
A Multi-Service Adaptive Semi-Persistent LTE Uplink Scheduler for Low Power M2M Devices




Abstract
:1. Introduction
- Design of a system model which offers different capacities to multi-service M2M traffic classes with variable burst sizes and packet delay budgets.
- Introduction of a control mechanism to vary the semi-persistent period according to the required QoS for different adaptive allocation policies.
- Pre-emption of low priority traffic (can be served dynamically in a best-effort way) upon arrival of higher priority traffic with more stringent delay budgets.
- Reduction in power consumption of M2M UEs with DRX-enabled adaptive SPS mechanism without compromising their QoS requirements.
2. Background
2.1. Related Enhancements for M2M Communications
2.2. Dynamic Scheduling in LTE
2.3. Adaptive Semi-Persistent Scheduling (SPS)
3. Multi-Service Adaptive Semi-Persistent Scheduling Algorithm
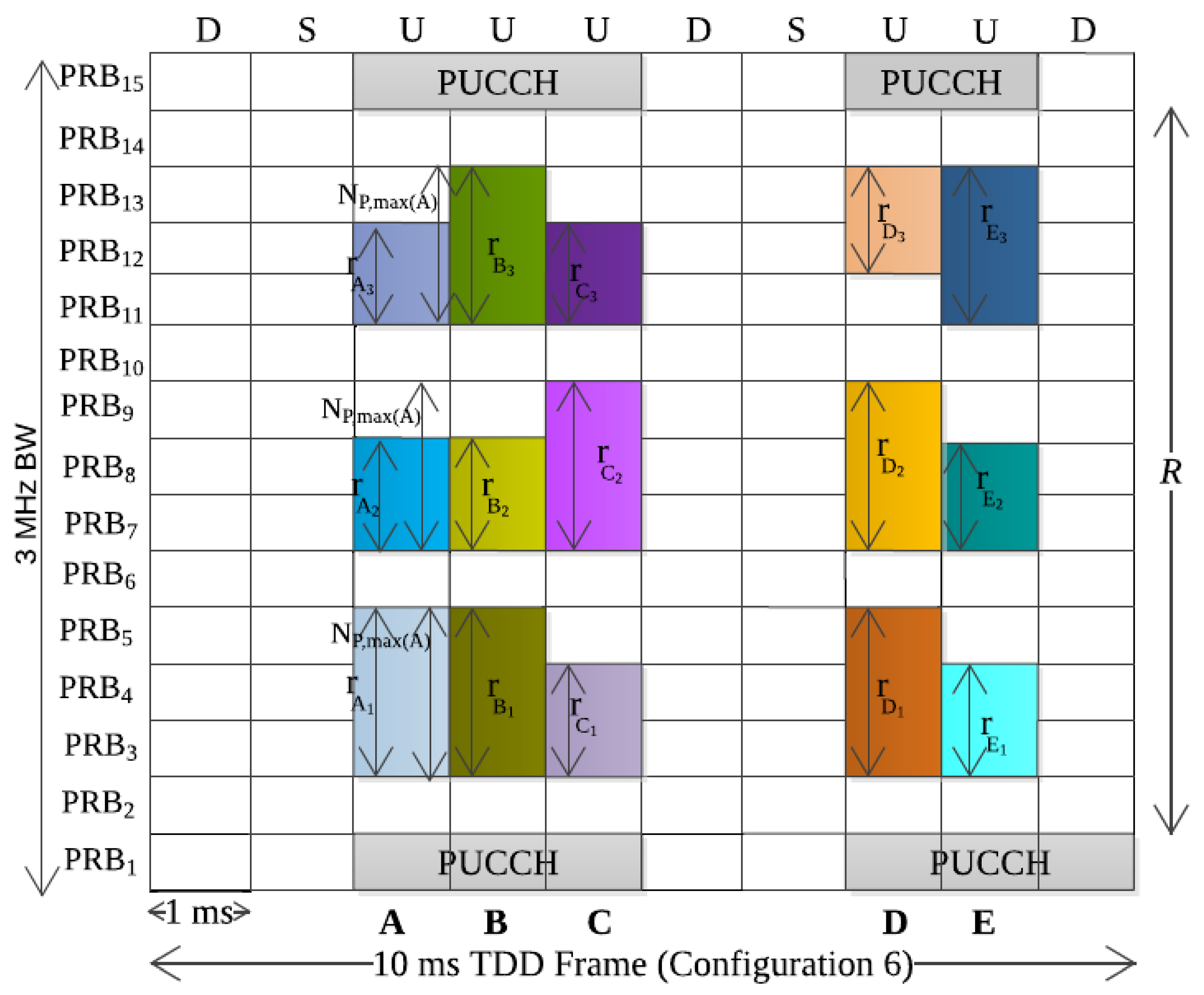
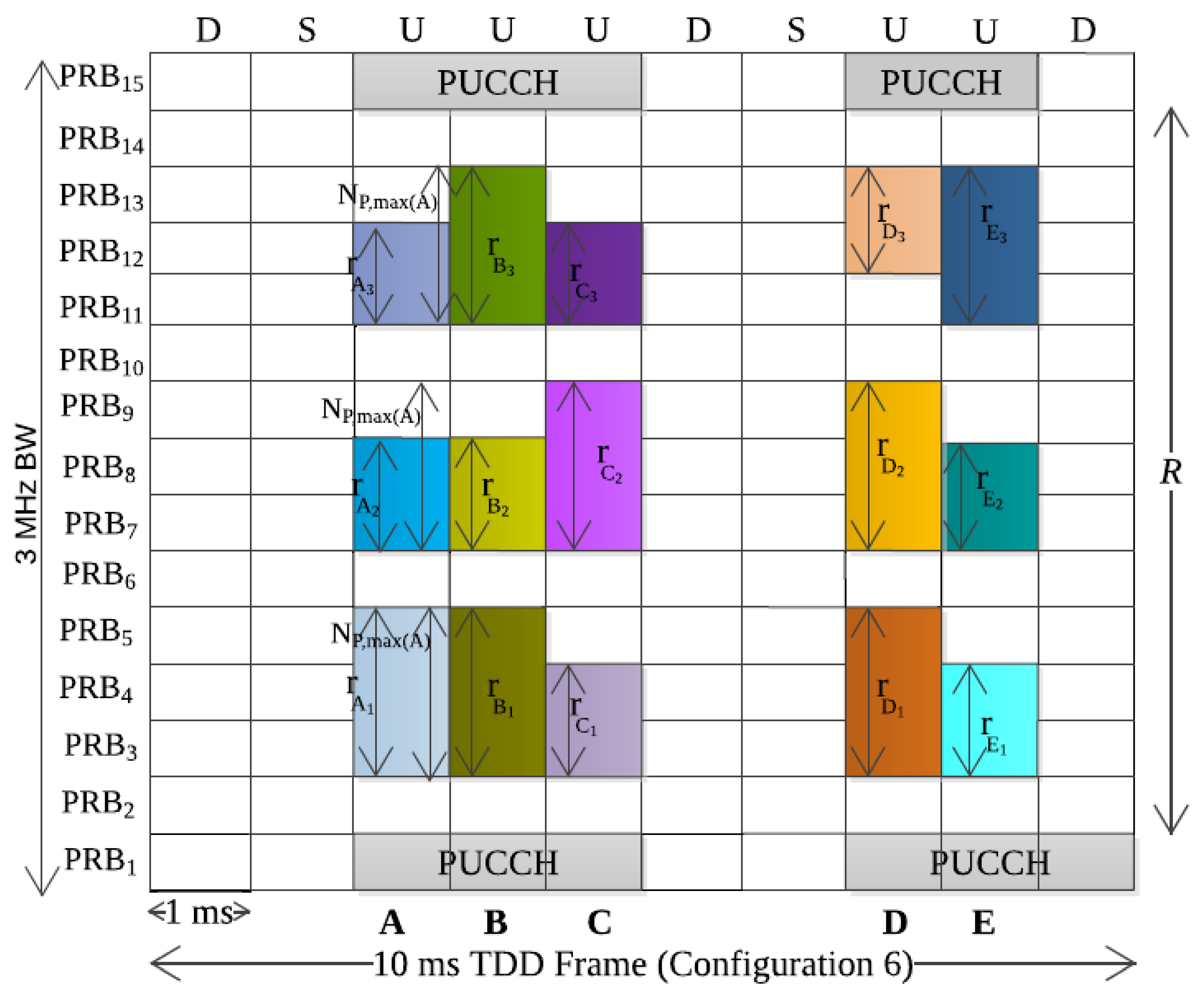
3.1. Adaptive Frequency Domain Scheduling
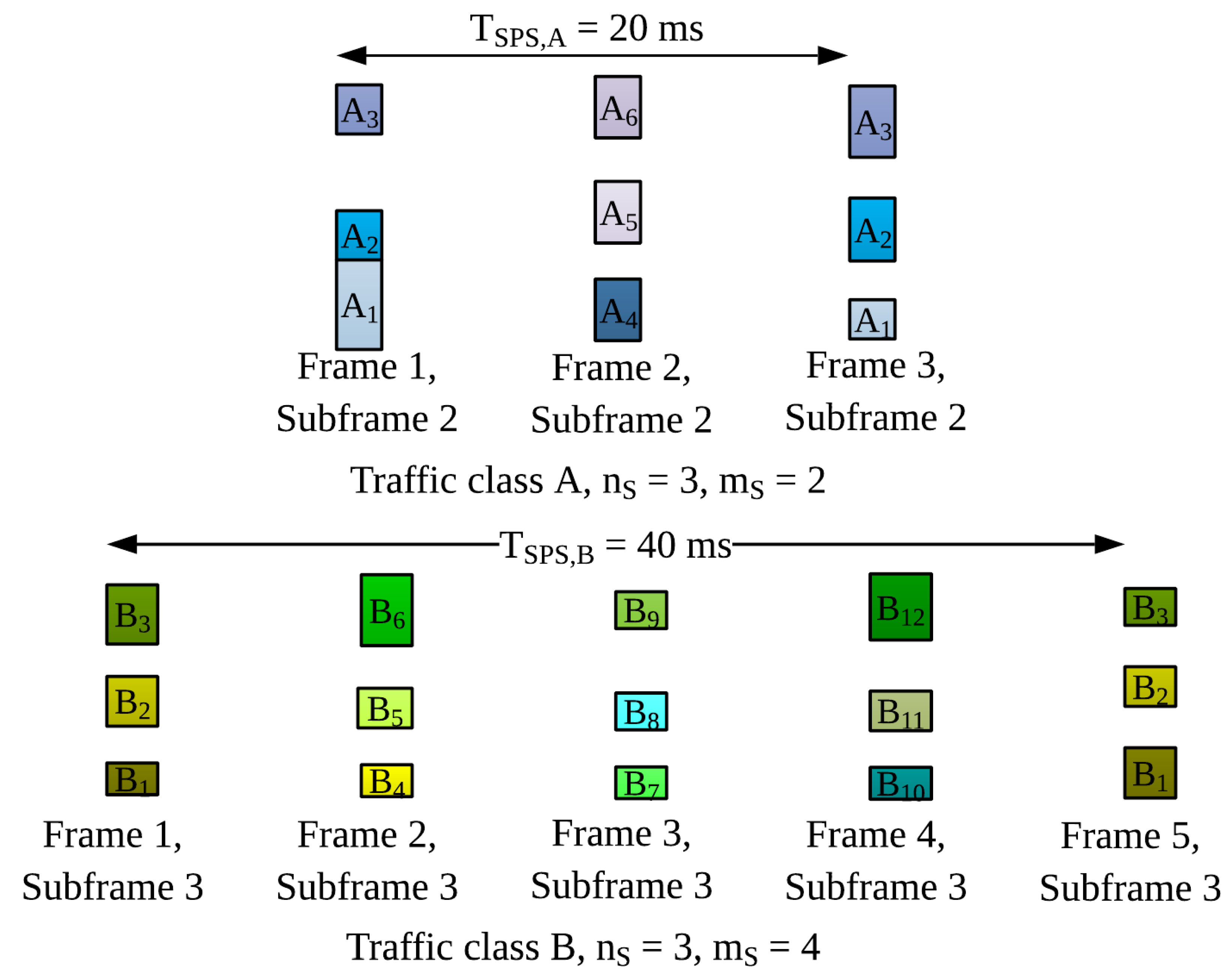
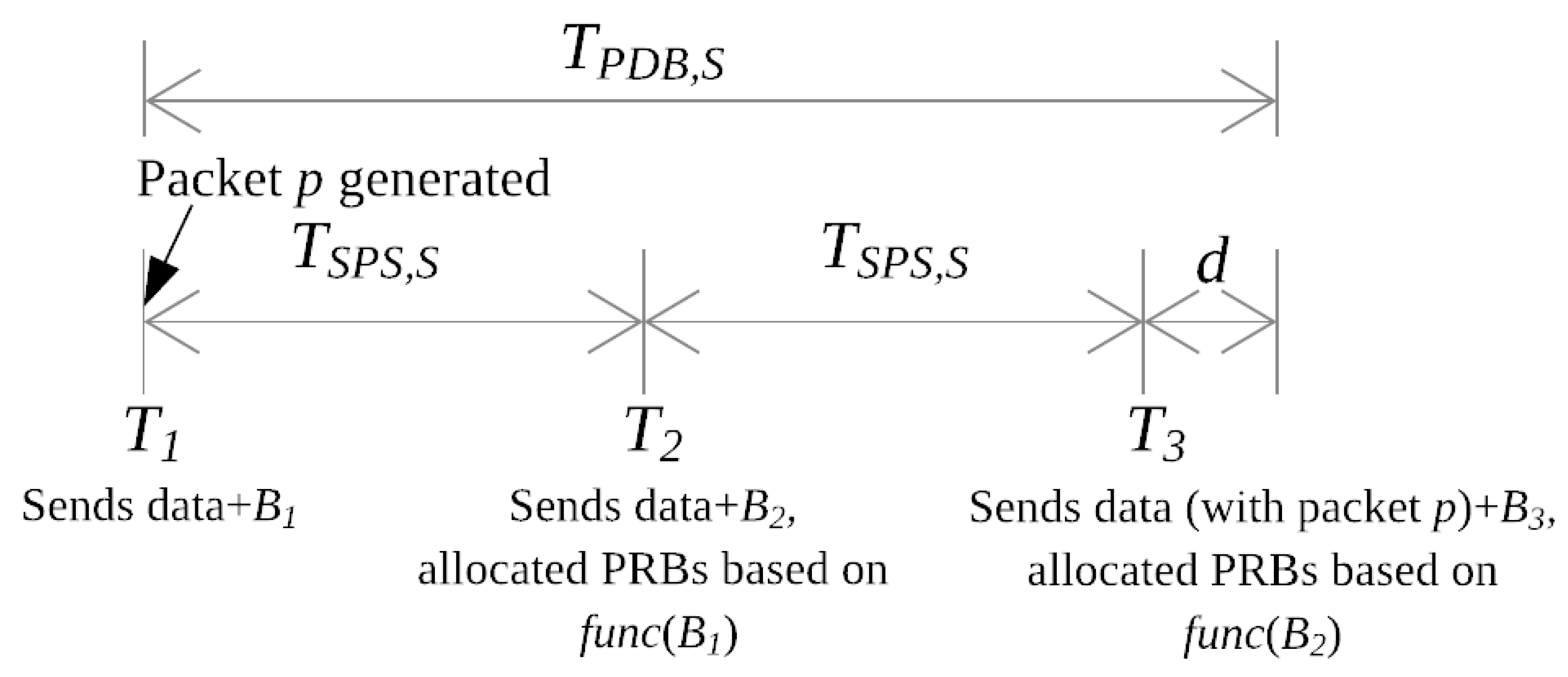
3.2. Control Mechanism for the Adaptive SPS Period
- is an integer number.
- is the LTE frame duration, fixed at [29].
