An Extended Car-Following Model Considering Generalized Preceding Vehicles in V2X Environment


 ,
,
Abstract
1. Introduction
2. Model
3. Parameter Calibration
- (a)
- population size: 60;
- (b)
- crossover probability: 0.9;
- (c)
- mutation probability: 0.2;
- (d)
- iteration number: 500;
- (e)
- value range of parameters to be celebrated: , , .
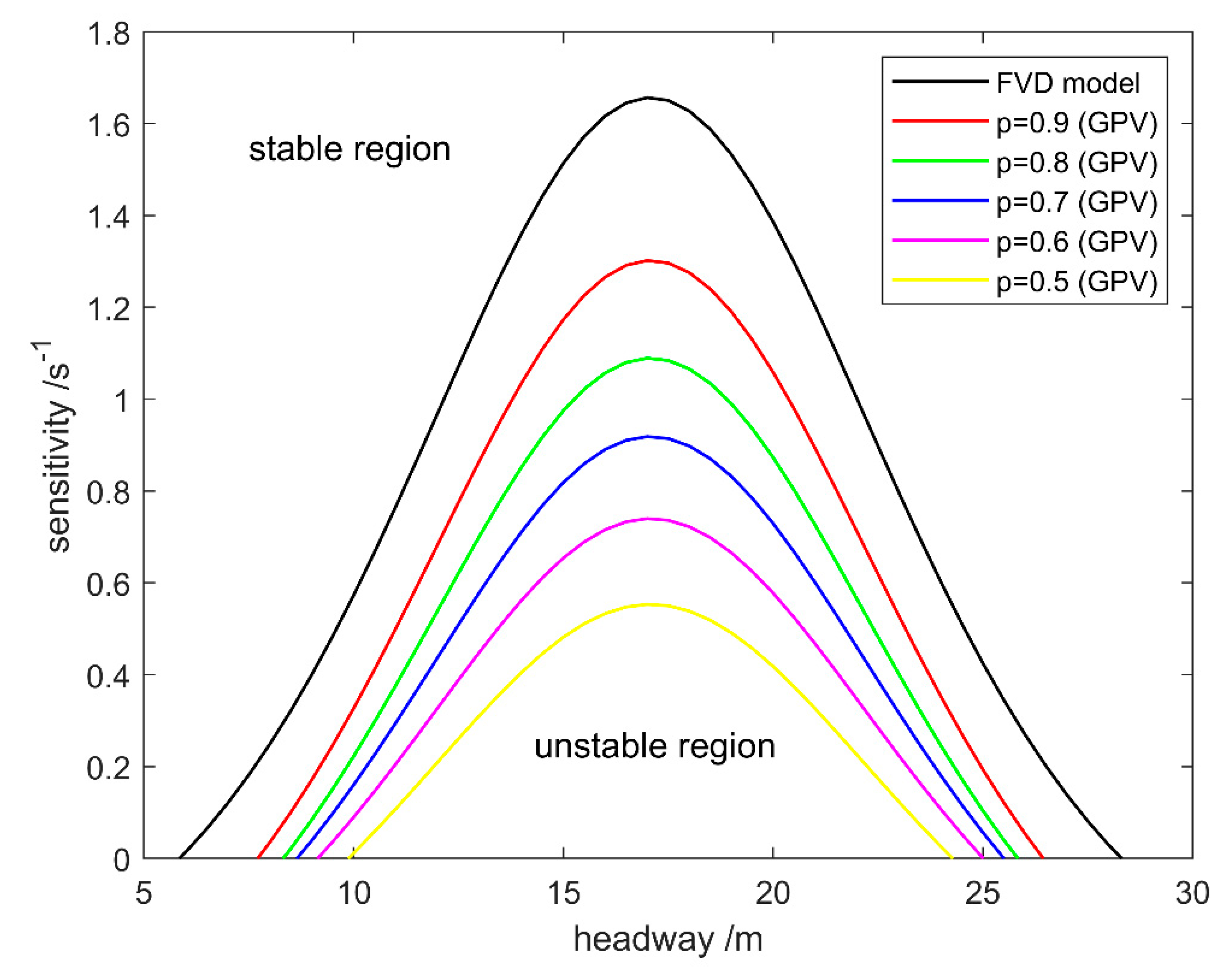
4. Stability Analysis
5. Numerical Simulation
5.1. Simulation of Starting Process
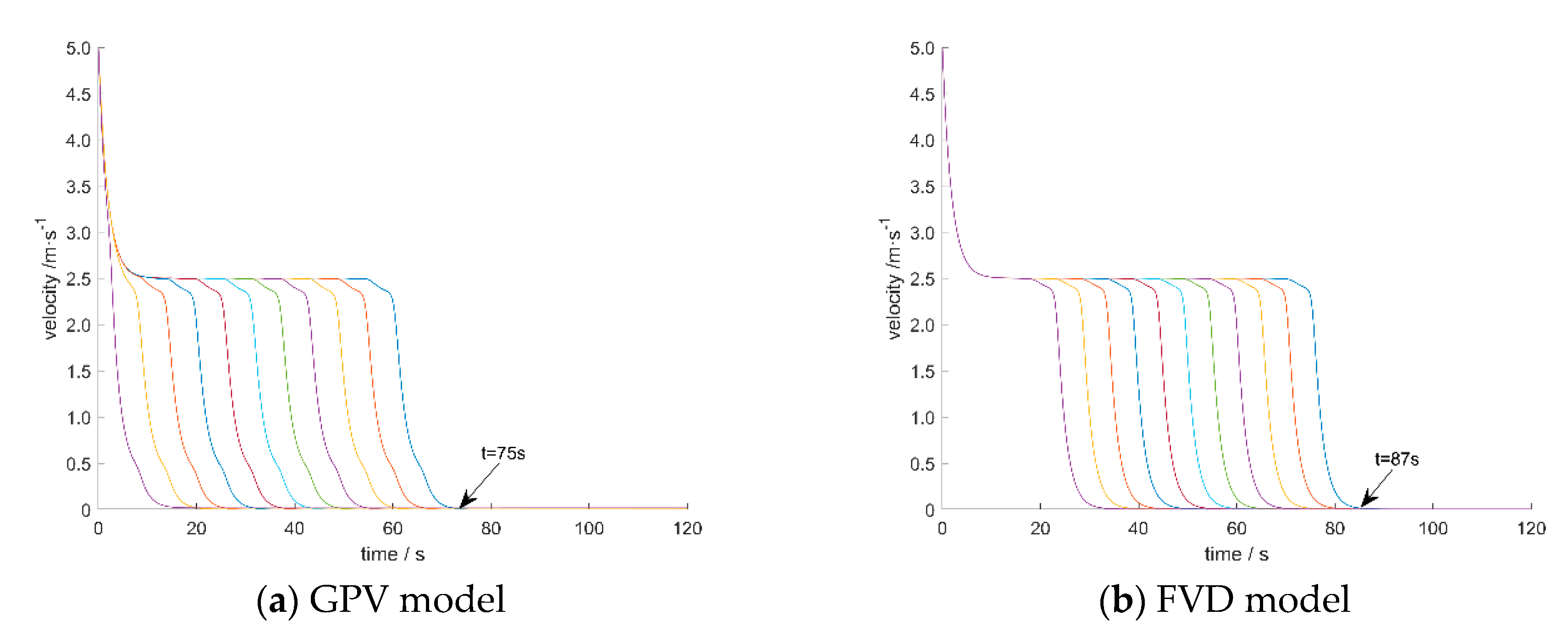
5.2. Simulation of Braking Process
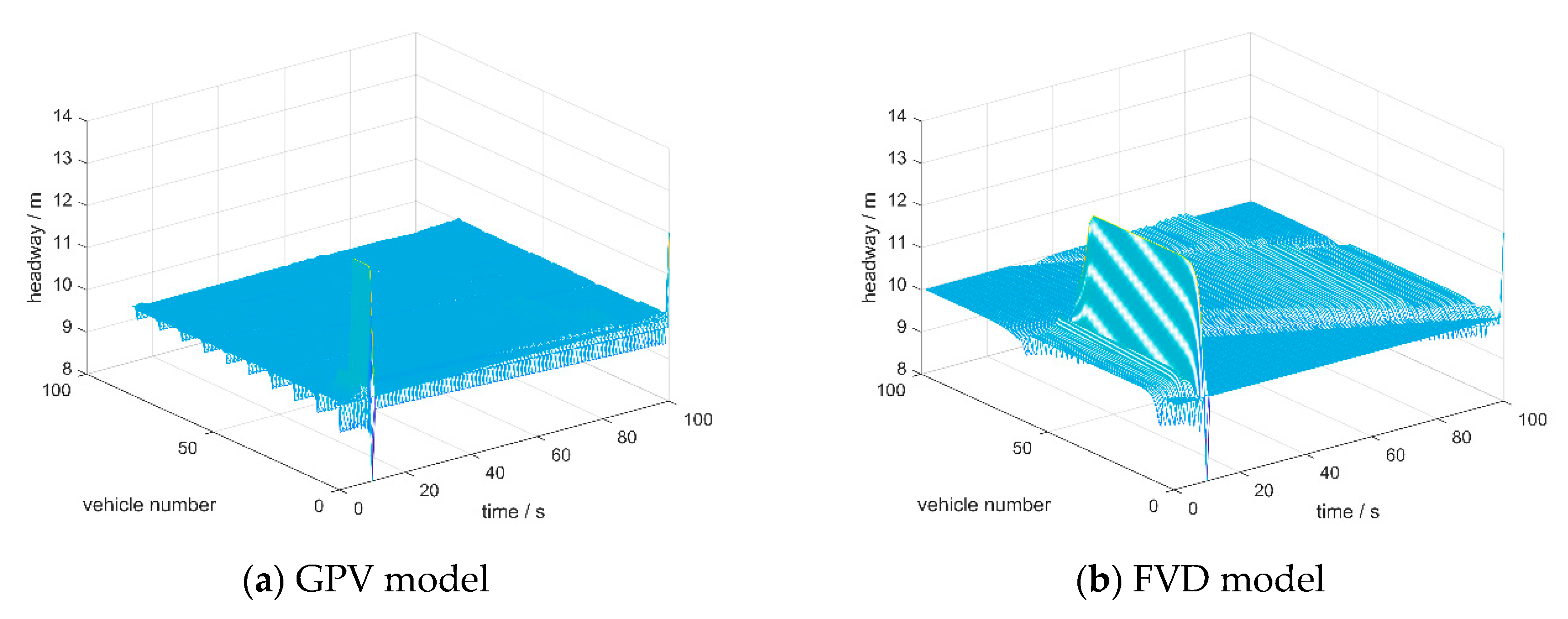
5.3. Simulation of Disturbance Propagation Process
6. Discussion
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Seo, H.; Lee, K.-D.; Yasukawa, S.; Peng, Y.; Sartori, P. LTE evolution for vehicle-to-everything services. IEEE Commun. Mag. 2016, 54, 22–28. [Google Scholar] [CrossRef]
- Storck, C.R.; Duarte-Figueiredo, F. A 5G V2X Ecosystem Providing Internet of Vehicles. Sensors 2019, 19, 550. [Google Scholar] [CrossRef] [PubMed]
- Farah, H.; Koutsopoulos, H.N. Do cooperative systems make drivers’ car-following behavior safer? Transp. Res. Part C Emerg. Technol. 2014, 41, 61–72. [Google Scholar] [CrossRef]
- Li, X.; Cui, J.; An, S.; Parsafard, M. Stop-and-go traffic analysis: Theoretical properties, environmental impacts and oscillation mitigation. Transp. Res. Part B Methodol. 2014, 70, 319–339. [Google Scholar] [CrossRef]
- Jia, D.; Ngoduy, D. Enhanced cooperative car-following traffic model with the combination of V2V and V2I communication. Transp. Res. Part B Methodol. 2016, 90, 172–191. [Google Scholar] [CrossRef]
- Nagatani, T. Stabilization and enhancement of traffic flow by the next-nearest-neighbor interaction. Phys. Rev. E 1999, 60, 6395–6401. [Google Scholar] [CrossRef]
