1. Introduction
Although the PNT service provided by GNSS has the characteristics of all-weather, all-time and global coverage [
1], GNSS also has obvious weaknesses, such as GNSS signal being easy to be obscured, interfered and deceived, resulting in the security and integrity of PNT service [
2,
3]. Any single PNT information source may have risks. PNT services involving personal safety must be safe and reliable. Therefore, the utilization of “redundant” PNT information is very important in complex environments [
4].
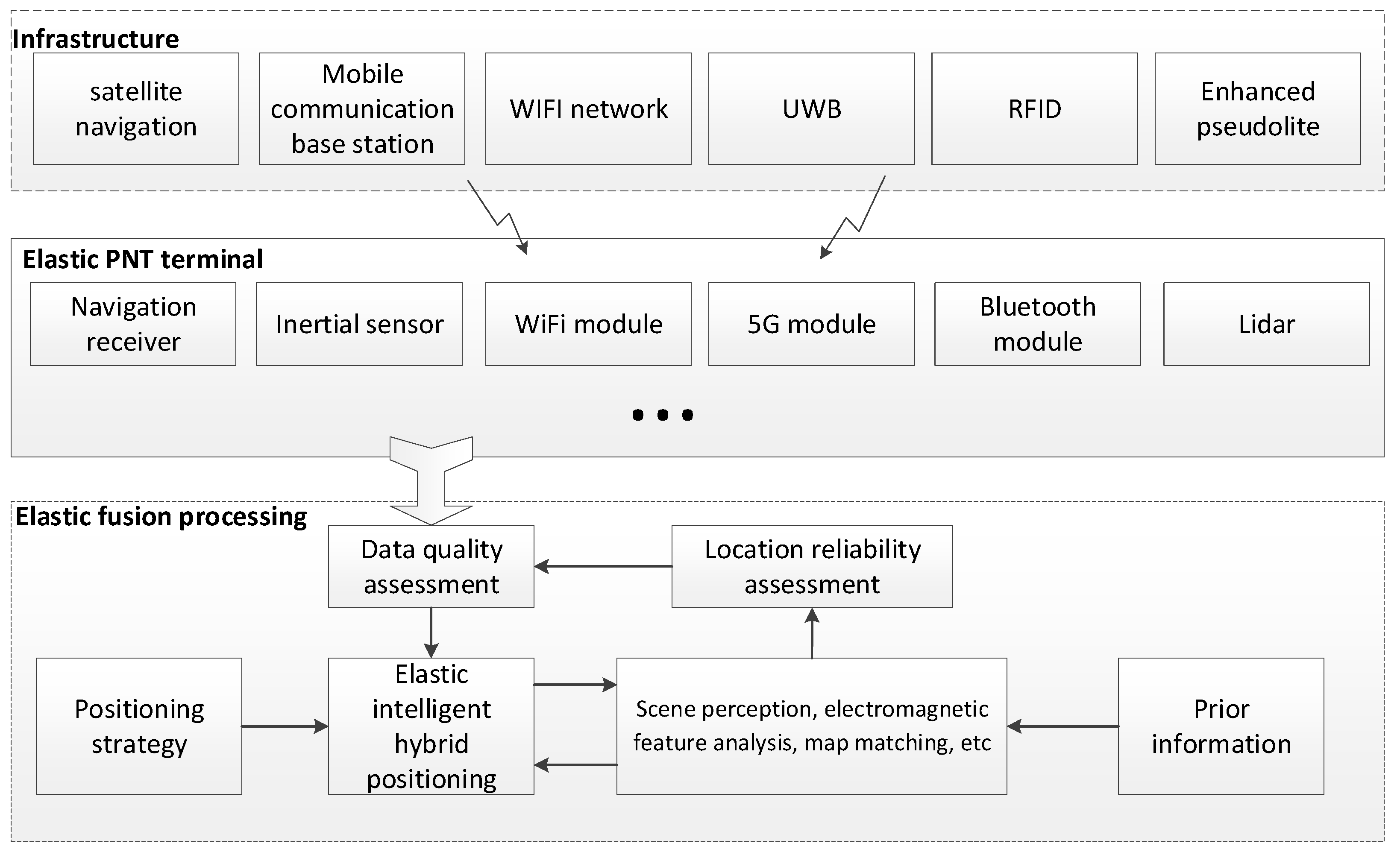
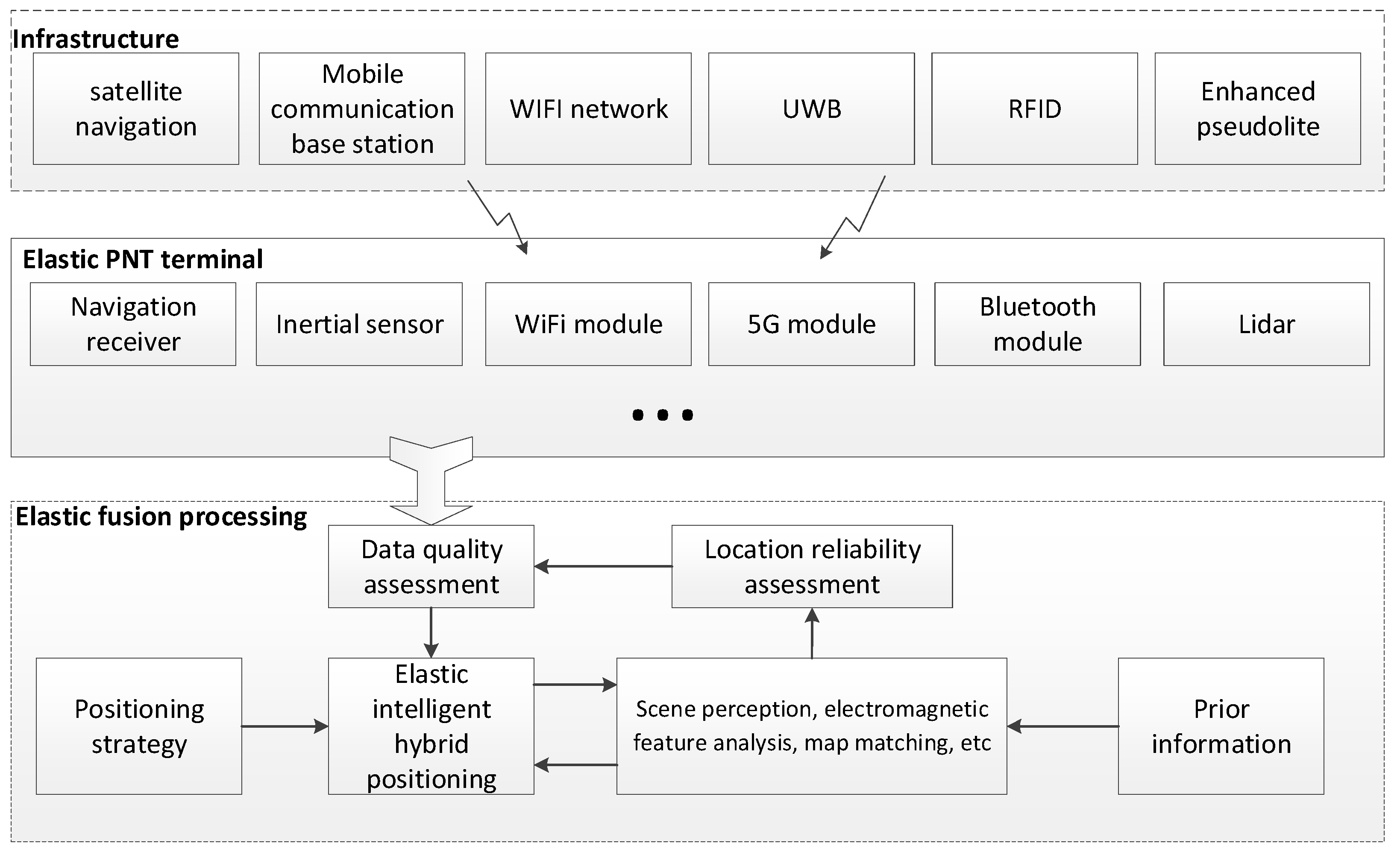
The fundamental significance of the research on elastic PNT navigation and positioning technology is to help the satellite navigation system, make full use of the redundant information of multisource sensors, improve the reliability, safety and robustness of indoor and outdoor dynamic navigation and positioning and form new services that are not available in the current satellite navigation system. Therefore, the significance of “elastic PNT navigation and positioning technology” is to solve the problem that a single satellite navigation terminal cannot realize continuous, stable and reliable submeter real-time location service indoors and outdoors in complex environments [
5]. The precise and seamless space-time location service provided by multisource elastic integration positioning will become an important benchmark to measure the smart economy and smart society. The multisource elastic fusion positioning technology will promote PNT from single, individual and regional to comprehensive, group and global. In the future, the multisource elastic fusion positioning network will develop towards IOT and intelligence. Multi-source elastic fusion positioning technology has attracted extensive attention in industry because of its high positioning accuracy and high robustness. The problem of multisource elastic fusion location technology mainly focuses on the design of the fusion algorithm. The following problems must be considered in the positioning design of multisource elastic fusion [
6]: a dynamic target is tracked by multiple different sensors and each sensor has different measurement results and noise characteristics. We must also consider how to dynamically adjust the weights of measurement results of multiple sensors according to environmental changes to make the final fusion estimation result better than that of a single sensor or more stable positioning [
7].
