Monitoring Deforestation in Rainforests Using Satellite Data: A Pilot Study from Kalimantan, Indonesia

 ,
,  , ,
, ,
Abstract
1. Introduction
2. Materials and Methods
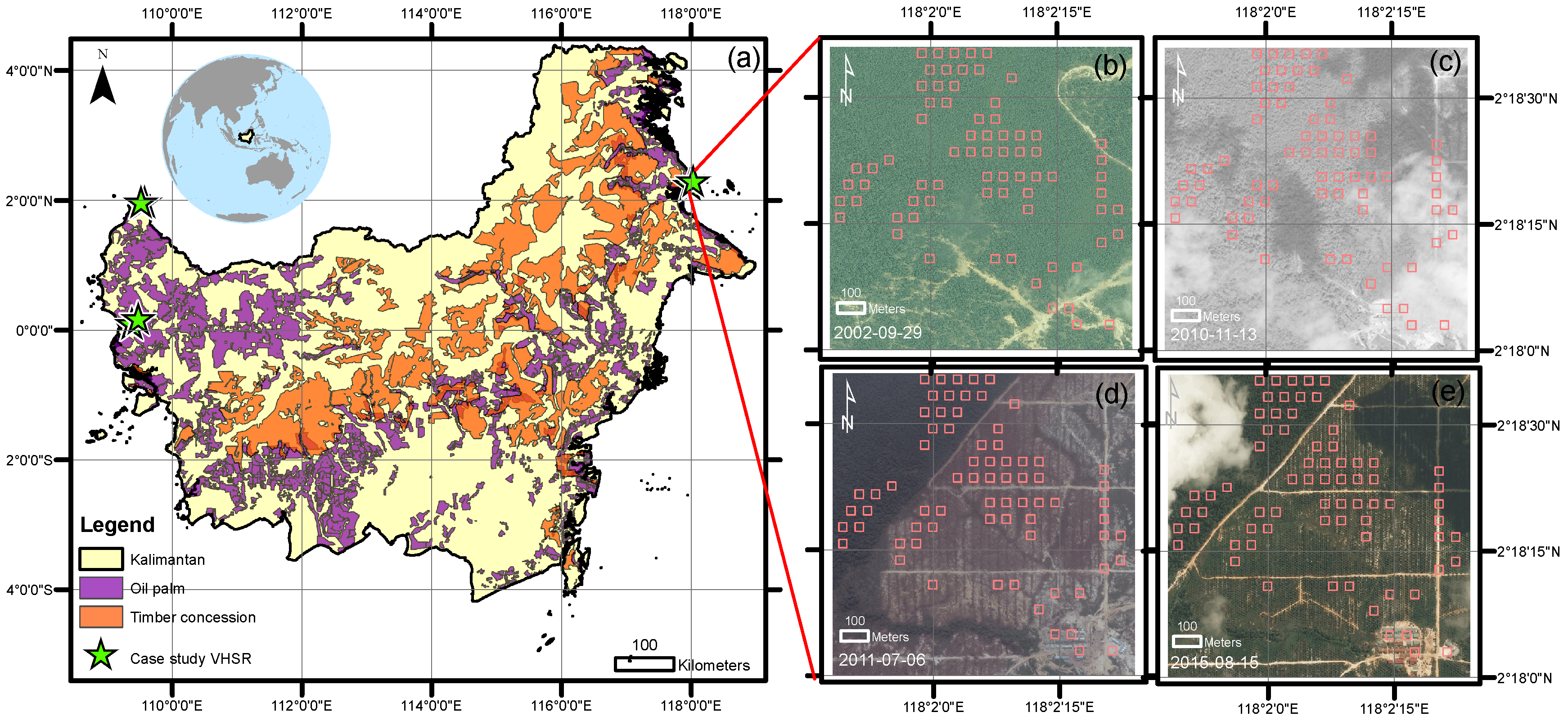
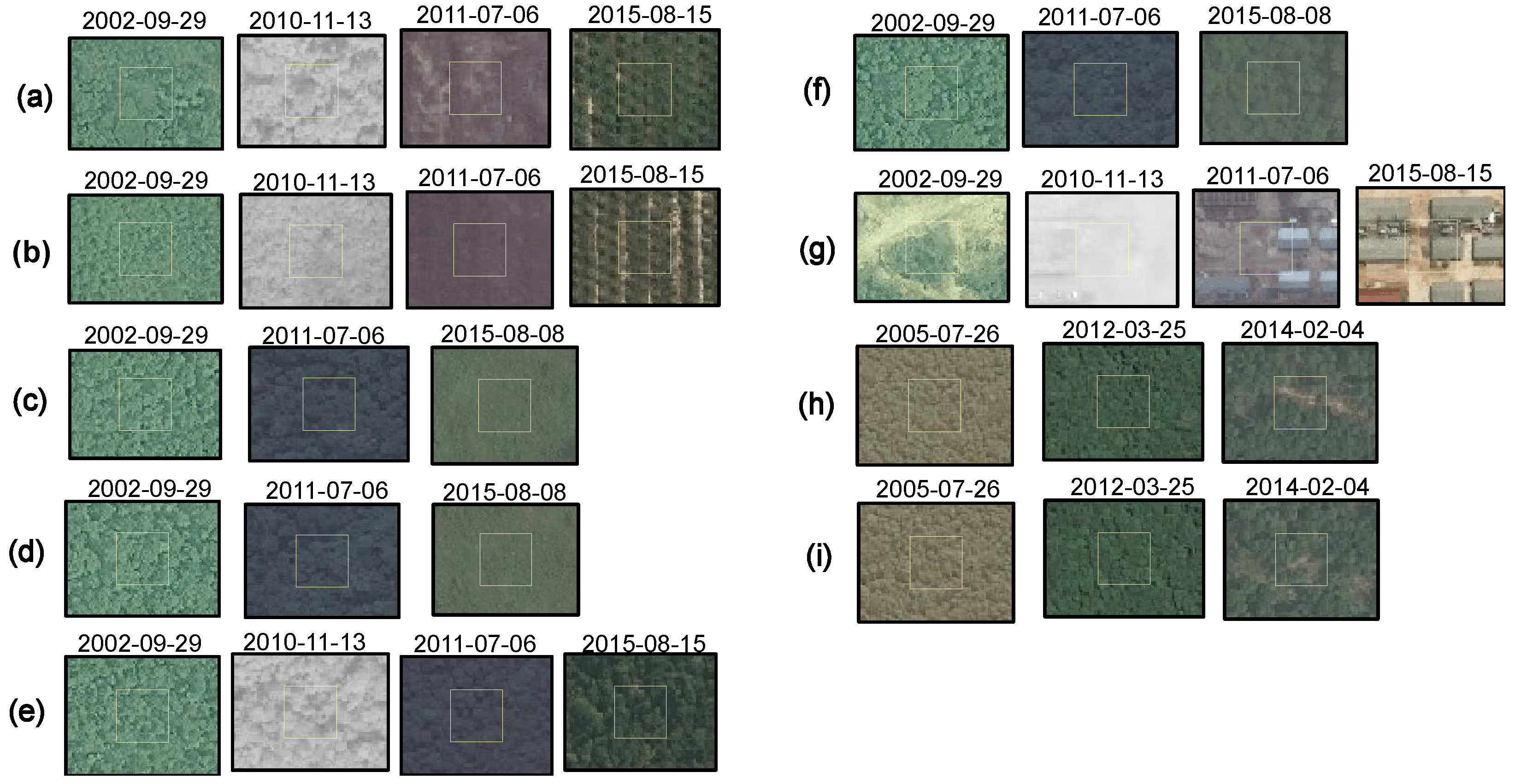
2.1. Case Study Area
2.2. Satellite Data
2.3. Deforestation Detection Algorithm
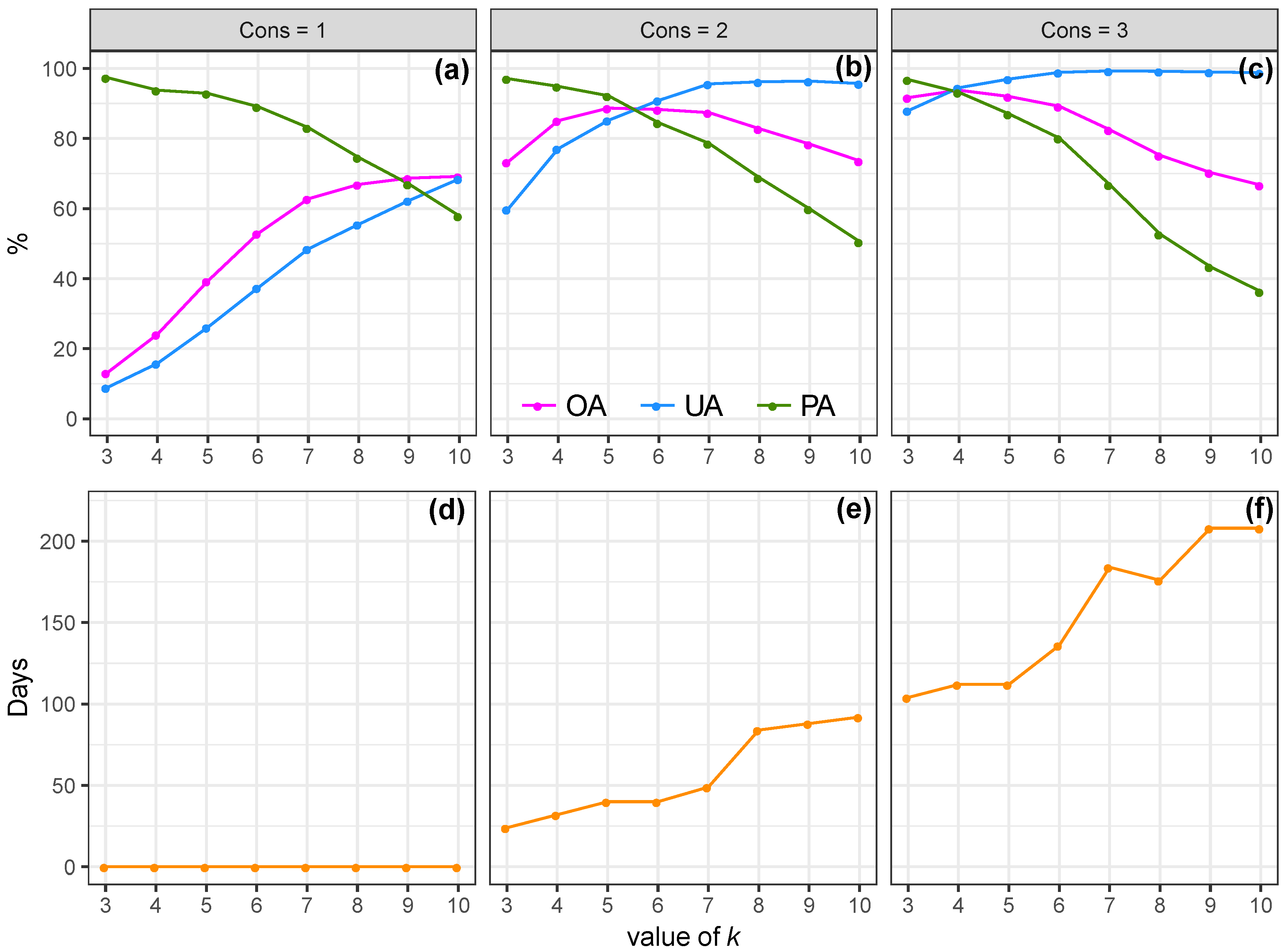
2.4. Spatial and Temporal Accuracy Assessment
3. Results
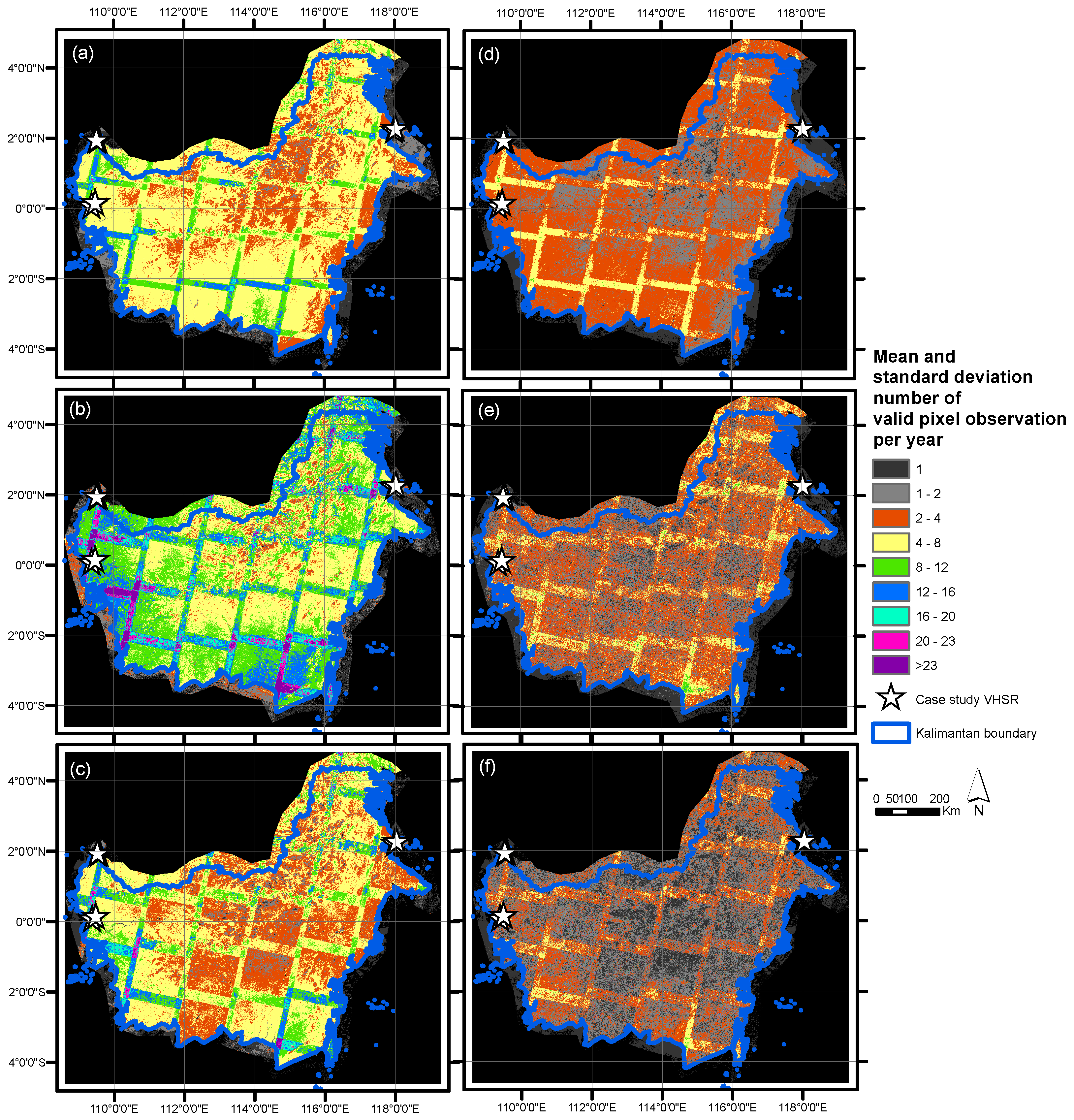
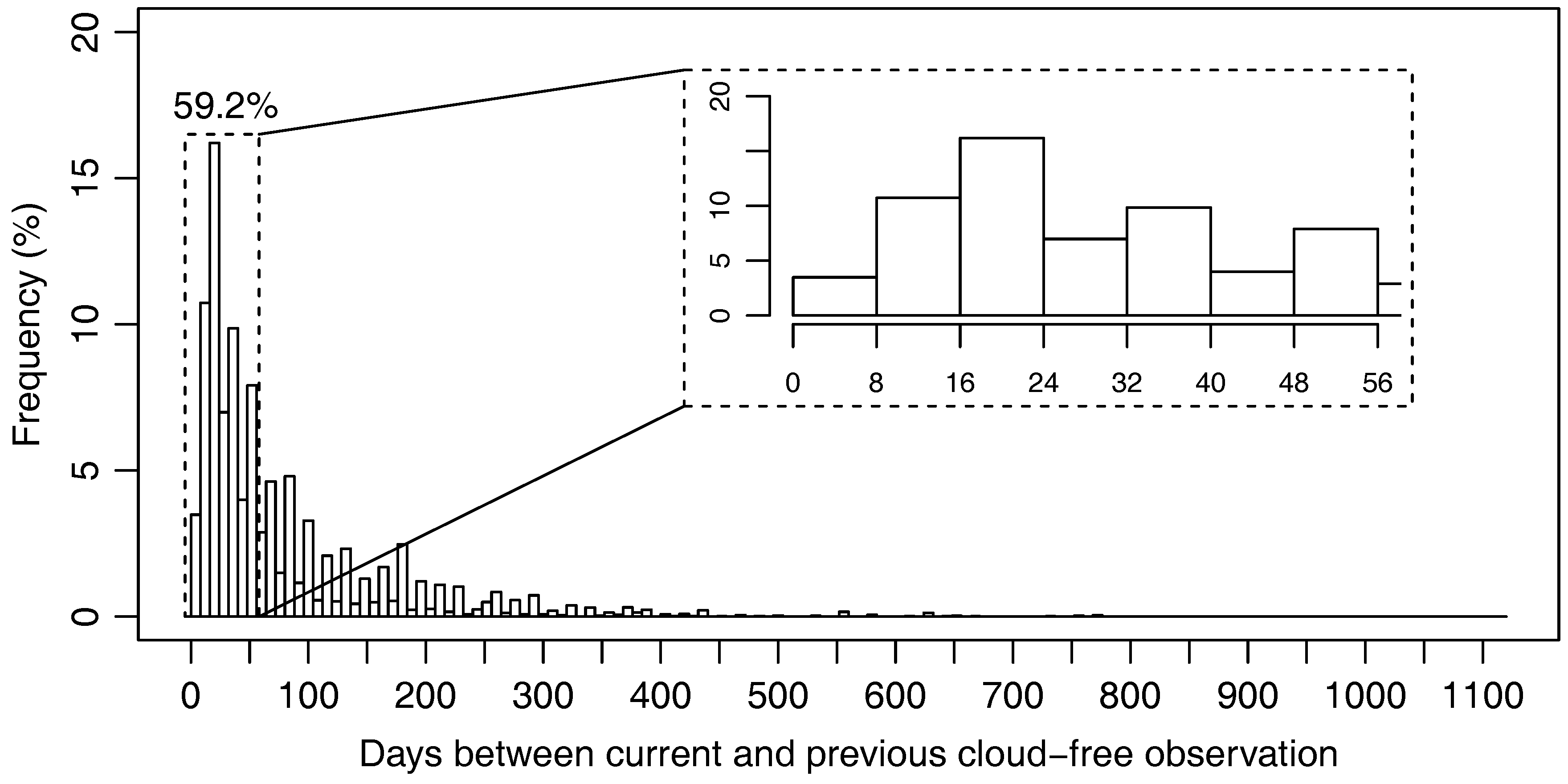
3.1. Availability of Landsat Cloud-Free Observations