- Lenz, H.; Wagner, C.; Sollacher, R. Multi-anticipative car-following model. Eur. Phys. J. B 1999, 7, 331–335. [Google Scholar] [CrossRef]
- Ge, H.X.; Shiqiang, D.; Dong, L.Y.; Xue, Y. Stabilization effect of traffic flow in an extended car-following model based on an intelligent transportation system application. Phys. Rev. E 2004, 70, 066134. [Google Scholar] [CrossRef]
- Chen, J.; Liu, R.; Ngoduy, D.; Shi, Z. A new multi-anticipative car-following model with consideration of the desired following distance. Nonlinear Dyn. 2016, 85, 2705–2717. [Google Scholar] [CrossRef]
- Li, Z.-P.; Liu, Y.-C. Analysis of stability and density waves of traffic flow model in an ITS environment. Eur. Phys. J. B 2006, 53, 367–374. [Google Scholar] [CrossRef]
- Hu, Y.; Ma, T.; Chen, J. An extended multi-anticipative delay model of traffic flow. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 3128–3135. [Google Scholar] [CrossRef]
- Guo, L.; Zhao, X.; Yu, S.; Li, X.; Shi, Z. An improved car-following model with multiple preceding cars’ velocity fluctuation feedback. Phys. A Stat. Mech. Appl. 2017, 471, 436–444. [Google Scholar] [CrossRef]
- Peng, G.; Sun, D. A dynamical model of car-following with the consideration of the multiple information of preceding cars. Phys. Lett. A 2010, 374, 1694–1698. [Google Scholar] [CrossRef]
- Li, Y.; Sun, D.; Liu, W.; Zhang, M.; Zhao, M.; Liao, X.; Tang, L. Erratum to: Modeling and simulation for microscopic traffic flow based on multiple headway, velocity and acceleration difference. Nonlinear Dyn. 2011, 66, 845. [Google Scholar] [CrossRef][Green Version]
- Sun, D.; Kang, Y.; Yang, S. A novel car following model considering average speed of preceding vehicles group. Phys. A Stat. Mech. Appl. 2015, 436, 103–109. [Google Scholar] [CrossRef]
