Abstract
Precision forestry is a useful technique to help forest stakeholders with proper sustainable forest management. Modern sensors and technologies, with special reference to the sustainability of forest operations, can be applied on a variety of levels, including the monitoring of forest activities regarding the three pillars (economy, environment, and society). In this review, we summarised the current level of knowledge regarding the use of precision forestry techniques for monitoring forest operations. We concentrated on recent data from the last five years (2019–2023). We demonstrated how an Industry 4.0 strategy for remote and proximal monitoring of working performance can be effective when using CAN-bus and StanForD data collected by modern forest machines. The same information can be effectively used to create maps of soil trafficability and to evaluate the patterns of skid tracks or strip roads built as a result of forest intervention. Similar information can be gathered in the case of small-scale forestry by using GNSS-RF (Global Navigation Satellite Systems—Radio Frequency) or even monitoring systems based on smartwatches or smartphones. LiDAR and Structure for Motion (SfM) photogrammetry are both useful tools for tracking soil rutting and disturbances caused by the passage of forest machinery. SfM offers denser point clouds and a more approachable method, whereas laser scanning can be considerably faster but needs a more experienced operator and better data-processing skills. Finally, in terms of the social component of sustainability, the use of location sharing technologies is strongly advised, based for instance on GNSS—RF to monitor the security of forest workers as they operate.
1. Introduction
The execution of Sustainable Forest Operations (SFOs) is one of the most crucial factors to consider when aiming to achieve Sustainable Forest Management (SFM) [1,2,3,4,5], a core objective of the European Forest Strategy [6]. The concept of SFOs refers to using logging practices that are economically affordable, have little impact on the environment, and ensure the safety of operators while working [7,8]. The application of modern technologies, such as GIS (Geographic Information Systems), GNSS (GNSS (Global Navigation Satellite Systems), UAVs (Unmanned Aerial Vehicles), and various sensors, to improve the overall sustainability of forest management defines the paradigm of precision forestry [9,10]. The utilisation of these modern technologies, nowadays often already implemented within modern forest machines, allows us to generate optimal harvesting results while consuming less energy, protecting the environment, and safeguarding the health of the operator [11,12].
The term precision forestry denotes a multidisciplinary and inter-disciplinary concept that enables the integrated use of emerging technology in finding creative solutions for particular contexts in the forest sector [13]. Indeed, considering the great multidisciplinarity that characterises the forest sector, there is a plethora of applications of different smart technologies in the framework of precision forestry. Satellites or UAVs can be used to estimate aboveground biomass during the establishment of forest inventories [14,15] or to monitor disturbances such as pests or drought [16,17,18]. Geographic Information Systems can be applied to the planning of harvesting operations, for instance by selecting the most appropriate extraction system [19,20], by defining a priori optimised skid trail networks [19,21,22], or by developing soil trafficability maps [23,24,25,26]. Some efforts have also been focused on forestry robotics and automatisation of harvesting operations, although the current level is one of research and ideas rather than one of real-world implementation [27].
A further fundamental task that modern and smart technologies can perform in the framework of precision forestry is monitoring harvesting operations. Proper monitoring is indeed the base for sustainability [28,29]. Modern sensors and technologies can be applied to monitor forest operations under all three pillars (economy, environment, and society), and in this review we aim to precisely summarise the recent advances in the topic of monitoring the sustainability of forest operations by smart and modern technologies. Concerning the economic pillar, one of the most investigated topics has been the monitoring of work productivity in harvesting operations [30], with the goal of optimising the cost-effectiveness of the intervention. Regarding environmental sustainability, large efforts have been spent on monitoring soil disturbances via modern technologies, with the double goal of reducing the time spent on field surveys and improving the reliability of the obtained data [31]. Finally, regarding social sustainability, the most investigated topic has been the monitoring of working crews in the forest environment with the goal of preventing work accidents [32].
This review is addressed to scientists, researchers, and scholars in the forest engineering sector and students that wish to become familiar with the topic of monitoring the overall sustainability of forest operations via the precision forestry approach. Considering the very rapid technological advances in the topic, we focused on a short time span (2019–2023), with the goal of reporting to the readers the newest advances in the field and promoting knowledge and future developments in the sector.
2. Materials and Methods
To build the database of papers to be used for the review, we followed an unconventional approach to improving the effectiveness of the literature search process on such a specific topic. We started our literature search from the databases of specific scientific journals on the topic of forest engineering, namely: the Croatian Journal of Forest Engineering, the International Journal of Forest Engineering, the European Journal of Forest Engineering, and Forests (Forest Operations and Engineering Section). As previously stated, we considered only papers published in the period from 2019 to 05/2023. We then applied the snowball approach, which consists of looking for further literature sources starting from the reference lists of recent publications to identify further references. In this way, we obtained the database for our review, which consists of 34 papers.
The papers in the database were categorised according to the pillar of sustainability to which they referred, namely monitoring of economic sustainability, environmental sustainability, or social sustainability of forest operations. While environment and economy showed a very similar percentage of studies, those dealing with the monitoring of societal sustainability via smart technologies were less represented (Figure 1). Concerning the share of papers among different countries, the highest number of studies were carried out in the USA, but a high percentage were performed in Italy, Turkey, and Scandinavian countries as well (Figure 2).
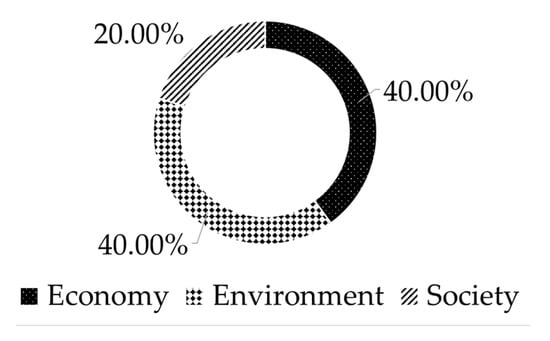
Figure 1.
Share of the papers in the database among the three pillars of sustainability.
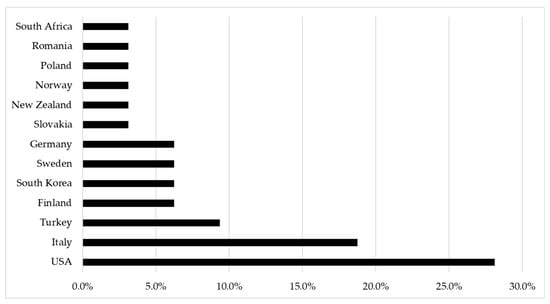
Figure 2.
Share of the papers in the database among countries.
3. Harvesting Systems Usually Applied in the Investigated Countries
The highest number of papers in the database for this review were from the USA. Considering the high variability of forestry contexts present in that country, the harvesting systems generally applied also vary substantially within the USA. In the eastern hardwood region, where the terrain conditions do not favour the applicability of Cut-to-Length (CTL) technology such as harvesters and forwarders, the most-applied harvesting system consists of motor-manual felling using chainsaws with extraction via cable skidders [33]. In the Southwest, where pine stands are dominant, the most common system is a fully mechanised one, based on feller–bunchers and extraction via grapple skidder [34,35]. Finally, in the western USA, where slopes are generally steeper than 40%, cable yarding is the most-applied extraction system [33,36].
Italy and Turkey were also well represented in the database. In Italy, concerning felling and processing, the chainsaw is still the most common machinery [37,38]. Concerning extraction operations, cable yarding is the most-applied harvesting systems in the northern Alps, while in the rest of the country, ground-based extraction based on forestry-fitted farm tractors equipped with winches or forwarding boxes is still very common [39]. Skidders and forwarders have started to be widespread only in recent years [11,40,41]. In Turkey as well, felling and processing are mainly motor-manual using chainsaws, and extraction is based on skidding, generally via forestry-fitted farm tractor [42].
In Scandinavian countries such as Sweden and Finland, CTL technology is largely dominant, with harvesters and forwarders extensively used to manage the large extensions of coniferous stands [43]. In central Europe, in countries such as Poland, Slovakia, and Germany, CTL technology is largely applied in coniferous stands, while skidding via cable or grapple skidders is very common in the management of broadleaf forests [40].
