
The Performance of Discriminative Tracking Algorithms for the Sway Frequency Measurement of Betula platyphylla Sukaczev (Individual Branch and Tree) under Artificial and Natural Excitation

Abstract
:1. Introduction
- The paper compares the performance of six discriminative tracking algorithms for the sway tracking of Betula platyphylla Sukaczev (individual branch and tree) under artificial and natural excitation.
- The paper investigates whether the six discriminative tracking algorithms are suitable for measuring tree (Betula platyphylla Sukaczev) sway frequency under both artificial and environmental excitation conditions.
- The paper analyzes the reasons why the tracking algorithms are not suitable for measuring tree (Betula platyphylla Sukaczev) sway frequency.
2. Materials and Methods
2.1. Experimental Data
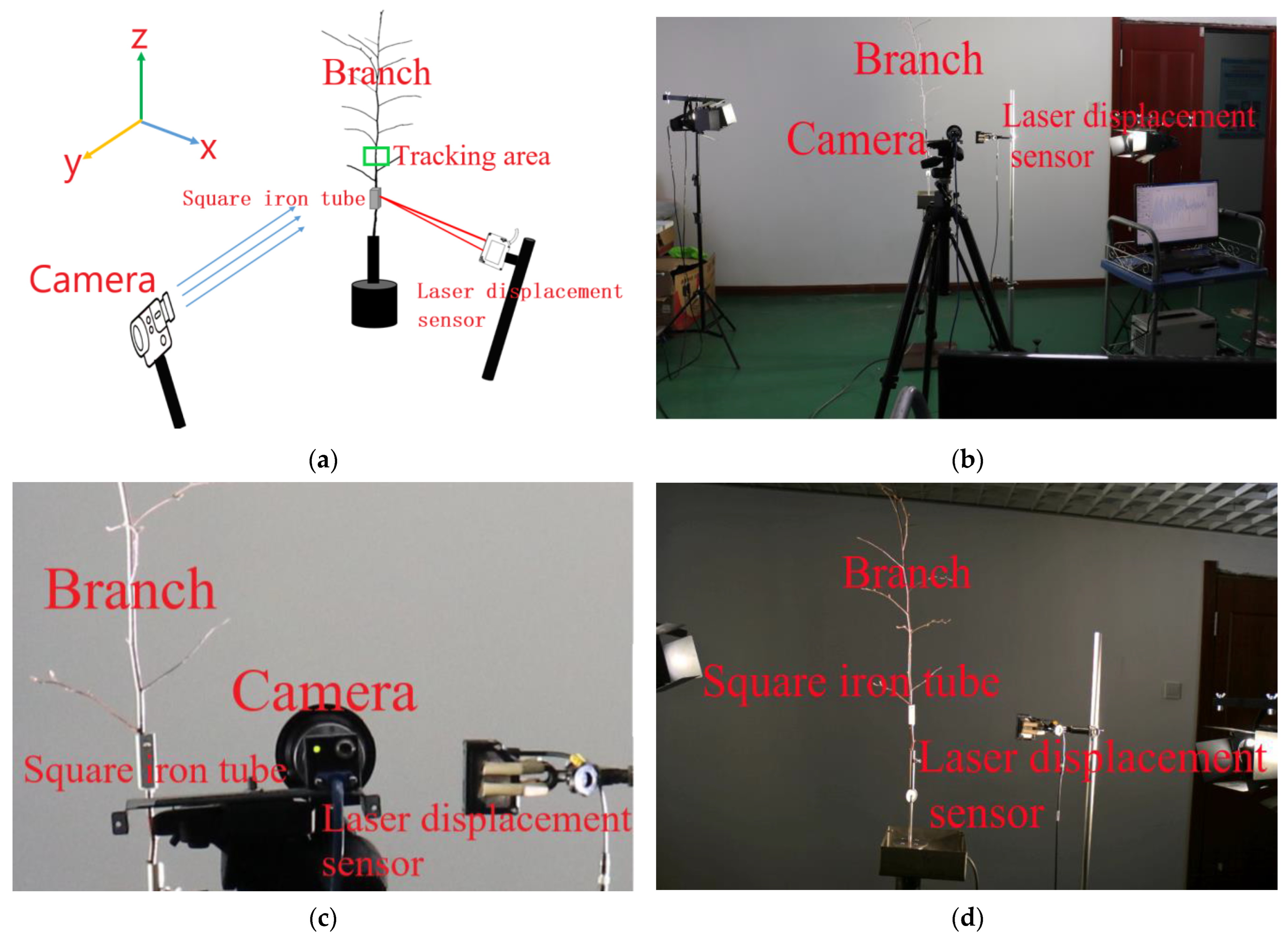
2.1.1. Data Collection of Branch Sway under Artificial Excitation Conditions
