1. Introduction
Accurately and comprehensively acquiring forest structural parameters is significant for forest inventories, ecological research and response to global climate change [
1,
2,
3]. Light detection and ranging (LiDAR) is a non-destructive sensor system that uses a laser beam to detect the 3D information of forest canopy rapidly and accurately, which can overcome the saturation issues of optical remote sensing [
4,
5,
6]. The dense point cloud of the forest can be acquired from different LiDAR platforms, but the complete 3D structure information cannot be described by using a point cloud from a single platform [
7,
8,
9]. In order to obtain forest structural parameters more accurately, it is essential to establish the fusion of multi-platform LiDAR data [
10]. However, due to the complexity of forest scenes and the indistinctiveness of characteristic patterns, the accurate registration of multi-platform LiDAR data remains challenging.
Near-surface LiDAR systems can be categorized into Unmanned Aerial Vehicle LiDAR (UAV-LiDAR) and Terrestrial Laser Scanning LiDAR (TLS-LiDAR) according to the platform [
11,
12]. UAV-LiDAR can acquire high-precision forest point clouds in a few minutes, providing detailed information about forest canopies. However, trunk information usually cannot be detected due to the top-down scanning method [
13,
14,
15]. In contrast, TLS-LiDAR can accurately and rapidly capture 3D structural information below the canopy, such as Diameter at Breast Height (DBH) [
16]. For TLS-LiDAR, it faces challenges in acquiring information about the top canopy due to scanning perspective and canopy occlusion [
17].
In recent years, TLS-LiDAR has evolved from ground-fixed 3D laser scanning systems with relatively low efficiency to mobile 3D laser scanning systems. Ground mobile LiDAR utilizes high-precision Simultaneous Localization and Mapping (SLAM) algorithms and inertial navigation systems for real-time data stitching and mapping, improving operational efficiency. Proudman et al. [
18] successfully estimated the DBH within 7 cm error using point cloud data that were collected by handheld mobile LiDAR through least squares optimization, which was consistent with the study by Bauwens. Bauwens et al. [
19] compared the accuracy of forest structural parameters obtained by TLS and the mobile laser scanning system, which found that the mobile laser scanning obtained the best estimate of DBH. Tai et al. [
20] used LiDAR-SLAM technology for the three-dimensional modeling of plantation forests and achieved high-precision estimation of carbon stock. Due to LiDAR-SLAM also being obstructed by tree canopy shading, the scanned point cloud is likewise limited to understory structures. To overcome the limitation, some scholars have combined the unique advantages of multi-platform by using point clouds from UAV to align with point clouds from TLS or SLAM platforms. Ghorbani et al. [
21] indicated that ALS and TLS systems can capture forest 3D information from different perspectives. Zhou et al. [
22] registered ALS and TLS point cloud data based on canopy gap shape feature points and subsequently estimated tree parameters from the fused data. The results suggested that the combined point cloud was significantly effective in extracting forest 3D structural information. Thus, point cloud registration is a prerequisite for the fusion of multi-platform LiDAR data [
23].
The main purpose of point cloud registration is to establish correspondences between two or more sets of point clouds in different coordinate systems and align or match the data by adjusting their positions [
24,
25]. However, due to differences in coordinates and density of point cloud from multi-platform LiDAR, these differences may lead to bias during the data registration process, which can have an impact on the accurate estimation of forest tree structural parameters [
26]. In order to improve the accuracy of point cloud registration, forestry applications frequently require semi-automated methods, such as manual point selection, but also utilize attribute information from the canopy or trunks to minimize errors. For instance, it is a prevalent approach to extract shape features of the crown and geometric features of the trunk (e.g., straight lines or nearly straight lines) to detect similarities for matching. Paris et al. [
27] transformed collected point cloud data into raster data and matched them based on canopy similarity between ALS and TLS. However, this method was computationally expensive, and canopy segmentation became more challenging for densely vegetated forests. Polewski et al. [
28] used trunk location points and the highest point of the canopy for matching. As the number of matching points increased, the average accuracy reached 0.66 m. The improved accuracy in the experimental results further validated the importance of efficiently and accurately detecting corresponding points between two point sets, which was essential for precisely calculating the transformation matrix and achieving the registration of two datasets.