In South Korea, the cut-to-length harvesting system is the most commonly applied; however, it relies generally on non-forest-specific machinery, such as for instance excavators with a grapple [44]. Cable yarding is also common in mountain conditions [44]. In New Zealand, cable yarding is the most common harvesting system, given the usually steep terrain [45]. In recent years in this country, the application of winch-assisted harvesting has also been increasing in order to maximise work productivity in the presence of difficult mountain conditions [46].
Finally, in South Africa, forest management is mostly based on artificial plantations of Eucalyptus and Pinus genera; in recent years, mechanisation has strongly entered in the forest management in that country [47]. Harvesting systems are generally fully mechanised, even if it is common to adapt different machinery to forestry (for example, excavators) rather than relying on machines specifically developed for forest operations (e.g., harvesters) [48].
Different harvesting systems have different potential to be integrated with smart technologies. It is obvious that harvesting systems based on modern machinery, such as the Scandinavian CTL, are better suited to precision forest harvesting, given that new forwarders and harvesters are already installed with on-board computer system software and sensors for the monitoring of the harvesting activities. The same applies, however, to modern skidders and cable yarders. The integration of precision forest harvesting and smart technologies in the case of older machinery can be more difficult but still possible using different devices such as, for instance, smartphones or smartwatches.
4. Monitoring Economic Sustainability of Forest Operations
Valid instruments for forest management to ensure the traceability of forest products [49,50] as well as validate theoretical models regarding forest harvesting systems and efficiency [51] are made possible by the increasing performance of data acquisition, processing, and transmission brought on by new technological advancements (Industry/Forestry 4.0) and the application of the principle of Precision Forestry (PF) [52,53]. With the use of this technology, decision-makers can characterise wood resources in detail, including their geographical characteristics and stand factors. These data platforms or the usage of new harvesting equipment outfitted with this technology allow for the uploading of all data continuously gathered during normal working conditions as well as the option to request it as needed [54]. Therefore, it is usually possible to automatically record all the data related to the machine parameters as well as the characteristics of the harvested timber, such as metrics, species, or position, from the stand to the roadside, when a fully mechanised harvesting system with modern machines is applied [55]. It is moreover possible to view these data (fuel consumption, productivity, and position) online using the portal offered by the manufacturer. All these applications are made possible by the Controller Area Network (CAN-bus) system, which transmits machine status and parameters to the on-board computer (OBC) using the Standard for Forest Machine Data and Communication (StanForD), which is implemented in almost all contemporary forest harvesters and processors to record not only the machine engine and vehicle condition but also the parameters of the harvesting and felling operations [56]. As a result, modern forest machine automation data travel across a CAN-bus network that links all relevant components, including actuators, sensors, and controllers, to create a distributed control system. Hundreds of signals pertaining to harvester head performance and control, vehicle engine, and transmission operation and production parameters are continuously produced and processed by the control system [52]. The forest machine on-board control system, which also generates standard production and performance statistics based on measurements taken while working, serves as a conduit for communication between the control system and the human operator. Forest contractors can also track every vehicle from a single place utilizing the Fleet Management System (FMS) and CAN-bus technology in conjunction with Geographic Information Systems (GIS) [57]. The Fleet Management System makes it possible to maximise technical efficiency, boost productivity, and enhance vehicle and driver safety for a company. Usually, a combination of vehicle tracking (GNSS position), reporting on fuel use, monitoring driver conduct, and managing vehicle maintenance is used to achieve this. Additionally, the Fleet Management System can be used to more thoroughly investigate various facets of forest operations, including those connected to environmental performance (fuel consumption and CO2 emissions, among others), which become more and more relevant for both contractors and forest managers every day [58,59,60]. StanForD data can also be integrated with local allometric equations for the real-time monitoring of aboveground biomass and for the estimation and quantification of harvesting residues [61]. An example of StanForD data integrated with local topographic maps and with the OBC system of a forwarder is given in Figure 3.
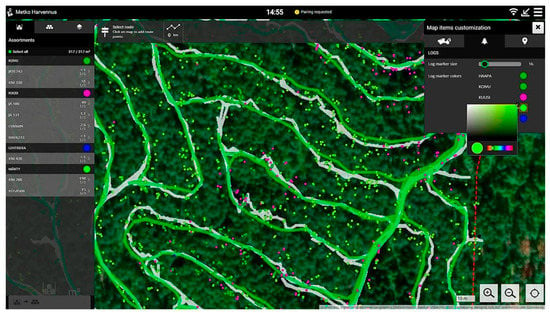
Figure 3.
An image of the OBC system of a forwarder. The green and purple dots represent the location of the wood piles to be extracted, green lines represent the suggested skid trails network, and the grey ones the actual paths established by the machine.
When CAN-bus systems are not available because the forest operations are carried out in the framework of small-scale forestry, therefore not using modern dedicated forest machinery, it is however possible to develop monitoring systems of working activity by using GNSS-RF (GNSS—radio frequency) systems or smartwatch/smartphone sensors [62]. GNSS-RF systems can collect and share positional data in real-time in off-grid remote locations where cellular and internet connectivity are otherwise unavailable [63]. In a recent study by Becker and Keefe [64], a GNSS-RF monitoring system was used to check the working performance of an excavator-based mastication operation in the USA. The system was based on two GNSS-RF transponders, one located on the boom and the other within the cabin, and it showed very good performance in identifying productive elements and delay time, with an accuracy of 95% [64]. A monitoring system based on GNSS was tested also in Italy and New Zealand to evaluate the performance of cable yarding operations, working on four study sites in Italy (selective thinning in Norway spruce stands) and four sites in New Zealand (clear-cut in radiata pine stands); the system was able to identify 361 of 368 working cycles with a less than 1% difference in gross working time in comparison to a typical time and motion study by chronometer [65]. Data on 7 working cycles were missing after losing the GNSS signal in one of the Italian sites [65]. Similarly, cable yarding operations in Romania were monitored via a GNSS system, the data from which were analysed by machine learning algorithms to classify the working times, reaching a very high accuracy ranging from 98.4% to 98.8% [66]. GNSS technology based on more user-friendly devices such as smartphones and smartwatches was tested as well with the aim of monitoring the working productivity of forest operations. These systems reached a working time prediction accuracy ranging from 65.9% to 99.6%, thus demonstrating their reliability in monitoring small-scale forest operations [67,68,69], even if the main limitation, as it often happens when applying GNSS in a forest environment, is signal loss due to canopy occlusion [70,71]. GNSS use in forestry is frequently impacted by multi-pathing error, which is caused when satellite signals are reflected or diffracted by surrounding objects or surfaces or blocked by the canopy or other solid objects [63,72,73]. This problem remains unsolved, even when applying correction algorithms such as real-time kinematics, which are generally able to improve the position accuracy even at a sub-centimetric level, but only in the presence of good satellite coverage [74]. For this reason, improving the accuracy of GNSS positioning in forest environments is considered the main challenge to be solved to achieve the automatization of forest operations [74].
Another monitoring system for forwarding extraction was recently developed by Civitarese et al. [75]. It consists of a weighing system installed on the loading deck of the machine to evaluate extracted biomass in each working cycle, coupled with a GNSS handheld receiver with a dedicated app installed, designed to use the Android platform. The system can record working time and work productivity as well as the strip roads pattern followed by the forwarder [75]. This system can be particularly helpful for monitoring forwarding operations performed by older models not equipped with CAN-bus and on-board computer systems (Figure 4). This aspect is particularly relevant in different parts of the world, including in well-developed countries such as for instance the USA and Italy; it is common that logging companies relies on old machinery in which modern on-board computing systems are not available [76]. Systems such as that proposed by Civitarese et al. [75] are very important in this framework, being able to transfer the precision forest harvesting approach to the context of small-scale forestry as well. Similar results can also be obtained via simple smartphones and smartwatches, even if in this case it is not possible to monitor the biomass harvested in each working cycle. Working time can indeed be monitored via a plethora of apps available for smartphones or, by the same token, for smartwatches, but the harvested biomass has to be estimated by the logger or weighed at the landing site if a scale is available (this situation is not so common in the majority of forest yards).

