
Operational Analysis of Grapple Yarding in New Zealand: A Case Study of Three Mechanized Harvesting Operations


Abstract
1. Introduction
2. Materials and Methods
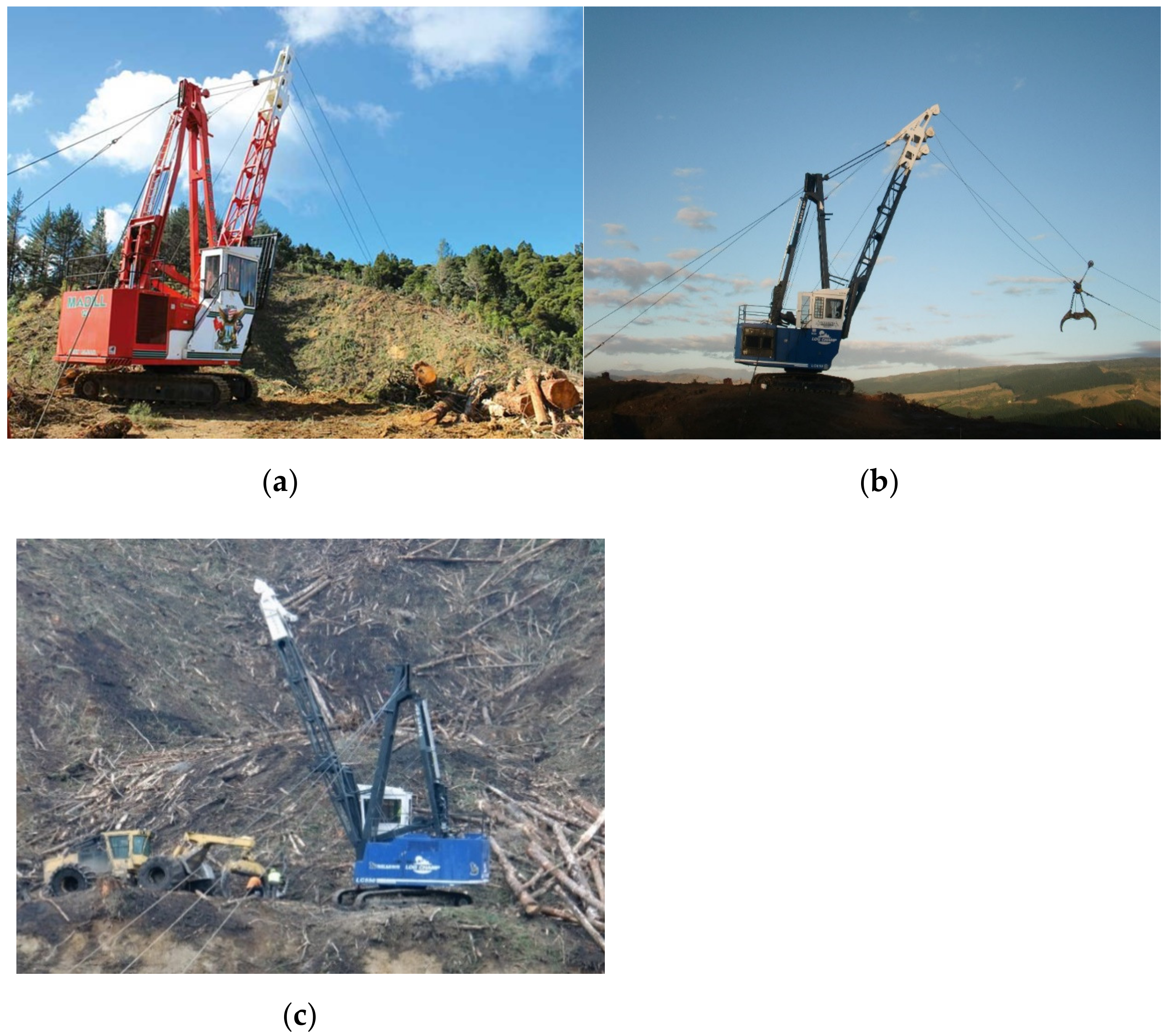
2.1. Description of Swing Yarders and Study Sites
2.2. Time and Motion Study
3. Results and Discussion
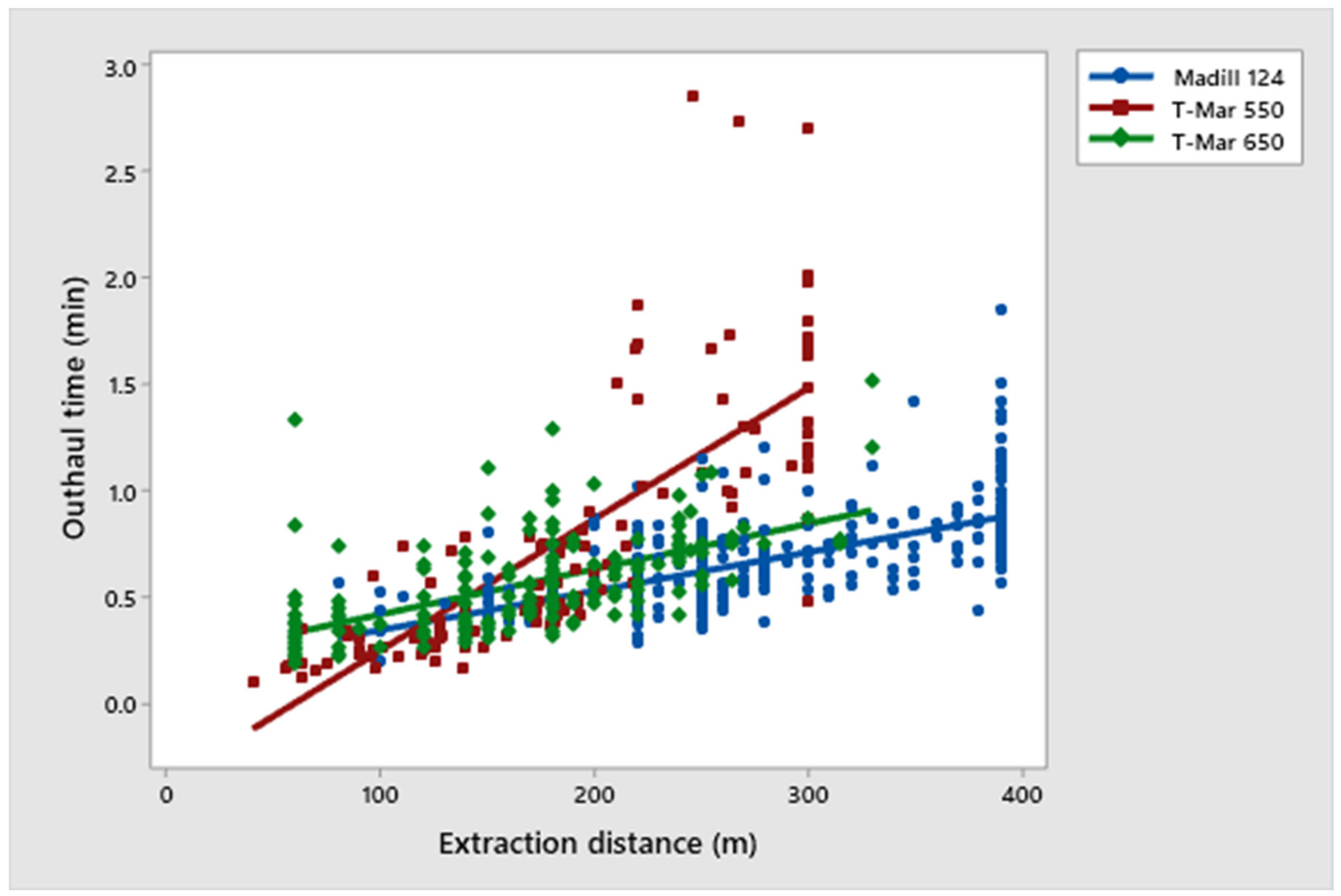
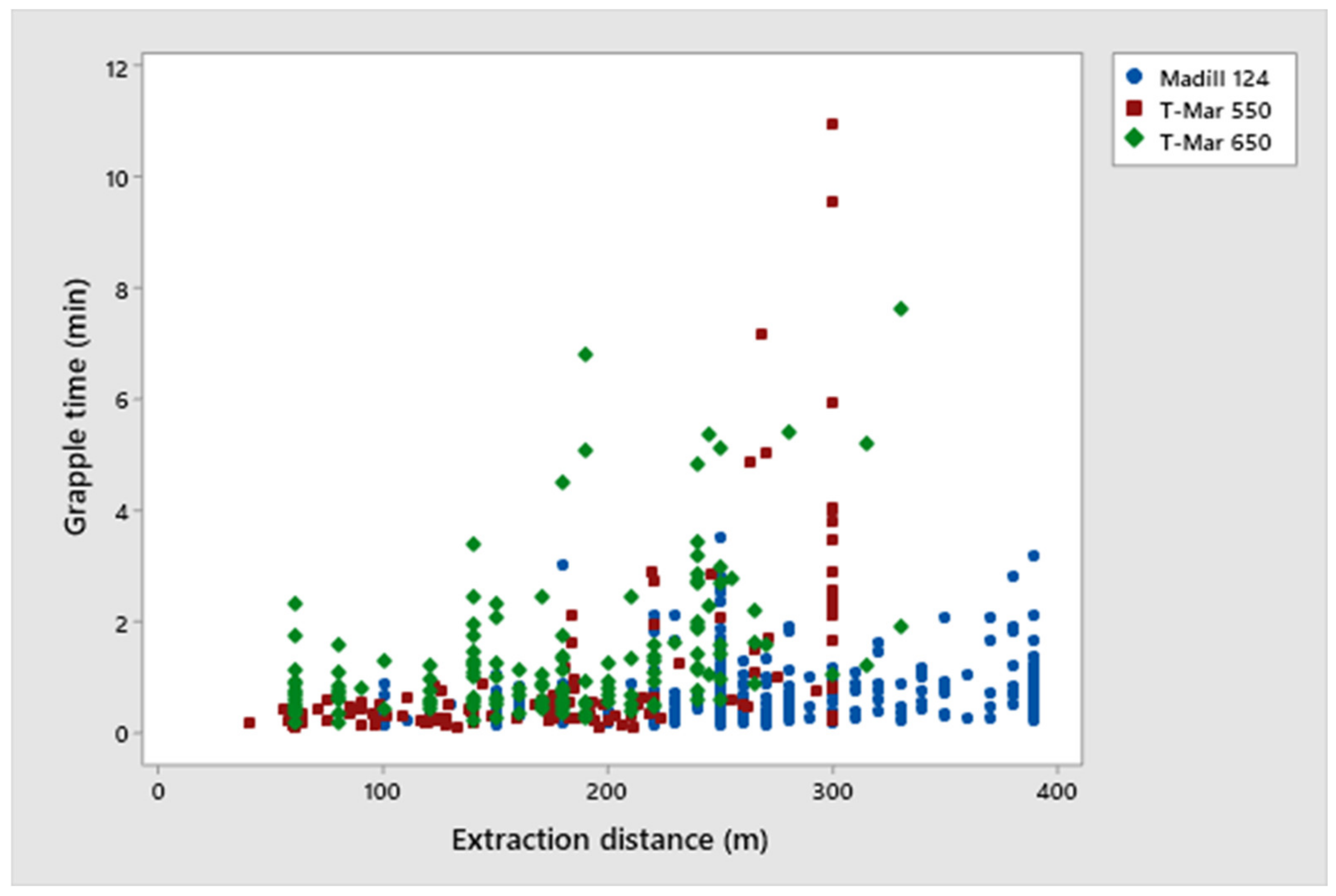
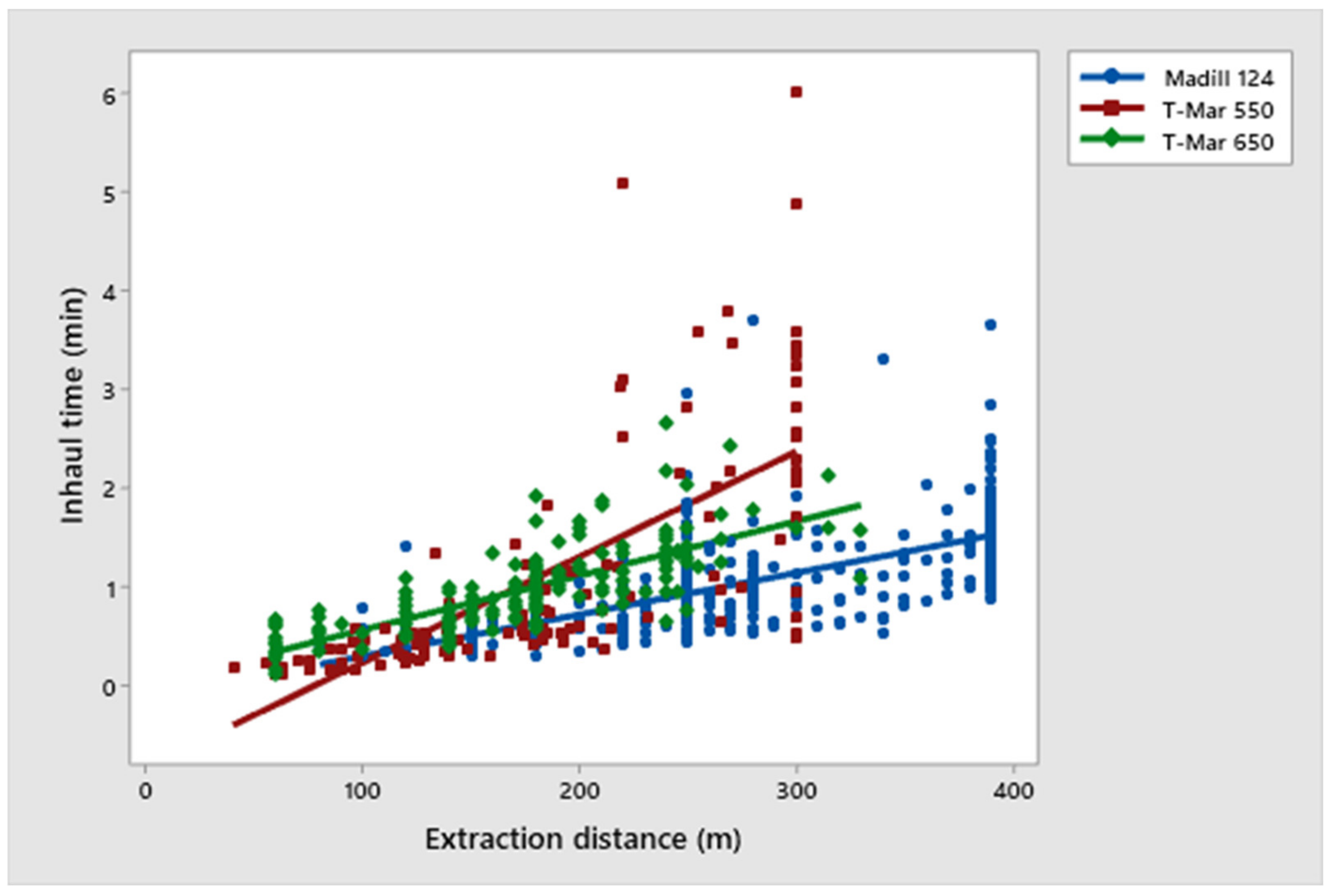
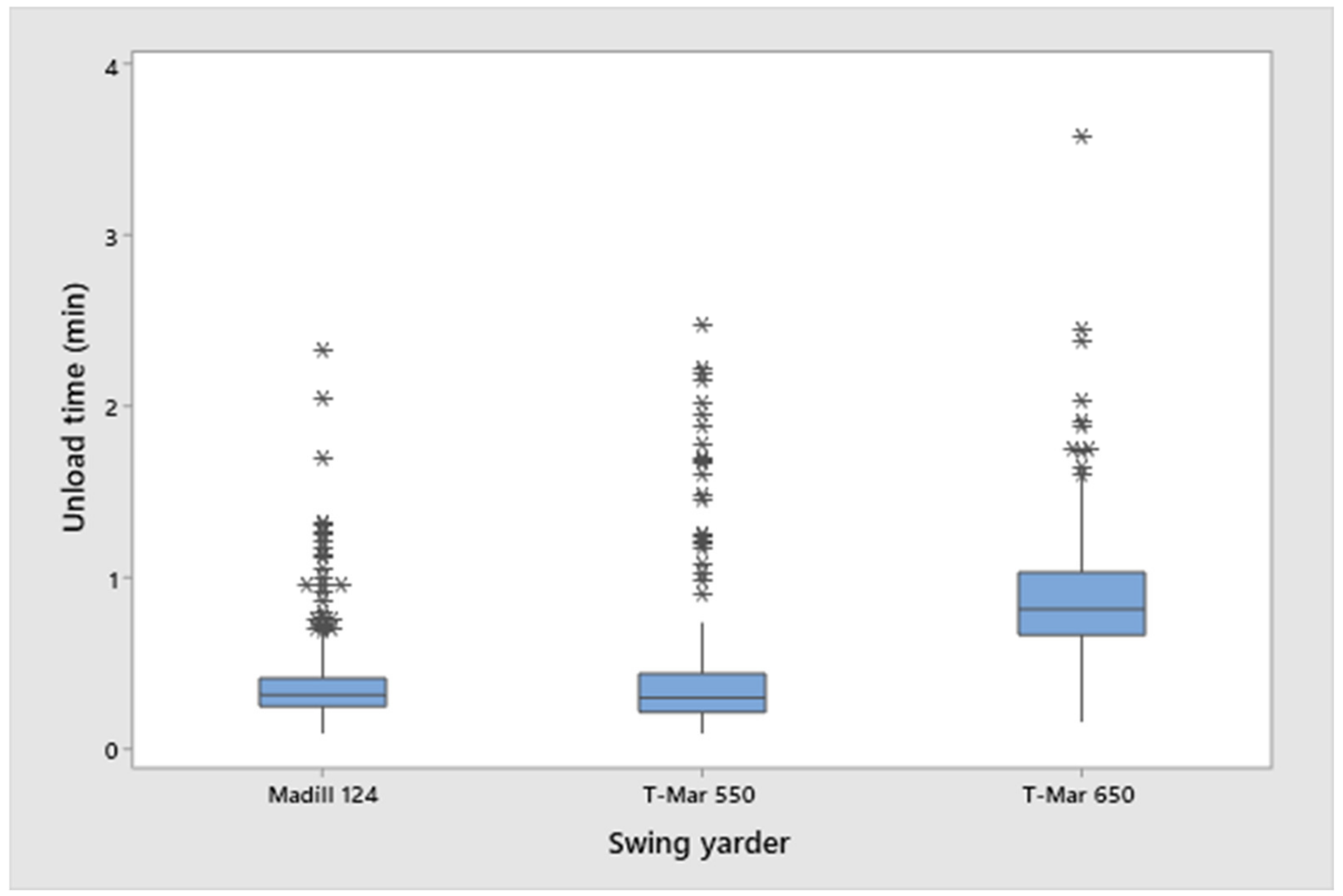
3.1. Analysis of the Yarding Cycle