At present, the registration of point cloud data is generally divided into two steps: coarse registration and fine registration. Coarse registration is a form of global alignment that uses the geometric features of point clouds without considering the initial position [
29,
30]. Common coarse registration methods include three approaches: Normal Distributions Transform (NDT), Fast Point Feature Histogram (FPFH), and Random Sample Consensus (RANSAC): (1) The NDT algorithm [
31] achieves coarse registration by transforming the reference point cloud into a multidimensional normal distribution. Hong et al. [
32] achieved accurate registration of point cloud data based on traditional NDT by introducing the probability of point samples. Wang et al. [
33] compared three algorithms (i.e., PL-ICP, ICP and NDT) to verify the effectiveness of the registration framework. The experimental results showed that the NDT algorithm had high execution efficiency. However, this method had limited matching accuracy in scenes with high forest point cloud density; (2) The FPFH algorithm [
34,
35] is an effective and robust feature descriptor. It establishes a coordinate system between points within the neighborhood of key points, calculating the angles between features such as normal vectors and the coordinate system. Zhao et al. [
36] proposed three automated and parameter-free coarse-to-fine registration methods and recommended the FPFH-OICP algorithm as the optimal registration choice for natural secondary forests. Chen et al. [
37] utilized ULS and TLS data clustering to generate maps hierarchically and combined FPFH features to realize the reconstruction of forest vertical structure and registration. However, this method was sensitive to noise in point clouds; (3) The RANSAC algorithm [
38] can fit robust models, estimating point cloud features through singular value decomposition. Also, it is robust to noise and outliers [
39]. Dai et al. [
40] utilized semantic key points and the RANSAC algorithm for TLS-TLS and TLS-UAV point cloud registration. The results indicated that the proposed framework could improve the practicality and efficiency of multi-source data matching. Tao et al. [
41] proposed a method based on 2D feature points and used a two-point RANSAC algorithm with constraints to compute the 3D transformation, which successfully achieved the registration of point pairs. However, this method only had a certain probability of obtaining reliable models. The probability of correctly matching the corresponding point is low, which is proportional to the number of iterations.
After coarse registration, fine registration is usually applied to SLAM and UAV-LiDAR data at the individual tree scale for the accurate alignment of canopy details. For the fine registration, the Iterative Closest Point (ICP) algorithm [
42,
43] is usually adopted for the local registration of low overlap and large-scale point clouds [
