Queue Spillover Management in a Connected Vehicle Environment


Abstract
1. Introduction
2. Method Principle
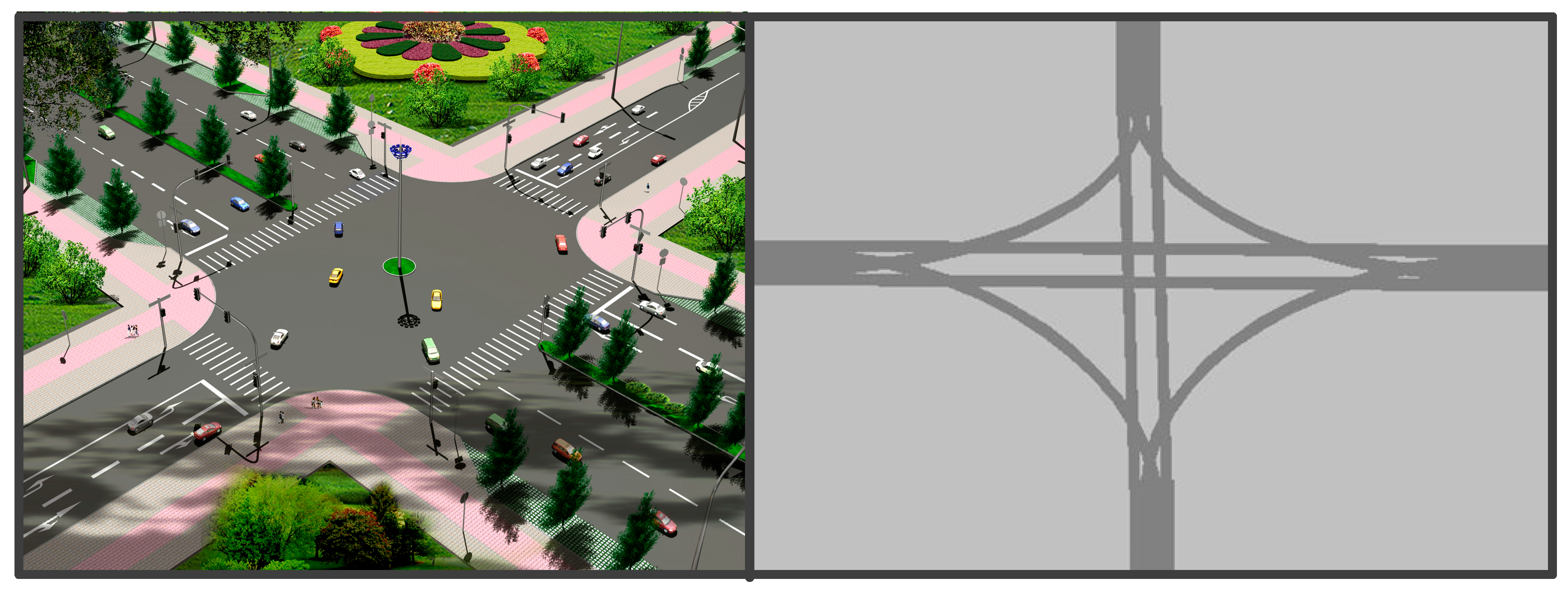
3. Intersection Signal Control Modeling
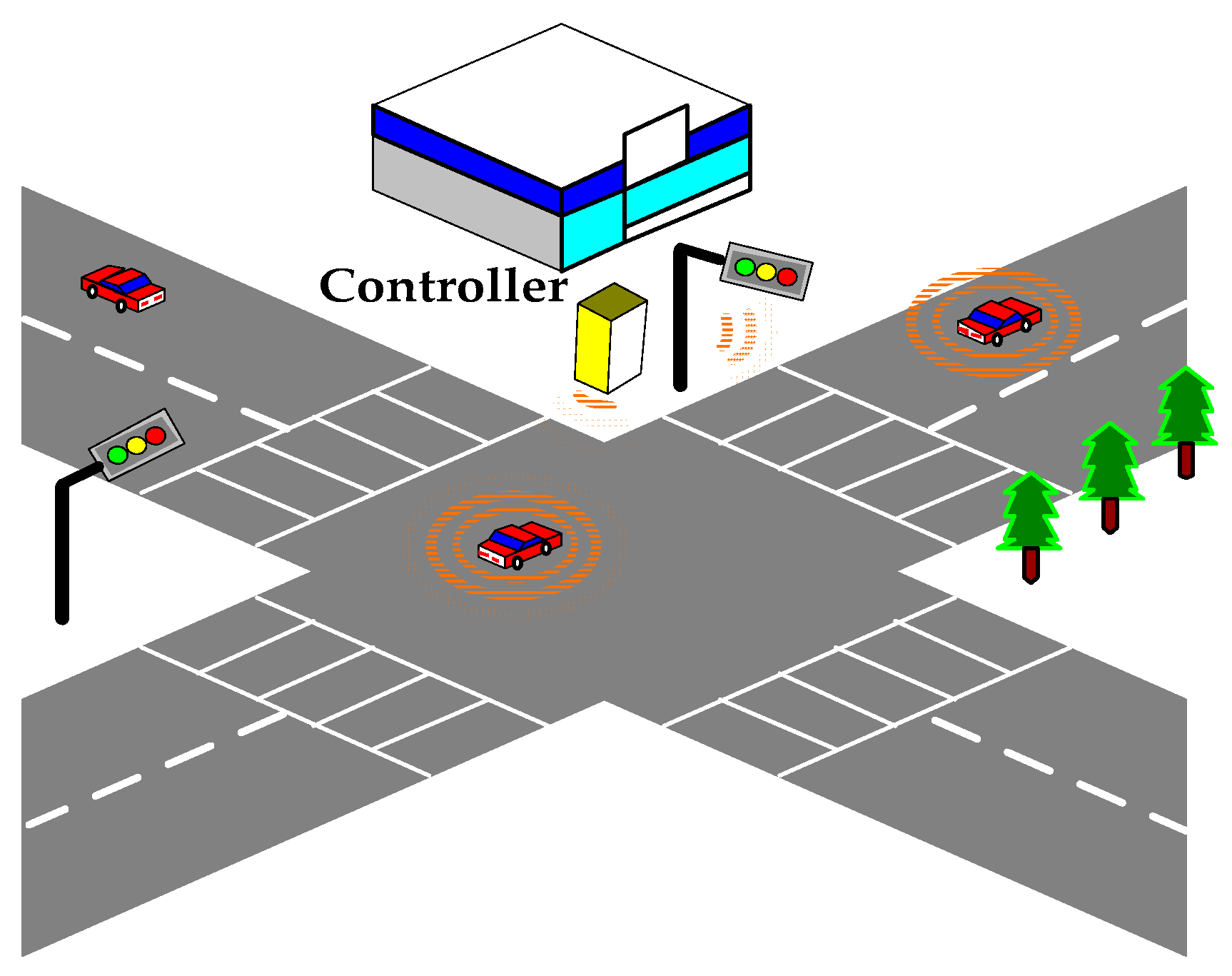
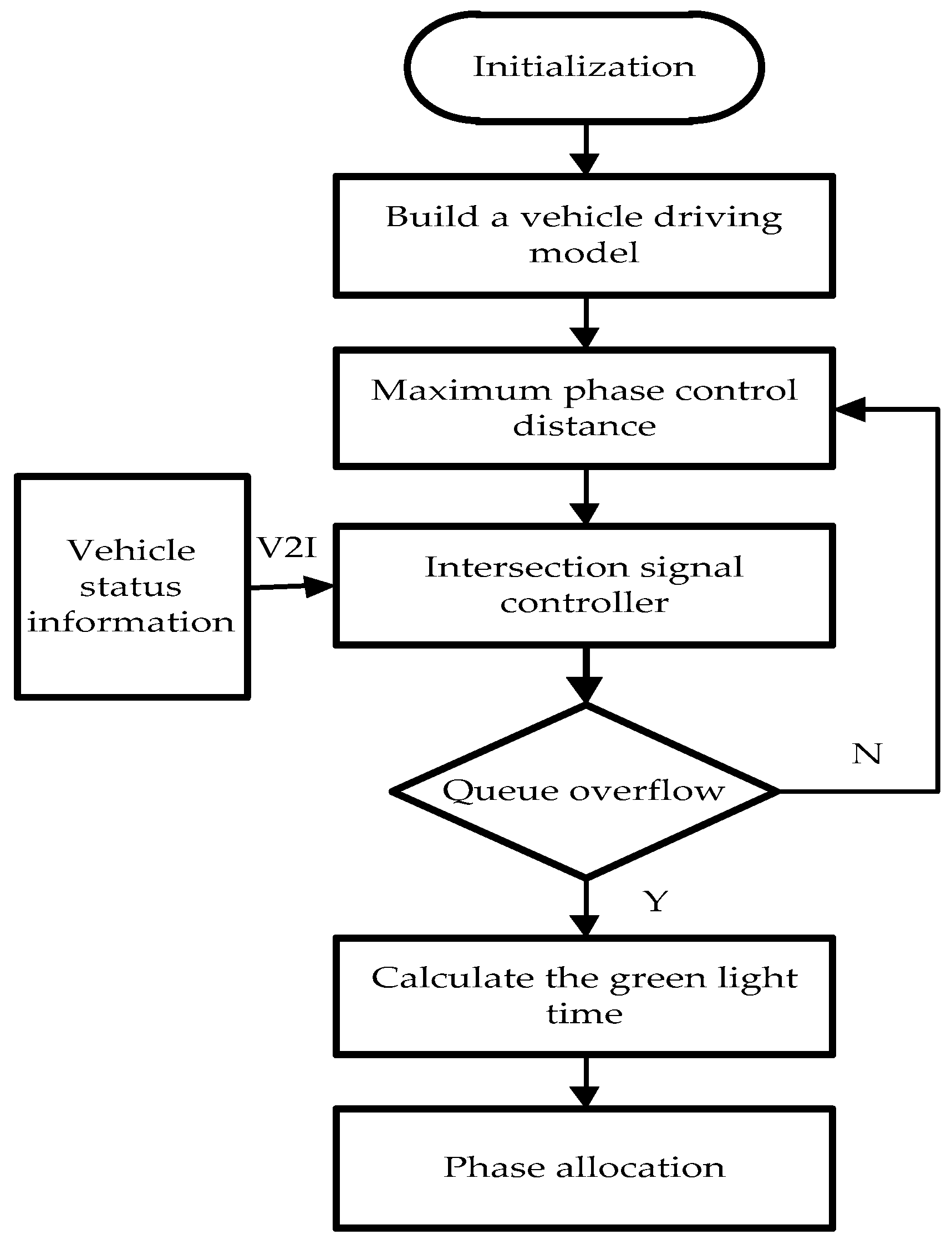
- The vehicle controller can provide spatial position and speed information to the intersection signal controller;
- Signal controllers of adjacent intersections can interact with each other;
- Keeping the same safety distance between the vehicles in line.
