
Three Layered Architecture for Driver Behavior Analysis and Personalized Assistance with Alert Message Dissemination in 5G Envisioned Fog-IoCV


Abstract
:1. Introduction
- Heterogeneous data—To analyze the behavior of drivers, many types of information are needed, including information on drivers’ physical states (drowsy, distracted), vehicles’ on-board information (accelerating, braking), and environmental information (road conditions, weather conditions). Processing such data dynamically increases complexity.
- Uncertainties—in real-life scenarios, there are many uncertainties in the environment that need to be considered in order to design an efficient assistance module.
- The proposed driver behavior analysis and personalized assistance model are designed in such a way as to overcome these issues. The major objective of this research work is to design a novel system for detecting driver behavior and providing intelligent assistance. The sub-objectives are listed below,
- To minimize the computational overhead during driver behavior analysis.
- To minimize latency in forwarding alert messages.
- To minimize transmission delay in offloading and maximize the resource utilization of fog nod
- To minimize the energy consumption of fog nodes
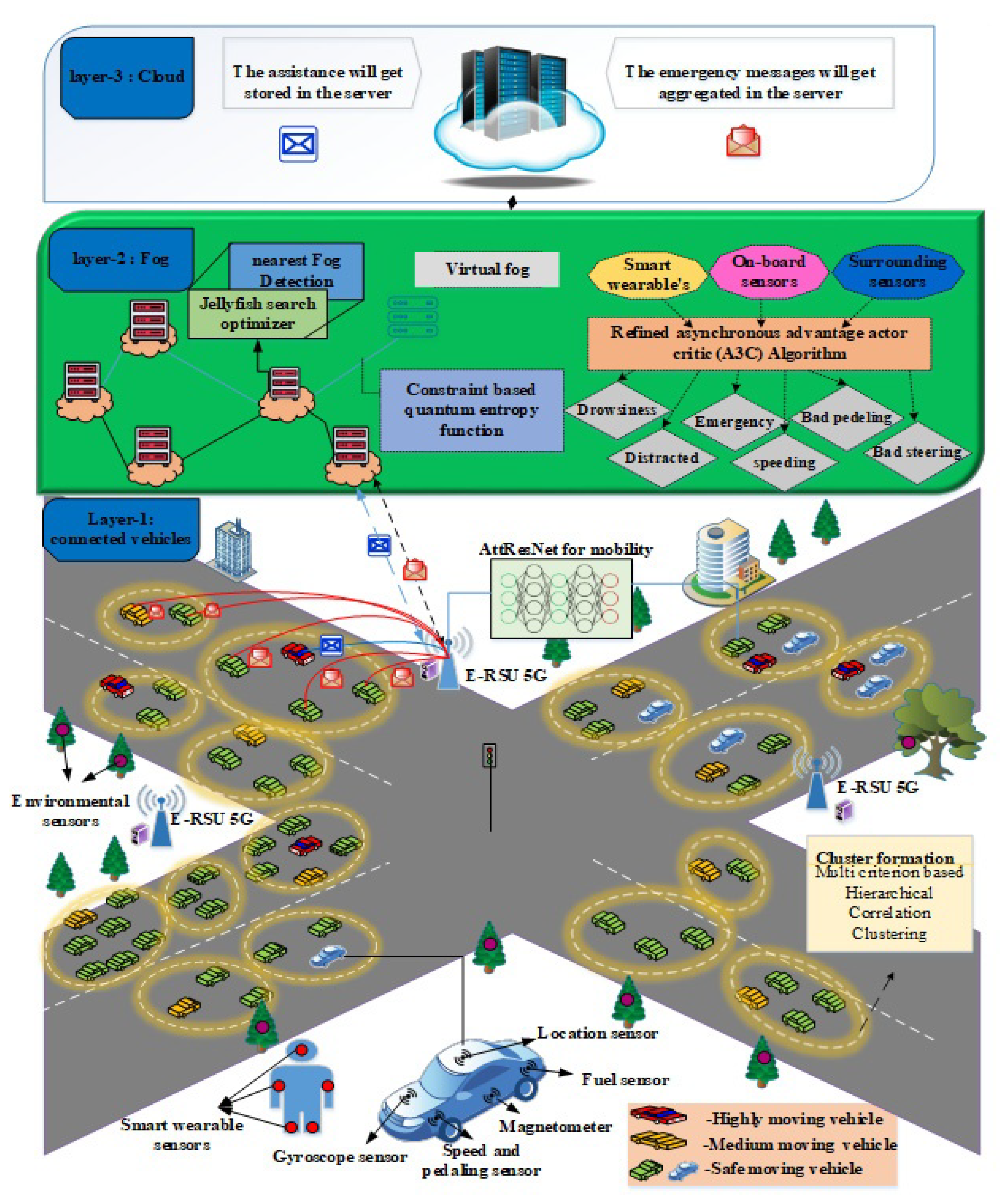
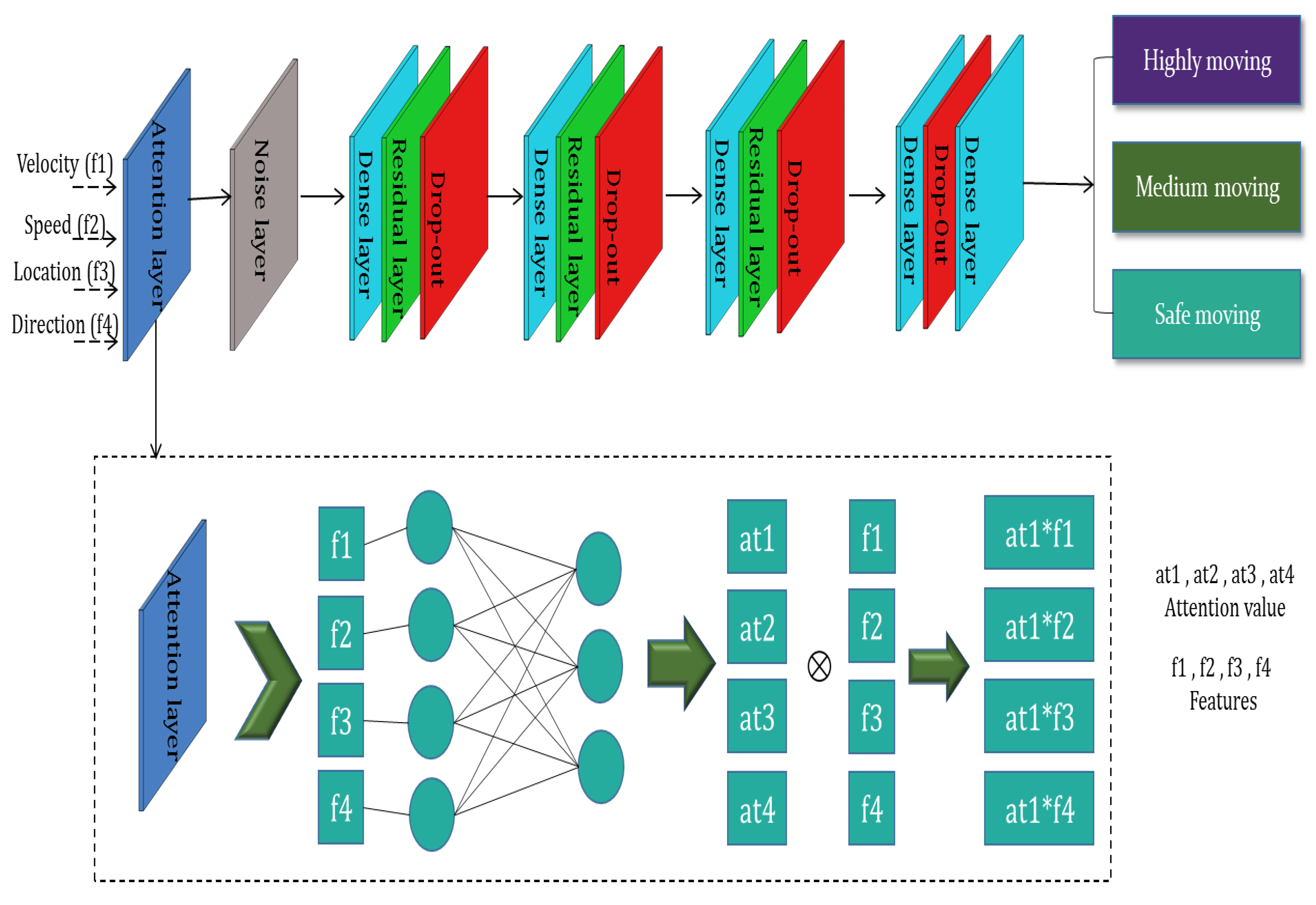
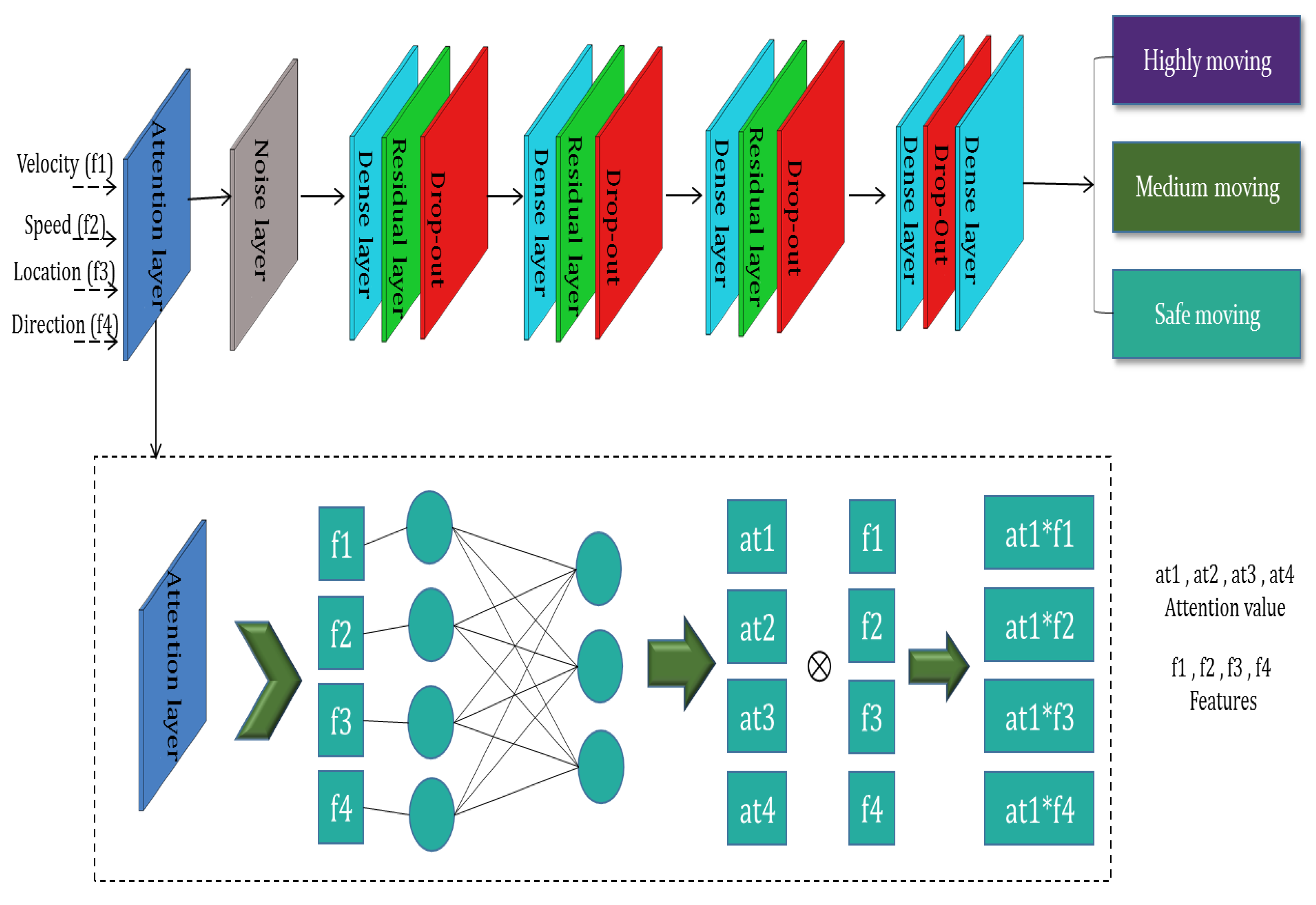
- Vehicles in the road environment are clustered by edge-assisted road side units (E-RSUs) using multi-criterion-based hierarchical correlation clustering (MCB-HCC) [22] in order to reduce the complexity in handling a large number of nodes. The information about these vehicles is processed in an attention-based residual neural network (AttResNet) [23] to classify the vehicles on the basis of mobility.
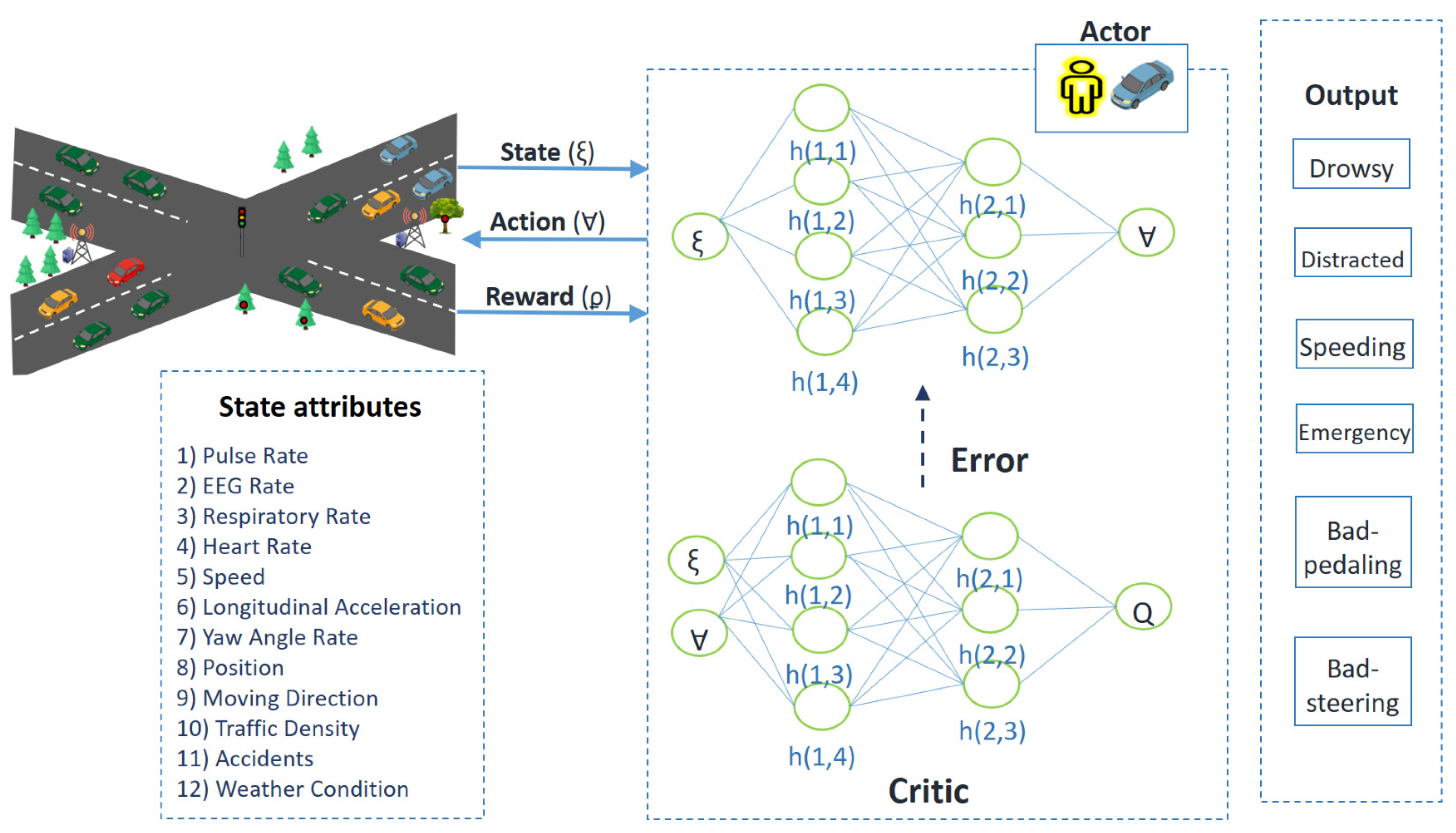
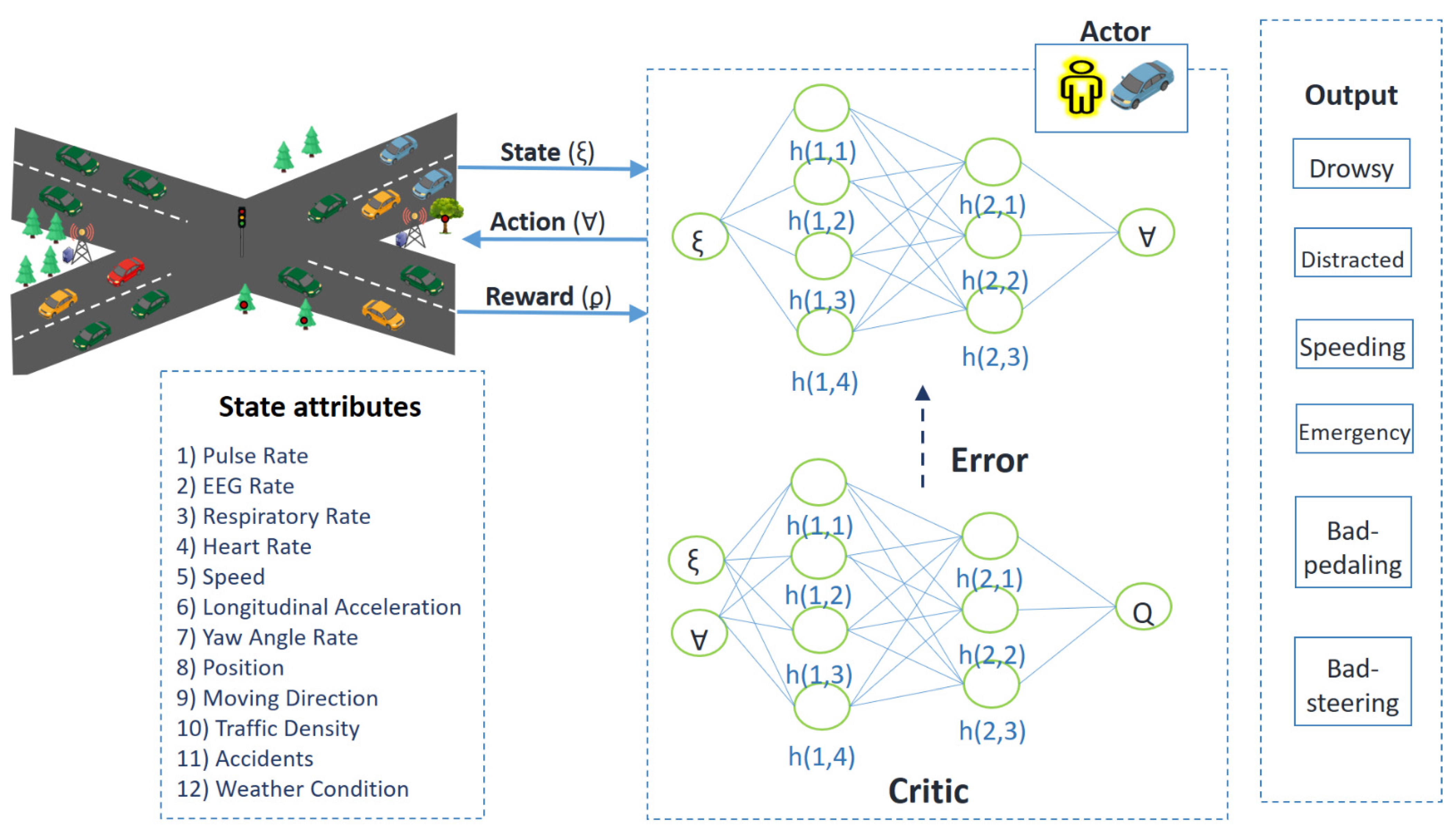
- The driver behavior of the above classified vehicles is analyzed for several drivers, vehicles, and environmental conditions by implementing a refined asynchronous advantage actor critic (A3C) Algorithm. In this process, the driver’s current state is analyzed and classified into several classes such as drowsy, distracted, in an emergency, speeding, bad pedaling, and bad steering.
