A Robust Productivity Model for Grapple Yarding in Fast-Growing Tree Plantations



Abstract
:1. Introduction
2. Materials and Methods
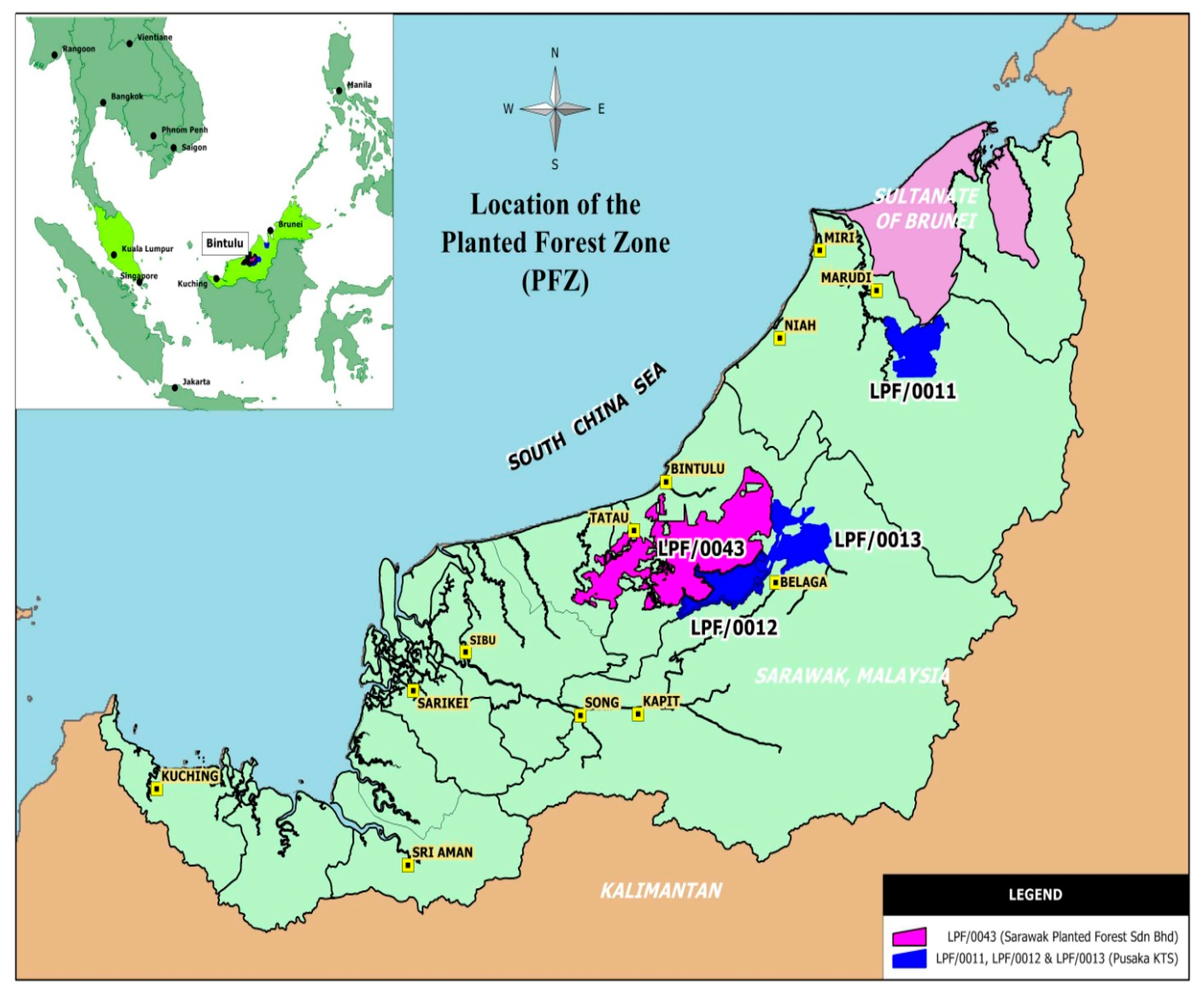
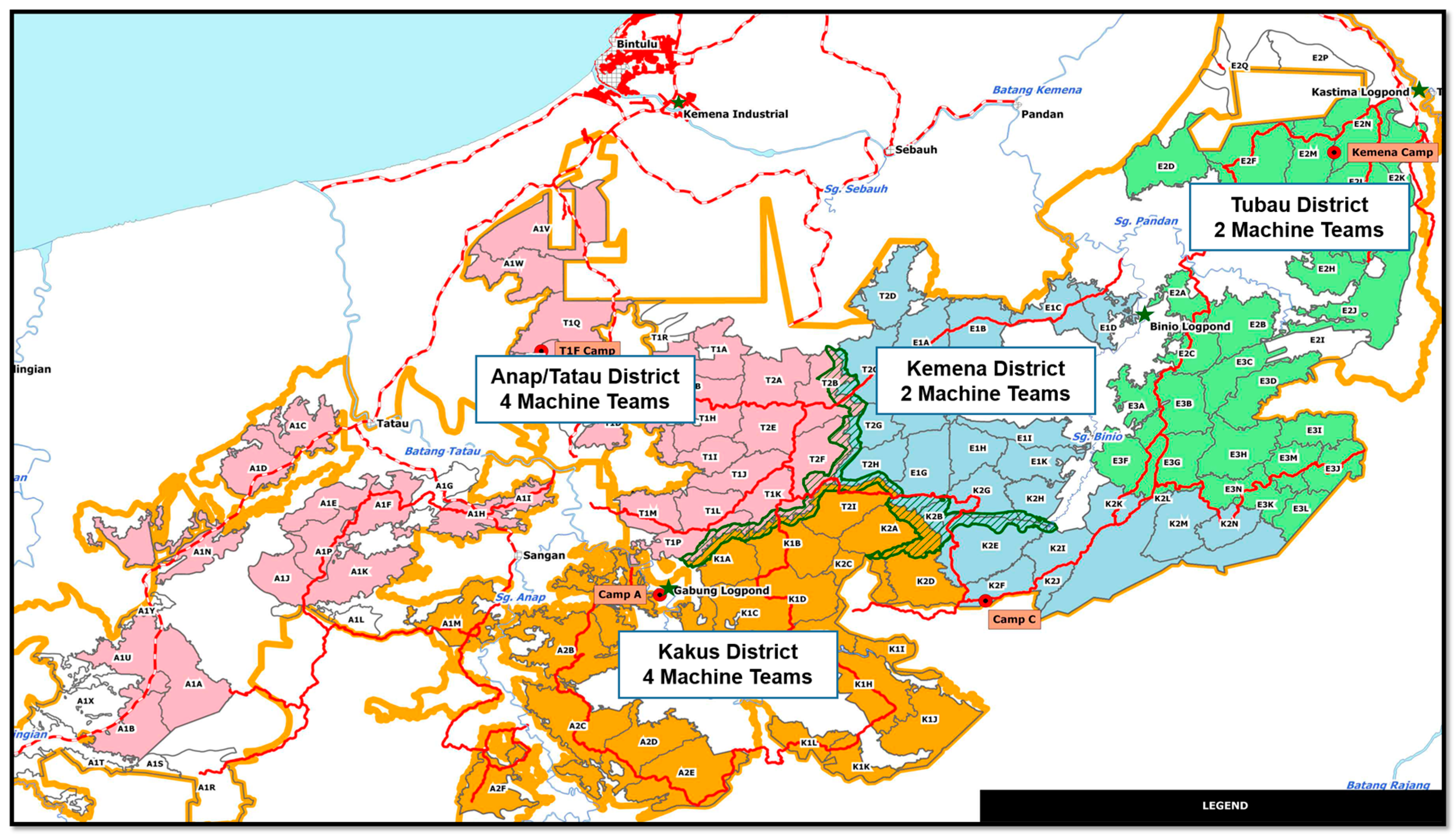
2.1. Site and Equipment
2.2. Data Collection
2.3. Data Analysis
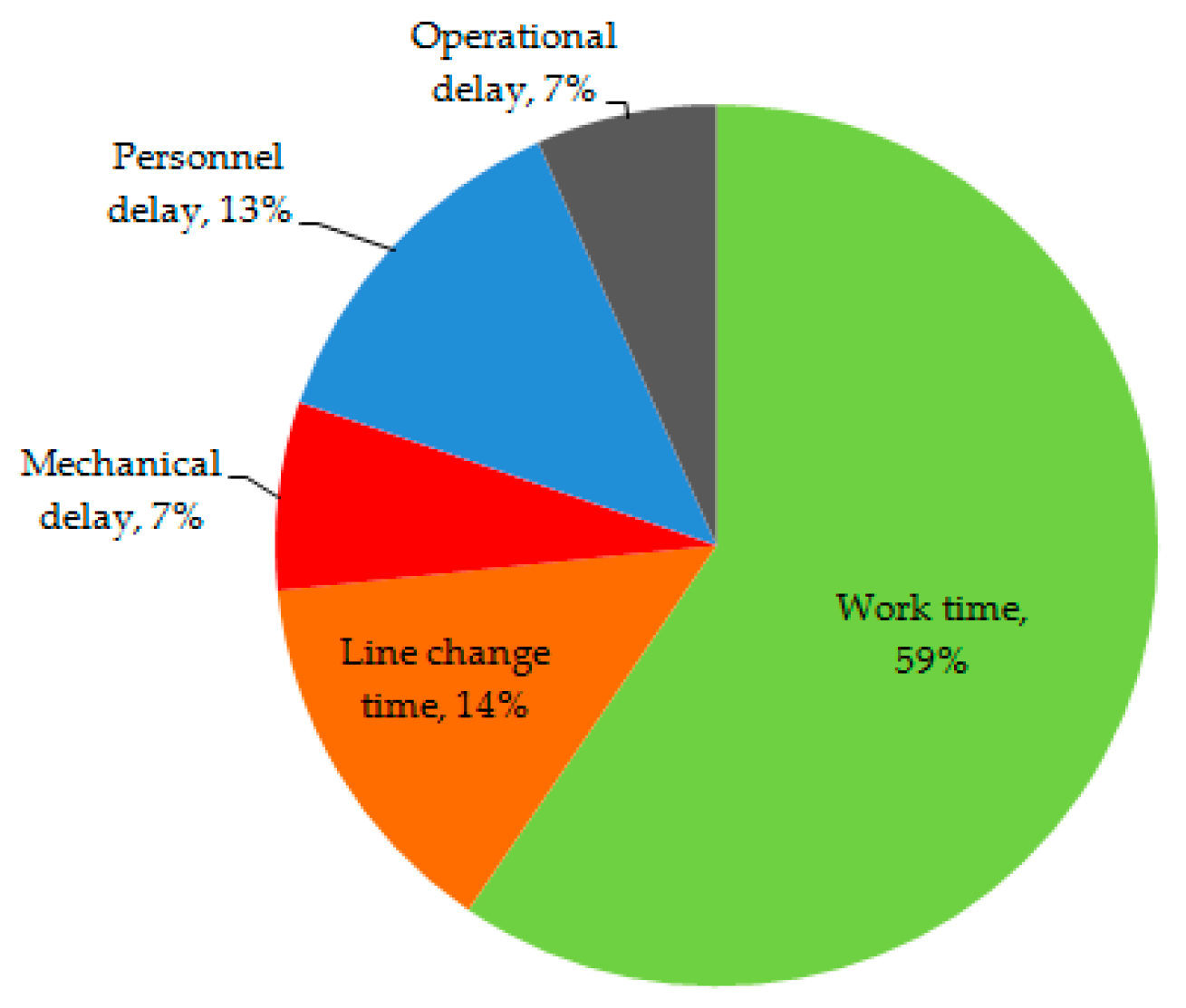
3. Results
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Campinhos, E., Jr. Sustainable plantations of high-yield shape Eucalyptus trees for production of fiber: The Aracruz case. New For. 1999, 17, 129–143. [Google Scholar] [CrossRef]
