
Assessing Forest Resources with Terrestrial and Backpack LiDAR: A Case Study on Leaf-On and Leaf-Off Conditions in Gari Mountain, Hongcheon, Republic of Korea


Abstract
1. Introduction
2. Materials and Methods
2.1. Study Area
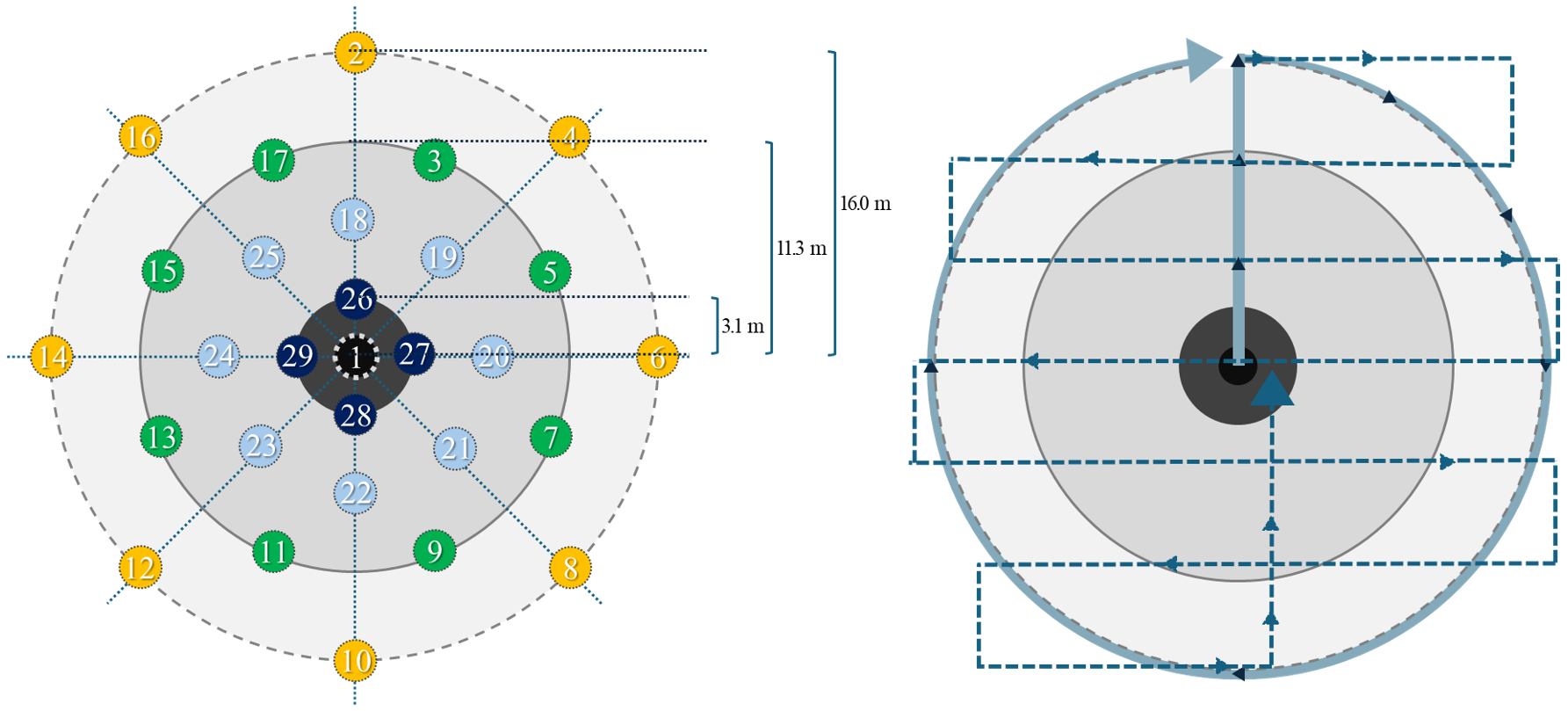
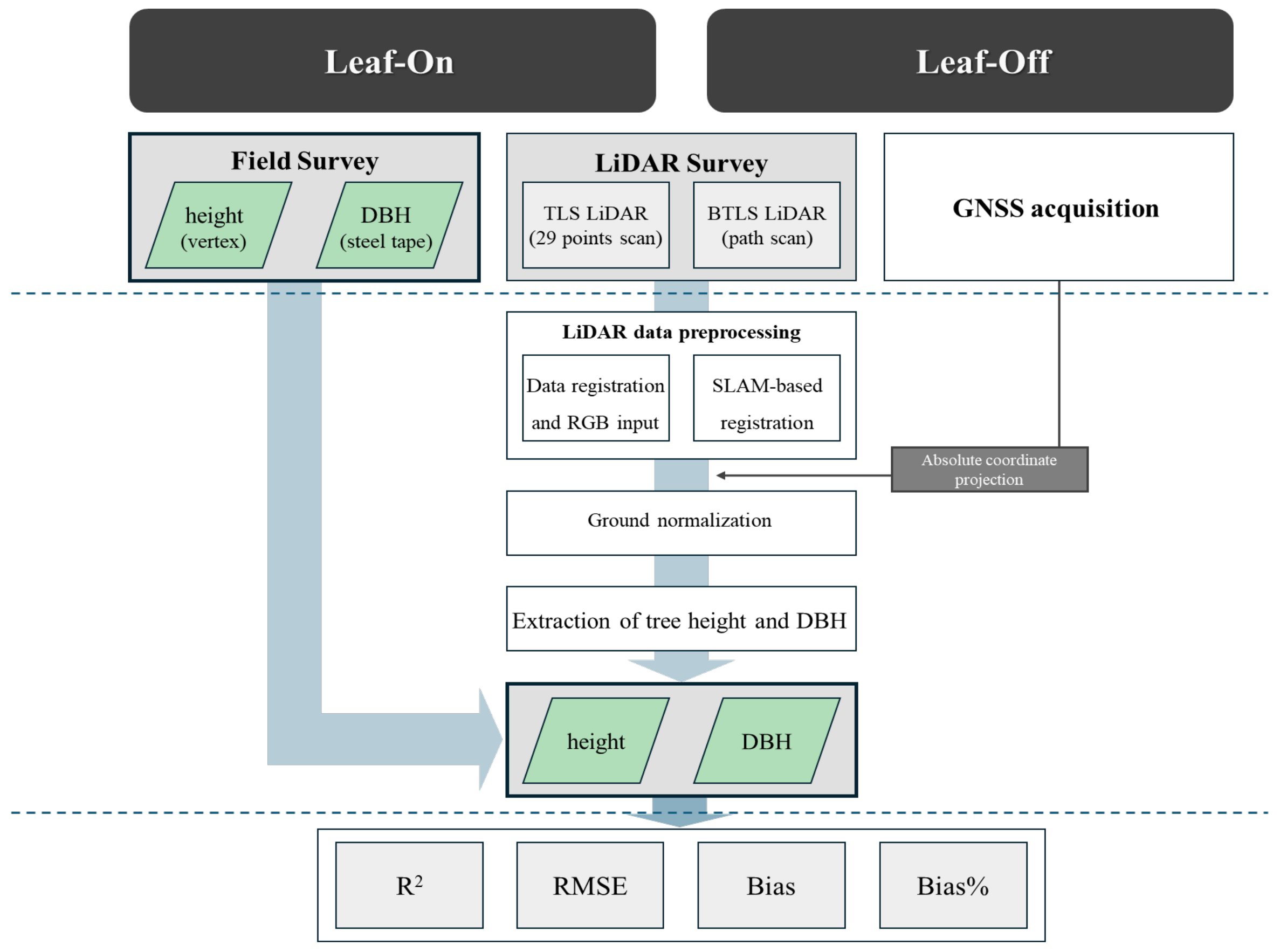
2.2. Data Collection
2.3. Comparison of LiDAR Measurements and Field Survey Methods
2.4. Statistical Analysis
3. Results and Discussion
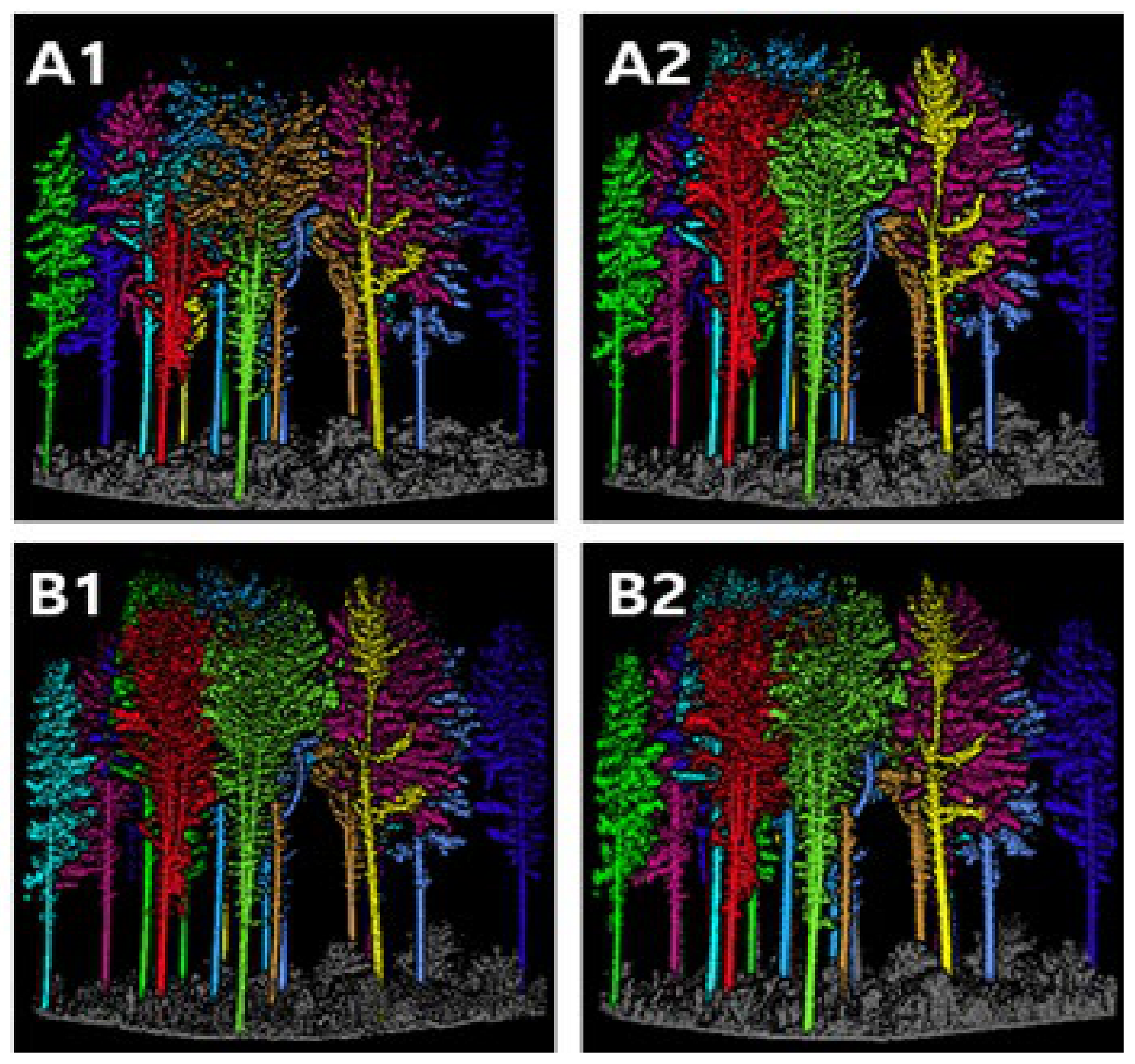
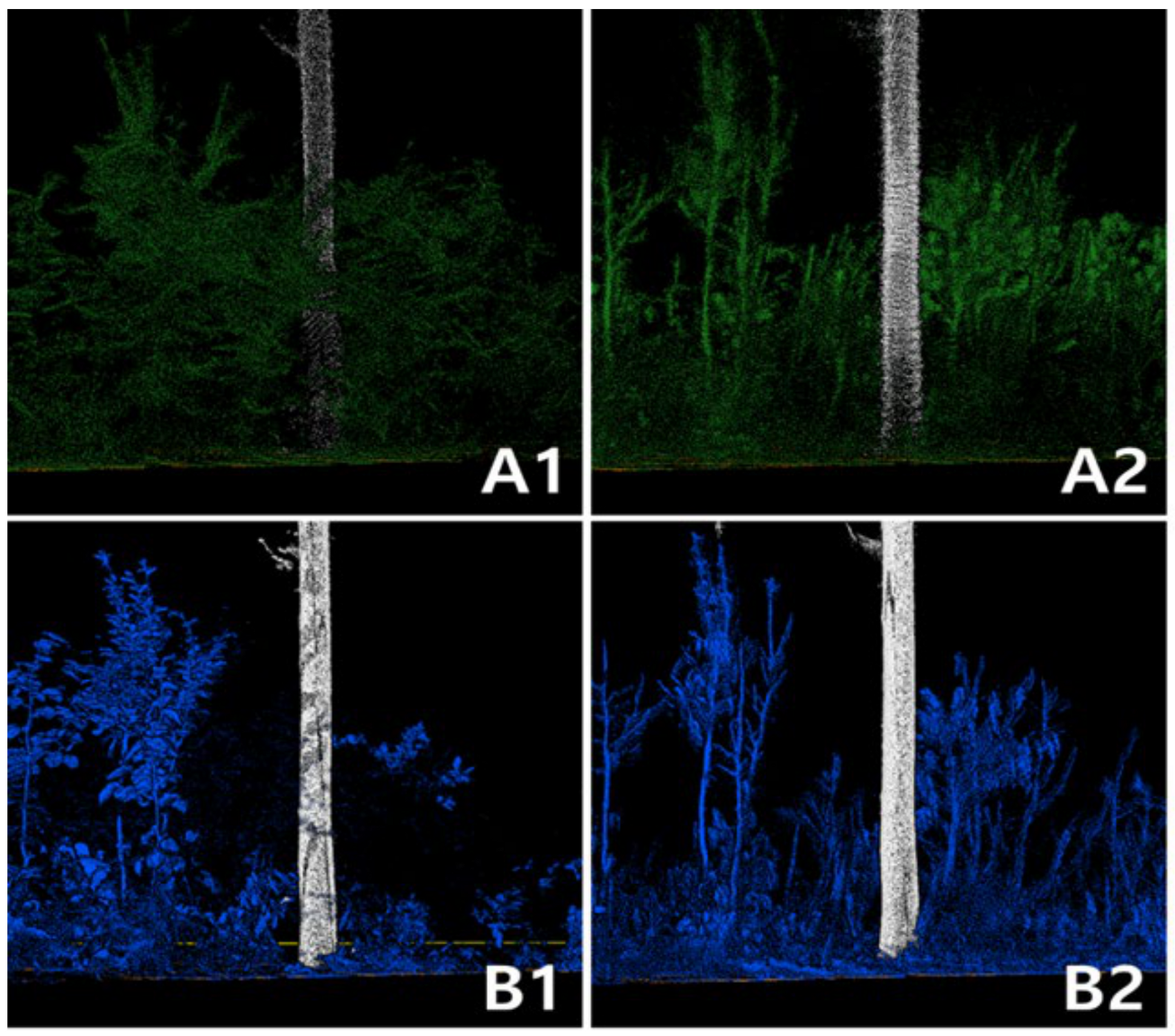
3.1. Tree Mapping Results
3.2. Comparison of DBH and Tree Height Estimation Using LiDAR and Field Survey Methods
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Jeon, B.H.; Lee, S.H.; Lee, Y.J.; Kim, H.; Kang, H.M. Estimation of Site Index and stem volume equations for Larix kaempferi stand in jinan, chonbuk. J. Korean For. Soc. 2007, 96, 40–47. [Google Scholar]
- Hyyppä, E.; Kukko, A.; Kaijaluoto, R.; White, J.C.; Wulder, M.A.; Pyörälä, J.; Liang, X.; Yu, X.; Wang, Y.; Kaartinen, H.; et al. Accurate derivation of stem curve and volume using backpack mobile laser scanning. ISPRS J. Photogramm. 2020, 161, 246–262. [Google Scholar] [CrossRef]