Figure 4.
Old forwarder model not equipped with modern CAN-bus, small-scale monitoring systems such as the one developed by Civitarese et al. [75] can be particularly helpful when working with this kind of machinery.
The possibility of using smart technologies for monitoring forest operations is a fundamental advance in the framework of forest engineering, considering that a proper assessment of economy of forest interventions can be a difficult task. Thanks to the large amount of precise data obtained via the above-described systems, precise pricing for new expenditures can be supported by detailed machine data capture of economic variables within a forest enterprise [52]. Furthermore, with the use of these technologies, decision-makers can describe wood resources in great detail, including their geographical characteristics and forest factors and it will be possible to create precise models that can be used in various simulations that seek to identify new, more productive operative methods, to optimise whole operations, or to create more productive machines [77].
5. Monitoring Environmental Sustainability of Forest Operations
When dealing with the monitoring of environmental impacts related to forest operations, one of the main concerns is without any doubt disturbances to the soil after harvesting activities are carried out with ground-based systems [78,79,80]. As a natural consequence, scientific research in the framework of precision forestry has been trying to look for alternative solutions to the classic monitoring via soil sampling and rutting measurement, given that these approaches require a certain amount of resources [31].
CAN-bus and StanForD data can also be effectively applied to monitoring soil disturbances related to the passage of forest machinery, particularly to defining skid trails or strip road patterns and therefore the percentage of the cutting block affected by soil disturbances [81]. A particularly interesting application of CAN-bus data is the development of soil trafficability maps for forwarding operations. In the Cut-to-Length harvesting system implemented in harvesters and forwarders, the harvester moves into the cutting block before the forwarder, and the latter follows the strip road patterns established by the former. Given that the forwarder follows the harvester, data on power from the harvester CAN-bus system can be used to develop a trafficability map for the forwarder. This is because at a constant speed on level ground, power is expended in overcoming motion resistance, which is directly related to forwarder trafficability [57]. When compared to manual measures of rutting and penetration resistance, the CAN-bus data revealed promising results for mapping site trafficability. Using CAN-bus data to map site trafficability with such a Big Data approach is surely fascinating, considering that the expense of completely automated and thorough trafficability mapping as part of operational forestry is minimal because modern harvesters are practically prepared for indirect power recording [57].
In the recent literature, two other precision forestry approaches for the monitoring of soil disturbances after ground-based forest operations can be found; these are Structure-from-Motion (SfM) Photogrammetry and LiDAR [82,83]. Photogrammetry consists of a technique in which measurements made from one or more images are used to estimate the three-dimensional coordinates of points on a surface. The application of SfM, in which images are taken from a variety of positions and matched in an overlay to provide depth perception, permits three-dimensional modelling with a monocular camera [84]. The quality and resolution of the photos, as well as the degree of overlap between succeeding photographs (usually 70%–80%), all affect how accurate photogrammetric models are. In photogrammetry, the surface roughness of the item being modelled is crucial, and stationary water presents a challenge for the technique, frequently leading to no data representation of such surfaces [31]. LiDAR (Light Detection and Ranging) is a reliable measuring method that can pierce scant vegetation, operates regardless of lighting conditions, and is well established for both operational and research application in forest inventory and mapping [85,86,87]. Essentially, a LiDAR system measures the distance between a target and sensor and consists of both technology that uses a beam emitter and rotating mirrors to steer the beam. New developments include solid state LiDARs that have no moving parts and simultaneously evaluate multiple beams (such as Leddar Pixell) that measure distance without any moving parts [31]. LiDAR technology in forestry applications can be implemented in four different ways: Terrestrial Laser Scanning (TLS), Airborne Laser Scanning (ALS), Unmanned Aerial Vehicle Laser Scanning (UAV-LS), and Mobile Laser Scanning (MLS). TLS is a ground-based LiDAR scanning technique that uses visible or near-infrared light to measure three-dimensional (3D) forest structure [88]. The major advantage of TLS is the high accuracy of the estimation of aboveground tree biomass, even if surveying with this technique is time-consuming and can suffer from occlusion in particularly dense stands [89]. ALS consists of a LiDAR sensor mounted on a plane; it is particularly useful for detecting tree height and can cover large survey extensions, although the accuracy is much lower than TLS [90]. Unmanned aerial vehicles (UAV) fly at significantly lower altitudes of 50–300 m (ALS obtained point cloud data at a higher altitude of 500–3000 m); however, UAV-LS components are relatively similar to ALS [91]. UAV-LS is more adaptable and practical, has a higher point density, and is less expensive than ALS, although it covers less area [92,93]. MLS is instead more similar to TLS, being based on ground surveys; however, these systems allow the operator to move within the stand, while a typical TLS is fixed while acquiring data [94]. Just as reflection from bodies of water is the main concern in SfM photogrammetry, in both TLS and MLS, when applied to soil disturbance evaluation, the main challenge is the correct segmentation of the point cloud between points belonging to the soil and points belonging to other objects [95].
UAV-based photogrammetry has demonstrated the ability to detect soil displacement after the passage of forest machinery, even if only in the case of complete canopy removal after clearcutting, and not being therefore applicable in the framework of retention forestry [96]. UAV-LS also showed itself to be particularly efficient in detecting rutting on the strip roads after clearcutting with a flight altitude ranging from 60 to 120 m. The authors of the publication stated that the results from the UAV-LS survey are equivalent to manual measurement of rutting depth [97].
Both SfM photogrammetry and MLS showed satisfactory results in the measurement of rutting and soil displacement [98,99]. Both techniques were used by Marra et al. [98] to assess soil rutting after the passage of the same forestry-fitted farm tractor while skidding and forwarding logs; for both extraction techniques there were no significant differences between the results obtained via SfM and MLS. In this study, the SfM images were collected via an RGB reflex camera mounted on a tripod 3 m in height with an angle of 45°, and ground control points were used to georeference the obtained images in a local reference system; the 3D soil model was obtained starting from the input images by using a dedicated software [98]. Concerning MLS, a 2D laser scanner combined with an inertial measurement unit (IMU) was used to scan the trails with ground control points used to georeference the images in a local reference system [98]. The operator walked slowly (about 30 cm s−1) while holding and oscillating the instrument at chest height (1.40 m above ground) to capture data in the plots. Walking in straight lines (spaced 0.5 m apart) throughout the whole plot surface allowed for the coverage of the route inside the plot area [98].
The two techniques present relative advantages and disadvantages. Photogrammetry can provide an almost twice as dense point cloud and a homogeneous distribution of points, which is impossible for MLS, given that the density of points is at maximum when closer to the LiDAR sensor and decreases with increasing distance of the target object [100]. Additionally, while utilizing MLS, the data check process cannot be performed in the field because a computer is required. With photogrammetry, it is instead possible to verify on the camera screen that the acquired images are of high quality and that the GCPs are correctly included, covering the studied plot as planned, easily and quickly identify and correct errors during data collection. This eliminates the need to conduct any additional field surveys in case of errors, as may occur when using MLS [98]. On the other hand, data acquisition time with MLS is much more rapid than with photogrammetry. Eker reported 30 min for an MLS survey on a 120 m unpaved forest road established in 2021 in eastern Turkey, whereas to perform the same task with photogrammetry, up to two hours were needed [99]. MLS is a more complex technique than photogrammetry, and therefore the skill of the operator is a crucial parameter; indeed, it is important to keep the instrument in the same direction during scanning, to allow the SLAM (Simultaneous localisation and mapping) algorithm to perform reliable positioning of the point cloud [99]. Another important aspect to be considered is that with MLS relying on SLAM, it is essential to start and close the survey at the same point so as to facilitate the positioning of the point cloud by SLAM [101].
It is important to highlight the fact that rutting assessment using MLS is generally carried out after creating two Digital Terrain Models (DTM) by interpolating the point cloud, one before and one after the passage of the machine, and then applying the map-algebra to calculate the differences between the two DTMs. Eker [99] proposed instead a different approach based on the M3C2 algorithm, already integrated as plugin in the reference open-source software for point cloud elaboration, namely CloudCompare [102]. The advantage of M3C2 algorithm consists in its ability to determine changes in complex topography directly on point clouds, without meshing or gridding [103].