- Stape, J.; Binkley, D.; Ryan, M.; Fonseca, S.; Loos, R.; Takahashi, E.; Silva, C.; Silva, S.; Hakamada, R.; Ferreira, J.; et al. The Brazil Eucalyptus Potential Productivity Project: Influence of water, nutrients and stand uniformity on wood production. For. Ecol. Manag. 2010, 259, 1684–1694. [Google Scholar] [CrossRef]
- Siry, J.; Cubbage, F.; Ahmed, M. Sustainable forest management: Global trends and opportunities. For. Policy Econ. 2005, 7, 551–561. [Google Scholar] [CrossRef]
- Lonnstedt, L.; Sedjo, R. Forestland ownership changes in the United States and Sweden. For. Policy Econ. 2012, 14, 19–27. [Google Scholar] [CrossRef]
- Laaksonen-Craig, S. Foreign direct investment in the forest sector: Implications for sustainable forest management in developed and developing countries. For. Policy Econ. 2004, 6, 359–370. [Google Scholar] [CrossRef]
- Sedjo, R. The potential of high-yield plantation forestry for meeting timber needs. New For. 1999, 17, 339–360. [Google Scholar] [CrossRef]
- Food and Agriculture Organization (FAO). Global Forest Resources Assessment 2015. Available online: http://www.fao.org/3/a-i4793e.pdf (accessed on 16 October 2017).