- Ko, C.; Lee, S.; Yim, J.; Kim, D.; Kang, J. Comparison of forest inventory methods at plot-level between a Backpack Personal Laser Scanning (BPLS) and conventional equipment in Jeju island, South Korea. Forests 2021, 12, 308. [Google Scholar] [CrossRef]
- Clark, N.A.; Wynne, R.H.; Schmoldt, D.L. A review of past research on dendrometers. Forest Sci. 2000, 46, 570–576. [Google Scholar] [CrossRef]
- Olofsson, K.; Holmgren, J.; Olsson, H. Tree stem and height measurements using terrestrial laser scanning and the RANSAC algorithm. Remote Sens. 2014, 6, 4323–4344. [Google Scholar] [CrossRef]
- Rutzinger, M.; Pratihast, A.K.; Oude Elberink, S.; Vosselman, G. Detection and modelling of 3D trees from mobile laser scanning data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2010, 38, 520–525. [Google Scholar]
- Chen, S.; Liu, H.; Feng, Z.; Shen, C.; Chen, P. Applicability of personal laser scanning in forestry inventory. PLoS ONE 2019, 14, e0211392. [Google Scholar] [CrossRef]
- Ko, C.; Lee, J.; Kim, D.; Kang, J. The application of terrestrial light detection and ranging to forest resource inventories for timber yield and carbon sink estimation. Forests 2022, 13, 2087. [Google Scholar] [CrossRef]
- Lee, Y.; Lee, J. Evaluation of accuracy in estimating diameter at breast height based on the scanning conditions of terrestrial laser scanning and circular fitting algorithm. Forests 2024, 15, 313. [Google Scholar] [CrossRef]
