
Construction of a Wi-Fi System with a Tethered Balloon in a Mountainous Region for the Teleoperation of Vehicular Forestry Machines


Abstract
:1. Introduction
2. Materials and Methods
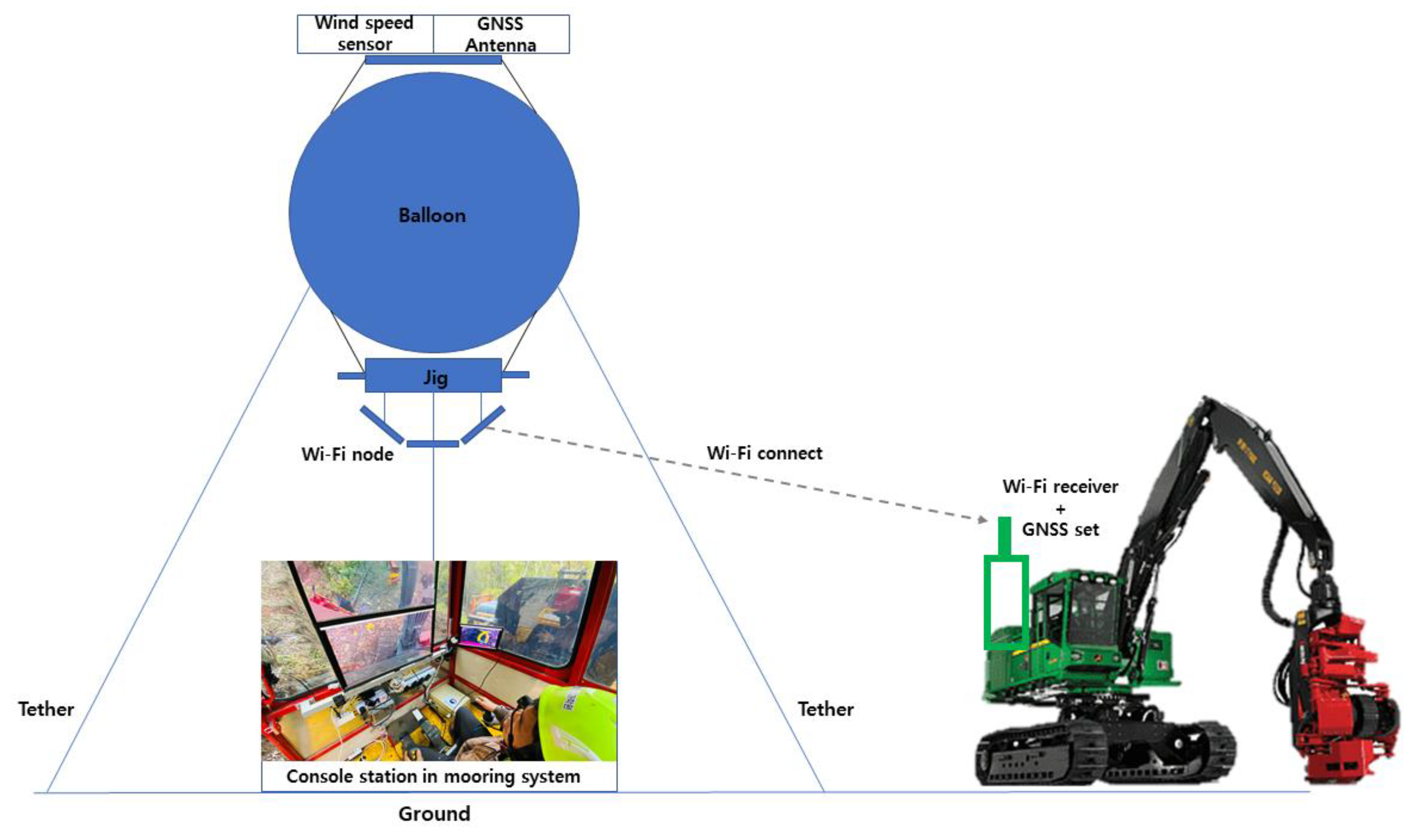
2.1. Wi-Fi System with a Tethered Balloon
2.1.1. Helium Balloon
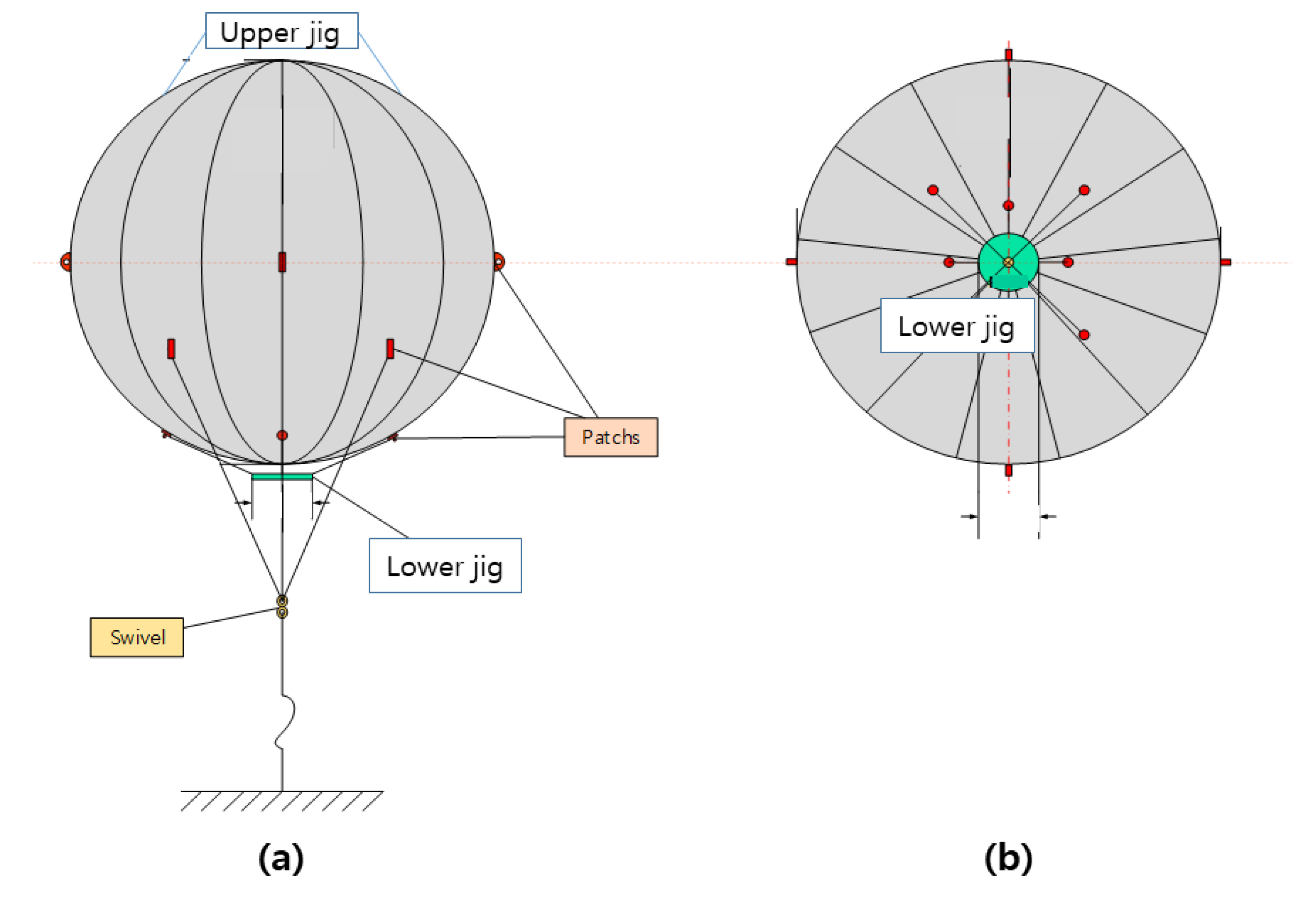
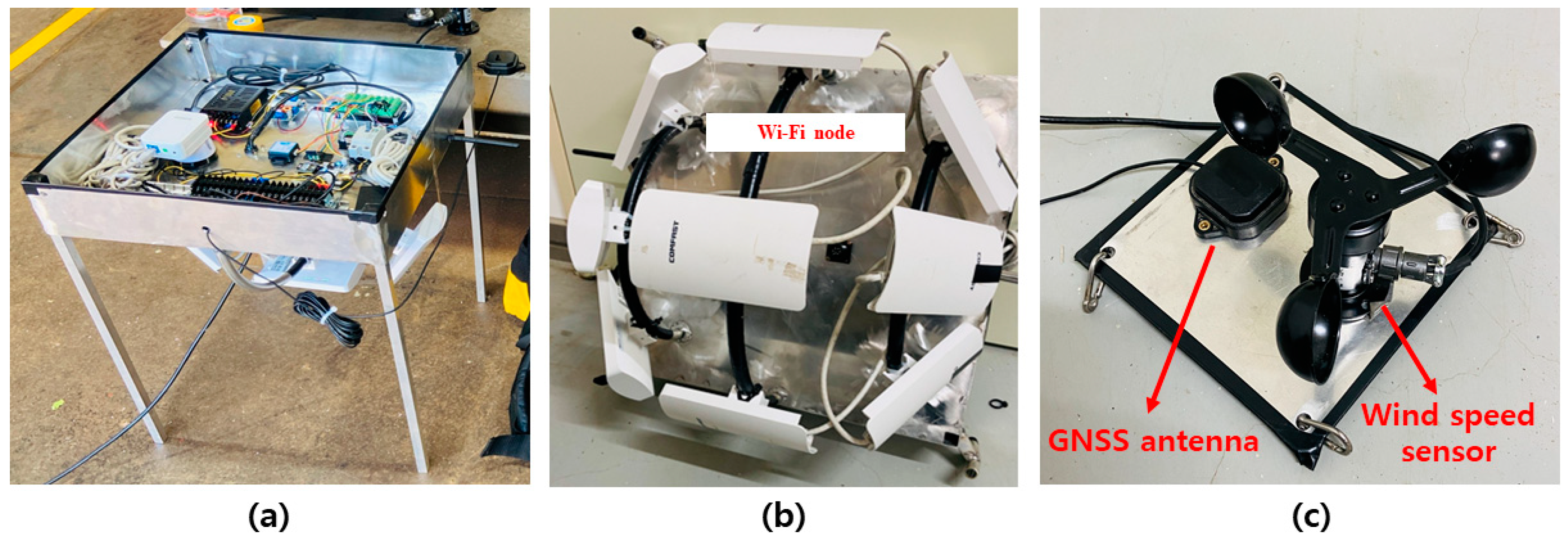
2.1.2. Measurement System and Jig
2.1.3. Wi-Fi Nodes
2.1.4. Mobile Mooring Station
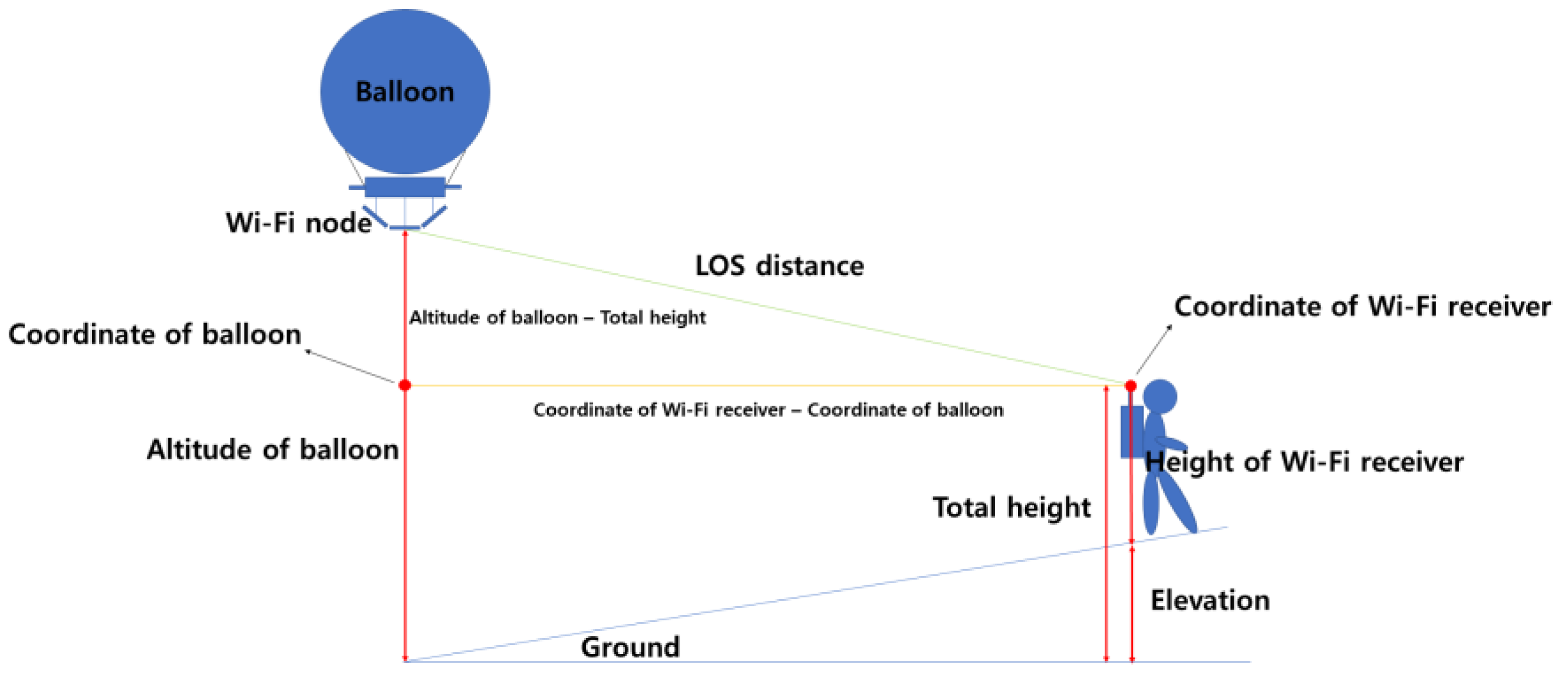
2.2. Wi-Fi RSSI Measurement System
2.2.1. Wi-Fi Receiver
2.2.2. GNSS Set
2.2.3. Data Acquisition and Analysis
2.3. System Performance Evaluation
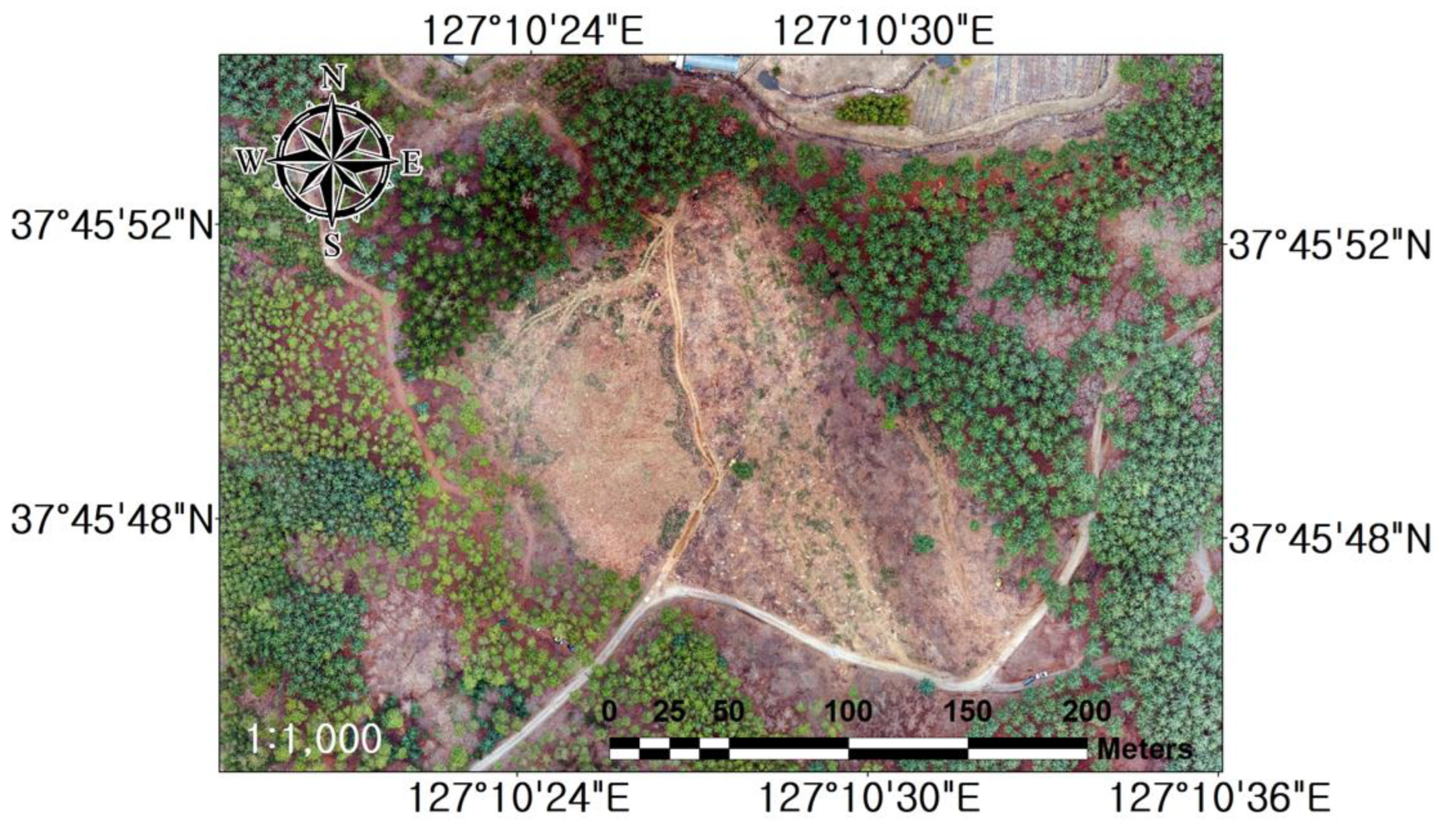
2.3.1. Study Site
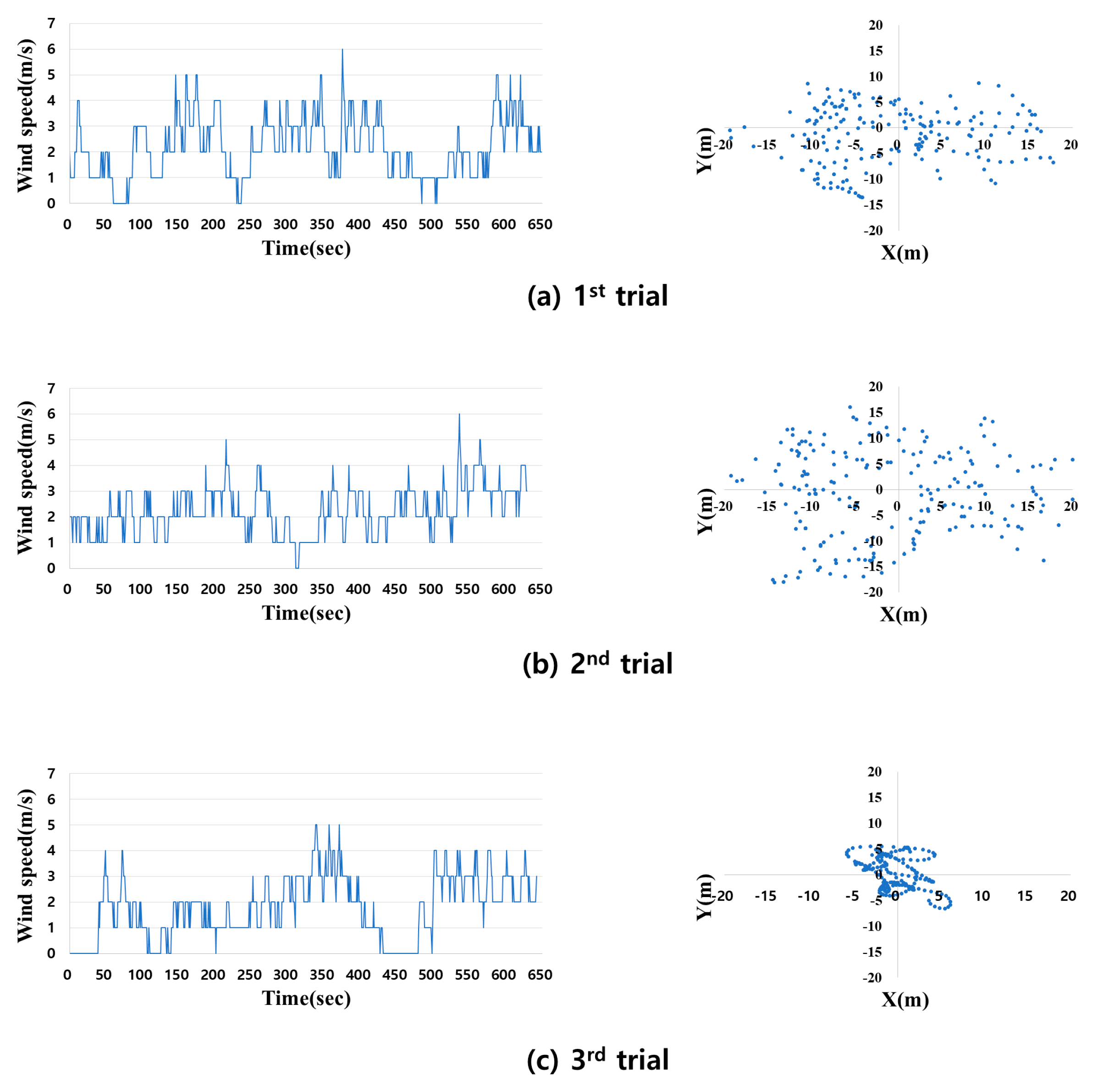
2.3.2. Meteorological Condition
2.3.3. RSSI Measurement of the Wi-Fi System
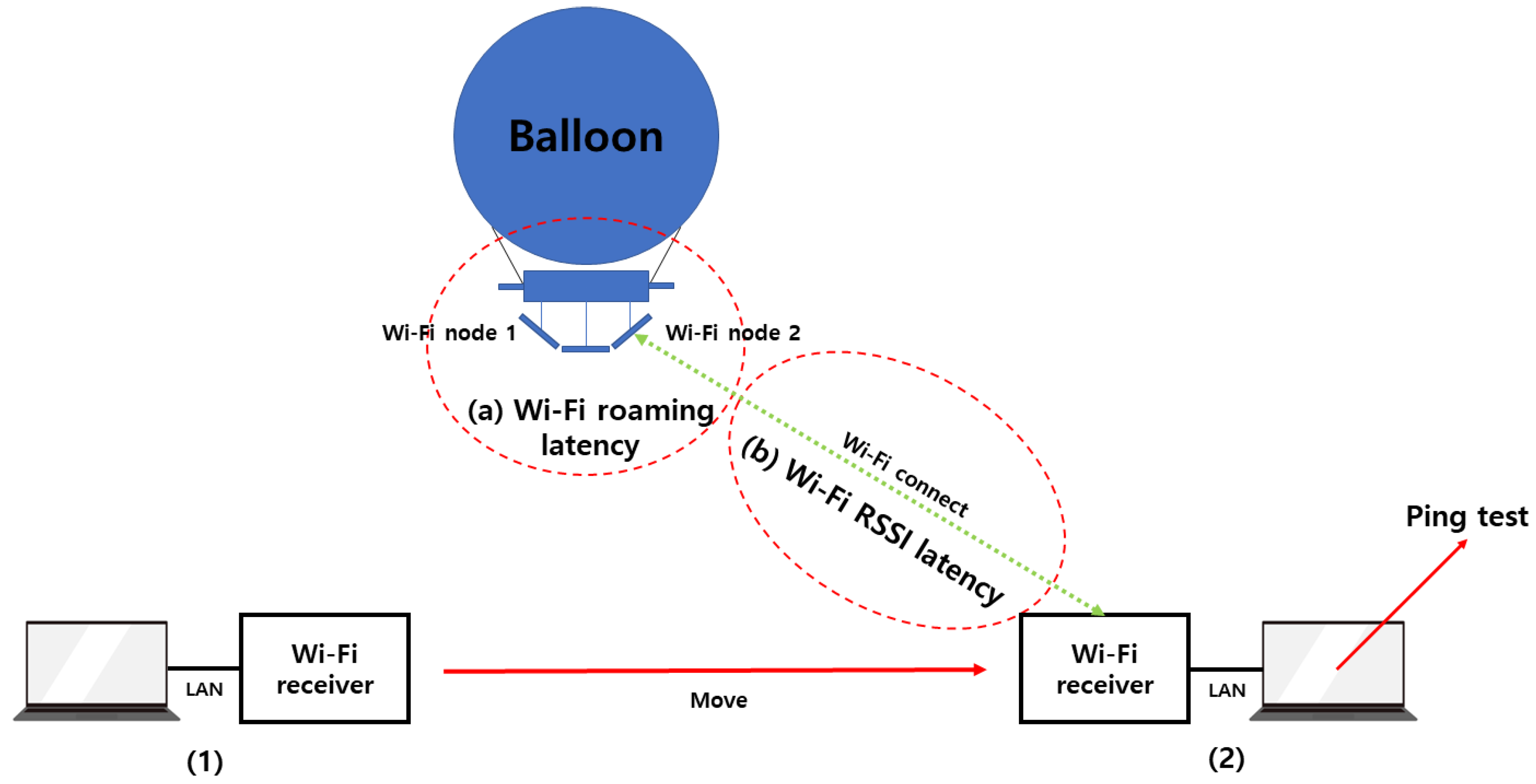
2.3.4. Latency Measurement of the Wi-Fi System
3. Results and Discussions
3.1. Wi-Fi Coverage
3.1.1. Wi-Fi RSSI for LOS Distance
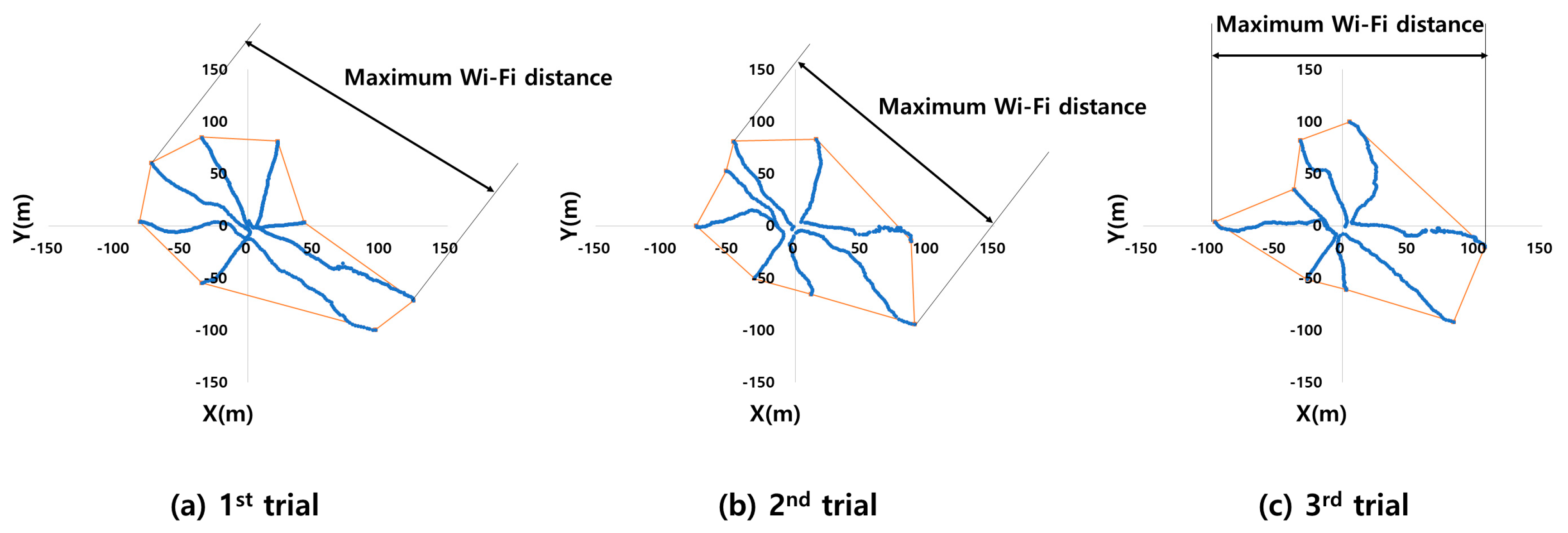
3.1.2. Wi-Fi Coverage Measurement
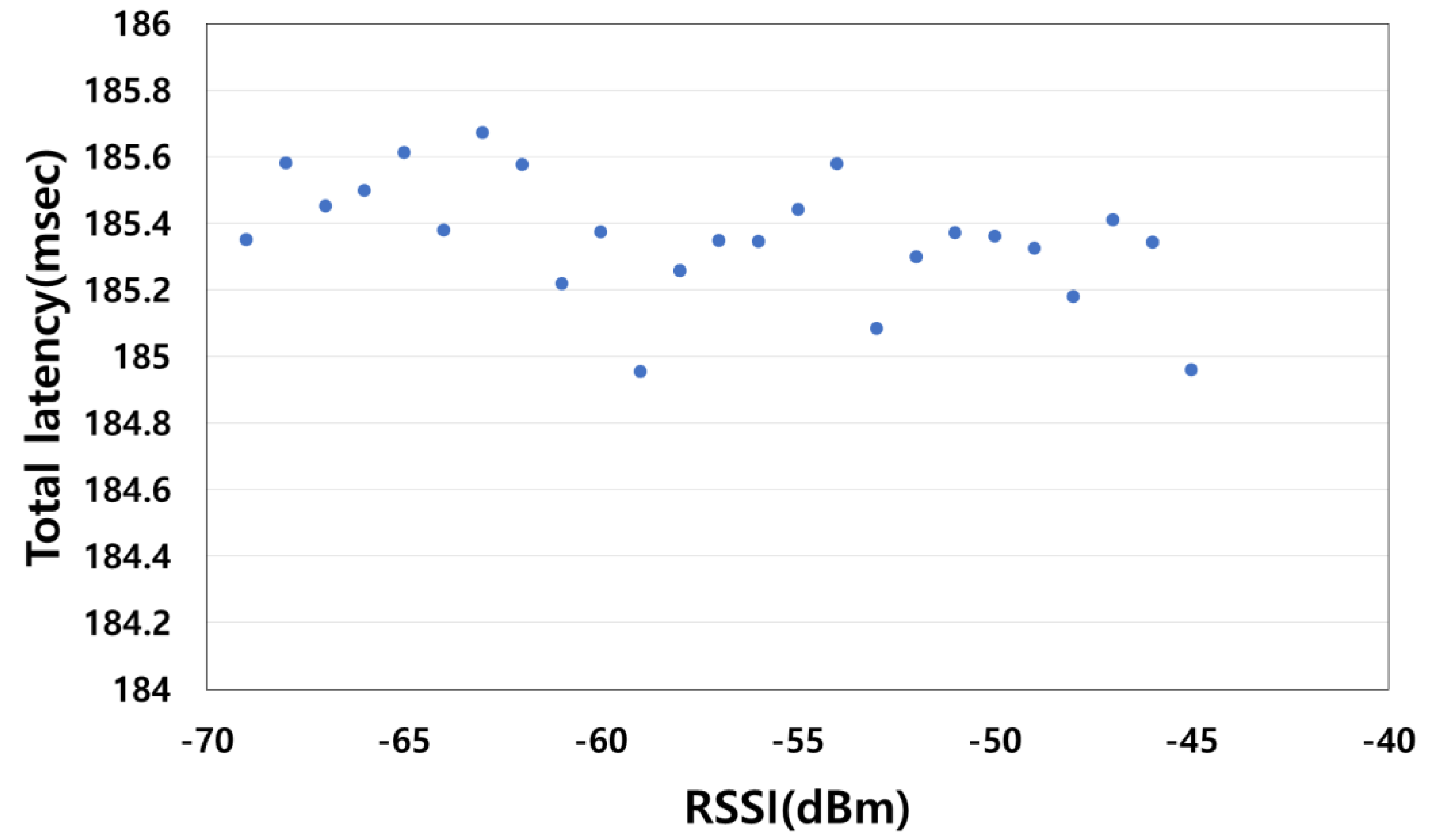
3.2. Total Latency of the Developed System
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Cho, M.-J.; Choi, Y.-S.; Mun, H.-S.; Lee, E.-J.; Eun-Jai, L.; Jung, E.-J.; Oh, J.-H.; Han, S.-K.; Kim, D.-H.; Cha, D.-S. Productivity and Costs of Felling Operation for Three Harvesting Methods in Mixed Forest Stands. J. Korean For. Soc. 2016, 105, 441–448. [Google Scholar] [CrossRef]
