
Review on Semantic Modeling and Simulation of Cybersecurity and Interoperability on the Internet of Underwater Things




Abstract
1. Introduction
2. Background
2.1. UUVs and Swarms
2.2. Swarm Simulation
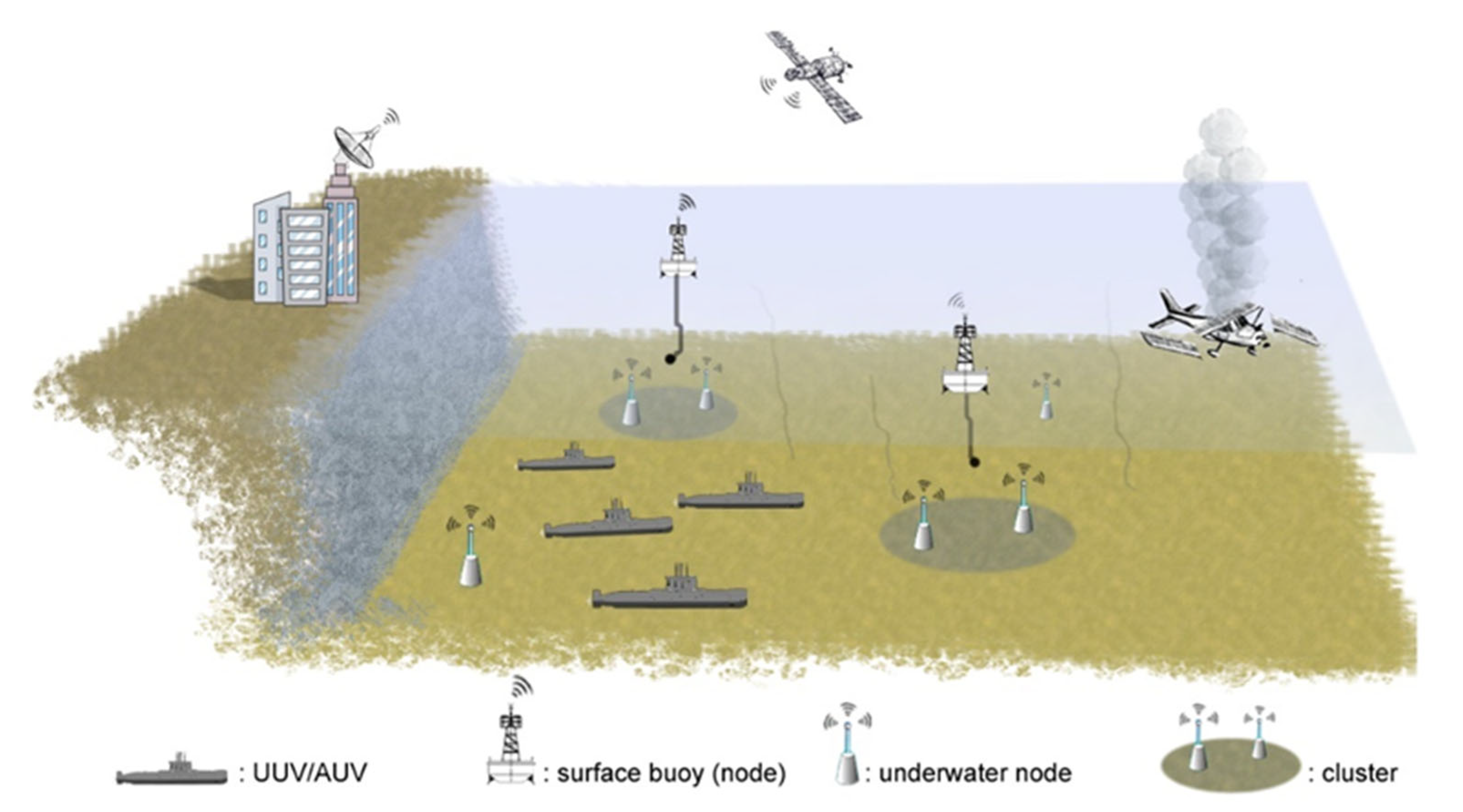
2.3. Internet of Underwater Things (IoUT)