- Kuang, H.; Xu, Z.-P.; Li, X.-L.; Lo, S. An extended car-following model accounting for the average headway effect in intelligent transportation system. Phys. A Stat. Mech. Appl. 2017, 471, 778–787. [Google Scholar] [CrossRef]
- Guo, Y.; Xue, Y.; Shi, Y.; Wei, F.-P.; Lü, L.-Z.; He, H.-D. Mean-field velocity difference model considering the average effect of multi-vehicle interaction. Commun. Nonlinear Sci. Numer. Simul. 2018, 59, 553–564. [Google Scholar] [CrossRef]
- Wen-Xing, Z.; Li-Dong, Z. A new car-following model for autonomous vehicles flow with mean expected velocity field. Phys. A Stat. Mech. Appl. 2018, 492, 2154–2165. [Google Scholar] [CrossRef]
- Kuang, H.; Wang, M.-T.; Lu, F.-H.; Bai, K.-Z.; Li, X.-L. An extended car-following model considering multi-anticipative average velocity effect under V2V environment. Phys. A Stat. Mech. Appl. 2019, 527, 121268. [Google Scholar] [CrossRef]
- Xiao, X.; Duan, H.; Wen, J. A novel car-following inertia gray model and its application in forecasting short-term traffic flow. Appl. Math. Model. 2020, 87, 546–570. [Google Scholar] [CrossRef]
- Jin, Y.; Meng, J. Dynamical analysis of an optimal velocity model with time-delayed feedback control. Commun. Nonlinear Sci. Numer. Simul. 2020, 90, 105333. [Google Scholar] [CrossRef]
- Jian, M.; Shi, J. Analysis of impact of elderly drivers on traffic safety using ANN based car-following model. Saf. Sci. 2020, 122, 104536. [Google Scholar] [CrossRef]
- Jiao, S.; Zhang, S.; Zhou, B.; Zhang, L.; Xue, L. Dynamic performance and safety analysis of car-following models considering collision sensitivity. Phys. A Stat. Mech. Appl. 2020, 564, 125504. [Google Scholar] [CrossRef]