- Maltamo, M.; Næsset, E.; Vauhkonen, J. Forestry applications of airborne laser scanning. Concepts and Case Studies. Manag. For. Ecosys. 2014, 27, 460. [Google Scholar]
- Zhou, L.; Li, X.; Zhang, B.; Xuan, J.; Gong, Y.; Tan, C.; Huang, H.; Du, H. Estimating 3D Green Volume and Aboveground Biomass of Urban Forest Trees by UAV-Lidar. Remote Sens. 2022, 14, 5211. [Google Scholar] [CrossRef]
- Ayrey, E.; Hayes, D.J. The use of three-dimensional convolutional neural networks to interpret LiDAR for forest inventory. Remote Sens. 2018, 10, 649. [Google Scholar] [CrossRef]
- Erikson, M.; Karin, V. Finding tree-stems in laser range images of young mixed stands to perform selective cleaning. In Proceedings of the ScandLaser Scientific Workshop on Airborne Laser Scanning of Forest, Umeå, Sweden, 3–4 September 2003. [Google Scholar]
- Lovell, J.L.; Jupp, D.L.B.; Culvenor, D.S.; Coops, N.C. Using airborne and ground-based ranging lidar to measure canopy structure in Australian forests. Can. J. Remote Sens. 2003, 29, 607–622. [Google Scholar] [CrossRef]
- Brolly, G.; Király, G. Algorithms for stem mapping by means of terrestrial laser scanning. Acta Silv. Lignaria Hung. 2009, 5, 119–130. [Google Scholar] [CrossRef]