- Choi, Y.-S.; Cho, M.-J.; Mun, H.-S.; Kim, D.-H.; Cha, D.-S.; Han, S.-K.; Oh, J.-H. Analysis on Yarding Productivity and Cost of Tower-Yarder Based on Excavator Using Radio-Controlled Double Clamp Carriage. J. Korean Soc. For. Sci. 2018, 107, 266–277. [Google Scholar] [CrossRef]
- Maciak, A.; Kubuska, M.; Moskalik, T. Instantaneous Cutting Force Variability in Chainsaws. Forests 2018, 9, 660. [Google Scholar] [CrossRef]
- Choi, Y.-S.; Cho, M.-J.; Mun, H.-S.; Oh, J.-H. Productivity and Cost of Mechanized Felling and Processing Operations Performed with an Excavator-Based Stroke Harvester by Tree Species. J. Korean Soc. For. Sci. 2022, 111, 567–582. [Google Scholar] [CrossRef]
- Cadei, A.; Mologni, O.; Röser, D.; Cavalli, R.; Grigolato, S. Forwarder Productivity in Salvage Logging Operations in Difficult Terrain. Forests 2020, 11, 341. [Google Scholar] [CrossRef]
- Palmén, M. Nonlinear Model Predictive Control in Path Tracking and Rollover Prevention for Autonomous Forest Machines. Master’s Thesis, Aalto University, Espoo, Finland, 2023. [Google Scholar]
- Lee, J.-S.; Kim, B.-E.; Sun, D.-I.; Han, C.-S.; Ahn, Y.-H. Development of Unmanned Excavator Vehicle System for Performing Dangerous Construction Work. Sensors 2019, 19, 4853. [Google Scholar] [CrossRef] [PubMed]