2.1.2. Data of Tree Sway under Environmental Excitation Conditions
2.2. Tracking Methods
2.2.1. Online Boosting Algorithm
2.2.2. Online MIL Algorithm
2.2.3. TLD Algorithm
2.2.4. MOSSE Algorithm
2.2.5. KCF Algorithm
2.2.6. CSR-DCF Algorithm
2.3. Frequency Measurement
2.4. Evaluation Metrics for Tracking Algorithms
3. Results
3.1. Experimental Results of Branch Sway under Artificial Excitation Conditions
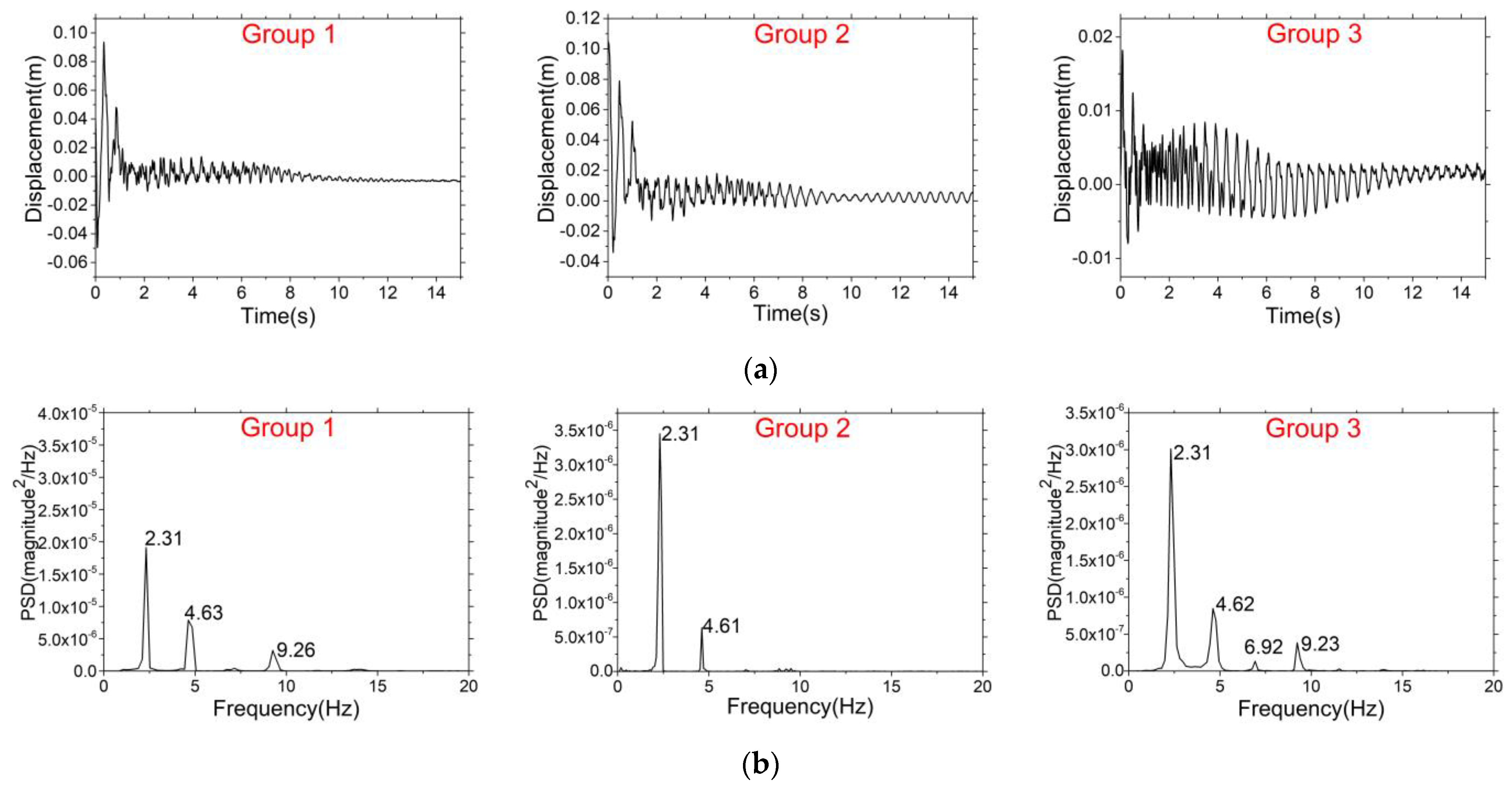