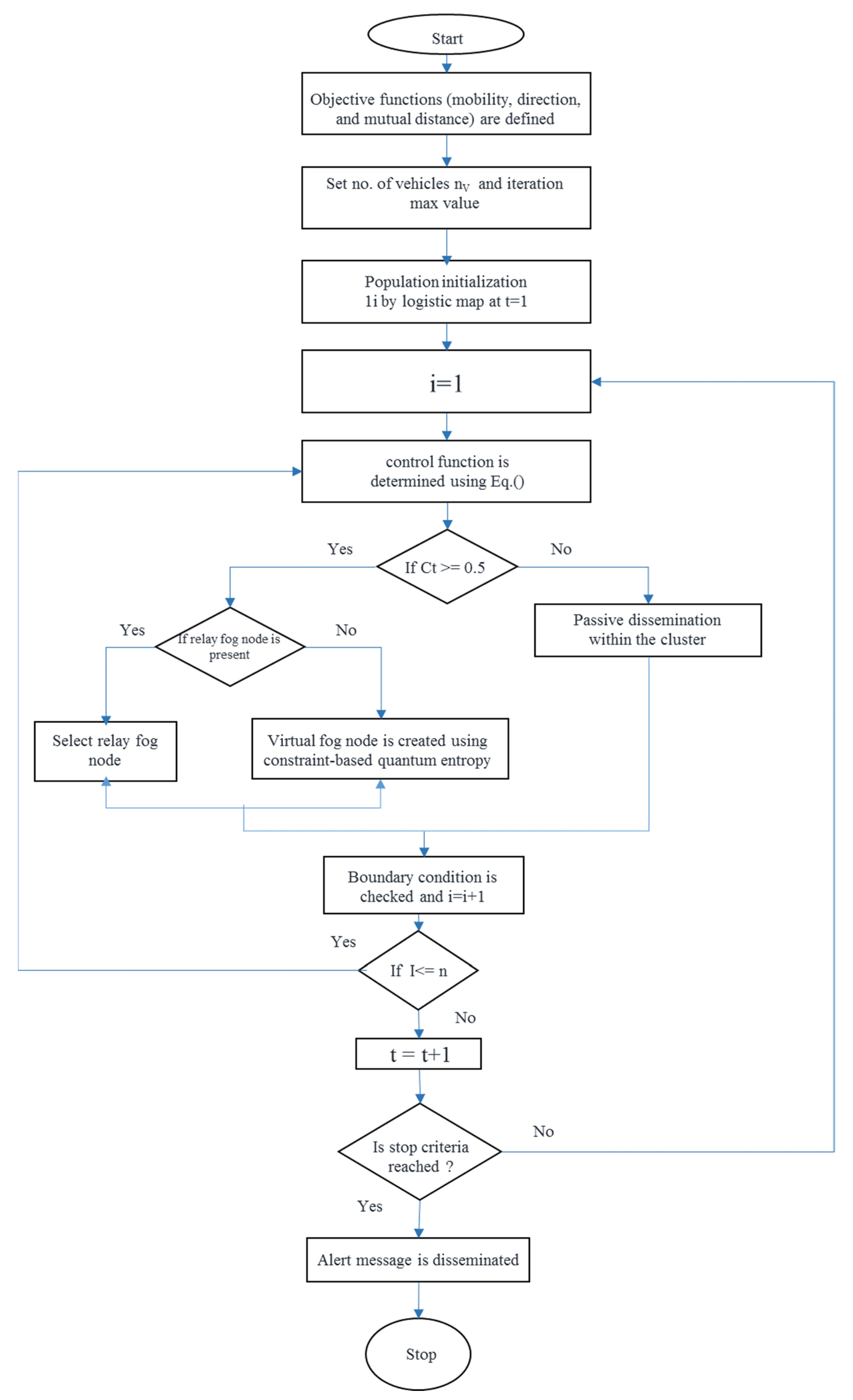
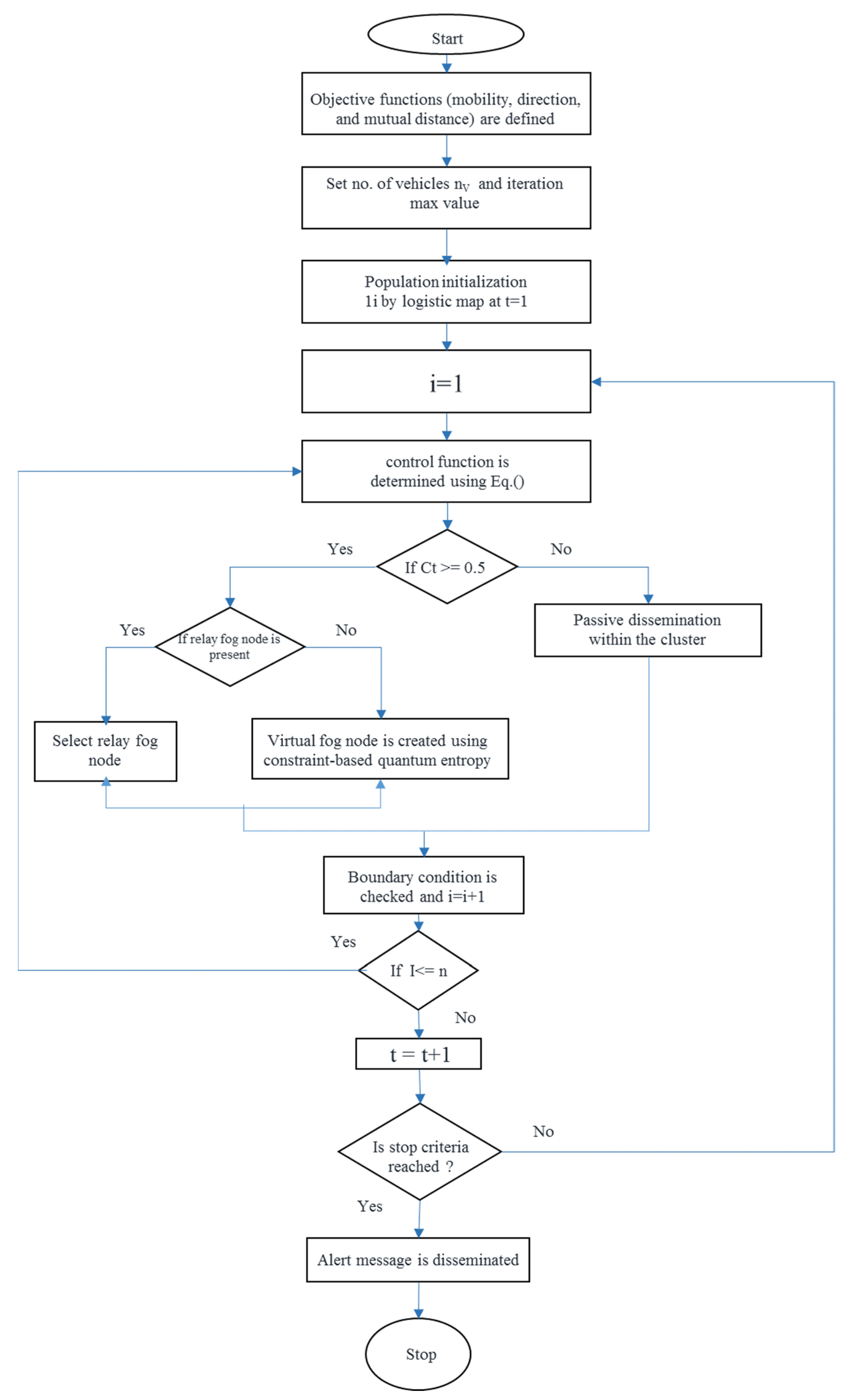
- In case of emergency situations, alert messages are disseminated to surrounding vehicles of the vehicle presenting a risk, which is performed via fog nodes using a jellyfish search optimization (JSO) algorithm [24]. An alert message is also disseminated to nearby optimal fog nodes, and in the case that there are no fog nodes, a virtual fog node is created dynamically by using a constraint-based quantum entropy function.
- Personalized assistance is provided to the driver on the basis of the analyzed behavior of the driver. Assistance is provided one or more times by utilizing a multi-attribute utility model. This assistance facilitates in preventing road casualties. All instances of assistance are stored in a cloud server for long-term assessment of driver behavior.
2. Related Work
3. Problem Statement
- High false-alarm rate: Due to limited consideration of parameters from the driver and surroundings, the prediction of accidents is not accurate and leads to high traffic congestion in both urban and rural areas and re-routing of nearby vehicles. For accurate driver-behavior detection, driver health parameters (pulse rate, EEG rate, respiration rate, and heart rate), vehicle-motion-detection parameters (speed, longitudinal acceleration, yaw angle rate, gyroscope, and magnetometer), and surrounding factors (traffic density, accidents, weather conditions, and pedestrians) are required. Lack of these important factors affects accuracy.
- Lack of optimal assistance for drivers: Recommendations are provided to the driver only on the basis of vehicle motion detection, which is not sufficient enough to assist drivers. The state of driving is not analyzed to give recommendations to drivers. To overcome this, driver states such as drowsiness, distraction, and emergency should be detected.
- High latency: In the existing works, latency is observed in two fields. Computing tasks in a cloud environment increases time consumption and thereby increases the probability of accidents occurring. Even when computations are carried out in an edge server, the higher number of vehicles in a real-time scenario makes it time consuming.
- Clustering can be performed effectively, however, if the number of samples increases, scaling issues will occur.
- When higher requirements are put forward for timely task processing, which involves a large number of computations, task offloading faces obstacles.
- Even though the offloading is performed with ultra-low latency, the offloading quality (i.e., storage, deadline delay constraints, and energy efficiency) is not good and should be improved.
- Lack of environmental factors leads to mobile edge server failure, so offloading accuracy is decreased.
- A different level of connectivity for longer tests with more vehicles within other networks cannot be calculated.
- The data library is not sufficient because it does not have more trajectory data in addition to other types of data describing driver situations, particularly weather conditions and driving behavior, and real-time updating of the data library should be implemented.
- The health parameters of drivers are not considered, and they are important in emergencies.
- Regarding drivers not only having the risk of an accident for a particular road section but also sub-section or intersection, such details are not given.
- Environment characteristics such as weather conditions are not observed in the road accident risk map analysis but do have an impact on road accidents
- Fuzzy logic is not always accurate; hence, the results are based on assumption. This increases the number of rules for each vehicle to check to make decisions, which is time consuming for the vehicle.
- If there are no neighboring vehicles, the data packets are sent to road side units, and selfish nodes should be identified to eliminate unnecessary packet drops.
- Research solutions: The jellyfish search optimizer can be used to select risky vehicles, which will increase the accuracy. All alert messages are stored in the cloud for further assistance
4. Proposed Work
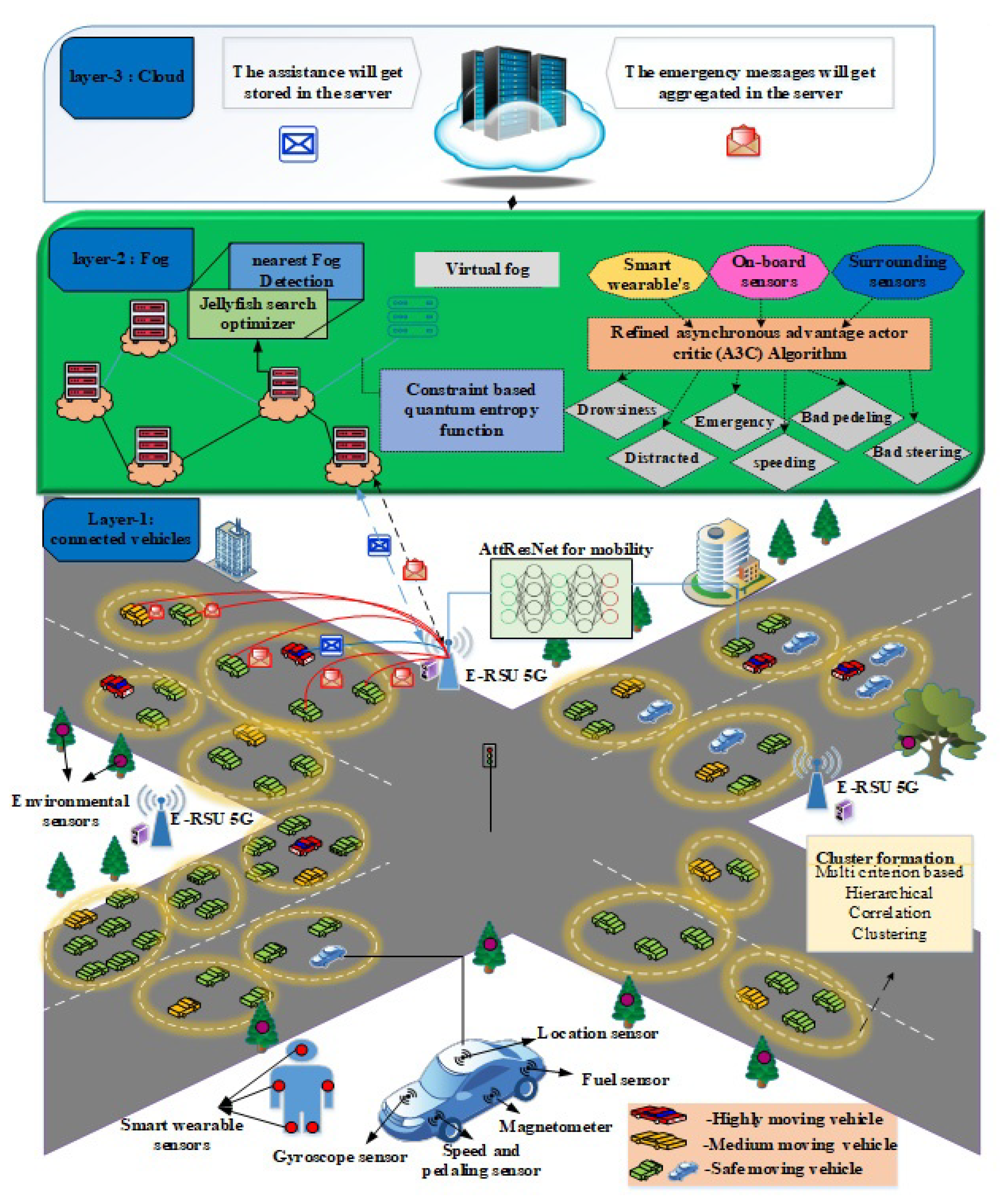
- Layer 1 (connected vehicles): This layer consists of intelligent connected vehicles that have onboard sensors to collect information such as speed, longitudinal acceleration, yaw angle rate, gyroscope information, and magnetometer information. The drivers inside the vehicles are deployed with smart wearable sensors to gather information such as pulse rate, EEG rate, respiration rate, and heart rate. The collected data are sent to the upper layers through communication technologies. Layer 1 also includes edge-assisted road side units (E-RSUs) to speed up the process.