- Cao, B.-G. A car-following dynamic model with headway memory and evolution trend. Phys. A Stat. Mech. Appl. 2020, 539, 122903. [Google Scholar] [CrossRef]
- Zhai, C.; Wu, W. A new continuum model with driver’s continuous sensory memory and preceding vehicle’s taillight. Commun. Theor. Phys. 2020, 72, 105004. [Google Scholar] [CrossRef]
- Ma, G.; Ma, M.; Liang, S.; Wang, Y.; Guo, H. Nonlinear analysis of the car-following model considering headway changes with memory and backward looking effect. Phys. A Stat. Mech. Appl. 2021, 562, 125303. [Google Scholar] [CrossRef]
- Mai, M.; Wang, L.; Prokop, G. Advancement of the car following model of Wiedemann on lower velocity ranges for urban traffic simulation. Transp. Res. Part F Traffic Psychol. Behav. 2019, 61, 30–37. [Google Scholar] [CrossRef]
- Zhang, G.; Yin, L.; Pan, D.-B.; Zhang, Y.; Cui, B.-Y.; Jiang, S. Research on multiple vehicles’ continuous self-delayed velocities on traffic flow with vehicle-to-vehicle communication. Phys. A Stat. Mech. Appl. 2020, 541, 123704. [Google Scholar] [CrossRef]
- Ma, L.; Qu, S. A sequence to sequence learning based car-following model for multi-step predictions considering reaction delay. Transp. Res. Part C Emerg. Technol. 2020, 120, 102785. [Google Scholar] [CrossRef]
- Wang, P.; Di, B.; Zhang, H.; Bian, K.; Song, L. Platoon Cooperation in Cellular V2X Networks for 5G and Beyond. IEEE Trans. Wirel. Commun. 2019, 18, 3919–3932. [Google Scholar] [CrossRef]
- Li, Y.; Chen, W.; Peeta, S.; Wang, Y. Platoon Control of Connected Multi-Vehicle Systems under V2X Communications: Design and Experiments. IEEE Trans. Intell. Transp. Syst. 2020, 21, 1891–1902. [Google Scholar] [CrossRef]
- Sequeira, L.; Szefer, A.; Slome, J.; Mahmoodi, T. A Lane Merge Coordination Model for a V2X Scenario. In Proceedings of the 2019 European Conference on Networks and Communications (EuCNC); Institute of Electrical and Electronics Engineers (IEEE), Valencia, Spain, 18–21 June 2019; pp. 198–203. [Google Scholar]