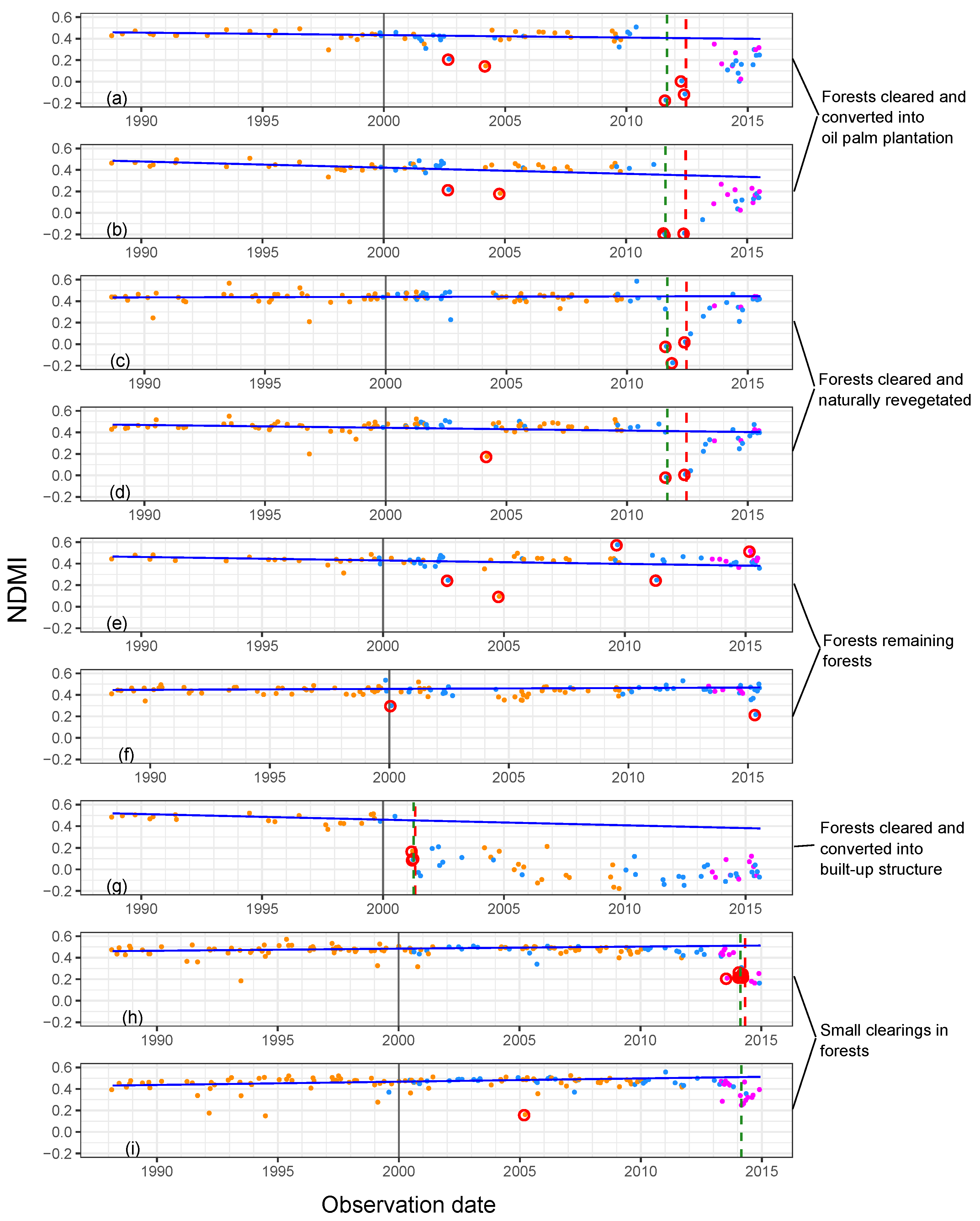
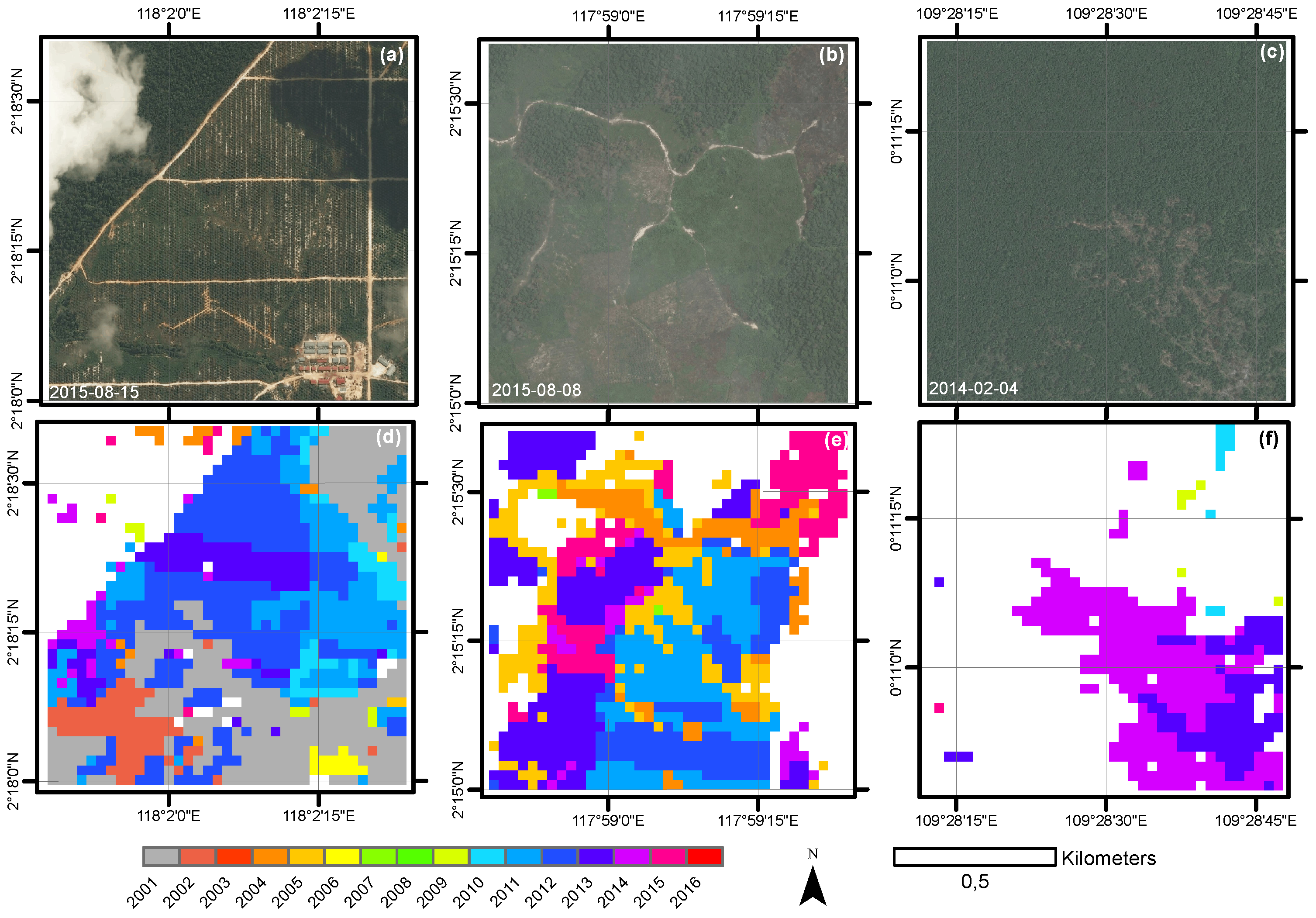
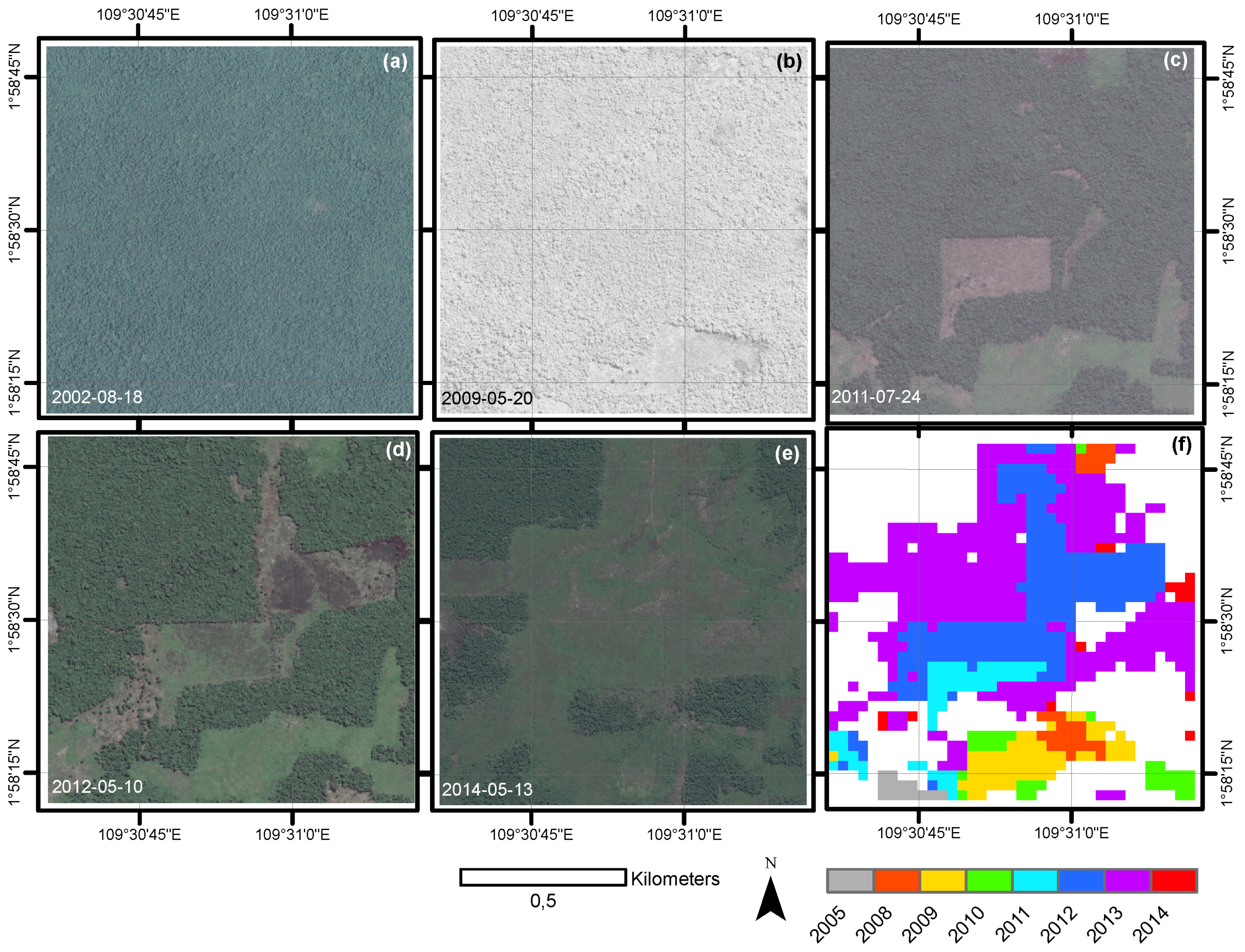
3.2. Demonstration of Deforestation Detection Algorithm
3.3. Spatial and Temporal Accuracies
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scene Extent (UL, UR, LR, LL) 1 | Date | Max. GSD 2 (m) | Satellite Sensor 3 | Image ID 4 |
|---|---|---|---|---|
| (E, N), | 29 September 2002 | 0.64 | QB02 | 10100100014C2400 |
| (E, N), | 13 November 2010 | 0.52 | WV01 | 1020010010994400 |
