

Impact of Backpack LiDAR Scan Routes on Diameter at Breast Height Estimation in Forests
Abstract
1. Introduction
2. Materials and Methods
2.1. Overview of the Study Area
2.2. Data Acquisition
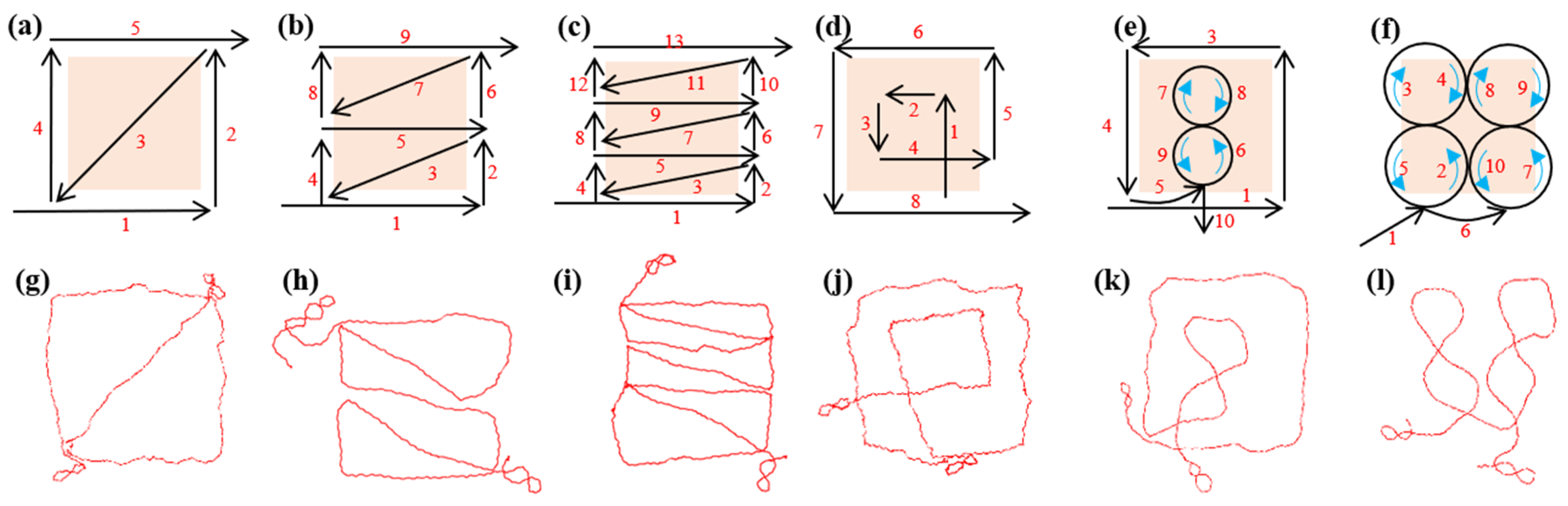
2.2.1. Backpack LiDAR Data Acquisition
2.2.2. Sample Plot Survey Data
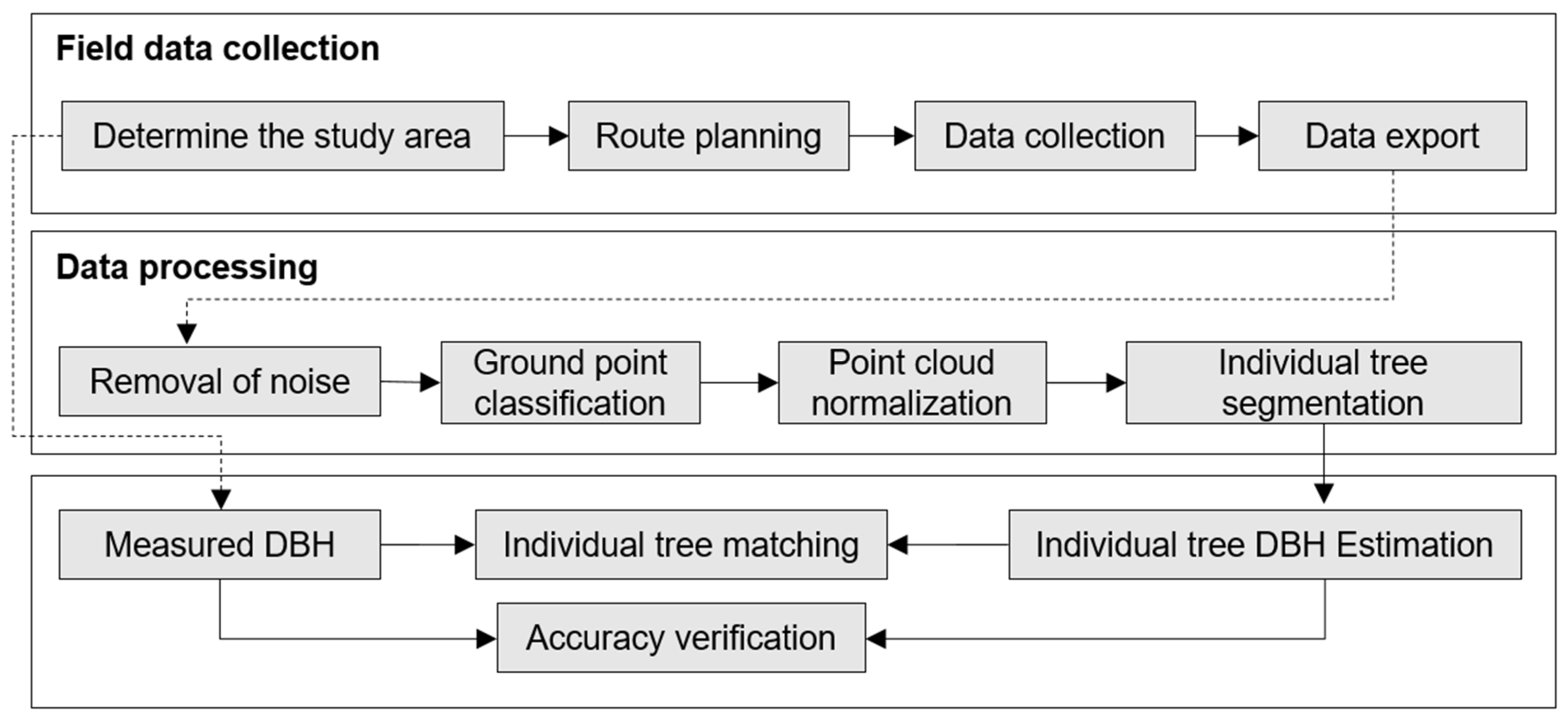
2.3. Research Methodology
2.3.1. Point Cloud Data Preprocessing
2.3.2. DBH Fitting
2.3.3. Accuracy Assessment
3. Results
3.1. Recognition Results and Analysis of Individual Trees from Point Clouds of Different Routes
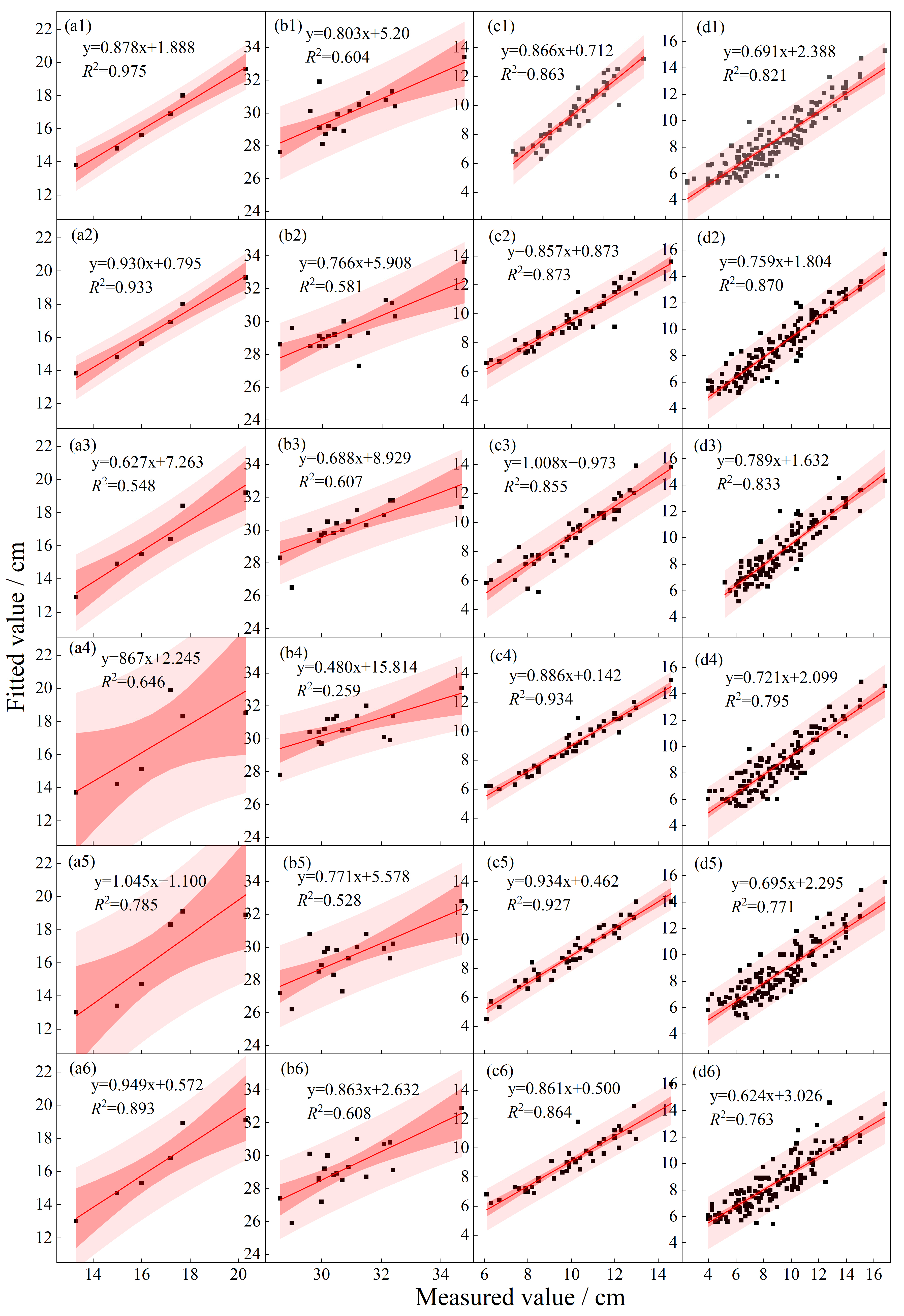
3.2. Analysis of the Estimation Precision of DBH for Different Routes
3.3. Correlation Analysis of Factors Affecting the Fitting Precision of DBH
4. Discussions
4.1. Influence of Tree Species Characteristics on the Results
4.2. Influence of Scanning Routes on the Results
4.3. Improvement of Data Processing Methods
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xiang, B.; Wielgosz, M.; Kontogianni, T.; Peters, T.; Puliti, S.; Astrup, R.; Schindler, K. Automated Forest Inventory: Analysis of High-Density Airborne LiDAR Point Clouds with 3D Deep Learning. Remote Sens. Environ. 2024, 305, 114078. [Google Scholar] [CrossRef]
- Zhao, Y.; Im, J.; Zhen, Z.; Zhao, Y. Towards accurate individual tree parameters estimation in dense forest: Optimized coarse-to-fine algorithms for registering UAV and terrestrial LiDAR data. Giscience Remote Sens. 2023, 60, 26. [Google Scholar] [CrossRef]
- Shoot, C.; Andersen, H.; Moskal, L.; Babcock, C.; Cook, B.; Morton, D. Classifying Forest Type in the National Forest Inventory Context with Airborne Hyperspectral and Lidar Data. Remote Sens. 2021, 13, 1863. [Google Scholar] [CrossRef]