2.4. Semantic Modeling in IoUT
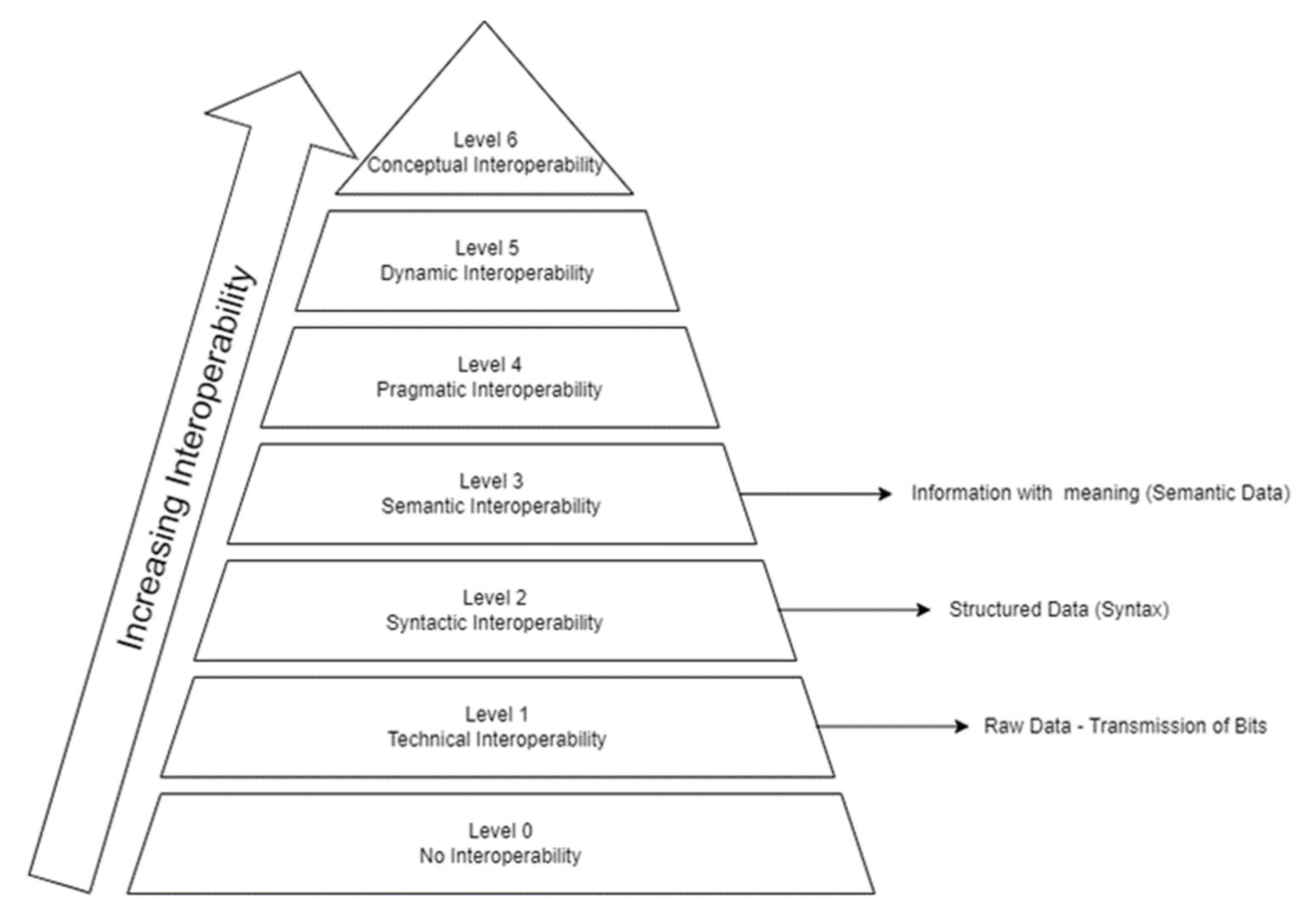
2.5. Interoperability in IoUT
2.5.1. Technical Interoperability
- Device Interoperability
- Network Interoperability
- Platform Interoperability
2.5.2. Syntactic Interoperability
2.5.3. Semantic Interoperability
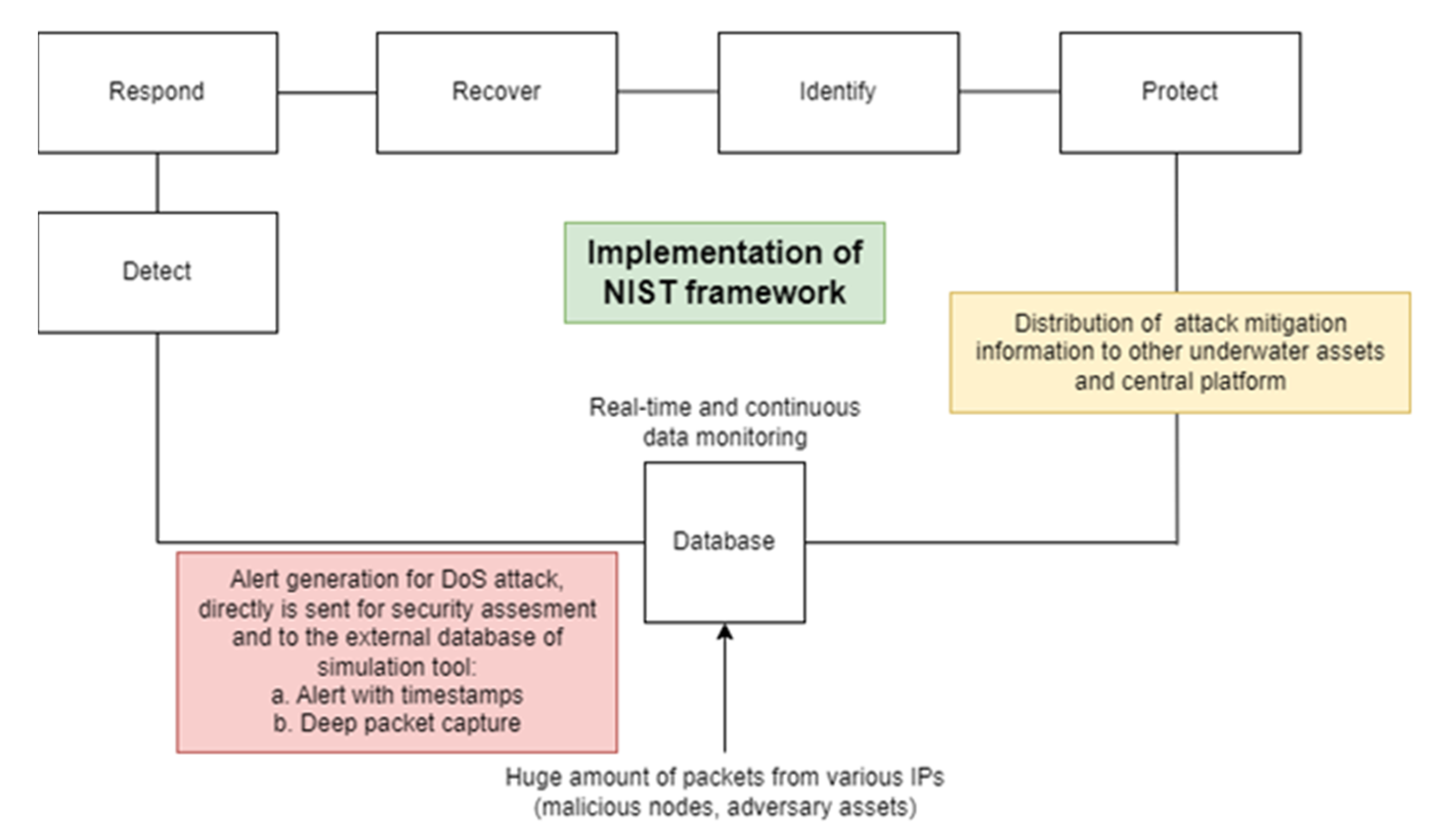