- Jeong, Y.-M.; Yang, S.-Y. Development Trend of Remote Control Technology of Construction Machinery. J. Drive Control 2015, 12, 34–38. [Google Scholar]
- Cui, J.; Tosunoglu, S.; Roberts, R.; Moore, C.; Repperger, D.W. A Review Of Teleoperation System Control. In Proceedings of the Florida Conference on Recent Advances in Robotics, FCRAR, Boca Raton, FL, USA, 8–9 May 2003. [Google Scholar]
- Westerberg, S.; Manchester, I.R.; Mettin, U.; Hera, P.L.; Shiriaev, A. Virtual Environment Teleoperation of a Hydraulic Forestry Crane. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; IEEE: Piscataway, NJ, USA, 2008. ISBN 9781424416479. [Google Scholar]
- Milne, B.; Chen, X.; Hann, C.; Richard, P. Robotisation of Forestry Harvesting in New Zealand-An Overview. In Proceedings of the 2013 10th IEEE International Conference on Control and Automation (ICCA), Hangzhou, China, 12–14 June 2013; IEEE: Piscataway, NJ, USA, 2013. ISBN 9781467347082. [Google Scholar]
- Kim, G.-H.; Kim, K.-D.; Lee, H.-S.; Choi, Y.-S.; Mun, H.-S.; Oh, J.-H.; Shin, B.-S. Development of Wi-Fi-Based Teleoperation System for Forest Harvester. J. Biosyst. Eng. 2021, 46, 206–216. [Google Scholar] [CrossRef]
- Chopra, N.; Berestesky, P.; Spong, M.W. Bilateral Teleoperation over Unreliable Communication Networks. IEEE Trans. Control Syst. Technol. 2008, 16, 304–313. [Google Scholar] [CrossRef]