- Zhang, Z.; Cao, L.; She, G. Estimating Forest Structural Parameters Using Canopy Metrics Derived from Airborne LiDAR Data in Subtropical Forests. Remote Sens. 2017, 9, 940. [Google Scholar] [CrossRef]
- Wood, C.M.; Bunce, R.G.H. Ecological survey of the native pinewoods of Scotland 1971. Earth Syst. Sci. Data 2016, 8, 177–189. [Google Scholar] [CrossRef]
- Tao, S.; Wu, F.; Guo, Q.; Wang, Y.; Li, W.; Xue, B.; Hu, X.; Li, P.; Tian, D.; Li, C.; et al. Segmenting Tree Crowns from Terrestrial and Mobile LiDAR Data by Exploring Ecological Theories. ISPRS J. Photogramm. Remote Sens. 2015, 110, 66–76. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, T.; Skidmore, A.K.; Cao, F.; She, G.; Cao, L. An Improved Area-Based Approach for Estimating Plot-Level Tree DBH from Airborne LiDAR Data. For. Ecosyst. 2023, 10, 100089. [Google Scholar] [CrossRef]
- Xiong, J.; Zeng, H.; Cai, G.; Li, Y.; Chen, J.M.; Miao, G. Crown Information Extraction and Annual Growth Estimation of a Chinese Fir Plantation Based on Unmanned Aerial Vehicle–Light Detection and Ranging. Remote Sens. 2023, 15, 3869. [Google Scholar] [CrossRef]
- Lu, J.; Wang, H.; Qin, S.; Cao, L.; Pu, R.; Li, G.; Sun, J. Estimation of aboveground biomass of Robinia pseudoacacia forest in the Yellow River Delta based on UAV and Backpack LiDAR point clouds. Int. J. Appl. Earth Obs. Geoinf. 2020, 86, 102014. [Google Scholar] [CrossRef]
- Deng, L.; Fu, B.; Wu, Y.; He, H.; Sun, W.; Jia, M.; Deng, T.; Fan, D. Comparison of 2D and 3D Vegetation Species Mapping in Three Natural Scenarios Using UAV-LiDAR Point Clouds and Improved Deep Learning Methods. Int. J. Appl. Earth Obs. Geoinf. 2023, 125, 103588. [Google Scholar] [CrossRef]