2.6. Cybersecurity in IoUT
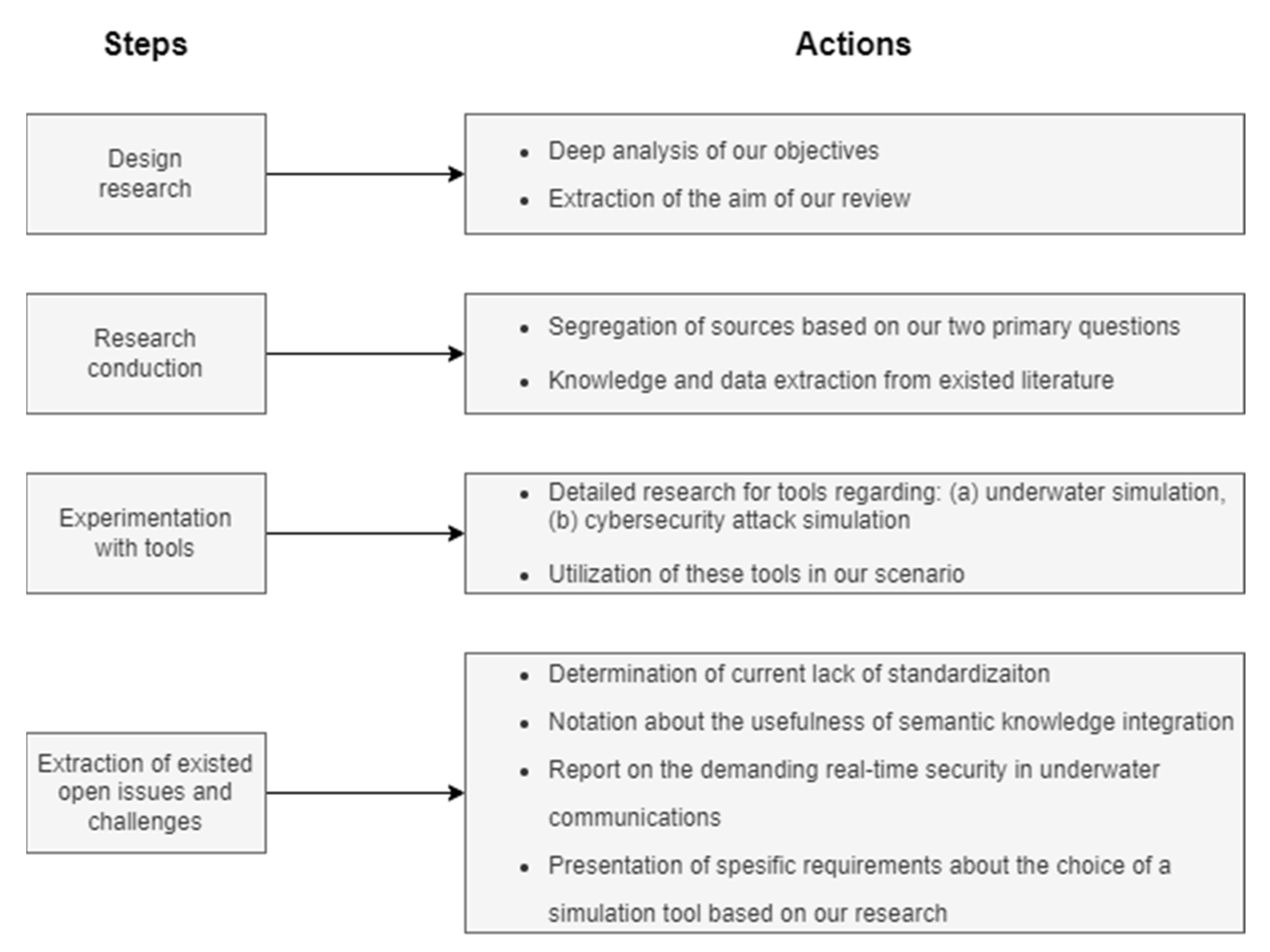
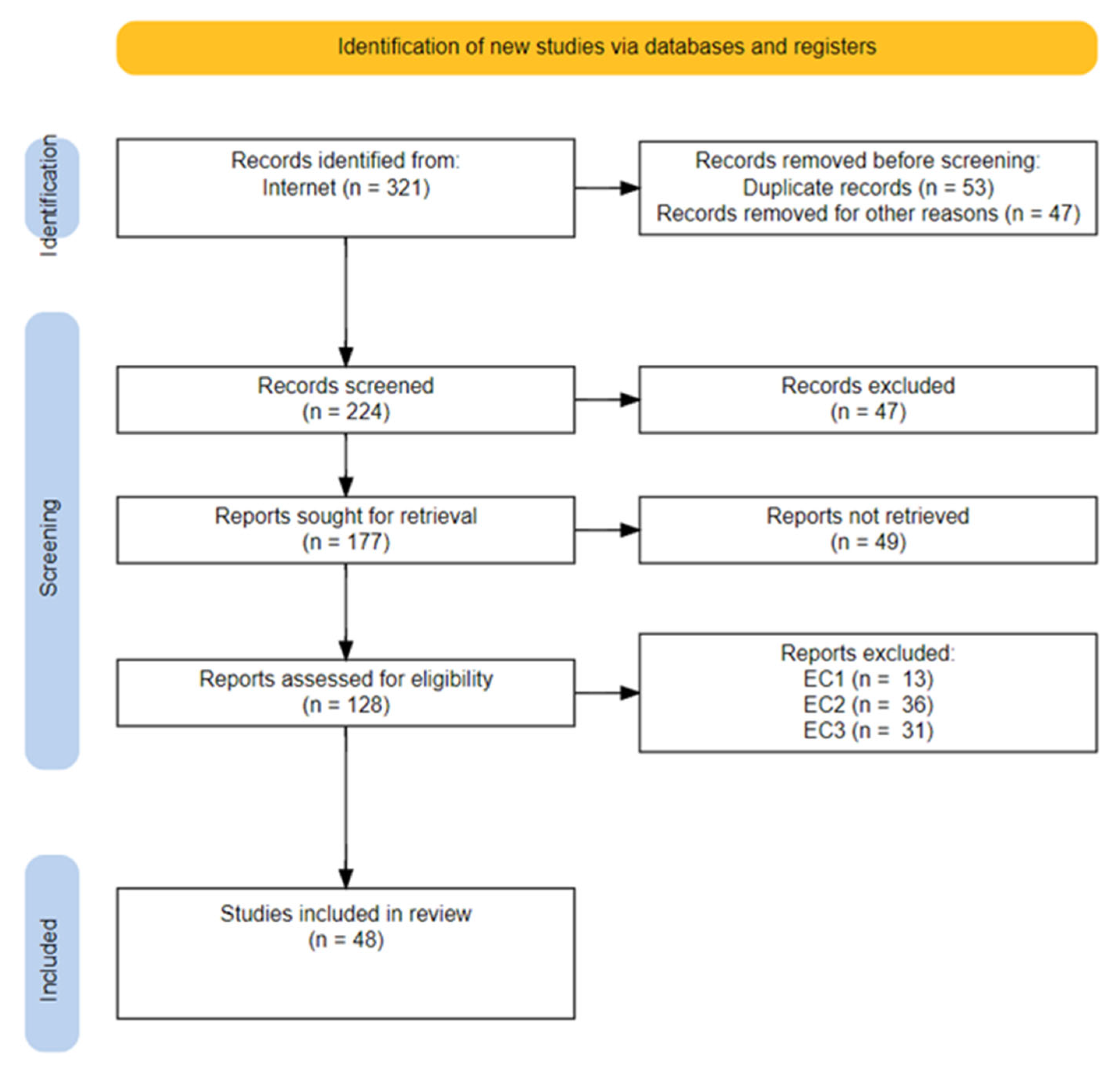
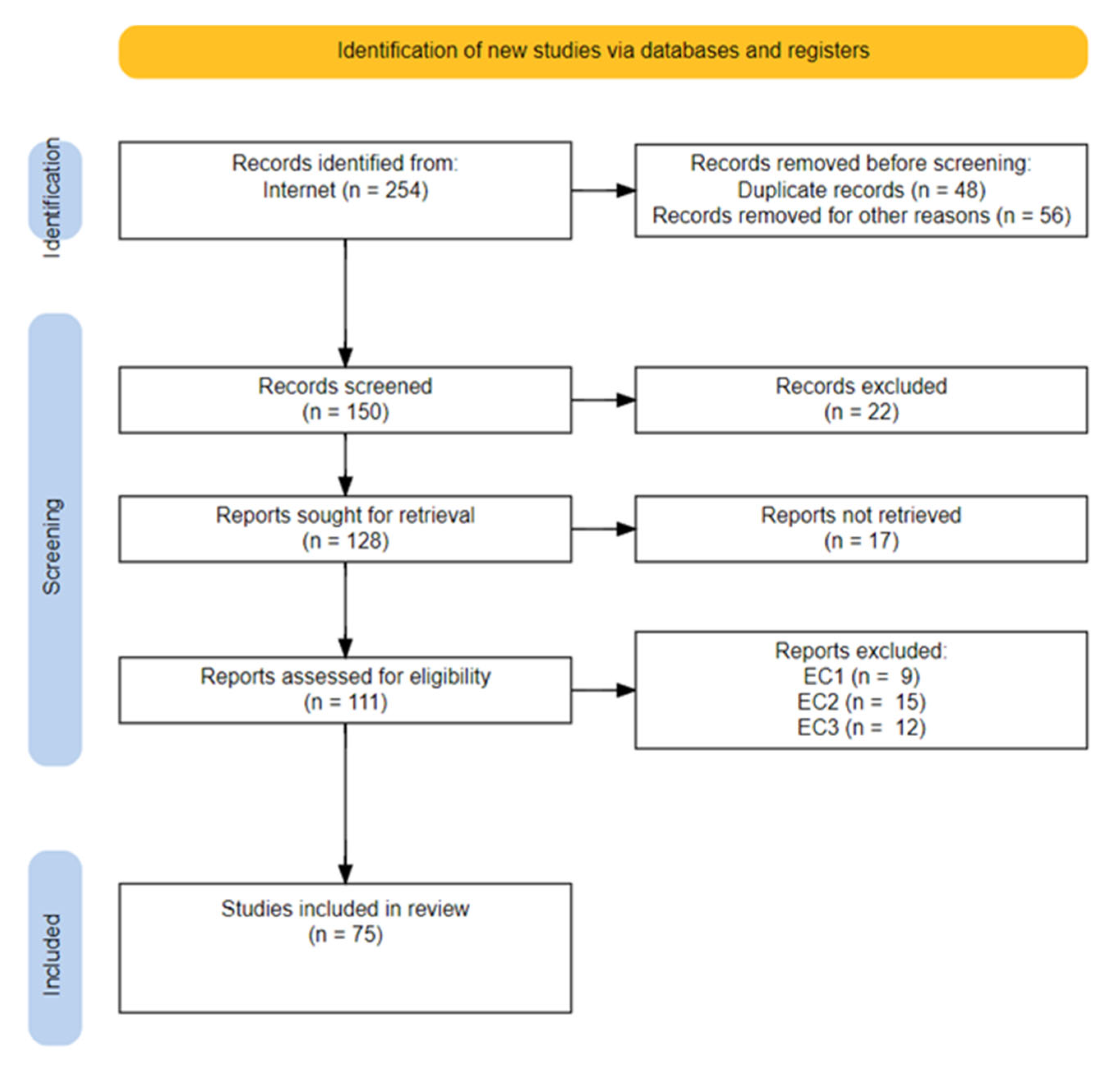
3. Research Methodology
- 3.
- How can related research problems be overcome using new technologies, such as the technology of digital twins?