44]. It iteratively matches corresponding points based on a closest distance criterion and determines the transformation connecting two point clouds [
45]. However, its efficiency is dependent on the availability of an initial estimate of the relative position and orientation of the two datasets, which are derived from the coarse registration.
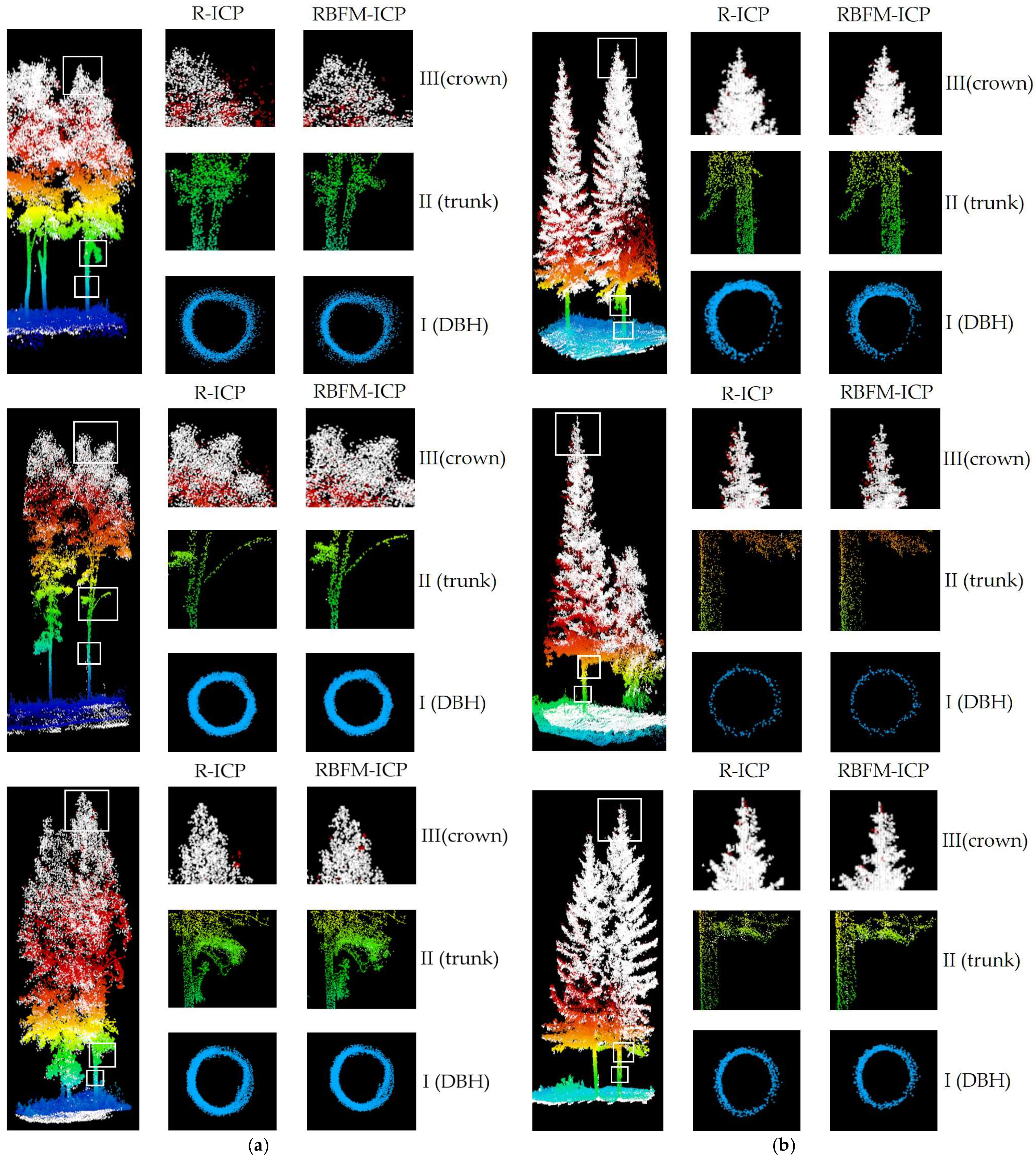
In order to overcome the low probability and poor accuracy of the traditional RANSAC registration algorithm for fitting robust models in dense forest registration, this study proposed an improved RANSAC-ICP algorithm (i.e., RANSAC Bidirectional Matching-ICP, RBFM-ICP) for the registration of SLAM and UAV-LiDAR point cloud, which include coarse registration and fine registration. For coarse registration, the point cloud features of two datasets are firstly extracted by using feature descriptor FPFH, and the corresponding point pairs are determined by bidirectional feature matching, and then the RANSAC algorithm is applied to the corresponding point pairs to calculate the initial transformation matrix. For fine registration, the ICP algorithm is employed to refine the transformation matrix, which is used for the accurate alignment of the SLAM and UAV-LiDAR point cloud. After that, the SLAM and UAV-LiDAR point cloud can be fused together for the derivation of forest structure parameters, such as tree height, diameter at breast height, etc.
2. Materials and Methods
2.1. Study Area
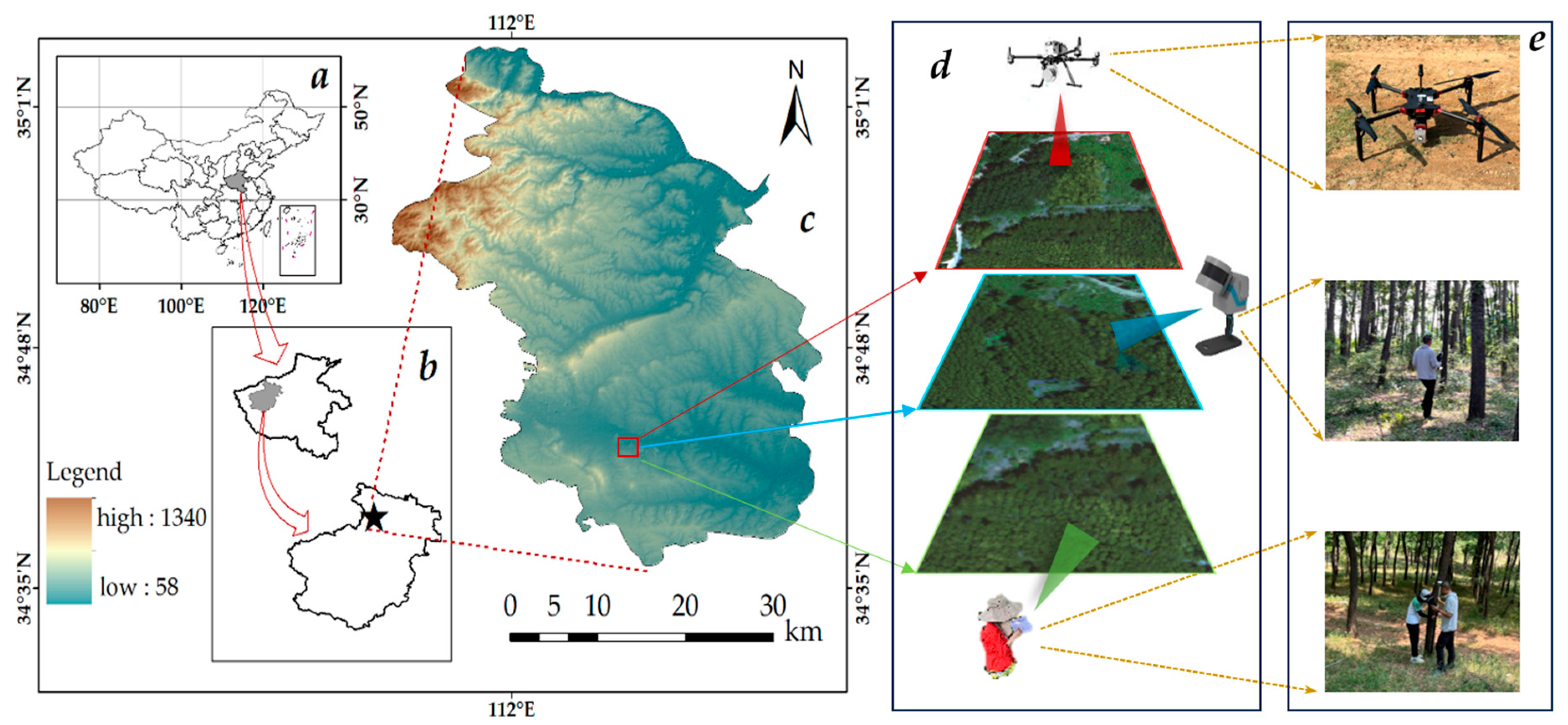
The study area is located in the Yushan Mining Area in Luoyang City in northern China (112.14° E–112.51° E, 34.53° N–34.83° N) (
Figure 1). The mining area features interlaced hills and complex terrain, with an average elevation of 350 m. The vegetation is diverse and includes various types of trees, shrubs, herbs and mosses. Among them, trees are dominated by deciduous broadleaf forests, which are mainly composed of locust tree groves, poplar groves and oak tree groves, accounting for 90% of the deciduous broadleaf forests. In addition, the region has a temperate continental climate with significant temperature differences between the four seasons and a relatively uniform distribution of precipitation.
To validate the effectiveness and robustness of the proposed method, point cloud data were collected from three sample plots (Plot A, Plot B and Plot C) based on different forest stand types and stem densities, and the size of each plot is approximately 30 m×30 m. The stand types of both Plots A and B are locust tree forests with stem densities of 877 stems/ha and 983 stems/ha, respectively. Plot C is composed of poplar tree forests, with a stem density of 347 stems/ha. We collected these three datasets in July 2023, as can be seen in
Figure 1a–c.
Broadleaf and coniferous forests are the two typical vegetation types in our study area. Therefore, to further explore the generalizability of the proposed method, three coniferous forest plots, each with a size of 30 m×30 m, were included in this study for additional validation.