- Murphy, G.E.; Acuna, M.A.; Dumbrell, I. Tree value and log product yield determination in radiata pine (Pinus radiata) plantations in Australia: Comparisons of terrestrial laser scanning with a forest inventory system and manual measurements. Can. J. For. Res. 2010, 40, 2223–2233. [Google Scholar] [CrossRef]
- Lovell, J.L.; Jupp, D.L.B.; Newnham, G.J.; Culvenor, D.S. Measuring tree stem diameters using intensity profiles from ground-based scanning lidar from a fixed viewpoint. ISPRS J. Photogramm. 2011, 66, 46–55. [Google Scholar] [CrossRef]
- Kukko, A. Mobile Laser Scanning—System Development, Performance and Applications. Ph.D. Thesis, Aalto University, Espoo, Finland, 2013. [Google Scholar]
- Liang, X.; Kukko, A.; Kaartinen, H.; Hyyppä, J.; Yu, X.; Jaakkola, A.; Wang, Y. Possibilities of a personal laser scanning system for forest mapping and ecosystem services. Sensors 2014, 14, 1228–1248. [Google Scholar] [CrossRef] [PubMed]
- Tsuchiya, B.; Mochizuki, H.; Hoshikawa, T.; Suzuki, S. Error estimation of trunk diameter and tree height measured with a backpack LiDAR system in Japanese plantation forests. Landscape Ecol. Eng. 2023, 19, 169–177. [Google Scholar] [CrossRef]
