1. Introduction
For many decades, forest economy has been squeezed between decreasing product value and increasing labor cost, and this trend does not seem to be stopping any time soon—if at all. The classic solution is found in improving the efficiency of forest management, obtained by mechanizing operations through a considerable capital commitment. Against this background, economy of scale is the key to success, which conflicts with the decreasing size of many private forests as they get fragmented through heritage lines, often as part of the restitution process [
1].
Many low-investment solutions have been proposed over time to increase labor productivity and yet small-scale technology cannot completely offset the efficiency gap with large-scale industrial operations [
2]. In any case, technology improvements are designed to cut costs and they only tackle one side of the problem, while doing very little to address the other one, namely value recovery [
3]. Most previous attempts to increase value recovery have focused on the manufacturing of high-value niche products that cannot be sold in large numbers on the commodity market. However, not all high-value products are niche products: in that regard, wooden posts represent a fortunate exception. They offer three important advantages: first, they carry a much higher price than any comparable small-size assortment; second, they can be manufactured from low-value small wood; third, they can be effectively produced with low-cost technology, especially suited to small-scale operations.
A large and expanding market for wooden posts is offered by activities such as mining, gardening, and agriculture. In particular, fruit growers offer attractive prices for quality posts, which are sold by the piece, and may attain the equivalent of 190 € m
−3, which is three times the price that one could obtain by selling the same material as firewood [
4,
5].
Furthermore, upgrading small wood to post standards is a straightforward operation that only requires sorting and debarking [
6]. These operations are easily mechanized using low-cost equipment, generally a simple debarking machine powered by an industrial electric motor or by a farm tractor. Most small-scale debarkers are of the knife type, and employ a fast-spinning disk fitted with five or six radial knives that works very much like a planer. During work, the post is pushed with its sides against the turning disk, while a spiral-patterned feed roller makes it turn around its longitudinal axis so that all the external surface of the post will touch the spinning disk. The result is high-quality debarking, where most of the bark is shaved off the post surface, together with some of the wood on the eventual bumps and bends. As a result, the post is somewhat “straightened”, adding to the aesthetic quality of the product, which is generally appreciated by customers.
This process is largely manual, which raises the question about the impact on operator safety and health. In particular, cycles repeat with some frequency, estimated at over 50 full cycles an hour [
5]. Such a labor-intensive and repetitive job raises the obvious question about the potential strain on the musculo-skeletal system of workers, and makes a correct postural assessment especially important. Repeated over and over again, poor body postures may lead to musculo-skeletal disease, and that possibility defines postural risk. There is every reason to believe that the population potentially affected is relatively large. While no data are available on the actual numbers, one may produce a plausible estimate starting from the production volumes reported in the Eurostat database [
7]. This offers a conservative estimate of around 500,000 m
3 per year, for EU 28—although much of the production is concentrated in France, Austria, Italy, Portugal, and Spain (in descending order of production). Dividing this figure by a mean debarking productivity equal to 1.5 m
3 per hour [
5], one obtains over 333,000 h, or 450 full jobs, without considering all self-employed operations that go unrecorded. What is more, the demand for wooden posts is expanding and therefore the number of operators potentially affected is going to increase over the years.
Despite the large potential impact on the rural workforce, the ergonomic evaluation of post debarking has attracted little scientific interest so far. To our knowledge, the subject has never been addressed by any study—recent or old. This is a knowledge gap that needs filling, especially if one considers the large number of workers involved in post debarking and the wide variety of machines available for the task.
While a single study cannot fill this gap, it may still represent a good start and attract further attention by other research teams, eventually leading to an exhaustive ergonomic evaluation of this task. Post debarking consists of a fast and repetitive sequence of loading, pushing, and unloading, during which time operators will assume the same postures over and over again. That makes it worthwhile to investigate the risk for work-related musculo-skeletal disorders (WMSD), as a first step in the ergonomic evaluation of debarking duties. The fact that most operations are small-scale and are managed by small-medium enterprises (SMEs) makes the need for analysis more urgent, because working conditions in SMEs are known to be generally poorer than in larger and structured enterprises [
8].