6. Monitoring Social Sustainability of Forest Operations
The job of a forest operator is certainly among the most dangerous types of work in the world [104,105], and therefore ensuring the safest possible working conditions for forest workers is crucial to achieving full sustainability in forest operations. In comparison to environmental and economic sustainability, the application of precision forestry for the monitoring of operator safety has been less investigated in the recent literature. One application of modern technology in operator safety is the utilisation of Location Sharing (LS) devices. The use of LS technology could help in injury prevention and response while also improving team situational awareness during logging operations. For example, LS devices with help alert features would enable isolated people to warn co-workers or off-site response agencies of a crisis. Automatic location updates may be useful in incapacitating situations to let co-workers know when someone might need assistance. Geographic coordinates are supplied in both situations to help with response operations. In order to prevent injuries, automatic position updates combined with geofences could improve worker awareness of their whereabouts in relation to equipment or hazardous regions [106].
LS systems can be based on GNSS-RF paired with smartphones, and these systems are often used in the USA [107]. However, it is important to highlight that, as with every precision forestry application, this system is a support tool but not a panacea for all problems. Indeed, we have to continuously be aware that GNSS in the forest environment can experience occlusion problems; for instance, in the study by Zimbelman and Keefe [107], on average the full GNSS-RF network was connected only 32.6% of the time (range: 0% to 90.5%), and the mobile radios were disconnected from all other devices 18.2% of the time (range: 0% to 44.5%). Therefore, such systems can help to monitor working operations, but every forest operator, even if equipped with this system, should continue to maintain a high level of attention while performing his/her tasks while also monitoring the situations of his/her co-workers to prevent possible accidents and act quickly in the case of injuries.
It is worthwhile to also discuss some other beneficial effects of smart technologies towards the social sustainability of logging. As previously mentioned, being a logger is still a dangerous and physically stressful job, and in many countries the attractiveness of this job is decreasing, thus raising the issues of who will be the loggers in the future [108]. Extending the applicability of mechanised harvesting, which is able to also guarantee safer and more comfortable working conditions in steeper terrain and in a wide variety of stands, is a sure determinant to attract young people to a logging career [109]. However, modern technology can also play a significant role, for instance in the application of augmented reality in logger training. Thanks to this technology, non-expert loggers can learn how to operate a specific type of machine safely and without running the risk of damaging it. This method makes it possible to shorten learning timeframes, allow for training errors that would be highly risky under real-world circumstances, and teach operators to become comfortable with the equipment even under complicated conditions. This could also play a positive role in increasing the willingness of young people to embark on the career of logger.
Safety monitoring of tree stability and cable tension is another sector in which smart technology can make a strong contribution. Trees and their stumps are typically used as anchoring materials in traditional cable-supported forest operations to withstand strong lateral stresses [110]. These loads are distinguished by increased magnitude and dynamic amplification effects, even when applied close to the stem base where the cross-section is larger. As a result, stem fracture or overturning could cause an anchor to fail. In a study carried out in northern Italy, authors used modern low-cost sensors generally used in tree stability assessment to evaluate the resistance of individual Norway spruce in a forest stand [111]. The findings suggested that tree failure is possible with tension forces close to the ones usually recorded during cable yarding, thus highlighting the importance of a proper monitoring effort not based solely on the dimension of the base of the tree selected as possible anchor [111]. In the optics of the application of winch-assisted systems for mechanised harvesting in steep terrain, monitoring cable tension is a fundamental issue in the topic of operator safety. A recent study conducted in the USA, dealing with a clear-cut performed in a 53-year-old second-growth forest composed of Douglas fir (Pseudotsuga menziesii (Mirb.) Franco) and western hemlock (Tsuga heterophylla (Raf.) Sarg.) via a tracked Tigercat LS855E equipped with a directional felling head tethered with a “DC Equipment Falcon Winch Assist” anchor machine, monitored the tension of the winch cable via a load cell connected to a data logger measuring at a frequency of 100 Hz [112]. The study revealed that the highest tension peak was detected when moving the harvesting machinery downhill, even if the tensile force never exceeded the safety threshold [112]. The application of this kind of sensor demonstrated its great suitability for monitoring tensile force in winch-assisted logging, thus ensuring safe working conditions for loggers. A similar approach with consistent results was applied to the monitoring of a skyline system t several working sites in the Italian Alps, consisting of clear-cut or retention harvesting interventions in coniferous plantations [113,114].
Accelerometer sensors can be used as well for monitoring machine tilt and its relation to terrain slope, thus monitoring the working conditions in steep terrains when working with mechanised systems and giving information to the operator when the machine is to face different terrain conditions which can lead to accidents [115]. Wheel slippage can also be monitored via incremental rotary encoders sensors as in the study by Schönauer et al. [116], who detected a reduction of wheel slippage when applying winch-assisted harvesting. It is worth highlighting that monitoring wheel slippage is fundamental not only to the safety of the drivers, but also to reducing soil impacts, given that it is properly slippage that causes the highest soil compaction in the skid trails or strip roads [78,117,118].
7. Conclusions
The precision forestry approach is a valuable tool to allow forest managers to achieve sustainable forest management. With particular reference to the sustainability of forest operations, modern sensors and technologies can be helpful at different levels, including the monitoring of forest operations in terms of the three pillars of sustainability (economy, environment, and society). In this review, we summarised the state of the art on the topic of the application of precision forestry approaches in monitoring forest operations. We focused in particular on recent findings from the last five years (2019–2023).
We showed that CAN-bus and StanForD data obtained via modern forest machines can be useful for the remote monitoring of working performance with an Industry (/Forestry) 4.0 approach. The same data can be efficiently used to develop soil trafficability maps and to assess skid trails or strip road patterns established with a forest intervention. In the case of small-scale forestry, similar data can be obtained via GNSS-RF (Global Navigation Satellite Systems—Radio Frequency) or even smartwatch-based or smartphone-based monitoring systems. Structure for Motion (SfM) photogrammetry and LiDAR are both valuable options to monitor soil displacement and rutting related to the passage of forest machines. SfM provides denser point clouds and a more user-friendly approach, while laser scanning can be much faster but requires a more skilled operator and higher ability in data processing. Concerning the social aspect of sustainability, the utilisation of location-sharing systems is highly recommended to monitor the safety of forest crews while working. Additionally, the application of tension monitoring through dedicated sensors is very important for ensuring operator safety while working in cable logging.
It is essential to highlight that any precision forestry technology represents a tool to support the forest managers and not a way to replace them. The harsh working conditions and the complex environment in which forest operations take place make the presence of skilled forest engineers and operators mandatory. The tools and approaches presented in this review are therefore instruments to support the people working in the forest to enhance performance, working conditions, and results.
Author Contributions
Conceptualisation, R.V., F.L. and R.P.; methodology, R.V. and F.L.; writing—original draft preparation, R.V., F.L., V.C. and R.P.; writing—review and editing, R.V., F.L., V.C. and R.P.; supervision, R.P.; funding acquisition, V.C. and R.P. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the Italian Ministry of Agriculture (MASAF) under AGRIDIGIT project, sub-project Selvicoltura (DM N° 36509/2018).
Data Availability Statement
Being a systematic review paper, there are no data related to this publication.
