Smart Site Diversity for a High Throughput Satellite System with Software-Defined Networking and a Virtual Network Function


Abstract
:1. Introduction
2. Background
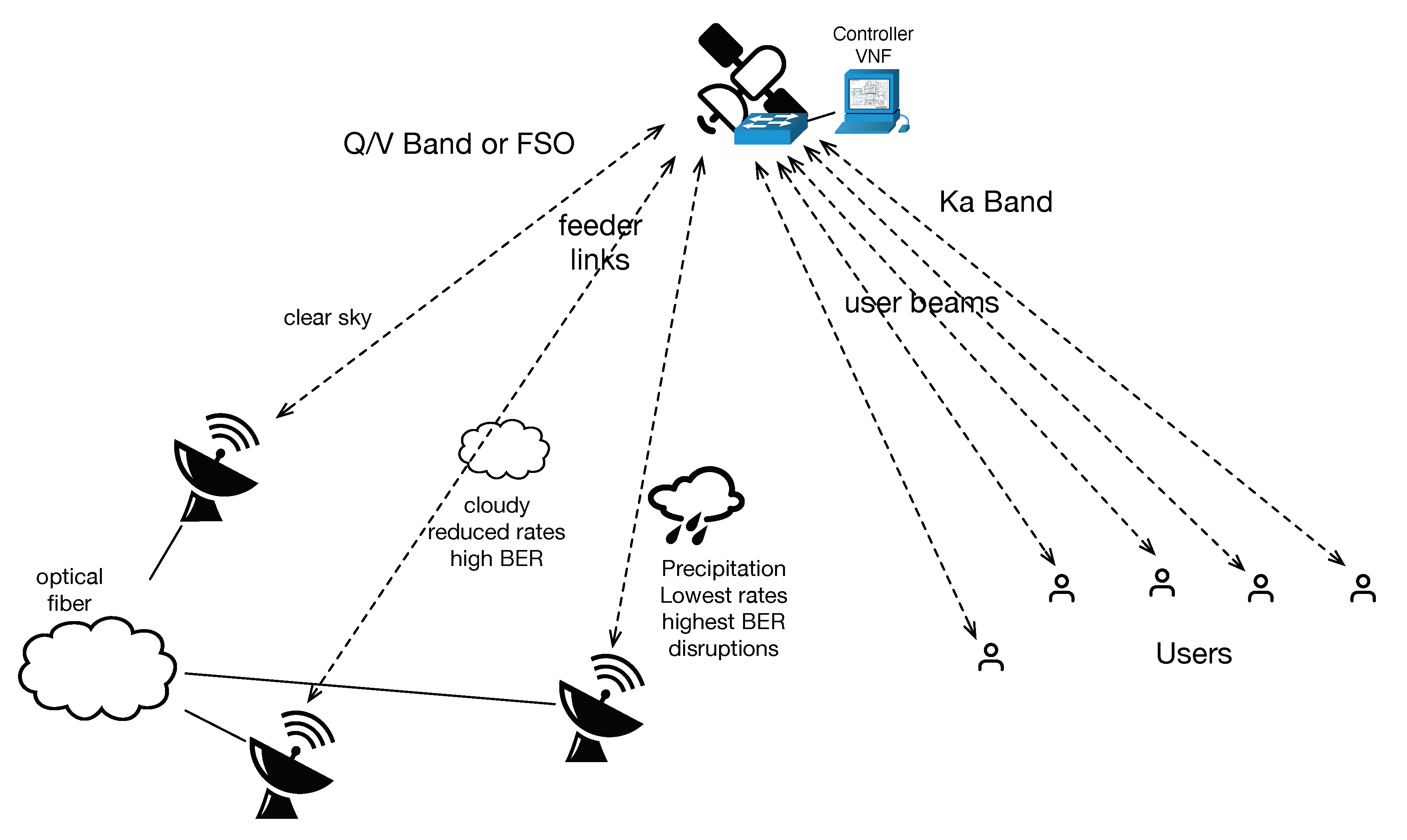
3. SDN/VNF HTS Architecture
Agent Learning Goal
- P-model: binary input (either 0 or 1),
- Q-model: finite values in the interval ,
- S-model: continuous values in the interval .