- Hakim, G.P.N.; Habaebi, M.H.; Toha, S.F.; Islam, M.R.; Yusoff, S.H.B.; Adesta, E.Y.T.; Anzum, R. Near Ground Pathloss Propagation Model Using Adaptive Neuro Fuzzy Inference System for Wireless Sensor Network Communication in Forest, Jungle and Open Dirt Road Environments. Sensors 2022, 22, 3267. [Google Scholar] [CrossRef]
- Singh, Y. Comparison of Okumura, Hata and COST-231 Models on the Basis of Path Loss and Signal Strength. Int. J. Comput. Appl. 2012, 59, 975–8887. [Google Scholar] [CrossRef]
- Yun, Z.; Omaki, N.; Iskander, M.F. Ridge Feature Extraction and Effect on Radio Propagation for Wireless Communications. In Proceedings of the 2012 IEEE International Symposium on Antennas and Propagation, Chicago, IL, USA, 8–14 July 2012; IEEE: Piscataway, NJ, USA, 2012. ISBN 9781467304627. [Google Scholar]
- Wang, Q.; Li, W.; Yu, Z.; Abbasi, Q.; Imran, M.; Ansari, S.; Sambo, Y.; Wu, L.; Li, Q.; Zhu, T. An Overview of Emergency Communication Networks. Remote Sens. 2023, 15, 1595. [Google Scholar] [CrossRef]
- Son, S.-H.; Gang, J.-H.; Park, G.-J. Overview and Issues of Drone Wireless Communication. Inf. Commun. Mag. 2016, 33, 93–99. [Google Scholar]
- Bilaye, P.; Gawande, V.N.; Desai, U.B.; Raina, A.A.; Pant, R.S. Low Cost Wireless Internet Access for Rural Areas Using Tethered Aerostats. In Proceedings of the 2008 IEEE Region 10 and the Third international Conference on Industrial and Information Systems, Kharagpur, India, 8–10 December 2008; IEEE: Piscataway, NJ, USA, 2008. [Google Scholar]