- Balestra, M.; Marselis, S.; Sankey, T.T.; Cabo, C.; Liang, X.; Mokroš, M.; Peng, X.; Singh, A.; Stereńczak, K.; Vega, C.; et al. LiDAR Data Fusion to Improve Forest Attribute Estimates: A Review. Curr. For. Rep. 2024, 10, 281–297. [Google Scholar] [CrossRef]
- Xie, Y.; Yang, T.; Wang, X.; Chen, X.; Pang, S.; Hu, J.; Wang, A.; Chen, L.; Shen, Z. Applying a Portable Backpack Lidar to Measure and Locate Trees in a Nature Forest Plot: Accuracy and Error Analyses. Remote Sens. 2022, 14, 1806. [Google Scholar] [CrossRef]
- Ruhan, A.; Du, W.; Ying, H.; Wei, B.; Shan, Y.; Dai, H. Estimation of Aboveground Biomass of Individual Trees by Backpack LiDAR Based on Parameter-Optimized Quantitative Structural Models (AdQSM). Forests 2023, 14, 475. [Google Scholar] [CrossRef]
- Su, R.; Du, W.; Shan, Y.; Ying, H.; Rihan, W.; Li, R. Aboveground Carbon Stock Estimation Based on Backpack LiDAR and UAV Multispectral Imagery at the Forest Sample Plot Scale. Remote Sens. 2024, 16, 3927. [Google Scholar] [CrossRef]
- Chen, C.; Zhou, L.; Li, X.; Zhao, Y.; Yu, J.; Lv, L.; Du, H. Optimizing the Spatial Structure of Metasequoia Plantation Forest Based on UAV-LiDAR and Backpack-LiDAR. Remote Sens. 2023, 15, 4090. [Google Scholar] [CrossRef]
- Su, Y.; Guo, Q.; Jin, S.; Guan, H.; Li, Y. The Development and Evaluation of a Backpack LiDAR System for Accurate and Efficient Forest Inventory. IEEE Geosci. Remote Sens. Lett. 2020, 18, 9. [Google Scholar] [CrossRef]
- Yang, S.; Xing, Y.; Xing, T.; Deng, H.; Xi, Z. Multisensors Fusion SLAM-Aided Forest Plot Mapping with Backpack Dual-LiDAR System. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2024, 17, 16051–16070. [Google Scholar] [CrossRef]
- Tanduo, B.; Martino, A.; Balletti, C.; Guerra, F. New Tools for Urban Analysis: A SLAM-Based Research in Venice. Remote Sens. 2022, 14, 4325. [Google Scholar] [CrossRef]