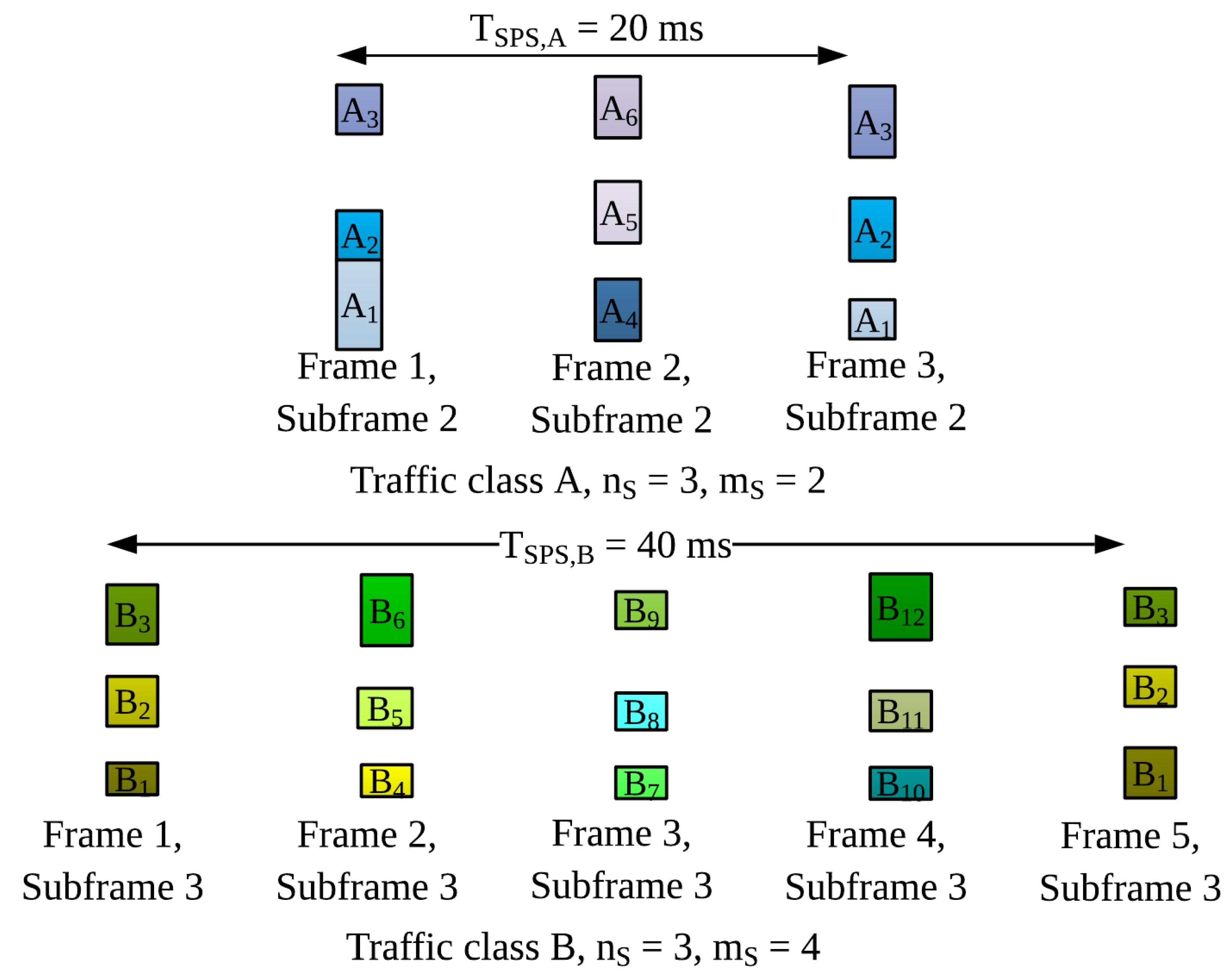
3.3. Intra-Class Time and Frequency Domain Multiplexing
3.4. Scheduling of H2H Traffic
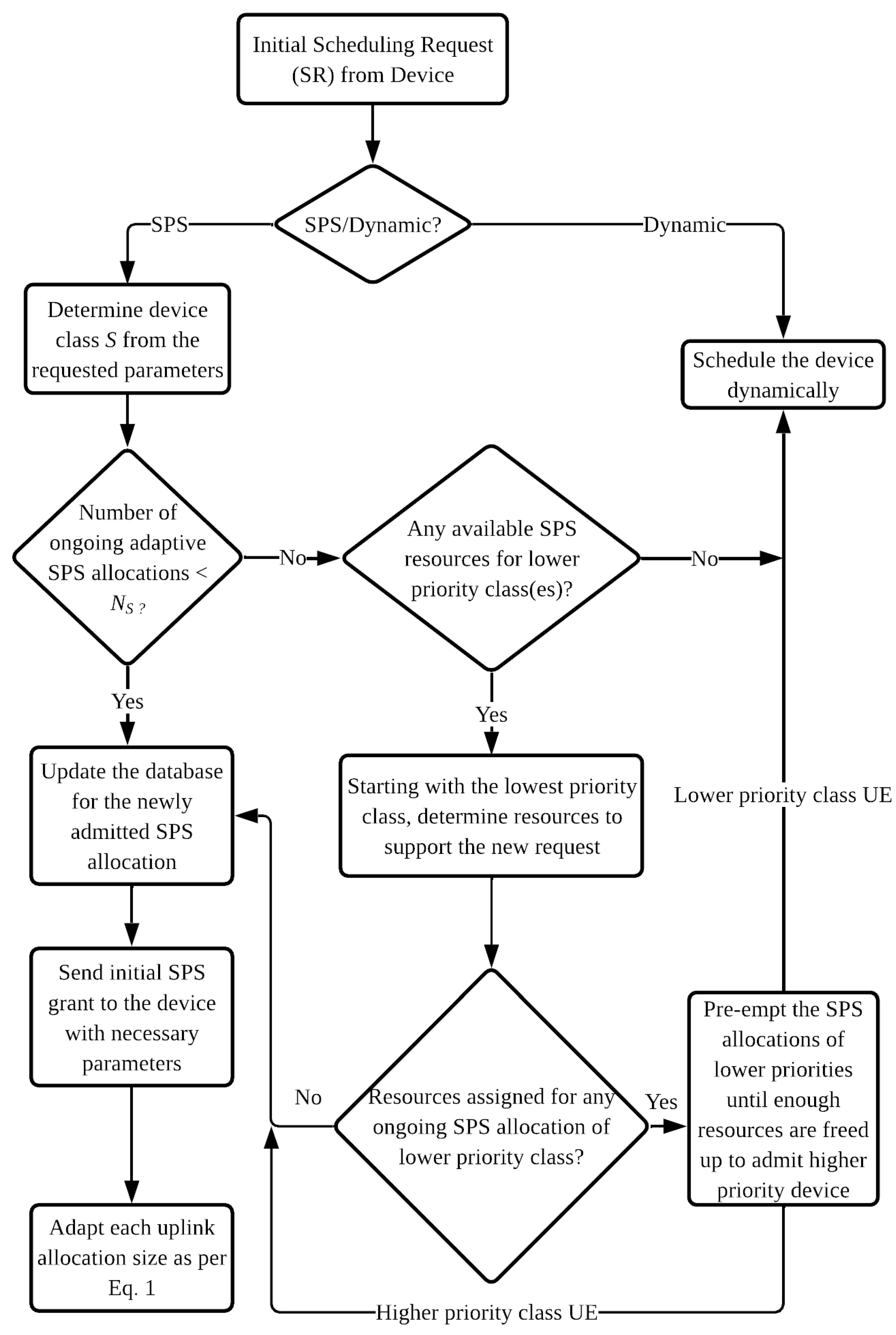
3.5. Multi-Service Adaptive SPS Algorithm
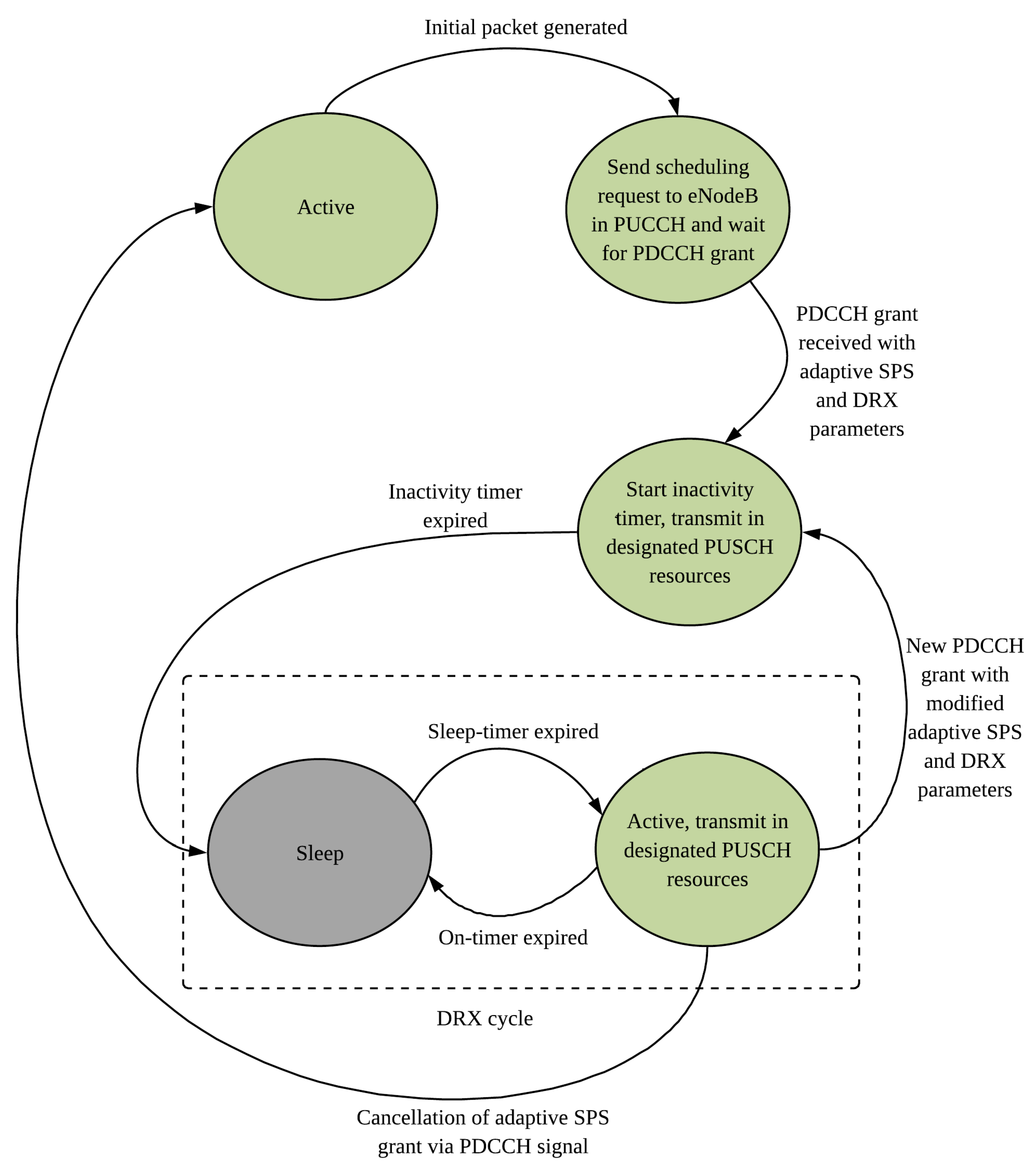
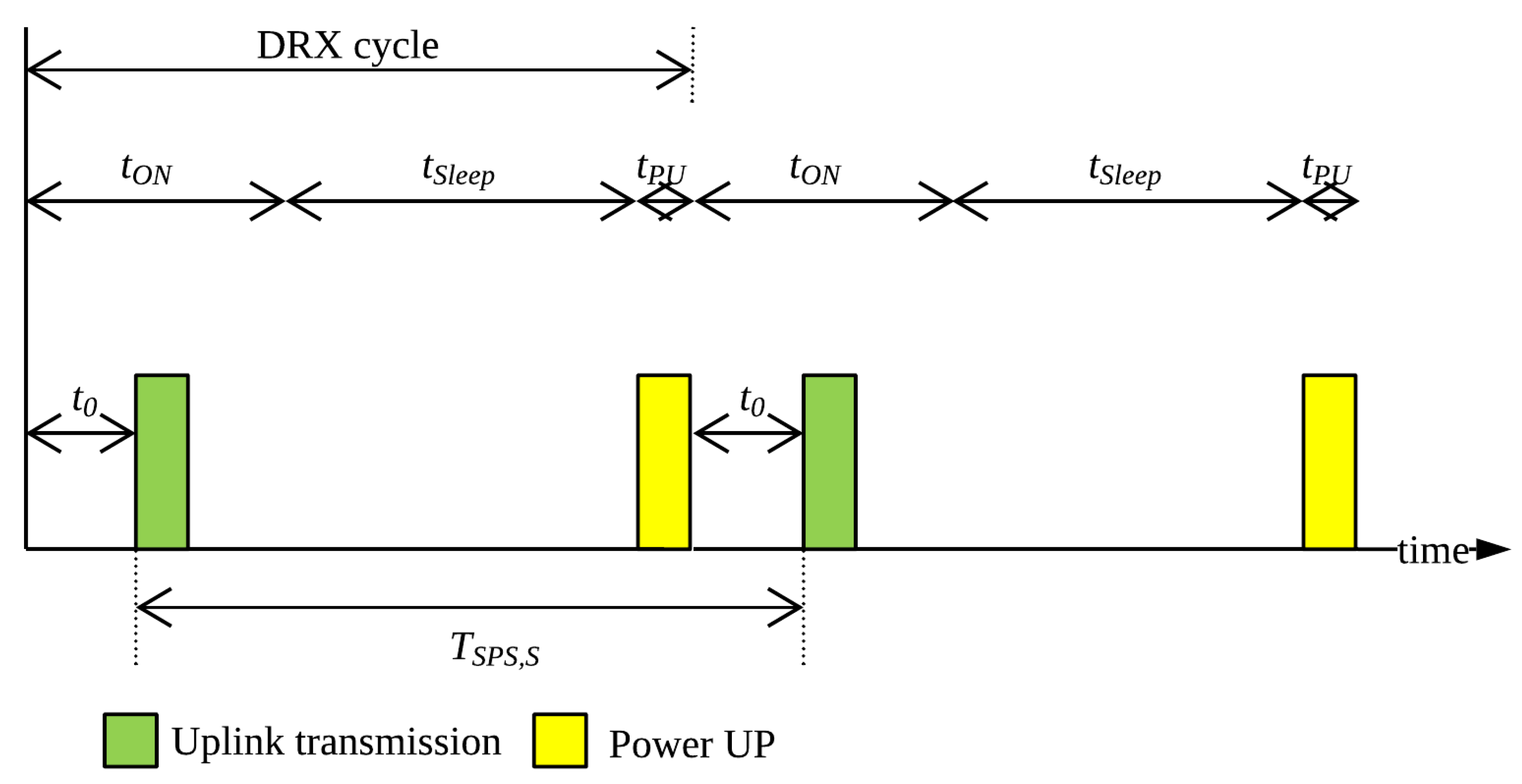
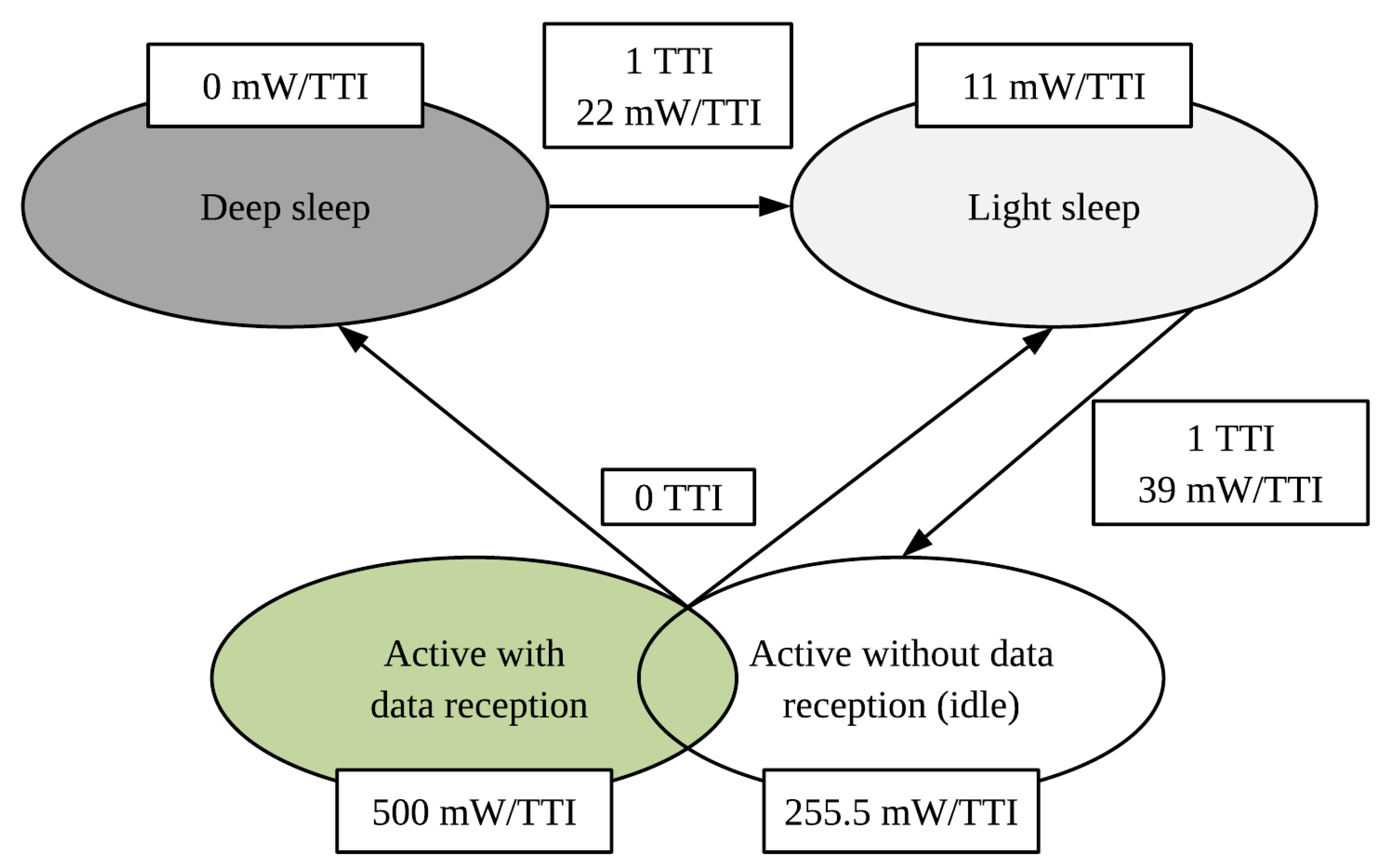
4. Implementation of DRX Power Savings with Adaptive SPS
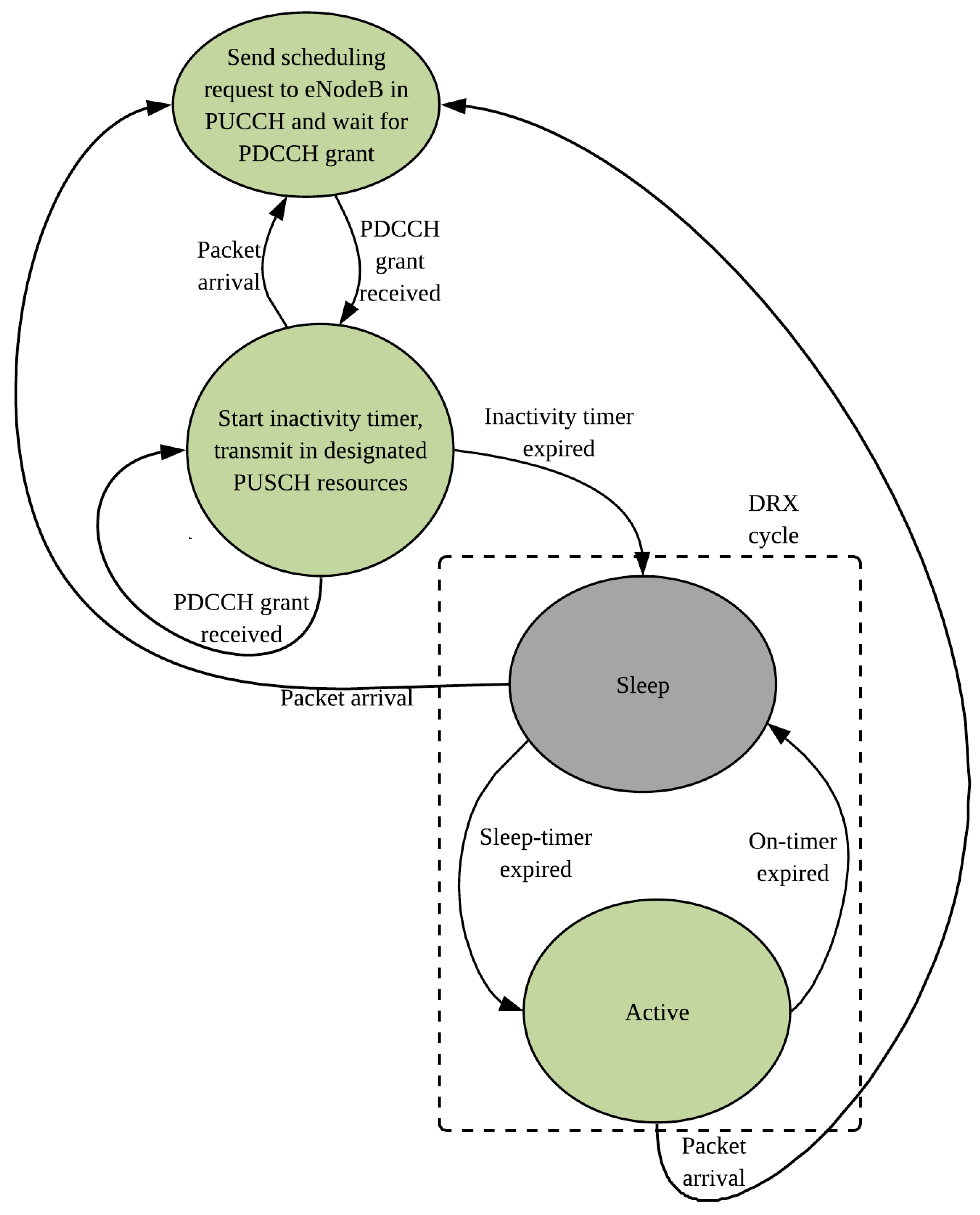
4.1. Standard DRX Mechanism
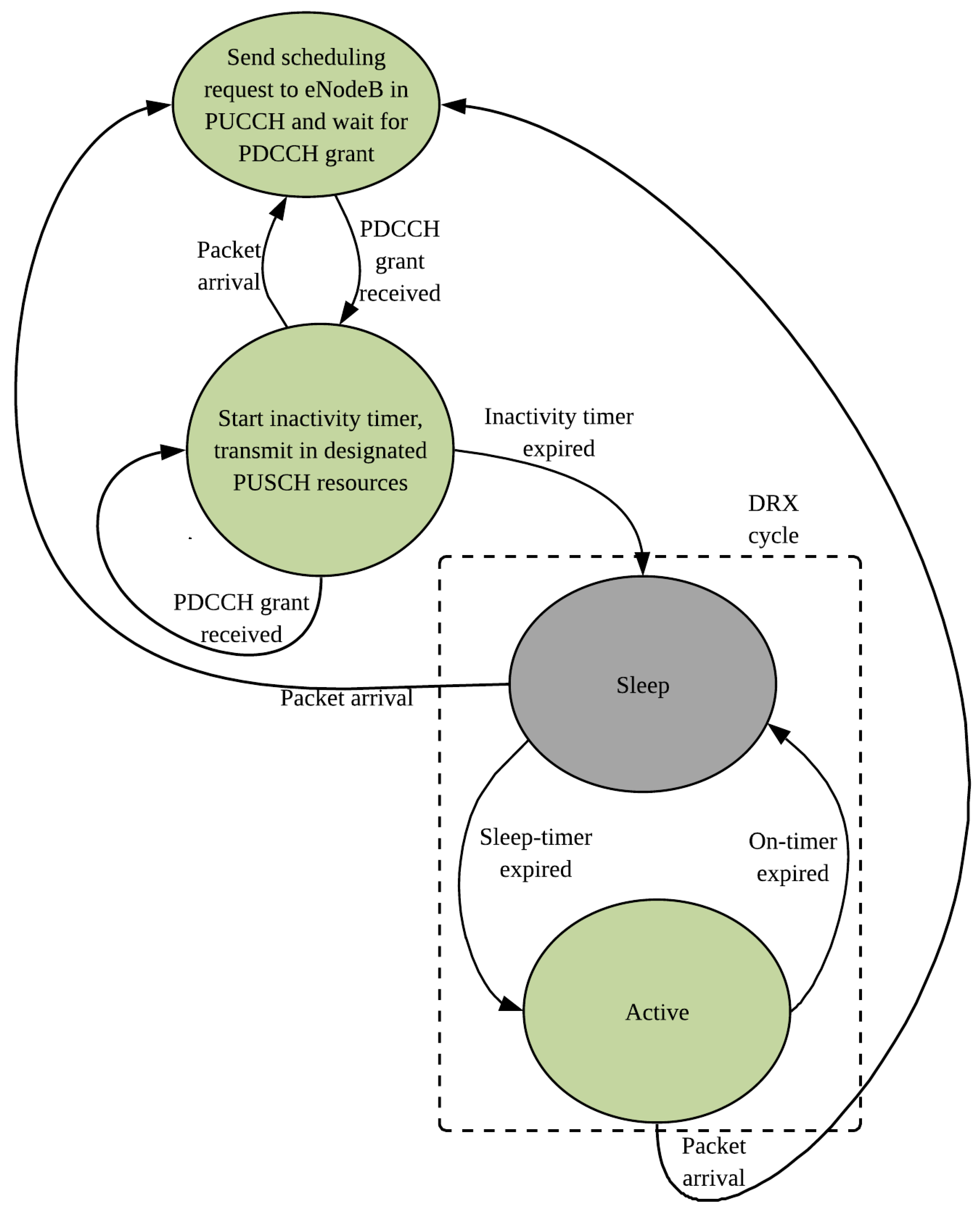
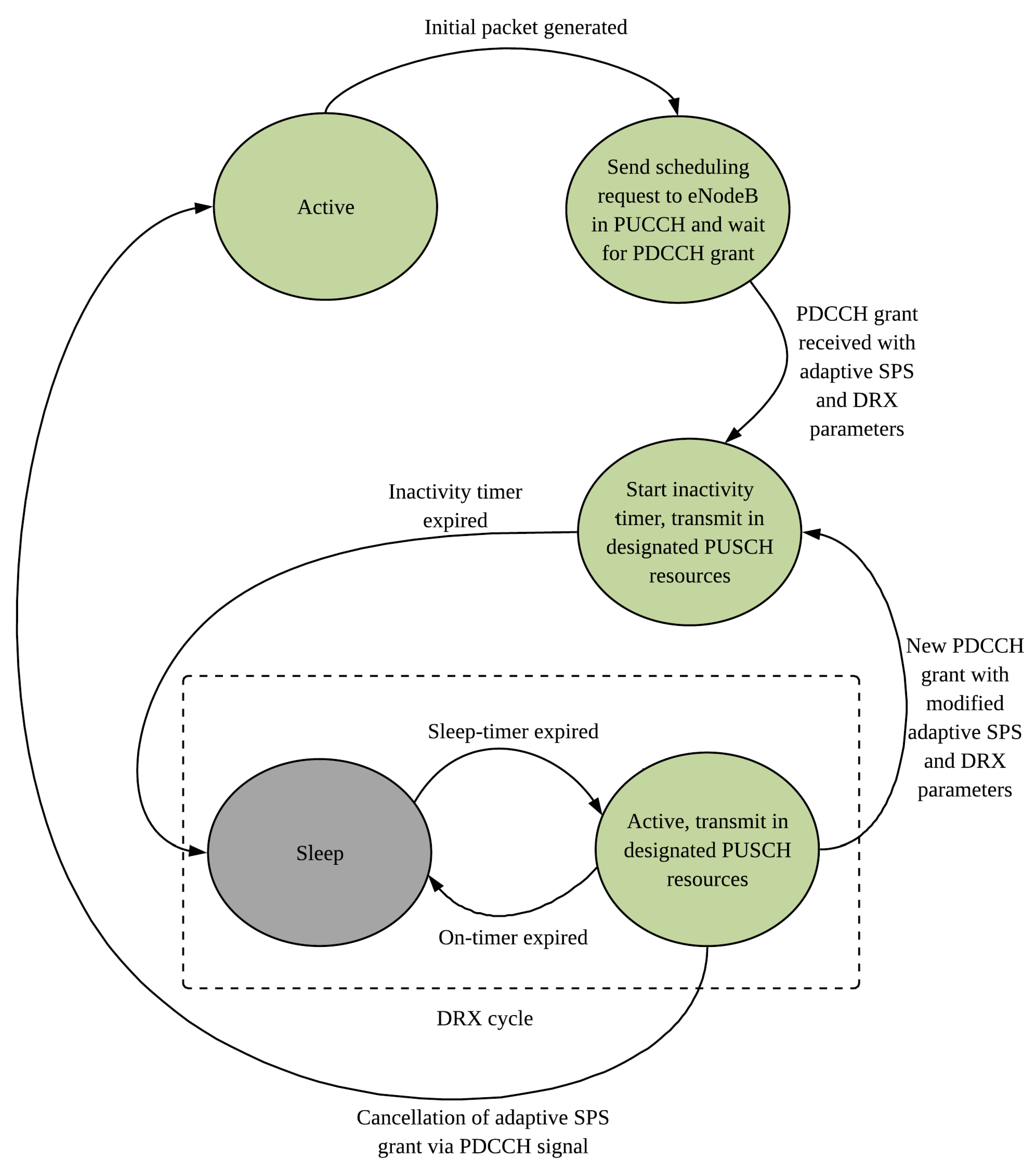
4.2. UE State Transitions with Adaptive SPS
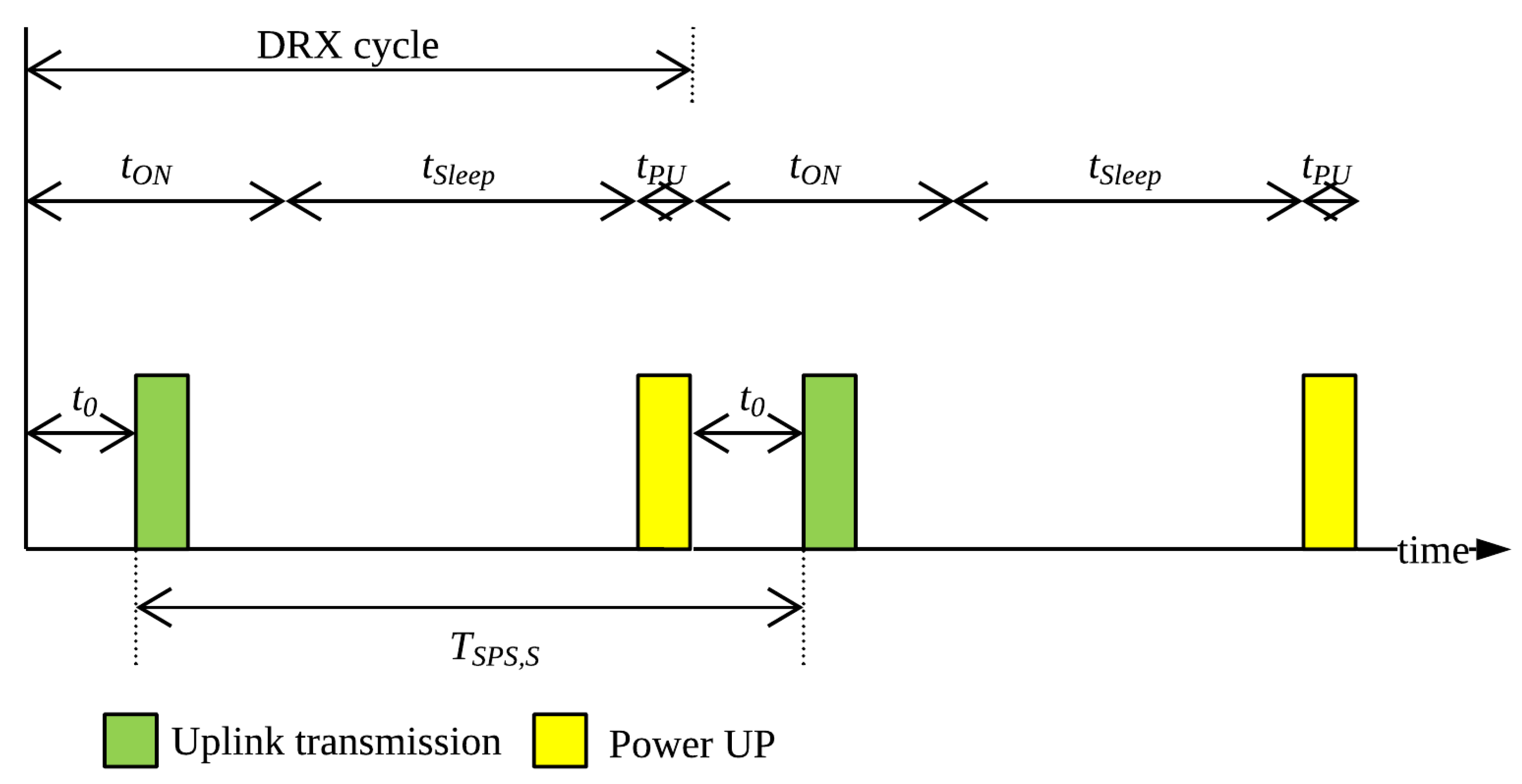
4.3. Sleep Period and Power Saving
4.4. Power Saving through Predictive Allocation
5. Simulation Parameters
6. Results
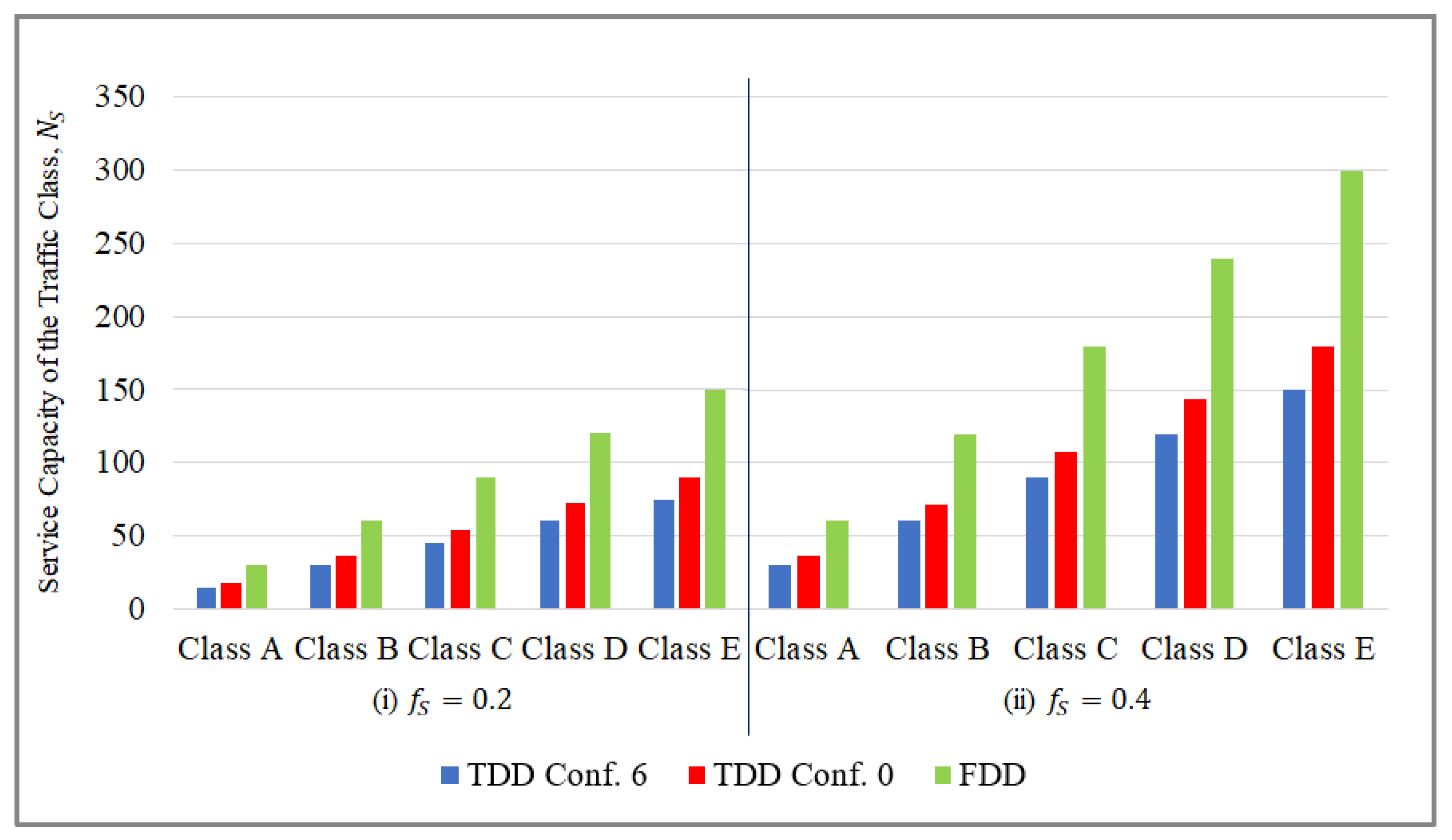
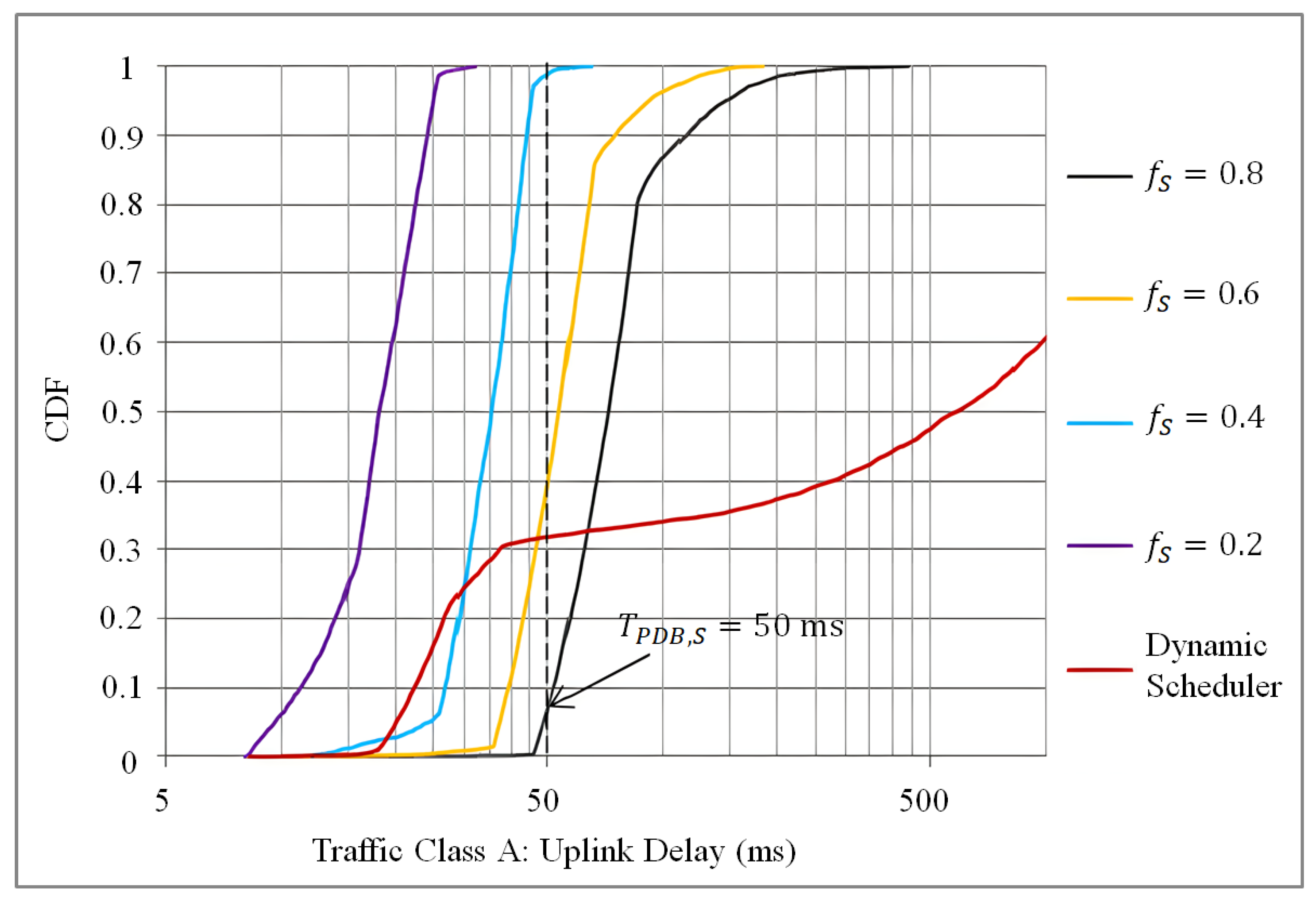
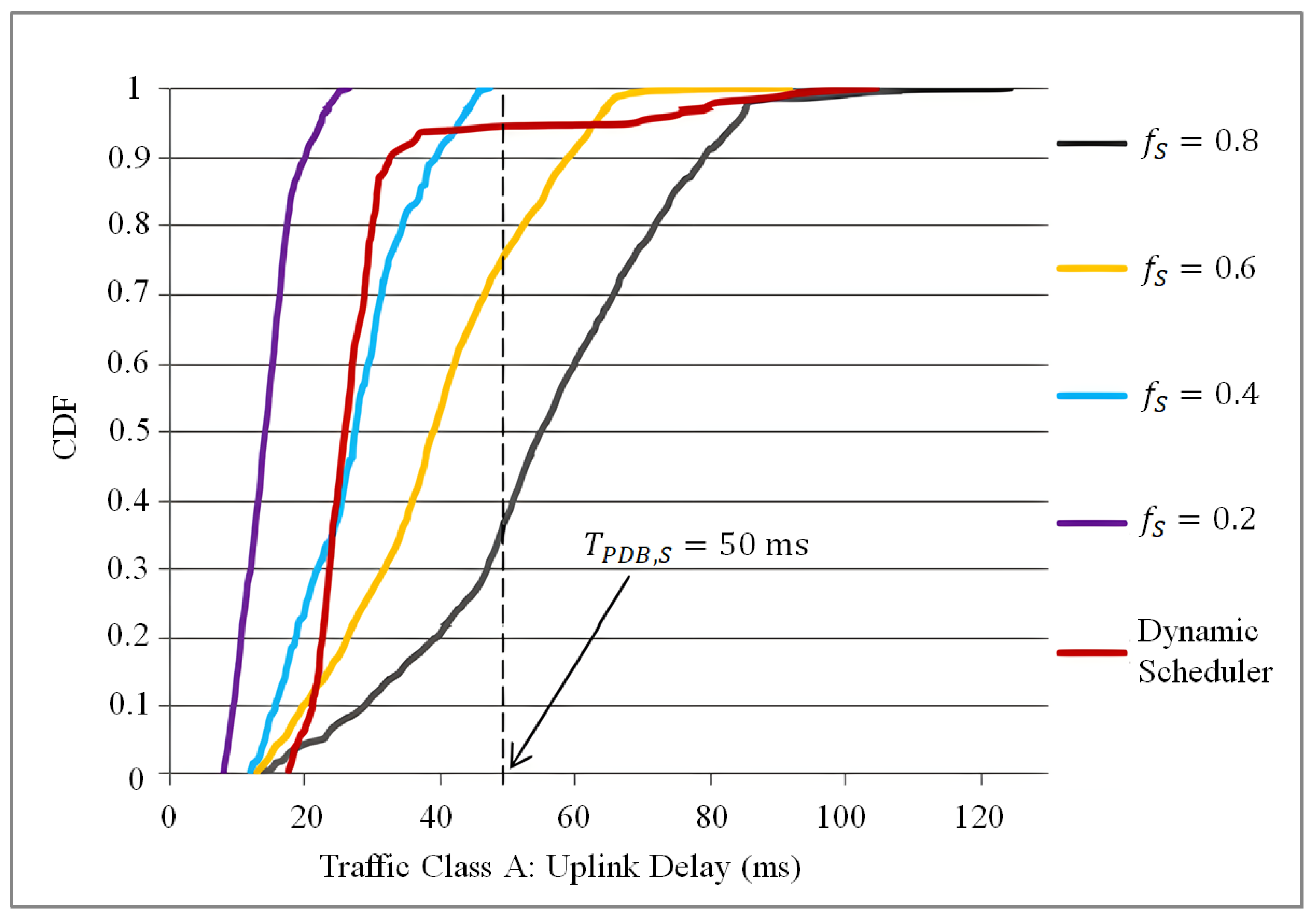
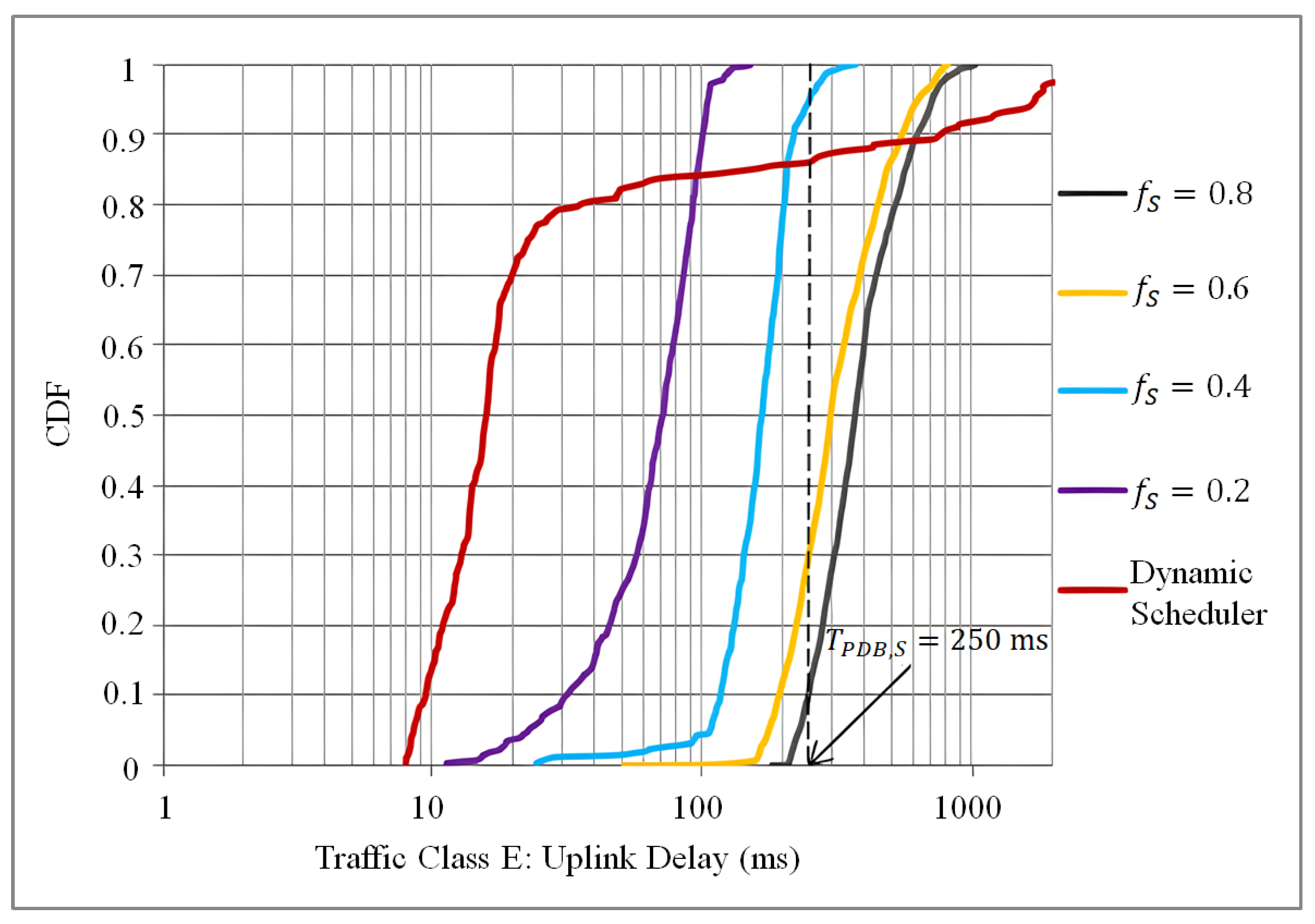
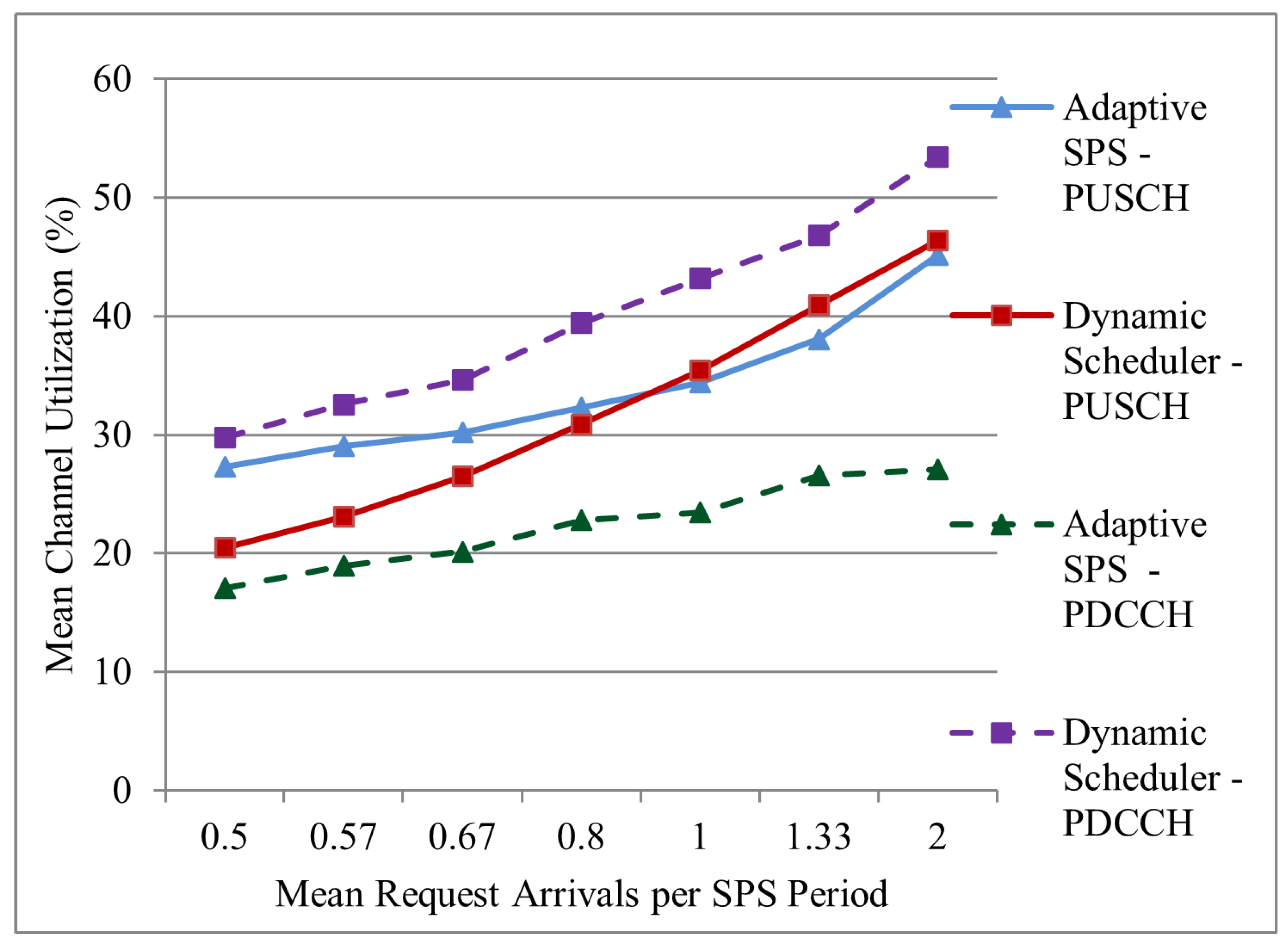
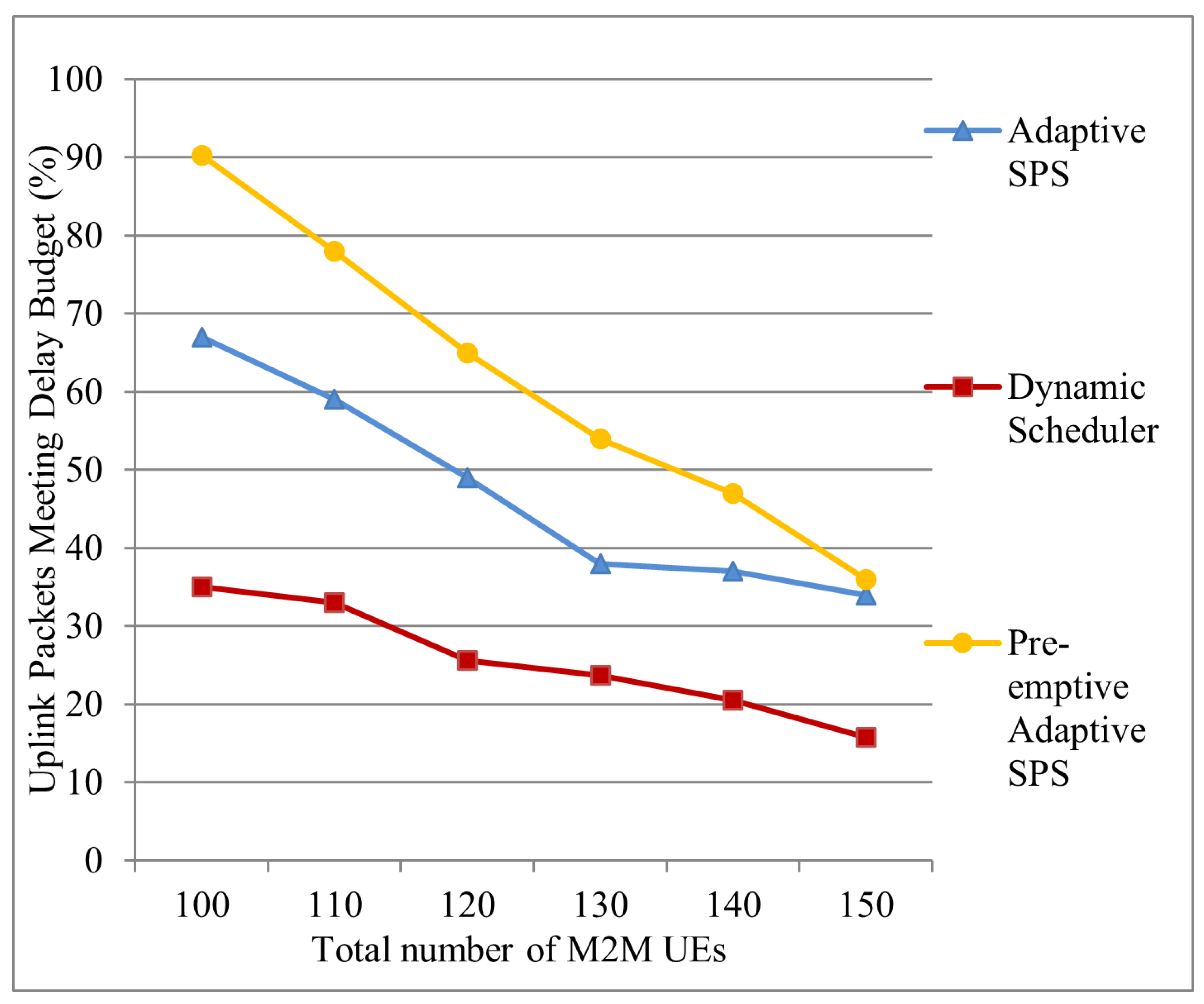
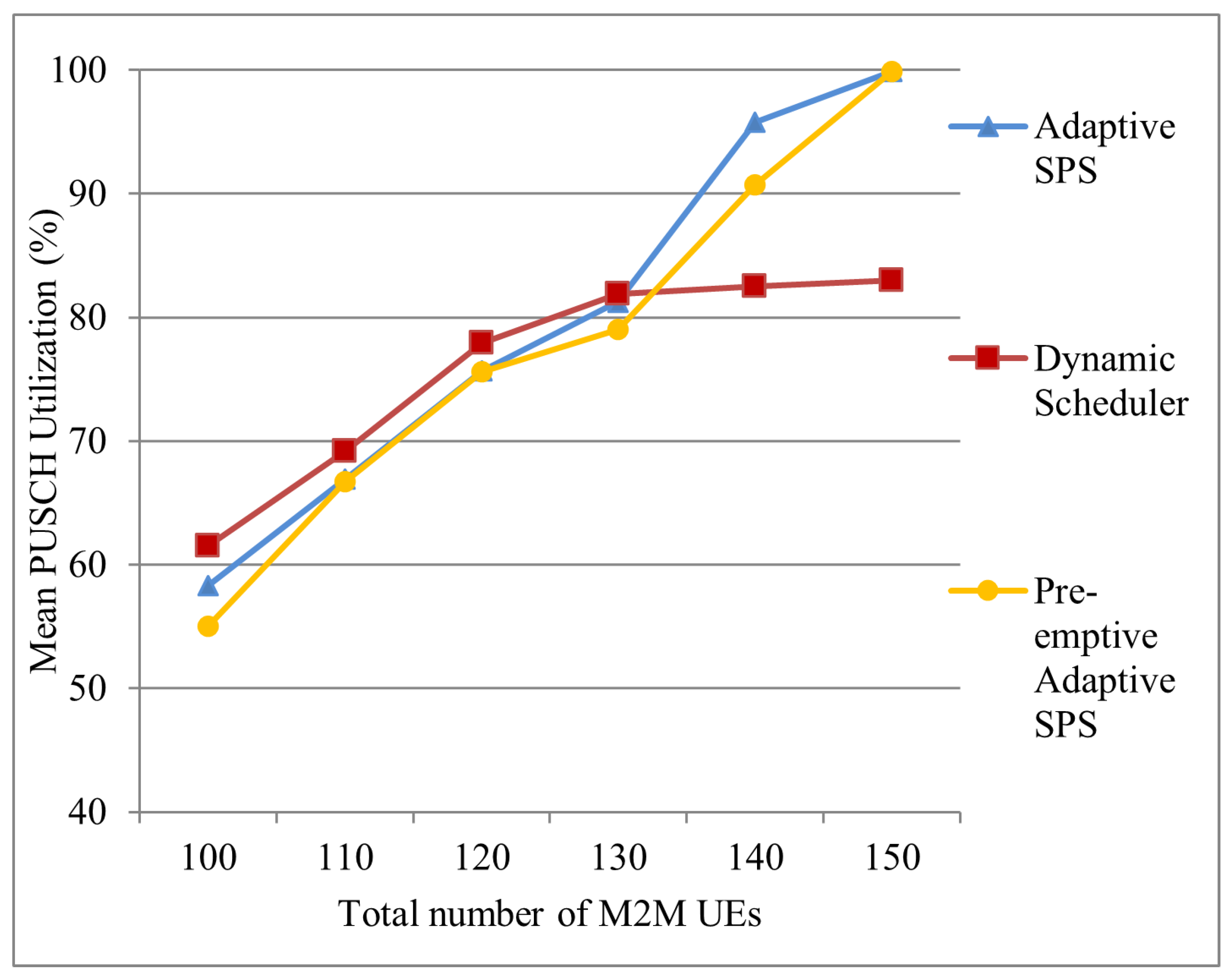
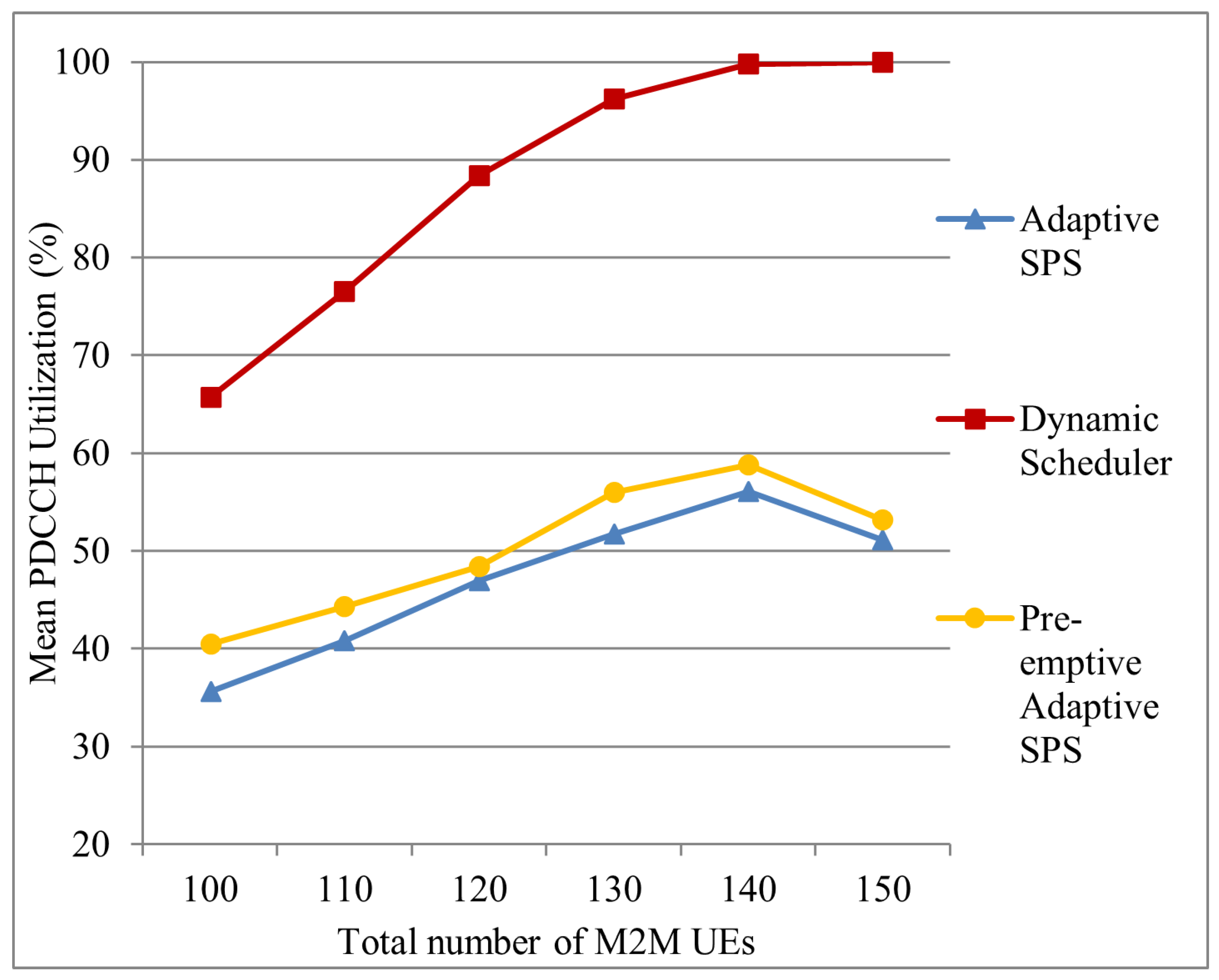
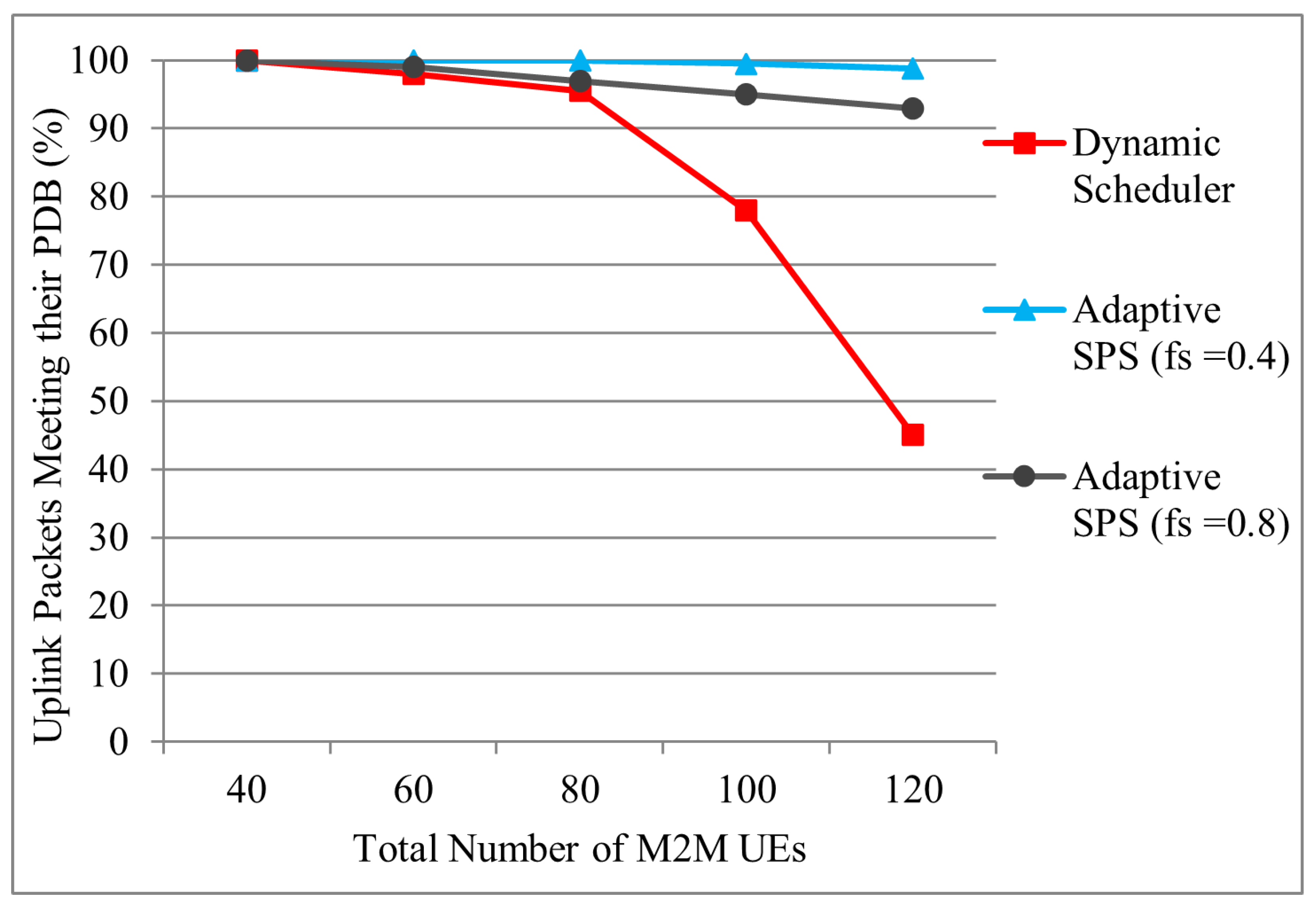
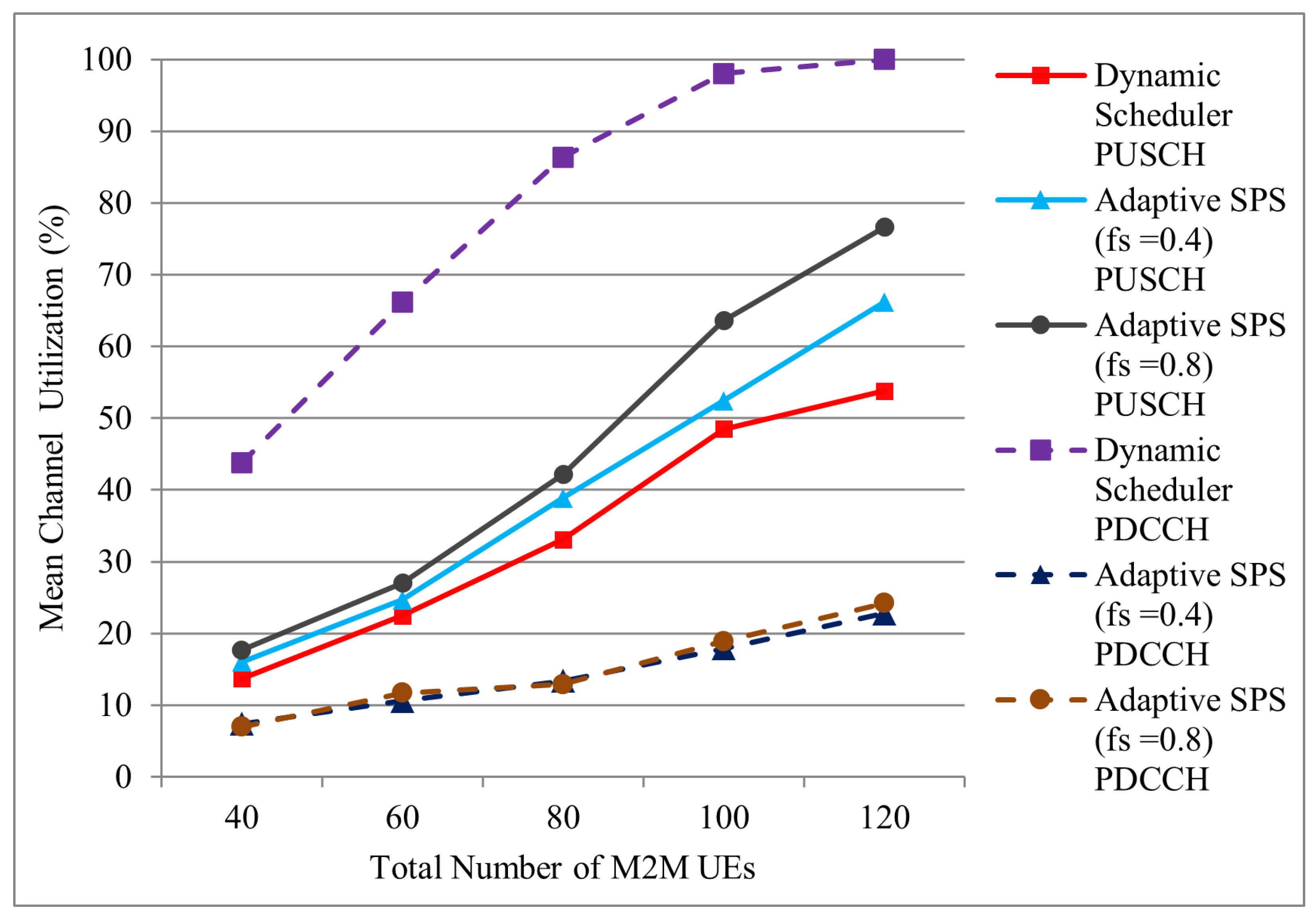
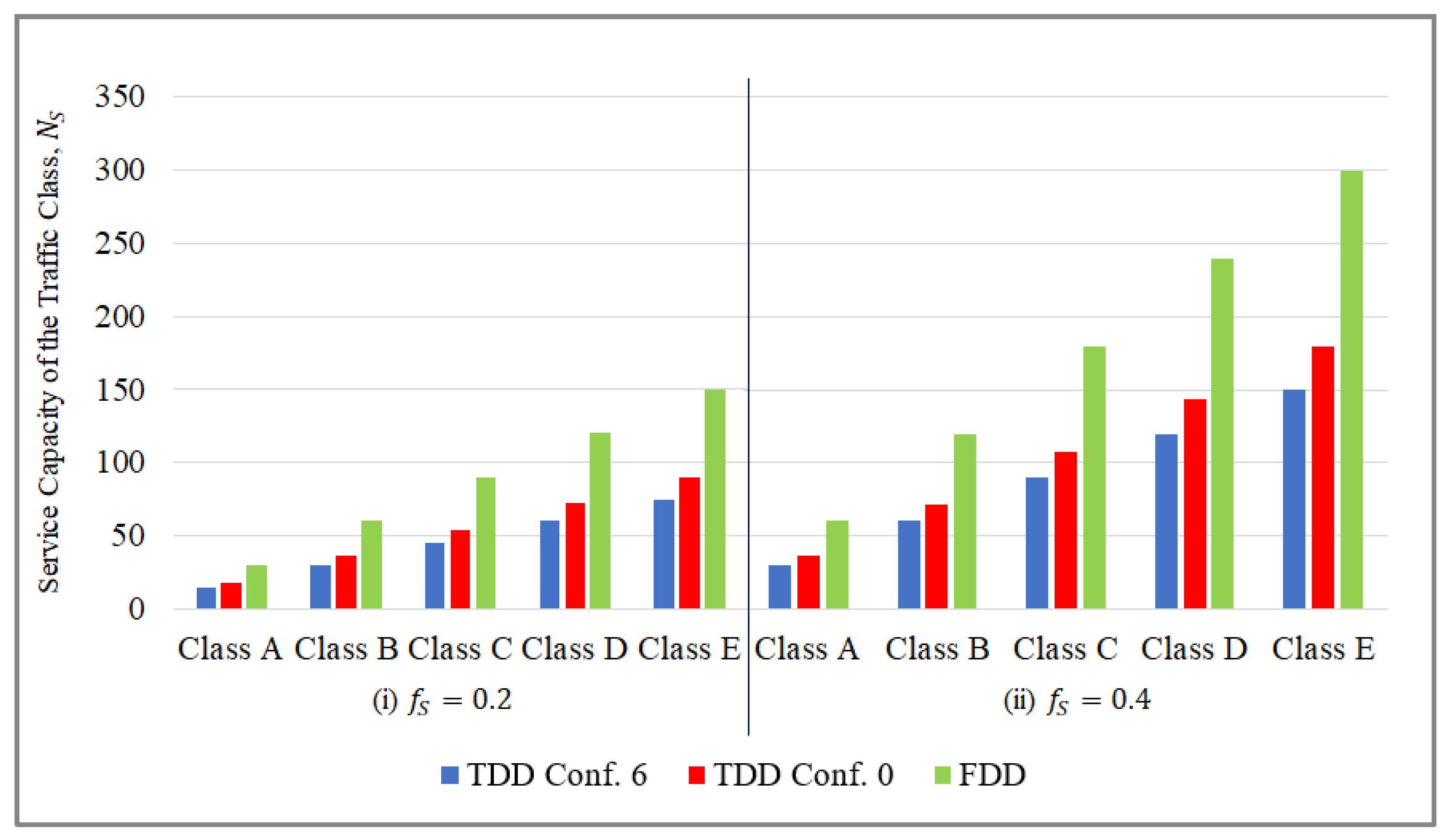
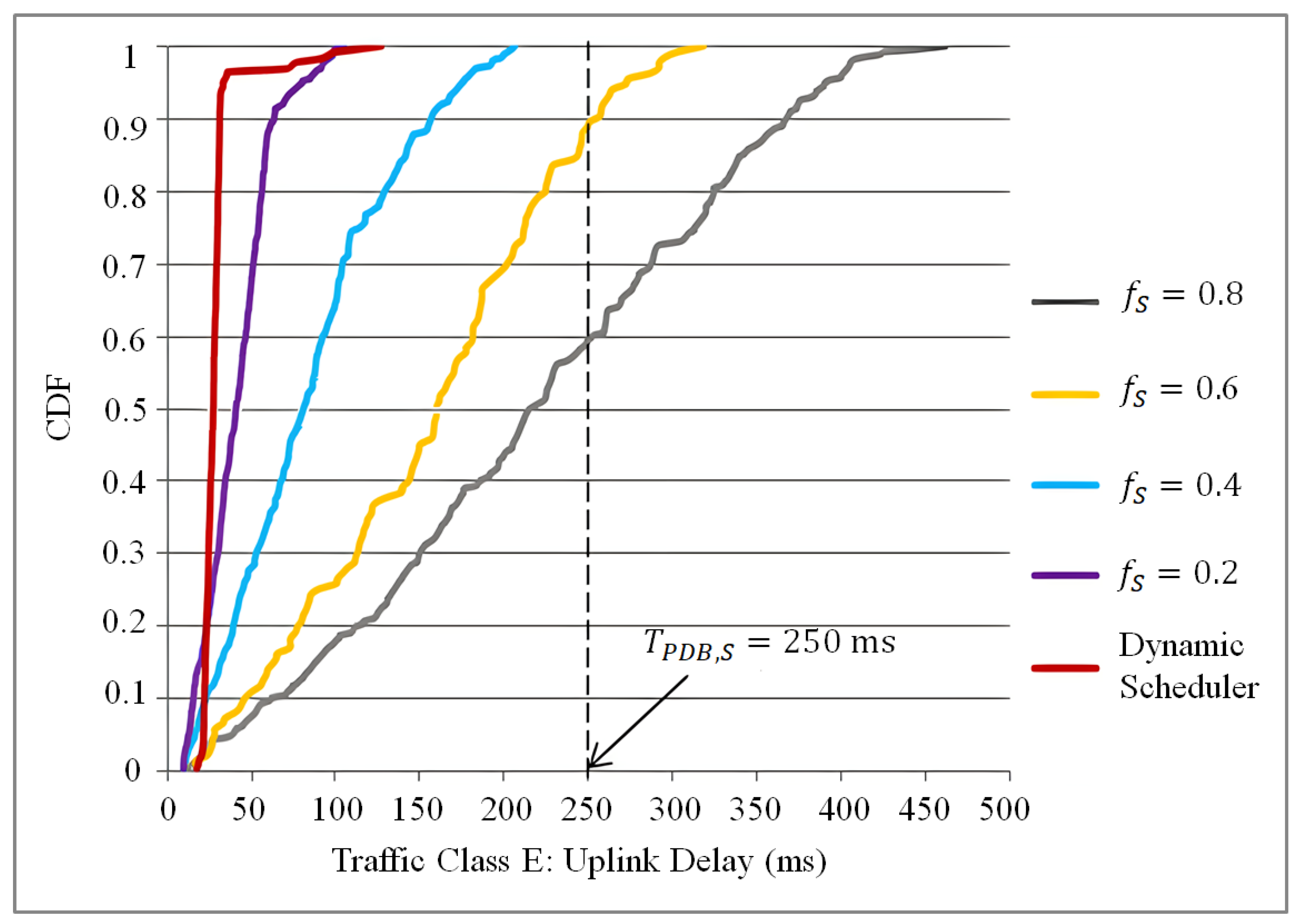
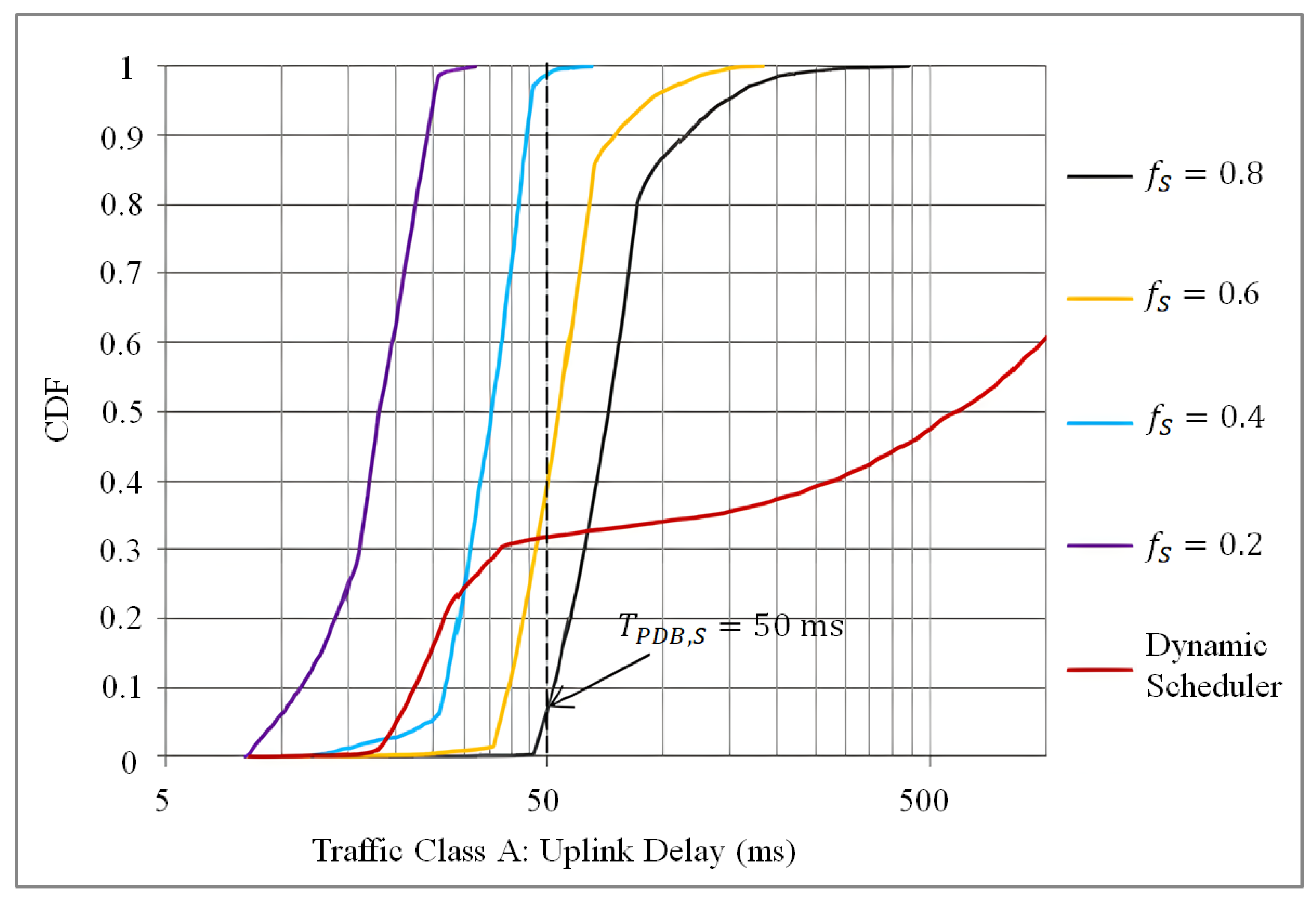
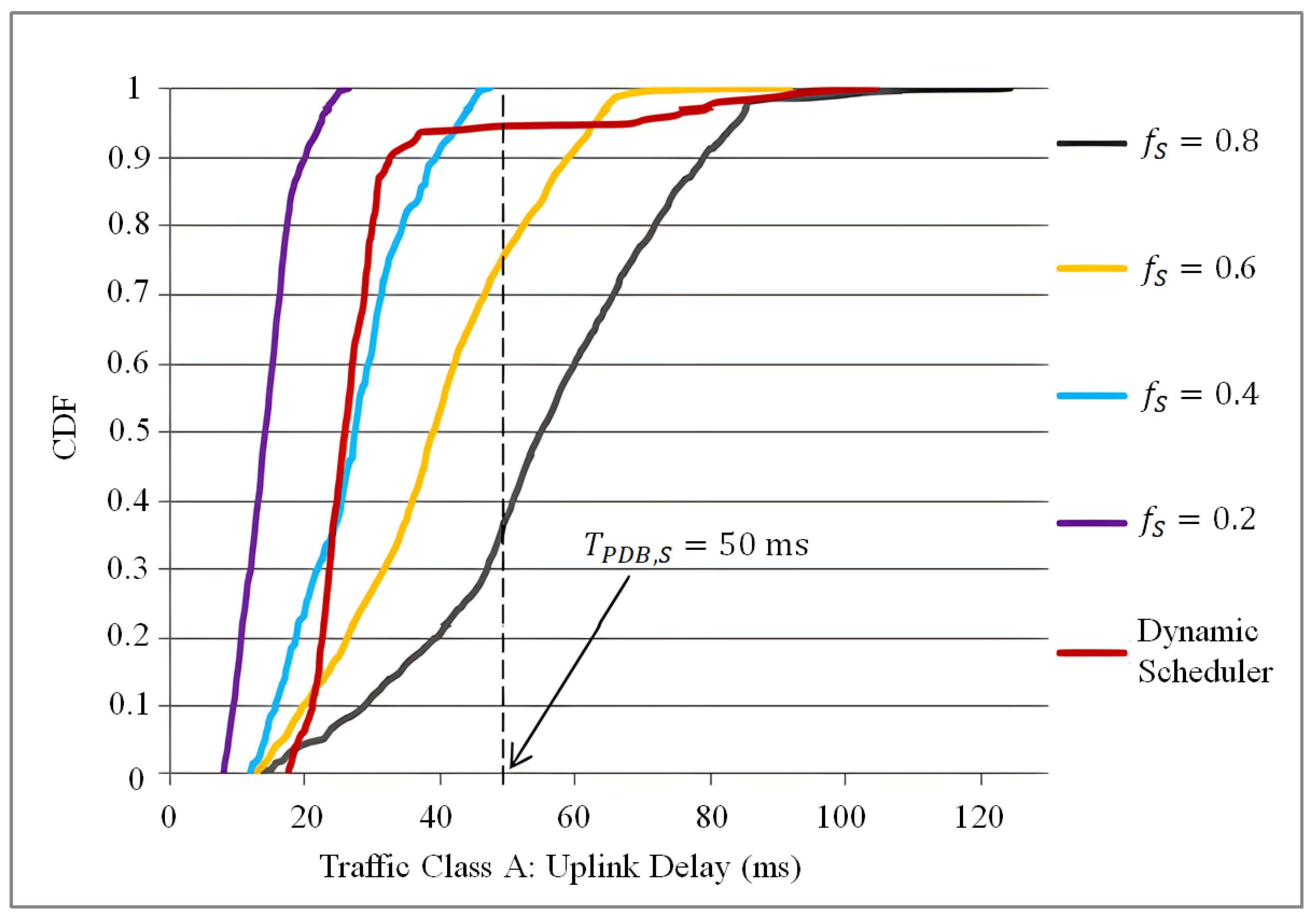
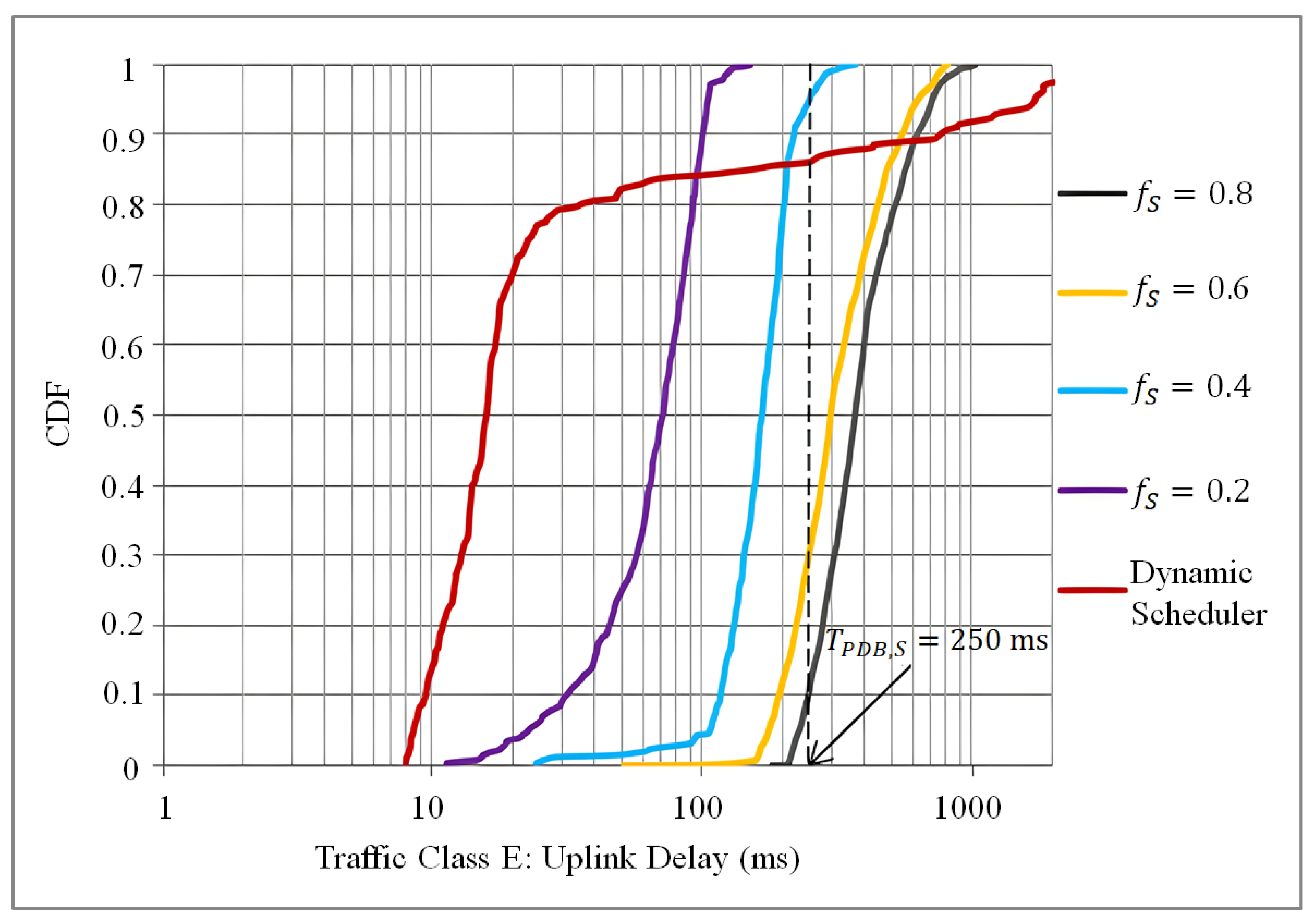
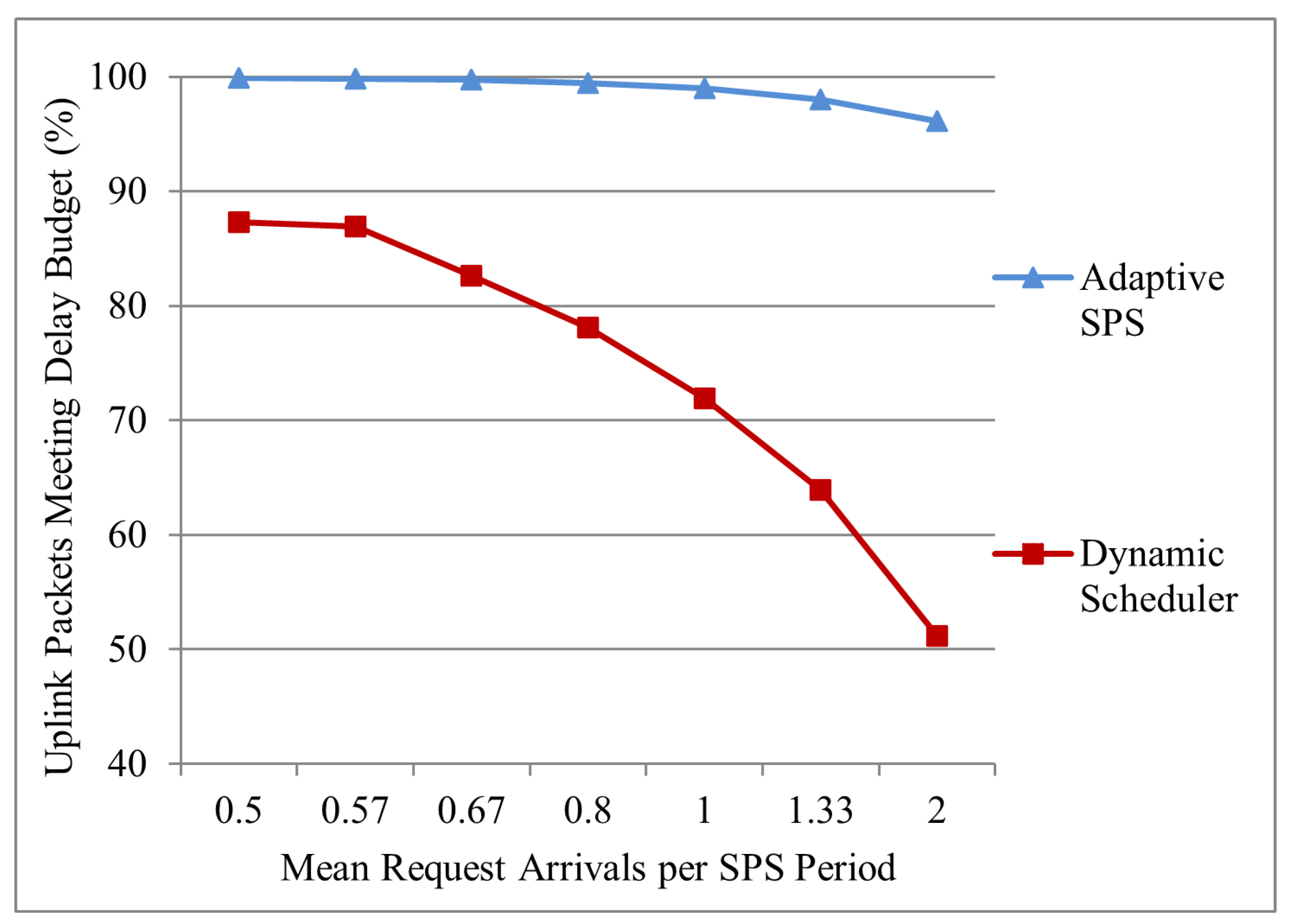
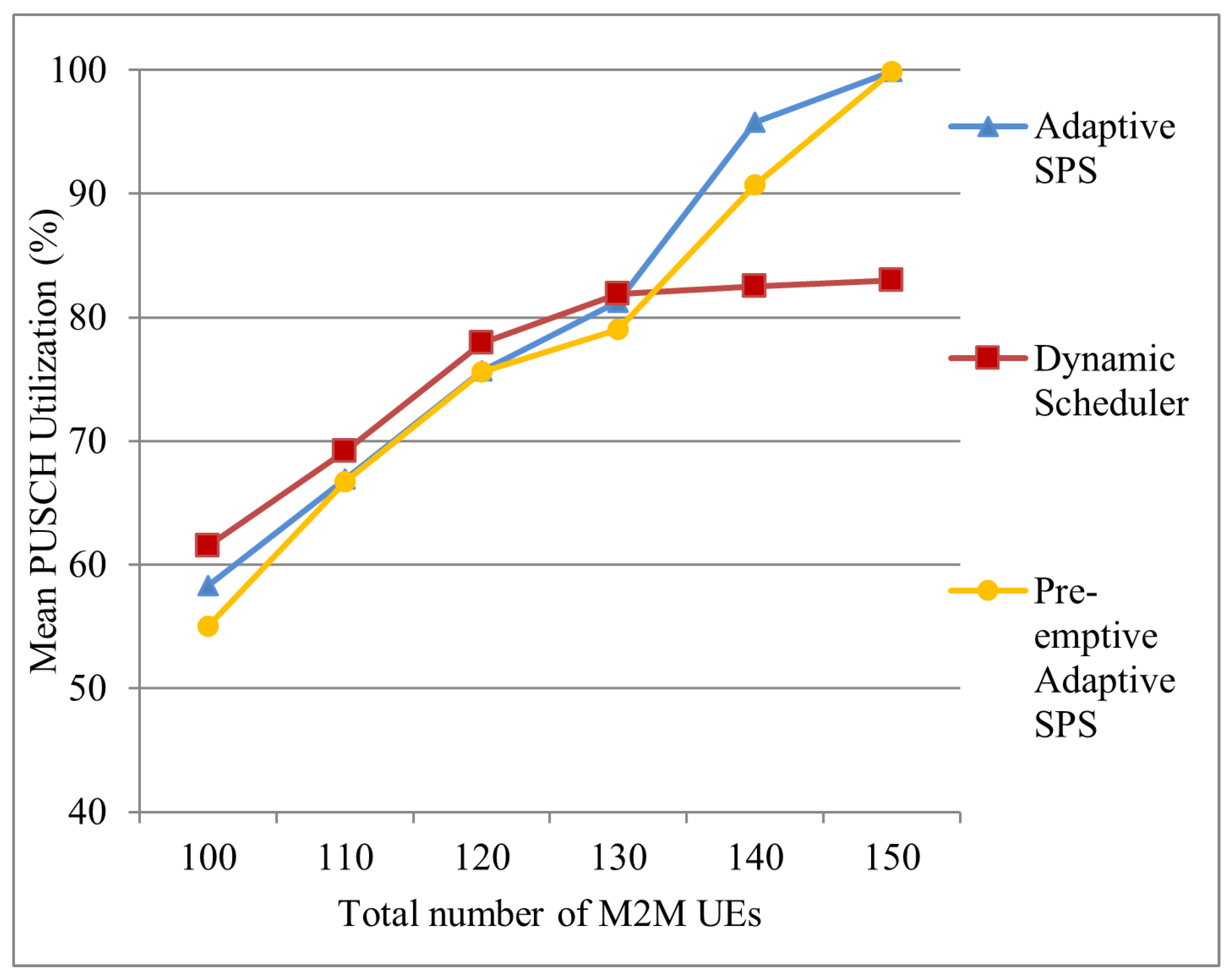
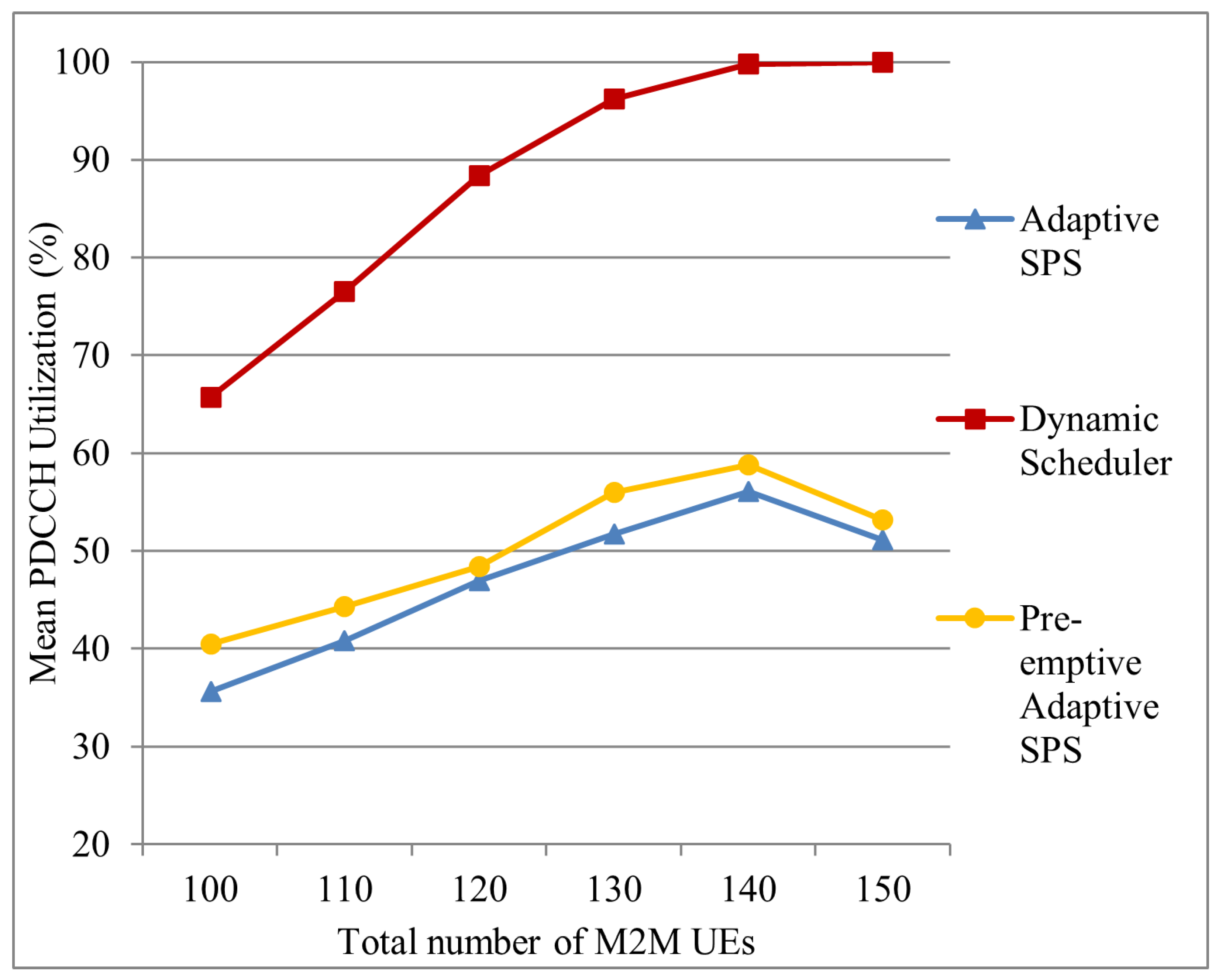
6.1. Multi-Service Adaptive SPS Algorithm
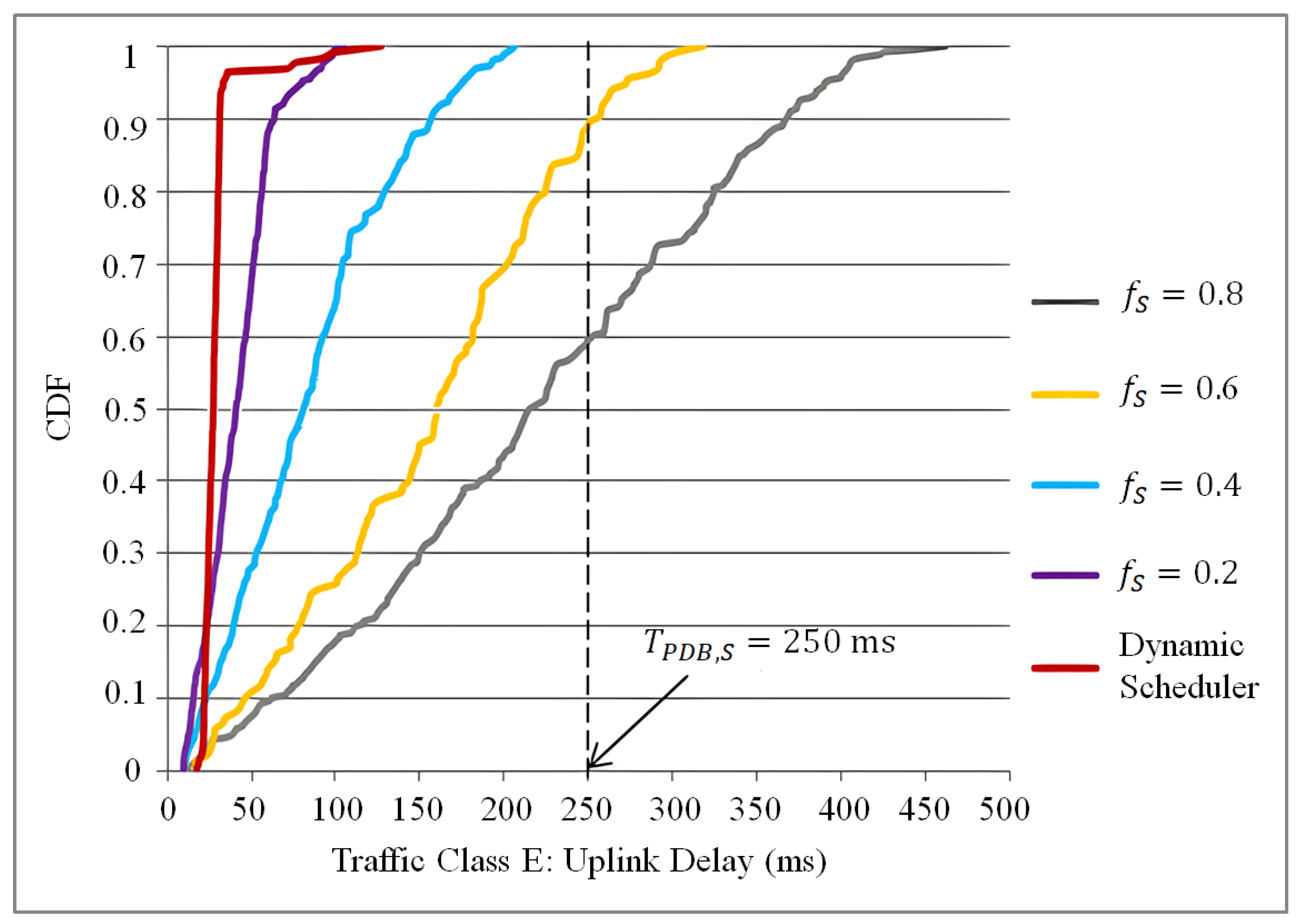
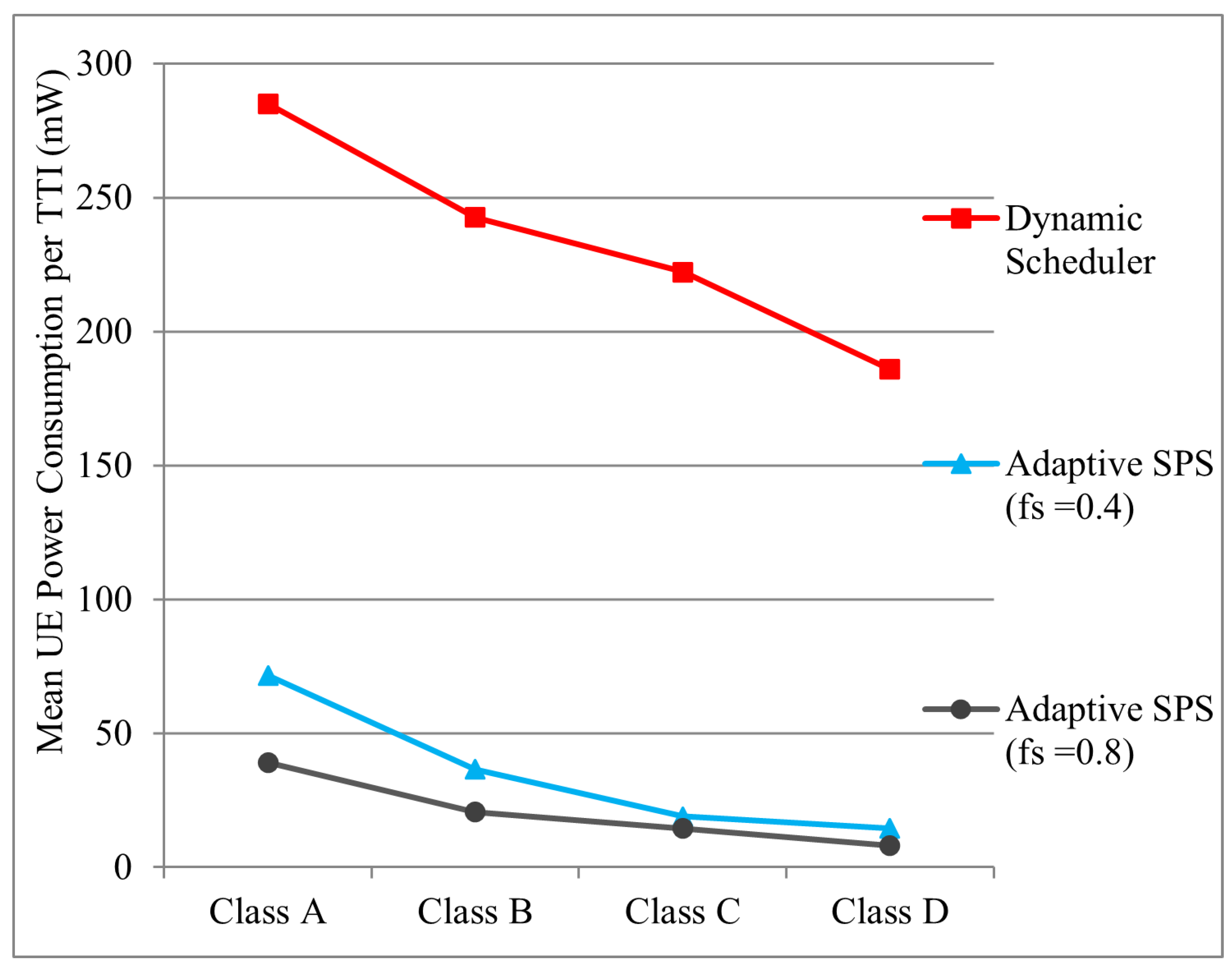
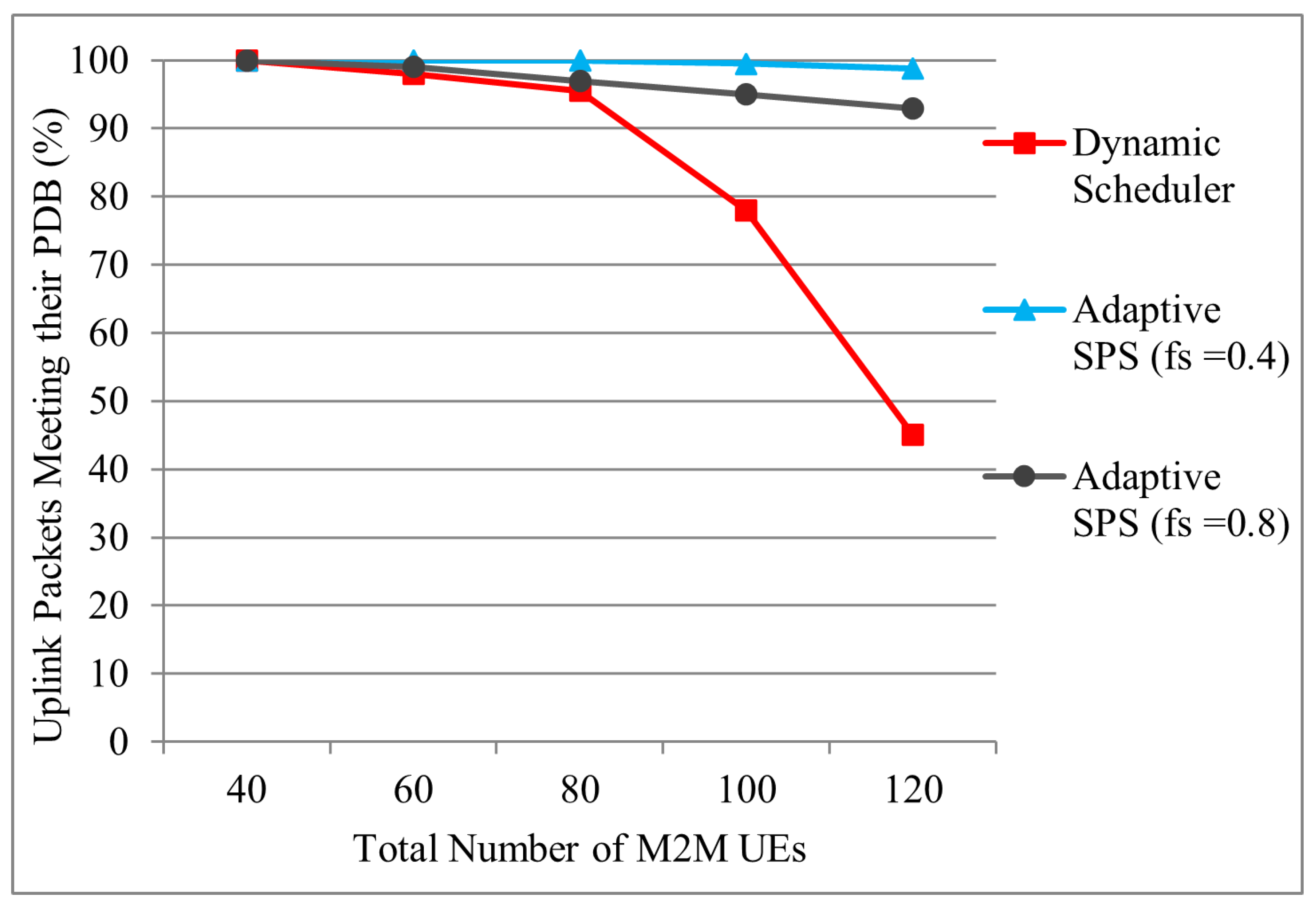
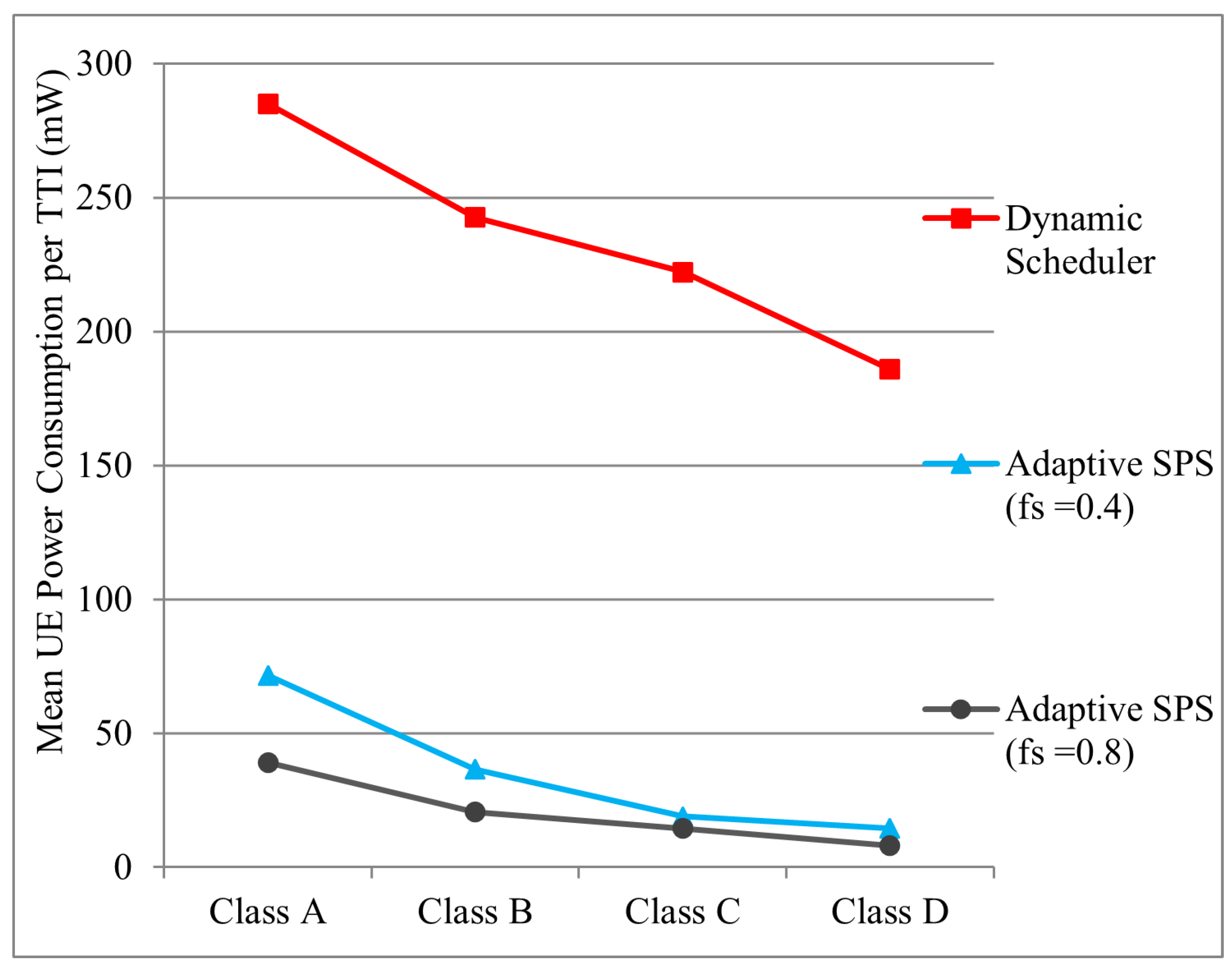