- Layer 2 (fog computing): This layer consists of distributed fog nodes, which are responsible for monitoring and handling separate regions in Layer 1. The nodes are connected to an E-RSU and have a computation ability greater than it.
- Layer 3 (cloud server): This is the uppermost layer in the architecture and consists of a cloud server that continuously collects and maintains the information provided by Layer-1 and Layer-2 devices.
4.1. Cluster-Based Vehicle Motion Detection
| Algorithm 1: Distance of correlation |
|
Initialize Vehicles Determine Covariance matrix Compute dimensionality correlation of Calculate ; |
| ; |
| ; |
| ; |
| ; |
| ; // Euclidean distance |
| do |
| do |
| Pseudo code: MCB-HCC |
| do |
| do |
| do |
| do |
4.2. Driver Behavior Analysis and Prediction
| Algorithm A3C: Pseudo code |
| , SGD optimizer |
| ; |
| -; |
| ) using Equation (17) |
| Target formulation using Equation (19) |
| Critic loss calculation: |
| Critic gradient computation: |
| Actor gradient computation: |
4.3. Alert Message Dissemination for Selective Regions
4.4. Tri-State-Aware Personalized Assistance
5. Experimental Results
5.1. Simulation Setup
5.2. Comparative Analysis
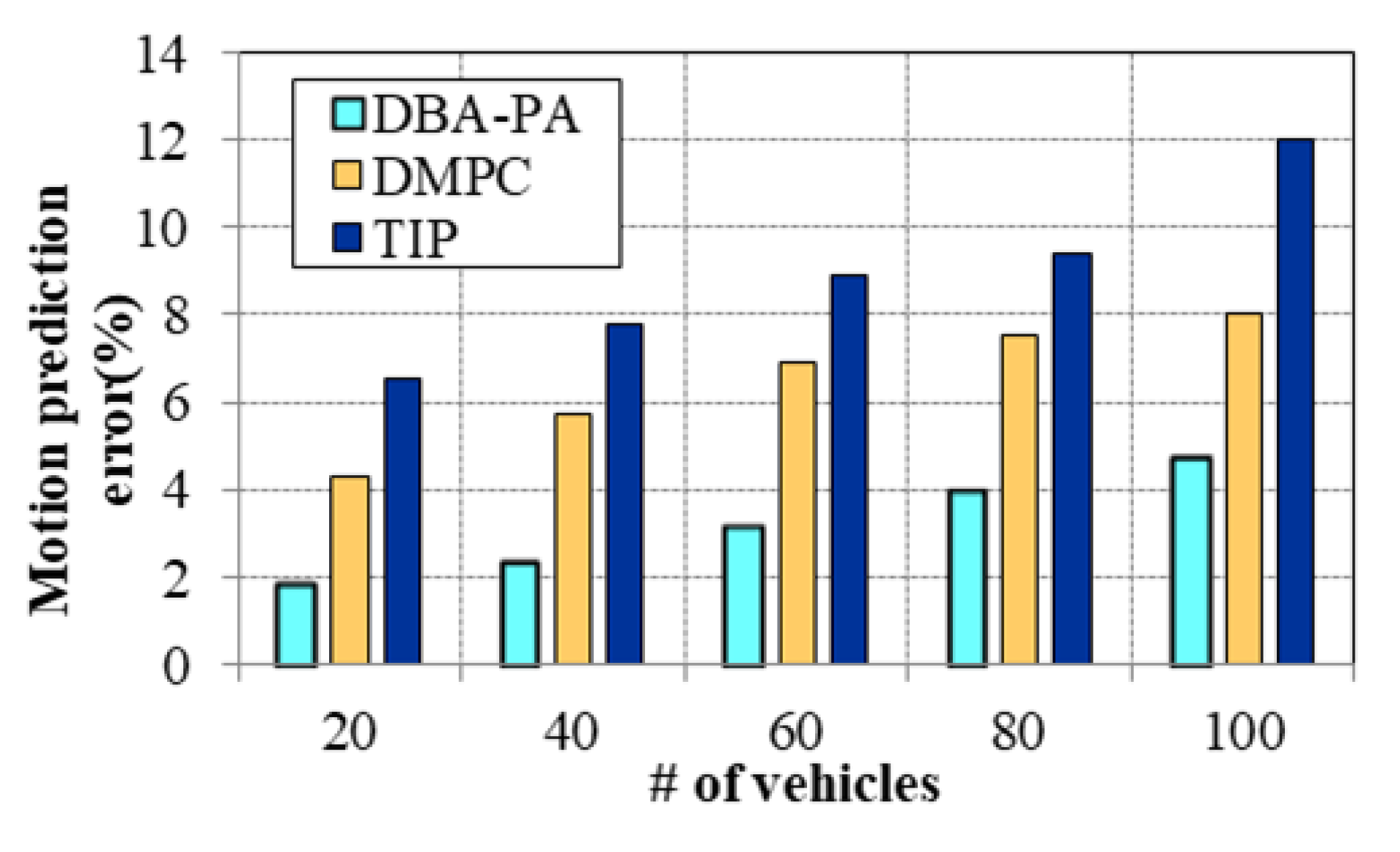
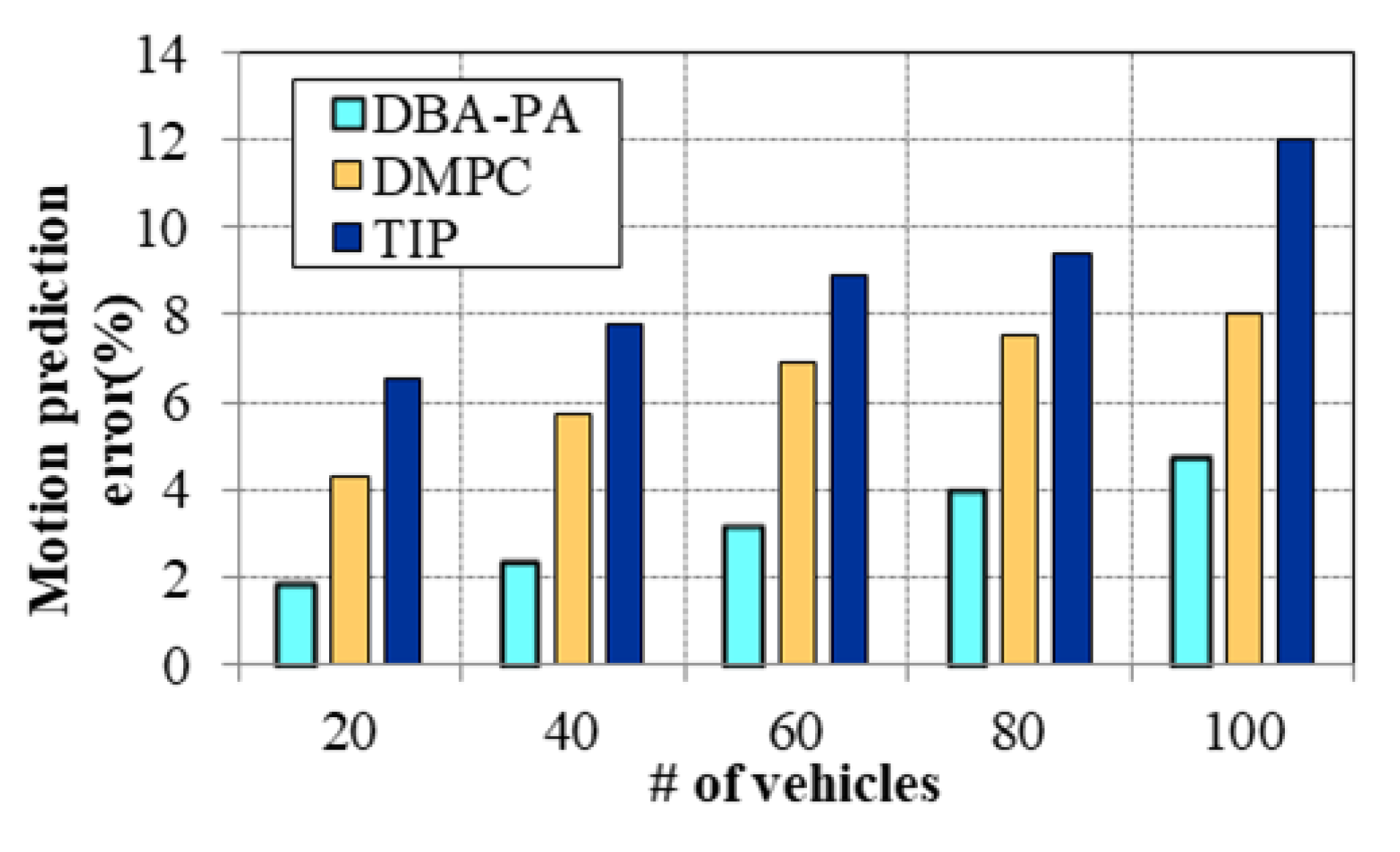
5.2.1. Impact of Motion Prediction Error
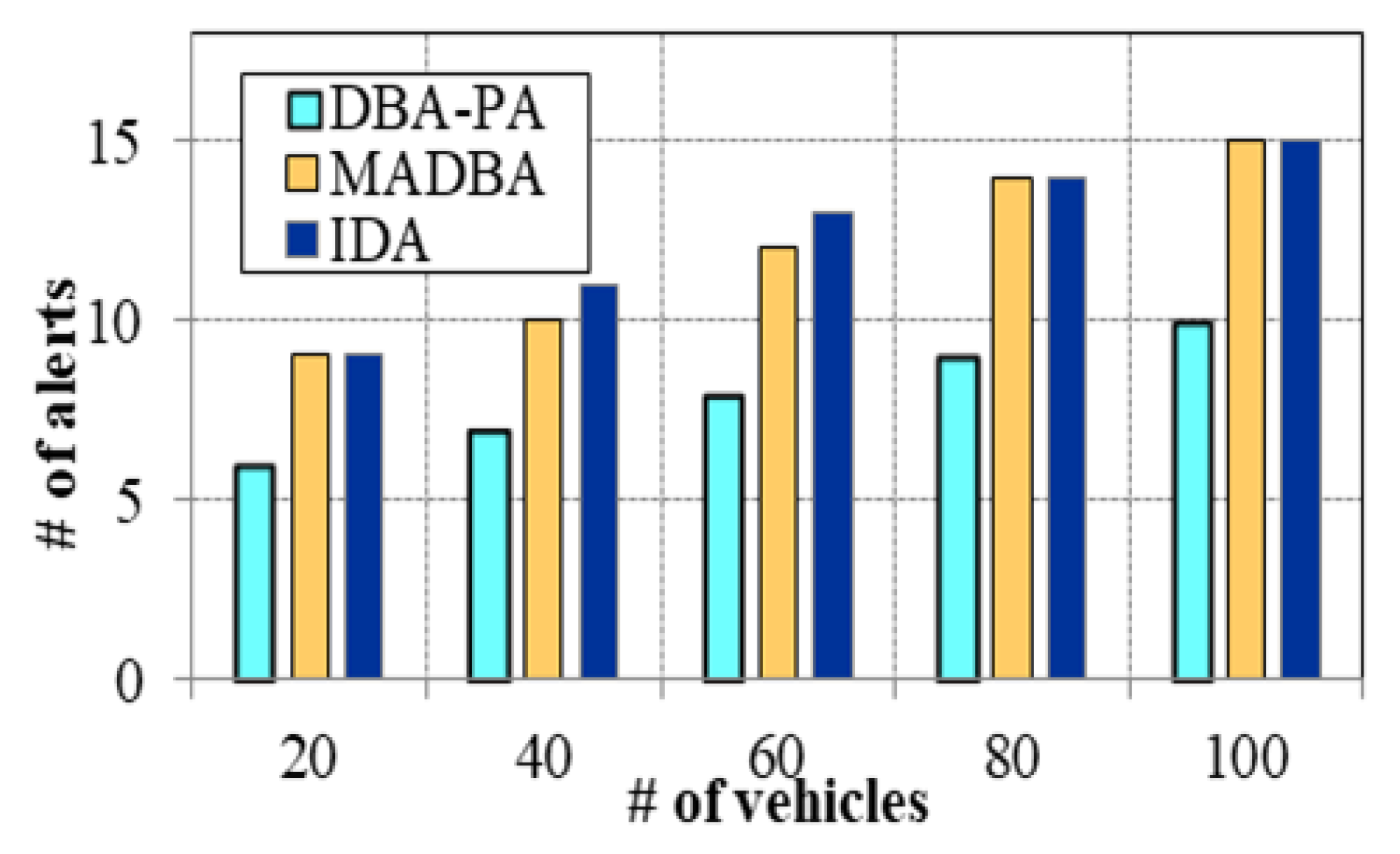
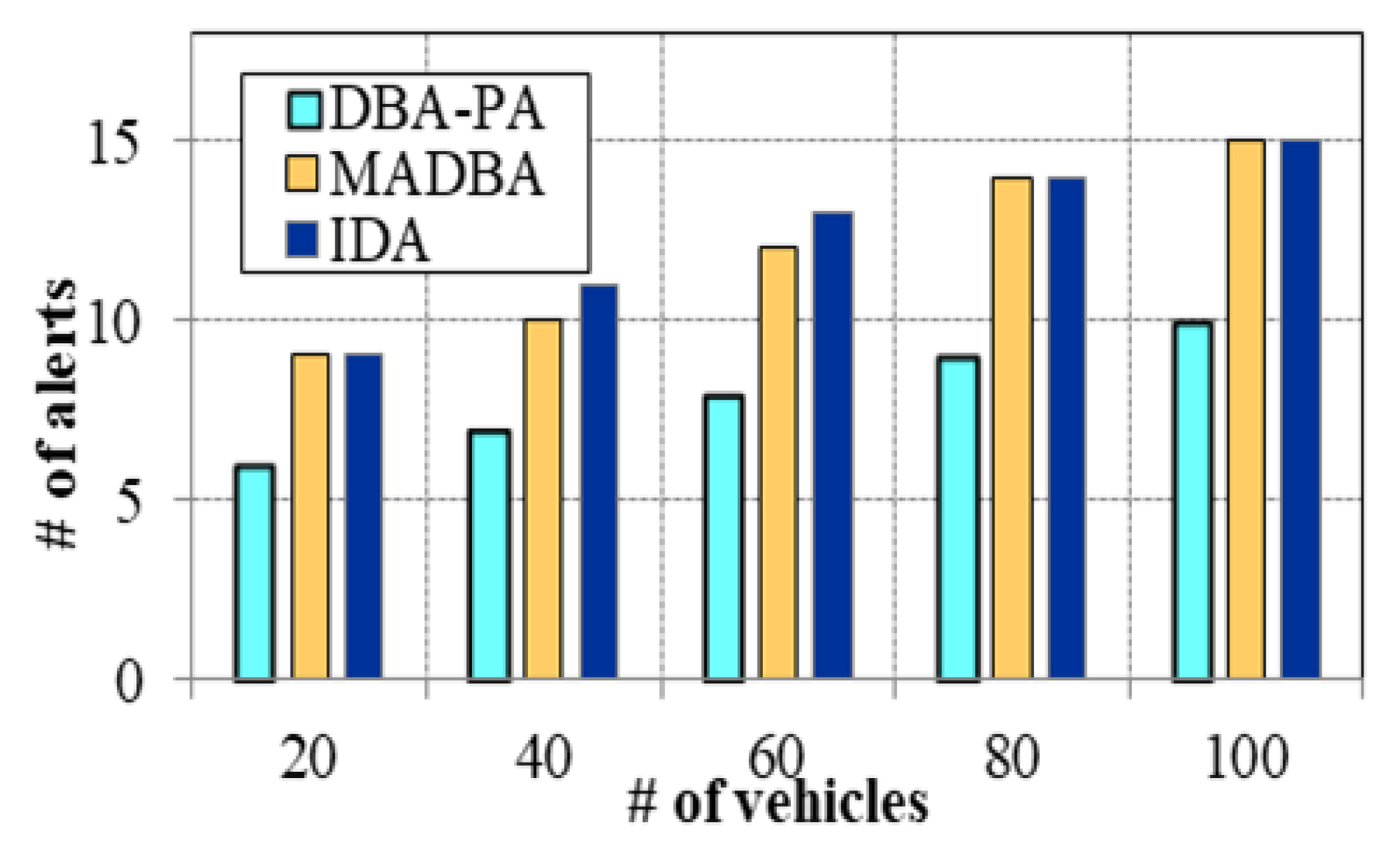
5.2.2. Impact of Number of Alerts
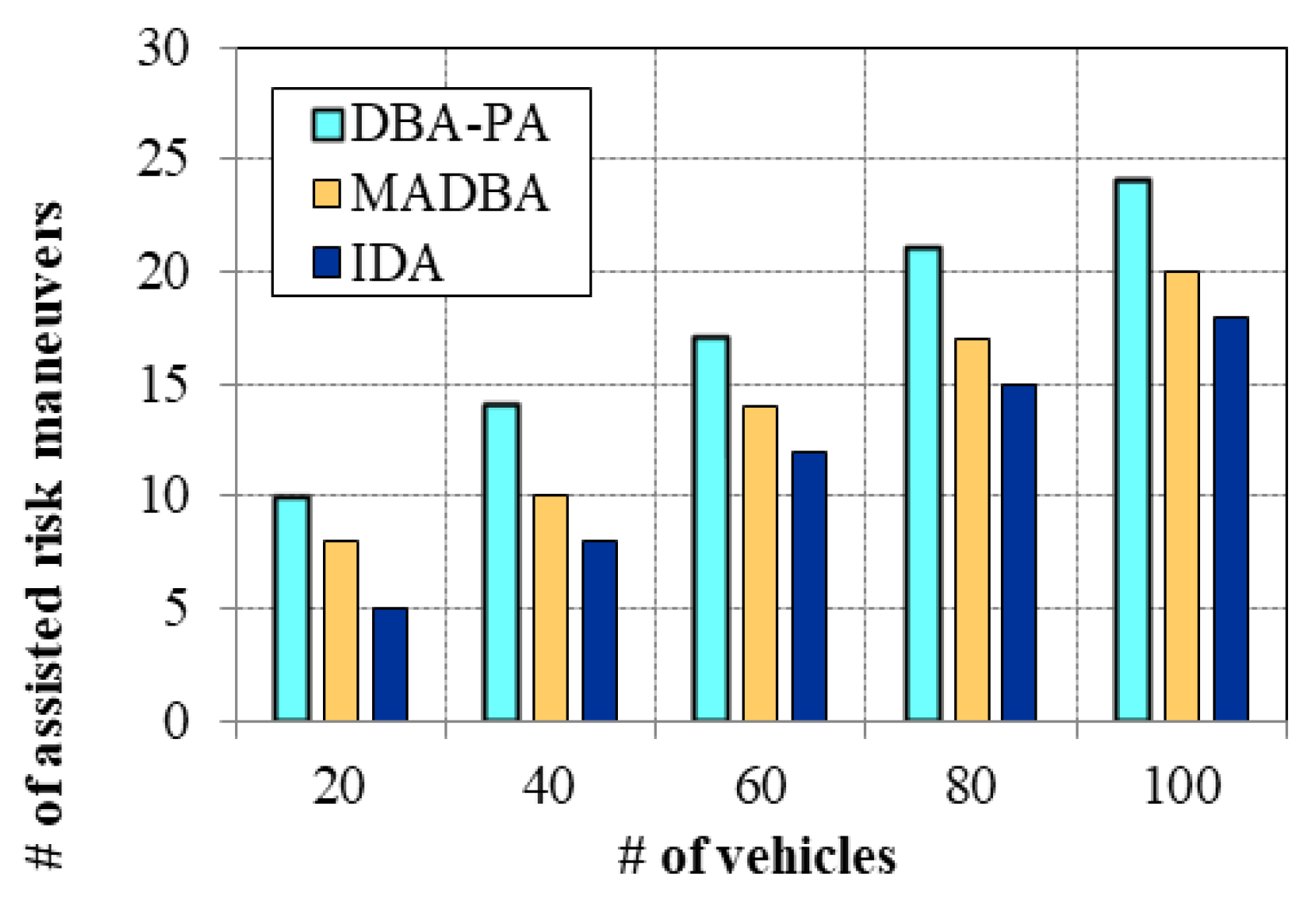