3.1.1. The Measurement Results of the Laser Displacement Sensor
3.1.2. Tracking Time
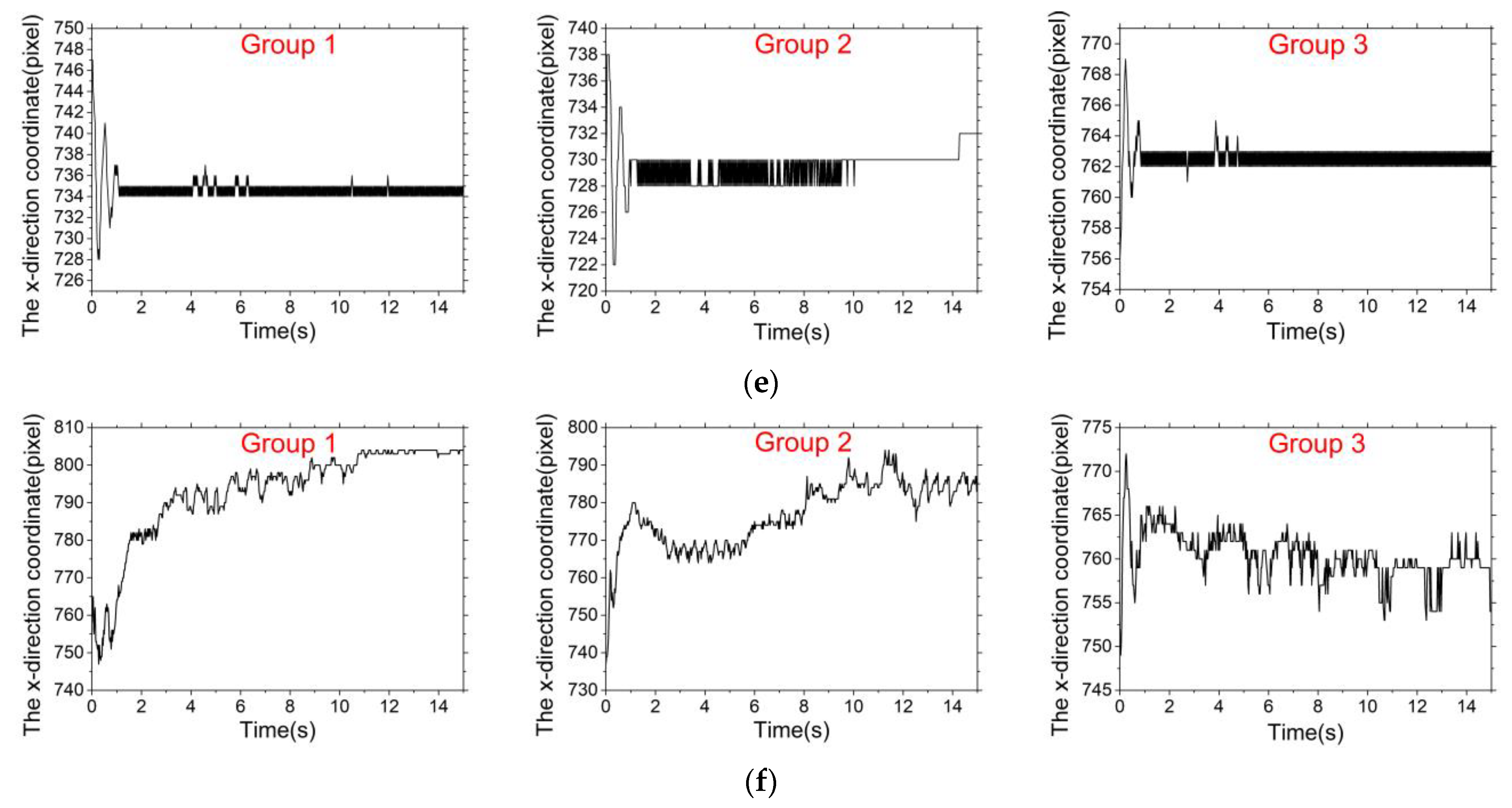
3.1.3. Tracking Situation
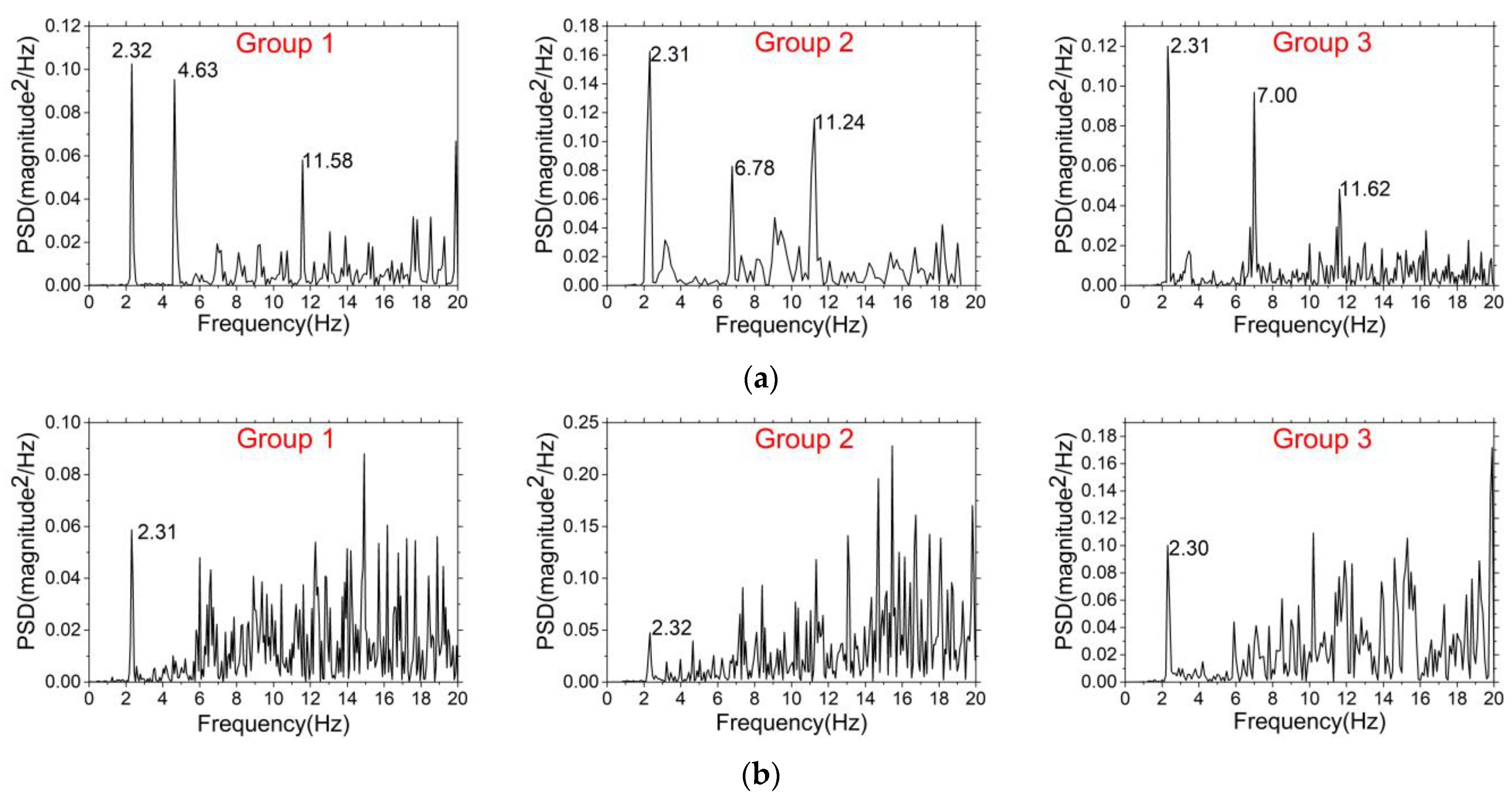
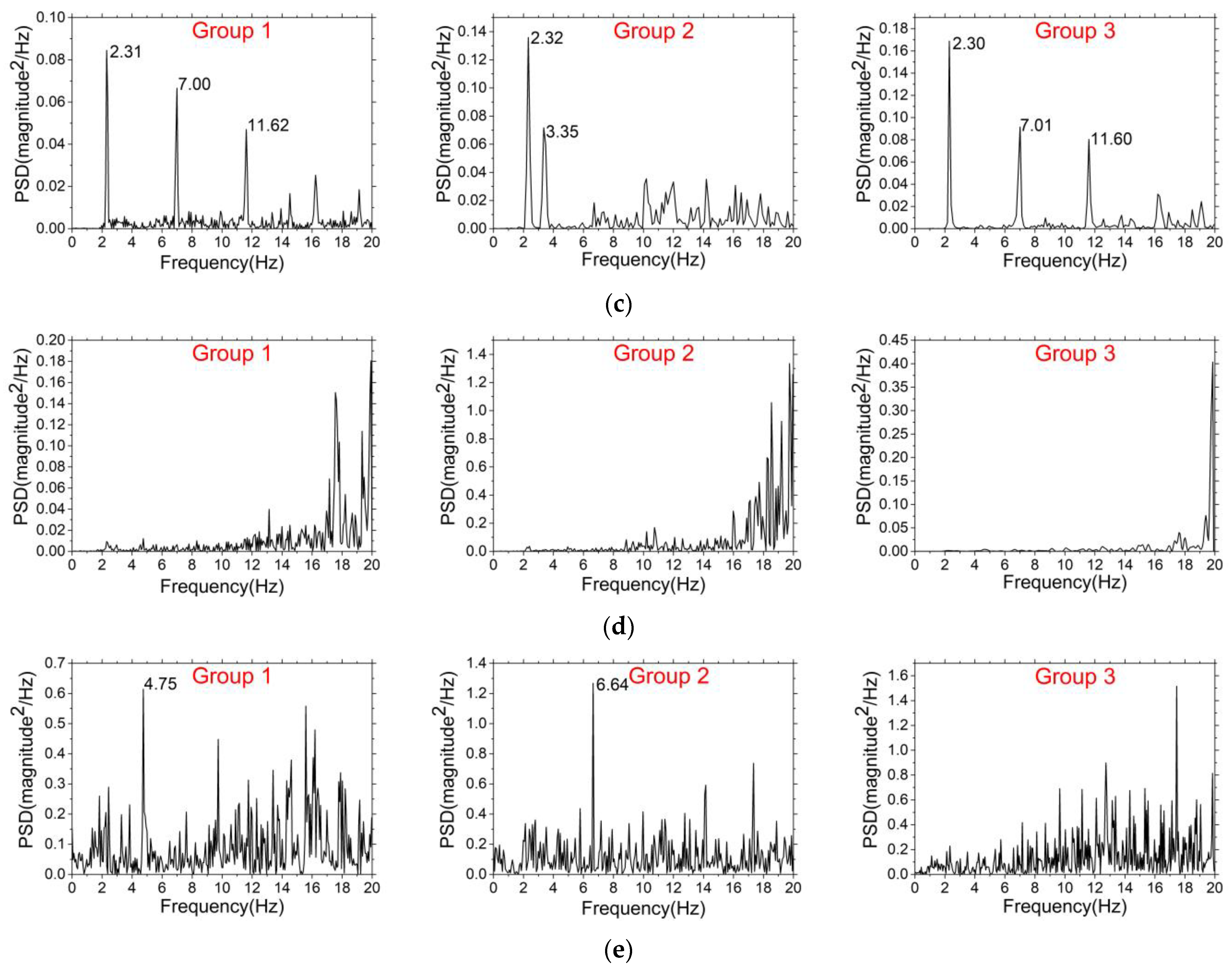
3.1.4. Frequency Measurement Results Based on Video Method
3.2. Experimental Results of Tree Sway under Environmental Excitation Conditions
3.2.1. Tracking Time
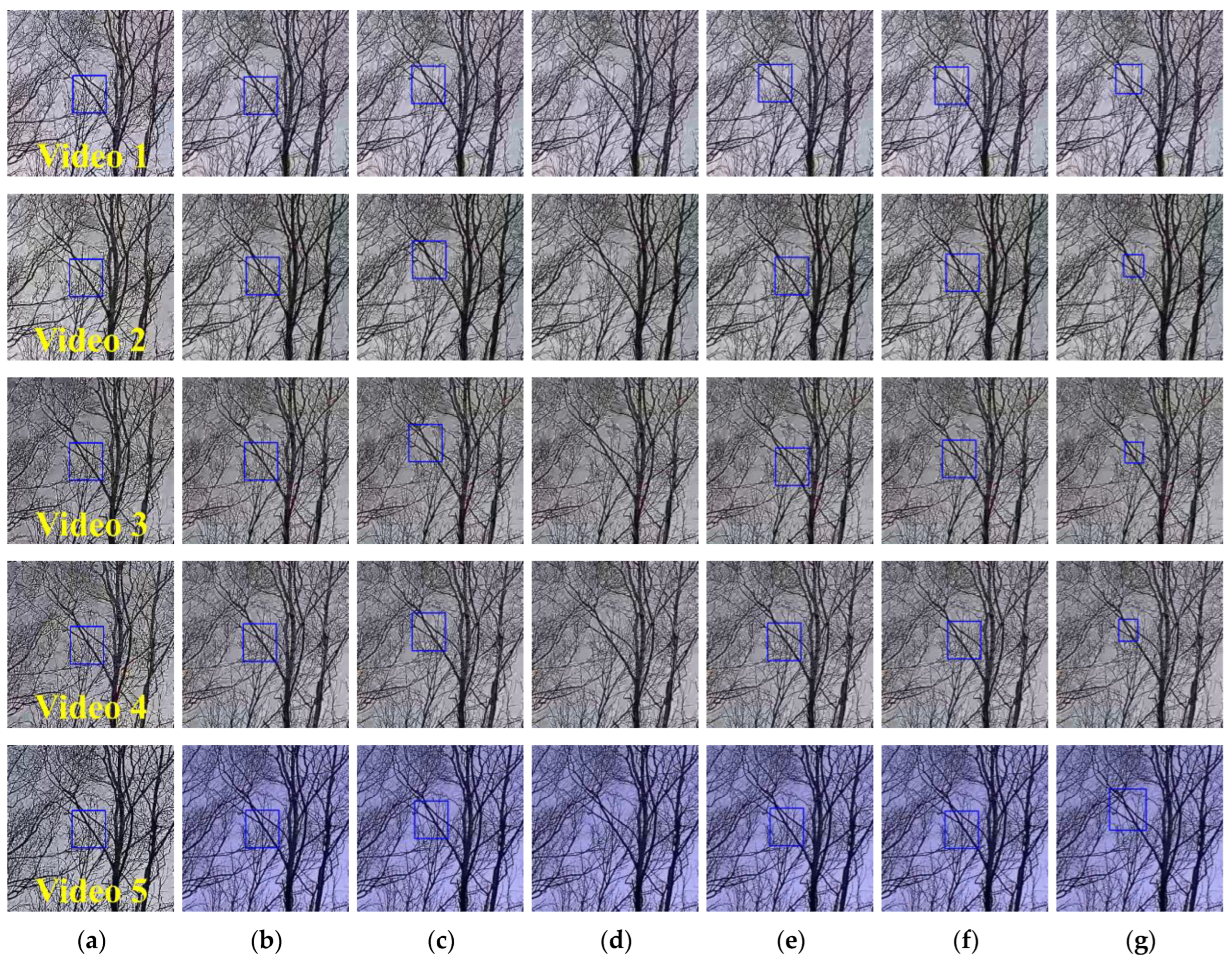
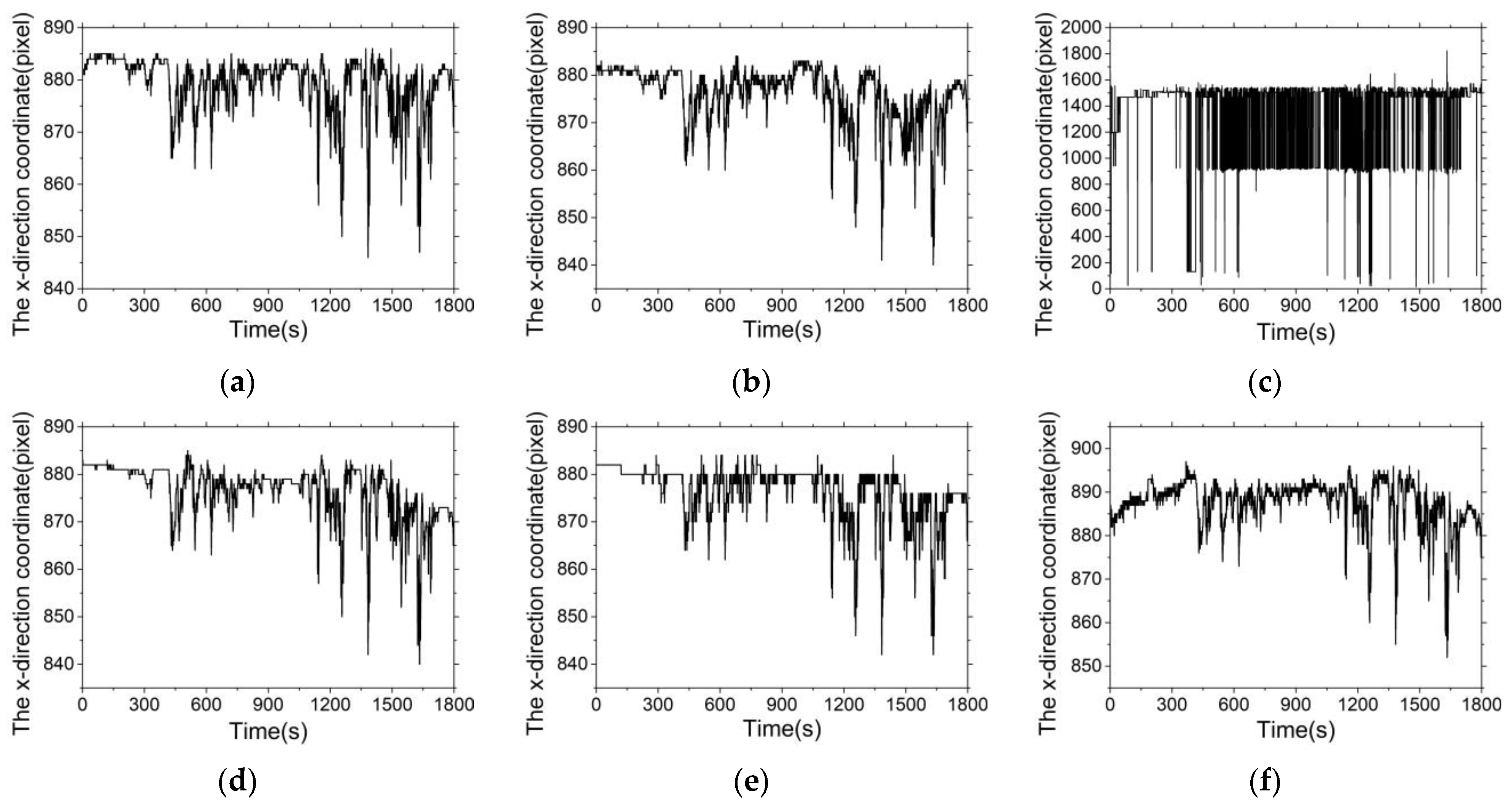