3.2. Stem Layout, Yarding Cycle Time and Productivity
3.3. Swing Yarder Utilisation
4. Conclusions
- Utilization of the yarders was influenced by various delays, including mechanical, operational and personal, with operational delays being the most prevailing.
- The swing yarders performed better with lesser variability in the elemental cycle time at yarding distances less than 200 m.
- Stem presentation across the cutover could significantly influence the mean payload per cycle and, consequently, the machine productivity.
- Bunching of stems in piles of two or three improves the mean payload and productivity of the yarders.
- The use of choker-setters in combination with fully mechanized yarding significantly reduced the machine productivity having the highest cycle time and lowest productivity per productive machine hour.
- With careful harvest planning, mean yarding cycle time could be significantly reduced and payloads maximized to increase the productivity of swing yarders in the near future.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Harrill, H.; Visser, R. Survey of Yarders and Rigging Configurations: 2018; Forest Growers Research: Harvesting Technical Note; Forest Growers Research Ltd.: Rotorua, New Zealand, 2018; Volume 10. [Google Scholar]
- Visser, R. A Decade of Benchmarking Harvesting Cost and Productivity; Forest Growers Research: Harvesting Technical Note; Forest Growers Research Ltd.: Rotorua, New Zealand, 2019; Volume 12. [Google Scholar]
- Work Safe, B. Cable Yarding Systems Handbook; The Worker’s Compensation Board of British Columbia: Richmond, BC, Canada, 2006. [Google Scholar]
- Mann, C.N. Why running skylines and interlock yarders. In Proceedings of the Skyline Logging Symposium, Vancouver, BC, Canada, 17–26 December 1976. [Google Scholar]
- Carson, W.W.; Jorgenson, J.E. Understanding Interlock Yarders; Research Note, pnw-221; Usda Forest Service, Pacific Northwest Forest Range and Experiment Station: Portland, OR, USA, 1974; 13p.