5.2.3. Impact of Assisted Risk Maneuvers
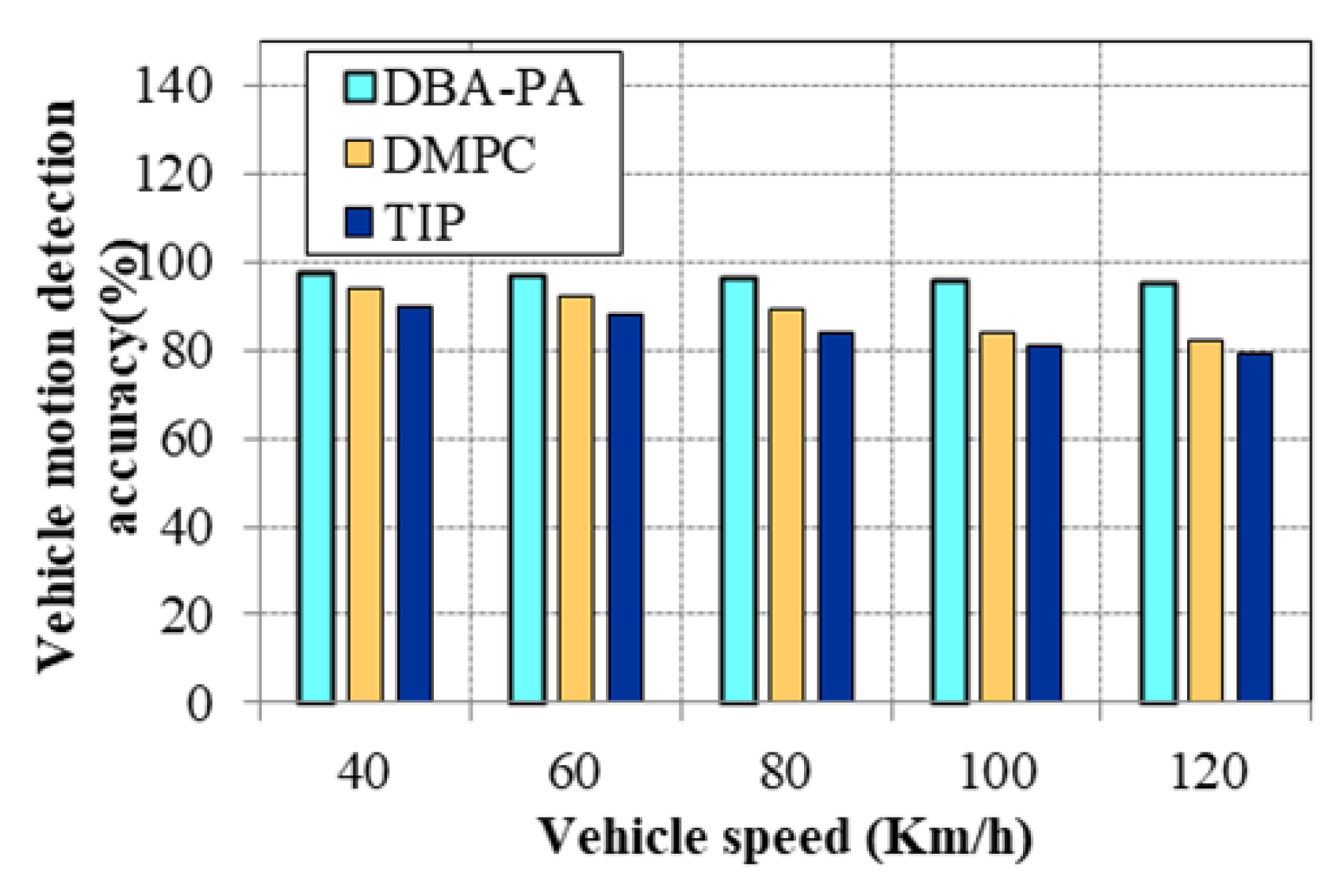
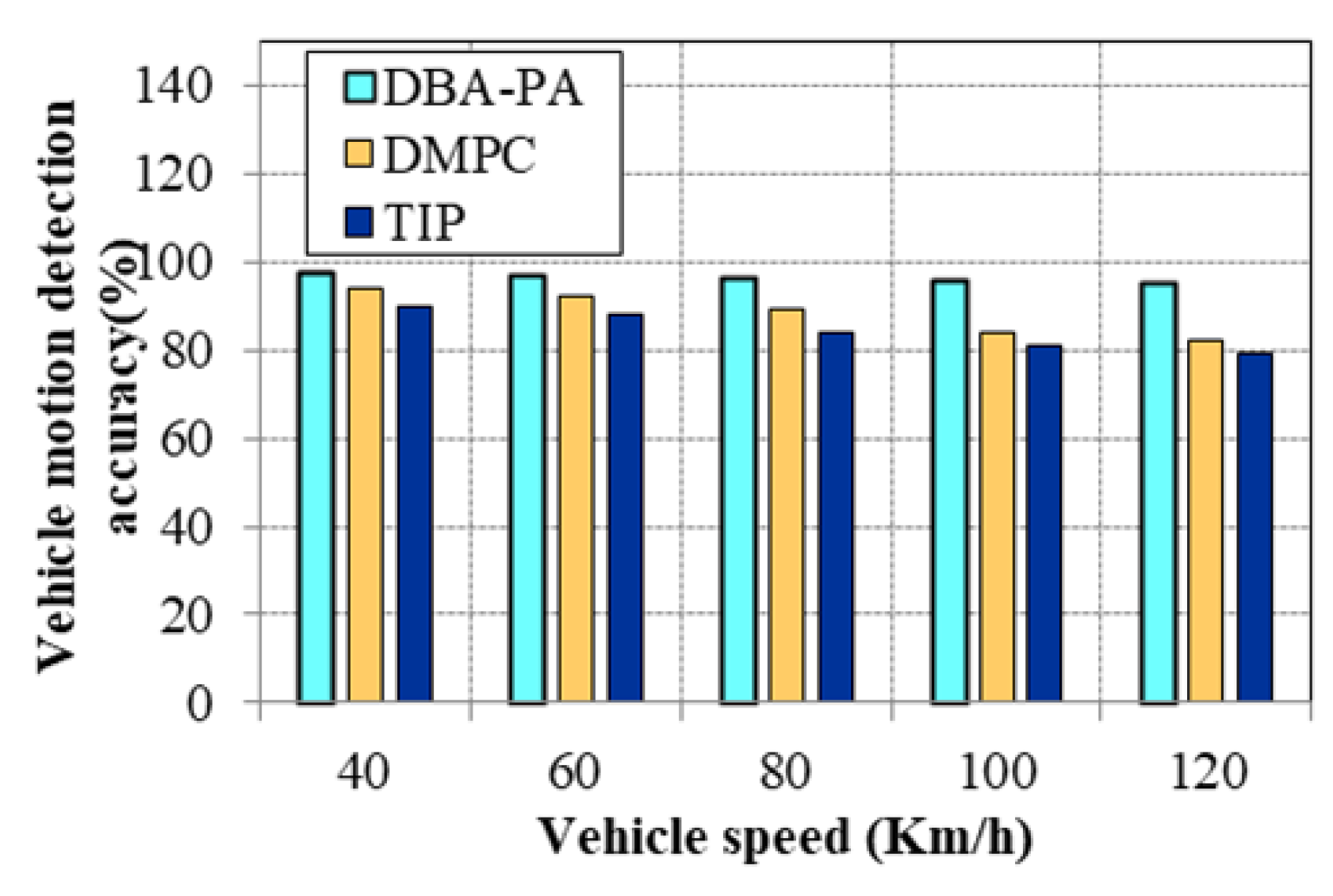
5.2.4. Impact of Vehicle-motion Detection Accuracy
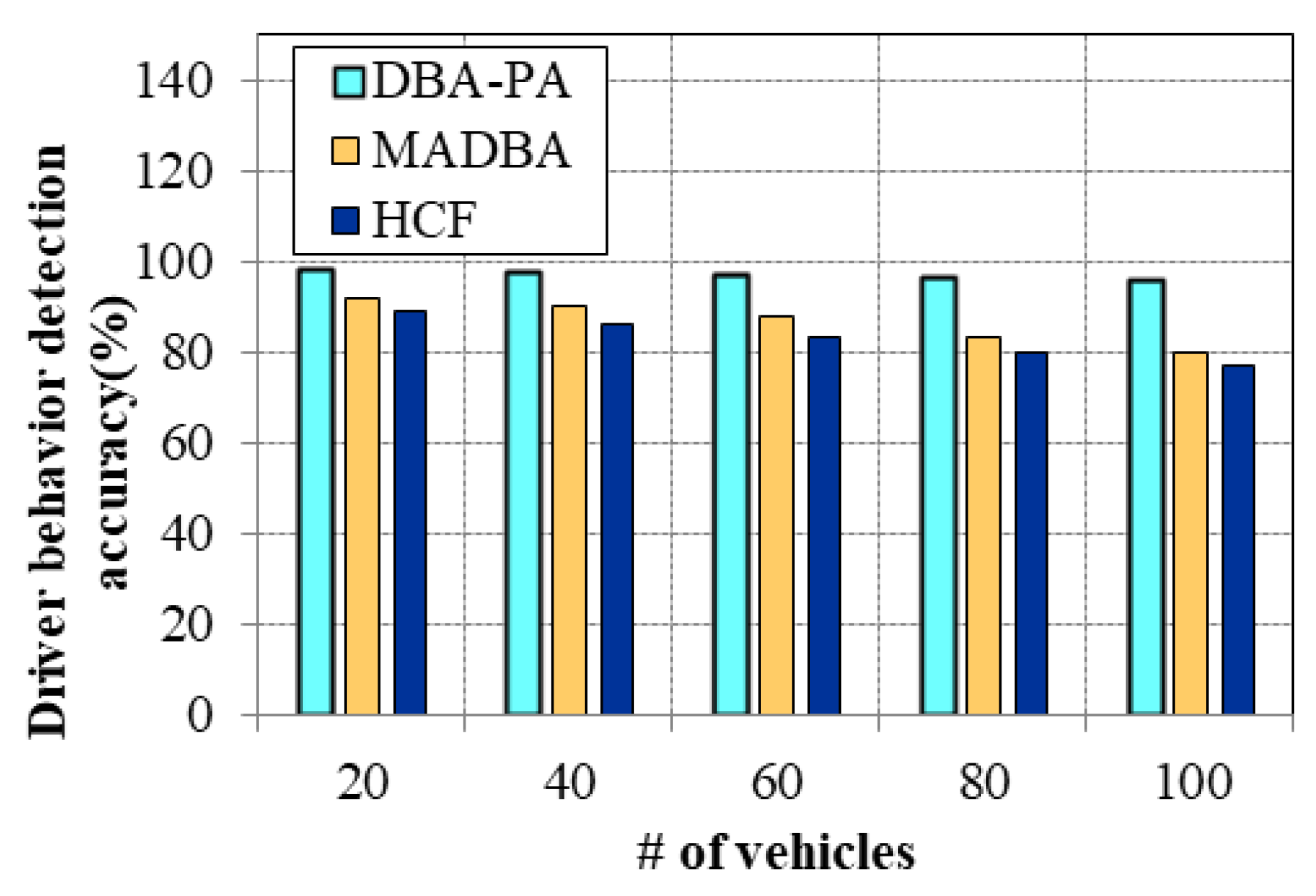
5.2.5. Impact of Driver-behavior Detection Accuracy
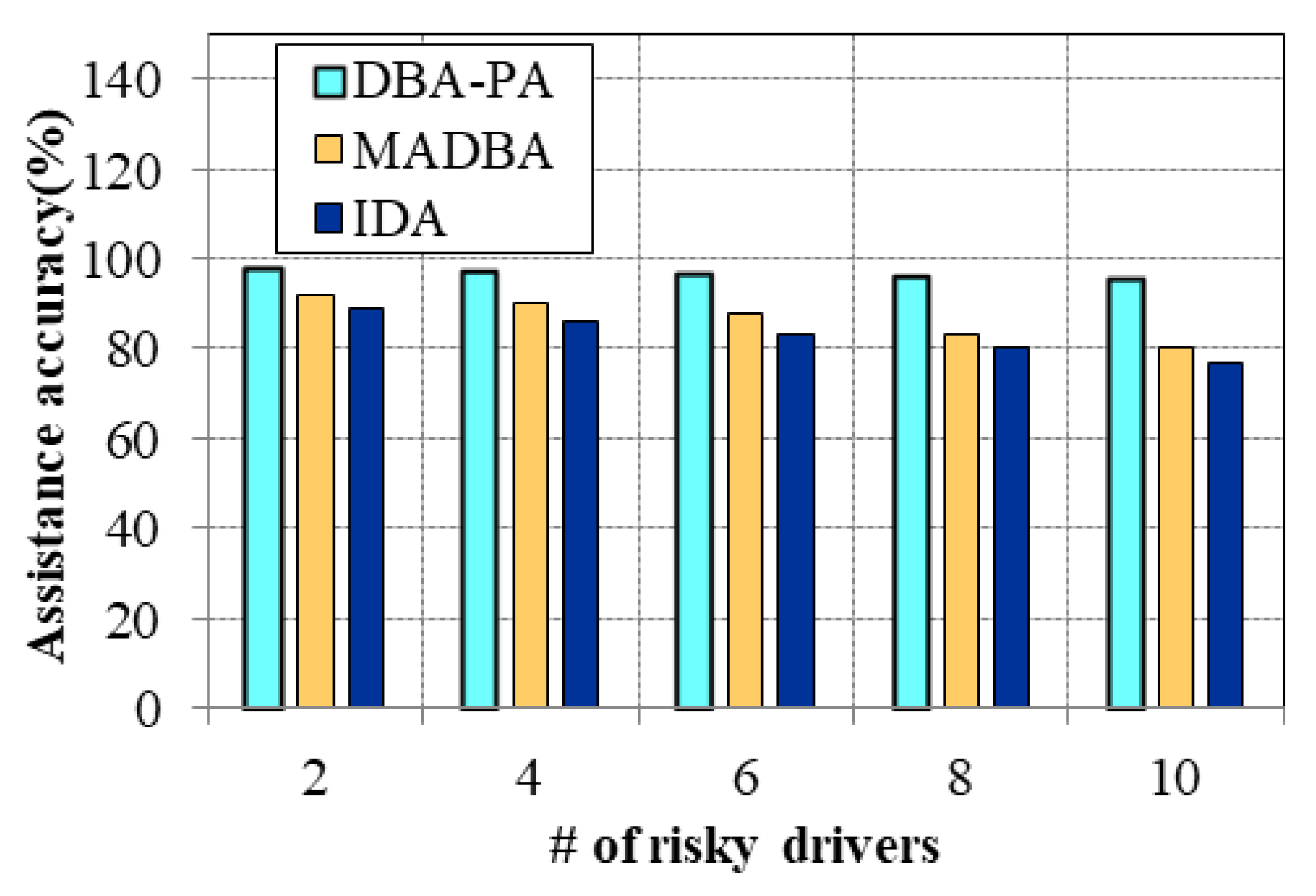
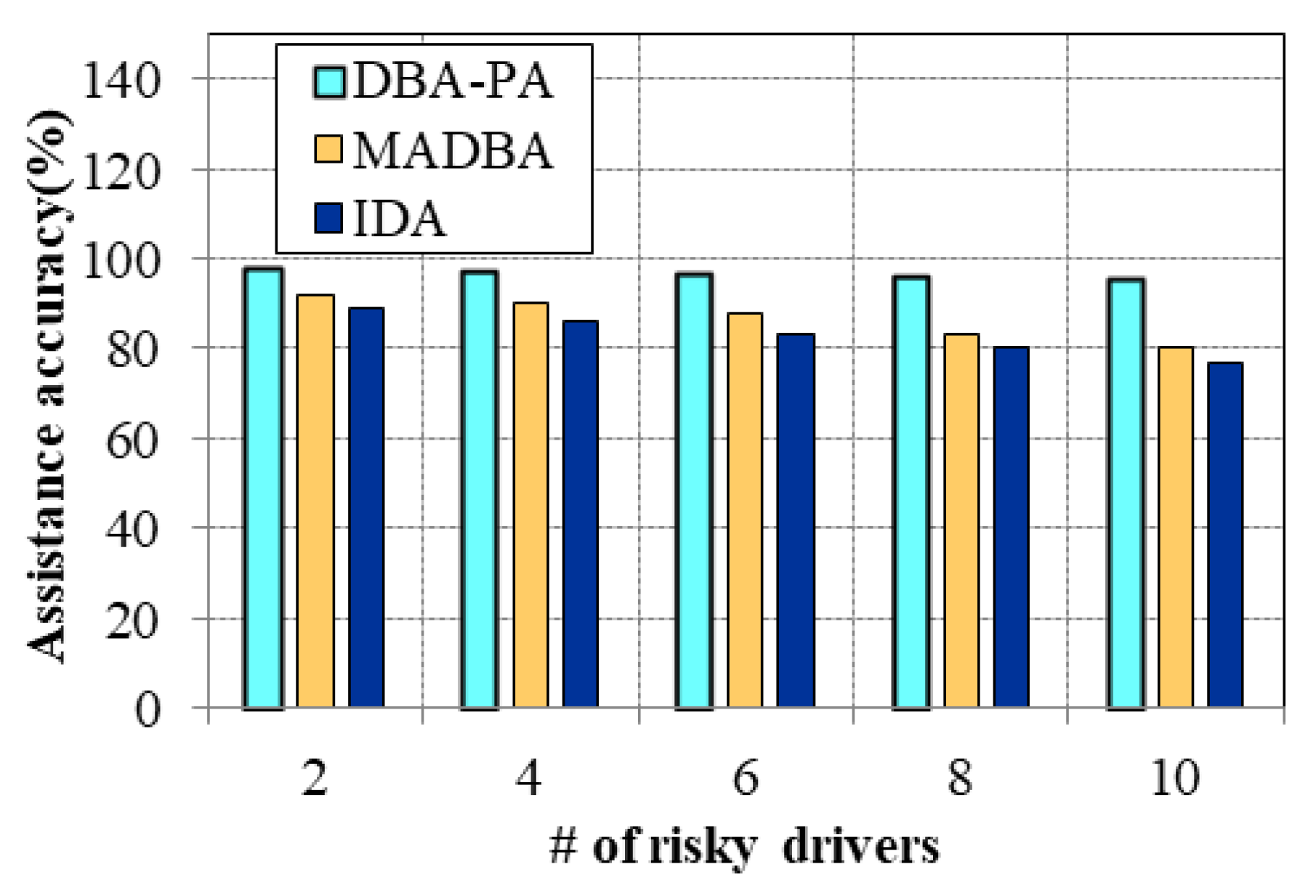
5.2.6. Impact of Assistance Accuracy
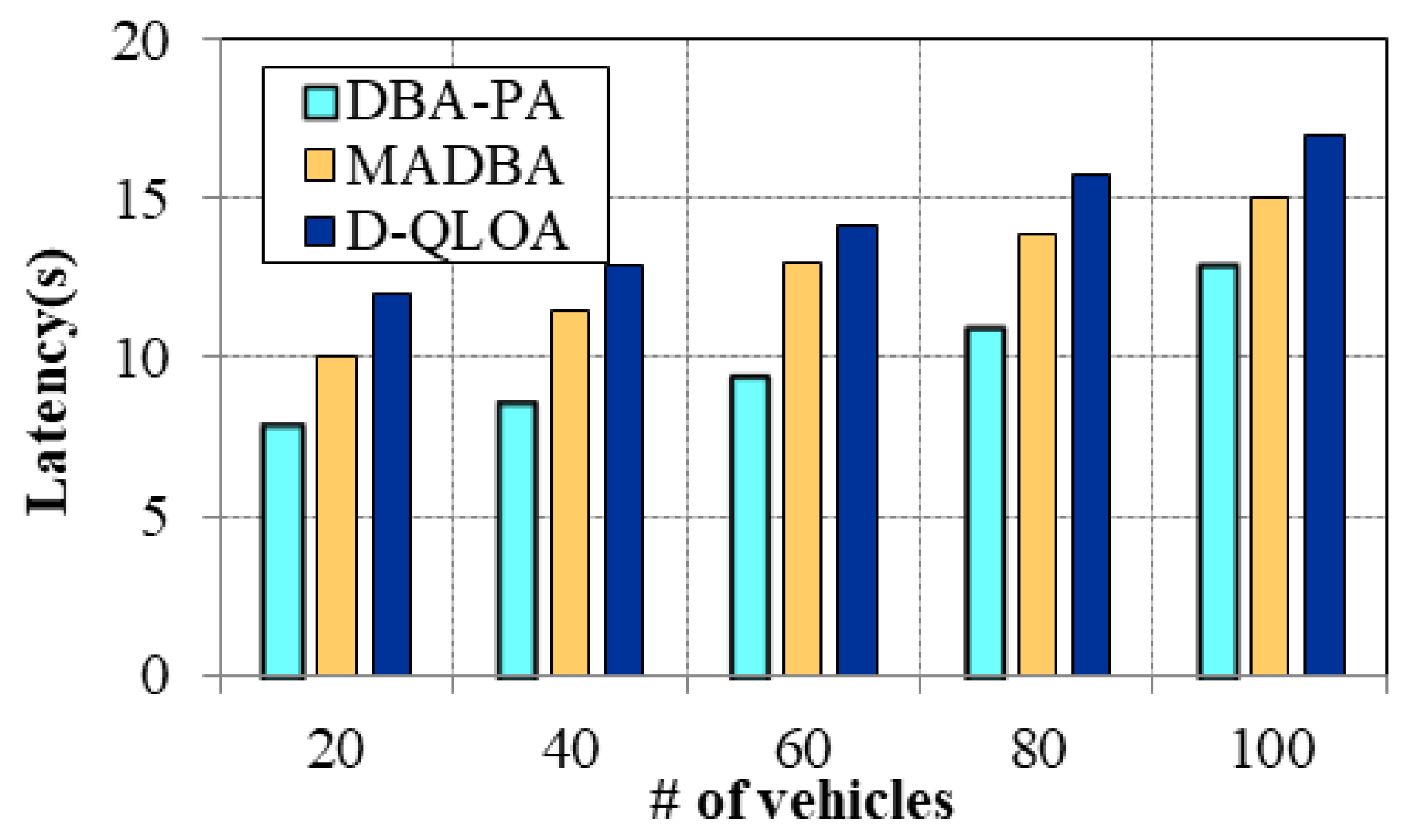
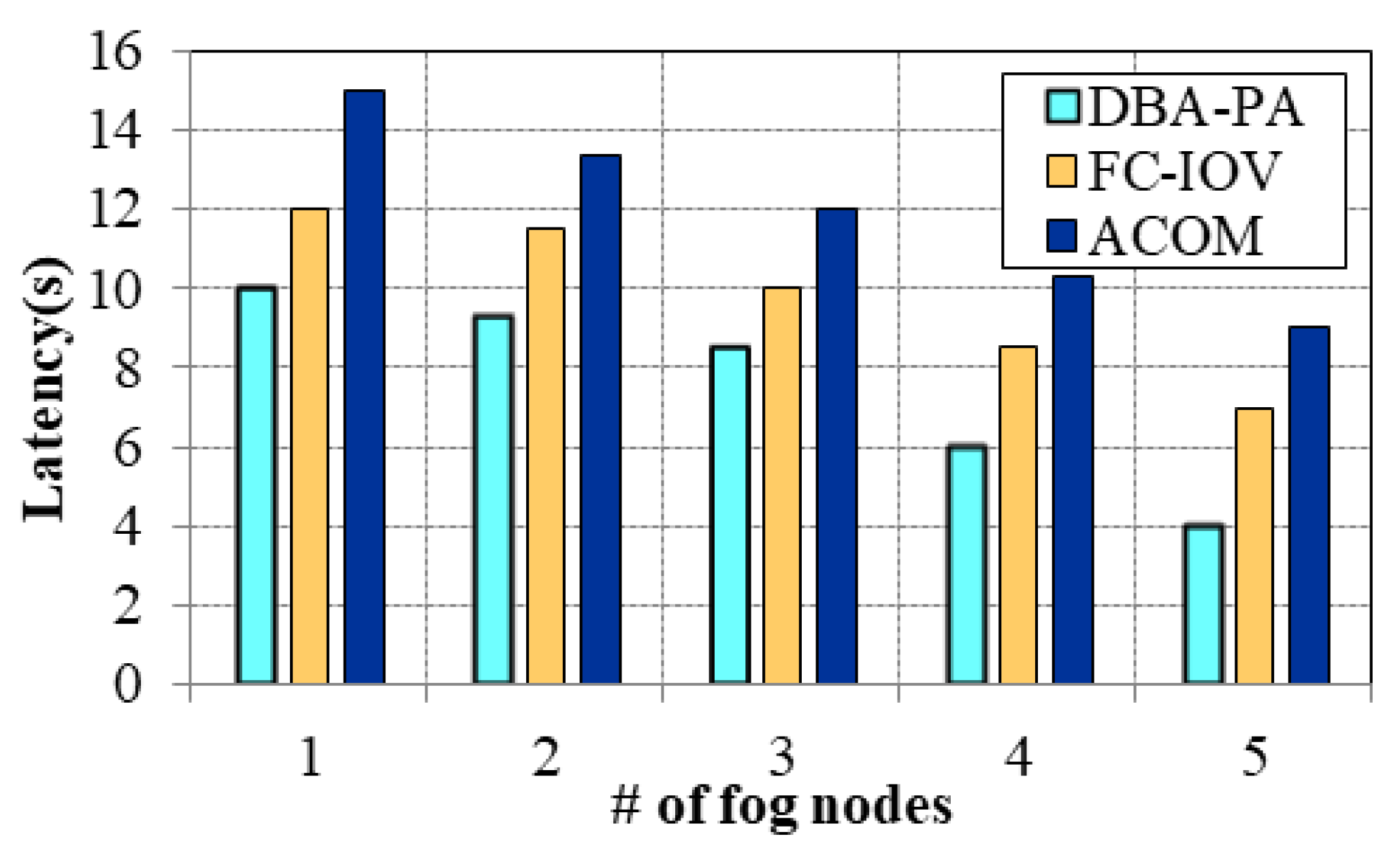
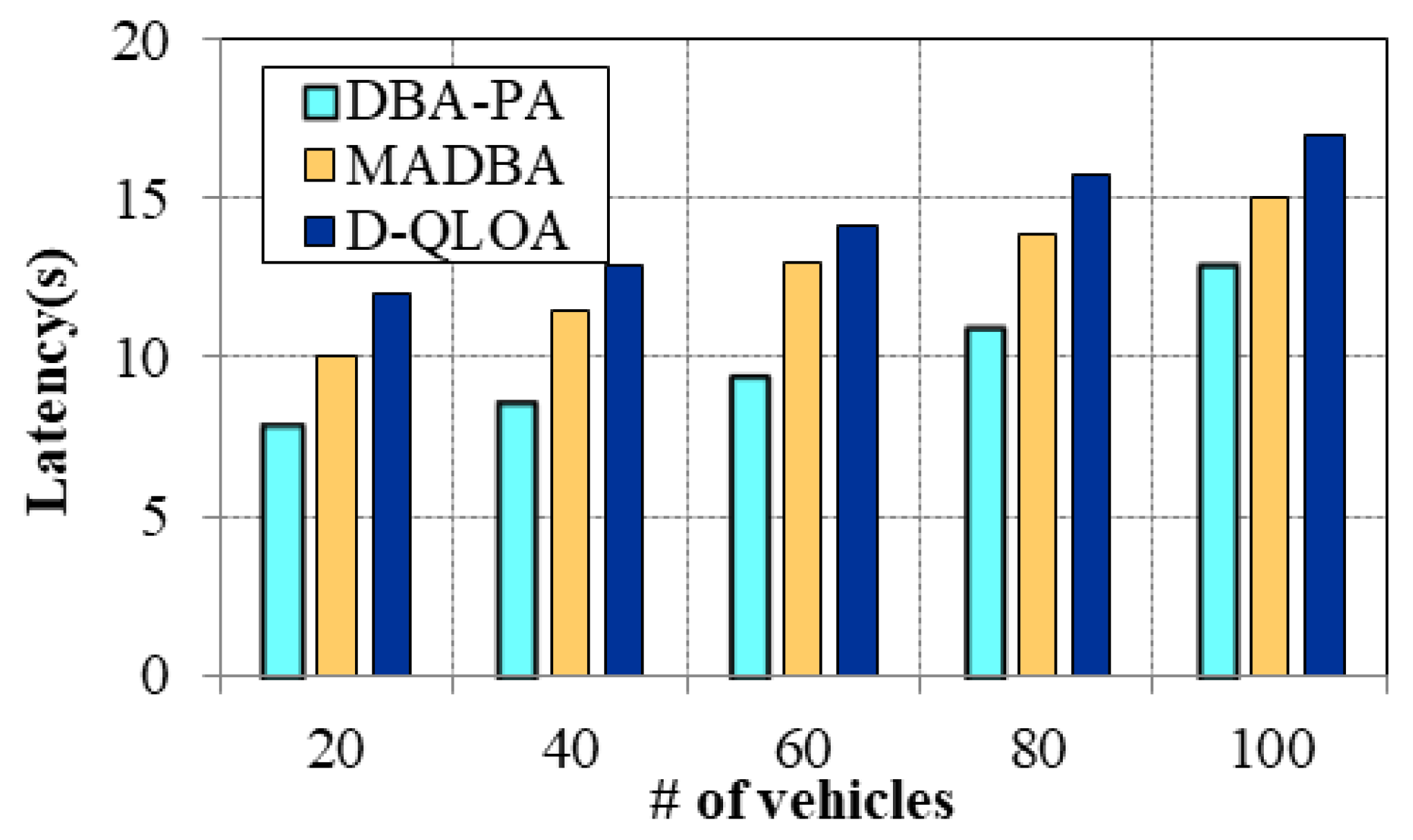
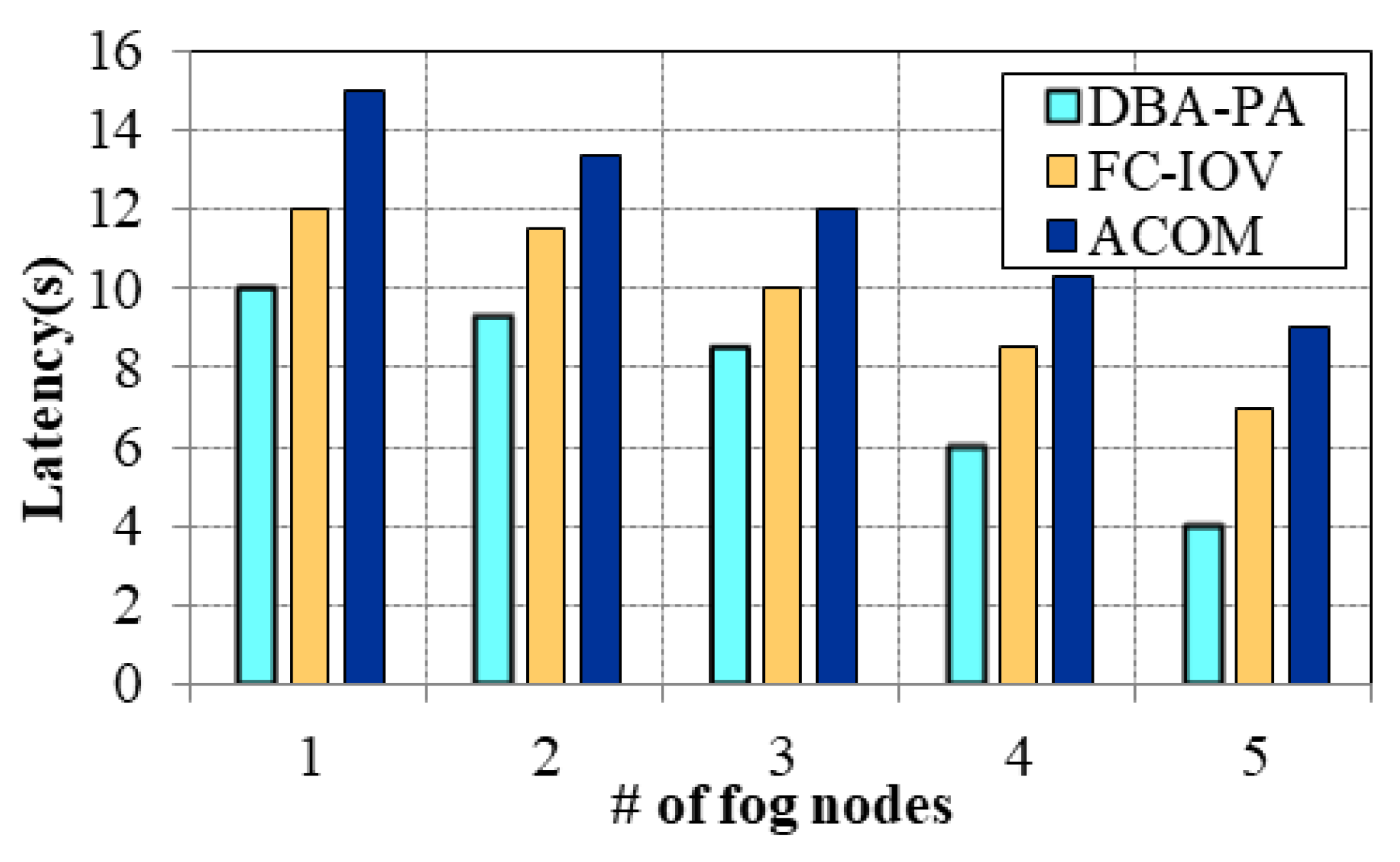
5.2.7. Impact of Latency
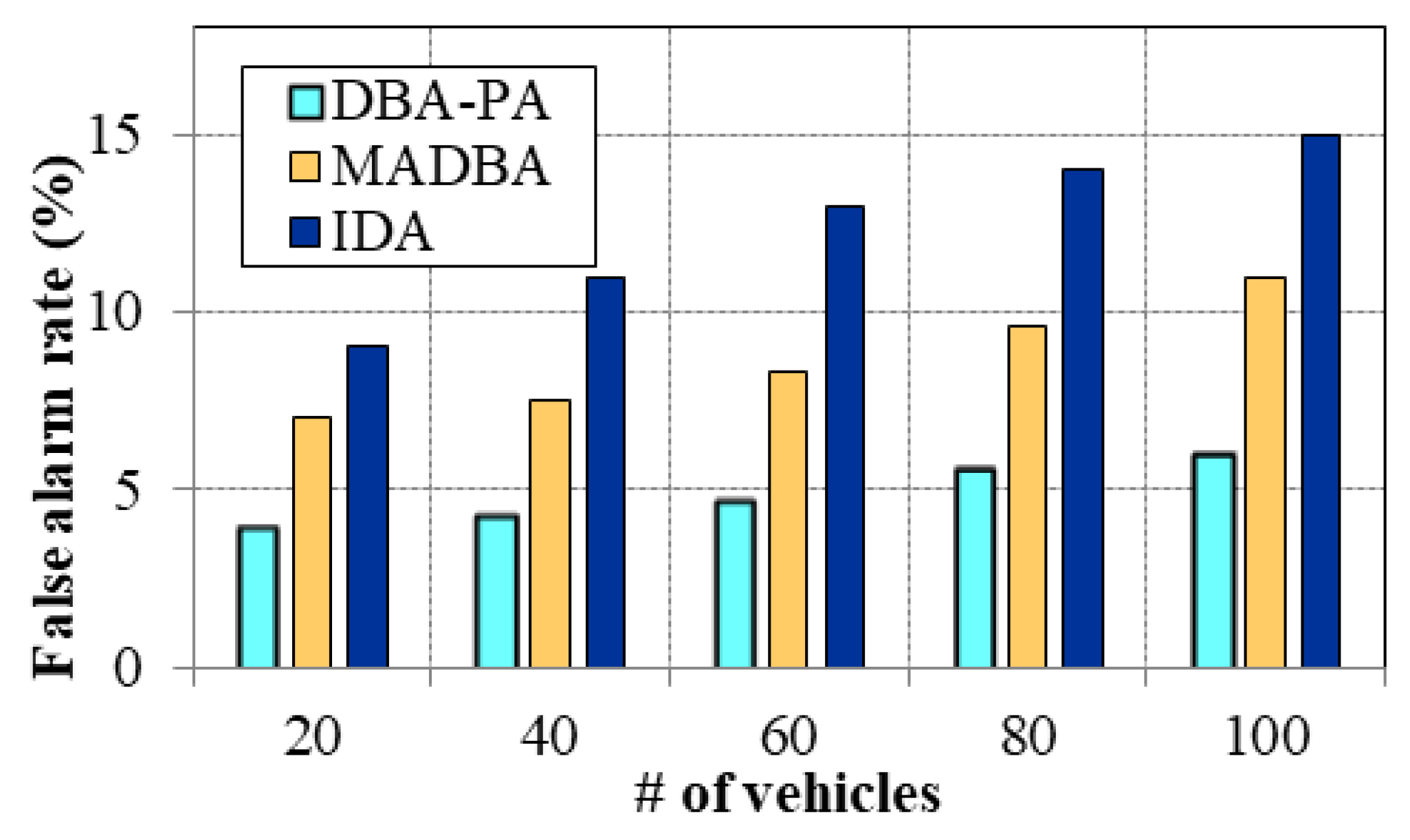
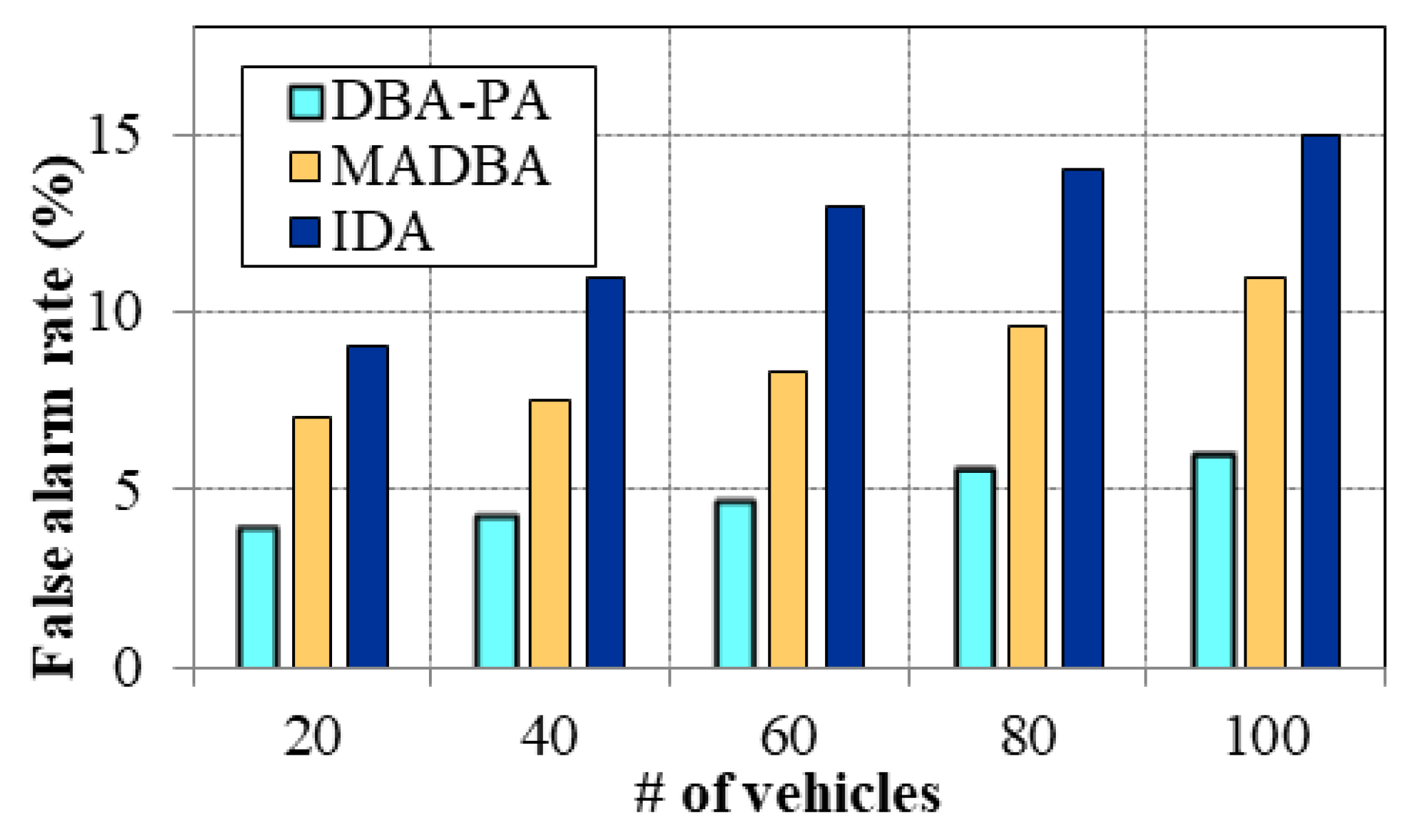
5.2.8. Impact of False Alarm Rate
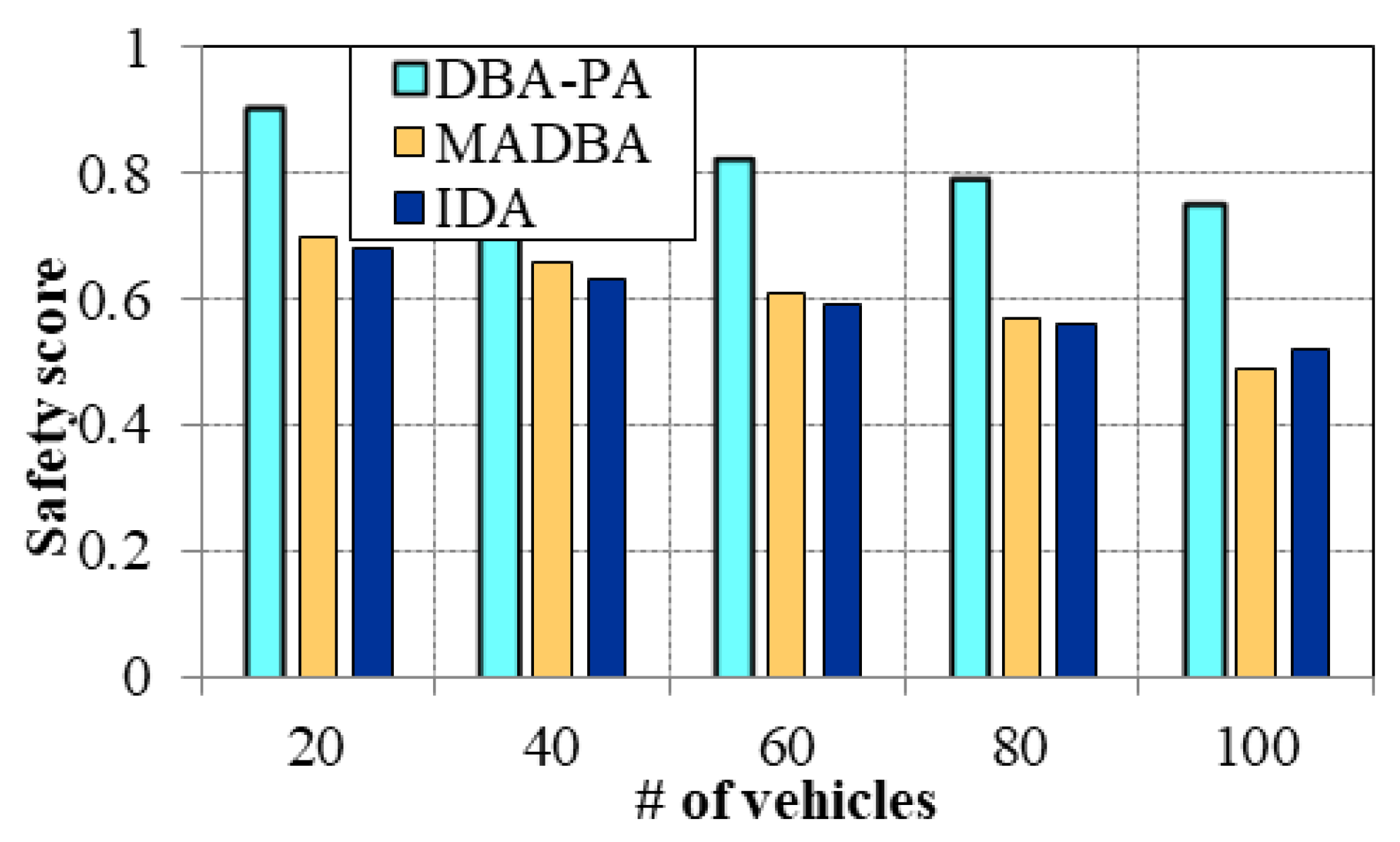