3.1. Phase Maximum Control Distance
3.2. Intersection Queue Overflow Judgment
- Step 1:
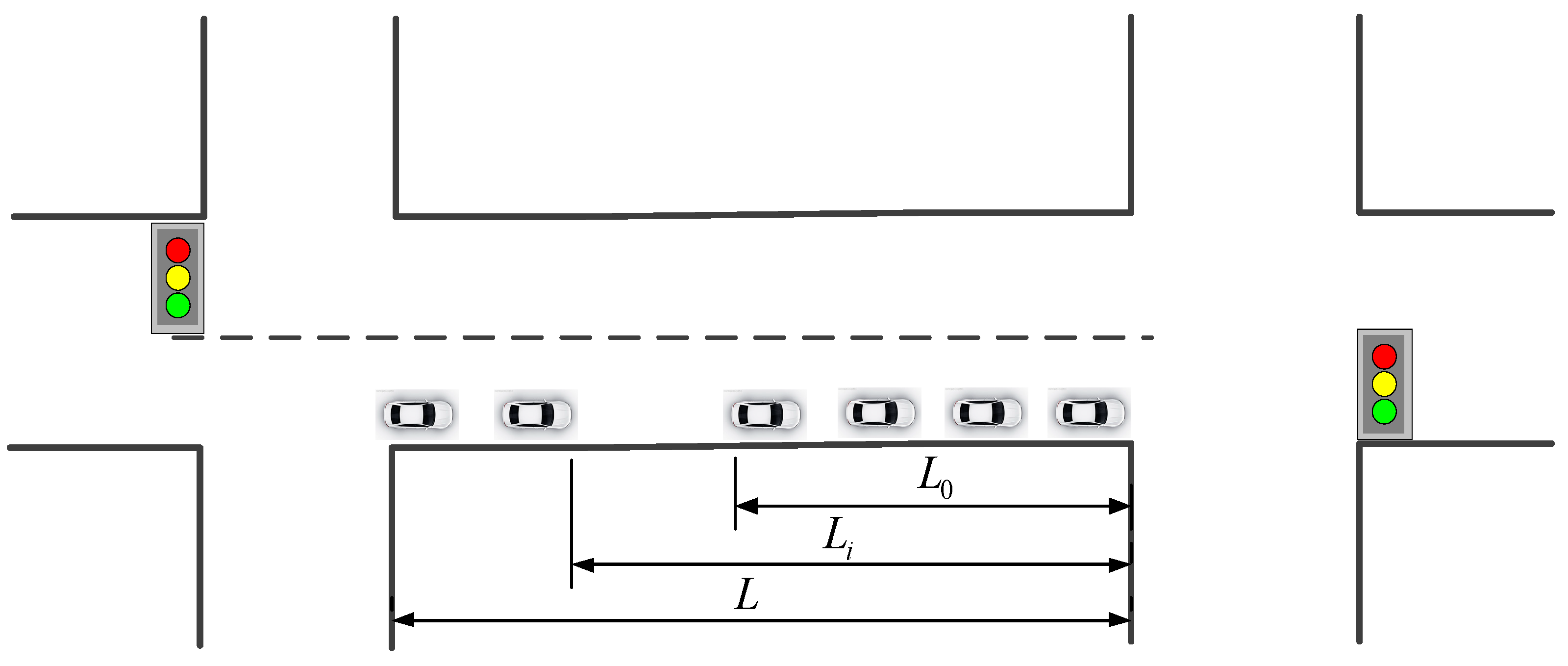
- The maximum control distance of intersection phase is assumed as . The measured vehicle queue length of each cycle was , , , ….. The queue length of the vehicle can be calculated by the position coordinates of the vehicle at the end of the queue; then get the vehicle queue length and maximum control distance differential record, as shown in Table 1.
- Step 2:
- In order to prevent the overflow of road queues, we need to find an optimal overflow control threshold value, which needs to be obtained according to the actual traffic conditions of the intersection roads. If 70% of the road length is the control limit , when the differential is reached , we need to take control measures.