- Jia, B.; Yang, D.; Zhang, X.; Wu, Y.; Guo, Q. Car-following model considering the lane-changing prevention effect and its stability analysis. Eur. Phys. J. B 2020, 93, 1–9. [Google Scholar] [CrossRef]
- Bando, M.; Hasebe, K.; Nakayama, A.; Shibata, A.; Sugiyama, Y. Dynamical model of traffic congestion and numerical simulation. Phys. Rev. E 1995, 51, 1035–1042. [Google Scholar] [CrossRef] [PubMed]
- Helbing, D.; Tilch, B. Generalized force model of traffic dynamics. Phys. Rev. E 1998, 58, 133–138. [Google Scholar] [CrossRef]
- Jiang, R.; Wu, Q.; Zhu, Z. Full velocity difference model for a car-following theory. Phys. Rev. E 2001, 64, 017101. [Google Scholar] [CrossRef]
- Treiber, M.; Helbing, D. Memory effects in microscopic traffic models and wide scattering in flow-density data. Phys. Rev. E 2003, 68, 046119. [Google Scholar] [CrossRef]
- Peng, Y.; Liu, S.; Yu, D.Z. An improved car-following model with consideration of multiple preceding and following vehicles in a driver’s view. Phys. A Stat. Mech. Appl. 2020, 538, 122967. [Google Scholar] [CrossRef]
- Yang, X.; Zhang, N. An Improved Method of Determining Car-Following State. J. Transp. Syst. Eng. Inf. Technol. 2006, 14–17. [Google Scholar] [CrossRef]
- Sangster, J.; Rakha, H.; Du, J. Application of Naturalistic Driving Data to Modeling of Driver Car-Following Behavior. Transp. Res. Rec. J. Transp. Res. Board 2013, 2390, 20–33. [Google Scholar] [CrossRef]
- Zhu, M.; Wang, X.; Tarko, A.; Fang, S. Modeling car-following behavior on urban expressways in Shanghai: A naturalistic driving study. Transp. Res. Part C Emerg. Technol. 2018, 93, 425–445. [Google Scholar] [CrossRef]