2.2. Multi-Platform LiDAR Data
Two types of laser scanning data from different platforms were used in this study: Unmanned Aerial Vehicle LiDAR data (UAV-LiDAR) and handheld mobile LiDAR data (LiDAR-SLAM). In July 2023, UAV-LiDAR point clouds were collected for a forest area spanning 0.210 square kilometers in the Yushan Mining Area by using D-Lidar200 equipped with the RIEGL mini VUX-1UAV system. The lowest and highest elevations in the surveyed area were 554 m and 599 m, respectively. Flight path spacing was 71 m, with the UAV flying at an altitude of approximately 80 m above the ground at a speed of 8 m/s. Average point density in the surveyed area was about 50 points/m
2. Detailed parameters of D-Lidar200 are provided in
Table 1.
Sample plots of shrubbery, poplar forests and locust tree forests were acquired during the same period using a Feima SLAM 100 handheld LiDAR scanner. SLAM 100 is the first handheld mobile LiDAR scanner produced by Feima Robotics, which has a 360° rotating platform with a 270° × 360° point cloud coverage. Combined with the industry’s SLAM algorithm, SLAM 100 can obtain high-precision 3D point cloud data of the surrounding environment even in conditions with no illumination and no GPS positioning. Detailed parameters of SLAM 100 are provided in
Table 2.
2.3. Overview of the Method
Figure 2 shows the automatic, unmarked coarse-to-fine registration process of point cloud data from two platforms. The process primarily consists of four steps: (1) data pre-processing, including removal of noise points (e.g., isolated and outlier points), coordinate centralizing, and ground point filtering; (2) coarse registration, where downsampling is performed on SLAM and UAV-LiDAR by using the voxel grid algorithm, the Pearson correlation coefficients of the point pairs are computed by using the FPFH feature descriptor and the bidirectional feature matching algorithm, and then the RANSAC algorithm is applied to compute the initial transformation matrix; (3) fine registration, where the point cloud is divided into a series of subspaces by using the KD-tree algorithm to accelerate nearest neighbor search in the ICP process [
46,
47], with the target of refining the transformation matrix; (4) accuracy assessment and analysis to quantify the transformation errors between the aligned SLAM and UAV-LiDAR datasets. Overall, compared to the limitation that the traditional RANSAC algorithm requires to traverse all the points to fit the transformation matrix, our proposed method obtains a set of randomly sampled initial point sets with a small range and higher accuracy by using bidirectional feature matching algorithm according to these point sets to compute the transformation matrix, which can significantly improve the efficiency and accuracy of registration.