- Li, L.; Wei, L.; Li, N.; Zhang, S.; Wu, Z.; Dong, M.; Chen, Y. Extracting the DBH of Moso Bamboo Forests Using LiDAR: Parameter Optimization and Accuracy Evaluation. Forests 2024, 15, 804. [Google Scholar] [CrossRef]
- Hui, Z.; Cheng, P.; Yang, B.; Zhou, G. Multi-Level Self-Adaptive Individual Tree Detection for Coniferous Forest Using Airborne LiDAR. Int. J. Appl. Earth Obs. Geoinf. 2022, 114, 103028. [Google Scholar] [CrossRef]
- Jiang, T.; Liu, S.; Zhang, Q.; Xu, X.; Sun, J.; Wang, Y. Segmentation of individual trees in urban MLS point clouds using a deep learning framework based on cylindrical convolution network. Int. J. Appl. Earth Obs. Geoinf. 2023, 123, 103473. [Google Scholar] [CrossRef]
- Jiang, R.; Lin, J.; Li, T. Refined Aboveground Biomass Estimation of Moso Bamboo Forest Using Culm Lengths Extracted from TLS Point Cloud. Remote Sens. 2022, 14, 5537. [Google Scholar] [CrossRef]
- Wang, A.; Wang, J.; Li, H.; Hu, J.; Zhou, H.; Zhang, X.; Liu, X.; Wang, W.; Zhang, W.; Wu, S.; et al. Tree Parameter Extraction Method Based on New Remote Sensing Technology and Terrestrial Laser Scanning Technology. Big Data Res. 2024, 36, 100460. [Google Scholar] [CrossRef]
- Xia, K.; Li, C.; Yang, Y.; Deng, S.; Feng, H. Study on Single-Tree Extraction Method for Complex RGB Point Cloud Scenes. Remote Sens. 2023, 15, 2644. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Performance Indicators. | Parametric |
|---|---|
| Lasers | VLP16 |
| Radar Accuracy | ±3 cm |
| Relative Accuracy | ≤3 cm |
| Absolute Precision | 5 cm |
| Sizes | L270 mm × W210 mm × H120 mm |
| Laser Wavelength | 903 nm |
| Scanning Frequency | 300,000 pts/s |
| Horizontal Field of View | 280°~360° |
| Vertical Field of View | −90°~90° |
| Scanning Distance | 100 m |