| (E, N), | 6 July 2011 | 0.51 | WV02 | 103001000C43D400 |
| (E, N) | 15 August 2015 | 0.48 | WV02 | 103001004745BD00 |
| (E, N), | 29 September 2002 | 0.64 | QB02 | 10100100014C2400 |
| (E, N), | 6 July 2011 | 0.51 | WV02 | 103001000C43D400 |
| (E, N), | 8 August 2015 | 0.32 | WV03 | 104001000F239500 |
| (E, N) | ||||
| (E, N), | 26 July 2005 | 0.66 | QB02 | 1010010004662000 |
| (E, N), | 25 March 2012 | 0.49 | WV02 | 10300100125BA700 |
| (E, N), | 4 February 2014 | 0.50 | WV02 | 103001002D511800 |
| (E, N) | ||||
| (E, N), | 18 August 2002 | 0.65 | QB02 | 101001000106D600 |
| (E, N), | 20 May 2009 | 0.50 | WV01 | 1020010008253A00 |
| (E, N), | 24 July 2011 | 0.48 | WV02 | 103001000CB05100 |
| (E, N) | 10 May 2012 | 0.47 | WV02 | 10300100184FB800 |
| 13 May 2014 | 0.48 | WV02 | 10300100308D4700 | |
| (E, N), | 26 July 2005 | 0.66 | QB02 | 1010010004662000 |
| (E, N), | 25 March 2012 | 0.49 | WV02 | 10300100125BA700 |
| (E, N), | 24 February 2014 | 0.50 | WV02 | 103001002D511800 |
| (E, N) | ||||
| (E, N), | 28 May 2009 | 0.71 | QB02 | 1010010009AE3300 |
| (E, N), | 16 July 2009 | 0.61 | QB02 | 1010010009F03000 |
| (E, N), | 24 July 2011 | 0.48 | WV02 | 103001000CB05100 |
| (E, N) | 13 May 2014 | 0.48 | WV02 | 10300100308D4700 |
Appendix B
| fordo |
| if then |
| for do |
| if all and then |
| break |
| else |
| end if |
| end for |
| end if |
| end for |
References
- United Nations Framework Convention on Climate Change. Adoption of the Paris Agreement. Technical Report, Paris. 2015. Available online: https://unfccc.int/files/essential_background/convention/application/pdf/english_paris_agreement.pdf (accessed on 1 June 2017).