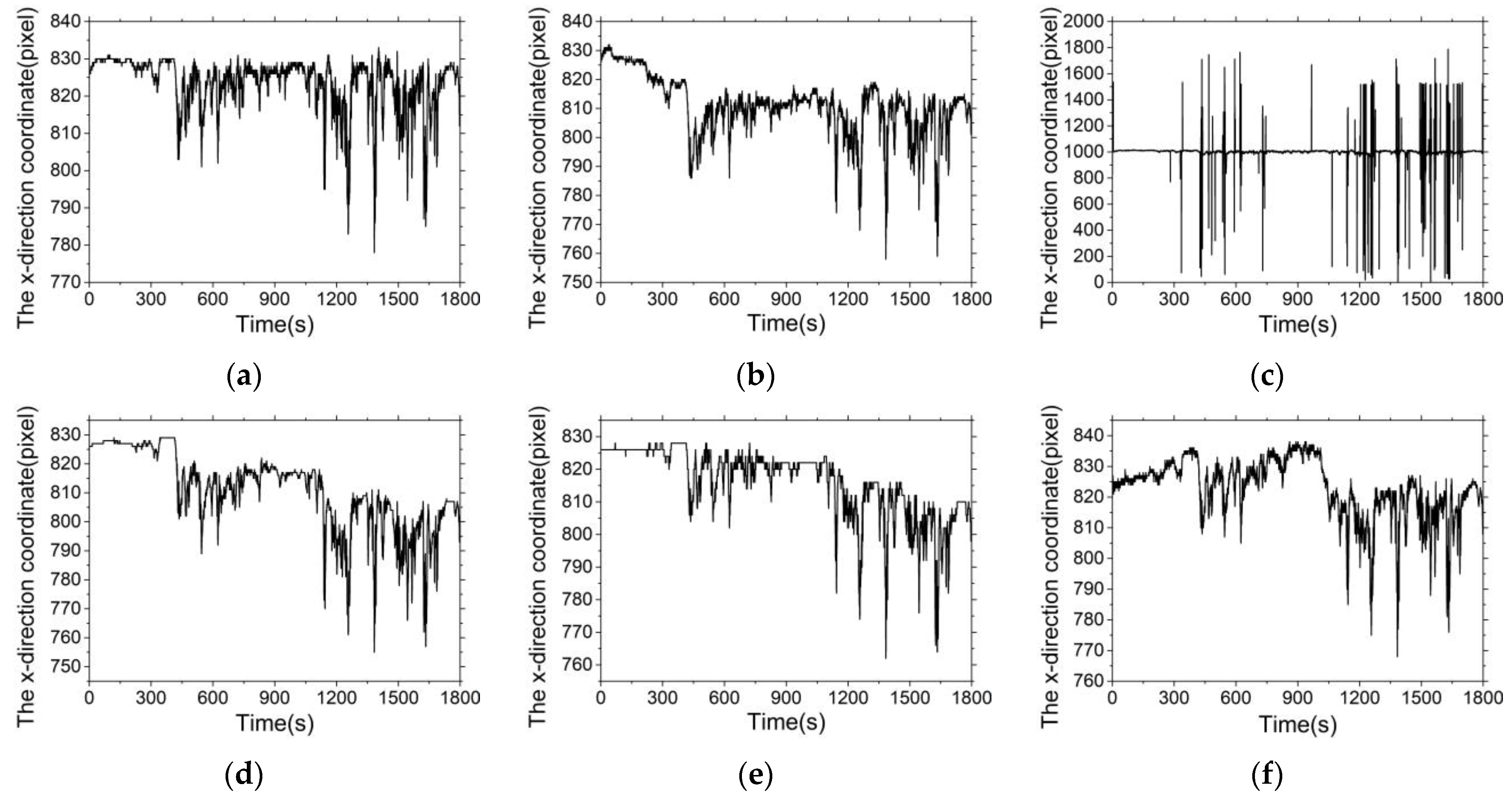
3.2.2. Tracking Situation
3.2.3. Frequency Measurement Results Based on Video Method
4. Discussion
5. Conclusions
- The speed of tree sway tracking of the six tracking methods from fast to slow was MOSSE, KCF, CSR-DCF, Boosting, MIL and TLD.
- The TLD algorithm was not suitable for tree sway tracking, and could not be used to measure the tree sway frequency. The tracking window of Boosting, MIL, MOSSE and KCF did not change in scale, and the tracking window of CSR-DCF changed in scale; these five algorithms did not lose the tracking object and can be used for tree sway tracking.
- In the measurement of the branch sway frequency under artificial excitation conditions, the Boosting, MIL and MOSSE methods can accurately measure the branch sway frequency to solve the problem of the contact sensor being difficult to install on thin branches, and its own weight may affect the measurement results.