| Plot | Dominant Tree Species | Number of Trees (n) | Trees per Hectare (N/ha) | DBH Range (cm) | Average DBH (cm) | Standard Deviation | Elevation (m) | Slope (°) |
|---|---|---|---|---|---|---|---|---|
| 1 | C. cathayensis | 6 | 150 | 13.3–20.3 | 16.6 | 2.41 | 37.18 | 2 |
| 2 | C. camphora | 18 | 450 | 28.6–34.7 | 30.8 | 1.44 | 19.32 | 3 |
| 3 | K. bipinnata | 43 | 1075 | 6.1–14.6 | 10.0 | 1.96 | 34.66 | 2 |
| 4 | Q. acutissima | 187 | 4675 | 1.8–16.8 | 7.6 | 3.29 | 76.02 | 3 |
| Tree Species | Route | Number of Plants Identified | Number of Undetected Strains | Recognition Rate |
|---|---|---|---|---|
| C. cathayensis | Route 1 | 6 | 0 | 100% |
| Route 2 | 6 | 0 | 100% | |
| Route 3 | 6 | 0 | 100% | |
| Route 4 | 6 | 0 | 100% | |
| Route 5 | 6 | 0 | 100% | |
| Route 6 | 6 | 0 | 100% | |
| C. camphora | Route 1 | 16 | 0 | 100% |
| Route 2 | 16 | 0 | 100% | |
| Route 3 | 16 | 0 | 100% | |
| Route 4 | 16 | 0 | 100% | |
| Route 5 | 16 | 0 | 100% | |
| Route 6 | 16 | 0 | 100% | |
| K. bipinnata | Route 1 | 43 | 0 | 100% |
| Route 2 | 43 | 0 | 100% | |
| Route 3 | 43 | 0 | 100% | |
| Route 4 | 43 | 0 | 100% | |
| Route 5 | 43 | 0 | 100% | |
| Route 6 | 43 | 0 | 100% | |
| Q. acutissima | Route 1 | 146 | 41 | 78.07% |
| Route 2 | 140 | 47 | 77% | |
| Route 3 | 121 | 66 | 64.71% | |
| Route 4 | 132 | 55 | 70.59% | |
| Route 5 | 134 | 53 | 71.66% | |
| Route 6 | 144 | 43 | 77.01% |
| Tree Species | Route | Accuracy | R2 | RMSE | rRMSE |
|---|---|---|---|---|---|
| C. cathayensis | Route 1 | 97.59% | 0.975 | 0.432 | 2.61% |
| Route 2 | 96.53% | 0.933 | 0.678 | 4.09% | |
| Route 3 | 89.82% | 0.548 | 1.85 | 11.15% | |
| Route 4 | 93.01% | 0.646 | 1.443 | 8.70% | |
| Route 5 | 92.96% | 0.785 | 1.256 | 7.58% | |
| Route 6 | 96.06% | 0.893 | 0.786 | 4.74% | |