- Step 3:
- When the control threshold of the intersection overflow is obtained, the overflow of the intersection can be judged according to the detection of the queue length. To eliminate the contingency of queuing, it is necessary to wait for at least one cycle, when the vehicle is detected at the overflow control limit. Then check whether the vehicle queuing trend continues to rise, if it continues, the judgment will be determined to overflow. Then the controller optimizes current phase and continues to detect the difference until it approaches zero.
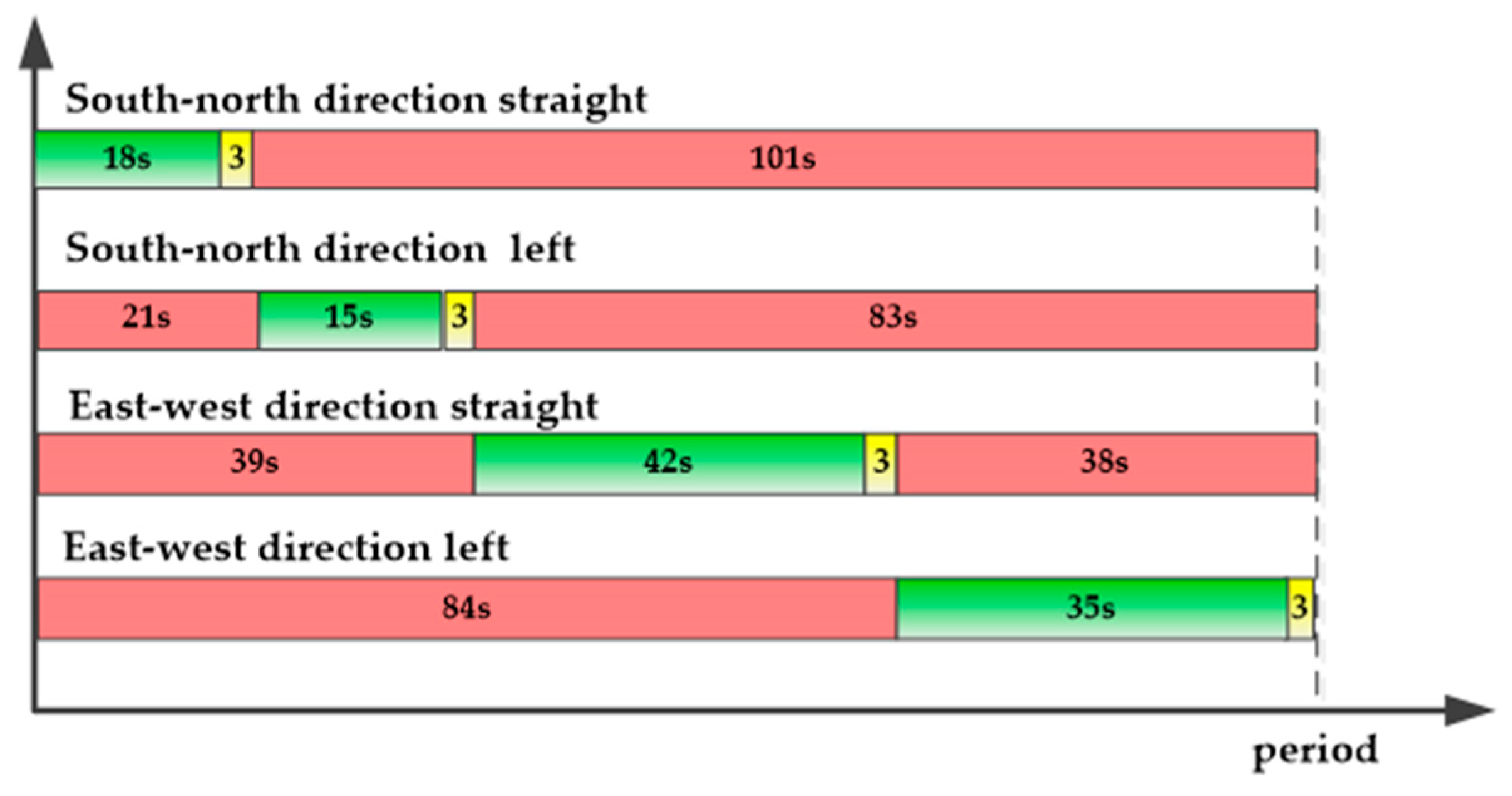
3.3. Signal Optimization Method
Current Phase Maximum Green Time Calculation
3.4. Signal Optimization
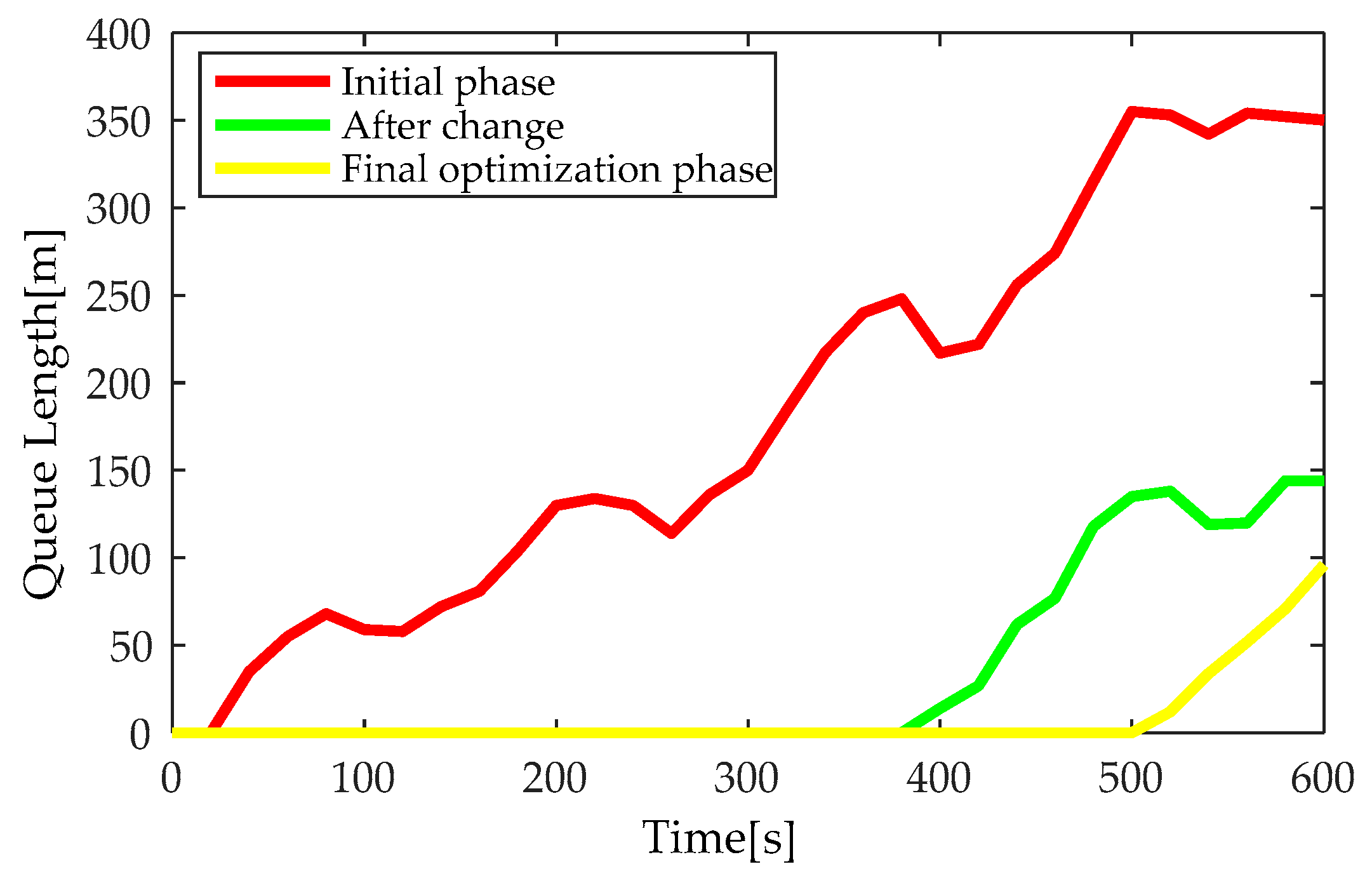
4. Simulation Analysis
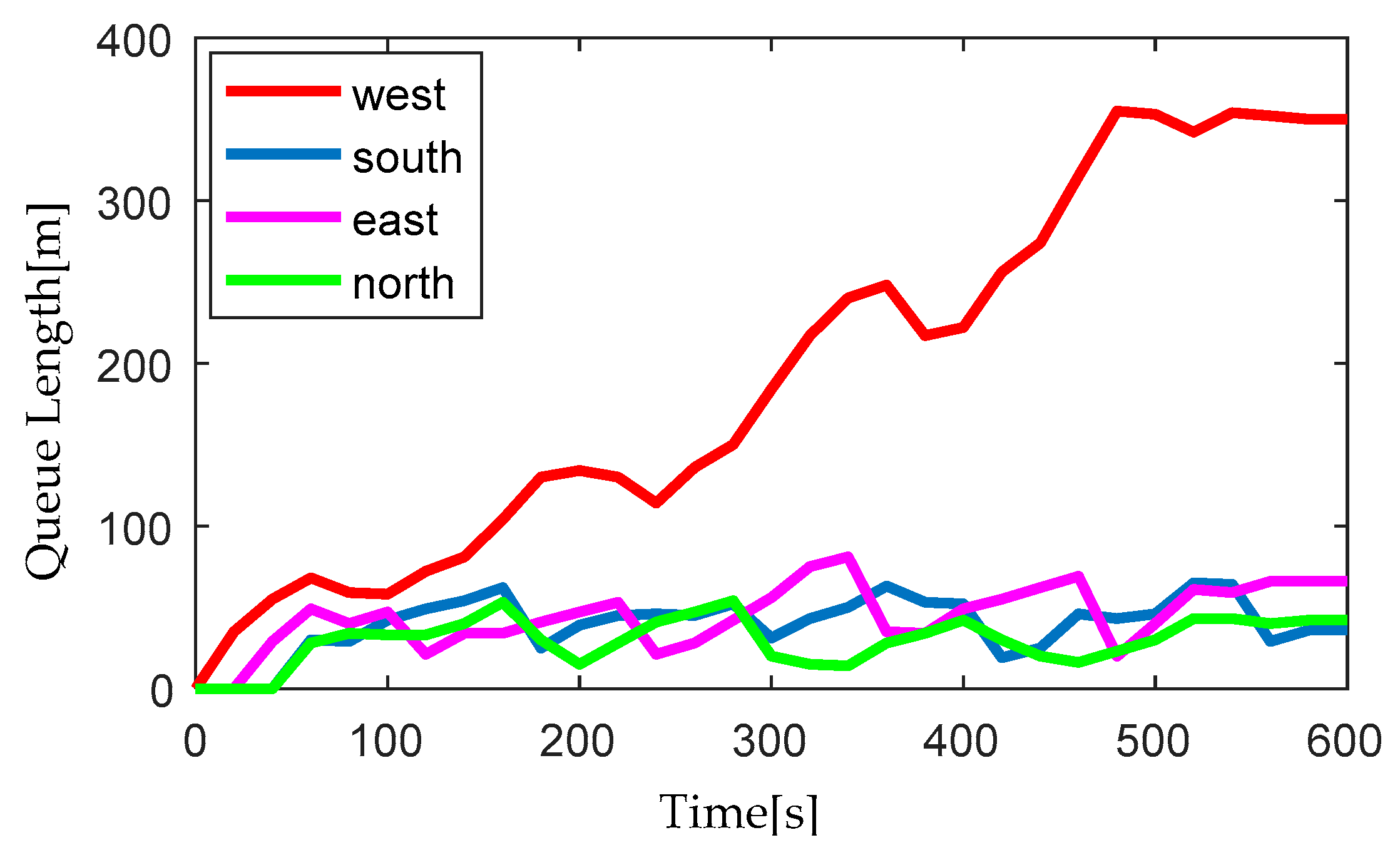
- (1)
- When the detector position was at 60% of the road, the blue line in the graph represents the change in the maximum queue length of the road. The initial moment of vehicle queuing was detected to be 320 s, and the arrival time of overflow was detected to be 500 s. The interval time was 180 s, that is, when the detecting point detects the vehicle, overflow will arrive after 1.5 cycles; so, the signal control needs to be implemented in 1.5 cycles.
- (2)
- When the detector position was at 70% of the road, the red line in the graph represents the change in the maximum queue length of the road. The initial moment of vehicle queuing was detected to be 440 s, and the arrival time of overflow was detected to be 500 s. The interval time was 60 s, that is, when the detecting point detects the vehicle, overflow will arrive after 0.5 cycles; so the signal control needs to be implemented in 0.5 cycles.
- (3)
- Similarly, when the detection point was located at 80% of the road, the signal control needs to be completed within 0.25 cycles.
5. Conclusions and Future Work
- (1)
- Establish vehicle travelling model;
- (2)
- Calculate the maximum control distance according to the model;
- (3)
- Queuing overflow logic judgment;
- (4)
- Optimal solution of queue overflow;
- (5)
- Simulation analysis.
Author Contributions
Funding
Conflicts of Interest
References
- Chang, J.; Bryan, B.; Xin, W. New signal control optimization policy for oversaturated arterial systems. In Proceedings of the Transportation Research Board 89th Annual Meeting, Washington, DC, USA, 10–14 January 2010. [Google Scholar]