4. Feeder Selection with Reinforcement Learning
| Algorithm 1 Delay Computation |
|
| Algorithm 2 Packet-loss Computation |
|
4.1. Routing with SLA
- is the most recent average cost obtained for feeder link v at time ,
- is the minimum average cost, and
- is the maximum average cost.
| Algorithm 3 Latency and Packet-loss Optimized SLA Feeder Link Selection |
 |
4.2. Routing with Q-Learning
| Algorithm 4 Latency and Packet-loss Optimized Q-Learning Link Selection |
 |
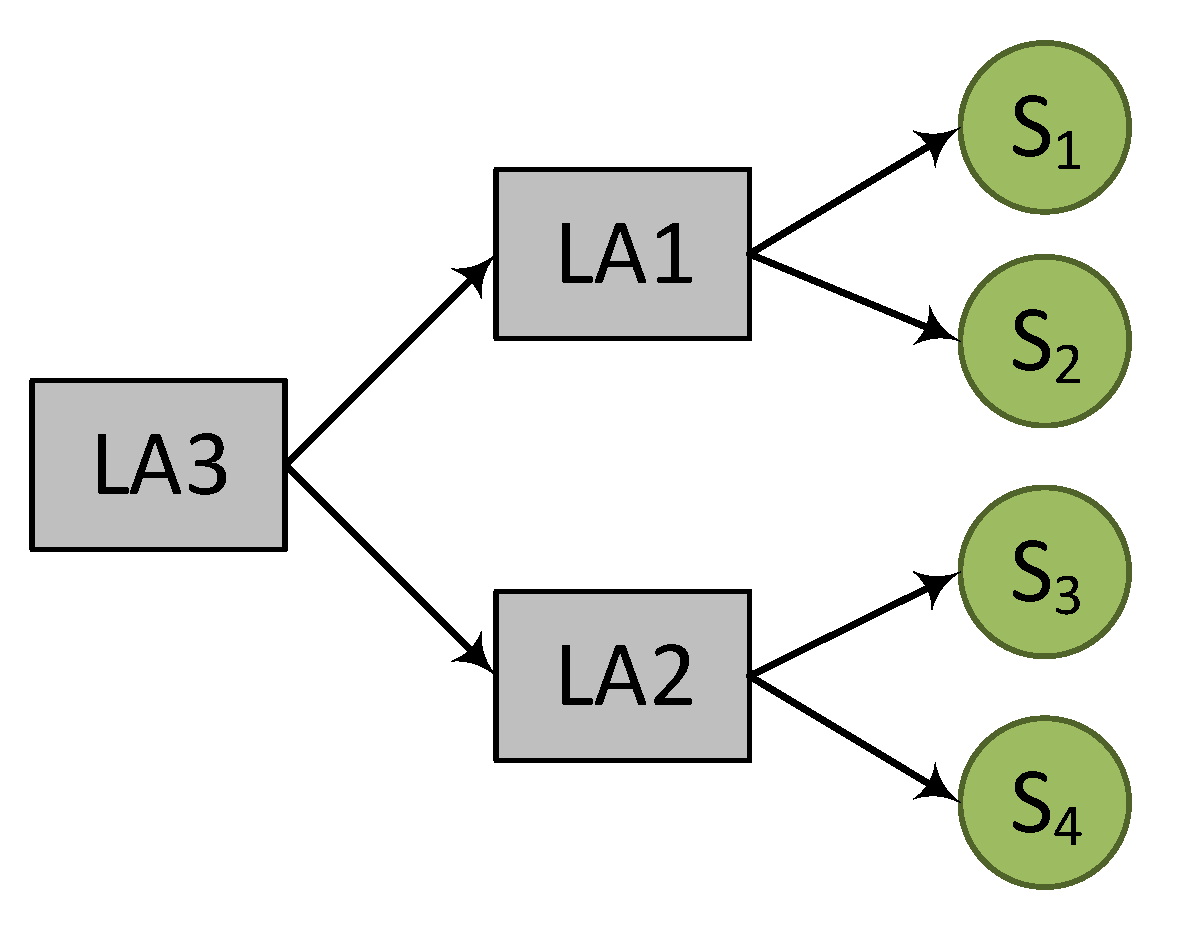
4.3. Routing Using Hierarchical SLA (HSLA)
5. Proof of Concept
5.1. Flow Rules to Optimize Response Times
5.1.1. Monitor Module
- –
- switch ID,
- –
- target IP address of a given server associated with the feeder link,
- –
- creation time stamp.
5.1.2. TCP Packet Handling
5.1.3. Dynamic Flow Modification
- Selects a server based on a policy.
- SLA—the agent selects a server based on the performance of the server from the previous flow modification interval as in Algorithm 3.
- Q-Learning—the agent selects a server that has the minimum Q-value as in Algorithm 4.
- RR—the destination server is selected in sequential order.
In the former two methods (i.e., learning methods), the forward flow rule of the switch is not modified if the selected server in an interval is the same in the previous interval . - Looks up the flow table for a match with the VIP as the destination IP address and the client IP address as the source IP address. If it finds a matching entry, it modifies the flow rule using the OFPFC_MODIFY_STRICT command with actions to set the destination IP address and destination MAC address fields to that of the selected server, and the out_port to the port, the server is connected to the switch.
- It adds a new flow rule to handle the reverse traffic from the newly selected server if there is no matching rule exists in the flow table.