- Van der Werf, G.R.; Morton, D.C.; DeFries, R.S.; Olivier, J.G.; Kasibhatla, P.S.; Jackson, R.B.; Collatz, G.J.; Randerson, J.T. CO2 emissions from forest loss. Nat. Geosci. 2009, 2, 737–738. [Google Scholar] [CrossRef]
- Baccini, A.; Goetz, S.J.; Walker, W.S.; Laporte, N.T.; Sun, M.; Sulla-Menashe, D.; Hackler, J.; Beck, P.S.A.; Dubayah, R.; Friedl, M.A.; Samanta, S.; Houghton, R.A. Estimated carbon dioxide emissions from tropical deforestation improved by carbon-density maps. Nat. Clim. Chang. 2012, 3, 182–185. [Google Scholar] [CrossRef]
- Le Quéré, C.; Andrew, R.M.; Canadell, J.G.; Sitch, S.; Ivar Korsbakken, J.; Peters, G.P.; Manning, A.C.; Boden, T.A.; Tans, P.P.; Houghton, R.A.; et al. Global Carbon Budget 2016. Earth Syst. Sci. Data 2016, 8, 605–649. [Google Scholar] [CrossRef]
- Houghton, R.A.; Byers, B.; Nassikas, A.A. A role for tropical forests in stabilizing atmospheric CO2. Nat. Clim. Chang. 2015, 5, 1022–1023. [Google Scholar] [CrossRef]
- Hansen, M.C.; Potapov, P.V.; Moore, R.; Hancher, M.; Turubanova, S.A.; Tyukavina, A.; Thau, D.; Stehman, S.V.; Goetz, S.J.; Loveland, T.R.; et al. High-Resolution Global Maps of 21st-Century Forest Cover Change. Science 2013, 342, 850–853. [Google Scholar] [CrossRef] [PubMed]
- Gaveau, D.L.A.; Sheil, D.; Husnayaen; Salim, M.A.; Arjasakusuma, S.; Ancrenaz, M.; Pacheco, P.; Meijaard, E. Rapid conversions and avoided deforestation: Examining four decades of industrial plantation expansion in Borneo. Sci. Rep. 2016, 6, 32017. [Google Scholar] [CrossRef] [PubMed]
- Margono, B.A.; Potapov, P.V.; Turubanova, S.; Stolle, F.; Hansen, M.C. Primary forest cover loss in Indonesia over 2000–2012. Nat. Clim. Chang. 2014, 4, 730–735. [Google Scholar] [CrossRef]
- Koh, L.P.; Miettinen, J.; Liew, S.C.; Ghazoul, J. Remotely sensed evidence of tropical peatland conversion to oil palm. Proc. Natl. Acad. Sci. USA 2011, 108, 5127–5132. [Google Scholar] [CrossRef] [PubMed]
- Gaveau, D.L.A.; Sloan, S.; Molidena, E.; Yaen, H.; Sheil, D.; Abram, N.K.; Ancrenaz, M.; Nasi, R.; Quinones, M.; Wielaard, N.; et al. Four Decades of Forest Persistence, Clearance and Logging on Borneo. PLoS ONE 2014, 9, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Avitabile, V.; Herold, M.; Heuvelink, G.B.M.; Lewis, S.L.; Phillips, O.L.; Asner, G.P.; Armston, J.; Ashton, P.S.; Banin, L.; Bayol, N.; et al. An integrated pan-tropical biomass map using multiple reference datasets. Glob. Chang. Biol. 2016, 22, 1406–1420. [Google Scholar] [CrossRef] [PubMed]
- Sullivan, M.J.; Talbot, J.; Lewis, S.L.; Phillips, O.L.; Qie, L.; Begne, S.K.; Chave, J.; Cuni-Sanchez, A.; Hubau, W.; Lopez-Gonzalez, G.; et al. Diversity and carbon storage across the tropical forest biome. Sci. Rep. 2017, 7, 39102. [Google Scholar] [CrossRef] [PubMed]
- GOFC-GOLD. A Sourcebook of Methods and Procedures for Monitoring and Reporting Anthropogenic Greenhouse Gas Emissions and Removals Associated with Deforestation, Gains and Losses of Carbon Stocks in Forests Remaining Forests, and Forestation; Technical Report; GOFC-GOLD Land Cover Project Office: Wageningen, The Netherlands; Wageningen University: Wageningen, The Netherlands, 2016. [Google Scholar]
- Wulder, M.A.; Masek, J.G.; Cohen, W.B.; Loveland, T.R.; Woodcock, C.E. Opening the archive: How free data has enabled the science and monitoring promise of Landsat. Remote Sens. Environ. 2012, 122, 2–10. [Google Scholar] [CrossRef]
- Austin, K.G.; González-Roglich, M.; Schaffer-Smith, D.; Schwantes, A.M.; Swenson, J.J. Trends in size of tropical deforestation events signal increasing dominance of industrial-scale drivers. Environ. Res. Lett. 2017, 12, 054009. [Google Scholar] [CrossRef]
- Pelletier, J.; Martin, D.; Potvin, C. REDD+ emissions estimation and reporting: Dealing with uncertainty. Environ. Res. Lett. 2013, 8, 034009. [Google Scholar] [CrossRef]
- Margono, B.A.; Turubanova, S.; Zhuravleva, I.; Potapov, P.; Tyukavina, A.; Baccini, A.; Goetz, S.; Hansen, M.C. Mapping and monitoring deforestation and forest degradation in Sumatra (Indonesia) using Landsat time series data sets from 1990 to 2010. Environ. Res. Lett. 2012, 7, 034010. [Google Scholar] [CrossRef]
- Zhu, Z. Change detection using landsat time series: A review of frequencies, preprocessing, algorithms, and applications. ISPRS J. Photogramm. Remote Sens. 2017, 130, 370–384. [Google Scholar] [CrossRef]
- Broich, M.; Hansen, M.C.; Potapov, P.; Adusei, B.; Lindquist, E.; Stehman, S.V. Time-series analysis of multi-resolution optical imagery for quantifying forest cover loss in Sumatra and Kalimantan, Indonesia. Int. J. Appl. Earth Obs. Geoinf. 2011, 13, 277–291. [Google Scholar] [CrossRef]
- Asner, G.P.; Keller, M.; Pereira, R., Jr.; Zweede, J.C.; Silva, J.N.M. Canopy Damage and Recovery After Selective Logging in Amazonia: Field and Satellite Studies. Ecol. Appl. 2004, 14, 280–298. [Google Scholar] [CrossRef]
- Cohen, W.B.; Healey, S.P.; Yang, Z.; Stehman, S.V.; Brewer, C.K.; Brooks, E.B.; Gorelick, N.; Huang, C.; Hughes, M.J.; Kennedy, R.E.; et al. How Similar Are Forest Disturbance Maps Derived from Different Landsat Time Series Algorithms? Remote Sens. 2017, 8, 98. [Google Scholar] [CrossRef]
- Fuller, D.O.; Jessup, T.C.; Salim, A. Loss of Forest Cover in Kalimantan, Indonesia, Since the 1997–1998 El Nino. Conserv. Biol. 2004, 18, 249–254. [Google Scholar] [CrossRef]
- MacKinnon, K.; Hatta, G.; Halim, H.; Mangalik, A. The Ecology of Kalimantan; Periplus Editions: Hong Kong, China, 1996; p. 802. [Google Scholar]
- Margono, B.A.; Potapov, P.; Turubanova, S.; Stolle, F.; Hansen, M. Primary forest cover loss in Indonesia over 2000–2012. Available online: http://www.glad.umd.edu/dataset/primary-forest-cover-loss-indonesia-2000-2012 (accessed on 20 June 2017).
- Indonesia Ministry of Forestry, Greenpeace, and WRI. “Indonesia Oil Palm Concessions”. Available online: www.globalforestwatch.org (accessed on 20 June 2017).
- Indonesia Ministry of Forestry, Greenpeace, and WRI. “Indonesia Logging Concessions”. Available online: www.globalforestwatch.org (accessed on 20 June 2017).
- Protecting Forests & Peatlands in Indonesia. Available online: http://www.greenpeace.org/seasia/id/Global/seasia/Indonesia/Code/Forest-Map/en/data.html (accessed on 20 June 2017).
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Google Earth Engine API—Introduction. Available online: https://developers.google.com/earth-engine/ (accessed on 1 July 2017).
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2017. [Google Scholar]
- Zhu, Z.; Woodcock, C.E. Object-based cloud and cloud shadow detection in Landsat imagery. Remote Sens Environ. 2012, 118, 83–94. [Google Scholar] [CrossRef]
- USGS. U.S. Geological Survey. Available online: https://landsat.usgs.gov/landsat-surface-reflectance-data-products (accessed on 1 June 2017).