- Wu, X.; Liu, H.X.; Gettman, D. Identifcation of oversaturated intersections using high-resolution traffic signal data. Transp. Res. C 2010, 18, 626–638. [Google Scholar] [CrossRef]
- Wu, X.; Liu, H.X.; Geroliminis, N. An empirical analysis on the arterial fundamental diagram. Transp. Res. B 2011, 45, 255–266. [Google Scholar] [CrossRef]
- Sun, H.Y.; Chen, D.J.; Xiao, L.; Li, L.; Wu, B. Design and Implementation of Red Belt Credit Control Strategy under Local Crowding. In Proceedings of the Seventh China ITS Annual Meeting, Beijing, China, 1 September 2012; pp. 178–185. [Google Scholar]
- Ma, Y.; Liu, L. Coordinated control strategy of green and red zones with partial congestion in main lines. City Transp. 2017, 15, 66–71. [Google Scholar]
- An, S.; Wang, Z.; Cui, J.; Wang, J. Research on regional evacuation traffic management based on conflict resolution at intersections. J. Harbin Inst. Technol. Soc. Sci. Ed. 2011, 13, 74–79. [Google Scholar]
- Yu, H.; Hegyi, A.; Yuan, Y.; Hoogendoorn, S. Resolving freeway jam waves by discrete first-order model-based predictive control of variable speed limits. Transp. Res. Part C 2017, 77, 405–420. [Google Scholar]
- Hu, W.; Yan, L.; Wang, H. Real-time traffic jams prediction inspired by Biham. Middleton and Levine (BML) model. Inf. Sci. 2017, 381, 209–228. [Google Scholar] [CrossRef]
- Eriskin, E.; Serdal, K.; Mehmet, T. Saltan Optimization of Traffic Signal Timing at Oversaturated Intersections Using Elimination Pairing System. Procedia Eng. 2017, 187, 295–300. [Google Scholar] [CrossRef]
- Agbolosu-Amison, S.J.; Yun, I.; Park, B.B. Quantifying Benefits of A Dynamic Gap-out Feature at an Actuated Traffic Signalized Intersection Under Cooperative Vehicle Infrastructure System. KSCE J. Civ. Eng. 2012, 16, 433–440. [Google Scholar] [CrossRef]
- Fortelle, A.D.L. Analysis of Reservation Algorithms for Cooperative Planning at Intersections. In Proceedings of the 13th International IEEE Annual Conference on Intelligent Transportation Systems, Funchal, Portugal, 19–22 September 2010; IEEE: New York, NY, USA, 2010; pp. 445–449. [Google Scholar]
- Lee, J.; Park, B. Development and Evaluation of a Cooperative Vehicle Intersection Control Algorithm Under the Connected Vehicles Environment. IEEE Trans. Intell. Transp. Syst. 2012, 13, 81–90. [Google Scholar] [CrossRef]