- Ragauskas, A.; Williams, C.; Davison, B.; Britovsek, G.; Cairney, J.; Eckert, C.; Frederick, W., Jr.; Hallett, J.; Leak, D.; Liotta, C.; et al. The path forward for biofuels and biomaterials. Science 2006, 311, 484–489. [Google Scholar] [CrossRef] [PubMed]
- Sohngen, B.; Mendelsohn, R.; Sedjo, R. Forest management, conservation, and global timber markets. Am. J. Agric. Econ. 1999, 81, 1–13. [Google Scholar] [CrossRef]
- Bremer, L.; Farley, A. Does plantation forestry restore biodiversity or create green deserts? A synthesis of the effects of land-use transitions on plant species richness. Biodivers. Conserv. 2010, 19, 3893–3915. [Google Scholar] [CrossRef]
- Berndes, G.; Hoogwijk, M.; Van den Broek, R. The contribution of biomass in the future global energy supply: A review of 17 studies. Biomass Bioenergy 2003, 25, 1–28. [Google Scholar] [CrossRef]
- Charnley, S. Industrial plantation forestry. Do local communities benefit? J. Sustain. For. 2005, 21, 35–57. [Google Scholar] [CrossRef]
- Paul, K.; Reeson, A.; Polglase, P.; Ritson, P. Economic and employment implications of a carbon market for industrial plantation forestry. Land Use Policy 2013, 30, 528–540. [Google Scholar] [CrossRef]
- Landry, J.; Chirwa, P. Analysis of the potential socio-economic impact of establishing plantation forestry on rural communities in Sanga district, Niassa province, Mozambique. Land Use Policy 2011, 28, 542–551. [Google Scholar] [CrossRef]
- Machado, R.; Conceição, S.; Leite, H.; de Souza, A.; Wolff, E. Evaluation of forest growth and carbon stock in forestry projects by system dynamics. J. Clean. Prod. 2015, 96, 520–530. [Google Scholar] [CrossRef]
- Rochedo, P.; Costa, I.; Império, M.; Hoffmann, B.; Merschmann, P.; Oliveira, C.; Szklo, A.; Schaeffer, R. Carbon capture potential and costs in Brazil. J. Clean. Prod. 2016, 131, 280–295. [Google Scholar] [CrossRef]
- Food and Agriculture Organization (FAO). Responsible Management of Planted Forests: Voluntary Guidelines. Available online: http://www.fao.org/docrep/009/j9256e/J9256E03.htm (accessed on 16 October 2017).
- Spinelli, R.; Magagnotti, N. The effects of introducing modern technology on the financial, labour and energy performance of forest operations in the Italian Alps. For. Policy Econ. 2011, 13, 520–524. [Google Scholar] [CrossRef]
- Visser, R.; Stampfer, K. Expanding ground-based harvesting onto steep terrain: A review. Croat. J. For. Eng. 2015, 36, 321–331. [Google Scholar]
- Visser, R.; Berkett, H. Effect of terrain steepness on machine slope when harvesting. Int. J. For. Eng. 2015, 26, 1–9. [Google Scholar] [CrossRef]
- Food and Agriculture Organization (FAO). Logging and Transport in Steep Terrain. Available online: http://www.fao.org/docrep/016/ap015e/ap015e00.pdf (accessed on 16 October 2017).
- Montorselli, N.; Lombardini, C.; Magagnotti, N.; Marchi, E.; Neri, F.; Picchi, G.; Spinelli, R. Relating safety, productivity and company type for motor-manual logging operations in the Italian Alps. Accid. Anal. Prev. 2010, 42, 2013–2017. [Google Scholar] [CrossRef] [PubMed]
- Pinard, M.; Barker, M.; Tay, J. Soil disturbance and post-logging forest recovery on bulldozer paths in Sabah, Malaysia. For. Ecol. Manag. 2000, 130, 213–225. [Google Scholar] [CrossRef]
- Nahuelhual, L.; Carmona, A.; Lara, A.; Echeverría, C.; González, M. Land-cover change to forest plantations: Proximate causes and implications for the landscape in south-central Chile. Landsc. Urban Plan. 2012, 107, 12–20. [Google Scholar] [CrossRef]
- Raymond, K. Innovation to increase profitability of steep terrain harvesting in New Zealand. N. Z. J. For. 2012, 57, 19–23. [Google Scholar]
- Spinelli, R.; Visser, R.; Riond, C.; Magagnotti, N. A survey of logging contract rates in the southern European Alps. Small-Scale For. 2017, 16, 179–193. [Google Scholar] [CrossRef]
- FPInnovations Steep Slope Harvesting Initiative. Available online: http://www.coastforest.org/fpinnovations-steep-slope-harvesting-initiative/ (accessed on 13 October 2017).