- Hartley, R.J.a.L.; Henderson, I.L.; Chris Lewis, J. BVLOS Unmanned Aircraft Operations in Forest Environments. Drones 2022, 6, 167. [Google Scholar] [CrossRef]
- Alzidaneen, A.; Alsharoa, A.; Alouini, M.-S. Resource and Placement Optimization for Multiple UAVs Using Backhaul Tethered Balloons. IEEE Wirel. Commun. Lett. 2020, 9, 543–547. [Google Scholar] [CrossRef]
- Zhang, S.; Liu, W.; Ansari, N. On Tethered UAV-Assisted Heterogeneous Network. IEEE Trans. Veh. Technol. 2022, 71, 975–983. [Google Scholar] [CrossRef]
- Belmekki, B.E.Y.; Alouini, M.-S. Unleashing the Potential of Networked Tethered Flying Platforms: Prospects, Challenges, and Applications. IEEE Open J. Veh. Technol. 2022, 3, 278–320. [Google Scholar] [CrossRef]
- Cho, M.-J.; Choi, Y.-S.; Mun, H.-S.; Oh, J.-H. Comparison of the Timber Harvesting Productivity and Cost of Single-Operation Using a Forestry Combi-Machine Versus Multi-Operation Using a Tower-Yarder and Processor. J. Korean Soc. For. Sci. 2022, 111, 583–593. [Google Scholar] [CrossRef]