- internet of underwater things
- semantic modeling
- ontology
- open source
- simulation tools
- underwater network
- underwater environment and communication
- wireless communication
- unmanned underwater vehicle
- autonomous underwater vehicle
- swarm
- interoperability
- cybersecurity
- cyber threats
- risk assessment
- threat and vulnerability modeling
- search-and-rescue operation
- communication standardization
- digital twins
- Inclusion Criteria
- Exclusion Criteria
4. Results: State-of-the-Art Approaches
4.1. Semantic Modeling in IoUT
4.1.1. Semantic Modeling and Interoperability
4.1.2. Semantic Modeling and Cybersecurity
4.1.3. Data and Information Modeling for UUVs
4.2. Cybersecurity in IoUT
4.3. Simulation of Cybersecurity and Interoperability in IoUT
5. Discussing Open Issues and Challenges
6. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Abbreviation | Definition | Abbreviation | Definition |
| ACO | Ant Colony Optimizaiton | IoUT | Internet of Underwater Things |
| AD | Active Directory | ISO | International Organization for Standardization |
| AML | AUV Motion and Localization | LSS | Large Scale Service |
| AoA | Angle of Arrival | MARL | Multi-Agent Reinforcement Learning |
| ARP | Address Resolution Protocol | MEBN | Multi-Entity Bayesian Network |
| ATT&CK | Adversarial Tactics, Techniques, and Common Knowledge | NATO | North Atlantic Treaty Organization |
| AUV | Autonomous Underwater Vehicle | NeOn | Networked Ontologies |
| AVIG | Adaprive Visual Information | NeSSi | Network Security Simulator |
| C2 | Command and Control | NIST | National Institute of Standards and Technology |
| CA | Climate Analysis | NOAA | National Oceanic and Atmospheric Administration’s National Weather Service |
| CCE | Common Configuration Enumeration | NS | Network Simulator |
| CDO | Climate Data Online | NUWCDIVNPT | Naval Undersea Warfare Center Division Newport |
| CIA | Confidentiality, Integrity, Availability | OSI | Open Systems Interconnection |
| CMRE | Center for Maritime Research and Experimentation | OSP | Open Simulation Platform |
| CNN | Convolutional Neural Network | OWASP | Open Web Application Security Project |
| CPHA | Cyber Preliminary Hazard Analysis | OWC | optical wireless communication |
| CVE | Common Vulnerabilities and Exposure | OWL | Web Ontology Language |
| CVO | Cybersecurity Vulnerability Ontology | OWO | Open World Ontology |
| DBR | Depth-Based Routing protocol | PSO | Particle Swarm Optimization |
| DBSR | Depth-Based Secure Routing protocol | RDF | Resource Description Framework |
| DCO | Dynamic Cybersecurity Ontology | RDFS | Resource Description Framework Schema |
| DDoS | Distributed Denial of Service | ROS | Robot Operating System |
| DKOE | Data Knowledge and Operational Effectiveness | ROV | Remotely Operated Vehicle |
| DoS | Denial of Service | SAR | Search-and-Rescue |
| DUNE | Distributed Unified Navigation Environment | SDN | Software Defined Network |
| ECC | Elliptic-Curve Cryptography | SLAM | Simultaneous Localization And Mapping |
| ENISA | European Network and Information Security Agency | SOA | Service Oriented Architecture |
| EVA | Efficient Void Aware | SPARQL | SPARQL Protocol and RDF Query Language |
| EVE-NG | Emulated Virtual Environment Next Generation | SSC | Software to Software |
| FSA | Formal Safety Assessment | SSN | Semantic Sensor Network |
| FTP | File Transfer Protocol | STANAG | Standardization Agreement |
| GEBCO | General Bathymetric Chart of the Oceans | STIX | Structured Threat Information eXpression |
| GloMoSim | Global Mobile Information System Simulator | STO | Science and Technology Organization |
| GNS | Graphic Network Simulator | SWRL | Semantic Web Rule Language |
| GUI | Graphical User Interface | ToA | Time of Arrival |
| HTTP | Hypertext Transfer Protocol | UCO | Unified Cybersecurity Ontology |
| HTTPS | Hypertext Transfer Protocol Secure | USV | Unmanned Surface Vehicle |
| ICT | Information and Communication Technologies | UUV | Unmanned Underwater Vehicle |
| IDA | intelligent data analytics | UWAN | Underwater Wireless Acoustic Network |
| IDS | Intrusion Detection System | UWCN | Underwater Wireless Communication Network |
| IoC | Indicator of Compromise | UWSN | Underwater Wireless Sensor Network |
| IoE | Internet of Everything | W3C | World Wide Web Consortium |
| IoTSEC | Internet of Things Security | WASC | Web Application Security Consortium |
References
- Eca Group. News & Stories. Available online: https://www.ecagroup.com/en/news-stories (accessed on 3 October 2022).
- France, B. Interim Report n°3 on the Accident on 1st June 2009 to the Airbus A330-203 Registered F-GZCP Operated by Air France Flight AF 447 Rio de Janeiro—Paris; BEA Bureau of Enquiry and Analysis for Civil Aviation Safety: Le Bourget, France, 2011. [Google Scholar]
- Armed and Intelligent—Global Defence Technology. Issue 91. 2018. Available online: https://defence.nridigital.com/global_defence_technology_sep18/issue_91 (accessed on 4 October 2022).
- The Four V’s of Big Data—Enterprise Big Data Framework©. Available online: https://www.bigdataframework.org/the-four-vs-of-big-data/ (accessed on 4 October 2022).
- Liu, F.; Tang, H.; Qin, Y.; Duan, C.; Luo, J.; Pu, H. Review on Fault Diagnosis of Unmanned Underwater Vehicles. Ocean. Eng. 2022, 243, 110290. [Google Scholar] [CrossRef]
- Hernandez Corbato, C.; Milosevic, Z.; Olivares, C.; Rodriguez, G.; Rossi, C. Meta-control and self-awareness for the UX-1 autonomous underwater robot. In Advances in Intelligent Systems and Computing; Springer: Berlin/Heidelberg, Germany, 2020; Volume 1092, pp. 404–415. [Google Scholar]
- The UX-1 Robot. Available online: https://www.unexmin.eu/the-project/the-ux-1-robot (accessed on 4 October 2022).
- Chandrasekhar, V.; Seah, W.K.; Choo, Y.S.; Ee, V. Localization in underwater sensor networks-survey and challenges. In Proceedings of the 1st Workshop on Underwater Networks, WUWNET 2006, Los Angeles, CA, USA, 25 September 2007. [Google Scholar]
- Costanzi, R.; Fenucci, D.; Manzari, V.; Micheli, M.; Morlando, L.; Natale, D.; Stifani, M.; Tesei, A.; Caiti, A. At-Sea NATO Operational Experimentation with Interoperable Underwater Assets Using Different Robotic Middlewares; IOS Press: Amsterdam, The Netherlands, 2018. [Google Scholar]
- CMRE_AR_2021M. Available online: https://www.cmre.nato.int/research/publications/other-publications/1653-cmre-ar-2021m (accessed on 20 November 2022).
- Yan, Z.; Wu, Y.; Du, X.; Li, J. Limited Communication Consensus Control of Leader-Following Multi-UUVs in a Swarm System under Multi-Independent Switching Topologies and Time Delay. IEEE Access 2018, 6, 33183–33200. [Google Scholar] [CrossRef]
- Petritoli, E.; Cagnetti, M.; Leccese, F. Simulation of Autonomous Underwater Vehicles (AUVs) Swarm Diffusion. Sensors 2020, 20, 4950. [Google Scholar] [CrossRef] [PubMed]
- Hu, Z.; Wang, Z.; Yin, Y. Research on 3D global path planning technology for UUV based on fusion algorithm. J. Phys. Conf. Ser. 2021, 1871, 012128. [Google Scholar] [CrossRef]
- Gazis, A. What Is IoT? The Internet of Things Explained. Acad. Lett. 2021, 1003, 1–8. [Google Scholar] [CrossRef]
- Menaka, D.; Gauni, S.; Manimegalai, C.T.; Kalimuthu, K. Vision of IoUT: Advances and Future Trends in Optical Wireless Communication. J. Opt. 2020, 49, 494–509. [Google Scholar] [CrossRef]
- Fattah, S.; Gani, A.; Ahmedy, I.; Idris, M.Y.I.; Hashem, I.A.T. A Survey on Underwater Wireless Sensor Networks: Requirements, Taxonomy, Recent Advances, and Open Research Challenges. Sensors 2020, 20, 5393. [Google Scholar] [CrossRef]
- Domingo, M.C. An Overview of the Internet of Underwater Things. J. Netw. Comput. Appl. 2012, 35, 1879–1890. [Google Scholar] [CrossRef]
- Yisa, A.G.; Dargahi, T.; Belguith, S.; Hammoudeh, M. Security Challenges of Internet of Underwater Things: A Systematic Literature Review. Trans. Emerg. Telecommun. Technol. 2021, 32, e4203. [Google Scholar] [CrossRef]
- Mary, D.R.K.; Ko, E.; Kim, S.G.; Yum, S.H.; Shin, S.Y.; Park, S.H. A Systematic Review on Recent Trends, Challenges, Privacy and Security Issues of Underwater Internet of Things. Sensors 2021, 21, 8262. [Google Scholar] [CrossRef]
- Arul, R.; Alroobaea, R.; Mechti, S.; Rubaiee, S.; Andejany, M.; Tariq, U.; Iftikhar, S. Intelligent Data Analytics in Energy Optimization for the Internet of Underwater Things. Soft Comput. 2021, 25, 12507–12519. [Google Scholar] [CrossRef]
- Li, J.; Wu, J.; Li, C.; Yang, W.; Bashir, A.K.; Li, J.; Al-Otaibi, Y.D. Information-Centric Wireless Sensor Networking Scheme with Water-Depth-Awareness Content Caching for Underwater IoT. IEEE Internet Things J. 2022, 9, 858–867. [Google Scholar] [CrossRef]
- Allen, R.B. Definitions and Semantic Simulations Based on Object-Oriented Analysis and Modeling. arXiv 2019, arXiv:1912.13186. [Google Scholar]
- (PDF) NeOn Methodology for Building Ontology Networks: A Scenario-Based Methodology. Available online: https://www.researchgate.net/publication/49911337_NeOn_Methodology_for_Building_Ontology_Networks_a_Scenario-based_Methodology (accessed on 4 October 2022).