The ergonomic assessment of post debarking should cover a wide range of solutions, capable of representing the majority of operational set ups, characterized by various levels of refinement and ergonomic performance. Differences are likely to be important between machines that are equipped with a feeding deck and machines that are not.
Therefore, the goal of this study was to assess the postural risk associated with post debarking work, performed with a range of post debarking machines and set-ups capable of representing the main technical solutions currently available to small-scale operators. In particular, the study aimed to: (1) produce a benchmark for postural risk in small-scale post debarking work; (2) compare different machine designs and operation layouts in terms of postural risk; and (3) determine what specific work tasks incur the highest postural risk. The results of the study will inform recommendations for work safety supervision and machine design in the post debarking sector.
2. Materials and Methods
The study was conducted on six small-scale post debarking operations, taken as representative of the larger population of small-scale debarking operators. These operations were located in Northern and Central Italy, so as to cover a reasonably wide range of working conditions (
Table 1). All operations were owned by small enterprises and all 12 workers involved in the trials were mesomorphic adult males, with an age between 30 and 55 years and a work experience of at least five years. Although different workers were employed for different operations, the skills and the anthropometric characteristics of the workers were considered generally representative of the workers in the region [
9].
The six operations represented three of the most popular debarking machines, as follows: Rabaud Robopel 250 (four units), Pribo MSP 25 (one unit), and Neuhauser GS (one unit). These machines were all disk type and processed one post at a time. All machines in the study were simple and inexpensive (≤30,000 €), which made them especially suited for small-scale operations, compared with the large automated ring-, drum-, and rosser head-debarkers used at sawmills and pulpmills. Technical differences between the study machines were minor, and were found in some mechanical details. The most meaningful differences were in the way that the operations were set up, which implied a different work organization and different postural risk (
Figure 1).
All units were stationed at wood yards and processed small logs sourced from chestnut (Castanea sativa L.) and locust (Robinia pseudacacia L.) coppice stands. Five units were powered by electric motors, whereas one was powered by a tractor, using the power take-off (PTO). Four units (A, D, E, F) were provided with a loading deck, in order to speed up loading and reduce worker effort. Decks consisted of a simple metal structure, designed to bring the posts to the same level as the debarker infeed chute and prevent the worker from bending down to lift the posts off the floor. When a loading deck was provided, posts were easily placed on the deck with a forklift. However, posts were moved from the deck to the debarker infeed chute manually, eventually using a sappie or a similar tool. Units B and C had no loading deck, which forced workers to manually lift and carry the posts from the piles and place them on the infeed chute.
All debarkers were manned by two workers: one for loading the undebarked posts and adjusting the machine during work, and the other for unloading the debarked posts and moving them to the appropriate stacks. Unloading was always manual, since no unloading deck was available. Sorting generally occurred during unloading, and consisted of placing the posts into different piles according to their characteristics. Debarked posts could be placed horizontally in stacks built on the yard floor (operations A, B, and D), or vertically against a wall (operations C, E, and F). In the latter case, the operator would not need to bend, as otherwise necessary when building a stack of horizontally placed posts.
Data collection took place in the period between the Winter of 2016 and the Spring of 2017. During that period, researchers visited each operation to record post debarking operations with two 12 megapixel digital cameras mounted on tripods, in order to simultaneously collect video data for both operators. Cameras were positioned to capture images of the entire body of each worker during the debarking cycle. The data pool consisted of 12 video files, as many as the operators surveyed in the study. Each video recording was at least 15 min in duration, and it captured at least 25 debarking cycles. Each loading and unloading cycle was subdivided into specific tasks, in order to determine if some tasks incurred a higher postural risk than the others, which could be used by machine manufacturers when designing new machine models (
Table 2). Machine delays and rest breaks were excluded from the analysis.