Domestic and foreign experts have done a lot of research and published many papers on indoor and outdoor multisource fusion seamless positioning. For example, at the beginning, people used inertial sensors to obtain pedestrian heading and step information outdoors and fused with satellite navigation to improve the stability of navigation and positioning [
8,
9]. However, when satellite navigation is not available, the integrated positioning of inertial navigation and satellite navigation cannot maintain high navigation and positioning accuracy for a long time. The combination of communication base stations and satellite navigation is used to solve the navigation and positioning problem in urban canyons [
10,
11,
12], which can solve the outdoor blind supplement navigation and positioning problem of satellite navigation, but it cannot solve the indoor navigation and positioning problem. In indoor navigation and positioning, Bluetooth is used for navigation and positioning, and its coverage and positioning accuracy are related to the deployment number of Bluetooth modules. Generally, the deployment interval of Bluetooth modules with positioning accuracy of 1 m is about 1 m [
13,
14,
15], and the ability of large-scale promotion is poor. Most of the existing mobile communication devices, including wireless local area networks (WLANs), smart phones and laptops, are embedded with Wi-Fi modules, which can be used to build indoor Wi-Fi positioning systems [
16,
17]. However, Wi-Fi positioning usually requires the positioning method of fingerprint comparison, and the fingerprint database needs to be established in advance, the workload is large, and the positioning accuracy is about 3–5 M. Optical navigation is also a new navigation method rising in recent years, but optical navigation can only provide relative position and is greatly affected by light [
18,
19]. Pseudolites can be used in indoor and outdoor navigation and positioning and have good navigation and positioning accuracy, but the positioning performance in indoor and outdoor switching zones and indoor narrow and long zones is poor [
20,
21,
22]. A single navigation source cannot solve the problem of navigation and positioning in indoor and outdoor complex and changeable environments. People have successively studied the navigation and positioning technology of multisource fusion [
23,
24,
25]. However, in complex and changeable environments, the indiscriminate fusion of multisource sensor information will reduce the navigation and positioning accuracy of the carrier and affect the stability of navigation and positioning. Therefore, it is necessary to study the multisource elastic fusion navigation and positioning method.
At present, the research mainly focuses on the integration of satellite navigation, Wi-Fi, Bluetooth, 5G, inertial navigation, visual sensors and other navigation sources [
7]. The amount of research on multisource elastic fusion navigation and positioning is relatively little, and how to make reliable use of elastic navigation resources is still unknown. This paper presents an indoor and outdoor multisource elastic fusion positioning algorithm based on particle filters. The algorithm flexibly selects the currently available sensor data and weights according to environmental elasticity to realize continuous and stable navigation and positioning in indoor complex environments. The innovative contribution of this paper is mainly reflected in the following aspects:
1. The relationship between inertial sensor data and Wi-Fi, Bluetooth and pseudolites is deduced, and the multisource sensor integrated positioning model is constructed;
2. An elastic navigation and positioning method based on particle filters is proposed, which can adaptively select the current multisource sensor data and sensor particle weight according to the environmental change, form the optimal elastic fusion positioning model and solve the problem of seamless navigation and positioning in indoor and outdoor complex environments;
3. The indoor and outdoor complex environments are built, and a large number of experiments are carried out to verify the navigation and positioning performance of the proposed algorithm in complex and changeable environments.
3. Sensor Positioning Principle
This section briefly introduces the navigation and positioning principles of several common sensors and gives the implementation steps.
3.1. Principle of Indoor Pseudosatellite Positioning
A pseudolite is usually fixed at a known position, and the position of the receiver can be obtained by using the pseudorange observation measurement. In theory, the position of the receiver can be obtained by using the simultaneous equations of the coordinates of three pseudolites and the receiver. However, in the process of practical application, the time between the pseudolite system and the receiver cannot be fully synchronized, and there is usually a certain clock deviation. Therefore, in order to calculate the coordinate position of the receiver, the clock difference needs to be taken into account as an unknown quantity. At least four pseudolites are needed to achieve positioning.
We assume that the pseudocode ranging and positioning equations of a pseudosatellite at time
are as follows:
where
is the carrier position coordinate at time
,
is the position coordinate of the
th base station,
is the propagation speed of electromagnetic waves,
is the time when the carrier signal reaches the
th base station at time
,
is the delay error of the
th pseudolite at time
,
is the system noise at time
,
is the number of visible base stations at time
and
is the distance from carrier
to the
th base station.
Suppose the measurement pseudoranges of base stations at time are , respectively. Then the position coordinate of the carrier at is and the measured pseudoranges of base stations at time are , respectively.
Formula (1) is a nonlinear equation. The Taylor expansion of Formula (1) at position
is as follows:
where
,
,
.
Formula (2) can be written as:
The data of each pseudosatellite base station of the least square algorithm can be solved. That is:
The pseudosatellite receiver can receive the pseudorange and carrier phase from the pseudosatellite to the receiver. However, due to the complex indoor environment, serious multipaths and occlusion, the pseudorange and carrier noise ratio jump greatly in the indoor environment, so it is not suitable for indoor use. However, the carrier phase change rate of pseudolites arriving at the receiver is relatively stable, which can be used as the observation of indoor positioning.
In the
calculation, the pseudorange is not calculated directly but recursively through the carrier phase change, that is:
where
is the wavelength of the carrier,
is the whole cycle number of the carrier phase change in the
th pseudolite from
to
and
is the less-than-full-cycle part of the carrier phase change in the
th pseudolite from
to
.
In the indoor complex environment, the pseudorange can be directly used according to the actual environment or calculated through the carrier phase change rate so as to improve the navigation and positioning performance in the complex environment.
3.2. Wi-Fi/Bluetooth Positioning Principle
Wi-Fi/Bluetooth has the characteristics of low equipment cost and wide coverage. It is a positioning technology used more in indoor positioning. The geometric positioning method of Wi-Fi/Bluetooth mainly uses the RSSI attribute of Wi-Fi/Bluetooth and the propagation model of a Wi-Fi/Bluetooth signal in the air to carry out the inverse ranging of Wi-Fi transmission signal points [
26] so as to realize trilateral positioning. However, the accuracy of energy positioning is low, and the positioning effect is poor. It needs a dense array. Combined with inertial sensors, it can realize navigation and positioning with certain accuracy, and the positioning effect is poor when used alone.
At present, the positioning method of multistation joint direction finding based on array Bluetooth is relatively widely used and has good navigation and positioning effect. The positioning principle based on Bluetooth arrays is to measure the azimuth of the carrier reaching each base station through multiple array base stations. In indoor complex environments, due to the limitation of array aperture and installation structure, the direction finding of Bluetooth arrays generally does not measure the pitch angle of the carrier and generally adopts the method of fixing the height of the carrier. The azimuth measurement adopts high-resolution direction-finding methods, such as MUSIC [
27], ESPRIT [
28] and other algorithms, which have good direction finding effects. After obtaining the direction finding results of multiple base stations, the least square method can be used to locate the carrier.
Then the least square positioning method based on the direction finding of multiple Bluetooth base stations can be described as:
where
,
,
is the carrier position coordinate,
is the azimuth measurement result of
base stations and
are the position coordinates of
base stations.
3.3. Track Calculation Principle of Inertial Sensors
In recent years, due to the emergence of various miniaturized and low-cost inertial devices, the application field of track estimation based on inertial sensors has gradually expanded and can be applied to personnel navigation and positioning. In pedestrian navigation and positioning, the acceleration curve of pedestrian motion is similar to a sine wave, and each complete sine wave in the acceleration curve exactly corresponds to a walking cycle. Therefore, the statistics of steps are actually to identify and count the walking cycle from the acceleration curve and calculate the step size based on this. Therefore, correctly identifying the walking cycle is the key to the track calculation of inertial sensors.
where
is the position coordinate at time
,
is the step size of step
,
is the pitch angle at time
and
is the heading angle at time
. Pedestrian track estimation does not require high hardware requirements, and the calculation overhead is small, so it has good application value. However, due to the poor performance of the internal sensor devices of commercial mobile phones, it is easy to form a large deviation after a certain time accumulation and cannot be corrected. Therefore, other means are needed to correct the positioning information of PDR.
4. Elastic Fusion Location Algorithm
In the multiscene-switching and complex electromagnetic environment, the navigation and positioning signals received by the receiving terminal are not all direct signals. In the process of multisource fusion positioning, it is necessary to judge the availability of the current received signals and the participation rate of fusion positioning so as to complement each other and so as to achieve better navigation and positioning effects and realize seamless coverage indoors and outdoors. In the process of multisource fusion positioning, the selection of multisource data is very important. It is necessary to eliminate the positioning sources or positioning data greatly affected by the environment in order to achieve better navigation and positioning performance.
For homologous data, we can analyze whether there is a large jump in the data by comparing with the previous data so as to judge whether the current data are available, that is:
represents the observation of the th sensor at time and represents the observed change rate of the data of the th sensor from time to time .