Acknowledgments
This study was carried out also within the Agritech National Research Center and received funding from the European Union Next-GenerationEU (PIANO NAZIONALE DI RIPRESA E RESILIENZA (PNRR)—MISSIONE 4 COMPONENTE 2, INVESTIMENTO 1.4—D.D. 1032 17/06/2022, CN00000022). This manuscript reflects only the authors’ views and opinions, neither the European Union nor the European Commission can be considered responsible for them.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Latterini, F.; Dyderski, M.K.; Horodecki, P.; Picchio, R.; Venanzi, R.; Lapin, K.; Jagodziński, A.M. The Effects of Forest Operations and Silvicultural Treatments on Litter Decomposition Rate: A Meta-analysis. Curr. For. Rep. 2023, 1–15. [Google Scholar] [CrossRef]
- Marchi, E.; Chung, W.; Visser, R.; Abbas, D.; Nordfjell, T.; Mederski, P.S.; McEwan, A.; Brink, M.; Laschi, A. Sustainable Forest Operations (SFO): A new paradigm in a changing world and climate. Sci. Total Environ. 2018, 634, 1385–1397. [Google Scholar] [CrossRef]
- Latterini, F.; Mederski, P.S.; Jaeger, D.; Venanzi, R.; Tavankar, F.; Picchio, R. The Influence of Various Silvicultural Treatments and Forest Operations on Tree Species Biodiversity. Curr. For. Rep. 2023, 9, 59–71. [Google Scholar] [CrossRef]
- Labelle, E.R.; Hansson, L.; Högbom, L.; Jourgholami, M.; Laschi, A. Strategies to Mitigate the Effects of Soil Physical Disturbances Caused by Forest Machinery: A Comprehensive Review. Curr. For. Rep. 2022, 8, 20–37. [Google Scholar] [CrossRef]
- Vančura, K.; Šimková, M.; Vacek, Z.; Vacek, S.; Gallo, J.; Šimůnek, V.; Podrázský, V.; Štefančík, I.; Hájek, V.; Prokůpková, A.; et al. Effects of environmental factors and management on dynamics of mixed calcareous forests under climate change in Central European lowlands. Dendrobiology 2022, 87, 79–100. [Google Scholar] [CrossRef]
- European Union. New European Forest Strategy for 2030. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=CELEX:52021DC0572 (accessed on 15 August 2021).
- Schaaf, A.A.; García, C.G.; Ruggera, R.A.; Tallei, E.; Vivanco, C.G.; Rivera, L.; Politi, N. Influence of logging on nest density and nesting microsites of cavity-nesting birds in the subtropical forests of the Andes. Forestry 2022, 95, 73–82. [Google Scholar] [CrossRef]
- Hoffmann, S.; Schönauer, M.; Heppelmann, J.; Asikainen, A.; Cacot, E.; Eberhard, B.; Hasenauer, H.; Ivanovs, J.; Jaeger, D.; Lazdins, A.; et al. Trafficability Prediction Using Depth-to-Water Maps: The Status of Application in Northern and Central European Forestry. Curr. For. Rep. 2022, 8, 55–71. [Google Scholar] [CrossRef]
- Picchio, R.; Proto, A.R.; Civitarese, V.; Di Marzio, N.; Latterini, F. Recent Contributions of Some Fields of the Electronics in Development of Forest Operations Technologies. Electronics 2019, 8, 1465. [Google Scholar] [CrossRef]
- Goodbody, T.R.H.; Coops, N.C.; White, J.C. Digital Aerial Photogrammetry for Updating Area-Based Forest Inventories: A Review of Opportunities, Challenges, and Future Directions. Curr. For. Rep. 2019, 5, 55–75. [Google Scholar] [CrossRef]
- Picchio, R.; Latterini, F.; Mederski, P.S.; Tocci, D.; Venanzi, R.; Stefanoni, W.; Pari, L. Applications of GIS-Based Software to Improve the Sustainability of a Forwarding Operation in Central Italy. Sustainability 2020, 12, 5716. [Google Scholar] [CrossRef]
- Keefe, R.F.; Zimbelman, E.G.; Picchi, G. Use of Individual Tree and Product Level Data to Improve Operational Forestry. Curr. For. Rep. 2022, 8, 148–165. [Google Scholar] [CrossRef]
- Ziesak, M. Precision Forestry-An overview on the current status of Precision Forestry. A literature review. In Proceedings of the Precision Forestry in Plantations, Semi-Natural and Natural Forests; IUFRO Precision Forestry Conference Technical University: Munich, Germany, 2006; pp. 5–10. [Google Scholar]
- David, R.M.; Rosser, N.J.; Donoghue, D.N.M. Improving above ground biomass estimates of Southern Africa dryland forests by combining Sentinel-1 SAR and Sentinel-2 multispectral imagery. Remote Sens. Environ. 2022, 282, 113232. [Google Scholar] [CrossRef]
- Tian, Y.; Huang, H.; Zhou, G.; Zhang, Q.; Tao, J.; Zhang, Y.; Lin, J. Aboveground mangrove biomass estimation in Beibu Gulf using machine learning and UAV remote sensing. Sci. Total Environ. 2021, 781, 146816. [Google Scholar] [CrossRef]
- Ecke, S.; Dempewolf, J.; Frey, J.; Schwaller, A.; Endres, E.; Klemmt, H.-J.; Tiede, D.; Seifert, T. UAV-Based Forest Health Monitoring: A Systematic Review. Remote Sens. 2022, 14, 3205. [Google Scholar] [CrossRef]
- Varghese, D.; Radulović, M.; Stojković, S.; Crnojević, V. Reviewing the Potential of Sentinel-2 in Assessing the Drought. Remote Sens. 2021, 13, 3355. [Google Scholar] [CrossRef]
- Haghighian, F.; Yousefi, S.; Keesstra, S. Identifying tree health using sentinel-2 images: A case study on Tortrix viridana L. infected oak trees in Western Iran. Geocarto Int. 2022, 37, 304–314. [Google Scholar] [CrossRef]
- Picchio, R.; Latterini, F.; Mederski, P.S.; Venanzi, R.; Karaszewski, Z.; Bembenek, M.; Croce, M. Comparing Accuracy of Three Methods Based on the GIS Environment for Determining Winching Areas. Electronics 2019, 8, 53. [Google Scholar] [CrossRef]
- Blagojević, B.; Jonsson, R.; Björheden, R.; Nordström, E.; Lindroos, O. Multi-Criteria Decision Analysis (MCDA) in Forest Operations—An Introductional Review. Croat. J. For. Eng. 2019, 40, 191–2015. [Google Scholar]
- Sterenczak, K.; Moskalik, T. Use of LIDAR-based digital terrain model and single tree segmentation data for optimal forest skid trail network. iForest 2015, 8, 661–667. [Google Scholar] [CrossRef]
- Görgens, E.B.; Mund, J.-P.; Cremer, T.; de Conto, T.; Krause, S.; Valbuena, R.; Rodriguez, L.C.E. Automated operational logging plan considering multi-criteria optimization. Comput. Electron. Agric. 2020, 170, 105253. [Google Scholar] [CrossRef]
- Schönauer, M.; Väätäinen, K.; Prinz, R.; Lindeman, H.; Pszenny, D.; Jansen, M.; Maack, J.; Talbot, B.; Astrup, R.; Jaeger, D. Spatio-temporal prediction of soil moisture and soil strength by depth-to-water maps. Int. J. Appl. Earth Obs. Geoinf. 2021, 105, 102614. [Google Scholar] [CrossRef]
- Salmivaara, A.; Launiainen, S.; Perttunen, J.; Nevalainen, P.; Pohjankukka, J.; Ala-Ilomäki, J.; Sirén, M.; Laurén, A.; Tuominen, S.; Uusitalo, J.; et al. Towards dynamic forest trafficability prediction using open spatial data, hydrological modelling and sensor technology. Forestry 2021, 93, 662–674. [Google Scholar] [CrossRef]
- Schönauer, M.; Prinz, R.; Väätäinen, K.; Astrup, R.; Pszenny, D.; Lindeman, H.; Jaeger, D. Spatio-temporal prediction of soil moisture using soil maps, topographic indices and SMAP retrievals. Int. J. Appl. Earth Obs. Geoinf. 2022, 108, 102730. [Google Scholar] [CrossRef]