- Wikipedia Semantic Reasoner. 2015. Available online: https://en.wikipedia.org/wiki/Semantic_reasoner (accessed on 20 November 2022).
- Li, X.; Martínez, J.F.; Rubio, G. Towards a Hybrid Approach to Context Reasoning for Underwater Robots. Appl. Sci. 2017, 7, 183. [Google Scholar] [CrossRef]
- European Commission. Smart and Networking UnderWAter Robots in Cooperation Meshes. SWARMs Project. Fact Sheet. H2020. CORDIS. Available online: https://cordis.europa.eu/project/id/662107 (accessed on 4 October 2022).
- Liu, X.; Wang, J.; Li, W. A Formal Definition on Ontology Integration. IET Conf. Publ. 2012, 2012, 66–68. [Google Scholar] [CrossRef]
- Lane, D.; Brown, K.; Petillot, Y.; Miguelanez, E.; Patron, P. An Ontology-Based Approach to Fault Tolerant Mission Execution for Autonomous Platforms. Mar. Robot. Auton. 2013, 9781461456599, 225–255. [Google Scholar] [CrossRef]
- Std 610.12-1990(R2002); IEEE Standard Glossary of Software Engineering Terminology. The Institute of Electrical and Electronics Engineers: New York, NY, USA, 1990; pp. 1–88.
- Wang, W.; Tolk, A.; Wang, W. The levels of conceptual interoperability model: Applying systems engineering principles to M&S. In Proceedings of the 2009 Spring Simulation Multiconference, San Diego, CA, USA, 22 March 2009. [Google Scholar]
- Kotis, K.I.; Pliatsios, A.; Goumopoulos, C.; Kotis, K. A Review on IoT Frameworks Supporting Multi-Level Interoperability-The Semantic Social Network of Things Framework. Int. J. Adv. Internet Technol. 2020, 13, 46–64. [Google Scholar]
- Braga, J.; Martins, R.; Petrioli, C.; Petroccia, R.; Picari, L. Cooperation and networking in an underwater network composed by heterogeneous assets. In Proceedings of the OCEANS 2016 MTS/IEEE Monterey, OCE 2016, Monterey, CA, USA, 19–23 September 2016; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2016. [Google Scholar]
- Gazis, V.; Goertz, M.; Huber, M.; Leonardi, A.; Mathioudakis, K.; Wiesmaier, A.; Zeiger, F. Short Paper: IoT: Challenges, projects, architectures. In Proceedings of the 2015 18th International Conference on Intelligence in Next Generation Networks, ICIN 2015; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2015; pp. 145–147. [Google Scholar]
- Noura, M.; Atiquzzaman, M.; Gaedke, M. Interoperability in Internet of Things: Taxonomies and Open Challenges. Mob. Netw. Appl. 2019, 24, 796–809. [Google Scholar] [CrossRef]
- Lepage, K.D.; Goldhahn, R.; Alves, J.; Strode, C.; Braca, P.; Ferri, G.; Munafo, A.; Oddone, M.; Sildam, J.; Baralli, F.; et al. Autonomous networked anti-submarine warfare research and development at CMRE. In Proceedings of the MTS/IEEE OCEANS 2015—Genova: Discovering Sustainable Ocean Energy for a New World, Genova, Italy, 18–21 May 2015. [Google Scholar] [CrossRef]
- Alves, J.; Furfaro, T.; Lepage, K.; Munafò, A.; Pelekanakis, K.; Petroccia, R.; Zappa, G. Moving JANUS Forward: A Look into the Future of Underwater Communications Interoperability; The Centre for Maritime Research and Experimentation (CMRE): La Spezia, Italy, 2017. [Google Scholar]
- Potter, J.; Alves, J.; Green, D.; Zappa, G.; Nissen, I.; McCoy, K. The JANUS underwater communications standard. In Proceedings of the 2014 Underwater Communications and Networking, UComms 2014, Sestri Levante, Italy, 3–5 September 2014; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2014. [Google Scholar]
- NATO—News: A New Era of Digital Underwater Communications, 27 April 2017. Available online: https://www.nato.int/cps/en/natohq/news_143247.htm (accessed on 4 October 2022).
- Baghdady, J.; Incze, M.; Dias, P.; Lima, K.; Trimble, A.Z.; Hafner, N.; Andrade, R.; Costa, M.; Ribeiro, M.; Sousa, J.; et al. Enabling interoperability among disparate unmanned vehicles via coordinated command, control, and communications strategies. In Proceedings of the 2020 Global Oceans 2020: Singapore—U.S. Gulf Coast, Biloxi, MS, USA, 5–30 October 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020. [Google Scholar]
- Semantic Interoperability—Wikipedia. Available online: https://en.wikipedia.org/wiki/Semantic_interoperability (accessed on 4 October 2022).
- Lakka, E.; Petroulakis, N.E.; Hatzivasilis, G.; Soultatos, O.; Michalodimitrakis, M.; Rak, U.; Waledzik, K.; Anicic, D.; Kulkarni, V. End-to-End Semantic Interoperability Mechanisms for IoT. In Proceedings of the 2019 IEEE 24th International Workshop on Computer Aided Modeling and Design of Communication Links and Networks (CAMAD), Limassol, Cyprus, 11–13 September 2019; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2019. [Google Scholar]
- Khasawneh, A.M.; Altalhi, M.; Kumar, A.; Aggarwal, G.; Kaiwartya, O.; Khalifeh, A.; Al-Khasawneh, M.A.; Alarood, A.A. An Efficient Void Aware Framework for Enabling Internet of Underwater Things. J. Mar. Sci. Eng. 2021, 9, 1219. [Google Scholar] [CrossRef]
- LinkedIn. Top Trending Technology Domains of the Decade. Available online: https://www.linkedin.com/pulse/top-trending-technology-domains-decade-vignesh-pillai/ (accessed on 18 November 2022).
- Kalloniatis, C.; Kavroudakis, D.; Polidoropoulou, A.; Gritzalis, S. Designing Privacy-Aware Intelligent Transport Systems: A Roadmap for Identifying the Major Privacy Concepts. Int. J. Appl. Geospat. Res. 2019, 10, 73–91. [Google Scholar] [CrossRef]
- North Atlantic Treaty Organisation NATO. NMIOTC 3000 NSC-74/ser.: NU 120. In Proceedings of the 3rd NMIOTC Cyber Security Conference—‘Food for Thought’, Souda Bay, Chania, Greece, 2 August 2019. Available online: https://nmiotc.nato.int/wp-content/uploads/2020/01/3000-NSC-74_NU120_02-08-19_NMIOTC-2019-cyber-security-FFT-Paper.pdf (accessed on 20 November 2022).
- The Five Biggest Cyber Security Trends in 2022. Bernard Marr. Available online: https://bernardmarr.com/the-five-biggest-cyber-security-trends-in-2022/ (accessed on 4 October 2022).
- Cost of a Data Breach 2022. IBM. Available online: https://www.ibm.com/reports/data-breach (accessed on 4 October 2022).
- ENISA Threat Landscape 2021—ENISA. Available online: https://www.enisa.europa.eu/publications/enisa-threat-landscape-2021 (accessed on 4 October 2022).
- AIDA Project. Available online: https://www.project-aida.eu/ (accessed on 4 October 2022).