Once in the laboratory, still frames were extracted from the video footage in the number of 100 stills for each worker and operation. Frame extraction was conducted at random intervals, whose duration averaged 30 s [
10]. Random number tables were generated in order to assist with the sampling and avoid the risk of accidental synchronization between observation intervals and cyclic tasks [
11]. The total number of videotape frames analyzed in this study was 1200, that is 100 stills × 12 workers.
Operator postures on the still frames were attributed a postural risk index using the Ovako Working posture Analysis System (OWAS). Postural risk assessment can also be conducted with other methods, such as the Rapid Upper Limb Assessment (RULA) and the Rapid Entire Body Assessment (REBA). RULA offers additional information on wrist and elbow postures, which are not included within OWAS. However, RULA was developed for sedentary work and neglects lower body postures, whereas REBA was developed for the health care service and is less suitable for industrial work compared with OWAS [
12]. In contrast, the OWAS method covers both the upper and lower body, and is relatively simple to apply [
13]. Furthermore, OWAS is among the most widespread methods used to assess postural risk, which facilitates the comparison of study results with the data reported in the available literature on the subject [
14]. The OWAS method is highly reliable [
15] and it has been shown to match or surpass the performance of other newer and more detailed postural assessment methods [
16].
Frame analysis was conducted using the ErgoFellow 2.0 software, developed by FBF SISTEMAS (Belo Horizonte, MG, Brazil). Using the interactive program interface, each frame was analyzed and classified according to the OWAS method, so that the software could return an Action Category (AC) score, indicating whether corrective action was necessary and how urgent it was. In particular, the OWAS method adopts four Action Categories, as follows: AC1 = Normal posture, no intervention required; AC2 = Slightly harmful posture, corrective action should be taken during the next regular review of work methods; AC3 = Distinctly harmful posture, corrective action should be taken as soon as possible; AC4 = Extremely harmful posture, corrective action should be taken immediately (i.e., right now!). The OWAS system attributes AC scores for each of the 252 combinations derived from three arm postures, four trunk postures, seven lower body postures, and three load weight classes. AC scores are based on a specific grid, developed by sector experts