- Yang, S.; Xing, Y.; Xing, T.; Deng, H.; Xi, Z. Multi-sensors fusion SLAM-aided forest plot mapping with backpack dual-LiDAR system. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sensing 2024, 17, 16051–16070. [Google Scholar] [CrossRef]
- Gharineiat, Z.; Tarsha Kurdi, F.; Henny, K.; Gray, H.; Jamieson, A.; Reeves, N. Assessment of NavVis VLX and BLK2GO SLAM Scanner Accuracy for Outdoor and Indoor Surveying Tasks. Remote Sens. 2024, 16, 3256. [Google Scholar] [CrossRef]
- Saarela, S.; Breidenbach, J.; Raumonen, P.; Grafström, A.; Ståhl, G.; Ducey, M.J.; Astrup, R. Kriging prediction of stand-level forest information using mobile laser scanning data adjusted for nondetection. Can. J. For. Res. 2017, 47, 1257–1265. [Google Scholar] [CrossRef]
- Cabo, C.; Del Pozo, S.D.; Rodríguez-Gonzálvez, P.; Ordóñez, C.; González-Aguilera, D. Comparing terrestrial laser scanning (TLS) and wearable laser scanning (WLS) for individual tree modeling at plot level. Remote Sensing 2018, 10, 540. [Google Scholar] [CrossRef]
- Del Perugia, B.; Giannetti, F.; Chirici, G.; Travaglini, D. Influence of scan density on the estimation of single-tree attributes by handheld mobile laser scanning. Forests 2019, 10, 277. [Google Scholar] [CrossRef]
- The VL Vertex Laser. Available online: https://haglofsweden.com/product-catalogs/ (accessed on 23 October 2024).