- WorkSafe, B.C. Grapple Yarder and Supersnorkel Handbook; Workers’ Compensation Board: Richmond, BC, Canada, 1992; 196p.
- Howard, A. Production equations for grapple yarding in Coastal British Columbia. West. J. Appl. For. 1991, 6, 7–10. [Google Scholar]
- Studier, D.; Binkley, V. Cable Logging Systems. Division of Timber Management; USDA Forest Service: Portland, OR, USA, 1974; 190p.
- De Souza, A. A Study of Production and Ergonomic Factors in Grapple Yarding Operations Using an Electronic Data Logger System. Ph.D. Thesis, University of British Columbia, Vancouver, BC, Canada, 1983; 231p. [Google Scholar]
- Helton, J. A Comparison of Grapple Yarding and Choker Yarding in British Columbia. Master’s Thesis, University of New Brunswick, Fredericton, NB, Canada, 1985; 88p. [Google Scholar]
- Acuna, M.; Skinnell, J.; Evanson, T.; Mitchell, R. Bunching with a self-levelling feller-buncher on steep terrain for efficient yarder extraction. Croat. J. For. Eng. 2011, 32, 521–531. [Google Scholar]
- Amishev, D.; Evanson, T. Innovative methods for steep terrain harvesting. In Proceedings of the FORMEC 2010 Conference “Forest Engineering: Meeting the Needs of the Society and the Environment”, Padova, Italy, 11–14 July 2010. [Google Scholar]
- Visser, R.; Raymond, K.; Harrill, H. Mechanizing steep terrain harvesting operations. N. Z. J. For. 2014, 59, 3–8. [Google Scholar] [CrossRef]
- Cavalli, R. Prospects of research on cable logging in forest engineering community. Croat. J. For. Eng. 2012, 33, 339–356. [Google Scholar]
- Chua, A. More forest plantations. Sarawak Tribune, 2 December 1996. [Google Scholar]
- Pinard, M.; Putz, F.; Tay, J.; Sullivan, T. Creating timber harvesting guidelines for a reduced-impact logging project in Malaysia. J. For. 1995, 93, 41–45. [Google Scholar]
- Hoffmann, S.; Jaeger, D.; Lingenfelder, M.; Schoenherr, S. Analyzing the efficiency of start-up cable yarding crew in southern china under new forest management perspectives. Forests 2016, 7, 33. [Google Scholar] [CrossRef]
- Alpass, P. Alpine shovel yarders go international. S. Afr. For. Mag. 2010, 10, 14–15. [Google Scholar]
- Torgersen, H.; Lisland, T. Excavator-based cable logging and processing system: A Norwegian case study. Int. J. For. Eng. 2002, 13, 11–16. [Google Scholar]
- Devlin, G.; Klvač, R. How technology can improve the efficiency of excavator-base cable harvesting for potential biomass extraction—A woody productivity resource and cost analysis for Ireland. Energies 2014, 7, 8374–8395. [Google Scholar] [CrossRef]
- Talbot, B.; Ottaviani-Aalmo, G.; Stampfer, K. Productivity analysis of an un-guyed integrated yarder-processor with running skyline. Croat. J. For. Eng. 2014, 35, 201–210. [Google Scholar]
- Talbot, B.; Stampfer, K.; Visser, R. Machine function integration and its effect on the performance of a timber yarding and processing operation. Biosyst. Eng. 2015, 135, 10–20. [Google Scholar] [CrossRef]