Each frame was classified as one of the previously described work tasks in post debarking, which allowed us to determine whether specific task types involved a higher postural risk compared to the others.
Each work station, operation type, and task was also attributed an overall postural risk index (PRI), calculated as the frequency-weighted average of the AC scores recorded for that specific case, according to the equation below [
17]:
where a, b, c, and d are the frequency of scores AC 1, 2, 3, and 4, respectively, represented as the percentage of total observations attributed a given score.
Data were analyzed with the Minitab 16 advanced statistics software (State College, PA, USA). Given the ordinal character of all variables, the statistical significance of the eventual differences between the AC scores for different operations, work stations, and work steps was checked with Pearson’s chi-square (χ2) test for sampling distributions. The elected significance level was α < 0.05.
3. Results
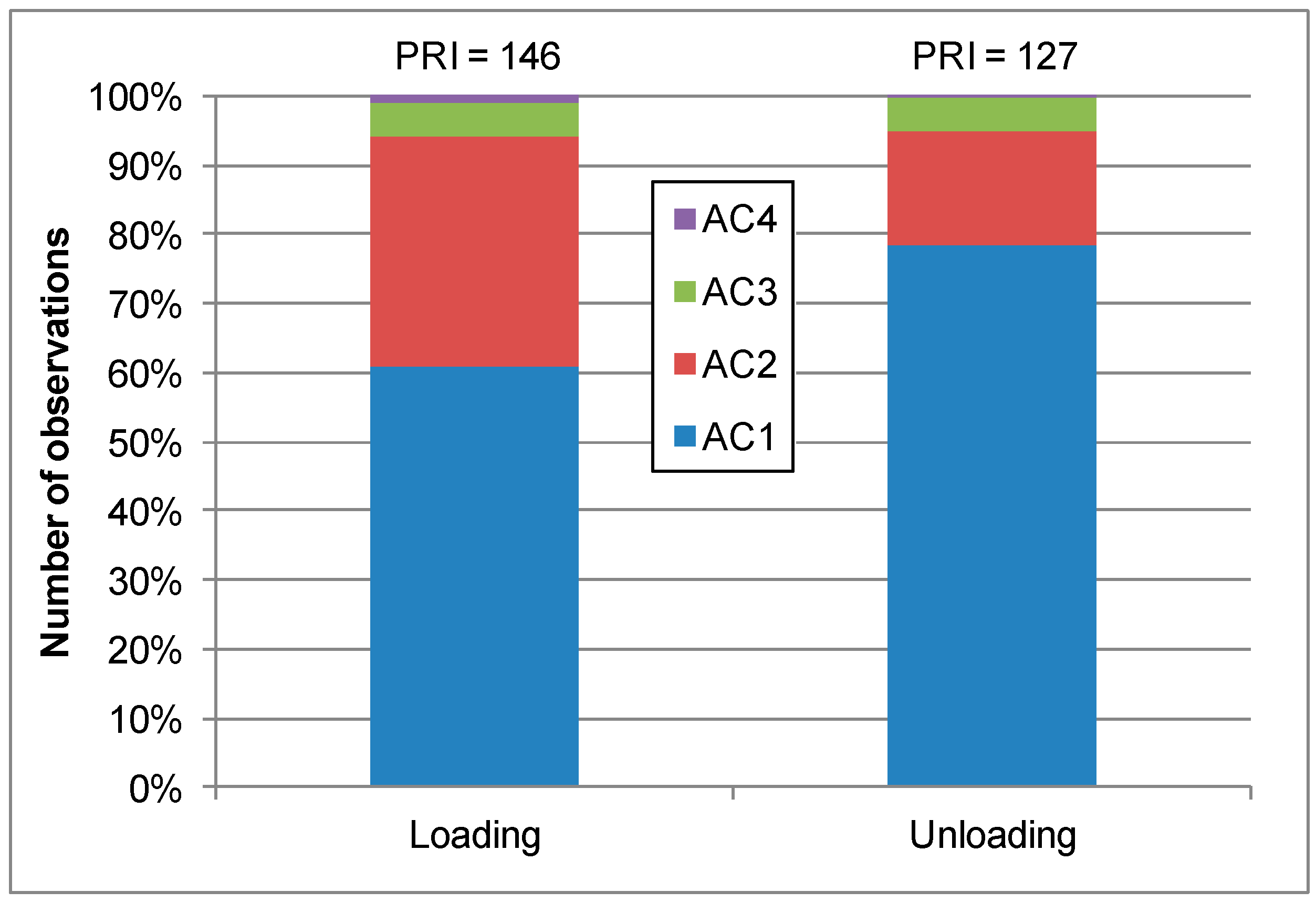
The mean postural risk index for post debarking was 136, or 146 and 129 for the loading and unloading station, respectively. Loading incurred a higher postural risk than unloading, with twice as many observations in the AC2 class, compared with the general distribution (
Figure 2). This distribution “anomaly” offered the largest contribution (70%) to the overall χ
2 score for the comparison of distributions, which was highly significant (
p < 0.001).
Overall, operations F and D performed the best, recording the lowest postural risk index for the whole group: 114 and 129, respectively (
Table 3). In contrast, operation C raised the highest concern, with a postural risk index of 150. Differences were caused by a consistent drift of postural scores from AC1 to AC2, which turned out to be highly significant (
p < 0.001) and contributed 80% to the overall χ
2 score.
Postural analysis of different work tasks showed that the highest risk was incurred when carrying the undebarked posts to the machine infeed chute, when pushing them on the chute and towards the debarker disk, and when holding the post during debarking (
Table 4). Carrying the debarked posts to the stacks also incurred a high postural risk, confirming that “carry” type tasks are inherently hazardous due to the handling of relatively heavy objects (10–20 kg apiece) that may force workers to adopt awkward postures. In contrast, the lowest postural risk was encountered with obviously neutral tasks, as waiting at rest and walking with no load, when operators were most likely to assume physiological postures. Distribution “anomalies” for these tasks explained most (85%) of the overall χ
2 score for the comparison of distributions, which was highly significant (
p < 0.001).