2.4. Data Pre-Processing
The pre-processing of raw LiDAR data from two scanners mainly consists of three steps. The process includes:
(1) Removing noise points. Due to the high density of shrubbery in the study area and differences in the operational modes of multi-platform LiDAR sensors, along with potential human operational errors, the collected point cloud data show noise points. Therefore, the collected data cannot be directly used. In order to remove the effect of noise points, the study uses Gaussian filtering to remove the points that differ from the mean value as noise points based on the standard deviate multiplier.
(2) Ground point filtering. To determine whether the subsequent fused point cloud trunks can fit the complete cross-sectional circle. We use two methods for the secondary separation of ground and non-ground points by moving surface filtering and slope filtering. It is worth noting that we set the maximum slope threshold to 2° during the slope filtering process, considering the variation of ground undulation.
(3) Coordinate centralizing. UAV-LiDAR can obtain precise location information through the Global Positioning System (GPS), thereby establishing a global coordinate system. In contrast, LiDAR-SLAM lacks direct GPS signal support and faces the challenge of not being able to obtain accurate positions directly. Thus, when importing point cloud data, there may be a situation where the two datasets are significantly distant. In this study, we improved the stability of data calculations by centralizing both datasets to a unified coordinate system. Specifically, we unify the LiDAR-SLAM data, which lack positional information, with the UAV-LiDAR data into a similar coordinate system by subtracting the respective centroid coordinates and from the two point cloud datasets. (Note: The coordinates of are added to the target point cloud after the accurate transformation of fine registration before output). Based on the pre-processing, point cloud data are used for further registration and analysis.
2.5. Coarse Registration
The coarse registration of SLAM and UAV-LiDAR point cloud data includes the following steps:
(1) Voxel grid downsampling. Due to non-uniform density, large data volume and irregularities in SLAM and UAV-LiDAR point clouds, direct coarse registration of raw point clouds results in low accuracy. Therefore, experiments use voxel grid downsampling [
48] to divide the point cloud space into regular voxels, which improves the efficiency and robustness of the registration algorithm by retaining one or more points with features within each voxel. The absolute density of each voxel is reduced while retaining geometric information for coarse registration. The voxel grid size is selected based on the range of the laser scanner and the density of the point cloud, and voxel sizes of 0.5 and 0.25 m are used to traverse the SLAM and UAV-LiDAR data, respectively.
(2) Extract FPFH features. Coarse registration is used to obtain relative transformation between related data by extracting the corresponding features [
49]. Of the existing methods, the fast point feature histogram (FPFH) descriptor aims to generate robust and stable feature descriptions based on the geometric relationships of neighboring points within a specified range. It calculates the geometrical relations between the query point
and its
k neighbor points, which incorporates the estimated surface normal of the
and the angle difference between the normal vectors and the line connecting the neighbors of
and
[
50]. These geometric features of the inquiry point (
) and its
k neighbors are aggregated to generate the simplified point feature histogram (SPFH) as the feature descriptors. Finally, the FPFH of the point
is determined by calculating the SPFH of the
k neighbor by the weight
.
where
represents the query point, SPFH (simple point feature histogram) represents simplified features considering only the query point and its neighboring points, and
represents the distance weight between the query point and its neighbors.