- Latterini, F.; Venanzi, R.; Tocci, D.; Picchio, R. Depth-to-Water Maps to Identify Soil Areas That Are Potentially Sensitive to Logging Disturbance: Initial Evaluations in the Mediterranean Forest Context. Land 2022, 11, 709. [Google Scholar] [CrossRef]
- Visser, R.; Obi, O.F. Automation and Robotics in Forest Harvesting Operations. Croat. J. For. Eng. 2021, 42, 13–24. [Google Scholar] [CrossRef]
- Usubiaga-Liaño, A.; Ekins, P. Monitoring the environmental sustainability of countries through the strong environmental sustainability index. Ecol. Indic. 2021, 132, 108281. [Google Scholar] [CrossRef]
- Čuček, L.; Klemeš, J.J.; Kravanja, Z. A Review of Footprint analysis tools for monitoring impacts on sustainability. J. Clean. Prod. 2012, 34, 9–20. [Google Scholar] [CrossRef]
- Pellegrini, M.; Ackerman, P.; Cavalli, R. On-board computing in forest machinery as a tool to improve skidding operations in South African softwood sawtimber operations. South. For. 2013, 75, 89–96. [Google Scholar] [CrossRef]
- Talbot, B.; Astrup, R. A review of sensors, sensor-platforms and methods used in 3D modelling of soil displacement after timber harvesting. Croat. J. For. Eng. 2021, 42, 149–164. [Google Scholar] [CrossRef]
- Keefe, R.F.; Wempe, A.M.; Becker, R.M.; Zimbelman, E.G.; Nagler, E.S.; Gilbert, S.L.; Caudill, C.C. Positioning Methods and the Use of Location and Activity Data in Forests. Forests 2019, 10, 458. [Google Scholar] [CrossRef]
- Keefe, R.; Anderson, N.; Hogland, J.; Muhlenfeld, K. Woody Biomass Logistics. In Cellulosic Energy Cropping Systems; John Wiley & Sons, Ltd.: Chichester, UK, 2014; pp. 251–279. ISBN 9781118676332. [Google Scholar]
- Bolding, M.C.; Kellogg, L.D.; Davis, C.T. Soil compaction and visual disturbance following an integrated mechanical forest fuel reduction operation in southwest Oregon. Int. J. For. Eng. 2009, 20, 47–56. [Google Scholar] [CrossRef]
- Bolding, M.C.; Kellogg, L.D.; Davis, C.T. Productivity and costs of an integrated mechanical forest fuel reduction operation in southwest Oregon. For. Prod. J. 2009, 59, 35–46. [Google Scholar]
- Chang, H.; Han, H.-S.; Anderson, N.; Kim, Y.-S.; Han, S.-K. The Cost of Forest Thinning Operations in the Western United States: A Systematic Literature Review and New Thinning Cost Model. J. For. 2023, 121, 193–206. [Google Scholar] [CrossRef]
- Picchio, R.; Spina, R.; Maesano, M.; Carbone, F.; Lo Monaco, A.; Marchi, E. Stumpage value in the short wood system for the conversion into high forest of a oak coppice. For. Stud. China 2011, 13, 252–262. [Google Scholar] [CrossRef]
- Latterini, F.; Venanzi, R.; Stefanoni, W.; Sperandio, G.; Suardi, A.; Civitarese, V.; Picchio, R. Work Productivity, Costs and Environmental Impacts of Two Thinning Methods in Italian Beech High Forests. Sustainability 2022, 14, 11414. [Google Scholar] [CrossRef]
- Spinelli, R.; Cacot, E.; Mihelic, M.; Nestorovski, L.; Mederski, P.; Tolosana, E. Techniques and productivity of coppice harvesting operations in Europe: A meta-analysis of available data. Ann. For. Sci. 2016, 73, 1125–1139. [Google Scholar] [CrossRef]
- Spinelli, R.; Magagnotti, N.; Visser, R.; O’Neal, B. A survey of the skidder fleet of Central, Eastern and Southern Europe. Eur. J. For. Res. 2021, 140, 901–911. [Google Scholar] [CrossRef]
- Venanzi, R.; Latterini, F.; Stefanoni, W.; Tocci, D.; Picchio, R. Variations of Soil Physico-Chemical and Biological Features after Logging Using Two Different Ground-Based Extraction Methods in a Beech High Forest—A Case Study. Land 2022, 11, 388. [Google Scholar] [CrossRef]
- Eker, M. A Review on Decision Processes for Wood Harvesting in Turkish Forestry. Eur. J. For. Eng. 2020, 6, 41–51. [Google Scholar] [CrossRef]
- Eriksson, M.; Lindroos, O. Productivity of harvesters and forwarders in CTL operations in northern Sweden based on large follow-up datasets. Int. J. For. Eng. 2014, 25, 179–200. [Google Scholar] [CrossRef]
- Korea Forest Service. Wood Utilization Survey Report; Korea Forest Service: Daejon, Republic of Korea, 2018; p. 43. [Google Scholar]
- Visser, R.; Harrill, H. Cable yarding in North America and New Zealand: A review of developments and practices. Croat. J. For. Eng. 2017, 38, 209–217. [Google Scholar]
- Holzfeind, T.; Visser, R.; Chung, W.; Holzleitner, F.; Erber, G. Development and Benefits of Winch-Assist Harvesting. Curr. For. Rep. 2020, 6, 201–209. [Google Scholar] [CrossRef]
- Ramantswana, M.; Guerra, S.P.S.; Ersson, B.T. Advances in the mechanization of regenerating plantation forests: A review. Curr. For. Rep. 2020, 6, 143–158. [Google Scholar] [CrossRef]
- Hogg, G.A.; Pulkki, R.E.; Ackerman, P.A. Multi-Stem Mechanized Harvesting Operation Analysis—Application of Arena 9 Discrete-event Simulation Software in Zululand, South Africa. Int. J. For. Eng. 2010, 21, 14–22. [Google Scholar] [CrossRef]
- Lezier, A.; Cadei, A.; Mologni, O.; Marchi, L.; Grigolato, S. Development of device based on open-source electronics platform for monitoring of cable-logging operations. In Proceedings of the Enginnering for Rural Development, Jelgava, Latvia, 22–24 May 2019; pp. 72–77. [Google Scholar]
- Kovácsová, P.; Antalová, M. Precision forestry-definition and technologies. Sumar. List 2010, 134, 603–611. [Google Scholar]
- Bont, L.G.; Fraefel, M.; Frutig, F.; Holm, S.; Ginzler, C.; Fischer, C. Improving forest management by implementing best suitable timber harvesting methods. J. Environ. Manag. 2022, 302, 114099. [Google Scholar] [CrossRef]
- Bacescu, N.M.; Cadei, A.; Moskalik, T.; Wiśniewski, M.; Talbot, B.; Grigolato, S. Efficiency Assessment of Fully Mechanized Harvesting System through the Use of Fleet Management System. Sustainability 2022, 14, 16751. [Google Scholar] [CrossRef]
- Lundbäck, M.; Häggström, C.; Fjeld, D.; Lindroos, O.; Nordfjell, T. The economic potential of semi-automated tele-extraction of roundwood in Sweden. Int. J. For. Eng. 2022, 33, 271–288. [Google Scholar] [CrossRef]
- Spencer, G.; Mateus, F.; Torres, P.; Dionísio, R.; Martins, R. Design of CAN Bus Communication Interfaces for Forestry Machines. Computers 2021, 10, 144. [Google Scholar] [CrossRef]
- Suvinen, A.; Saarilahti, M. Measuring the mobility parameters of forwarders using GPS and CAN bus techniques. J. Terramechanics 2006, 43, 237–252. [Google Scholar] [CrossRef]
- Olivera, A. Exploring Opportunities for the Integration of GNSS with Forest Harvester Data to Improve Forest Management. Ph.D. Thesis, University of Canterbury, Christchurch, New Zealand, 2016. [Google Scholar]
- Ala-Ilomäki, J.; Salmivaara, A.; Launiainen, S.; Lindeman, H.; Kulju, S.; Finér, L.; Heikkonen, J.; Uusitalo, J. Assessing extraction trail trafficability using harvester CAN-bus data. Int. J. For. Eng. 2020, 31, 138–145. [Google Scholar] [CrossRef]