- MacDonald, A.J. Harvesting Systems and Equipment in British Columbia; Ministry of Forests, Forest Practices Branch: Vancouver, BC, Canada, 1999; 197p.
- Liley, B. A Survey of the Logging Industry; Technical Report; Logging Industry Research Organisation: Rotorua, New Zealand, 1985; Volume 10. [Google Scholar]
- Visser, R. Survey of Cable Yarders Used in New Zealand; Harvesting Technical Notes; Forest Growers Research Ltd.: Rotorua, New Zealand, 2013; Volume 6. [Google Scholar]
- Harrill, H.; Visser, R. Rigging Configurations Used in New Zealand Cable Logging; Future Forests Research Ltd.: Rotorua, New Zealand, 2011. [Google Scholar]
- Prebble, R. Madill 122 Interlock Swing Yarder; New Zealand Logging Industry Research Association Inc.: Rotorua, New Zealand, 1989; Volume 14. [Google Scholar]
- Raymond, K. Innovation to increase profitability of steep terrain harvesting in new zealand. NZJ For. 2012, 57, 19–23. [Google Scholar]
- Harrill, H.; Visser, R.; Raymond, K. New zealand cable logging 2008–2018: A period of change. Curr. For. Rep. 2019, 5, 114–123. [Google Scholar] [CrossRef]
- Olund, D. The future of cable logging. In Proceedings of the International Mountain Logging and 11th Northwest Pacific Skyline Symposium, Seattle, WA, USA, 10–12 December 2001; pp. 10–12. [Google Scholar]
- Visser, R.; Raymond, K.; Harrill, H. Mechanising steep terrain harvesting operations. NZJ For. 2014, 59, 3–8. [Google Scholar] [CrossRef]
- Visser, R. Benchmarking Harvesting Cost and Productivity—2017 Update; Harvesting Technical Note HTN10-02; Forest Growers Research Ltd.: Rotorua, New Zealand, 2018; 4p. [Google Scholar]
- Visser, R.; Obi, O.F. Benchmarking 2019 Data and Longer-Term Productivity and Cost Analyses; Forest Growers Research: Harvesting Technical Note H045; Forest Growers Research Ltd.: Rotorua, New Zealand, 2020. [Google Scholar]
- FORME. Informe: Independent Harvesting Survey Equipment/Accessories/Vehicles/Labour/Overheads; Forme Consulting Group Ltd.: Wellington, New Zealand, 2019; 48p. [Google Scholar]
- Kim, M.K.; Park, S.J. An analysis of the operational time and productivity in whole-tree and cut-to-length logging operation system. J. Korean Soc. For. Sci. 2012, 101, 344–355. [Google Scholar]
- Sawaguchi, I.; Sasaki, S.; Tsuchiya, Y.; Tatsukawa, S. Labor productivity of line thinning with a mini swing-yarder. Bull. Iwate Univ. For. 2004, 35, 47–57. [Google Scholar]
- Cho, M.; Cho, K.; Choi, B.; Cha, D. Yarding productivity of tree-length harvesting using a small cable-yarder in steep slope, South Korea. For. Sci. Technol. 2018, 14, 132–137. [Google Scholar] [CrossRef]
- Nuske, S.R. A Comparative Study of Mechanized Cable Harvesting Systems in New Zealand. Bachelor Dissertation, School of Forestry, University of Canterbury, Christchurch, New Zealand, 2014; 47p. [Google Scholar]
- Marshall, H. Comparison of Methods for Estimating Harvesting Payloads; Report No.: HTN02-08; Future Forests Research Ltd.: Rotorua, New Zealand, 2009; 4p. [Google Scholar]
- Amishev, D.; Evanson, T. Innovative methods for steep terrain harvesting. Proc. FORMEC 2010, 2010, 11–14. [Google Scholar]
- Acuna, M.; Skinnell, J.; Evanson, T.; Mitchell, R. Bunching with a self-levelling feller-buncher on steep terrain for efficient yarder extraction. Croat. J. For. Eng. J. Theory Appl. For. Eng. 2011, 32, 521–531. [Google Scholar]