6.2. DRX Power Saving with Adaptive SPS
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Borgia, E. The Internet of Things vision: Key features, applications and open issues. Comput. Commun. 2014, 54, 1–31. [Google Scholar] [CrossRef]
- Biral, A.; Centenaro, M.; Zanella, A.; Vangelista, L.; Zorzi, M. The challenges of M2M massive access in wireless cellular networks. Digit. Commun. Netw. 2015, 1, 1–19. [Google Scholar] [CrossRef]
- 3GPP. 3GPP TS 22.368 V16.0.0 Technical Specification Group Services and System Aspects; Service Requirements for Machine-Type Communications (MTC); Stage 1 (Release 16); 3rd Generation Partnership Project: Sophia Antipolis, France, 2020. [Google Scholar]
- 3GPP. 3GPP TR 45.820 V0.3.0 Technical Specification Group GSM/EDGE Radio Access Network; Cellular System Support for Ultra Low Complexity and Low Throughput Internet of Things; Release 13; 3rd Generation Partnership Project: Sophia Antipolis, France, 2015. [Google Scholar]
- Cheng, M.Y.; Lin, G.Y.; Wei, H.Y.; Hsu, A.C.C. Overload control for Machine-Type-Communications in LTE-Advanced system. IEEE Commun. Mag. 2012, 50, 38–45. [Google Scholar] [CrossRef]
- Zhou, K.; Nikaein, N.; Knopp, R.; Bonnet, C. Contention Based Access for Machine-Type Communications over LTE. In Proceedings of the 2012 IEEE 75th Vehicular Technology Conference (VTC Spring), Yokohama, Japan, 6–9 May 2012; pp. 1–5. [Google Scholar] [CrossRef]
- Lin, T.M.; Lee, C.H.; Cheng, J.P.; Chen, W.T. PRADA: Prioritized Random Access With Dynamic Access Barring for MTC in 3GPP LTE-A Networks. IEEE Trans. Veh. Technol. 2014, 63, 2467–2472. [Google Scholar] [CrossRef]