- Mozzaquatro, B.A.; Agostinho, C.; Goncalves, D.; Martins, J.; Jardim-Goncalves, R. An Ontology-Based Cybersecurity Framework for the Internet of Things. Sensors 2018, 18, 3053. [Google Scholar] [CrossRef] [PubMed]
- Jacq, O.; Laso, P.M.; Brosset, D.; Simonin, J.; Kermarrec, Y.; Giraud, M.-A. Maritime Cyber Situational Awareness Elaboration for Unmanned Vehicles; HAL: Lyon, France, 2019. [Google Scholar]
- Pantazopoulos, P.; Haddad, S.; Lambrinoudakis, C.; Kalloniatis, C.; Maliatsos, K.; Kanatas, A.; Varadi, A.; Gay, M.; Amditis, A. Towards a security assurance framework for connected vehicles. In Proceedings of the 19th IEEE International Symposium on a World of Wireless, Mobile and Multimedia Networks, WoWMoM 2018, Chania, Greece, 12–15 June 2018; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2018. [Google Scholar]
- International Maritime Organization. Revised Guidelines for Formal Safety Assessment (FSA) for Use in the IMO Rule-Making Process; International Maritime Organization: London, UK, 2018. [Google Scholar]
- White Paper Excerpt: Leveraging ISA 62443-3-2 For IACS Risk Assessment and Risk Related Strategies. Available online: https://gca.isa.org/blog/white-paper-excerpt-leveraging-isa-62443-3-2-for-iacs-risk-assessment-and-risk-related-strategies (accessed on 7 October 2022).
- Network Sniffing—Attackics. Available online: https://collaborate.mitre.org/attackics/index.php/Technique/T0842 (accessed on 8 October 2022).
- Signori, A.; Chiariotti, F.; Campagnaro, F.; Zorzi, M. A Game-Theoretic and Experimental Analysis of Energy-Depleting Underwater Jamming Attacks. IEEE Internet Things J. 2020, 7, 9793–9804. [Google Scholar] [CrossRef]
- Azadeh, A.; Shirkouhi, S.N.; Rezaie, K. A Robust Decision-Making Methodology for Evaluation and Selection of Simulation Software Package. Int. J. Adv. Manuf. Technol. 2010, 47, 381–393. [Google Scholar] [CrossRef]
- Global Cyber Alliance. Cybersecurity Toolkit Tool Selection Process Overview; Global Cyber Alliance: London, UK, 2020. [Google Scholar]
- Migueláñez, E.; Patrón, P.; Brown, K.E.; Petillot, Y.R.; Lane, D.M. Semantic Knowledge-Based Framework to Improve the Situation Awareness of Autonomous Underwater Vehicles. IEEE Trans. Knowl. Data Eng. 2011, 23, 759–773. [Google Scholar] [CrossRef]
- Yao, H.; Han, C.; Xu, F. Reasoning Methods of Unmanned Underwater Vehicle Situation Awareness Based on Ontology and Bayesian Network. Complexity 2022, 2022, 7143974. [Google Scholar] [CrossRef]
- Mishra, S.K.; Sarkar, A. Service-Oriented Architecture for Internet of Things: A Semantic Approach. J. King Saud Univ. -Comput. Inf. Sci. 2021, 34, 8765–8776. [Google Scholar] [CrossRef]
- Catherine, R.; Stephan, B.; Geraldine, A.; Daniel, B. Semantic Web 0 (0) 1 1 IOS Press Weather Data Publication on the LOD Using SOSA/SSN Ontology; IOS Press: Amsterdam, The Netherlands, 2020. [Google Scholar]
- Wu, J.; Orlandi, F.; O’sullivan, D.; Dev, S. An ontology model for climatic data analysis. arXiv 2021, arXiv:2106.03085. [Google Scholar]
- Rahmati, M.; Nadeem, M.; Sadhu, V.; Pompili, D. UW-MARL: Multi-agent reinforcement learning for underwater adaptive sampling using autonomous vehicles. In Proceedings of the ACM International Conference Proceeding Series, Association for Computing Machinery, Bali Island, Indonesia, 23 October 2019. [Google Scholar]
- Guerrero, E.; Bonin-Font, F.; Oliver, G. Adaptive Visual Information Gathering for Autonomous Exploration of Underwater Environments. IEEE Access 2021, 9, 136487–136506. [Google Scholar] [CrossRef]
- Himri, K.; Ridao, P.; Gracias, N. Underwater Object Recognition Using Point-Features, Bayesian Estimation and Semantic Information. Sensors 2021, 21, 1807. [Google Scholar] [CrossRef]
- Sung, M.; Kim, J.; Lee, M.; Kim, B.; Kim, T.; Kim, J.; Yu, S.C. Realistic Sonar Image Simulation Using Deep Learning for Underwater Object Detection. Int. J. Control Autom. Syst. 2020, 18, 523–534. [Google Scholar] [CrossRef]
- Yazid, M.; Tayeb, K. Ontology-based Cyber Risk Monitoring Using Cyber Threat Intelligence. In Proceedings of the 16th International Conference on Availability, Reliability and Security (ARES 21), Vienna, Austria, 17–20 August 2021; Association for Computing Machinery: New York, NY, USA, 2021. Article 88. pp. 1–8. [Google Scholar] [CrossRef]
- Adi, A.; Węcel, K.; Abramowicz, W. The Semantic Approach to Cyber Security. Towards Ontology Based Body of Knowledge. In Proceedings of the European Conference on Information Warfare and Security, ECCWS, Hatfield, UK, 2–3 July 2015; pp. 328–336. [Google Scholar]
- What Are Indicators of Compromise? Digital Guardian. Available online: https://digitalguardian.com/blog/what-are-indicators-compromise (accessed on 5 October 2022).
- Doynikova, E.; Fedorchenko, A.; Kotenko, I. A Semantic Model for Security Evaluation of Information Systems. J. Cyber Secur. Mobil. 2020, 9, 301–330. [Google Scholar] [CrossRef]
- Kotenko, I.; Polubelova, O.; Saenko, I.; Doynikova, E. The Ontology of Metrics for Security Evaluation and Decision Support in SIEM Systems; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2013; pp. 638–645. [Google Scholar] [CrossRef]
- Syed, R. Cybersecurity Vulnerability Management: A Conceptual Ontology and Cyber Intelligence Alert System. Inf. Manag. 2020, 57, 1–17. [Google Scholar] [CrossRef]
- Syed, Z.; Padia, A.; Finin, T.; Joshi, A.; Mathews, L. UCO: A Unified Cybersecurity Ontology. In Proceedings of the Thirtieth AAAI Conference on Artificial Intelligence Artificial Intelligence for Cyber Security, Phoenix, AZ, USA, 12–13 February 2016; Technical Report WS-16-03. Association for the Advancement of Artificial Intelligence: Washington, DC, USA, 2016. [Google Scholar]
- CVE. Overview. Available online: https://www.cve.org/About/Overview (accessed on 5 October 2022).
- Common Configuration Enumeration (CCE)—FAQs. Available online: https://cce.mitre.org/about/faqs.html (accessed on 5 October 2022).
- Liu, Z.; Sun, Z.; Chen, J.; Zhou, Y.; Yang, T.; Yang, H.; Liu, J. STIX-Based Network Security Knowledge Graph Ontology Modeling Method; Association for Computing Machinery (ACM): New York, NY, USA, 2020; pp. 152–157. [Google Scholar]
- Pastuszuk, J.; Burek, P.; Ksiezopolski, B. Cybersecurity ontology for dynamic analysis of IT systems. Procedia Comput. Sci. 2021, 192, 1011–1020. [Google Scholar] [CrossRef]
- Pereira-Vale, A.; Fernández, E.B.; Pereira Vale, A.; Fernandez, E.B. An Ontology for Security Patterns; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2019. [Google Scholar]
- Information Model—Wikipedia. Available online: https://en.wikipedia.org/wiki/Information_model (accessed on 5 October 2022).