- Noah, J.; Brian, L.; Byungkyu, P. Traffic signal control with connected vehicles. In Proceedings of the 92th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 13–17 January 2013. [Google Scholar]
- Aloqaily, M.; Kantarci, B.; Mouftah, H.T. Multiagment/Multiobjective Intersection Game System for Service Provisioning in Vehicular Cloud. IEEE Access 2016, 4, 3153–3168. [Google Scholar]
- Aloqaily, M.; Kantarci, B.; Mouftah, H.T. An Auction-driven Multi-objective Provisioning Framework in a Vehicular Cloud. In Proceedings of the 2015 IEEE Globecom Workshop (GC Wkshps), San Diego, CA, USA, 6–10 December 2015; pp. 1–6. [Google Scholar]
- Aloqaily, M.; Kantarci, B.; Mouftah, H.T. Fairness-Aware Game Theoretic Approach for Service Management in Vehicular Clouds. In Proceedings of the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall), Toronto, ON, Canada, 24–27 September 2017; pp. 1–5. [Google Scholar]
- Aloqaily, M.; Al Ridhawi, I.; Kantarci, B.; Mouftah, H.T. Vehicle as a Resource for Continuous Service Availability in Smart Cities. In Proceedings of the 2017 IEEE 28th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Montreal, QC, Canada, 8–13 October 2017; pp. 1–6. [Google Scholar]
- Al Ridhawi, I.; Al Ridhawi, Y. QoS-Aware Service Composition in Mobile Cloud Networks. In Proceedings of the 2015 IEEE 7th International Conference on Cloud Computing Technology and Science(CloudCom), Vancouver, BC, Canada, 30 November–3 December 2015; pp. 448–453. [Google Scholar]
- Aloqaily, M.; Kantarci, B.; Mouftah, H.T. Trusted Third Party for Service Management in Vehicular Clouds. In Proceedings of the 2017 13th International Wireless Communications and Mobile Computing Conference (IWCMC), Valencia, Spain, 26–30 June 2017; pp. 928–933. [Google Scholar]
- Meneguette, R.I.; Boukerche, A.; Silva, F.A.; Villas, L.; Ruiz, L.B.; Loureiro, A.A. A Novel Self-Adaptive Content Delivery Protocol for Vehicular Networks. Ad. Hoc. Netw. 2018, 73, 1–13. [Google Scholar]
- Otoum, S.; Kantarci, B.; Mouftah, H.T. Mitigating False Negative Intruder Decisions in WSN-based Smart Grid Monitoring. In Proceedings of the 2017 13th International Wireless Communications and Mobile Computing Conference (IWCMC), Valencia, Spain, 26–30 June 2017; pp. 153–158. [Google Scholar]
- Lee, J.; Park, B.; Yun, I. Cumulative travel-time responsive real-time intersection control algorithm in the connected vehicle environment. J. Transp. Eng. 2013, 139, 1020–1029. [Google Scholar] [CrossRef]