- Brown, J.; Khan, J.Y. Key performance aspects of an LTE FDD based Smart Grid communications network. Comput. Commun. 2013, 36, 551–561. [Google Scholar] [CrossRef] [Green Version]
- Andrade, T.P.C.d.; Astudillo, C.A.; Fonseca, N.L.S.d. Allocation of Control Resources for Machine-to-Machine and Human-to-Human Communications Over LTE/LTE-A Networks. IEEE Internet Things J. 2016, 3, 366–377. [Google Scholar] [CrossRef] [Green Version]
- Shariatmadari, H.; Ratasuk, R.; Iraji, S.; Laya, A.; Taleb, T.; Jantti, R.; Ghosh, A. Machine-type communications: Current status and future perspectives toward 5G systems. IEEE Commun. Mag. 2015, 53, 10–17. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Jiang, D. Performance Comparison of Control-Less Scheduling Policies for VoIP in LTE UL. In Proceedings of the 2008 IEEE Wireless Communications and Networking Conference, Las Vegas, NV, USA, 31 March–3 April 2008; pp. 2497–2501. [Google Scholar] [CrossRef]
- 3GPP. 3GPP TS 36.300 V11.5.0 Evolved Universal Terrestrial Radio Access (E-UTRA) and Evolved Universal Terrestrial Radio Access Network (E-UTRAN); Overall Description; Stage 2, Release 11; 3rd Generation Partnership Project: Sophia Antipolis, France, 2013. [Google Scholar]
- Afrin, N.; Brown, J.; Khan, J.Y. An Adaptive Buffer Based Semi-persistent Scheduling Scheme for Machine-to-Machine Communications over LTE. In Proceedings of the 2014 Eighth International Conference on Next Generation Mobile Apps, Services and Technologies, Oxford, UK, 10–12 September 2014; pp. 260–265. [Google Scholar] [CrossRef]
- Afrin, N.; Brown, J.; Khan, J.Y. Performance evaluation of an adaptive semi-persistent LTE packet scheduler for M2M communications. In Proceedings of the 2014 8th International Conference on Signal Processing and Communication Systems (ICSPCS), Gold Coast, QLD, Australia, 15–17 December 2014; pp. 1–7. [Google Scholar] [CrossRef]