- Sappington, J.; Longshore, K.; Thompson, D. Quantifying landscape ruggedness for animal habitat analysis: A case study using bighorn sheep in the Mojave Desert. J. Wildl. Manag. 2007, 71, 1419–1426. [Google Scholar] [CrossRef]
- Statistical Analysis System (SAS). StatView Reference; SAS Publishing: Cary, NC, USA, 1999; 528p. [Google Scholar]
- Olsen, E.; Hossain, M.; Miller, M. Statistical Comparison of Methods Used in Harvesting Work Studies; Oregon State University, Forest Research Laboratory: Corvallis, OR, USA, 1998; 31p. [Google Scholar]
- Howard, A. Validating forest harvesting production equations. Trans. ASAE 1992, 35, 1683–1687. [Google Scholar] [CrossRef]
- Adebayo, A.; Han, H.S.; Johnson, L. Productivity and cost of cut-to-length and whole-tree harvesting in a mixed-conifer stand. For. Prod. J. 2007, 57, 59–69. [Google Scholar]
- Spinelli, R.; Hartsough, B.; Magagnotti, N. Productivity standards for harvesters and processors in Italy. For. Prod. J. 2010, 60, 226–235. [Google Scholar] [CrossRef]
- Payne, R. General balance, large data sets and extensions to unbalanced treatment structures. Comput. Stat. Data Anal. 2003, 44, 297–304. [Google Scholar] [CrossRef]
- Nuutinen, Y.; Väätäinen, K.; Heinonen, J.; Asikainen, A.; Röser, D. The accuracy of manually recorded time study data for harvester operation shown via simulator screen. Silv. Fenn. 2008, 42, 63–72. [Google Scholar] [CrossRef]
- Manner, J.; Nordfjell, T.; Lindroos, O. Automatic load level follow-up of forwarders’ fuel and time consumption. Int. J. For. Eng. 2016, 27, 151–160. [Google Scholar] [CrossRef]
- Holzleitner, F.; Kanzian, C.; Höller, N. Monitoring the chipping and transportation of wood fuels with a fleet management system. Silv. Fenn. 2013, 47, 11. [Google Scholar] [CrossRef]
- Spinelli, R.; Magagnotti, N.; Pari, L.; De Francesco, F. A comparison of tractor-trailer units and high-speed forwarders used in Alpine forestry. Scand. J. For. Res. 2015, 30, 470–477. [Google Scholar] [CrossRef]
- Spinelli, R.; Laina-Relaño, R.; Magagnotti, N.; Tolosana, E. Determining observer and method effects on the accuracy of elemental time studies in forest operations. Balt. For. 2013, 19, 301–306. [Google Scholar]
- Harstela, P. Work studies in forestry. Silv. Carelica 1991, 18, 41. [Google Scholar]
- Lindroos, O.; Cavalli, R. Cable yarding productivity models: A systematic review over the period 2000–2011. Int. J. For. Eng. 2016, 27, 79–94. [Google Scholar] [CrossRef]
- Eriksson, M.; Lindroos, O. Productivity of harvesters and forwarders in CTL operations in northern Sweden based on large follow-up datasets. Int. J. For. Eng. 2014, 25, 179–200. [Google Scholar] [CrossRef]
- Spinelli, R.; Ward, S.; Owende, P. A harvest and transport cost model for Eucalyptus spp. fast-growing short rotation plantations. Biomass Bioenergy 2009, 33, 1265–1270. [Google Scholar] [CrossRef]
- A mechanized swing yarder operation in New Zealand. Available online: http://fgr.nz/documents/download/4592 (accessed on 16 October 2017).
- Madill 122 Interlock swing yarder. Available online: http://fgr.nz/documents/download/4844 (accessed on 16 October 2017).