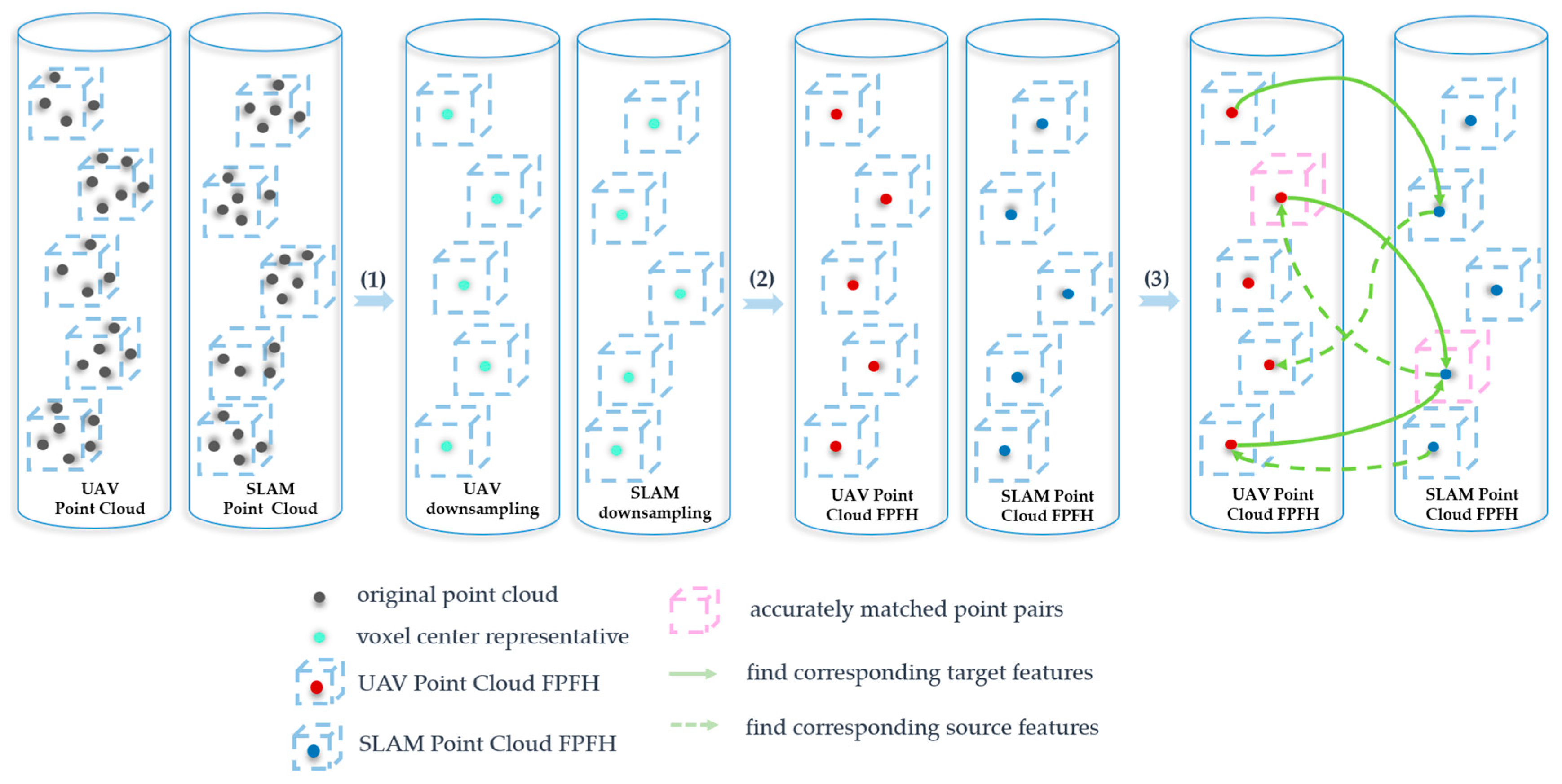
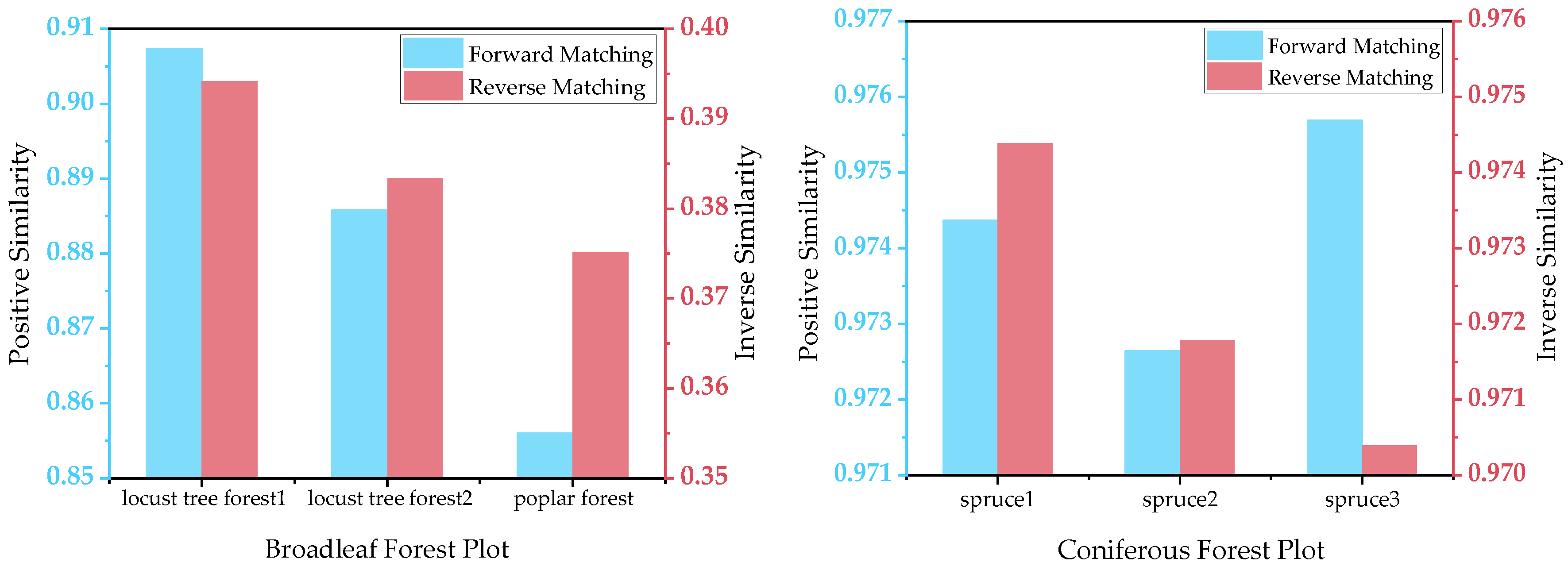
(3) Bidirectional feature matching. Based on the extracted FPFH feature descriptors, a loop (i.e., bidirectional feature matching) is added before the initialization of the local sampling of the RANSAC algorithm. In this loop, firstly, establish KD-tree indexes for the reference point cloud and the target point cloud. Secondly, use the KD-tree to detect the feature point
with the highest similarity to the query point
in the target point cloud and record the index
of this feature point
. In order to characterize the degree of similarity between the reference point cloud and the target point cloud, we transform the 33-dimensional FPFH feature vectors contained in the two datasets into arrays
and
and calculate the correlation between the two types of data based on the Pearson correlation coefficient.
where
and
represent the elements of the
i-th dimension in arrays
and
.
and
are the means of arrays
and
, respectively. And
n is the dimensionality of the arrays (33 dimensions).
Finally, take the feature point
from the second step as the query point, identify the most similar feature point
in the reference point cloud, and record the index
of
. If the index of
(i.e.,
) points to a point that is also
, save
from the reference point cloud and
from the target point cloud into the container
N. Loop through all points and store all matched point pairs that satisfy the above operations in the container
N, which will also serve as a small-scale point cloud set for the random sampling initialization of the RANSAC algorithm.
Figure 3 provides a comprehensive display of steps (1–3).
(4) Calculate the initial transformation matrix. A set of randomly sampled initialized point pair set with small range and high accuracy can be obtained by bidirectional feature matching. Then, the RANSAC algorithm can complete the coarse registration by fitting the optimal transformation matrix based on this set of point pairs. Random Sample Consensus (RANSAC) is a computational transformation method for constructing robust models. The main steps include: (1) Local random point sampling initialization. Three non-collinear data points
are selected from the reference point cloud
P(UAV), followed by the corresponding set of points
being selected from the target point cloud
Q(SLAM). (2) Calculate rotational translation matrix
by the least squares algorithm and transform the target point cloud
Q into a new dataset
Q’. (3) Compare
Q’ and
H, calculate the number of consistent or matching points to form a consensus set, and calculate the score by the matching points in the consensus set until the score reaches a predefined threshold or the maximum number of iterations is satisfied. (4) Select the optimal transformation matrix
M to align the target point cloud with the reference point cloud. The pseudo-code for the coarse registration algorithm is shown in Algorithm 1.