- Afrin, N.; Brown, J.; Khan, J.Y. Design of a buffer and channel adaptive LTE semi-persistent scheduler for M2M communications. In Proceedings of the 2015 IEEE International Conference on Communications (ICC), London, UK, 8–12 June 2015; pp. 5821–5826. [Google Scholar] [CrossRef]
- Brown, J.; Afrin, N.; Khan, J.Y. Delay Models for Static and Adaptive Persistent Resource Allocations in Wireless Systems. IEEE Trans. Mob. Comput. 2016, 15, 2193–2205. [Google Scholar] [CrossRef]
- Ratasuk, R.; Zhou, D.; Sinha, R. LTE-M Coexistence Within 5G New Radio Carrier. In Proceedings of the 2020 IEEE 3rd 5G World Forum (5GWF), Bangalore, India, 10–12 September 2020; pp. 224–228. [Google Scholar] [CrossRef]
- Le, T.K.; Salim, U.; Kaltenberger, F. An Overview of Physical Layer Design for Ultra-Reliable Low-Latency Communications in 3GPP Releases 15, 16, and 17. IEEE Access 2021, 9, 433–444. [Google Scholar] [CrossRef]
- Lien, S.Y.; Chen, K.C. Massive Access Management for QoS Guarantees in 3GPP Machine-to-Machine Communications. IEEE Commun. Lett. 2011, 15, 311–313. [Google Scholar] [CrossRef] [Green Version]
- Lien, S.Y.; Chen, K.C.; Lin, Y. Toward ubiquitous massive accesses in 3GPP machine-to-machine communications. IEEE Commun. Mag. 2011, 49, 66–74. [Google Scholar] [CrossRef]
- Gotsis, A.G.; Lioumpas, A.S.; Alexiou, A. Evolution of packet scheduling for Machine-Type communications over LTE: Algorithmic design and performance analysis. In Proceedings of the 2012 IEEE Globecom Workshops, Anaheim, CA, USA, 3–7 December 2012; pp. 1620–1625. [Google Scholar] [CrossRef]