- Zhang, C.; He, J.; Bai, C.; Yan, X.; Gong, J.; Zhang, H. How to Use Advanced Fleet Management System to Promote Energy Saving in Transportation: A Survey of Drivers’ Awareness of Fuel-Saving Factors. J. Adv. Transp. 2021, 2021, 1–19. [Google Scholar] [CrossRef]
- Pandur, Z.; Šušnjar, M.; Bačić, M.; Ðuka, A.; Lepoglavec, K.; Nevečerel, H. Fuel consumption comparison of two forwarders in lowland forests of pedunculate oak. iForest 2019, 12, 125–131. [Google Scholar] [CrossRef]
- Holzleitner, F.; Kanzian, C.; Höller, N. Monitoring the chipping and transportation of wood fuels with a fleet management system. Silva Fenn. 2013, 47, 899. [Google Scholar] [CrossRef]
- Woo, H.; Acuna, M.; Choi, B.; Han, S. FIELD: A Software Tool That Integrates Harvester Data and Allometric Equations for a Dynamic Estimation of Forest Harvesting Residues. Forests 2021, 12, 834. [Google Scholar] [CrossRef]
- Noordermeer, L.; Sørngård, E.; Astrup, R.; Næsset, E.; Gobakken, T. Coupling a differential global navigation satellite system to a cut-to-length harvester operating system enables precise positioning of harvested trees. Int. J. For. Eng. 2021, 32, 119–127. [Google Scholar] [CrossRef]
- Zimbelman, E.G.; Keefe, R.F. Real-time positioning in logging: Effects of forest stand characteristics, topography, and line-of-sight obstructions on GNSS-RF transponder accuracy and radio signal propagation. PLoS ONE 2018, 13, e0191017. [Google Scholar] [CrossRef]
- Becker, R.M.; Keefe, R.F. Development of activity recognition models for mechanical fuel treatments using consumer-grade GNSS-RF devices and lidar. Forestry 2022, 95, 437–449. [Google Scholar] [CrossRef]
- Gallo, R.; Visser, R.; Mazzetto, F. Developing an automated monitoring system for cable yarding systems. Croat. J. For. Eng. 2021, 42, 213–225. [Google Scholar] [CrossRef]
- Borz, S.A.; Cheta, M.; Birda, M.; Proto, A.R. Classifying Operational Events in Cable Yarding by a Machine Learning Application to GNSS-Collected Data: A Case Study on Gravity-Assisted Downhill Yarding. Ser. II For. Wood Ind. Agric. Food Eng. 2022, 15, 13–32. [Google Scholar] [CrossRef]
- Keefe, R.F.; Zimbelman, E.G.; Wempe, A.M. Use of smartphone sensors to quantify the productive cycle elements of hand fallers on industrial cable logging operations. Int. J. For. Eng. 2019, 30, 132–143. [Google Scholar] [CrossRef]
- Zimbelman, E.G.; Keefe, R.F. Development and validation of smartwatchbased activity recognition models for rigging crew workers on cable logging operations. PLoS ONE 2021, 16, e0250624. [Google Scholar] [CrossRef]
- Becker, R.M.; Keefe, R.F. A novel smartphone-based activity recognition modeling method for tracked equipment in forest operations. PLoS ONE 2022, 17, e0266568. [Google Scholar] [CrossRef] [PubMed]
- Feng, T.; Chen, S.; Feng, Z.; Shen, C.; Tian, Y. Effects of Canopy and Multi-Epoch Observations on Single-Point Positioning Errors of a GNSS in Coniferous and Broadleaved Forests. Remote Sens. 2021, 13, 2325. [Google Scholar] [CrossRef]
- Balestra, M.; Tonelli, E.; Vitali, A.; Urbinati, C.; Frontoni, E.; Pierdicca, R. Geomatic Data Fusion for 3D Tree Modeling: The Case Study of Monumental Chestnut Trees. Remote Sens. 2023, 15, 2197. [Google Scholar] [CrossRef]
- D’EON, R.G.; DELPARTE, D. Effects of radio-collar position and orientation on GPS radio-collar performance, and the implications of PDOP in data screening. J. Appl. Ecol. 2005, 42, 383–388. [Google Scholar] [CrossRef]
- Wing, M.G.; Eklund, A.; Kellogg, L.D. Consumer-grade global positioning system (GPS) accuracy and reliability. J. For. 2005, 103, 169–173. [Google Scholar] [CrossRef]
- Bastos, A.S.; Hasegawa, H. Behavior of GPS signal interruption probability under tree canopies in different forest conditions. Eur. J. Remote Sens. 2013, 46, 613–622. [Google Scholar] [CrossRef]
- Civitarese, V.; Figorilli, S.; Acampora, A.; Sperandio, G.; Assirelli, A.; Scarfone, A.; Bascietto, M. Innovative system for monitoring and mapping loads in logs forwarding. In Proceedings of the European Biomass Conference and Exhibition Proceedings, Online, 26–29 April 2021; pp. 265–267. [Google Scholar]
- Abbas, D.; Di Fulvio, F.; Marchi, E.; Spinelli, R.; Schmidt, M.; Bilek, T.; Han, H.S. A proposal for an integrated methodological and scientific approach to cost used forestry machines. Croat. J. For. Eng. 2021, 42, 63–75. [Google Scholar] [CrossRef]
- Nurminen, T.; Korpunen, H.; Uusitalo, J. Time consumption analysis of the mechanized cut-to-length harvesting system. Silva Fenn. 2006, 40, 335–363. [Google Scholar] [CrossRef]
- Latterini, F.; Venanzi, R.; Picchio, R.; Jagodziński, A.M. Short-term physicochemical and biological impacts on soil after forest logging in Mediterranean broadleaf forests: 15 years of field studies summarized by a data synthesis under the meta-analytic framework. Forestry 2023, cpac60. [Google Scholar] [CrossRef]
- Karami, S.; Jourgholami, M.; Attarod, P.; Venanzi, R.; Latterini, F.; Stefanoni, W.; Picchio, R. The medium-term effects of forest operations on a mixed broadleaf forest: Changes in soil properties and loss of nutrients. Land Degrad Dev. 2023, 34, 2961–2974. [Google Scholar] [CrossRef]
- Nazari, M.; Eteghadipour, M.; Zarebanadkouki, M.; Ghorbani, M.; Dippold, M.A.; Bilyera, N.; Zamanian, K. Impacts of Logging-Associated Compaction on Forest Soils: A Meta-Analysis. Front. For. Glob. Chang. 2021, 4, 780074. [Google Scholar] [CrossRef]
- Ovaskainen, H.; Riekki, K. Computation of Strip Road Networks Based on Harvester Location Data. Forests 2022, 13, 782. [Google Scholar] [CrossRef]
- Starke, M.; Derron, C.; Heubaum, F.; Ziesak, M. Rut Depth Evaluation of a Triple-Bogie System for Forwarders—Field Trials with TLS Data Support. Sustainability 2020, 12, 6412. [Google Scholar] [CrossRef]
- Ferenčík, M.; Dudáková, Z.; Kardoš, M.; Sivák, M.; Merganičová, K.; Merganič, J. Measuring Soil Surface Changes after Traffic of Various Wheeled Skidders with Close-Range Photogrammetry. Forests 2022, 13, 976. [Google Scholar] [CrossRef]
- Iglhaut, J.; Cabo, C.; Puliti, S.; Piermattei, L.; O’Connor, J.; Rosette, J. Structure from Motion Photogrammetry in Forestry: A Review. Curr. For. Rep. 2019, 5, 155–168. [Google Scholar] [CrossRef]
- Hui, Z.; Cheng, P.; Yang, B.; Zhou, G. Multi-level self-adaptive individual tree detection for coniferous forest using airborne LiDAR. Int. J. Appl. Earth Obs. Geoinf. 2022, 114, 103028. [Google Scholar] [CrossRef]
- Hamedianfar, A.; Mohamedou, C.; Kangas, A.; Vauhkonen, J. Deep learning for forest inventory and planning: A critical review on the remote sensing approaches so far and prospects for further applications. Forestry 2022, 95, 451–465. [Google Scholar] [CrossRef]
- Lines, E.R.; Fischer, F.J.; Owen, H.J.F.; Jucker, T. The shape of trees: Reimagining forest ecology in three dimensions with remote sensing. J. Ecol. 2022, 110, 1730–1745. [Google Scholar] [CrossRef]