- Masek, J.G.; Vermote, E.F.; Saleous, N.E.; Wolfe, R.; Hall, F.G.; Huemmrich, K.F.; Gao, F.; Kutler, J.; Lim, T.K. A landsat surface reflectance dataset for North America, 1990–2000. IEEE Geosci. Remote Sens. Lett. 2006, 3, 68–72. [Google Scholar] [CrossRef]
- Vermote, E.; Justice, C.; Claverie, M.; Franch, B. Preliminary analysis of the performance of the Landsat 8/OLI land surface reflectance product. Remote Sens. Environ. 2016, 185, 46–56. [Google Scholar] [CrossRef]
- USGS. U.S. Geological Survey. Available online: https://landsat.usgs.gov/what-are-band-designations-landsat-satellites (accessed on 1 June 2017).
- Kovalskyy, V.; Roy, D.P. The global availability of Landsat 5 TM and Landsat 7 ETM+ land surface observations and implications for global 30m Landsat data product generation. Remote Sens. Environ. 2013, 130, 280–293. [Google Scholar] [CrossRef]
- DeVries, B.; Decuyper, M.; Verbesselt, J.; Zeileis, A.; Herold, M.; Joseph, S. Tracking disturbance-regrowth dynamics in tropical forests using structural change detection and Landsat time series. Remote Sens. Environ. 2015, 169, 320–334. [Google Scholar] [CrossRef]
- Rouse, J.W.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring the Vernal Advancement and Retrogradation (Green Wave Effect) of Natural Vegetation; Technical Report; NASA/GSFC: Greenbelt, MD, USA, 1973.
- Huete, A.; Didan, K.; Miura, T.; Rodriguez, E.; Gao, X.; Ferreira, L. Overview of the radiometric and biophysical performance of the MODIS vegetation indices. Remote Sens. Environ. 2002, 83, 195–213. [Google Scholar] [CrossRef]
- Gao, B.C. NDWI—A normalized difference water index for remote sensing of vegetation liquid water from space. Remote Sens. Environ. 1996, 58, 257–266. [Google Scholar] [CrossRef]
- Key, C.H.; Benson, N.C. Landscape Assessment (LA). FIREMON: Fire Effects Monitoring and Inventory System; Gen. Tech. Rep. RMRS-GTR-164-CD, Technical Report; U.S. Department of Agriculture, Forest Service, Rocky Mountain Research Station: Fort Collins, CO, USA, 2006.
- Schultz, M.; Clevers, J.G.P.W.; Carter, S.; Verbesselt, J.; Avitabile, V.; Quang, H.V.; Herold, M. Performance of vegetation indices from Landsat time series in deforestation monitoring. Int. J. Appl. Earth Obs. Geoinf. 2016, 52, 318–327. [Google Scholar] [CrossRef]
- Crist, E.P. A TM Tasseled Cap Equivalent Transformation for Reflectance Factor Data. Remote Sens. Environ. 1985, 17, 301–306. [Google Scholar] [CrossRef]
- Hamunyela, E.; Verbesselt, J.; Roerink, G.; Herold, M. Trends in spring phenology of western European deciduous forests. Remote Sens. 2013, 5, 6159–6179. [Google Scholar] [CrossRef]
- Houborg, R.; McCabe, M.F. A Cubesat enabled Spatio-Temporal Enhancement Method (CESTEM) utilizing Planet, Landsat and MODIS data. Remote Sens. Environ. 2018, 209, 211–226. [Google Scholar] [CrossRef]
- Miettinen, J.; Stibig, H.J.; Achard, F. Remote sensing of forest degradation in Southeast Asia-Aiming for a regional view through 5–30 m satellite data. Glob. Ecol. Conserv. 2014, 2, 24–36. [Google Scholar] [CrossRef]
- Olofsson, P.; Foody, G.M.; Herold, M.; Stehman, S.V.; Woodcock, C.E.; Wulder, M.A. Good practices for estimating area and assessing accuracy of land change. Remote Sens. Environ. 2014, 148, 42–57. [Google Scholar] [CrossRef]
- Reiche, J.; Hamunyela, E.; Verbesselt, J.; Hoekman, D.; Herold, M. Improving near-real time deforestation monitoring in tropical dry forests by combining dense Sentinel-1 time series with Landsat and ALOS-2 PALSAR-2. Remote Sens. Environ. 2018, 204, 147–161. [Google Scholar] [CrossRef]
- Romijn, E.; De Sy, V.; Herold, M.; Böttcher, H.; Roman-Cuesta, R.M.; Fritz, S.; Schepaschenko, D.; Avitabile, V.; Gaveau, D.; Verchot, L.; et al. Independent data for transparent monitoring of greenhouse gas emissions from the land use sector—What do stakeholders think and need? Environ. Sci. Policy 2018, 85, 101–112. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E. Continuous change detection and classification of land cover using all available Landsat data. Remote Sens. Environ. 2014, 144, 152–171. [Google Scholar] [CrossRef]
- Hamunyela, E.; Verbesselt, J.; Herold, M. Using spatial context to improve early detection of deforestation from Landsat time series. Remote Sens. Environ. 2016, 172, 126–138. [Google Scholar] [CrossRef]
- DeVries, B.; Verbesselt, J.; Kooistra, L.; Herold, M. Robust monitoring of small-scale forest disturbances in a tropical montane forest using Landsat time series. Remote Sens. Environ. 2015, 161, 107–121. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E. Automated cloud, cloud shadow, and snow detection in multitemporal Landsat data: An algorithm designed specifically for monitoring land cover change. Remote Sens. Environ. 2014, 152, 217–234. [Google Scholar] [CrossRef]
- Hansen, M.C.; Krylov, A.; Tyukavina, A.; Potapov, P.V.; Turubanova, S.; Zutta, B.; Ifo, S.; Margono, B.; Stolle, F.; Moore, R. Humid tropical forest disturbance alerts using Landsat data. Environ. Res. Lett. 2016, 11, 034008. [Google Scholar] [CrossRef]
- Hansen, M.C.; Krylov, A.; Tyukavina, A.; Potapov, P.V.; Turubanova, S.; Zutta, B.; Ifo, S.; Margono, B.; Stolle, F.; Moore, R. Humid tropical forest disturbance alerts using Landsat data. Available online: http://data.globalforestwatch.org/datasets/194662b1470e4c5f81aa370395c75485_8 (accessed on 11 June 2018).