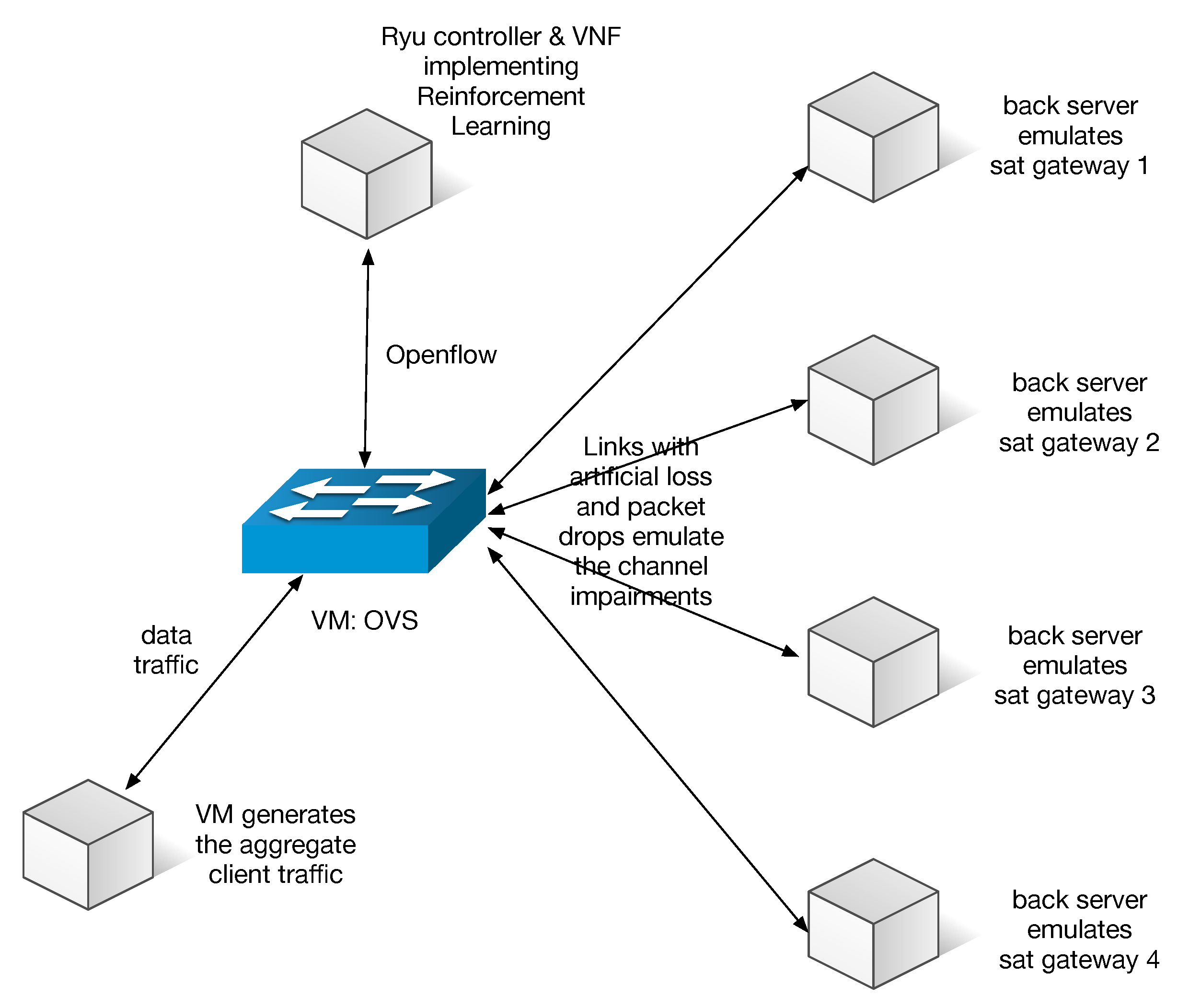
5.2. Testbed Setup
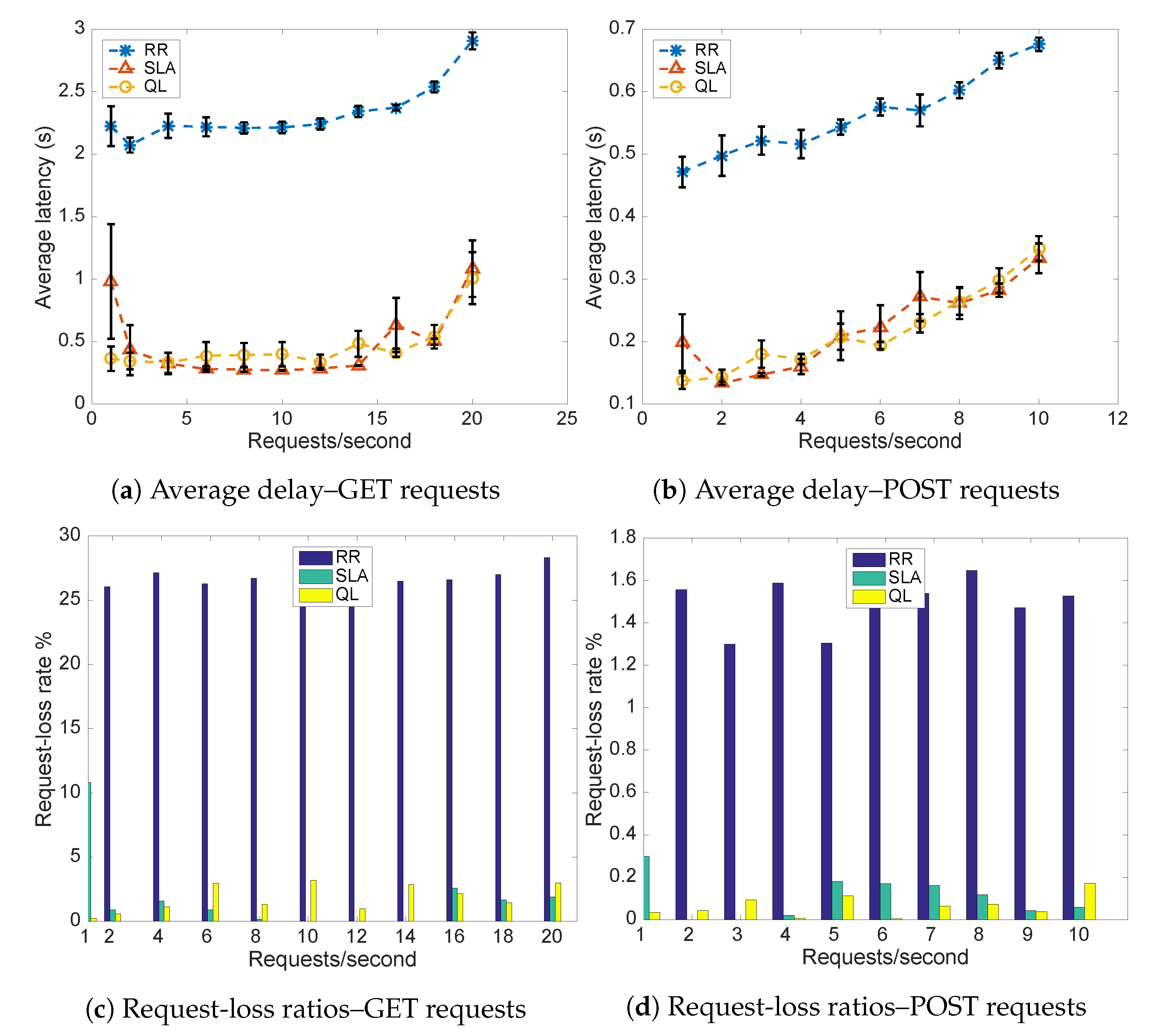
6. Results
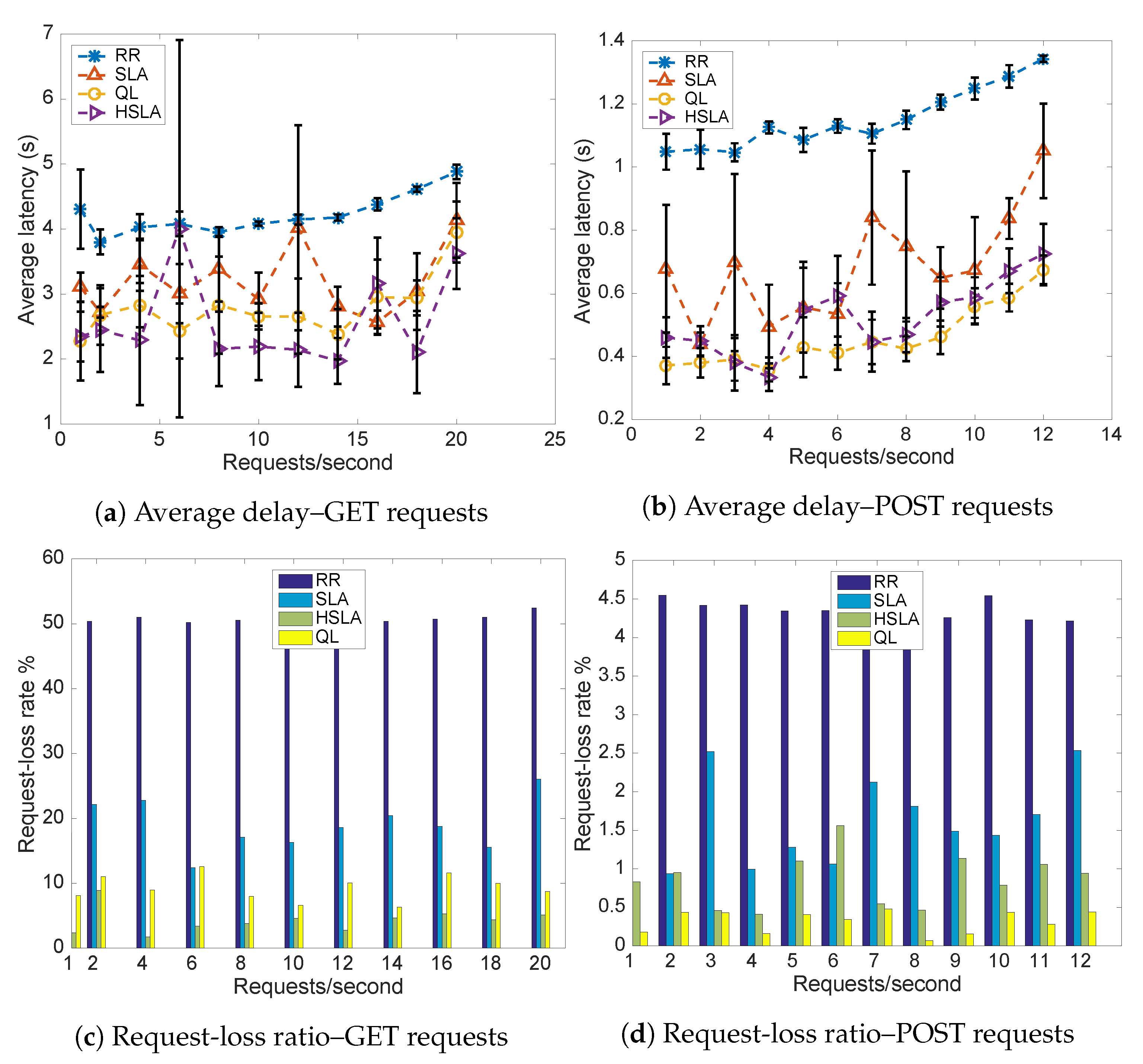
6.1. Scenario-1
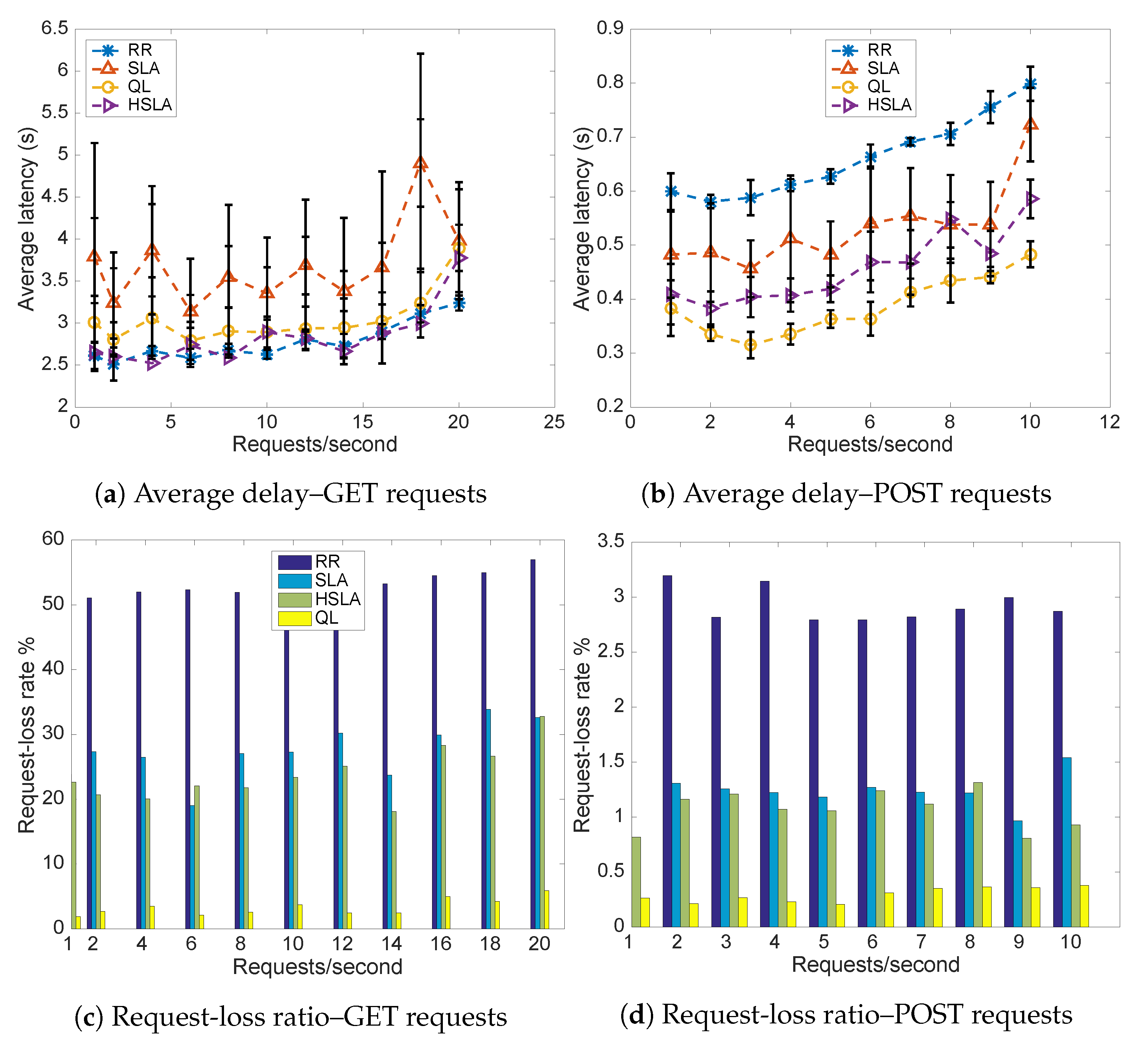
6.2. Scenario-2
6.3. Scenario-3
7. Discussion
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| SDN | Software-Defined Networking |
| VNF | Virtual Network Function |
| NFV | Network Function Virtualization |
| HTS | High Throughput System |
| EHF | Extremely High Frequency |
| ACM | Adaptive Coding Modulation |
| SLA | S-model Learning Automaton |
| RL | Reinforcement Learning |
| HSLA | Hierarchical S-model Learning Automaton |
| QL | Q-Learning algorithm |
| ICMP | Internet Control Message Protocol |
References
- Hwang, J.; Ramakrishnan, K.K.; Wood, T. NetVM: High Performance and Flexible Networking Using Virtualization on Commodity Platforms. IEEE Trans. Netw. Serv. Manag. 2015, 12, 34–47. [Google Scholar] [CrossRef]
- Malik, A.; Singh, P. Free Space Optics: Current Applications and Future Challenges. Int. J. Opt. 2015, 2015, 945483. [Google Scholar] [CrossRef] [Green Version]
- Kyrgiazos, A.; Evans, B.; Thompson, P.; Jeannin, N. Gateway diversity scheme for a future broadband satellite system. In Proceedings of the 2012 6th Advanced Satellite Multimedia Systems Conference (ASMS) and 12th Signal Processing for Space Communications Workshop (SPSC), Vigo, Spain, 5–7 September 2012; pp. 363–370. [Google Scholar]