- Leica. Leica Cyclone 3D Point Cloud Processing Software. 2024. Available online: https://leica-geosystems.com/products/laser-scanners/software/leica-cyclone (accessed on 23 October 2024).
- LiBackpack. Mobile Handheld LiDAR—3D Mapping System. Available online: https://www.greenvalleyintl.com/LiBackpackDGC50H/ (accessed on 23 October 2024).
- Bauwens, S.; Bartholomeus, H.; Calders, K.; Lejeune, P. Forest inventory with terrestrial LiDAR: A comparison of static and handheld mobile laser scanning. Forests 2016, 7, 127. [Google Scholar] [CrossRef]
- LiDAR360—Point Cloud Processing Software. Available online: https://www.greenvalleyintl.com/LiDAR360/ (accessed on 23 October 2024).
- Shao, J.; Lin, Y.-C.; Wingren, C.; Shin, S.-Y.; Fei, W.; Carpenter, J.; Habib, A.; Fei, S. Large-scale inventory in natural forests with mobile LiDAR point clouds. Nat. For. Inventory J. 2024, 10, 100168. [Google Scholar] [CrossRef]
- Zhu, D.; Liu, X.; Zheng, Y.; Xu, L.; Huang, Q. Improved Tree Segmentation Algorithm Based on Backpack-LiDAR Point Cloud. Forests 2024, 15, 136. [Google Scholar] [CrossRef]
- Liang, X.; Wang, Y.; Pyörälä, J.; Lehtomäki, M.; Yu, X.; Kaartinen, H.; Kukko, A.; Honkavaara, E.; Issaoui, A.E.I.; Nevalainen, O.; et al. Forest in situ observations using unmanned aerial vehicle as an alternative of terrestrial measurements. For. Ecosyst. 2019, 6, 20. [Google Scholar] [CrossRef]
- Huang, H.; Li, Z.; Gong, P.; Cheng, X.; Clinton, N.; Cao, C.; Ni, W.; Wang, L. Automated methods for measuring DBH and tree heights with a commercial scanning lidar. Photogramm. Eng. Remote Sens. 2011, 77, 219–227. [Google Scholar] [CrossRef]
- Fleck, S.; Mölder, I.; Jacob, M.; Gebauer, T.; Jungkunst, H.F.; Leuschner, C. Comparison of conventional eight-point crown projections with LIDAR-based virtual crown projections in a temperate old-growth forest. Ann. For. Sci. 2011, 68, 1173–1185. [Google Scholar] [CrossRef]
- Liang, X.; Hyyppä, J. Automatic stem mapping by merging several terrestrial laser scans at the feature and decision levels. Sensors 2013, 13, 1614–1634. [Google Scholar] [CrossRef]
- Wang, Y.; Kukko, A.; Hyyppä, E.; Hakala, T.; Pyörälä, J.; Lehtomäki, M.; El Issaoui, A.; Yu, X.; Kaartinen, H.; Liang, X.; et al. Seamless integration of above- and under-canopy unmanned aerial vehicle laser scanning for forest investigation. For. Ecosyst. 2021, 8, 10. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Species | Dense | Slope (°) | Age Class | Altitude (m) | Tree/0.08 ha |
|---|---|---|---|---|---|
| Larix kaempferi | Low | 10 | VI | 291~548 | 12 |
| Medium | 29 | VI | 394~680 | 26 | |
| High | 28 | V | 245~351 | 49 | |
| Pinus koraiensis | Low | 14 | VI | 308~555 | 18 |
| Medium | 35 | VI | 334~647 | 39 | |
| High | 20 | VI | 334~620 | 115 |
| Specifications | ||