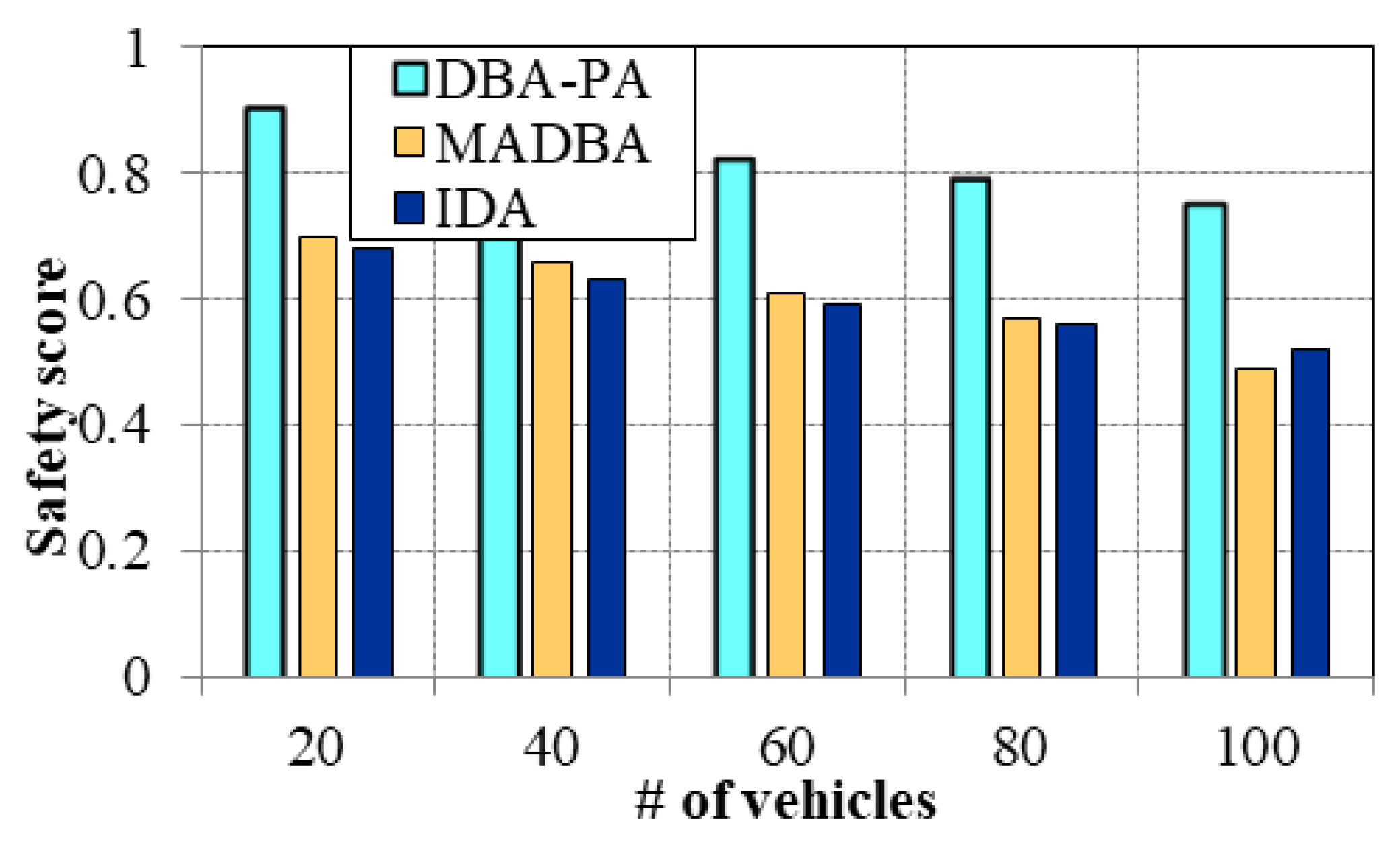
5.2.9. Impact of Safety Score
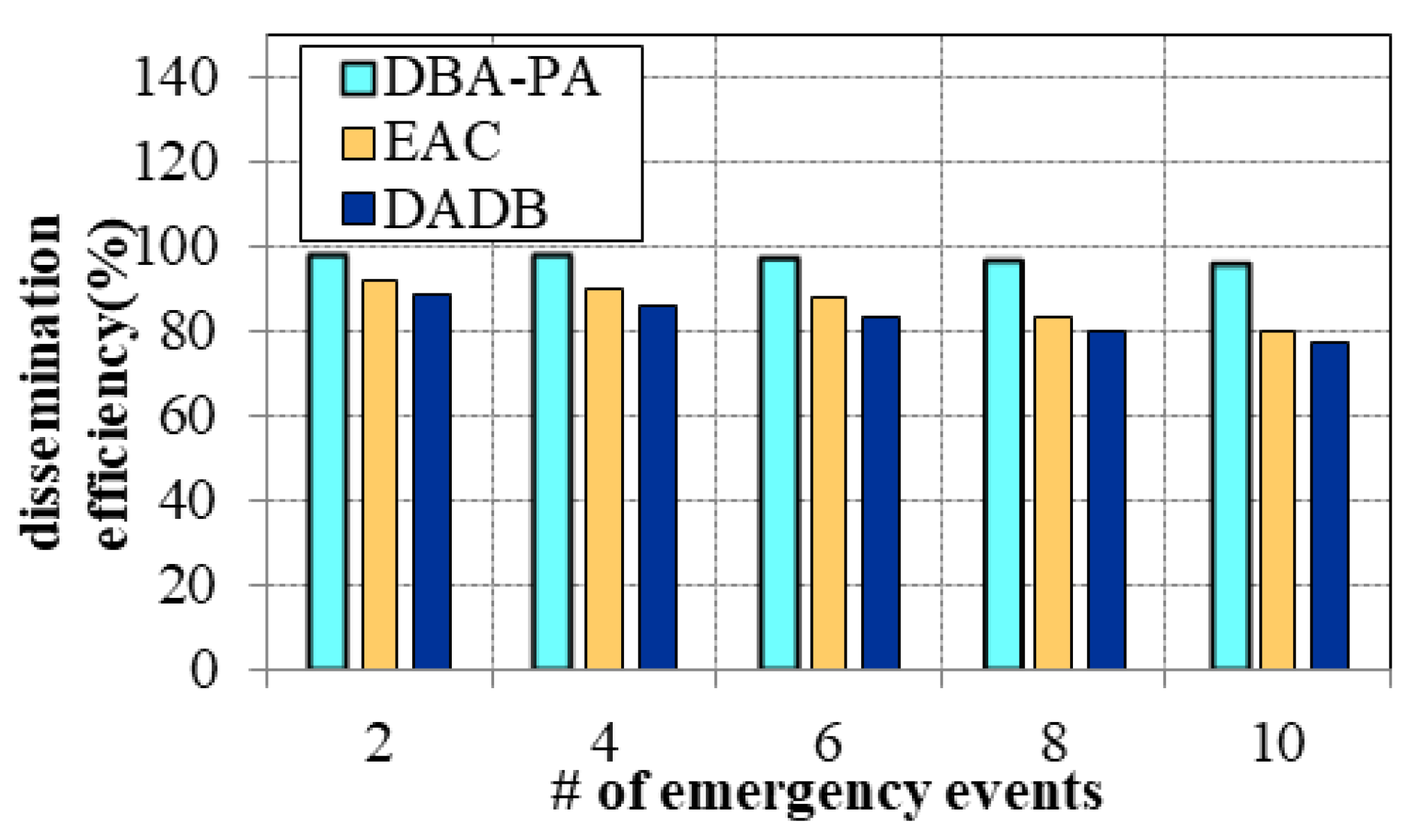
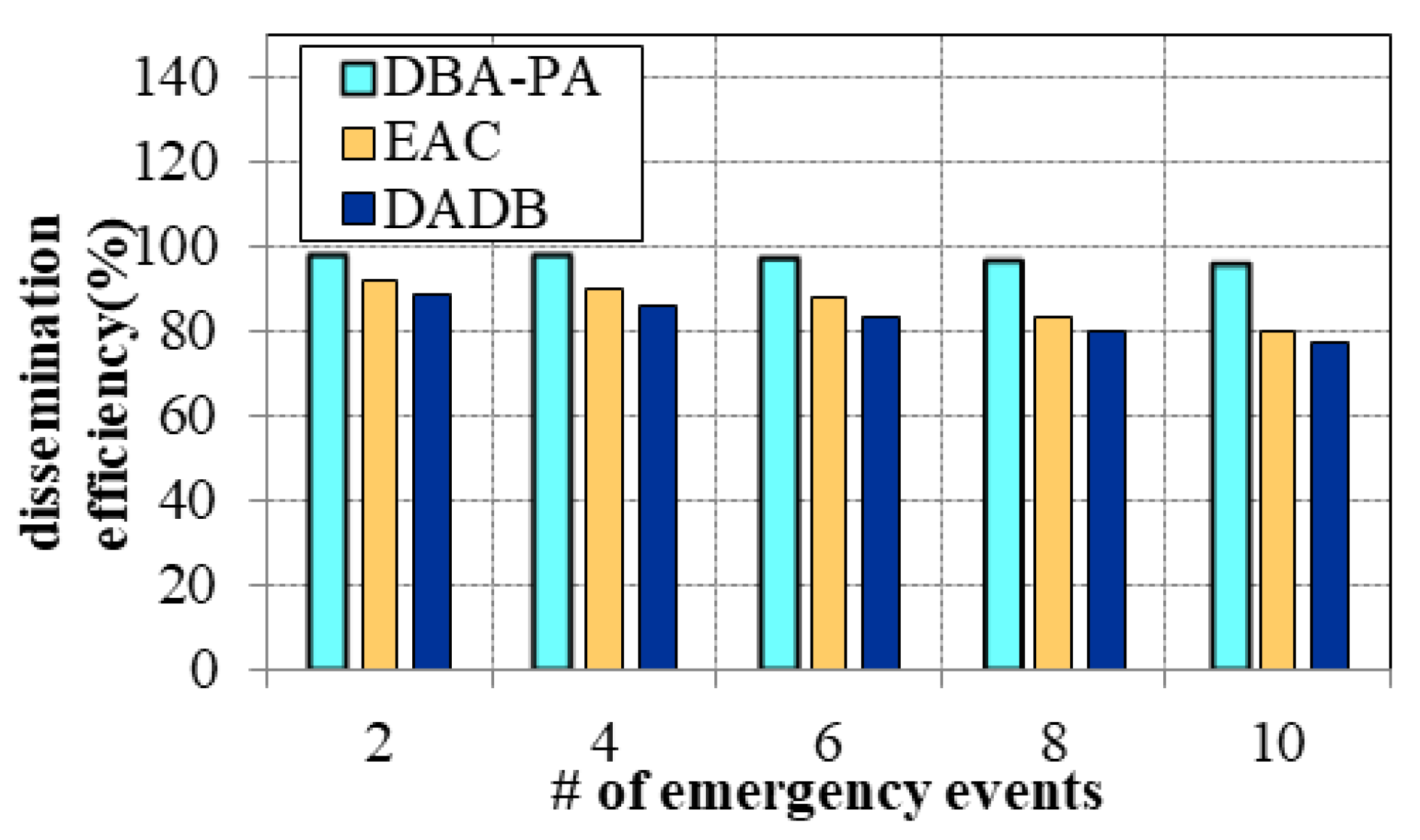
5.2.10. Impact of Alert-Message-Dissemination Accuracy
5.3. Research Highlights
- The complexity involved in computing driver behavior dynamically is reduced by performing with MCB-HCC, which is carried out by E-RSUs. Then, the mobility of vehicles in each cluster is predicted by AttResNet, by which the vehicles are classified into three classes of mobility.
- Driver behavior is analyzed on the basis of mobility, in which the behavior of a driver is analyzed by executing A3C from several physiological features of the driver, vehicular features, and environmental features of the surrounding environment. Here, driver behavior is detected accurately and classified into several states.
- Alert messages are disseminated if the driver is found to be in a state of emergency, which is performed by the JSO Algorithm, in which the messages are disseminated in order to ensure safety to other surrounding vehicles both within the cluster and in a nearby region.
- Personalized assistance is provided to the driver on the basis of the detected current state, which is executed by the multi-attribute utility model. The assistance is provided by utilizing the current location information of the vehicle, and assistance is provided for one or more detected driver states. Instances of assistance are stored in a cloud server for training purposes.