- Based on Boosting, MIL, MOSSE, KCF and CSR-DCF methods, the sway frequency of trees can be accurately measured under environmental excitation conditions.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, A.; Yang, X.; Xin, D. The Tracking and Frequency Measurement of the Sway of Leafless Deciduous Trees by Adaptive Tracking Window Based on MOSSE. Forests 2022, 13, 81. [Google Scholar] [CrossRef]
- Yang, X.; Wang, A.; Jiang, H. Intelligent Measurement of Frontal Area of Leaves in Wind Tunnel Based on Improved U-Net. Electronics 2022, 11, 2730. [Google Scholar] [CrossRef]
- Bayat, M.; Ghorbanpour, M.; Zare, R.; Jaafari, A.; Pham, B.T. Application of Artificial Neural Networks for Predicting Tree Survival and Mortality in the Hyrcanian forest of Iran. Comput. Electron. Agric. 2019, 164, 104929. [Google Scholar] [CrossRef]
- Bayat, M.; Noi, P.T.; Zare, R.; Bui, D.T. A Semi-Empirical Approach Based on Genetic Programming for the Study of Biophysical Controls on Diameter-Growth of Fagus Orientalis in Northern Iran. Remote Sens. 2019, 11, 1680. [Google Scholar] [CrossRef]
- Bayat, M.; Bettinger, P.; Heidari, S.; Hamidi, S.K.; Jaafari, A. A Combination of Biotic and Abiotic Factors and Diversity Determine Productivity in Natural Deciduous Forests. Forests 2021, 12, 1450. [Google Scholar] [CrossRef]
- Bunce, A.; Volin, J.C.; Miller, D.R.; Parent, J.; Rudnicki, M. Determinants of tree sway frequency in temperate deciduous forests of the Northeast United States. Agric. For. Meteorol. 2019, 266–267, 87–96. [Google Scholar] [CrossRef]
- Lee, L.S.H.; Jim, C.Y. Applying precision triaxial accelerometer to monitor branch sway of an urban tree in a tropical cyclone. Landsc. Urban Plan. 2018, 178, 170–182. [Google Scholar] [CrossRef]
- Moore, J.R.; Maguire, D.A. Simulating the dynamic behavior of Douglas-fir trees under applied loads by the finite element method. Tree Physiol. 2008, 28, 75–83. [Google Scholar] [CrossRef]
- Spatz, H.C.; Brüchert, F.; Pfisterer, J. Multiple resonance damping or how do trees escape dangerously large oscillations? Am. J. Bot. 2007, 94, 1603–1611. [Google Scholar] [CrossRef]
- Kane, B.; Clouston, P. Tree pulling tests of large shade trees in the genus Acer. Arboric. Urban For. 2008, 34, 101–109. [Google Scholar] [CrossRef]
- Der Loughian, C.; Tadrist, L.; Allain, J.M.; Diener, J.; Moulia, B.; De Langre, E. Measuring local and global vibration modes in model plants. Comptes Rendus Mécanique 2014, 342, 1–7. [Google Scholar] [CrossRef]
- Li, Z.; Zhao, D.; Zhong, M. Measurement and finite element analysis of the dynamic characteristics of trees. J. Vib. Shock 2022, 41, 271–280. [Google Scholar]
- Van Emmerik, T.; Steele-Dunne, S.; Hut, R.; Gentine, P.; Guerin, M.; Oliveira, R.S.; Wagner, J.; Selker, J.; Van De Giesen, N. Measuring Tree Properties and Responses Using Low-Cost Accelerometers. Sensors 2017, 17, 1098. [Google Scholar] [CrossRef] [PubMed]
- Koizumi, A.; Shimizu, M.; Sasaki, Y.; Hirai, T. In situ drag coefficient measurements for rooftop trees. J. Wood Sci. 2016, 62, 363–369. [Google Scholar] [CrossRef]
- James, K.R.; Kane, B. Precision digital instruments to measure dynamic wind loads on trees during storms. Agric. For. Meteorol. 2008, 148, 1055–1061. [Google Scholar] [CrossRef]
- Baker, C.J. Measurements of the natural frequencies of trees. J. Exp. Bot. 1997, 48, 1125–1132. [Google Scholar] [CrossRef]
- Hassinen, A.; Lemettinen, M.; Peltola, H.; Kellomäki, S.; Gardiner, B. A prism-based system for monitoring the swaying of trees under wind loading. Agric. For. Meteorol. 1998, 90, 187–194. [Google Scholar] [CrossRef]
- Barbacci, A.; Diener, J.; Hémon, P.; Adam, B.; Donès, N.; Reveret, L.; Moulia, B. A robust videogrametric method for the velocimetry of wind-induced motion in trees. Agric. For. Meteorol. 2014, 184, 220–229. [Google Scholar] [CrossRef]
- He, P.; Hu, S.; He, D. Trajectory Capture and Sway Frequency Analysis of Trees Based on Kinect. J. Syst. Simul. 2017, 29, 1411–1418. [Google Scholar]
- Chau, W.Y.; Loong, C.N.; Wang, Y.H.; Chiu, S.W.; Tan, T.J.; Wu, J.; Leung, M.L.; Tan, P.S.; Ooi, G.L. Understanding the dynamic properties of trees using the motions constructed from multi-beam flash light detection and ranging measurements. J. R. Soc. Interface 2022, 19, 20220319. [Google Scholar] [CrossRef]
- Bouguet, J.Y. Pyramidal Implementation of the Lucas Kanade Feature Tracker Description of the Algorithm; Intel Corporation Microprocessor Research Labs: Santa Clara, CA, USA, 2000. [Google Scholar]
- Xue, T.; Wu, J.; Zhang, Z.; Zhang, C.; Tenenbaum, J.B.; Freeman, W.T. Seeing Tree Structure from Vibration. Computer Vision. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 762–779. [Google Scholar]
- Bolme, D.S.; Beveridge, J.R.; Draper, B.A.; Lui, Y.M. Visual object tracking using adaptive correlation filters. In Proceedings of the Twenty-Third IEEE Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; pp. 13–18. [Google Scholar]
- Li, X.; Zha, Y.; Zhang, T.; Cui, Z.; Zuo, W.; Hou, Z.; Lu, H.; Wang, H. Survey of visual object tracking algorithms based on deep learning. J. Image Graph. 2019, 24, 2057–2080. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. Commun. ACM 2012, 60, 84–90. [Google Scholar] [CrossRef]
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter; University of North Carolina at Chapel Hill: Chapel Hill, NC, USA, 2001. [Google Scholar]