- Guler, S.I.; Menendez, M.; Meier, L. Using connected vehicle technology to improve the efficiency of intersections. Transp. Res. Part C J. 2014, 46, 121–131. [Google Scholar] [CrossRef]
- Zhang, G.; Wang, Y. Optimizing Minimum and Maximum Green Time Settings for Traffic Actuated Control at Isolated Intersections. IEEE Trans. Intell. Transp. Syst. 2011, 12, 164–173. [Google Scholar] [CrossRef]
- Gu, Y.; Lin, P.; Liu, J.; Ran, B.; Xu, J. Queue Length Estimation of Intersection Traffic Flow Undera Connected Vehicles Environment. In Proceedings of the 15th COTA International Conference of Transportation Professionals, Beijing, China, 24–27 July 2015; pp. 500–512. [Google Scholar]
- Ma, D.; Wang, D.; Bie, Y.; Di, S. A Method of Signal Timing Optimization for Spillover Dissipation in Urban Street Networks. Math. Probl. Eng. 2013, 1, 1–9. [Google Scholar] [CrossRef]
- Webster, F.V. Traffic Signal Settings. Road Research Technical Paper 39; Road Research Laboratory, Her Majesty’s Stationery Office: London, UK, 1958. [Google Scholar]
- Rouphail, N.M.; Courage, K.G.; Strong, D.W. New Calculation Method for Existing and Extended HCM Delay Estimation Procedure. In Proceedings of the 85th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 22–26 January 2006. [Google Scholar]
- Sharma, A.D.M.; Bullock, J.; Bonneson, A. Input–Output and Hybrid Techniques for Real-Time Prediction of Delay and Maximum Queue Length at Signalized Intersections. In Transportation Research Record: Journal of the Transportation Research Board; No. 2035; Transportation Research Board of the National Academies: Washington, DC, USA, 2007; pp. 69–80. [Google Scholar]
- Liu, H.X.; Wu, X.; Ma, W.; Hu, H. Real-Time Queue Length Estimation for Congested Signalized Intersections. Transp. Res. Part C 2009, 17, 412–427. [Google Scholar] [CrossRef]
- Tiaprasert, K.; Zhang, Y.; Wang, X.B.; Zeng, X. Queue length estimation using connected vehicle technology for adaptive signal control. Trans. Intell. Transp. Syst. 2015, 16, 2129–2140. [Google Scholar] [CrossRef]
- Li, J.; Zhou, K.; Shladover, S.E.; Skabardonis, A. Estimating queue length under connected vehicle technology using probe vehicle, loop detector, and fused data. J. Transp. Res. Board 2013, 17–22. [Google Scholar] [CrossRef]