- Qiantori, A.; Sutiono, A.B.; Hariyanto, H.; Suwa, H.; Ohta, T. An Emergency Medical Communications System by Low Altitude Platform at the Early Stages of a Natural Disaster in Indonesia. J. Med. Syst. 2010, 36, 41–52. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Almalki, F.A.; Ma, O.; Ansari, M.S.; Angelides, M.C. Performance Optimization of Tethered Balloon Technology for Public Safety and Emergency Communications. Telecommun. Syst. 2020, 75, 235–244. [Google Scholar] [CrossRef]
- Park, E.; Lee, M.S.; Kim, H.S.; Bahk, S. AdaptaBLE: Adaptive Control of Data Rate, Transmission Power, and Connection Interval in Bluetooth Low Energy. Comput. Netw. 2020, 181, 107520. [Google Scholar] [CrossRef]
- Pauca, O.; Lazar, R.G.; Postolache, M.; Caruntu, C.F. DMPC-Based Control Solution for Mobile Robots Platoon Based on ZigBee Communication. Comput. Electr. Eng. 2024, 120, 109755. [Google Scholar] [CrossRef]
- Kaur, G.; Balyan, V.; Gupta, S.H. Experimental Analysis of Low-Duty Cycle Campus Deployed IoT Network Using LoRa Technology. Results Eng. 2024, 23, 102844. [Google Scholar] [CrossRef]
- Akhter, Z.; Bilal, R.M.; Telegenov, K.; Feron, E.; Shamim, A. Indigenously Developed HD Video Transmission System for UAVs Employing a 3 × 3 MIMO Antenna System. IEEE Open J. Antennas Propag. 2022, 3, 940–947. [Google Scholar] [CrossRef]
- Wu, D.; Negi, R. Effective Capacity: A Wireless Link Model for Support of Quality of Service. IEEE Trans. Wirel. Commun. 2003, 2, 630–643. [Google Scholar] [CrossRef]