- Gotsis, A.G.; Lioumpas, A.S.; Alexiou, A. Analytical modelling and performance evaluation of realistic time-controlled M2M scheduling over LTE cellular networks. Trans. Emerg. Telecommun. Technol. 2013, 24, 378–388. [Google Scholar] [CrossRef]
- Hussain, F.; Anpalagan, A.; Vannithamby, R. Medium access control techniques in M2M communication: Survey and critical review. Trans. Emerg. Telecommun. Technol. 2017, 28, e2869. [Google Scholar] [CrossRef]
- Wu, J.; Zhang, T.; Zeng, Z. Performance analysis of discontinuous reception mechanism with web traffic in LTE networks. In Proceedings of the 2013 IEEE 24th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), London, UK, 8–11 September 2013; pp. 1676–1681. [Google Scholar] [CrossRef]
- Tung, L.P.; Wang, L.C.; Hsueh, C.W.; Chang, C.J. Analysis of DRX power saving with RRC states transition in LTE networks. In Proceedings of the 2015 European Conference on Networks and Communications (EuCNC), Paris, France, 29 June–2 July 2015; pp. 301–305. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhao, Z.; Guan, H.; Du, L.; Tan, Z. Performance analysis of an adaptive DRX mechanism with flexible short/long cycle switching in LTE network. In Proceedings of the 2013 5th IEEE International Symposium on Microwave, Antenna, Propagation and EMC Technologies for Wireless Communications, Chengdu, China, 29–31 October 2013; pp. 27–32. [Google Scholar] [CrossRef]
- Ergul, O.; Yilmaz, O.; Koc, A.T.; Akan, O.B. DRX and QoS-aware energy-efficient uplink scheduling for long term evolution. In Proceedings of the 2013 IEEE Global Communications Conference (GLOBECOM), Atlanta, GA, USA, 9–13 December 2013; pp. 4644–4649. [Google Scholar] [CrossRef]
