Scholar]
- TS 36.213 V14.3.0; 3rd Generation Partnership Project; Specification Group Radio Access Network; Evolved Universal Terrestrial Radio Access (E-UTRA); Physical Layer Procedures (Release 14). 3GPP, Sophia Antipolis: Valbonne, France, 2017.
- Steer, M. Microwave and RF Design Radio Systems; NC State University: Raleigh, NC, USA, 2019. [Google Scholar]
- Cecchini, G.; Bazzi, A.; Masini, B.M.; Zanella, A. LTEV2Vsim: An LTE-V2V Simulator for the Investigation of Resource Allocation for Cooperative Awareness. In Proceedings of the 5th IEEE International Conference on Models and Technologies for Intelligent Transportation Systems, Napoli, Italy, 26–28 June 2017; pp. 80–85. [Google Scholar]
- Zhou, X. Optimal Values Selection of Q-learning Parameters in Stochastic Mazes. J. Phys. Conf. Ser. 2022, 2386, 012037. [Google Scholar] [CrossRef]
- Abanto-Leon, L.F.; Koppelaar, A.; de Groot, S.H. Enhanced C-V2X Mode-4 Subchannel Selection. In Proceedings of the 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL, USA, 27–30 August 2018; pp. 1–5. [Google Scholar]
- Kang, B.; Jung, S.; Bahk, S. Sensing-Based Power Adaptation for Cellular V2X Mode 4. In Proceedings of the 2018 IEEE International Symposium on Dynamic Spectrum Access Networks (DySPAN), Seoul, Republic of Korea, 22–25 October 2018; pp. 1–4. [Google Scholar]
- Campolo, C.; Molinaro, A.; Romeo, F.; Bazzi, A.; Berthet, A.O. Full duplex-aided sensing and scheduling in cellular-V2X mode 4. In Proceedings of the International Symposium on Mobile Ad Hoc Networking and Computing (MobiHoc), Catania, Italy, 2–5 July 2019; pp. 19–24. [Google Scholar]
- Haider, A.; Hwang, S.H. Adaptive Transmit Power Control Algorithm for Sensing-Based Semi-Persistent Scheduling in C-V2X Mode 4 Communication. Electronics 2019, 8, 846. [Google Scholar] [CrossRef]
- Yoon, Y.; Kim, H. Resolving persistent packet collisions through broadcast feedback in cellular V2X communication. Future Internet 2021, 13, 211. [Google Scholar] [CrossRef]