| Algorithm 1 Coarse Registration |
| Input: Point cloud datasets from different platforms |
| Output: Number of matched point pairs and initial transformation matrix |
| 1: | Point Cloud A and Point Cloud B ← voxel grid downsampling and extract FPFH features |
| 2: | While (iterations < Point Cloud A. size) do |
| 3: | calculate the highest similarity match in point cloud B with Pearson correlation coefficient |
| 4: | index1[i] ← store the nearest neighbor index of the i-th point in cloud B in index1 |
| 5: | end while |
| 6: | While (iterations < Point Cloud B. size) do |
| 7: | calculate the highest similarity match in point cloud A with Pearson correlation coefficient |
| 8: | index2[i] ← store the nearest neighbor index of the i-th point in cloud A in index2 |
| 9: | end while |
| 10: | Bidirectional Feature Matching (vector<int> index1, vector<int> index2) |
| 11: | { |
| 12: | While (iterations < index1.size) do |
| 13: | int m = index1[i] |
| 14: | int n = index2[m] |
| 15: | if (n = = i) |
| 16: | store this set of point pairs in a structure variable |
| 17: | store all the point pairs that meet the above conditions in container N |
| 18: |
else |
| 19: | filter out this point pair |
| 20: |
end while |
| 21: | } |
| 22: | Perform RANSAC algorithm |
| 23: | return Number of matched point pairs and initial transformation matrix |
2.6. Fine Registration
To reduce the alignment error after coarse registration between the SLAM and UAV-LiDAR point cloud, we further use the ICP algorithm for fine registration to enhance alignment accuracy between the two point cloud datasets. Iterative Closest Point (ICP) algorithm constructs a rigid transformation by matching query points
(from UAV) with corresponding points
(from SLAM), which iteratively and accurately aligns the two datasets through repeated searching and transformation until convergence is achieved. The KD-tree is constructed for the initial position point cloud dataset before the iterative process, where each node represents a point, and the tree’s segmentation axes (i.e., x, y and z coordinate axes) are determined by the position of the points. In each iteration, for the target points, the KD-tree can be used to find the closest point in the reference point cloud. The convergence criterion between the reference point cloud and the target point cloud is the transformation error
. If
is less than the convergence threshold (minimum distance
ε), the algorithm stops iterating; otherwise, it proceeds to the next iteration.
where
are the three-dimensional coordinates of the reference points (i.e., UAV), and
are the three-dimensional coordinates of the target points (i.e., SLAM).
ε is the minimum distance threshold between two points, and
n and
m are the number of reference and target points, respectively.
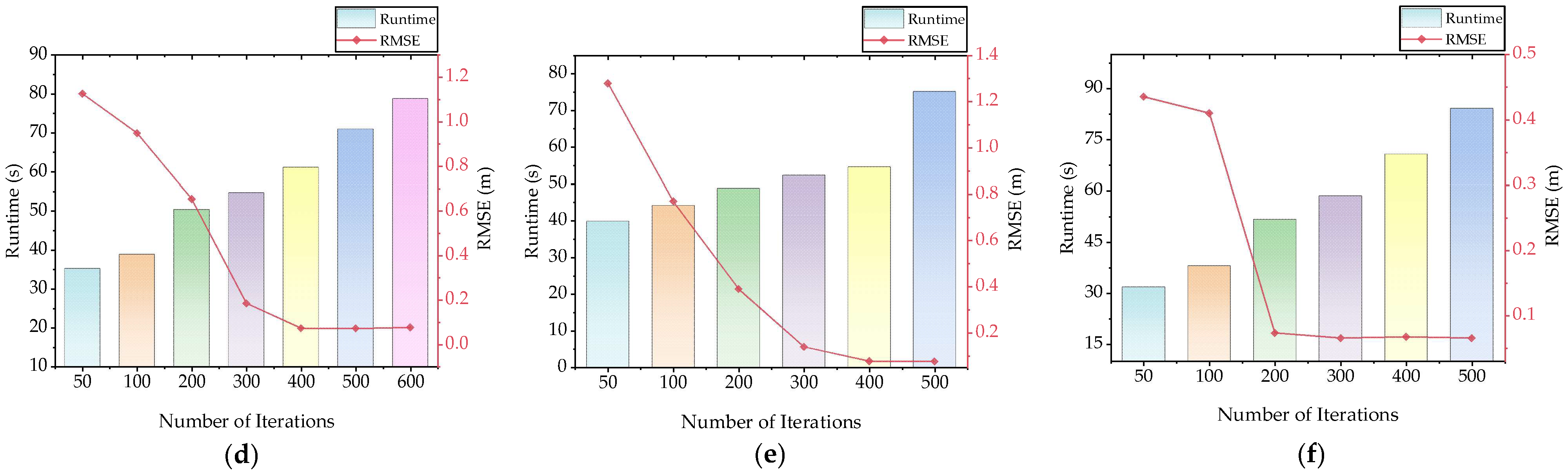
2.7. Accuracy Assessment
Non-rigid transformation is a type of transformation that allows objects to undergo shape changes, whereas the translations and rotations performed by the aligned LiDAR point cloud are rigid transformations. It means that the relative positions and distances between the parts of the object do not change after the transformation. The transformation error between reference and target points can be expressed by calculating the Euclidean distance between corresponding points. This distance metric takes into account differences in both horizontal and vertical directions, thereby considering the positional offset between matched point pairs. Mean absolute distance (MAD) and root mean square error (RMSE) are used in this research to quantitatively evaluate the performance of the two coarse-to-fine algorithms as follows:
where
represents a point in the reference point cloud,
represents the corresponding point in the transformed point cloud,
represents the Euclidean distance between corresponding points
and
, and
n is the number of corresponding points.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}