Compare with the set threshold . If , it is considered that there is a jump in the data of the th sensor at time , which needs to be eliminated; otherwise, it is available. Threshold setting is related to carrier status and external environment.
In the multisource elastic fusion navigation algorithm, each navigation source is regarded as a variable node, and the variable node realizes local fusion at the function node. Finally, the navigation positioning of elastic fusion is realized by constructing a weighted constraint function.
Suppose the positioning result of the multisource sensor at time is , is the number of sensors and is the positioning result of the th sensor at time .
Suppose the fusion location result at
is
. Set the threshold value
according to the carrier moving speed and positioning time. Calculate the distance between the positioning results of
sensors at time
and the fusion positioning results at time
, that is,
Compare with the set threshold . If , it is considered that the positioning result of the th sensor is available; if , it is considered that the positioning result of the th sensor is not available, so the location results of unavailable sensors in the fusion location are eliminated. In the fusion location, eliminate the location results of unavailable sensors, and change the number of available sensors to .
Calculate the centroid
of the positioning results of the remaining
sensors, that is:
Calculate the distance
between the positioning results of the remaining
sensors and the centroid
, that is:
Then define the weight of
-time fusion weighting as:
where
is the mean square error of the positioning of the
th sensor.
Normalize the weight to obtain:
Weight the positioning results of the remaining
sensors, that is:
According to Equation (18), the elastic fusion positioning result at time can be obtained. The implementation steps of the algorithm can be described as follows:
(1) Compare the data of the same sensor at the current time and the previous time to judge whether there is a large jump in the current data. If the jump is greater than the set threshold, it is considered that the current data are not available and eliminated during positioning; on the contrary, it is considered that the current data are available;
(2) Calculate the distance between the -time positioning result of available multisource sensors and the -time fusion positioning result and compare it with the set threshold to eliminate the positioning result greater than the threshold;
(3) Calculate the centroid of the remaining positioning results, and calculate the distance between the positioning results of the remaining sensors and the centroid ;
(4) Construct the fusion weighting coefficient at the current time according to and location variance , and normalize the fusion weighting coefficient;
(5) Weight the remaining sensor positioning results and fuse the results to obtain the fusion positioning results at the current time.
This paper proposes an algorithm based on the elastic fusion of multisource data to realize stable and continuous navigation and positioning in complex environments, which can solve navigation and positioning problem in indoor and outdoor complex environments, improve the stability and positioning performance of navigation systems in complex environments and is suitable for multisource fusion navigation and positioning in complex environments.
6. Conclusions
In this paper, we propose an indoor and outdoor multisource fusion navigation and positioning algorithm based on particle filters. According to the navigation and positioning requirements of indoor and outdoor complex scenes, this method uses a variety of sensor information to construct a multisource elastic fusion positioning model, eliminates abnormal positioning results according to the previous moment’s positioning results and carrier motion state and calculates the centroid of the remaining multisource sensor positioning results. With consideration of the results from different sensors and the accuracy of different sensors, it shows that: the weights of different sensor results are given to achieve the flexible fusion localization of multisensor simultaneous interpreting.