- Bray, T.; Weinberger, D.; Trippe, B.; Guenette, D.R.; Holst, S.; Altekar, G.; Laplante, M.; Maziarka, M.; Dionne, S.G. What is an information model & why do you need one? Gilbane Rep. 2002, 10, 1–32. [Google Scholar]
- Kang, S.; Jin, R.; Deng, X.; Kenett, R.S. Challenges of Modeling and Analysis in Cybermanufacturing: A Review from a Machine Learning and Computation Perspective. J. Intell. Manuf. 2021. [Google Scholar] [CrossRef]
- Qin, C.; Du, J.; Wang, J.; Ren, Y. A Hierarchical Information Acquisition System for AUV Assisted Internet of Underwater Things. IEEE Access 2020, 8, 176089–176100. [Google Scholar] [CrossRef]
- Du, Z.; Wang, W.; Chai, H.; Xiang, M.Z.; Zhang, F.; Huang, Z. Configuration Analysis Method and Geometric Interpretation of UUVs Cooperative Localization Based on Error Ellipse. Ocean. Eng. 2022, 244, 110299. [Google Scholar] [CrossRef]
- Aziz El-Banna, A.A.; Wu, K. Introduction to underwater communication and IoUT networks. In Springer Briefs in Computer Science; Springer: Berlin/Heidelberg, Germany, 2021; pp. 1–8. [Google Scholar]
- Brazhuk, A. Towards Automation of Threat Modeling Based on a Semantic Model of Attack Patterns and Weaknesses. arXiv 2021, arXiv:2112.04231. [Google Scholar]
- Bolbot, V.; Theotokatos, G.; Boulougouris, E.; Vassalos, D. Safety Related Cyber-Attacks Identification and Assessment for Autonomous Inland Ships Computational Investigation of a Large Marine Two-Stroke Dual Fuel Engine View Project FLOWMART View Project Safety Related Cyber-Attacks Identification and Assessment for Autonomous Inland Ships; Aalto University: Espoo, Finland, 2019; Volume 17. [Google Scholar]
- Dargahi, T.; Javadi, H.H.S.; Shafiei, H. Securing Underwater Sensor Networks Against Routing Attacks. Wirel. Pers. Commun. 2017, 96, 2585–2602. [Google Scholar] [CrossRef]
- Alharbi, A. DBSR: A Depth-Based Secure Routing Protocol for Underwater Sensor Networks; The Science and Information Organization: West Yorkshire, UK, 2020; Volume 11. [Google Scholar]
- Yan, H.; Shi, J.; Cui, J.-H. DBR: Depth-Based Routing for Underwater Sensor Networks; The Science and Information Organization: West Yorkshire, UK, 2020. [Google Scholar]
- Suratkar, S.; Shah, K.; Sood, A.; Loya, A.; Bisure, D.; Patil, U.; Kazi, F. An Adaptive Honeypot Using Q-Learning with Severity Analyzer. J. Ambient Intell. Humaniz. Comput. 2021, 13, 4865–4876. [Google Scholar] [CrossRef]
- Franco, J.; Aris, A.; Canberk, B.; Uluagac, A.S. A Survey of Honeypots and Honeynets for Internet of Things, Industrial Internet of Things, and Cyber-Physical Systems. arXiv 2021, arXiv:2108.02287v1. [Google Scholar] [CrossRef]
- Huang, L.; Zhu, Q. Adaptive Honeypot Engagement through Reinforcement Learning of Semi-Markov Decision Processes; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar] [CrossRef]
- Mohseni-Bonab, S.M.; Hajebrahimi, A.; Kamwa, I.; Moeini, A. Transmission and Distribution Co-Simulation: A Review and Propositions. IET Gener. Transm. Distrib. 2020, 14, 4631–4642. [Google Scholar] [CrossRef]
- Bhattacharjya, K.; De, D. IoUT: Modelling and Simulation of Edge-Drone-Based Software-Defined Smart Internet of Underwater Things. Simul. Model. Pract. Theory 2021, 109, 102304. [Google Scholar] [CrossRef]
- Nayyar, A.; Balas, V.E. Analysis of simulation tools for underwater sensor networks (UWSNs). In Lecture Notes in Networks and Systems; Springer: Berlin/Heidelberg, Germany, 2019; Volume 55, pp. 165–180. [Google Scholar]
- Petrioli, C.; Petroccia, R.; Spaccini, D.; Vitaletti, A.; Arzilli, T.; Lamanna, D.; Galizial, A.; Renzi, E. The SUNRISE GATE: Accessing the SUNRISE federation of facilities to test solutions for the Internet of underwater things. In Proceedings of the 2014 Underwater Communications and Networking, UComms 2014, Sestri Levante, Italy, 3–5 September 2014; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2014. [Google Scholar]
- Fakhar, F. Investigate Network Simulation Tools in Designing and Managing Intelligent Systems. J. Indormation Syst. Telecommun. 2019, 7, 278–293. [Google Scholar]
- Teixeira, F.B.; Ferreira, B.M.; Moreira, N.; Abreu, N.; Villa, M.; Loureiro, J.P.; Cruz, N.A.; Alves, J.C.; Ricardo, M.; Campos, R. A Novel Simulation Platform for Underwater Data Muling Communications Using Autonomous Underwater Vehicles. Computers 2021, 10, 119. [Google Scholar] [CrossRef]
- Guerra, F.; Casari, P.; Zorzi, M. World Ocean Simulation System (WOSS): A simulation tool for underwater networks with realistic propagation modeling. In Proceedings of the 4th ACM International Workshop on UnderWater Networks, WUWNet ’09, New York, NY, USA, 3 November 2009. [Google Scholar]
- Katkar, D.; Ghorpade, D.V. Comparative Study of Network Simulator: NS2 and NS3. 2016. Available online: https://www.semanticscholar.org/paper/Comparative-Study-of-Network-Simulator%3A-NS2-and-NS3-Katkar-Ghorpade/676a95605545f1abf74c321367a99944a06576fb (accessed on 20 November 2022).
- Gazebo. Available online: https://gazebosim.org/home (accessed on 6 October 2022).
- Mengacci, R.; Zambella, G.; Grioli, G.; Caporale, D.; Catalano, M.G.; Bicchi, A. An Open-Source ROS-Gazebo Toolbox for Simulating Robots with Compliant Actuators. Front. Robot AI 2021, 8, 3083. [Google Scholar] [CrossRef]
- Bajaj, L.; Takai, M.; Ahuja, R.; Tang, K.; Bagrodia, R.; Gerla, M. GloMoSim: A Scalable Network Simulation Environment; Network Simulation Tools: Coimbatore, India, 2002. [Google Scholar]
- Idris, S.; Karunathilake, T.; Förster, A. Survey and Comparative Study of LoRa-Enabled Simulators for Internet of Things and Wireless Sensor Networks. Sensors 2022, 22, 5546. [Google Scholar] [CrossRef]
- Comparison of GNS3 vs EVE-NG vs Packet Tracer for Networks Simulation. Available online: https://www.networkstraining.com/gns3-vs-eve-ng-vs-cisco-packet-tracer/ (accessed on 20 November 2022).
- Chhokra, A.; Barreto, C.; Dubey, A.; Karsai, G.; Koutsoukos, X. Power-Attack: A Comprehensive Tool-Chain for Modeling and Simulating Attacks in Power Systems; Association for Computing Machinery (ACM): New York, NY, USA, 2021. [Google Scholar]
- Balyk, A.; Karpinski, M.; Naglik, A.; Shangytbayeva, G. Using Graphic Network Simulator 3 for DDoS Attacks Simulation Method of Protection against Traffic Termination in VOIP View Project Using Graphic Network Simulator 3 for Ddos Attacks Simulation. Int. J. Comput. 2017, 16, 219–225. [Google Scholar] [CrossRef]
- Aggarwal, P.; Gonzalez, C.; Dutt, V. HackIt: A real-time simulation tool for studying real-world cyberattacks in the laboratory. In Handbook of Computer Networks and Cyber Security: Principles and Paradigms; Springer International Publishing: Berlin/Heidelberg, Germany, 2019; pp. 949–959. ISBN 9783030222772. [Google Scholar]
- Aggarwal, P.; Gautam, A.; Agarwal, V.; Gonzalez, C.; Dutt, V. HackIT: A human-in-the-loop simulation tool for realistic cyber deception experiments. In Proceedings of the Advances in Intelligent Systems and Computing; Springer: Berlin/Heidelberg, Germany, 2020; Volume 960, pp. 109–121. [Google Scholar]
- MITRE ATT&CK®. Available online: https://attack.mitre.org/ (accessed on 4 October 2022).
- Welcome to CALDERA’s Documentation!—Caldera Documentation. Available online: https://caldera.readthedocs.io/en/latest/ (accessed on 4 October 2022).
- Simulation Software: Protecting Organisations during the Cyber War. Available online: https://www.information-age.com/simulation-software-cyber-war-123484859/ (accessed on 4 October 2022).
- Zhao, Y.; Wang, Y.; Zhang, H.; Zhang, C.; Yang, C. Agent-Based Network Security Simulator Nessi2; Atlantis Press: Amsterdam, The Netherlands, 2015. [Google Scholar]
- Le, T.D.; Anwar, A.; Loke, S.W.; Beuran, R.; Tan, Y. Grid Attacksim: A Cyber Attack Simulation Framework for Smart Grids. Electronics 2020, 9, 1218. [Google Scholar] [CrossRef]
- Foreseeti—Foreseeti. Available online: https://foreseeti.com/ (accessed on 20 November 2022).
- Red Canary. Available online: https://redcanary.com/blog/comparing-red-team-platforms/ (accessed on 20 November 2022).