- Largo, S.; Han, H.S.; Johnson, L. Productivity and cost evaluation for non-guyline yarders in northern Idaho. In Proceedings of the COFE Conference “Machines and People: The Interface”, Hot Springs, AK, USA, 27–30 April 2004. [Google Scholar]
- Ovaskainen, H.; Uusitalo, J.; Väätäinen, K. Characteristics and significance of a harvester operator’s working technique in thinnings. Int. J. For. Eng. 2004, 15, 67–77. [Google Scholar]
- Kärhä, K.; Rönkö, E.; Gunne, S. Productivity and cutting costs of thinning harvesters. Int. J. For. Eng. 2004, 15, 43–55. [Google Scholar]
- Purfürst, T.; Lindroos, O. The correlation between long-term productivity and short-term performance ratings of harvester operators. Croat. J. For. Eng. 2011, 32, 509–519. [Google Scholar]
- Mola-Yudego, B.; Picchi, G.; Röser, D.; Spinelli, R. Assessing chipper productivity and operator effects in forest biomass operations. Silv. Fenn. 2010, 49, 14. [Google Scholar] [CrossRef]
- Raymond, K. Innovative harvesting solutions: A step change harvesting research programme. N. Z. J. For. 2010, 55, 4–9. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Operation | Type | Heavy | Medium |
|---|---|---|---|
| Teams | # | 1 to 7 | 8 to 12 |
| Base machine | Make | Kobelco | Doosan |
| Base machine | Model | SK330 | DX340 LCA |
| Base machine | kW | 209 | 184 |
| Winch | Make | Alpine | Alpine |
| Winch | Model | MDWS 12 | MDWS 10 |
| Mainline pull | kN | 120 | 100 |
| Mainline speed | m s−1 | 9.0 | 7.3 |
| Carriage | Make | Alpine | Alpine |
| Carriage | Model | Hydraulic | Hydraulic |
| Grapple open | mm | 1480 | 1900 |
| Grapple area | m2 | 1.71 | 3.48 |
| Mean per Shift | SD | Min | Max | ||
|---|---|---|---|---|---|
| Lines | # | 2.4 | 1.3 | 0 | 7 |
| Cycles | # | 97 | 43 | 12 | 233 |
| Delays | events | 2.8 | 4.4 | 0 | 36 |
| Mechanical delays | events | 0.4 | 0.7 | 0 | 5 |
| Personnel delays | events | 0.6 | 0.6 | 0 | 3 |
| Operational delays | events | 1.8 | 3.1 | 0 | 19 |
| Work time | h | 3.7 | 1.5 | 0.5 | 9.8 |
| Line change time | h | 0.9 | 1.2 | 0.0 | 6.6 |
| Delay time | h | 1.7 | 3.0 | 0.0 | 22.1 |
| Mechanical delays | h | 0.3 | 1.0 | 0.0 | 6.1 |
| Personnel delays | h | 0.9 | 0.9 | 0.0 | 3.7 |
| Operational delays | h | 0.5 | 0.7 | 0.0 | 7.0 |
| Production | m3 | 226 | 103 | 22 | 579 |
| Piece volume | m3 | 0.52 | 0.13 | 0.18 | 1.23 |
| Load size | pieces | 4.6 | 0.9 | 3.1 | 8.6 |
| Load volume | m3 | 2.4 | 0.6 | 1.1 | 4.5 |
| Yarding distance | m | 103 | 40 | 10 | 251 |
| Stacking distance | m | 20 | 12 | 10 | 60 |
| Productivity | m3 PMH−1 | 63 | 20 | 15 | 133 |
| Productivity | m3 SMH−1 | 39 | 17 | 8 | 117 |
| Team | Utilization | Cycles | Mechanical Delay | Personnel Delay | Operational Delay | Line Changes |
|---|---|---|---|---|---|---|
| # | % | n° | Events | Events | Events | Events |
| 1 | 58 b | 4144 | 18 | 23 | 55 | 101 |
| 2 | 60 b | 4315 | 24 | 22 | 132 | 26 |
| 3 | 63 b | 6465 | 26 | 24 | 41 | 53 |
| 4 | 62 b | 6028 | 30 | 43 | 95 | 57 |
| 5 | 68 b | 5205 | 14 | 38 | 41 | 67 |
| 6 | 60 b | 929 | 5 | 7 | 20 | 10 |
| 7 | 80 a | 5032 | 3 | 22 | 37 | 5 |
| 8 | 60 b | 8732 | 17 | 49 | 111 | 133 |
| 9 | 57 b | 5706 | 53 | 44 | 153 | 90 |
| 10 | 63 b | 3390 | 17 | 24 | 138 | 47 |
| 11 | 64 b | 2497 | 13 | 26 | 96 | 11 |
| 12 | 57 b | 1425 | 9 | 10 | 40 | 12 |
| Medium Yarder | Heavy Yarder | p-Value | Test | ||||