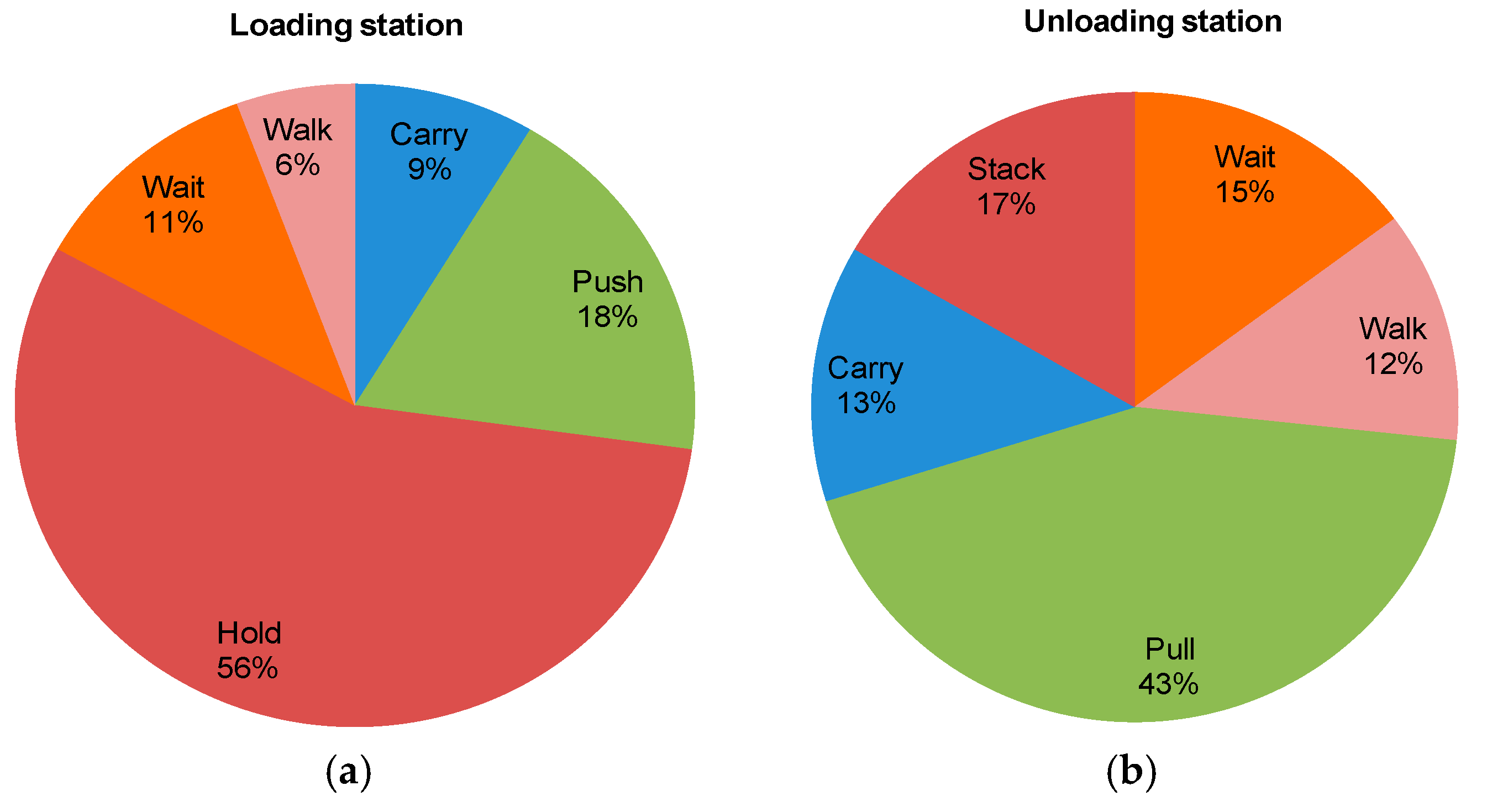
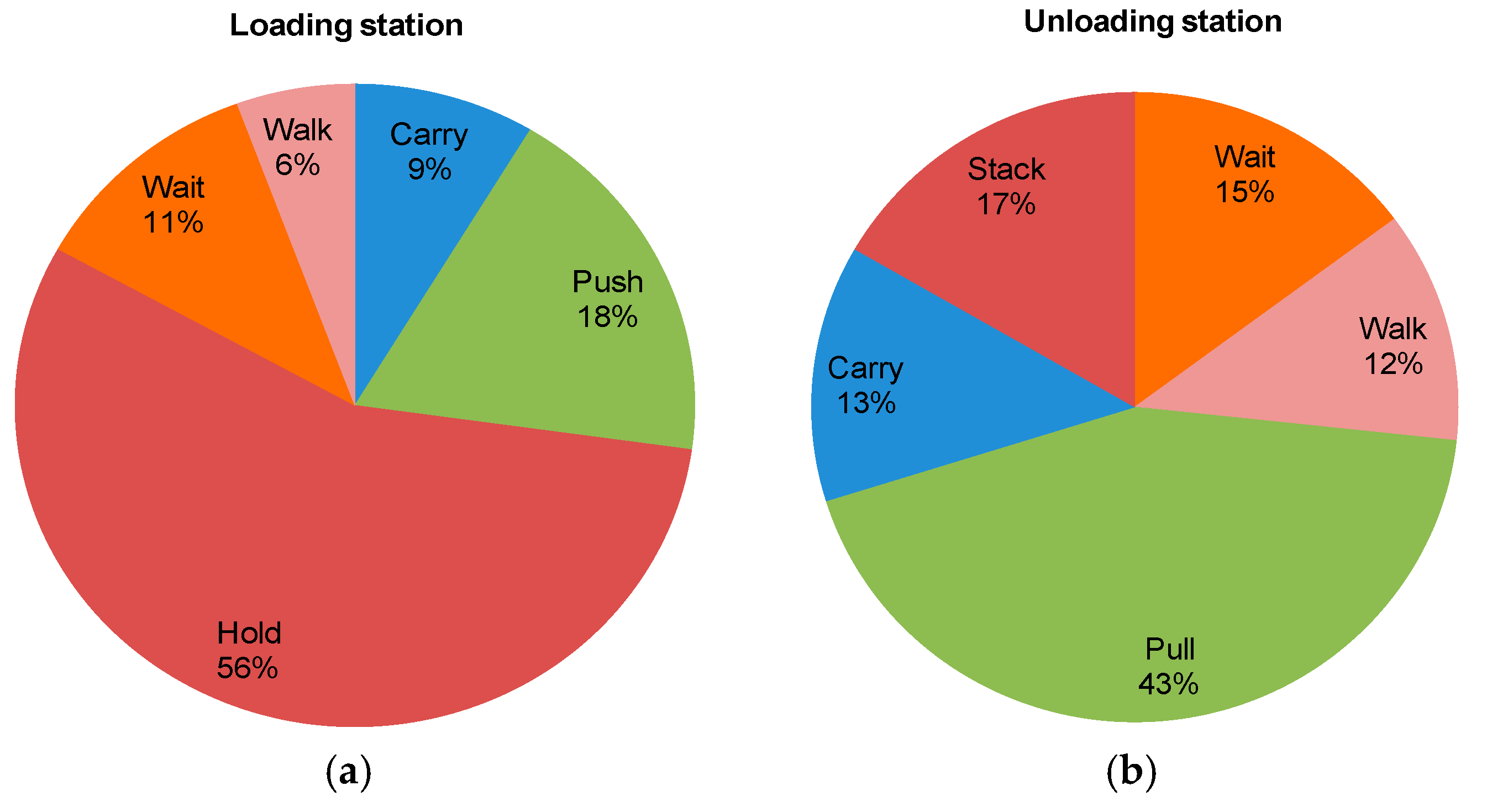
A better appreciation of postural risk and of the mechanisms leading to given PRI scores was obtained by intersecting the postural risk index characterizing specific tasks with the incidence of these tasks over total cycle time. Taken together, the three tasks with the highest PRI (“carry”, “push” and “hold”) accounted for 83% of the loading cycle (
Figure 3). Apparently, the loading cycle was divided between relatively risky and markedly neutral tasks (“walk” and “wait”), showing a somewhat polarized structure (i.e., high risk vs. no risk at all).