5.4. Limitation and Discussion
6. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, X.; Han, S.; Yang, L.; Yao, T.; Li, L. Parallel Internet of Vehicles: ACP-Based System Architecture and Behavioral Modeling. IEEE Int. Things J. 2020, 7, 3735–3746. [Google Scholar] [CrossRef]
- Min, H.; Yang, Y.; Fang, Y.; Sun, P.; Zhao, X. Constrained Optimization and Distributed Model Predictive Control-Based Merging Strategies for Adjacent Connected Autonomous Vehicle Platoons. IEEE Access 2019, 7, 163085–163096. [Google Scholar] [CrossRef]
- Ashkrof, P.; Correia, G.H.D.A.; Cats, O.; van Arem, B. Understanding ride-sourcing drivers’ behaviour and preferences: Insights from focus groups analysis. Res. Transp. Bus. Manag. 2020, 37, 100516. [Google Scholar] [CrossRef]
- Dua, I.; Nambi, A.U.; Jawahar, C.V.; Padmanabhan, V.N. Evaluation and Visualization of Driver Inattention Rating From Facial Features. IEEE Trans. Biom. Behav. Identit Sci. 2020, 2, 98–108. [Google Scholar] [CrossRef]
- Bichicchi, A.; Belaroussi, R.; Simone, A.; Vignali, V.; Lantieri, C.; Li, X. Analysis of Road-User Interaction by Extraction of Driver Behavior Features Using Deep Learning. IEEE Access 2020, 8, 19638–19645. [Google Scholar] [CrossRef]
- Zheng, Y.; Wang, J.; Li, K. Smoothing Traffic Flow via Control of Autonomous Vehicles. IEEE Internet Things J. 2020, 7, 3882–3896. [Google Scholar] [CrossRef] [Green Version]
- Gao, J.; Agyekum, K.O.-B.O.; Sifah, E.B.; Acheampong, K.N.; Xia, Q.; Du, X.; Guizani, M.; Xia, H. A Blockchain-SDN-Enabled Internet of Vehicles Environment for Fog Computing and 5G Networks. IEEE Internet Things J. 2019, 7, 4278–4291. [Google Scholar] [CrossRef]
- García-Herrero, S.; Gutiérrez, J.; Herrera, S.; Azimian, A.; Mariscal, M. Sensitivity analysis of driver’s behavior and psychophysical conditions. Saf. Sci. 2020, 125, 104586. [Google Scholar] [CrossRef]
- Peng, L.; Sotelo, M.A.; He, Y.; Ai, Y.; Li, Z. Rough Set Based Method for Vehicle Collision Risk Assessment Through Inferring Driver’s Braking Actions in Near-Crash Situations. IEEE Intell. Transp. Syst. Mag. 2019, 11, 54–69. [Google Scholar] [CrossRef]
- Alkinani, M.H.; Khan, W.Z.; Arshad, Q. Detecting Human Driver Inattentive and Aggressive Driving Behavior Using Deep Learning: Recent Advances, Requirements and Open Challenges. IEEE Access 2020, 8, 105008–105030. [Google Scholar] [CrossRef]
- Chen, G.; Chen, S.; Langari, R.; Li, X.; Zhang, W.-G. Driver-Behavior-Based Adaptive Steering Robust Nonlinear Control of Unmanned Driving Robotic Vehicle with Modeling Uncertainties and Disturbance Observer. IEEE Trans. Veh. Technol. 2019, 68, 8183–8190. [Google Scholar] [CrossRef]
- Wan, Q.; Peng, G.; Li, Z.; Inomata, F.; Zheng, Y.; Liu, Q. Using Asymmetric Theory to Identify Heterogeneous Drivers’ Behavior Characteristics Through Traffic Oscillation. IEEE Access 2019, 7, 106284–106294. [Google Scholar] [CrossRef]
- Wu, H.; Zhang, J.; Cai, Z.; Liu, F.; Li, Y.; Liu, A. Toward Energy-Aware Caching for Intelligent Connected Vehicles. IEEE Internet Things J. 2020, 7, 8157–8166. [Google Scholar] [CrossRef]
- Bouhoute, A.; Oucheikh, R.; Boubouh, K.; Berrada, I. Advanced Driving Behavior Analytics for an Improved Safety Assessment and Driver Fingerprinting. IEEE Trans. Intell. Transp. Syst. 2018, 20, 2171–2184. [Google Scholar] [CrossRef]
- Vu, D.-N.; Dao, N.-N.; Na, W.; Cho, S. Dynamic Resource Orchestration for Service Capability Maximization in Fog-Enabled Connected Vehicle Networks. IEEE Trans. Cloud Comput. 2020, 6, 2168–7161. [Google Scholar] [CrossRef]
- Zhou, R.; Zhang, Y.; Shi, Y. Driv0065r’s distracted behavior: The contribution of compensatory beliefs increases with higher perceived risk. Int. J. Ind. Ergon. 2020, 80, 103009. [Google Scholar] [CrossRef]
- Atallah, R.F.; Assi, C.M.; Khabbaz, M.J. Scheduling the Operation of a Connected Vehicular Network Using Deep Reinforcement Learning. IEEE Trans. Intell. Transp. Syst. 2018, 20, 1669–1682. [Google Scholar] [CrossRef]
- Khan, M.F.; Aadil, F.; Maqsood, M.; Bukhari, S.H.; Hussain, M.; Nam, Y. Moth Flame Clustering Algorithm for Internet of Vehicle (MFCA-IoV). IEEE Access 2019, 7, 11613–11629. [Google Scholar] [CrossRef]
- Bui, K.-H.N.; Jung, J.J. ACO-Based Dynamic Decision Making for Connected Vehicles in IoT System. IEEE Trans. Ind. Informatics 2019, 15, 5648–5655. [Google Scholar] [CrossRef]
- Chen, Y.; Lu, C.; Chu, W. A Cooperative Driving Strategy Based on Velocity Prediction for Connected Vehicles with Robust Path-Following Control. IEEE Internet Things J. 2020, 7, 3822–3832. [Google Scholar] [CrossRef]
- Li, L.; Gan, J.; Ji, X.; Qu, X.; Ran, B. Dynamic Driving Risk Potential Field Model Under the Connected and Automated Vehicles Environment and Its Application in Car-Following Modeling. IEEE Trans. Intell. Transp. Syst. 2020, 7, 1–20. [Google Scholar] [CrossRef]
- Chehreghani, M.H. Hierarchical Correlation Clustering and Tree Preserving Embedding. arXiv 2020, arXiv:abs/2002.07756. [Google Scholar]
- Mdrafi, R.H.; Du, Q.; Gurbuz, A.C.C.; Tang, B.; Ma, L.; Younan, N.H. Attention-Based Domain Adaptation Using Residual Network for Hyperspectral Image Classification. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 6424–6433. [Google Scholar] [CrossRef]
- Farhat, M.; Kamel, S.; Atallah, A.M.; Khan, B. Optimal Power Flow Solution Based on Jellyfish Search Optimization Considering Uncertainty of Renewable Energy Sources. IEEE Access 2021, 9, 100911–100933. [Google Scholar] [CrossRef]
- Wang, X.; Wang, H. Cluster Analysis for Driving Behavior of Dangerous Goods Transportation Based on Data Mining. IEEE Access 2020, 8, 11289–11296. [Google Scholar] [CrossRef]
- Escano, J.M.; Ridao-Olivar, M.A.; Ierardi, C.; Sanchez, A.J.; Rouzbehi, K. Driver Behavior Soft-Sensor Based on Neurofuzzy Systems and Weighted Projection on Principal Components. IEEE Sens. J. 2020, 20, 11454–11462. [Google Scholar] [CrossRef]
- Alamri, A.; Gumaei, A.; Al-Rakhami, M.; Hassan, M.M.; Alhussein, M.; Fortino, G. An Effective Bio-Signal-Based Driver Behavior Monitoring System Using a Generalized Deep Learning Approach. IEEE Access 2020, 8, 135037–135049. [Google Scholar] [CrossRef]
- Xu, X.; Zhang, X.; Liu, X.; Jiang, J.; Qi, L.; Alam Bhuiyan, Z. Adaptive Computation Offloading with Edge for 5G-Envisioned Internet of Connected Vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 22, 5213–5222. [Google Scholar] [CrossRef]
- Kashevnik, A.; Lashkov, I.; Gurtov, A. Methodology and Mobile Application for Driver Behavior Analysis and Accident Prevention. IEEE Trans. Intell. Transp. Syst. 2019, 21, 2427–2436. [Google Scholar] [CrossRef]
- Yang, D.; Xian, J.; Pan, L.; Wang, W.; Zhou, T. Effective Edge-Based Approach for Promoting the Spreading of Information. IEEE Access 2020, 8, 83745–83753. [Google Scholar] [CrossRef]
- Mase, J.M.; Majid, S.; Mesgarpour, M.; Torres, M.T.; Figueredo, G.P.; Chapman, P. Evaluating the impact of Heavy Goods Vehicle driver monitoring and coaching to reduce risky behaviour. Accid. Anal. Prev. 2020, 146, 105754. [Google Scholar] [CrossRef]
- Ni, D.; Guo, F.; Zhou, Y.; Shi, C. Determination of Risk Perception of Drivers Using Fuzzy-Clustering Analysis for Road Safety. IEEE Access 2020, 8, 125501–125512. [Google Scholar] [CrossRef]
- Huang, C.; Wang, X.; Cao, J.; Wang, S.; Zhang, Y. HCF: A Hybrid CNN Framework for Behavior Detection of Distracted Drivers. IEEE Access 2020, 8, 109335–109349. [Google Scholar] [CrossRef]
- Lu, C.; Hu, F.; Cao, D.; Gong, J.; Xing, Y.; Li, Z. Transfer Learning for Driver Model Adaptation in Lane-Changing Scenarios Using Manifold Alignment. IEEE Trans. Intell. Transp. Syst. 2019, 21, 3281–3293. [Google Scholar] [CrossRef]
- Zhang, H.; Fu, R. A Hybrid Approach for Turning Intention Prediction Based on Time Series Forecasting and Deep Learning. Sensors 2020, 20, 4887. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.; Jia, Y.; Wang, Y.; Dolezel, P. Development of Driver-Behavior Model Based onWOA-RBM Deep Learning Network. J. Adv. Transp. 2020, 2020, 8859891. [Google Scholar] [CrossRef]
- Wu, R.; Zheng, X.; Xu, Y.; Wu, W.; Li, G.; Xu, Q.; Nie, Z. Modified Driving Safety Field Based on Trajectory Prediction Model for Pedestrian–Vehicle Collision. Sustainability 2019, 11, 6254. [Google Scholar] [CrossRef] [Green Version]
- Woo, H.; Madokoro, H.; Sato, K.; Tamura, Y.; Yamashita, A.; Asama, H. Advanced Adaptive Cruise Control Based on Operation Characteristic Estimation and Trajectory Prediction. Appl. Sci. 2019, 9, 4875. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Wang, F.; Ke, H.; Wang, L.-L.; Xu, C.-C. A Driver’s Physiology Sensor-Based Driving Risk Prediction Method for Lane-Changing Process Using Hidden Markov Model. Sensors 2019, 19, 2670. [Google Scholar] [CrossRef] [Green Version]
- Lin, K.; Li, Y.; Deng, J.; Pace, P.; Fortino, G. Clustering-Learning-Based Long-Term Predictive Localization in 5G-Envisioned Internet of Connected Vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 22, 5232–5246. [Google Scholar] [CrossRef]
- Guo, H.; Liu, J.; Ren, J.; Zhang, Y. Intelligent Task Offloading in Vehicular Edge Computing Networks. IEEE Wirel. Commun. 2020, 27, 126–132. [Google Scholar] [CrossRef]
- Hong, Z.; Chen, Y.; Wu, Y. A driver behavior assessment and recommendation system for connected vehicles to produce safer driving environments through a “follow the leader” approach. Accid. Anal. Prev. 2020, 139, 105460. [Google Scholar] [CrossRef] [PubMed]
- Terán, J.; Navarro, L.; Quintero M., C.G.; Pardo, M. Intelligent Driving Assistant Based on Road Accident Risk Map Analysis and Vehicle Telemetry. Sensors 2020, 20, 1763. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Srivastava, A.; Prakash, A.; Tripathi, R. Fuzzy-based beaconless probabilistic broadcasting for information dissemination in urban VANET. Ad Hoc Networks 2020, 108, 102285. [Google Scholar] [CrossRef]
- Matousek, M.; El-Zohairy, M.; Al-Momani, A.; Kargl, F.; Bösch, C. Detecting Anomalous Driving Behavior using Neural Networks. In Proceedings of the 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 9–12 June 2019; p. 2229-2. [Google Scholar]
- Behrisch, M.; Bieker, L.; Erdmann, J.; Krajzewicz, D. SUMO—Simulation of urban mobility: An overview. In Proceedings of the Third International Conference on Advances in System Simulation. ThinkMind (SIMUL 2011), Barcelona, Spain, 23–28 October 2011; IARIA XPS Press: København, Denmark, 2011. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | Objective | Input Parameters | Algorithm/Setup Used | Features Extracted/ Working | Limitations | ||
|---|---|---|---|---|---|---|---|
| Physiological | Vehicular | Environment | |||||
| [25] | Behavior analysis | ✕ | ✓ | ✕ | Genetic algorithm-fuzzy-C mean clustering (GA-FCM) | Acceleration and deceleration Over speed Operational stability | Lack of consideration of adequate information results in inefficient behavior identification |
| [26] | Behavior analysis | ✕ | ✓ | ✕ | Neuro-fuzzy system with principal component analysis (FIS-PCA) | Speed Acceleration Inertial measurements | Driver is classified as drowsy without considering physical information, which increases false alarm rate. |
| [27] | Behavior analysis | ✓ | ✕ | ✓ | Deep convolutional neural network (DCNN) | Heart rate Blood pressure Driver action | Feedback provided by this model is very limited, and latency is high as processing is performed in cloud. |
| [28] | Edge offloading | - | - | - | Multi-objective evolutionary algorithm based decomposition (MOEA/D) | Generates optimal solutions to increase resource utilization and reduce delay | Not suitable for large-scale, real-time environment in which increased computation results in overloading. |
| [29] | Behavior analysis | ✓ | ✓ | ✕ | Smartphone mobile application | Forehead color Head movements Vehicle position Speed Speech input | This assistance gets disturbed due to connectivity problems in remote areas, and installation of application is required for new drivers. |
| [30] | Edge offloading | - | - | - | Latent-edge-influence strategy (LEI) | Effective performance in spreading information based on SIR information | Potential influence calculated for deployment of latent edge is not sufficient as it does not consider communication delay. |
| [31] | Driver monitoring | ✕ | ✓ | ✓ | Analysis of variance (ANOVA) | Harsh breaking Harsh cornering Over speeding | Harsh conditions cannot be identified accurately as this approach uses only camera sensor. |
| [32] | Risk evaluation | ✕ | ✓ | ✕ | Fuzzy cluster analysis (FCA) | Velocity Brake pedal Wheel steering Longitudinal acceleration | Risk assessment is based on age group only; lack of consideration of driver’s physical information provides inaccurate results. |
| [33] | Behavior analysis | ✕ | ✓ | ✕ | Hybrid convolutional neural network framework combining residual neural network 50, Inception version 3, and Xception | Face expressions Eye movement Hand gestures Speech features | Distracted behavior of driver is detected using only image and audio inputs, but there are other physical factors that contribute to distraction. |
| [34] | Driver model analysis | ✕ | ✓ | ✕ | Dynamic time warping with local procures analysis (DTW-LPA) | Steering angle Front wheel angle | Driver model adaptation technique does not consider driver behavior during uncertain situations |
| [35] | Behavior analysis | ✕ | ✓ | ✕ | Auto regressive integrated moving average (ARIMA) | Lateral velocity Lateral acceleration Heading angle | This system predicts only turning intention, which will not fully reduce road casualties. |
| [36] | Behavior analysis | ✕ | ✓ | ✓ | Whale optimization algorithm-restricted Boltzmann machine (WOA-RBM) | Road geometry Weather condition Speed Energy | Model is based on acceleration and deceleration of vehicle but does not consider steering properties. |
| [37] | Collision avoidance and risk assessment | ✕ | ✓ | ✕ | Advanced adaptive cruise control system | Position Speed | Provides collision control and risk assessment only in cut-in situations. |
| [38] | Behavior analysis and risk prediction | ✓ | ✓ | ✕ | Hidden Markov model (HMM) | ECG data Eye movement data Vehicle speed and dynamics | Risk prediction accuracy does not consider traffic conditions, which reduces accuracy. |
| Feature Type | Feature Name | Range |
|---|---|---|
| Physiological | Pulse rate | 50–110 (ppm) |
| EEG rate | 8–13 Hz | |
| Respiratory rate | 12–20 (bpm) | |
| Rhythm | Yes | |
| Q wave | 0.15 | |
| ST elevation | 0.13 | |
| ST depression | 0.16 | |
| Vehicular | Speed | 40–80 km |
| Longitudinal acceleration | ||
| Yaw angle rate | ||
| Position | (Latitude, Longitude) | |
| Moving direction | (North, South) | |
| Environmental | Traffic density | 15 vehicles/Km |
| Accidents | 4 incidents till now | |
| Weather condition | Sunny |
| Parameters | Description |
|---|---|
| Network parameters | |
| Area of simulation | 2450 * 2450 m |
| Simulation time | 400 s |
| Number of cloud nodes | 1 |
| Number of fog nodes | 4 |
| Number of E-RSUs | 4 |
| Number of vehicles | 100 |
| Mobility model | Random way point |
| Range of transmission | 210–260 m |
| Type of traffic | Traffic control interface model |
| Total number of packets | 8000 (approx.) |
| Size of packet | 512 bytes |
| Transport protocol | TCP |
| Rate of transmission | 250 Mbps |
| Algorithm Parameters | |
| MCB-HCC | |
| 20 | |
| 20 | |
| 0.85 | |
| 0.05 | |
| AttResNet | |
| 0.04 | |
| Optimizer | Adam |
| 0.91 | |
| 0.993 | |
| Learning rate | 0.0001 |
| Drop rate | 0.2 |
| Batch size | 32 |
| A3C | |
| Discount factor | 0.97 |
| Optimizer | Stochastic gradient descent |
| Buffer size | |
| Learning rate | |
| Batch size | 32 |
| Soft update factor | |
| JSO | |
| 100 | |
| 10,000 | |
| Algorithms | Time Complexity | Description |
|---|---|---|
| ACO Algorithm [19] | O(n2) | n represents iterations |
| Genetic Algorithm [25] | O(gnm) | g denotes generation, n denotes size of population and m denotes the individuals’ size |
| WO Algorithm [36] | O(N*D) | N denotes population and D denotes dimension |
| JSO Algorithm | O(n) | n denotes the position |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alowish, M.; Shiraishi, Y.; Mohri, M.; Morii, M. Three Layered Architecture for Driver Behavior Analysis and Personalized Assistance with Alert Message Dissemination in 5G Envisioned Fog-IoCV. Future Internet 2022, 14, 12. https://doi.org/10.3390/fi14010012
Alowish M, Shiraishi Y, Mohri M, Morii M. Three Layered Architecture for Driver Behavior Analysis and Personalized Assistance with Alert Message Dissemination in 5G Envisioned Fog-IoCV. Future Internet. 2022; 14(1):12. https://doi.org/10.3390/fi14010012
Chicago/Turabian StyleAlowish, Mazen, Yoshiaki Shiraishi, Masami Mohri, and Masakatu Morii. 2022. "Three Layered Architecture for Driver Behavior Analysis and Personalized Assistance with Alert Message Dissemination in 5G Envisioned Fog-IoCV" Future Internet 14, no. 1: 12. https://doi.org/10.3390/fi14010012
APA StyleAlowish, M., Shiraishi, Y., Mohri, M., & Morii, M. (2022). Three Layered Architecture for Driver Behavior Analysis and Personalized Assistance with Alert Message Dissemination in 5G Envisioned Fog-IoCV. Future Internet, 14(1), 12. https://doi.org/10.3390/fi14010012