- de Cola, T.; Ginesi, A.; Giambene, G.; Polyzos, G.C.; Siris, V.A.; Fotiou, N.; Thomas, Y. Network and Protocol Architectures for Future Satellite Systems. Found. Trends Netw. 2017, 12, 1–161. [Google Scholar] [CrossRef] [Green Version]
- Jeannin, N.; Castanet, L.; Radzik, J.; Bousquet, M.; Evans, B.; Thompson, P. Smart gateways for terabit/s satellite. Int. J. Satell. Commun. Netw. 2014, 32, 93–106. [Google Scholar] [CrossRef]
- Aurizzi, M.M.; Milana, S.; Rossi, T.; Cianca, E.; Ruggieri, M. SDN for Smart Gateway Diversity Optimization in High Throughput Satellite Systems. In Proceedings of the 2019 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019; pp. 1–5. [Google Scholar]
- Bonfim, M.S.; Dias, K.L.; Fernandes, S.F. Integrated NFV/SDN architectures: A systematic literature review. ACM Comput. Surv. (CSUR) 2019, 51, 1–39. [Google Scholar] [CrossRef]
- Ejaz, S.; Iqbal, Z.; Shah, P.A.; Bukhari, B.H.; Ali, A.; Aadil, F. Traffic load balancing using software defined networking (SDN) controller as virtualized network function. IEEE Access 2019, 7, 46646–46658. [Google Scholar] [CrossRef]
- Akhtar, N.; Matta, I.; Wang, Y. Managing NFV using SDN and control theory. In Proceedings of the NOMS 2016-2016 IEEE/IFIP Network Operations and Management Symposium, Istanbul, Turkey, 25–29 April 2016; pp. 1113–1118. [Google Scholar]