The situation was better for the unloading cycle. First, neutral tasks were more frequent in the unloading cycle than in the loading cycle (27% vs. 13%), which was bound to reduce the overall postural risk of the unloading station. Second, over 40% of the unloading cycle was occupied by pulling the post from the outfeed chute (i.e., “pull”), which only incurred a moderate postural risk.
The effect of deck type was tested by comparing the postural risk index and the task frequency distribution of operations with and without a deck. In order to have a balanced dataset, the two operations without a deck were matched with two operations extracted from the larger pool of those that were fitted with a deck. Eventually, operations A, B, C, and D were selected for the comparison because they all used the same Rabaud Robopel 250 machine model.
Deck-fitted operations incurred a lower postural risk, and were characterized by a mean PRI of 144, versus 158 for the two operations that were not fitted with a deck. However, individual variations were high and the general difference between the two set ups (deck vs. no deck) was not significant (
p = 0.228). In contrast, significant differences were found for both task distribution and postural risk between individual operations, and the worst performer was one of the two operations that were not fitted with a deck (Operation C). Yet, the next-worst was a deck-fitted operation (Operation D), which blurred the general picture. Both operations C and D were characterized by a very low incidence of neutral tasks (i.e., “wait” and “walk”), which may hint at a direct relationship between postural risk and how busy operators are (
Table 5).
Similarly, the postural risk incurred at the unloading station was affected by how the debarked posts are arranged, i.e., horizontally on the floor or vertically against a wall. The analysis showed that the postural risk incurred by the two options was about the same (
Table 6). However, the incidence of a neutral task was twice as high for the horizontal technique, compared with the vertical one, hinting at a somewhat more laborious routine for vertical stacking.
4. Discussion
The postural risk incurred during post debarking is relatively low. The worst case is represented by operation C and obtains a PRI of 150, which is much below that reported for material handling at factories (PRI = 236) [
18] and for forest work (PRI = 250 ÷ 300) [
17,
19]. The best performers (operations B, D, and F) incur a lower musculo-skeletal risk than light manual packing work (PRI = 136) [
20], and are basically safe. As far as small-scale forest operations are concerned, post debarking is characterized by a lower postural risk compared with traditional firewood processing work, which is the other activity typically endeavored by small-scale operators to increase the value of their products [
21].
In fact, there are large differences between operations, which are difficult to explain. Neither the availability of a deck, nor the stacking technique, seem to have a univocal effect on postural risk. While it is true that the worst performer is not equipped with a loading deck, it is also true that the only other operation without a loading deck performs quite well and is actually second best (operation B). As for the stacking technique, there are indeed differences in task frequency between the horizontal and vertical stacking techniques, but these differences do not seem to affect postural risk.
Therefore, one must look for additional factors that may explain the differences between individual operations. These might be found in the specific characteristics of stacks and decks, such as their height, their exact position in the yard, and their distance from the machine. As for height, that may explain the good performance of operation B, which was not fitted with a loading deck but featured stacks that were replenished regularly, so as to remain near to the infeed chute and to stay always more or less at waist height. This way, the worker at the loading station did not need to bend over for picking posts off the floor, nor did he have to carry these posts to the infeed chute over any extended distance. On that note, it is important to stress that stack placement would likely impact the incidence of high-risk tasks such as “carry”, and could be effectively manipulated in order to relieve postural risk.