- Heikkilä, R.; Vermeer, M.; Makkonen, T.; Tyni, P.; Mikkonen, M. Accuracy Assessment for 5 Commercial RTK-GNSS Systems Using a New Roadlaying Automation Test Center Calibration Track. In Proceedings of the ISARC 2016—33rd International Symposium on Automation and Robotics in Construction, Auburn, AL, USA, 18–21 July 2016; International Association for Automation and Robotics in Construction (IAARC): Eindhoven, The Netherlands, 2016; pp. 812–817. [Google Scholar]
- Rajankumar, P.; Nimisha, P.; Kamboj, P. A Comparative Study and Simulation of AODV MANET Routing Protocol in NS2 & NS3. In Proceedings of the 2014 International Conference on Computing for Sustainable Global Development (INDIACom), New Delhi, India, 5–7 March 2014; IEEE: Piscataway, NJ, USA, 2014. ISBN 9789380544120. [Google Scholar]
- Brunnström, K.; Dima, E.; Andersson, M.; Sjöström, M.; Qureshi, T.; Johanson, M. Quality of Experience of Hand Controller Latency in a Virtual Reality Simulator. Electron. Imaging 2019, 31, art00012. [Google Scholar] [CrossRef]
- Ma, S.; Chou, Y.C.; Zhao, H.; Chen, L.; Ma, X.; Liu, J. Network Characteristics of LEO Satellite Constellations: A Starlink-Based Measurement from End Users. In Proceedings of the IEEE INFOCOM 2023-IEEE Conference on Computer Communications, New York, NY, USA, 17–20 May 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–10. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wireless Communication Type | Data Rate |