- Tung, L.P.; Lin, Y.D.; Kuo, Y.H.; Lai, Y.C.; Sivalingam, K.M. Reducing power consumption in LTE data scheduling with the constraints of channel condition and QoS. Comput. Netw. 2014, 75, 149–159. [Google Scholar] [CrossRef]
- 3GPP. 3GPP TS 36.211 V10.7.0 Evolved Universal Terrestrial Radio Access (E-UTRA); Physical Channels and Modulation; Release 10; 3rd Generation Partnership Project: Sophia Antipolis, France, 2013. [Google Scholar]
- 3GPP. 3GPP TS 36.321 V10.8.0 Evolved Universal Terrestrial Radio Access (E-UTRA); Medium Access Control (MAC) Protocol Specification; Release 10; 3rd Generation Partnership Project: Sophia Antipolis, France, 2013. [Google Scholar]
- 3GPP. 3GPP TSG-RAN WG2 Meeting, R2-071285, DRX Parameters in LTE; 3rd Generation Partnership Project: Sophia Antipolis, France, 2007. [Google Scholar]
- Tseng, C.C.; Wang, H.C.; Kuo, F.C.; Ting, K.C.; Chen, H.H.; Chen, G.Y. Delay and Power Consumption in LTE/LTE-A DRX Mechanism with Mixed Short and Long Cycles. IEEE Trans. Veh. Technol. 2016, 65, 1721–1734. [Google Scholar] [CrossRef]
- Erceg, V.; Greenstein, L.J.; Tjandra, S.Y.; Parkoff, S.R.; Gupta, A.; Kulic, B.; Julius, A.A.; Bianchi, R. An empirically based path loss model for wireless channels in suburban environments. IEEE J. Sel. Areas Commun. 1999, 17, 1205–1211. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| LTE Configuration | 3 MHz TDD |
| Uplink:Downlink ratio | 5:5 |
| Maximum UE transmission power | 0.5 W |
| Maximum eNodeB transmission power | 5 W |
| UE reception sensitivity | −95 dBm |
| eNodeB reception sensitivity | −123 dBm |
| UE antenna gain | −1 dBi |
| eNodeB antenna gain | 15 dBi |
| SR periodicity | 10 ms |