- Xu, J.; Wang, J.; Qi, Q.; Sun, H.; He, B. Deep neural networks for application awareness in SDN-based network. In Proceedings of the 2018 IEEE 28th International Workshop on Machine Learning for Signal Processing (MLSP), Aalborg, Denmark, 17–20 September 2018; pp. 1–6. [Google Scholar]
- Van Rossem, S.; Tavernier, W.; Sonkoly, B.; Colle, D.; Czentye, J.; Pickavet, M.; Demeester, P. Deploying elastic routing capability in an SDN/NFV-enabled environment. In Proceedings of the 2015 IEEE Conference on Network Function Virtualization and Software Defined Network (NFV-SDN), San Francisco, CA, USA, 18–21 November 2015; pp. 22–24. [Google Scholar]
- Bertaux, L.; Medjiah, S.; Berthou, P.; Abdellatif, S.; Hakiri, A.; Gelard, P.; Planchou, F.; Bruyere, M. Software defined networking and virtualization for broadband satellite networks. IEEE Commun. Mag. 2015, 53, 54–60. [Google Scholar] [CrossRef]
- Gardikis, G.; Costicoglou, S.; Koumaras, H.; Sakkas, C.; Kourtis, A.; Arnal, F.; Contreras, L.M.; Gutierrez, P.A.; Guta, M. NFV applicability and use cases in satellite networks. In Proceedings of the 2016 European Conference on Networks and Communications (EuCNC), Athens, Greece, 27–30 June 2016; pp. 47–51. [Google Scholar]