- Wang, D.; Momo Takoudjou, S.; Casella, E. LeWoS: A universal leaf-wood classification method to facilitate the 3D modelling of large tropical trees using terrestrial LiDAR. Methods Ecol. Evol. 2020, 11, 376–389. [Google Scholar] [CrossRef]
- Brede, B.; Calders, K.; Lau, A.; Raumonen, P.; Bartholomeus, H.M.; Herold, M.; Kooistra, L. Non-destructive tree volume estimation through quantitative structure modelling: Comparing UAV laser scanning with terrestrial LIDAR. Remote Sens. Environ. 2019, 233, 111355. [Google Scholar] [CrossRef]
- Wehr, A.; Lohr, U. Airborne laser scanning—An introduction and overview. ISPRS J. Photogramm. Remote Sens. 1999, 54, 68–82. [Google Scholar] [CrossRef]
- Beland, M.; Parker, G.; Sparrow, B.; Harding, D.; Chasmer, L.; Phinn, S.; Antonarakis, A.; Strahler, A. On promoting the use of lidar systems in forest ecosystem research. For. Ecol. Manag. 2019, 450, 117484. [Google Scholar] [CrossRef]
- Wu, X.; Shen, X.; Cao, L.; Wang, G.; Cao, F. Assessment of Individual Tree Detection and Canopy Cover Estimation using Unmanned Aerial Vehicle based Light Detection and Ranging (UAV-LiDAR) Data in Planted Forests. Remote Sens. 2019, 11, 908. [Google Scholar] [CrossRef]
- Türk, Y.; Aydin, A.; Eker, R. Comparison of Autonomous and Manual UAV Flights in Determining Forest Road Surface Deformations. Eur. J. For. Eng. 2022, 8, 77–84. [Google Scholar] [CrossRef]
- Wang, C.; Wen, C.; Dai, Y.; Yu, S.; Liu, M. Urban 3D modeling with mobile laser scanning: A review. Virtual Real. Intell. Hardw. 2020, 2, 175–212. [Google Scholar] [CrossRef]
- Koren, M.; Slančík, M.; Suchomel, J.; Dubina, J. Use of terrestrial laser scanning to evaluate the spatial distribution of soil disturbance by skidding operations. iForest 2015, 8, 386–393. [Google Scholar] [CrossRef]
- Kim, J.; Kim, I.; Ha, E.; Choi, B. UAV Photogrammetry for Soil Surface Deformation Detection in a Timber Harvesting Area, South Korea. Forests 2023, 14, 980. [Google Scholar] [CrossRef]
- Marra, E.; Wictorsson, R.; Bohlin, J.; Marchi, E.; Nordfjell, T. Remote measuring of the depth of wheel ruts in forest terrain using a drone. Int. J. For. Eng. 2021, 32, 224–234. [Google Scholar] [CrossRef]
- Marra, E.; Laschi, A.; Fabiano, F.; Foderi, C.; Neri, F.; Mastrolonardo, G.; Nordfjell, T.; Marchi, E. Impacts of wood extraction on soil: Assessing rutting and soil compaction caused by skidding and forwarding by means of traditional and innovative methods. Eur. J. For. Res. 2022, 141, 71–86. [Google Scholar] [CrossRef]
- Eker, R. Comparative use of PPK-integrated close-range terrestrial photogrammetry and a handheld mobile laser scanner in the measurement of forest road surface deformation. Meas. J. Int. Meas. Confed. 2023, 206, 112322. [Google Scholar] [CrossRef]
- Nadal-Romero, E.; Revuelto, J.; Errea, P.; López-Moreno, J.I. The application of terrestrial laser scanner and SfM photogrammetry in measuring erosion and deposition processes in two opposite slopes in a humid badlands area (central Spanish Pyrenees). SOIL 2015, 1, 561–573. [Google Scholar] [CrossRef]
- Ryding, J.; Williams, E.; Smith, M.; Eichhorn, M. Assessing Handheld Mobile Laser Scanners for Forest Surveys. Remote Sens. 2015, 7, 1095–1111. [Google Scholar] [CrossRef]
- CloudCompare Software. Available online: https://www.danielgm.net/cc/ (accessed on 19 February 2023).
- Esposito, G.; Mastrorocco, G.; Salvini, R.; Oliveti, M.; Starita, P. Application of UAV photogrammetry for the multi-temporal estimation of surface extent and volumetric excavation in the Sa Pigada Bianca open-pit mine, Sardinia, Italy. Environ. Earth Sci. 2017, 76, 103. [Google Scholar] [CrossRef]
- Sygnatur, E.F. Logging is perilous work. Compens. Work. Cond. 1998, 3, 3–9. [Google Scholar]
- Conway, S.H.; Pompeii, L.A.; Casanova, V.; Douphrate, D.I. A qualitative assessment of safe work practices in logging in the southern United States. Am. J. Ind. Med. 2017, 60, 58–68. [Google Scholar] [CrossRef] [PubMed]
- Wempe, A.M.; Keefe, R.F.; Newman, S.M.; Paveglio, T.B. Intent to adopt location sharing for logging safety applications. Safety 2019, 5, 7. [Google Scholar] [CrossRef]
- Zimbelman, E.G.; Keefe, R.F. Lost in the woods: Forest vegetation, and not topography, most affects the connectivity of mesh radio networks for public safety. PLoS ONE 2022, 17, e0278645. [Google Scholar] [CrossRef]
- Egan, A.; Taggart, D. Who will log in Maine’s north woods? A cross-cultural study of occupational choice and prestige. North. J. Appl. For. 2004, 21, 200–208. [Google Scholar] [CrossRef]
- Mederski, P.S.; Schweier, J.; Đuka, A.; Tsioras, P.; Bont, L.G.; Bembenek, M. Mechanised Harvesting of Broadleaved Tree Species in Europe. Curr. For. Rep. 2022, 8, 1–19. [Google Scholar] [CrossRef]
- Cavalli, R. Prospects of research on cable logging in forest engineering community. Croat. J. For. Eng. 2012, 33, 339–356. [Google Scholar]
- Marchi, L.; Mologni, O.; Trutalli, D.; Scotta, R.; Cavalli, R.; Montecchio, L.; Grigolato, S. Safety assessment of trees used as anchors in cable-supported tree harvesting based on experimental observations. Biosyst. Eng. 2019, 186, 71–82. [Google Scholar] [CrossRef]
- Mologni, O.; Lyons, C.K.; Marchi, L.; Amishev, D.; Grigolato, S.; Cavalli, R.; Röser, D. Assessment of cable tensile forces in active winch-assist harvesting using an anchor machine configuration. Eur. J. For. Res. 2021, 140, 745–759. [Google Scholar] [CrossRef]
- Mologni, O.; Lyons, C.K.; Zambon, G.; Proto, A.R.; Zimbalatti, G.; Cavalli, R.; Grigolato, S. Skyline tensile force monitoring of mobile tower yarders operating in the Italian Alps. Eur. J. For. Res. 2019, 138, 847–862. [Google Scholar] [CrossRef]
- Mologni, O.; Marchi, L.; Lyons, C.K.; Grigolato, S.; Cavalli, R.; Röser, D. Skyline tensile forces in cable logging: Field observations vs. software calculations. Croat. J. For. Eng. 2021, 42, 227–243. [Google Scholar] [CrossRef]
- Cadei, A.; Mologni, O.; Proto, A.R.; D’Anna, G.; Grigolato, S. Using high-frequency accelerometer to detect machine tilt. In Proceedings of the Engineering for Rural Development, Jelgava, Latvia, 20–22 May 2020. [Google Scholar]
- Schönauer, M.; Holzfeind, T.; Hoffmann, S.; Holzleitner, F.; Hinte, B.; Jaeger, D. Effect of a traction-assist winch on wheel slippage and machine induced soil disturbance in flat terrain. Int. J. For. Eng. 2021, 32, 1–11. [Google Scholar] [CrossRef]
- Najafi, A.; Solgi, A.; Sadeghi, S.H. Soil disturbance following four wheel rubber skidder logging on the steep trail in the north mountainous forest of Iran. Soil Tillage Res. 2009, 103, 165–169. [Google Scholar] [CrossRef]
- Naghdi, R.; Solgi, A.; Labelle, E.R.; Nikooy, M. Combined effects of soil texture and machine operating trail gradient on changes in forest soil physical properties during ground-based skidding. Pedosphere 2020, 30, 508–516. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).