Furthermore, one may speculate about the effect of the anthropometric characteristics of the workers. Simple machines like the debarkers observed in this study are relatively inflexible, and their structure only allows for minimal adjustments. Therefore, the same machine might be easier to negotiate for workers with specific anthropometric characteristics, and more difficult for other ones who are too tall or too short to work comfortably under a fixed infeed height setting, for instance. As a matter of fact, the workers at operation C—the worst performer—were especially tall, which may have forced them to assume unnatural body positions during some specific tasks.
Finally, it is possible that some of the differences between individual operations were related to training. While they were generally experienced, none of the workers in the study had received specific formal training, but they had all been taught on the job by older workers, as often occurs with small-scale part-time operations. Unfortunately, informal on-the-job training does not develop according to a set curriculum, but is based on the real-world experience of the older workers, which might be quite valid in some fields, but weak in others. Therefore, one may imagine that some workers had reached a better grasp of kinesiology than others, and therefore would use a more suitable work technique. Unfortunately, the study did not determine operator anthropometrics and training history, and therefore all these considerations cannot be substantiated by numbers, although they remain highly suggestive.
However, the study determined with some certainty the mean postural risk, as well as the specific postural risk, associated with individual tasks and specific work stations.
While mean postural risk has already been addressed in the opening of this section, here, one needs to make a specific remark on context. The mean postural risk figures reported in this study are valid for the operation of the debarker, but they do not include all ancillary operations that are part of post debarking duties. In particular, the study excluded any postures the operators assumed during delays. These delays easily represent 30% of the total worksite time [
5], and generally consist of rest pauses or brief interruptions when moving away the processed product, or restocking the deck with new logs. During this time, workers are sedentary and they seldom perform any heavy physical activity, which is bound to reduce the overall postural risk.
In turn, that draws attention to the meaning of neutral tasks such as “wait” and “walk”, and to their relation with productivity. In particular, “wait” implies inactivity, and the association of this task with a low postural risk may lead one to infer that postural risk increases with efficiency. In fact, classic delays that lead to inefficiency were excluded from the postural risk analysis, and therefore the tasks that do not describe a direct action on the machine or the work object are not necessarily implying an interruption of the production cycle. In fact, they simply indicate that the machine is producing without requiring a direct action from the worker, who might then be waiting until his intervention is again required. Similarly, walking to the machine or to the stacks occurs while the machine is engaging in its work, and does not imply any interruptions of the work cycle. Therefore, a higher frequency of “waiting” may simply describe an operation that is better organized and where the machine can work for a longer time without requiring direct worker action. That is clearly demonstrated by the absence of any meaningful correlation between productivity and PRI for the sample operations (R2 = 0.0049).
At the same time, the association between specific tasks and postural risk offers some useful insights. The high risk associated with “carry” is expected, because moving around heavy objects is bound to involve some postural risk [
22]. Less expected and more useful is the information about the high postural risk entailed by such tasks as “push” and “hold”. Theoretically, these should be relatively easy tasks, as the post is supported by the debarker infeed chute. Yet, the study indicates that these tasks carry a significant postural risk, hinting at imperfect machine design. As a matter of fact, the infeed chute of small-scale debarkers is somewhat rudimentary and its architecture could be improved. Study results point to the need for an easily adjustable infeed chute, possibly equipped with a simple belt to assist with moving the post into the working mechanism, as available even on the cheapest firewood processors [
23]. These features would certainly relieve worker effort and decrease the risk for WMSD.
Finally, the study offers compelling evidence for the different postural risk incurred at the two different work stations, stressing once more the importance of job rotation, which is made especially easy by the elementary skills required for manning both stations.
5. Conclusions
Post debarking involves a moderate postural risk, which is different for the two main work stations and varies with individual operations, based on their specific set up. However, debarker design could be improved, especially for what concerns the loading station, which is still too basic. Better machine design should be part of a more articulate strategy aimed at decreasing the postural risk of post debarking work sites. Future studies should also investigate the relationship between postural risk and worker anthropometrics, under the conditions of the current machine design with its rather inflexible settings, and possibly after developing improved designs that can be adjusted to fit operators with different anthropometric characteristics.





{kind=link}
{kind=link}
{kind=link}