| C. camphora | Route 1 | 96.10% | 0.604 | 1.275 | 4.13% |
| Route 2 | 95.29% | 0.581 | 1.600 | 5.20% | |
| Route 3 | 97.42% | 0.607 | 1.125 | 3.66% | |
| Route 4 | 97.47% | 0.259 | 0.985 | 3.21% | |
| Route 5 | 94.43% | 0.528 | 1.824 | 5.93% | |
| Route 6 | 94.31% | 0.608 | 1.862 | 6.05% | |
| K. bipinnata | Route 1 | 92.52% | 0.863 | 0.955 | 9.52% |
| Route 2 | 93.83% | 0.873 | 0.830 | 8.27% | |
| Route 3 | 89.62% | 0.855 | 1.204 | 12.00% | |
| Route 4 | 89.80% | 0.934 | 1.118 | 11.14% | |
| Route 5 | 88.48% | 0.927 | 1.240 | 12.35% | |
| Route 6 | 90.16% | 0.864 | 1.147 | 11.43% | |
| Q. acutissima | Route 1 | 84.57% | 0.821 | 0.914 | 10.22% |
| Route 2 | 88.92% | 0.870 | 0.948 | 10.60% | |
| Route 3 | 90.79% | 0.833 | 1.084 | 11.44% | |
| Route 4 | 87.61% | 0.795 | 1.295 | 14.12% | |
| Route 5 | 86.40% | 0.771 | 1.403 | 15.40% | |
| Route 6 | 84.53% | 0.763 | 1.496 | 17.06% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, L.; Wei, L.; Li, N.; Zhang, S.; Hu, M.; Ma, J. Impact of Backpack LiDAR Scan Routes on Diameter at Breast Height Estimation in Forests. Forests 2025, 16, 527. https://doi.org/10.3390/f16030527
Li L, Wei L, Li N, Zhang S, Hu M, Ma J. Impact of Backpack LiDAR Scan Routes on Diameter at Breast Height Estimation in Forests. Forests. 2025; 16(3):527. https://doi.org/10.3390/f16030527
Chicago/Turabian StyleLi, Longwei, Linjia Wei, Nan Li, Shijun Zhang, Mengyi Hu, and Jing Ma. 2025. "Impact of Backpack LiDAR Scan Routes on Diameter at Breast Height Estimation in Forests" Forests 16, no. 3: 527. https://doi.org/10.3390/f16030527
APA StyleLi, L., Wei, L., Li, N., Zhang, S., Hu, M., & Ma, J. (2025). Impact of Backpack LiDAR Scan Routes on Diameter at Breast Height Estimation in Forests. Forests, 16(3), 527. https://doi.org/10.3390/f16030527