- Harper, C. Summary of New Zealand Cable Logging Production Studies; Logging Industry Research Organisation (LIRO): Rotorua, New Zealand, 1992; 155p. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case Study Site | Yarding Cycles (n) | Mean Extract. Dist. (m) | Mean Piece Size (t) | Mean Payload (t) | Mean Yarding Cycle Time (min) | Mean Total Cycle (min) | Mean Prod (t/PMH) | |||
|---|---|---|---|---|---|---|---|---|---|---|
| Outhaul | Grapple | Inhaul | Unload | |||||||
| CS-1 | 410 | 277 | 1.85 | 2.43 | 0.67 | 0.69 | 1.04 | 0.38 | 2.77 | 55.5 |
| CS-2 | 176 | 166 | 1.73 | 2.80 | 0.56 | 1.24 | 0.92 | 0.90 | 3.63 | 50.8 |
| CS-3 | 125 | 185 | 1.80 | 1.73 | 0.78 | 1.21 | 1.16 | 0.52 | 3.66 | 53.8 |
| All sites | 711 | 233.3 | 1.81 | 2.4 | 0.66 | 0.92 | 1.03 | 0.53 | 3.14 | 54.0 |
| Source | DF | Adj SS | Adj MS | F-Value | p-Value |
|---|---|---|---|---|---|
| Swing Yarder | 2 | 34.06 | 17.0283 | 132.37 | 0.000 |
| Error | 708 | 91.08 | 0.1286 | ||
| Total | 710 | 125.13 |
| Swing Yarder | Mean | Grouping | ||
|---|---|---|---|---|
| T-Mar 650 (CS-2) | 0.90 | A | ||
| T-Mar 550 (CS-3) | 0.52 | B | ||
| Madill 124 (CS-1) | 0.38 | C | ||
| Swing Yarder | Stem Presentation | Number of Yarding Cycles | Mean Yarding Distance (m) | Mean Grapple Time (min) | Total Cycle Time (min) | Mean Payload Per Cycle (tons) | Mean Productivity (t/PMH) |
|---|---|---|---|---|---|---|---|
| CS-2 | MechFell | 32 | 65 | 0.76 | 2.22 | 1.7 | 48.9 |
| MechFell and Bunched | 144 | 188 | 1.35 | 3.94 | 3.1 | 51.3 | |
| CS-3 | ManualFell | 101 | 161 | 0.76 | 2.35 | 1.7 | 63.3 |
| ManualFell and Choked | 24 | 279 | 3.11 | 9.17 | 1.8 | 12.2 | |
| CS-1 | MechFell | 220 | 251 | 0.63 | 2.51 | 2.2 | 54.9 |
| MechFell and Bunched | 76 | 300 | 0.76 | 3.62 | 3.0 | 50.5 | |
| MechFell and SurgePile | 114 | 254 | 0.75 | 2.70 | 2.5 | 59.8 |
| Swing Yarder | Total Scheduled Machine Hour (hrs) | Utilization (%) | Delays (%) | |||
|---|---|---|---|---|---|---|
| Mechanical | Operational | Personal | Total Delays | |||
| CS-1 | 42.5 | 84 | 2 | 12 | 2 | 16 |
| CS-2 | 20.7 | 69 | 7 | 14 | 10 | 31 |
| CS-3 | 14.0 | 62 | 23 | 12 | 3 | 38 |
| Overall | 77.2 | 76 | 7.1 | 12.6 | 4.3 | 24 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Visser, R.; Harrill, H.; Obi, O.F.; Holmes, L. Operational Analysis of Grapple Yarding in New Zealand: A Case Study of Three Mechanized Harvesting Operations. Forests 2023, 14, 190. https://doi.org/10.3390/f14020190
Visser R, Harrill H, Obi OF, Holmes L. Operational Analysis of Grapple Yarding in New Zealand: A Case Study of Three Mechanized Harvesting Operations. Forests. 2023; 14(2):190. https://doi.org/10.3390/f14020190
Chicago/Turabian StyleVisser, Rien, Hunter Harrill, Okey Francis Obi, and Luke Holmes. 2023. "Operational Analysis of Grapple Yarding in New Zealand: A Case Study of Three Mechanized Harvesting Operations" Forests 14, no. 2: 190. https://doi.org/10.3390/f14020190
APA StyleVisser, R., Harrill, H., Obi, O. F., & Holmes, L. (2023). Operational Analysis of Grapple Yarding in New Zealand: A Case Study of Three Mechanized Harvesting Operations. Forests, 14(2), 190. https://doi.org/10.3390/f14020190