- See, L.; Laso Bayas, J.; Schepaschenko, D.; Perger, C.; Dresel, C.; Maus, V.; Salk, C.; Weichselbaum, J.; Lesiv, M.; McCallum, I.; et al. LACO-Wiki: A New Online Land Cover Validation Tool Demonstrated Using GlobeLand30 for Kenya. Remote Sens. 2017, 9, 754. [Google Scholar] [CrossRef]
- Pasquarella, V.; Holden, C.E.; Woodcock, C.E. Improved mapping of forest types using spectral-temporal Landsat features. Remote Sens. Environ. 2018, 210, 193–207. [Google Scholar] [CrossRef]
- Phompila, C.; Lewis, M.; Ostendorf, B.; Clarke, K. MODIS EVI and LST temporal response for discrimination of tropical land covers. Remote Sens. 2015, 7, 6026–6040. [Google Scholar] [CrossRef]
- Tropek, R.; Beck, J.; Keil, P.; Musilová, Z.; Irena, Š.; Storch, D. Comment on “High-resolution global maps of 21st-century forest cover change”. Science 2014, 344, 981. [Google Scholar] [CrossRef] [PubMed]
- Hansen, M.; Potapov, P.; Margono, B.; Stehman, S.; Turubanova, S.; Tyukavina, A. Response to comment on “High-resolution global maps of 21st-century forest cover change”. Science 2014, 344, 981. [Google Scholar] [CrossRef] [PubMed]
- Carlson, K.M.; Curran, L.M.; Asner, G.P.; Pittman, A.M.; Trigg, S.N.; Marion Adeney, J. Carbon emissions from forest conversion by Kalimantan oil palm plantations. Nat. Clim. Chang. 2013, 3, 283–287. [Google Scholar] [CrossRef]
- Austin, K.G.; Mosnier, A.; Pirker, J.; McCallum, I.; Fritz, S.; Kasibhatla, P.S. Shifting patterns of oil palm driven deforestation in Indonesia and implications for zero-deforestation commitments. Land Use Policy 2017, 69, 41–48. [Google Scholar] [CrossRef]
- Miettinen, J.; Shi, C.; Liew, S.C. Towards automated 10–30 m resolution land cover mapping in insular South-East Asia. Geocarto Int. 2017, 1–15. [Google Scholar] [CrossRef]
- Vogeler, J.; Braaten, J.; Slesak, R.; Falkowski, M. Extracting the full value of the Landsat archive: Inter-sensor harmonization for the mapping of Minnesota forest canopy cover (1973–2015). Remote Sens. Environ. 2018, 209, 363–374. [Google Scholar] [CrossRef]
- Chazdon, R.L. Chance and Determinism in Tropical Forest Succession. In Tropical Forest Community Ecology; Carson, W.P., Schnitzer, S.A., Eds.; Wiley-Blackwell: Chichester, UK, 2008; Chapter 23; pp. 384–408. [Google Scholar]
- Mora, F.; Jaramillo, V.J.; Bhaskar, R.; Gavito, M.; Siddique, I.; Byrnes, J.E.; Balvanera, P. Carbon Accumulation in Neotropical Dry Secondary Forests: The Roles of Forest Age and Tree Dominance and Diversity. Ecosystems 2018, 21, 536–550. [Google Scholar] [CrossRef]
- Sierra, C.A.; del Valle, J.I.; Restrepo, H.I. Total carbon accumulation in a tropical forest landscape. Carbon Balance Manag. 2012, 7, 12. [Google Scholar] [CrossRef] [PubMed]
- Sentinel-2 Mission Status Report 125 Reference Period: 24 February–2 March 2018. Available online: https://sentinel.esa.int/documents/247904/3347201/Sentinel-2-Mission-Status-Report-125-24-Feb-02-Mar-2018 (accessed on 28 March 2018).
- Li, J.; Roy, D.P. A Global Analysis of Sentinel-2A, Sentinel-2B and Landsat-8 Data Revisit Intervals and Implications for Terrestrial Monitoring. Remote Sens. 2017, 9, 902. [Google Scholar]
- Upcoming Sentinel-2 Level-2A Product Evolution. Available online: https://sentinel.esa.int/web/sentinel/missions/sentinel-2/news/-/article/upcoming-sentinel-2-level-2a-product-evolution (accessed on 28 March 2018).
- Harmonized Landsat Sentinel-2. Available online: https://hls.gsfc.nasa.gov/ (accessed on 28 March 2018).
- Wulder, M.A.; Hilker, T.; White, J.C.; Coops, N.C.; Masek, J.G.; Pflugmacher, D.; Crevier, Y. Virtual constellations for global terrestrial monitoring. Remote Sens. Environ. 2015, 170, 62–76. [Google Scholar] [CrossRef]
- Wulder, M.A.; Coops, N.C.; Roy, D.P.; White, J.C.; Hermosilla, T. Land cover 2.0. Int. J. Remote Sens. 2018, 39, 4254–4284. [Google Scholar] [CrossRef]










| History Noise Removal | cons | k | OA (%) | UA (%) | PA (%) | MTL (days) | MTL (# obs) |
|---|---|---|---|---|---|---|---|
| No | 3 | 4 | 93.8 | 94.5 | 93.2 | 112 | 2 |
| Yes | 3 | 4 | 94.7 | 95.0 | 94.6 | 112 | 2 |
| No | 2 | 5.5 | 88.7 | 87.0 | 89.9 | 40 | 1 |
| Yes | 2 | 5.5 | 89.0 | 85.3 | 92.7 | 40 | 1 |
| Reference | |||||||
|---|---|---|---|---|---|---|---|
| Non-Deforestation | Deforestation | Sum | UA (%) | PA (%) | OA (%) | ||
| Predicted | Non-deforestation | 208 | 22 | 230 | 90.4 | 93.7 | 91.0 |
| Deforestation | 14 | 155 | 169 | 91.7 | 87.6 | ||
| Sum | 222 | 177 | 399 | ||||
| Reference | |||||||
|---|---|---|---|---|---|---|---|
| Non-Deforestation | Deforestation | Sum | UA (%) | PA (%) | OA (%) | ||
| Predicted | Non-deforestation | 204 | 9 | 213 | 95.8 | 98.1 | 96.7 |
| Deforestation | 4 | 182 | 186 | 97.8 | 95.3 | ||
| Sum | 208 | 191 | 399 | ||||
| GFW | ||||
|---|---|---|---|---|
| Non-Deforestation | Deforestation | Sum | ||
| This study | Non-deforestation | 211 | 2 | 213 |
| Deforestation | 19 | 167 | 186 | |
| Sum | 230 | 169 | 399 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hadi; Krasovskii, A.; Maus, V.; Yowargana, P.; Pietsch, S.; Rautiainen, M. Monitoring Deforestation in Rainforests Using Satellite Data: A Pilot Study from Kalimantan, Indonesia. Forests 2018, 9, 389. https://doi.org/10.3390/f9070389
Hadi, Krasovskii A, Maus V, Yowargana P, Pietsch S, Rautiainen M. Monitoring Deforestation in Rainforests Using Satellite Data: A Pilot Study from Kalimantan, Indonesia. Forests. 2018; 9(7):389. https://doi.org/10.3390/f9070389
Chicago/Turabian StyleHadi, Andrey Krasovskii, Victor Maus, Ping Yowargana, Stephan Pietsch, and Miina Rautiainen. 2018. "Monitoring Deforestation in Rainforests Using Satellite Data: A Pilot Study from Kalimantan, Indonesia" Forests 9, no. 7: 389. https://doi.org/10.3390/f9070389
APA StyleHadi, Krasovskii, A., Maus, V., Yowargana, P., Pietsch, S., & Rautiainen, M. (2018). Monitoring Deforestation in Rainforests Using Satellite Data: A Pilot Study from Kalimantan, Indonesia. Forests, 9(7), 389. https://doi.org/10.3390/f9070389