|---|---|
| Bluetooth | 2 Mbps |
| Zigbee | 250 Kbps |
| LoRa | 0.44 Kbps |
| Wi-Fi | 10 Mbps |
| Diameter | Volume | Instrument Weight | Lifting Force | Material |
|---|---|---|---|---|
| 4.2 m | 38.77 m3 | 130 N | 417 N | Teflon polyurethane |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, G.-H.; Lee, H.-S.; Mun, H.-S.; Oh, J.-H.; Shin, B.-S. Construction of a Wi-Fi System with a Tethered Balloon in a Mountainous Region for the Teleoperation of Vehicular Forestry Machines. Forests 2024, 15, 1994. https://doi.org/10.3390/f15111994
Kim G-H, Lee H-S, Mun H-S, Oh J-H, Shin B-S. Construction of a Wi-Fi System with a Tethered Balloon in a Mountainous Region for the Teleoperation of Vehicular Forestry Machines. Forests. 2024; 15(11):1994. https://doi.org/10.3390/f15111994
Chicago/Turabian StyleKim, Gyun-Hyung, Hyeon-Seung Lee, Ho-Seong Mun, Jae-Heun Oh, and Beom-Soo Shin. 2024. "Construction of a Wi-Fi System with a Tethered Balloon in a Mountainous Region for the Teleoperation of Vehicular Forestry Machines" Forests 15, no. 11: 1994. https://doi.org/10.3390/f15111994
APA StyleKim, G.-H., Lee, H.-S., Mun, H.-S., Oh, J.-H., & Shin, B.-S. (2024). Construction of a Wi-Fi System with a Tethered Balloon in a Mountainous Region for the Teleoperation of Vehicular Forestry Machines. Forests, 15(11), 1994. https://doi.org/10.3390/f15111994