- Li, T.; Zhou, H.; Luo, H.; Xu, Q.; Ye, Y. Using SDN and NFV to Implement Satellite Communication Networks. In Proceedings of the 2016 International Conference on Networking and Network Applications (NaNA), Hakodate, Japan, 23–25 July 2016; pp. 131–134. [Google Scholar]
- Akyildiz, I.F.; Kak, A. The Internet of Space Things/CubeSats: A ubiquitous cyber-physical system for the connected world. Comput. Netw. 2019, 150, 134–149. [Google Scholar] [CrossRef]
- Cai, Y.; Wang, Y.; Zhong, X.; Li, W.; Qiu, X.; Guo, S. An approach to deploy service function chains in satellite networks. In Proceedings of the NOMS 2018—2018 IEEE/IFIP Network Operations and Management Symposium, Taipei, Taiwan, 23–27 April 2018; pp. 1–7. [Google Scholar]
- Narendra, K.S.; Thathachar, M.A. Learning Automata: An Introduction; Dover Publications Inc: Mineola, NY, USA, 2012. [Google Scholar]
- Saleem, A.; Afzal, M.K.; Ateeq, M.; Kim, S.W.; Zikria, Y.B. Intelligent learning automata-based objective function in RPL for IoT. Sustain. Cities Soc. 2020, 59, 102234. [Google Scholar] [CrossRef]
- Nicopolitidis, P.; Papadimitriou, G.I.; Pomportsis, A.S. Using learning automata for adaptive push-based data broadcasting in asymmetric wireless environments. IEEE Trans. Veh. Technol. 2002, 51, 1652–1660. [Google Scholar] [CrossRef]
- Tanwar, S.; Tyagi, S.; Kumar, N.; Obaidat, M.S. LA-MHR: Learning automata based multilevel heterogeneous routing for opportunistic shared spectrum access to enhance lifetime of WSN. IEEE Syst. J. 2018, 13, 313–323. [Google Scholar] [CrossRef]