- Geroliminis, N.; Skabardonis, A. Identification and Analysis of Queue Spillovers in City Street Networks. IEEE Trans. Intell. Transp. Syst. 2011, 26, 1–9. [Google Scholar] [CrossRef]
- Zhou, B.; Wang, H.; Liu, H. A Single Intersection Traffic Signal Control Method Based on Vehicle Networking. In Proceedings of the Thirtieth China Control Conference, Hangzhou, China, 28–30 July 2015; pp. 8461–8465. [Google Scholar]
- Cai, C.; Wang, Y.; Greers, G. Vehicle-to-infrastructure communication-based adaptive traffic signal control. Intell. Transp. Syst. 2013, 7, 351–360. [Google Scholar] [CrossRef]
- Priemer, C.; Friedrich, B. A decentralized adaptive traffic signal control using V2I communication data. In Proceedings of the 12th International IEEE Conference on Intelligent Transportation Systems, St. Louis, MO, USA, 3–7 October 2009; pp. 765–770. [Google Scholar]
- CJJ 37-2012, Code for Urban Road Engineering Design; China Architecture Building Press: Beijing, China, 2016.
- Kong, L.; Xu, R.; Xu, Y.; Jiang, X. Investigation and Study on Pedestrian Crossing Speed at Signalized Intersection. Transp. Stand. Tion 2010, 235, 86–89. [Google Scholar]
- AI Ridhawi, I.; Aloqaily, M.; Kotb, Y.; AI Ridhawi, Y. A collaborative mobile edge computing and user solution for service composition in 5G systems. Trans. Emerg. Telecommun. Technol. 2018, 1–19. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model and Lane Type | Design Speed (km/h) | |
|---|---|---|
| 60 | ≤60 | |
| Oversize vehicle or mixed lane (m) | 3.75 | 3.50 |
| Passenger car lane (m) | 3.50 | 3.25 |
| Direction | Vehicle Flowrate (V/h) |
|---|---|
| West | 600 |
| East | 400 |
| North | 400 |
| South | 400 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, C.; Zhang, W.; Qin, L.; Sun, B. Queue Spillover Management in a Connected Vehicle Environment. Future Internet 2018, 10, 79. https://doi.org/10.3390/fi10080079
Ren C, Zhang W, Qin L, Sun B. Queue Spillover Management in a Connected Vehicle Environment. Future Internet. 2018; 10(8):79. https://doi.org/10.3390/fi10080079
Chicago/Turabian StyleRen, Chuanxiang, Wenbo Zhang, Lingqiao Qin, and Bo Sun. 2018. "Queue Spillover Management in a Connected Vehicle Environment" Future Internet 10, no. 8: 79. https://doi.org/10.3390/fi10080079
APA StyleRen, C., Zhang, W., Qin, L., & Sun, B. (2018). Queue Spillover Management in a Connected Vehicle Environment. Future Internet, 10(8), 79. https://doi.org/10.3390/fi10080079