| Uplink control channels | 2 |
| Channel model | Suburban Erceg, Terrain C [33] |
| Radio network model | Single cell, 3 km radius |
| Adaptive SPS parameters | , |
| M2M traffic model | Poisson arrival process with mean requests/millisecond for traffic class S where is varied for different simulation runs |
| M2M request size | Mean packet size 10 Bytes (exponentially distributed) |
| DRX parameters | ON-timer = 5 ms, Inactivity timer = 50 ms |
| Traffic Class | PDB (ms) |
|---|---|
| A | 50 |
| B | 100 |
| C | 150 |
| D | 200 |
| E | 250 |
| Traffic Class | Burst Size (Packets) | Mean Arrival Rate (Bursts/s) | PDB (ms) |
|---|---|---|---|
| A | exponential (mean 2) | 40 | 50 |
| B | 20 | 100 | |
| C | 13.33 | 150 | |
| D | 10 | 200 |
| Traffic Class (S) | Mean (Requests/ms) | (ms) | (ms) | |
|---|---|---|---|---|
| F | 0.1 | 100 | 40 | 12 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Afrin, N.; Brown, J.; Khan, J.Y. A Multi-Service Adaptive Semi-Persistent LTE Uplink Scheduler for Low Power M2M Devices. Future Internet 2022, 14, 107. https://doi.org/10.3390/fi14040107
Afrin N, Brown J, Khan JY. A Multi-Service Adaptive Semi-Persistent LTE Uplink Scheduler for Low Power M2M Devices. Future Internet. 2022; 14(4):107. https://doi.org/10.3390/fi14040107
Chicago/Turabian StyleAfrin, Nusrat, Jason Brown, and Jamil Y. Khan. 2022. "A Multi-Service Adaptive Semi-Persistent LTE Uplink Scheduler for Low Power M2M Devices" Future Internet 14, no. 4: 107. https://doi.org/10.3390/fi14040107
APA StyleAfrin, N., Brown, J., & Khan, J. Y. (2022). A Multi-Service Adaptive Semi-Persistent LTE Uplink Scheduler for Low Power M2M Devices. Future Internet, 14(4), 107. https://doi.org/10.3390/fi14040107