- Release the Monkey! How Infection Monkey Tests Network Security. InsiderPro. Available online: https://www.idginsiderpro.com/article/3519490/release-the-monkey-how-infection-monkey-tests-network-security.html (accessed on 20 November 2022).
- Bloodhound—A Tool for Exploring Active Directory Domain Security—Latest Hacking News. Cyber Security News, Hacking Tools and Penetration Testing Courses. Available online: https://latesthackingnews.com/2018/09/25/bloodhound-a-tool-for-exploring-active-directory-domain-security/ (accessed on 20 November 2022).
- Cornejo-Lupa, M.A.; Cardinale, Y.; Ticona-Herrera, R.; Barrios-Aranibar, D.; Andrade, M.; Diaz-Amado, J. Ontoslam: An Ontology for Representing Location and Simultaneous Mapping Information for Autonomous Robots. Robotics 2021, 10, 125. [Google Scholar] [CrossRef]
- Le, T.D.; Anwar, A.; Beuran, R.; Loke, S.W. Smart grid co-simulation tools: Review and cybersecurity case study. In Proceedings of the 7th International Conference on Smart Grid, icSmartGrid 2019, Newcastle, NSW, Australia, 9–11 December 2019; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2019; pp. 39–45. [Google Scholar]
- Wu, J.; Yang, Y.; Cheng, X.U.N.; Zuo, H.; Cheng, Z. The development of digital twin technology review. In Proceedings of the 2020 Chinese Automation Congress, CAC 2020, Shanghai, China, 6–8 November 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020; pp. 4901–4906. [Google Scholar]
- Kotis, K.; Katasonov, A. Semantic Interoperability on the Internet of Things: The Semantic Smart Gateway Framework. Int. J. Distrib. Syst. Technol. 2013, 4, 47–69. [Google Scholar] [CrossRef]
- Ahmad, I.; Rahman, T.; Zeb, A.; Khan, I.; Ullah, I.; Hamam, H.; Cheikhrouhou, O. Analysis of Security Attacks and Taxonomy in Underwater Wireless Sensor Networks. Wirel. Commun. Mob. Comput. 2021, 2021, 1444024. [Google Scholar] [CrossRef]
- Stavrinos, S.; Kotis, K.; Kalloniatis, C. Towards Semantic Modeling and Simulation of Cybersecurity on the Internet of Underwater Things. IFIP Adv. Inf. Commun. Technol. 2022, 646, 145–156. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sub-Criteria | Explanation |
|---|---|
| Accessibility | Availability of source code on GitHub |
| Up-to-date and version |
|
| Programming language | The main programming language the simulation tool is written (focused on Python, due to the extensive library availability) |
| Testing and efficiency | Whether the software developed for underwater environment or cyberattack for underwater environment |
| Input |
|
| Output | Whether it can represent knowledge in a visualized environment or extracts statistical data, analytic reports, graph models, etc. |
| Integrity | Integration with other software packages |
| Execution |
|
| Limitations | Size of the input data it accepts, number of nodes, accuracy of time data, etc. |
| Documentation | Availability of manual, recent literature, and helpful videos |
| Sub-Criteria | Explanation |
|---|---|
| Attack lifecycle | Whether it can simulate the full lifecycle of an attack (pre-compromise, post-compromise) |
| Up-to-date libraries | Updated with current sophisticated attacks |
| Report |
|
| Integration | Integration with cybersecurity frameworks for risk and vulnerability assessment |
| Customization | Whether user is capable of customizing values and elements of an attack |
| Realism | Whether the scenarios, attacks and defend procedures simulated correspond to realistic incidents |
| Name of Tool | Programming Language | Easy to Use | Heterogeneity Support | GUI Support | Documentation Availability |
|---|---|---|---|---|---|
| WOSS [100] | NS-3-based, C++ | Medium | High | No | Yes |
| AQUA-Sim [96] | NS-2-based | High | Medium | Yes | Yes |
| NS-2 [101] | C, C++, OTcl | High | High | Limited | Yes |
| NS-3 [101] | C++ (optional Python bindings) | Medium | High | Yes | Yes |
| SUNRISE [97] | NS-2-based | Medium | High | No | Yes |
| OMNeT++ [98] | C++ | High | Medium | Yes | Limited |
| UDMSim [99] | NS-3-based, AML | Medium | High | No | Limited |
| Gazebo [102,103] | C++ | Medium | High | Yes | Excellent |
| QualNet [95] | C++ | Medium | Medium | Yes | Excellent |
| GloMoSim [104] | C | Low | Medium | Limited | Limited |
| TOSSIM [105] | Python, C++ | High | Medium | Yes | Yes |
| EVE-NG [106] | Python, Java and Ansible libraries | High | High | Yes | Yes |
| Name of Tool | Network Support Type | Protocol Injection | Number of Nodes | Additional Functionalities |
|---|---|---|---|---|
| WOSS | Wireless Sensor, Underwater | Yes | - | Integration of any existing underwater channel simulator with environmental data as input |
| AQUA-Sim | Wireless Sensor, Underwater | Yes | - | Accuracy in environmental conditions (wind, current, waves, etc.) |
| NS-2 | Wired/Wireless Sensor, Underwater | Yes | <3000 | Protocol simulation, configuration of network entities, event logging |
| NS-3 | Wired/Wireless Sensor, Underwater | Yes | Unlimited | Multi-tier heterogeneous network, PCAP format, variety of modules |
| OMNeT++ | Wireless, Underwater | Yes | - | Real-time simulation, database integration |
| UDMSim | Wired/Wireless Sensor, Underwater | Yes | - | Trace-based network simulation with NS-3 |
| Gazebo | Wired/Wireless Sensor, Underwater | Yes | Unlimited | Extensive set of sensors, models and plug-ins, and ROS integration |
| QualNet | Wireless Sensor, Underwater | Yes | <20,000 | Illustration of security models (eavesdropping, DoS attack, etc.) |
| GloMoSim | Wired/Limited Wireless, Underwater | Yes | <10,000 | Offers standard APIs |
| TOSSIM | Wireless sensor network emulation | Yes | <1000 | Powerful and lightweight simulation |
| EVE-NG | Wired/Wireless sensor networks, Software Defined Network, Cloud | Yes | >1000 | Huge capabilities even in the commercial version, but even more in paid version |
| Tool | Attack Variety | Realism | Advantages | Disadvantages |
|---|---|---|---|---|
| GridAttack Sim [115] | Medium | Medium | Co-simulation with NS-3, detailed report analysis, simple GUI | Designed mainly for surface smart grid topologies |
| Foreseeti [116] | High | High | Powerful visualization, detailed analysis report and probabilistic feature which recommends implementation of security mechanisms | Two licenses, commercial one has limited features |
| GNS-3 [106] | High | High | Design of complex network topologies, real-time packet capture, connection of the simulated world to the real world | Two licenses, commercial one has limited features |
| HackIt [109,110] | High | High | Variety of protocols integration | Only command-line feature (No GUI) |
| Caldera [117] | High | High | Autonomous adversary emulation and incident response, choice of defender or attacker | Difficult configuration |
| NeSSi2 [113,114] | Medium | Medium | Manual creation of network with variety of devices | Antiquated |
| Infection Monkey [118] | Medium | High | Visualization of adversary moves, analysis from well-known databases (MITRE ATT&CK, Zero Trust, etc.) | Limited variety of attacks |
| BloodHound [119] | High | Medium | Integrated function for queries | Developed mainly for Active Directory (AD) and Azure environment |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kotis, K.; Stavrinos, S.; Kalloniatis, C. Review on Semantic Modeling and Simulation of Cybersecurity and Interoperability on the Internet of Underwater Things. Future Internet 2023, 15, 11. https://doi.org/10.3390/fi15010011
Kotis K, Stavrinos S, Kalloniatis C. Review on Semantic Modeling and Simulation of Cybersecurity and Interoperability on the Internet of Underwater Things. Future Internet. 2023; 15(1):11. https://doi.org/10.3390/fi15010011
Chicago/Turabian StyleKotis, Konstantinos, Stavros Stavrinos, and Christos Kalloniatis. 2023. "Review on Semantic Modeling and Simulation of Cybersecurity and Interoperability on the Internet of Underwater Things" Future Internet 15, no. 1: 11. https://doi.org/10.3390/fi15010011
APA StyleKotis, K., Stavrinos, S., & Kalloniatis, C. (2023). Review on Semantic Modeling and Simulation of Cybersecurity and Interoperability on the Internet of Underwater Things. Future Internet, 15(1), 11. https://doi.org/10.3390/fi15010011