- Yu, L.; Shi, Z.; Zhou, B. Kink–antikink density wave of an extended car-following model in a cooperative driving system. Commun. Nonlinear Sci. Numer. Simul. 2008, 13, 2167–2176. [Google Scholar] [CrossRef]
- Yao, Z.; Xu, T.; Jiang, Y.; Hu, R. Linear stability analysis of heterogeneous traffic flow considering degradations of connected automated vehicles and reaction time. Phys. A Stat. Mech. Appl. 2021, 561, 125218. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | |||||
|---|---|---|---|---|---|
| 6.75 | 7.91 | 0.13 | 1.57 | 5 |
| Parameters | GPV Model | FVD Model |
|---|---|---|
| 0.767 | 0.852 | |
| 0.301 | 0.389 | |
| 0.769 | — |
| Performance Index | GPV Model | FVD Model |
|---|---|---|
| MAE | 1.4746 | 2.495 |
| MARE | 0.1712 | 3.2896 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, J.; Zhang, J.; Wang, X.; Liu, Y.; Wang, Q.; Zhong, F. An Extended Car-Following Model Considering Generalized Preceding Vehicles in V2X Environment. Future Internet 2020, 12, 216. https://doi.org/10.3390/fi12120216
Han J, Zhang J, Wang X, Liu Y, Wang Q, Zhong F. An Extended Car-Following Model Considering Generalized Preceding Vehicles in V2X Environment. Future Internet. 2020; 12(12):216. https://doi.org/10.3390/fi12120216
Chicago/Turabian StyleHan, Junyan, Jinglei Zhang, Xiaoyuan Wang, Yaqi Liu, Quanzheng Wang, and Fusheng Zhong. 2020. "An Extended Car-Following Model Considering Generalized Preceding Vehicles in V2X Environment" Future Internet 12, no. 12: 216. https://doi.org/10.3390/fi12120216
APA StyleHan, J., Zhang, J., Wang, X., Liu, Y., Wang, Q., & Zhong, F. (2020). An Extended Car-Following Model Considering Generalized Preceding Vehicles in V2X Environment. Future Internet, 12(12), 216. https://doi.org/10.3390/fi12120216