|---|---|---|---|---|---|---|---|
| Mean | SD | Mean | SD | ||||
| Piece volume | m3 | 0.47 | 0.11 | 0.55 | 0.13 | <0.0001 | t-test |
| Load size | pieces | 5.6 | 0.9 | 4.2 | 0.5 | <0.0001 | MW |
| Load volume | m3 | 2.61 | 0.59 | 2.28 | 0.59 | <0.0001 | t-test |
| Yarding distance | m | 123 | 48 | 93 | 30 | <0.0001 | MW |
| Stacking distance | m | 22 | 12 | 24 | 8 | 0.0005 | MW |
| Work time | h shift−1 | 3.42 | 1.41 | 3.87 | 1.57 | 0.0011 | t-test |
| Total time | h shift−1 | 6.13 | 2.48 | 6.42 | 2.41 | 0.0495 | MW |
| Utilization | % | 60.1 | 29.1 | 64.1 | 33.0 | 0.0065 | MW |
| Delay time | % | 27.4 | 21.5 | 23.9 | 17.1 | 0.1317 | MW |
| Line change time | % | 12.4 | 17.0 | 12.0 | 14.7 | 0.2427 | MW |
| Line change time | h line−1 | 1.16 | 1.18 | 0.78 | 0.83 | 0.0016 | MW |
| Delay events | # shift−1 | 3.4 | 3.0 | 2.4 | 2.0 | 0.0005 | MW |
| Delay events | h event−1 | 0.67 | 0.65 | 0.91 | 0.75 | <0.0001 | MW |
| Productivity | m3 PMH−1 | 56 | 18 | 66 | 21 | <0.0001 | MW |
| Productivity | m3 SMH−1 | 33 | 15 | 42 | 17 | <0.0001 | MW |
| P = a + b Vol + c N° + d Line + e Stack + f Medium Vol + g Top Vol + h Top | ||||
|---|---|---|---|---|
| Adjusted R2 = 0.501; n = 42,927; F = 6157.6; p < 0.0001 | ||||
| Coeff | SE | t-Value | p-Value | |
| a | −50.515 | 1.163 | −43.4 | <0.0001 |
| b | 132.724 | 2.068 | 64.2 | <0.0001 |
| c | 14.222 | 0.108 | 131.6 | <0.0001 |
| d | −0.127 | 0.003 | −42.2 | <0.0001 |
| e | −0.124 | 0.012 | −10.3 | <0.0001 |
| f | −25.143 | 0.778 | −32.3 | <0.0001 |
| g | −36.148 | 2.662 | −13.6 | <0.0001 |
| h | 29.559 | 1.427 | 20.7 | <0.0001 |
| Yarder | Carriage | Line Length | Piece | Productivity | Operation | Country | Cycles | Reference |
|---|---|---|---|---|---|---|---|---|
| Type | Type | m | m3 | m3 PMH−1 | Type | n | ||
| Alpine MDWS | Grapple | 103 | 0.52 | 63 | Clearcut | Malaysia | 54,624 | this study |
| Madill 124 | Grapple | 100 | 0.81 | 58 | Clearcut | Australia | 184 | [33] |
| Thunderbird 6355 | Grapple | 160 | 0.85 | 86 | Clearcut | New Zealand | 123 | [34] |
| Thunderbird 255 | Slings | 233 | 1.52 | 39 | Clearcut | New Zealand | 165 | [61] |
| Madill 122 | Slings | 267 | 0.71 | 44 | Clearcut | USA | 70 | [62] |
| Timbco T425 | Slings | 80 | 0.55 | 15 | Thinning | USA | 218 | [63] |
| CAT 315 L | Slings | 80 | 1.43 | 30 | Thinning | USA | 237 | [63] |
| Doosan DX 210W | Slings | 120 | 0.28 | 11 | Clearcut | Norway | 149 | [44] |
| Modified JCB | Slings | 130 | 0.35 | 17 | Clearcut | Ireland | 90 | [42] |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Engelbrecht, R.; McEwan, A.; Spinelli, R. A Robust Productivity Model for Grapple Yarding in Fast-Growing Tree Plantations. Forests 2017, 8, 396. https://doi.org/10.3390/f8100396
Engelbrecht R, McEwan A, Spinelli R. A Robust Productivity Model for Grapple Yarding in Fast-Growing Tree Plantations. Forests. 2017; 8(10):396. https://doi.org/10.3390/f8100396
Chicago/Turabian StyleEngelbrecht, Riaan, Andrew McEwan, and Raffaele Spinelli. 2017. "A Robust Productivity Model for Grapple Yarding in Fast-Growing Tree Plantations" Forests 8, no. 10: 396. https://doi.org/10.3390/f8100396
APA StyleEngelbrecht, R., McEwan, A., & Spinelli, R. (2017). A Robust Productivity Model for Grapple Yarding in Fast-Growing Tree Plantations. Forests, 8(10), 396. https://doi.org/10.3390/f8100396