|---|---|---|
| Laser Sensor | TLS (Leica RTC360) | BPLS (Velodyne VLP-16×2) |
| Wavelength | 1550 nm | 905 nm |
| LiDAR Accuracy | 1.9 mm~5.3 mm (1.9 mm @ 10 m 2.9 mm @ 20 m 5.3 mm @ 40 m) | ±3 cm |
| Scan Range | 130 m | 100 m |
| Weight | 5.35 kg without battery | 8.8 kg without battery |
| Scan Rate | 2,000,000 pts/s | 600,000 pts/s |
| Field of view | vertical: 300° horizontal: 360° | vertical: −90°– + 90° horizonal: 360° |
| Camera | 36 MP 3-camera system 432 MP×raw data for calibrated 360° × 300° spherical image | |
| Statistics | Calculation Forms |
|---|---|
| Coefficient of determination (R2) | |
| Bias | |
| Bias% | |
| Root Mean Square Error (RMSE) | |
| Root Mean Square Error% (RMSE%) |
| Species | Season | Number of Trees | TLS Mapped | BPLS Mapped | TLS Percentage (%) | BPLS Percentage (%) |
|---|---|---|---|---|---|---|
| Larix kaempferi | Leaf-Off | Low | 11 | 11 | 100 | 100 |
| Medium | 26 | 26 | 100 | 100 | ||
| High | 49 | 49 | 100 | 100 | ||
| Leaf-On | Low | 11 | 11 | 100 | 100 | |
| Medium | 26 | 26 | 100 | 100 | ||
| High | 49 | 40 | 100 | 81.63 | ||
| Pinus koraiensis | Leaf-Off | Low | 18 | 18 | 100 | 100 |
| Medium | 29 | 29 | 100 | 100 | ||
| High | 95 | 95 | 100 | 100 | ||
| Leaf-On | Low | 18 | 18 | 100 | 100 | |
| Medium | 29 | 29 | 100 | 100 | ||
| High | 95 | 95 | 100 | 100 |
| Species | Equipment | Season | Stand Density | R2 | Bias | Bias% | RMSE | RSME% |
|---|---|---|---|---|---|---|---|---|
| Larix kaempferi | TLS | Leaf-Off | Low | 0.914 | −0.473 | −1.408 | 1.346 | 4.010 |
| Medium | 0.954 | 0.254 | 0.986 | 0.918 | 3.559 | |||
| High | 0.860 | 0.085 | 0.402 | 1.669 | 7.921 | |||
| BPLS | Low | 0.846 | 0.345 | 1.029 | 1.534 | 4.569 | ||
| Medium | 0.417 | −0.488 | −1.895 | 3.210 | 12.451 | |||
| High | 0.727 | 0.092 | 0.438 | 2.429 | 11.534 | |||
| TLS | Leaf-On | Low | 0.881 | 0.400 | 1.191 | 1.425 | 4.245 | |
| Medium | 0.822 | 0.891 | 3.457 | 2.062 | 8.000 | |||
| High | 0.725 | 0.491 | 2.332 | 2.294 | 10.891 | |||
| BPLS | Low | 0.327 | −0.827 | −2.464 | 3.596 | 10.710 | ||
| Medium | 0.596 | 0.258 | 1.000 | 3.286 | 12.746 | |||
| High | 0.364 | 1.500 | 7.121 | 6.038 | 28.667 | |||
| Pinus koraiensis | TLS | Leaf-Off | Low | 0.971 | 0.217 | 0.635 | 1.075 | 3.148 |
| Medium | 0.960 | 0.409 | 1.301 | 0.874 | 2.779 | |||
| High | 0.954 | 0.315 | 1.844 | 1.433 | 8.396 | |||
| BPLS | Low | 0.818 | 1.006 | 2.945 | 7.754 | 22.710 | ||
| Medium | 0.568 | 3.706 | 11.778 | 3.533 | 11.230 | |||
| High | 0.901 | 0.923 | 5.408 | 2.198 | 12.878 | |||
| TLS | Leaf-On | Low | 0.823 | −0.044 | −0.130 | 3.261 | 9.551 | |
| Medium | 0.708 | 0.528 | 1.678 | 2.339 | 7.436 | |||
| High | 0.884 | 0.013 | 0.074 | 2.536 | 14.853 | |||
| BPLS | Low | 0.721 | 1.294 | 3.791 | 6.222 | 18.223 | ||
| Medium | 0.312 | 5.172 | 16.440 | 5.023 | 15.965 | |||