- Watkins, C.J.; Dayan, P. Q-learning. Mach. Learn. 1992, 8, 279–292. [Google Scholar] [CrossRef]
- Dudukovich, R.; Hylton, A.; Papachristou, C. A machine learning concept for DTN routing. In Proceedings of the 2017 IEEE International Conference on Wireless for Space and Extreme Environments (WiSEE), Montreal, QC, Canada, 10–12 October 2017; pp. 110–115. [Google Scholar]
- Boyan, J.A.; Littman, M.L. Packet routing in dynamically changing networks: A reinforcement learning approach. In Advances in Neural Information Processing Systems; Morgan Kaufmann: Burlington, MA, USA, 1993; pp. 671–678. [Google Scholar]
- Gelenbe, E.; Gellman, M.; Lent, R.; Liu, P.; Su, P. Autonomous smart routing for network QoS. In Proceedings of the First International Conference on Autonomic Computing, New York, NY, USA, 17–19 May 2004; pp. 232–239. [Google Scholar]
- Duplyakin, D.; Ricci, R.; Maricq, A.; Wong, G.; Duerig, J.; Eide, E.; Stoller, L.; Hibler, M.; Johnson, D.; Webb, K.; et al. The Design and Operation of CloudLab. In Proceedings of the Proceedings of the USENIX Annual Technical Conference (ATC), Renton, WA, USA, 10–12 July 2019; pp. 1–14. [Google Scholar]
- Nippon Telegraph and Telephone Corporation. Ryu: Component-Based Software Defined Networking Framework. Available online: https://ryu-sdn.org (accessed on 1 November 2020).