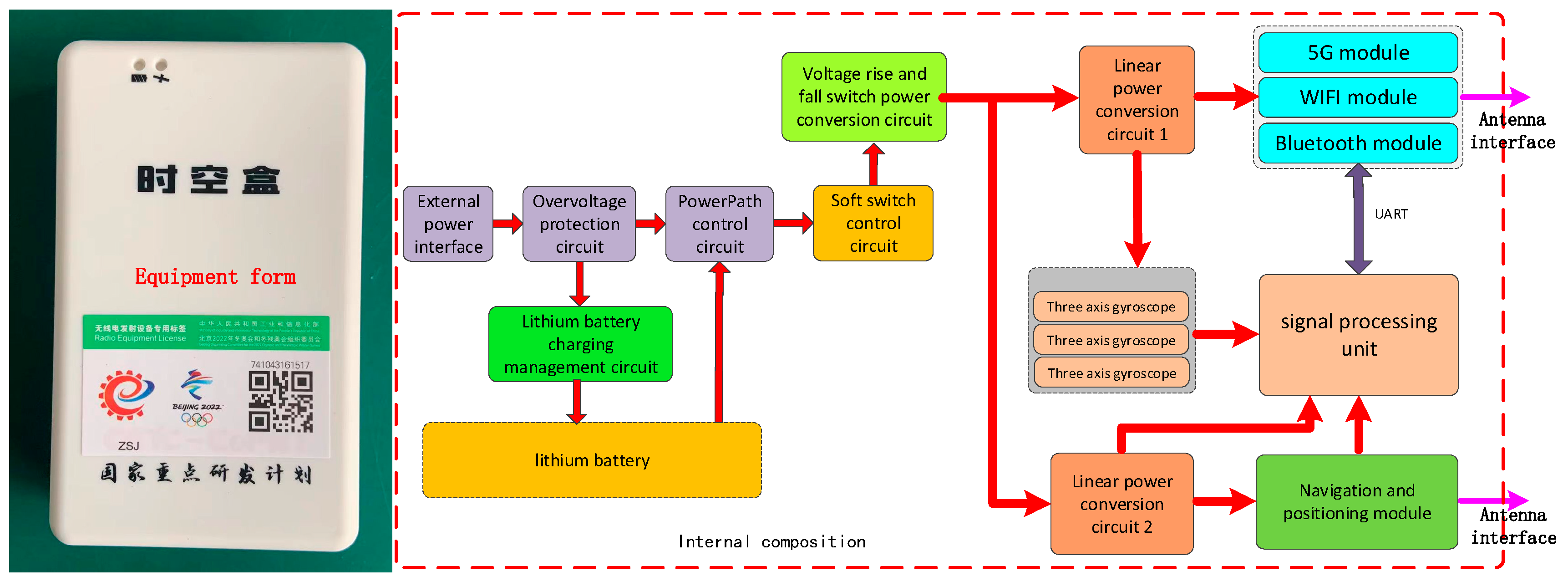
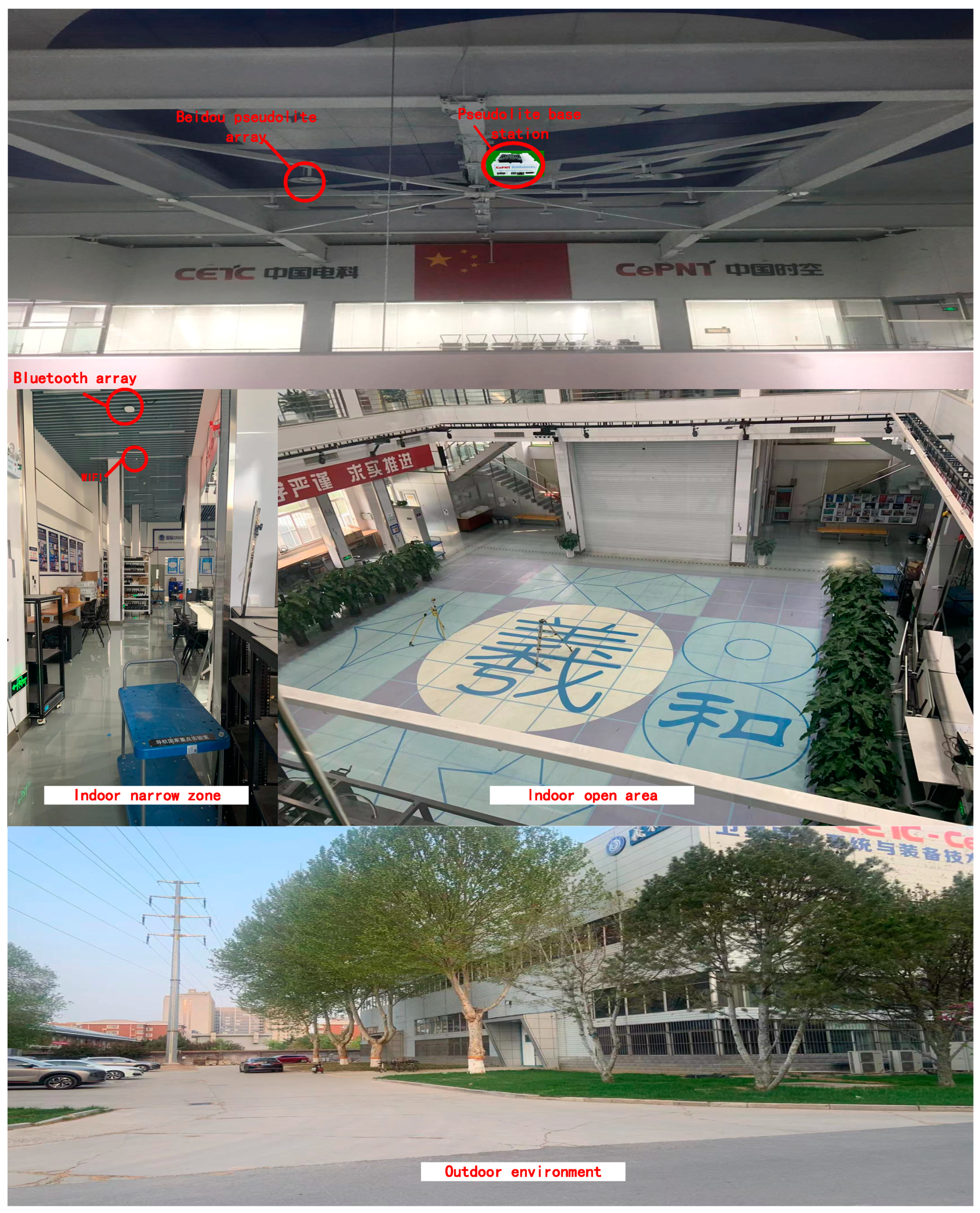
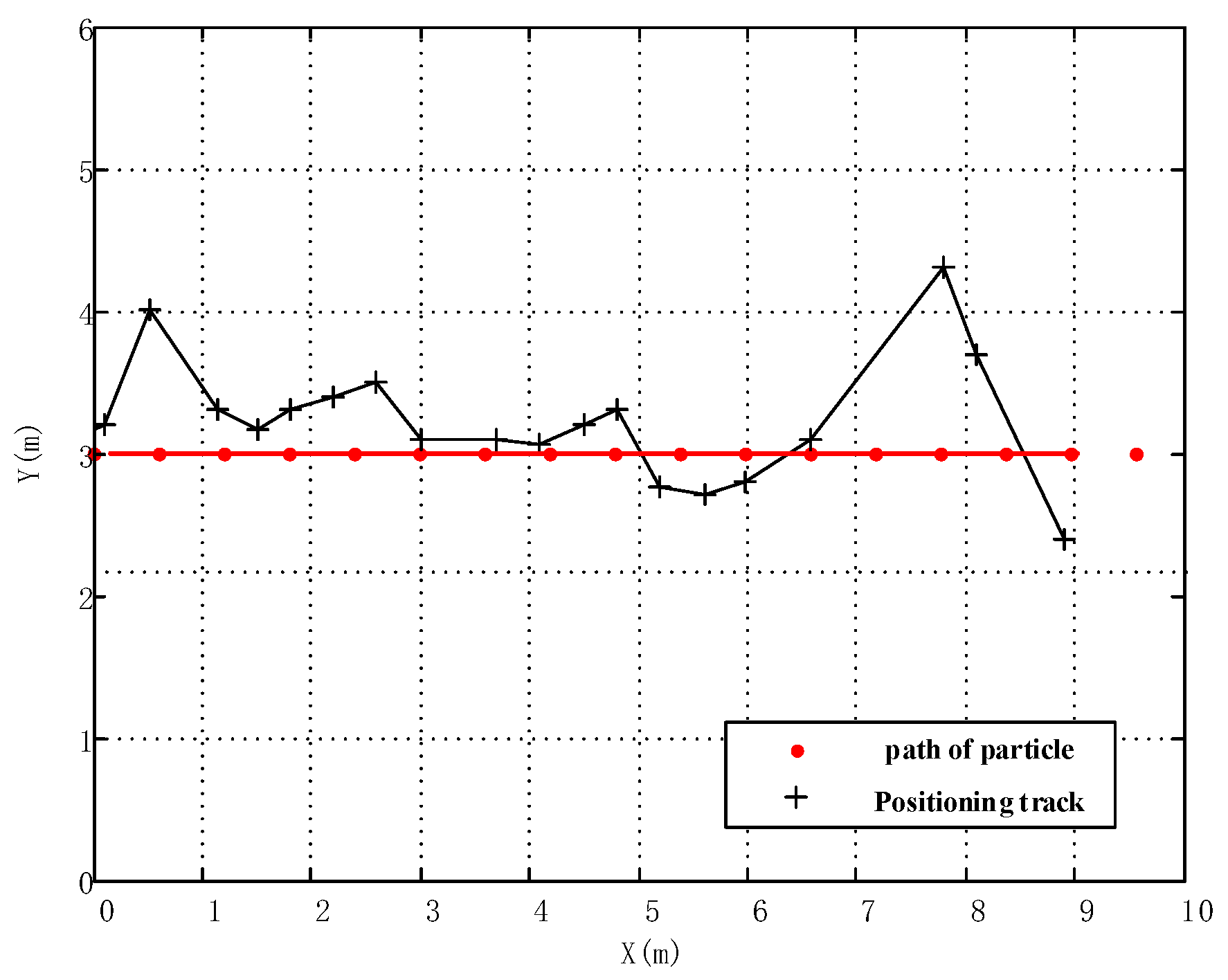
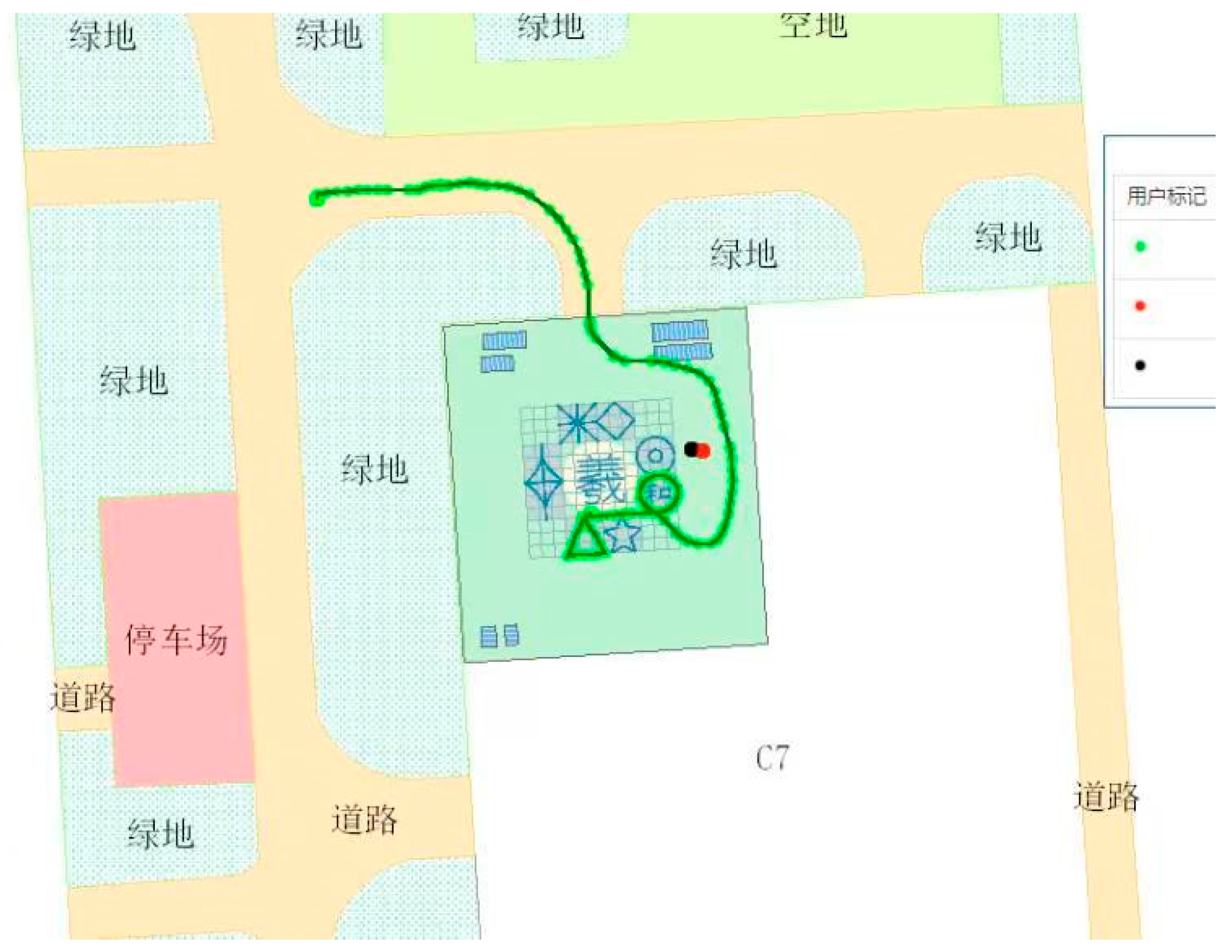
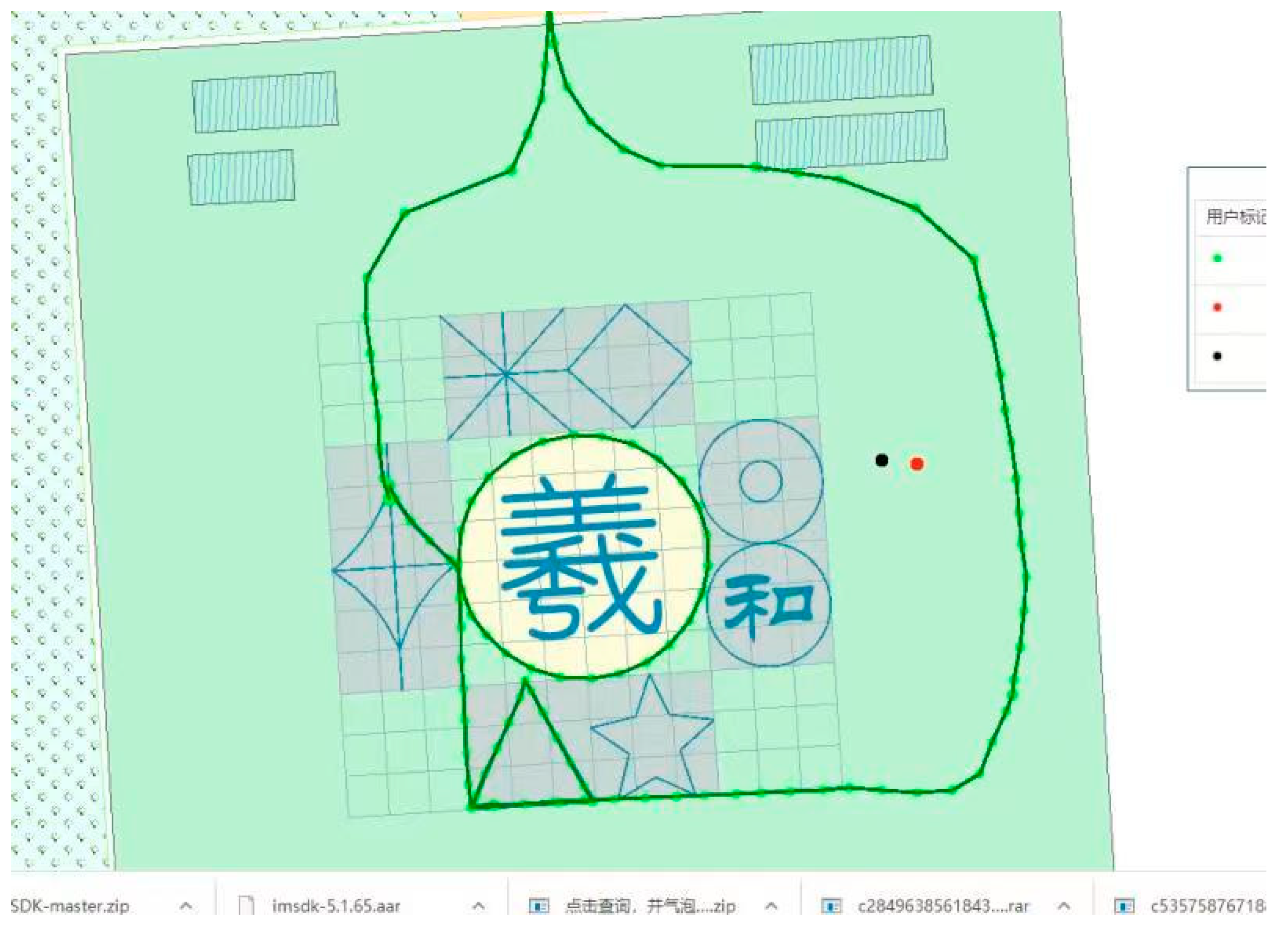
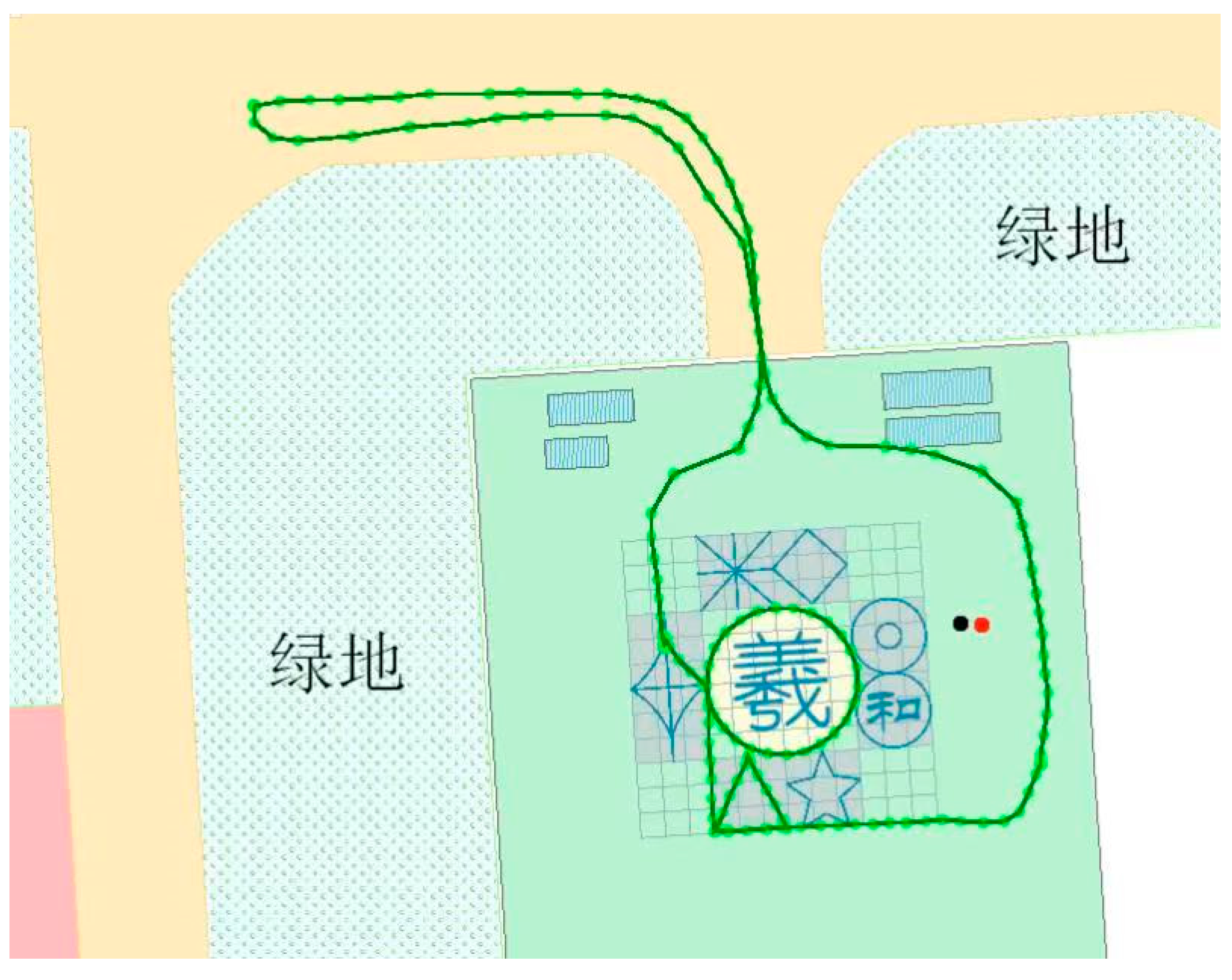
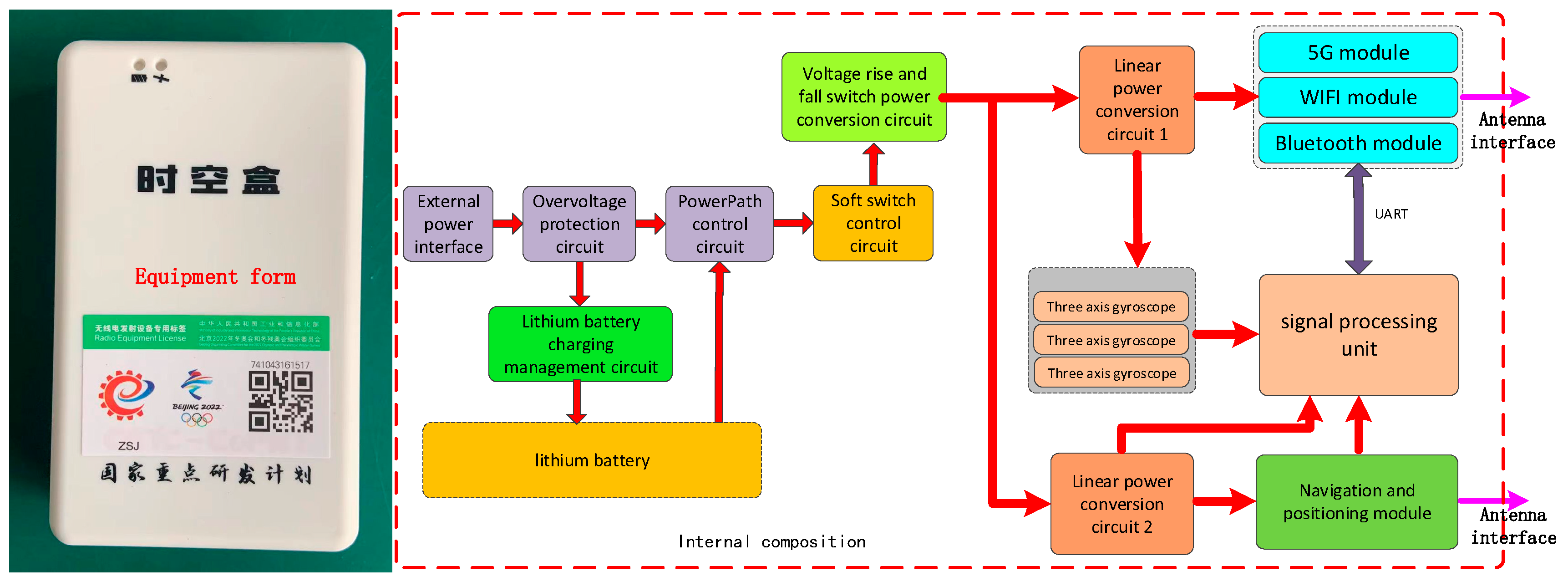
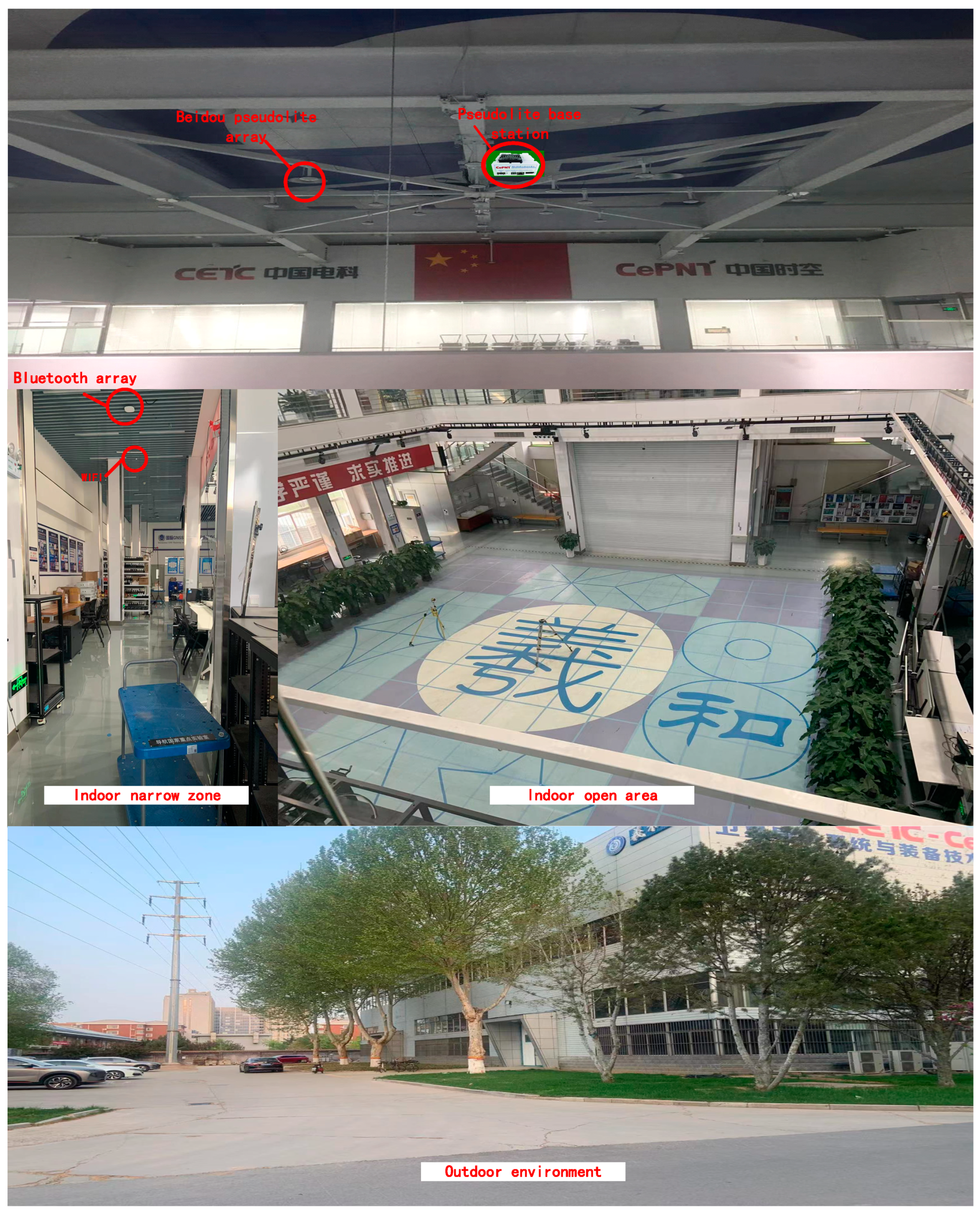
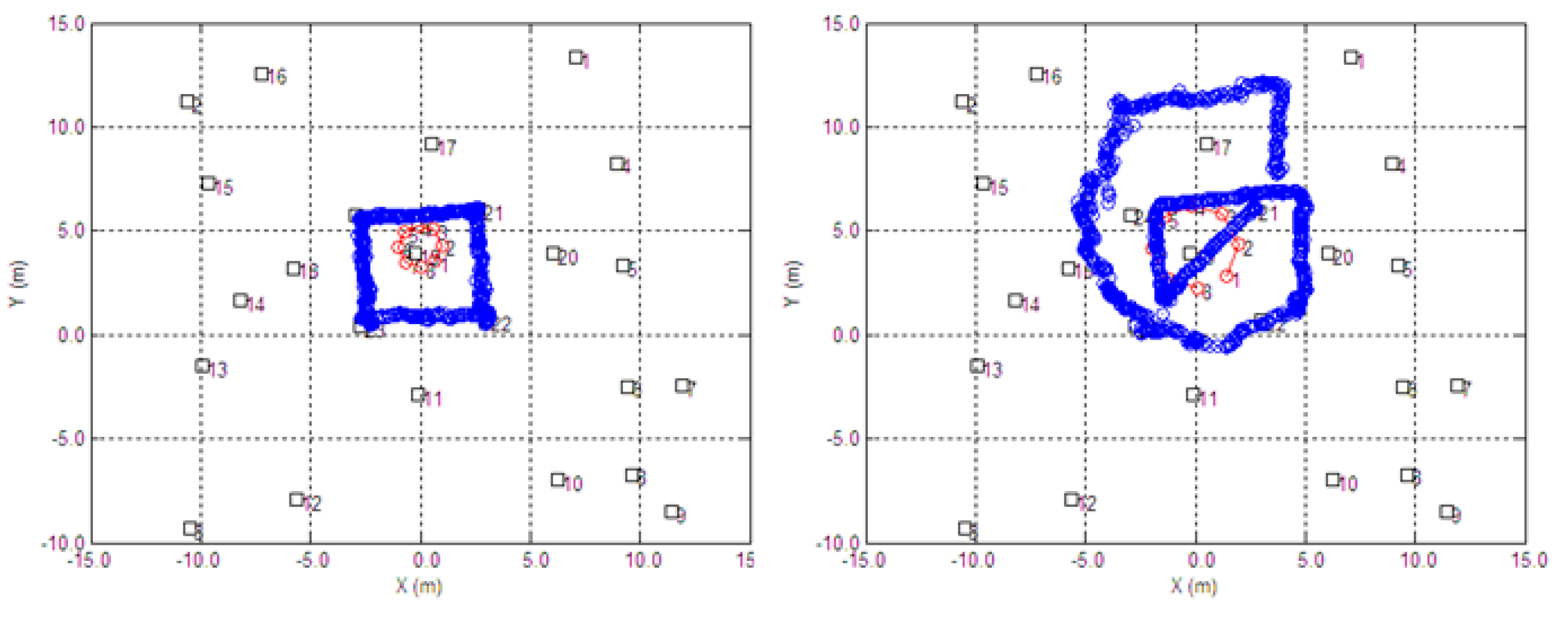
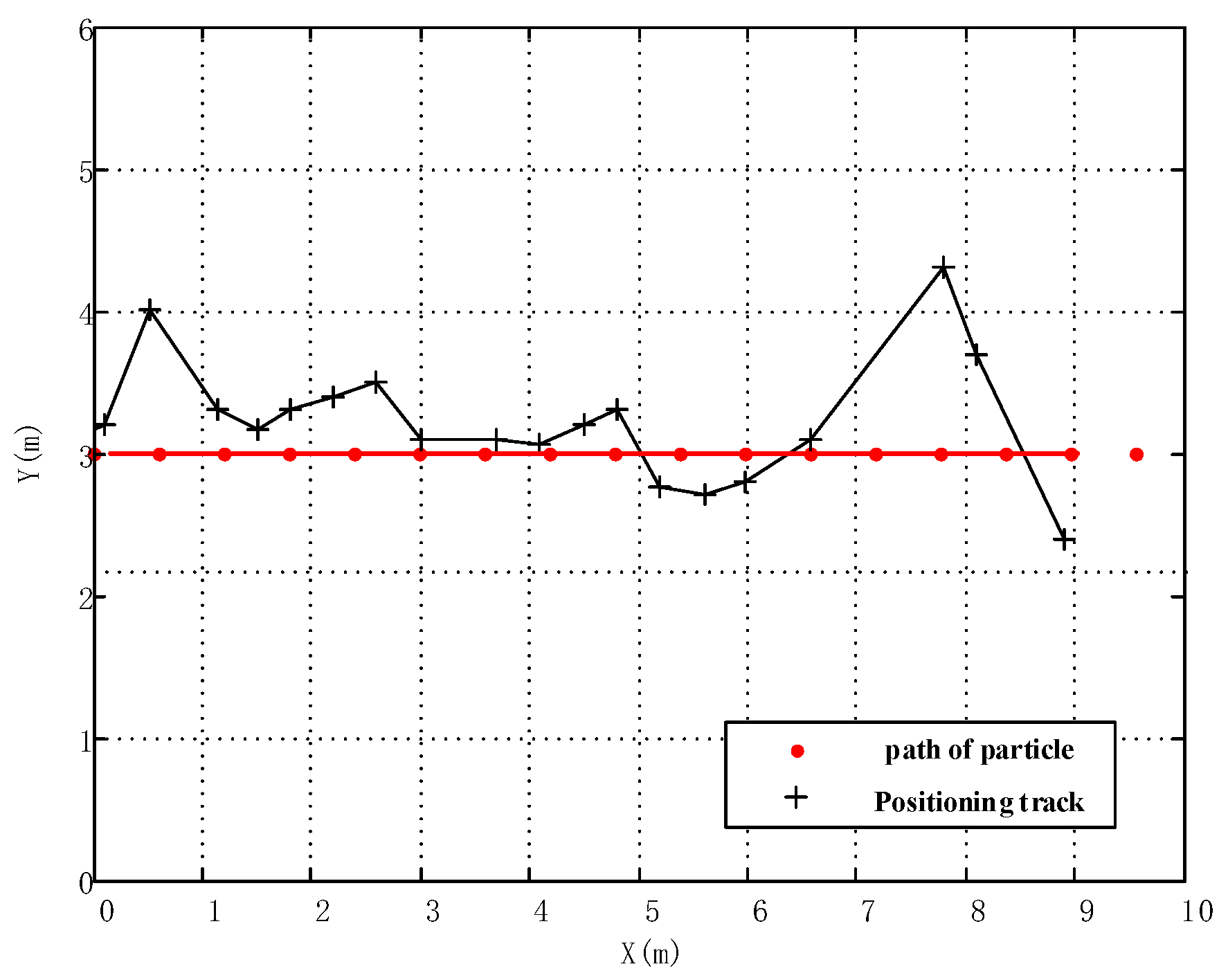
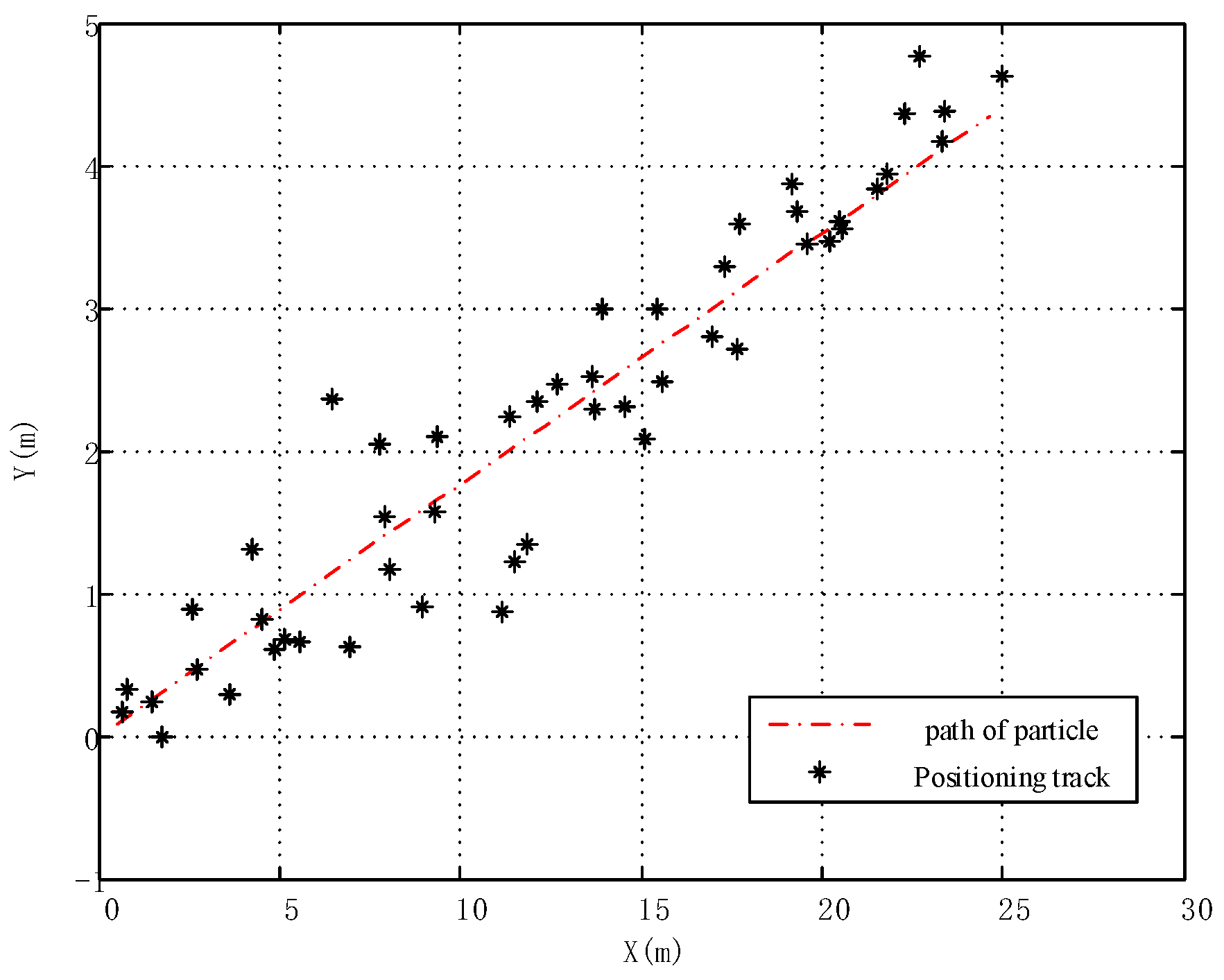
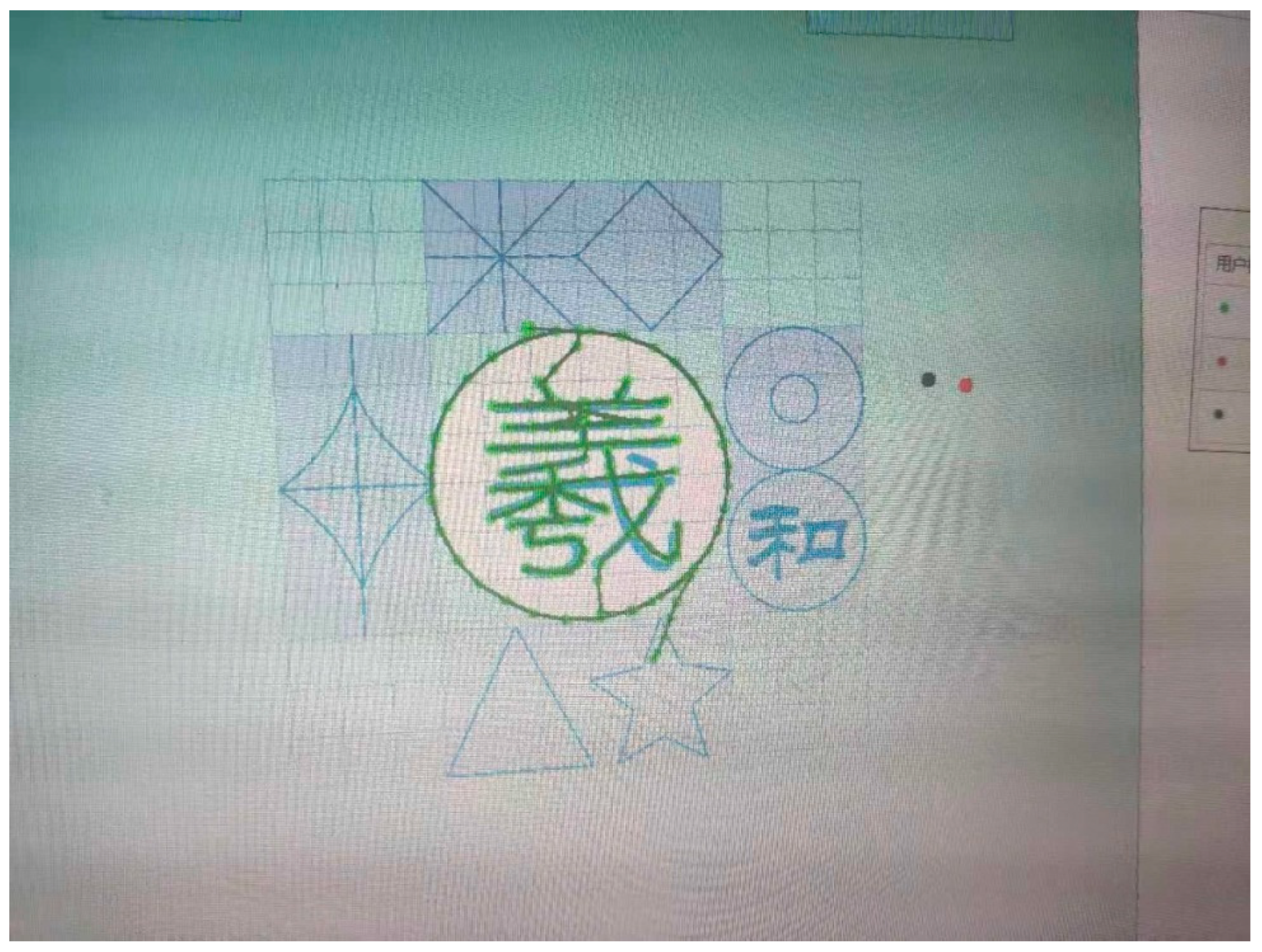
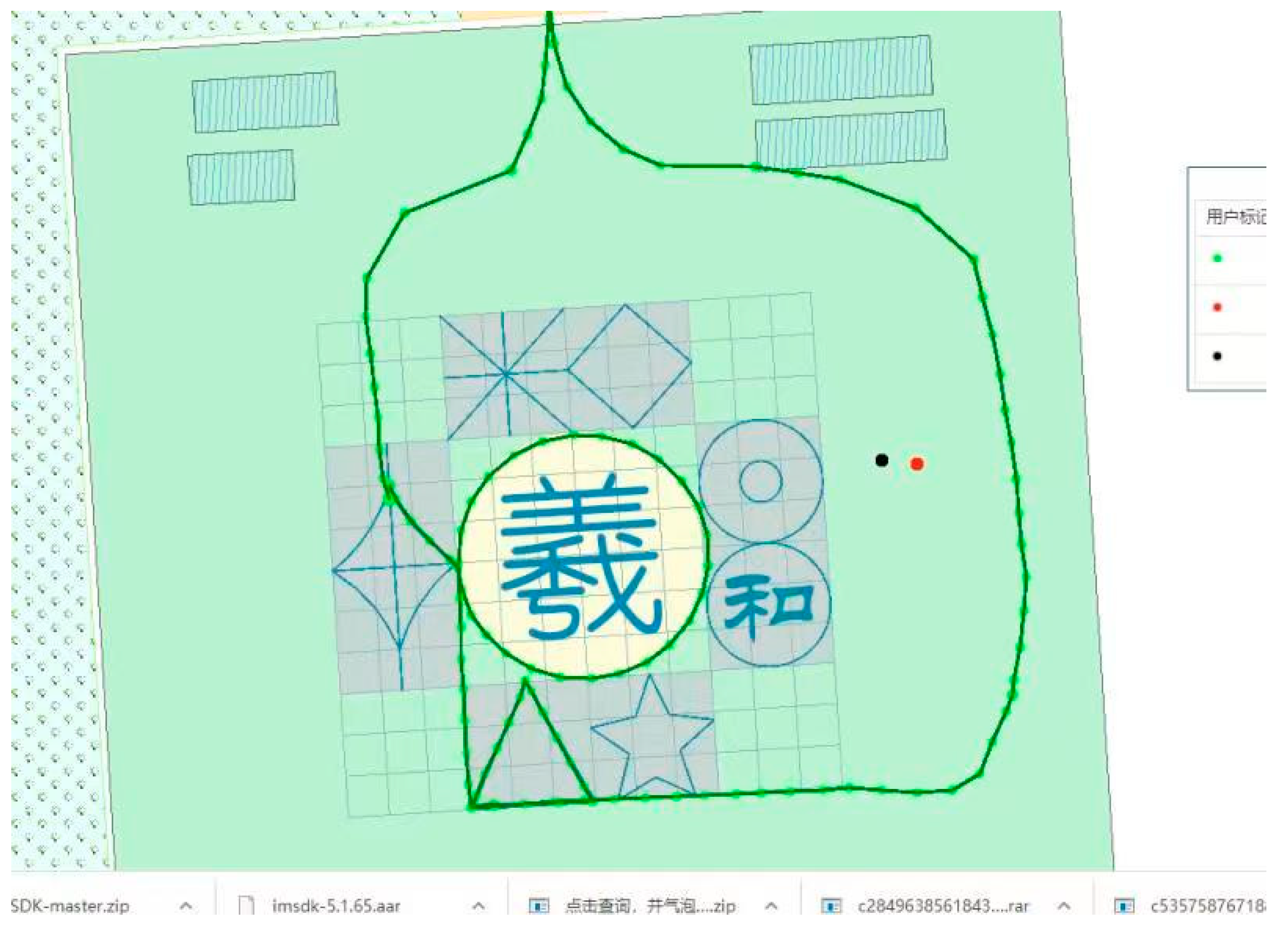
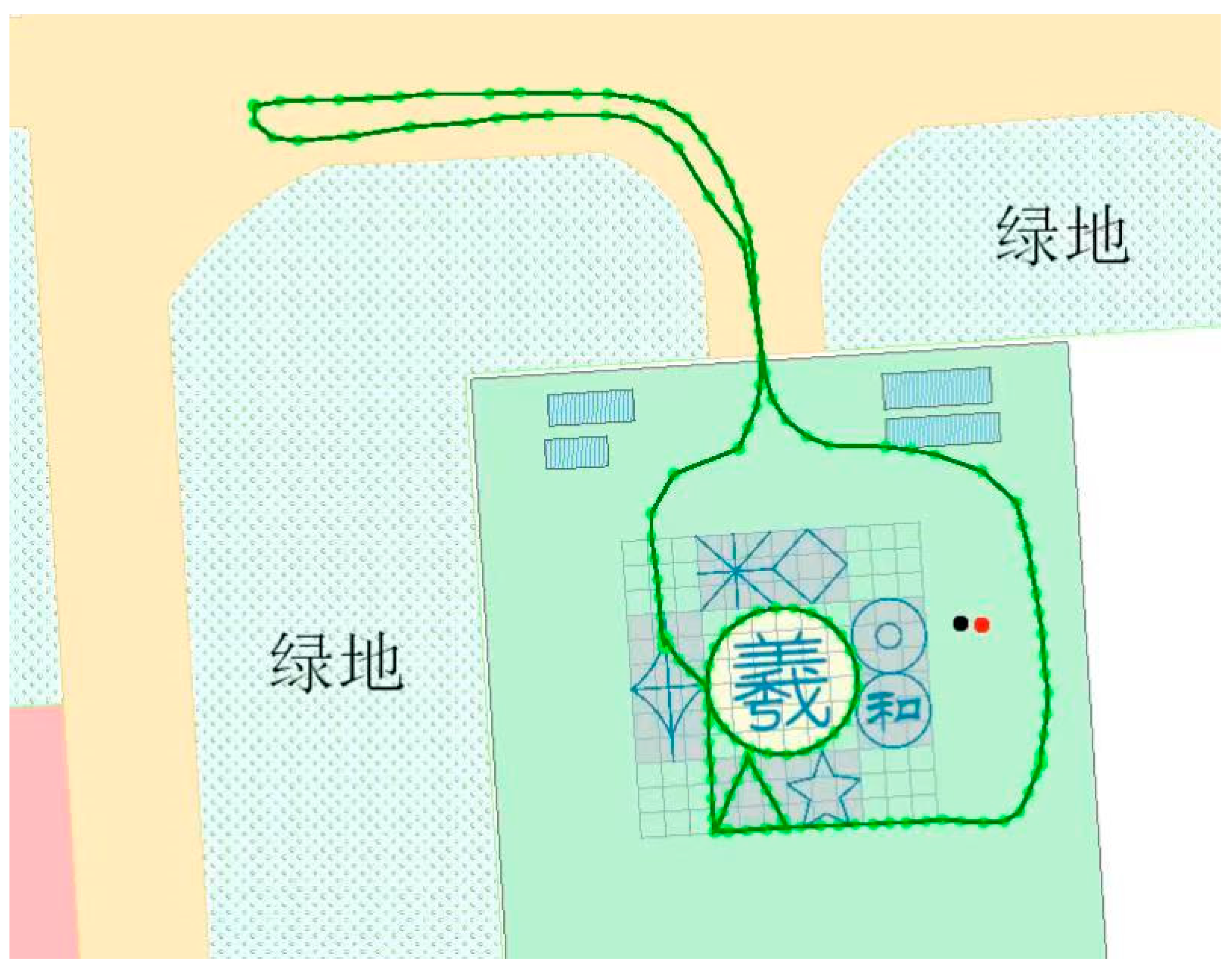
The test environment is built in the artificial intelligence test field of the State Key Laboratory of Satellite Navigation System and Equipment, and the multisource elastic fusion positioning terminal developed by the State Key Laboratory of Satellite Navigation System and Equipment is used to test and verify the positioning performance of the method proposed in this paper. The test results show that the proposed algorithm can solve the problem of seamless navigation and positioning under the condition of indoor and outdoor multiscene switching. The elastic fusion positioning accuracy is better than 0.7 m, and the positioning stability is good. There are no jumps in the positioning results in the three tests.
This paper proposes an algorithm to solve the problem of indoor and outdoor high-precision seamless navigation and positioning continuity. The redundant information of elastic multisource sensors is used to improve the robustness of navigation and positioning in complex and changeable scenes. In the future, it can be applied to positioning and navigation, personnel management, safety rescue and other aspects in complex urban scenes, promote the all-round development of the indoor positioning blue ocean market and finally realize the seamless integration of the indoor and outdoor interconnection of all things.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}