- Yang, J.M.; Yoon, H.; Hwang, S.; Bahk, S. PRESS: Predictive Assessment of Resource Usage for C-V2V Mode 4. In Proceedings of the 2021 IEEE Wireless Communications and Networking Conference (WCNC), Nanjing, China, 29 March–1 April 2021; pp. 1–6. [Google Scholar]
- Hirai, T.; Wakamiya, N.; Murase, T. NOMA-dependent Low-Powered Retransmission in Sensing-based SPS for Cellular-V2X Mode 4. In Proceedings of the IEEE Vehicular Technology Conference, London, UK, 26–29 September 2022. [Google Scholar]
- Yin, J.C.; Hwang, S.H. Variable MCS method for LTE V2V Mode4. In Proceedings of the 2021 International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Republic of Korea, 20–22 October 2021; pp. 1368–1370. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Simulation time () | 60 s |
| Vehicle position update time () | 0.1 s |
| Vehicle’s speed | 120 km/h |
| Vehicle’s speed standard deviation | 40 km/h |
| Road length | 1000 m |
| Number of lanes | 1 per directions |
| Total number of vehicles () | 100 vehicles, 200 vehicles |
| Channel bandwidth () | 10 Mhz |
| Transmission power () | 23 dBm |
| Beacon size | 190 Bytes |
| Sensing interval | 0.1 s |
| Modulation Coding Scheme (MCS) | 0~28 |
| Probability resource keep () | 0.8 |
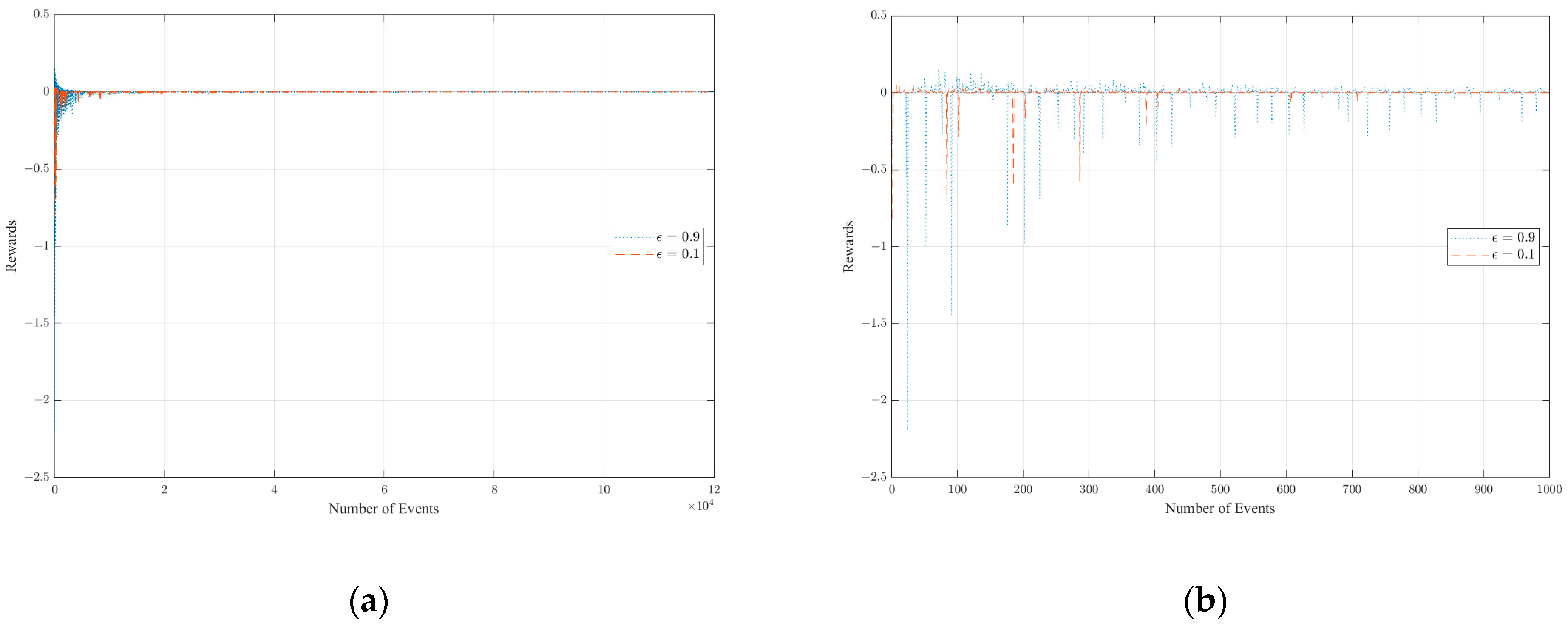
| Q-learning predefined epsilon () | 0.1, 0.9 |
| Q-learning discount factor () | 0.1 |
| Q-learning learning rate () | 0.1, 0.9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bayu, T.I.; Huang, Y.-F.; Chen, J.-K. Reinforcement Learning Approach for Adaptive C-V2X Resource Management. Future Internet 2023, 15, 339. https://doi.org/10.3390/fi15100339
Bayu TI, Huang Y-F, Chen J-K. Reinforcement Learning Approach for Adaptive C-V2X Resource Management. Future Internet. 2023; 15(10):339. https://doi.org/10.3390/fi15100339
Chicago/Turabian StyleBayu, Teguh Indra, Yung-Fa Huang, and Jeang-Kuo Chen. 2023. "Reinforcement Learning Approach for Adaptive C-V2X Resource Management" Future Internet 15, no. 10: 339. https://doi.org/10.3390/fi15100339
APA StyleBayu, T. I., Huang, Y.-F., & Chen, J.-K. (2023). Reinforcement Learning Approach for Adaptive C-V2X Resource Management. Future Internet, 15(10), 339. https://doi.org/10.3390/fi15100339