- He, K.; Khalid, J.; Gember-Jacobson, A.; Das, S.; Prakash, C.; Akella, A.; Li, L.E.; Thottan, M. Measuring control plane latency in SDN-enabled switches. In Proceedings of the 1st ACM SIGCOMM Symposium on Software Defined Networking Research, Santa Clara, CA, USA, 17–18 June 2015; pp. 1–6. [Google Scholar]
- Rotsos, C.; Sarrar, N.; Uhlig, S.; Sherwood, R.; Moore, A.W. OFLOPS: An open framework for OpenFlow switch evaluation. In Proceedings of the International Conference on Passive and Active Network Measurement, Vienna, Austria, 12–14 March 2012; Springer: Berlin/Heidelberg, Germany, 2012; pp. 85–95. [Google Scholar]
- Kuźniar, M.; Perešíni, P.; Kostić, D.; Canini, M. Methodology, measurement and analysis of flow table update characteristics in hardware openflow switches. Comput. Netw. 2018, 136, 22–36. [Google Scholar] [CrossRef]
- Oh, B.H.; Vural, S.; Wang, N.; Tafazolli, R. Priority-based flow control for dynamic and reliable flow management in SDN. IEEE Trans. Netw. Serv. Manag. 2018, 15, 1720–1732. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Entities | Description |
|---|---|
| Automaton | |
| Input | |
| Internal state- | |
| Output- | |
| state probability vector at each instant t | |
| Output function | |
| algorithm | computes from |
| s1 | s2 | s3 | s4 |
|---|---|---|---|
| 2 | 20 | 1 | 40 |
| Algorithm | s1 | s2 | s3 | s4 |
|---|---|---|---|---|
| RR | 440 | 440 | 439 | 439 |
| QL | 266 | 22 | 1143 | 22 |
| SLA | 157 | 31 | 1147 | 22 |
| Algorithm | s1 | s2 | s3 | s4 |
|---|---|---|---|---|
| RR | 325 | 325 | 325 | 324 |
| QL | 384 | 14 | 881 | 15 |
| SLA | 144 | 38 | 1093 | 21 |
| Packet-Loss % | s1 | s2 | s3 | s4 |
|---|---|---|---|---|
| First 5 min | 20 | 40 | 1 | 40 |
| second 5 min | 1 | 50 | 20 | 50 |
| Algorithm | s1 | s2 | s3 | s4 |
|---|---|---|---|---|
| RR | 515 | 515 | 515 | 514 |
| QL | 518 | 16 | 841 | 18 |
| SLA | 598 | 171 | 666 | 176 |
| HSLA | 581 | 49 | 757 | 59 |
| Algorithm | s1 | s2 | s3 | s4 |
|---|---|---|---|---|
| RR | 416 | 415 | 413 | 413 |
| QL | 776 | 24 | 727 | 24 |
| SLA | 526 | 159 | 749 | 148 |
| HSLA | 687 | 68 | 727 | 68 |
| Packet-Loss % | s1 | s2 | s3 | s4 |
|---|---|---|---|---|
| First 2 min | 20 | 30 | 1 | 30 |
| second 2 min | 1 | 40 | 20 | 40 |
| Algorithm | s1 | s2 | s3 | s4 |
|---|---|---|---|---|
| RR | 898 | 895 | 895 | 894 |
| QL | 1668 | 26 | 1021 | 34 |
| SLA | 1185 | 412 | 1119 | 435 |
| HSLA | 994 | 326 | 1412 | 346 |
| Algorithm | s1 | s2 | s3 | s4 |
|---|---|---|---|---|
| RR | 654 | 654 | 654 | 654 |
| QL | 1330 | 40 | 1175 | 44 |
| SLA | 971 | 338 | 944 | 366 |
| HSLA | 1014 | 221 | 1189 | 195 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Velusamy, G.; Lent, R. Smart Site Diversity for a High Throughput Satellite System with Software-Defined Networking and a Virtual Network Function. Future Internet 2020, 12, 225. https://doi.org/10.3390/fi12120225
Velusamy G, Lent R. Smart Site Diversity for a High Throughput Satellite System with Software-Defined Networking and a Virtual Network Function. Future Internet. 2020; 12(12):225. https://doi.org/10.3390/fi12120225
Chicago/Turabian StyleVelusamy, Gandhimathi, and Ricardo Lent. 2020. "Smart Site Diversity for a High Throughput Satellite System with Software-Defined Networking and a Virtual Network Function" Future Internet 12, no. 12: 225. https://doi.org/10.3390/fi12120225
APA StyleVelusamy, G., & Lent, R. (2020). Smart Site Diversity for a High Throughput Satellite System with Software-Defined Networking and a Virtual Network Function. Future Internet, 12(12), 225. https://doi.org/10.3390/fi12120225