| High | 0.158 | 0.153 | 0.894 | 7.380 | 43.230 |
| Species | Equipment | Season | Stand Density | R2 | Bias | Bias% | RMSE | RSME% |
|---|---|---|---|---|---|---|---|---|
| Larix kaempferi | TLS | Leaf-Off | Low | 0.780 | −1.688 | −6.280 | 2.076 | 7.727 |
| Medium | 0.902 | −2.155 | −11.775 | 2.298 | 12.552 | |||
| High | 0.583 | −3.522 | −18.671 | 3.917 | 20.763 | |||
| BPLS | Low | 0.780 | −1.476 | −5.494 | 1.919 | 7.143 | ||
| Medium | 0.807 | −2.834 | −15.484 | 3.066 | 16.751 | |||
| High | 0.627 | −3.052 | −16.181 | 3.456 | 18.323 | |||
| TLS | Leaf-On | Low | 0.758 | −1.457 | −5.421 | 1.949 | 7.254 | |
| Medium | 0.908 | −2.049 | −11.194 | 2.188 | 11.955 | |||
| High | 0.428 | −2.968 | −15.734 | 3.594 | 19.052 | |||
| BPLS | Low | 0.855 | −0.992 | −3.691 | 1.272 | 4.732 | ||
| Medium | 0.671 | −1.039 | −5.675 | 2.085 | 11.389 | |||
| High | 0.108 | 0.609 | 3.230 | 5.070 | 26.876 | |||
| Pinus koraiensis | TLS | Leaf-Off | Low | 0.690 | −1.384 | −6.521 | 1.788 | 8.428 |
| Medium | 0.726 | −2.848 | −17.236 | 2.926 | 17.708 | |||
| High | 0.529 | −2.744 | −21.129 | 3.933 | 30.287 | |||
| BPLS | Low | 0.707 | −1.231 | −5.800 | 1.712 | 8.069 | ||
| Medium | 0.446 | −2.455 | −14.857 | 2.536 | 15.346 | |||
| High | 0.411 | −2.911 | −22.416 | 4.198 | 32.324 | |||
| TLS | Leaf-On | Low | 0.745 | −1.129 | −5.321 | 1.552 | 7.316 | |
| Medium | 0.615 | −2.751 | −16.651 | 2.859 | 17.303 | |||
| High | 0.451 | −2.835 | −21.829 | 4.123 | 31.749 | |||
| BPLS | Low | 0.011 | 1.072 | 5.051 | 3.082 | 14.527 | ||
| Medium | 0.491 | −0.762 | −4.613 | 1.733 | 10.486 | |||
| High | 0.339 | −1.199 | −9.228 | 3.275 | 25.214 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ko, C.; Kang, J.; Park, J.; Lee, M. Assessing Forest Resources with Terrestrial and Backpack LiDAR: A Case Study on Leaf-On and Leaf-Off Conditions in Gari Mountain, Hongcheon, Republic of Korea. Forests 2024, 15, 2230. https://doi.org/10.3390/f15122230
Ko C, Kang J, Park J, Lee M. Assessing Forest Resources with Terrestrial and Backpack LiDAR: A Case Study on Leaf-On and Leaf-Off Conditions in Gari Mountain, Hongcheon, Republic of Korea. Forests. 2024; 15(12):2230. https://doi.org/10.3390/f15122230
Chicago/Turabian StyleKo, Chiung, Jintack Kang, Jeongmook Park, and Minwoo Lee. 2024. "Assessing Forest Resources with Terrestrial and Backpack LiDAR: A Case Study on Leaf-On and Leaf-Off Conditions in Gari Mountain, Hongcheon, Republic of Korea" Forests 15, no. 12: 2230. https://doi.org/10.3390/f15122230
APA StyleKo, C., Kang, J., Park, J., & Lee, M. (2024). Assessing Forest Resources with Terrestrial and Backpack LiDAR: A Case Study on Leaf-On and Leaf-Off Conditions in Gari Mountain, Hongcheon, Republic of Korea. Forests, 15(12), 2230. https://doi.org/10.3390/f15122230