- Nummiaro, K.; Koller-Meier, E.; Van, G.L. An adaptive color-based particle filter. Image Vis. Comput. 2003, 21, 99–110. [Google Scholar] [CrossRef]
- Comaniciu, D.; Ramesh, V.; Meer, P. Real-time tracking of non-rigid objects using mean shift. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. CVPR 2000 (Cat. No.PR00662), Hilton Head, SC, USA, 15 June 2000; pp. 142–149. [Google Scholar]
- Exner, D.; Bruns, E.; Kurz, D.; Grundhöfer, A.; Bimber, O. Fast and robust CAMShift tracking. In Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition-Workshops, San Francisco, CA, USA, 13–18 June 2010; pp. 9–16. [Google Scholar]
- Choi, J.Y.; Sung, K.S.; Yang, Y.K. Multiple Vehicles Detection and Tracking based on Scale-Invariant Feature Transform. In Proceedings of the 2007 IEEE Intelligent Transportation Systems Conference, Bellevue, WA, USA, 30 September–3 October 2007; pp. 528–533. [Google Scholar]
- Bay, H.; Tuytelaars, T.; Van, G.L. SURF: Speeded Up Robust Features. Lect. Notes Comput. Sci. 2016, 3951, 404–417. [Google Scholar]
- Grabner, H.; Grabner, M.; Bischof, H. Real-Time Tracking via On-line Boosting. In Proceedings of the British Machine Vision Conference, Edinburgh, UK, 4–7 September 2006. [Google Scholar]
- Babenko, B.; Yang, M.H.; Belongie, S. Visual tracking with online Multiple Instance Learning. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 983–990. [Google Scholar]
- Kalal, Z.; Mikolajczyk, K.; Matas, J. Tracking-Learning-Detection. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 1409–1422. [Google Scholar] [CrossRef]
- Henriques, J.F.; Caseiro, R.; Martins, P.; Batista, J. Exploiting the Circulant Structure of Tracking-by-Detection with Kernels. In Proceedings of the Computer Vision-ECCV 2012, Florence, Italy, 7–13 October 2012; pp. 702–715. [Google Scholar]
- Danelljan, M.; Häger, G.; Khan, F.S.; Felsberg, M. Accurate Scale Estimation for Robust Visual Tracking. In Proceedings of the British Machine Vision Conference, Nottingham, UK, 1–5 September 2014. [Google Scholar]
- Henriques, J.F.; Caseiro, R.; Martins, P.; Batista, J. High-Speed Tracking with Kernelized Correlation Filters. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 583–596. [Google Scholar] [CrossRef]
- Galoogahi, H.K.; Fagg, A.; Lucey, S. Learning Background-Aware Correlation Filters for Visual Tracking. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 1144–1152. [Google Scholar]
- Lukežič, A.; Vojíř, T.; Čehovin, Z.L.; Matas, J.; Kristan, M. Discriminative Correlation Filter Tracker with Channel and Spatial Reliability. Int. J. Comput. Vis. 2018, 126, 671–688. [Google Scholar] [CrossRef]
- Bibi, A.; Mueller, M.; Ghanem, B. Target Response Adaptation for Correlation Filter Tracking. Lect. Notes Comput. Sci. 2016, 9910, 419–433. [Google Scholar]
- Yun, S.; Choi, J.; Yoo, Y.; Yun, K.; Choi, J.Y. Action-Decision Networks for Visual Tracking with Deep Reinforcement Learning. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 1349–1358. [Google Scholar]
- Nam, H.; Han, B. Learning Multi-domain Convolutional Neural Networks for Visual Tracking. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 4293–4302. [Google Scholar]
- Nam, H.; Baek, M.; Han, B. Modeling and Propagating CNNs in a Tree Structure for Visual Tracking. arXiv 2016, arXiv:1608.07242. [Google Scholar]
- Moore, J.R.; Maguire, D.A. Natural sway frequencies and damping ratios of trees: Influence of crown structure. Trees 2005, 19, 363–373. [Google Scholar] [CrossRef]
- Xin, D.; Jiang, H.; Zhang, H. Measurement on wind field characteristics and wind-induced dynamic response in broadleaved forest. Acta Aerodyn. Sin. 2022, 40, 110–121. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tracking Method | Boosting | MIL | TLD | MOSSE | KCF | CSR-DCF | |
|---|---|---|---|---|---|---|---|
| Tracking time (s) | Group 1 | 54.15 | 63.73 | 142.34 | 9.63 | 21.82 | 31.89 |
| Group 2 | 51.53 | 63.23 | 143.80 | 9.50 | 21.08 | 35.41 | |
| Group 3 | 47.52 | 64.49 | 164.00 | 9.52 | 20.26 | 41.13 | |
| Average | 51.07 | 63.82 | 150.05 | 9.55 | 21.05 | 36.14 | |
| Tracking Method | Laser Displacement Sensor | Video | |||||
|---|---|---|---|---|---|---|---|
| Boosting | MIL | MOSSE | KCF | CSR-DCF | |||
| Group 1 | First-order frequency (Hz) | 2.31 | 2.32 | 2.31 | 2.31 | / | 4.75 |
| Second-order frequency (Hz) | 4.63 | 4.63 | / | 7.00 | / | / | |
| Third-order frequency (Hz) | 9.26 | 11.58 | / | 11.62 | / | / | |
| Group 2 | First-order frequency (Hz) | 2.32 | 2.31 | 2.30 | 2.32 | / | 6.64 |
| Second-order frequency (Hz) | 4.62 | 6.78 | / | 3.35 | / | / | |
| Third-order frequency (Hz) | 6.95 | 11.24 | / | / | / | / | |
| Group 3 | First-order frequency (Hz) | 2.31 | 2.31 | 2.32 | 2.30 | / | / |
| Second-order frequency (Hz) | 4.62 | 7.00 | / | 7.01 | / | / | |
| Third-order frequency (Hz) | 6.92 | 11.62 | / | 11.60 | / | / | |
| Fourth-order frequency (Hz) | 9.23 | / | / | / | / | / | |
| Tracking Method | Boosting | MIL | TLD | MOSSE | KCF | CSR-DCF |
|---|---|---|---|---|---|---|
| Average tracking time of P1 (s) | 733.98 | 1073.18 | 2246.29 | 457.72 | 532.58 | 713.97 |
| Average tracking time of P2 (s) | 742.43 | 1077.13 | 2582.75 | 460.72 | 531.80 | 700.99 |
| Total Average tracking time (s) | 738.21 | 1075.16 | 2414.52 | 459.22 | 532.19 | 707.48 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Wang, A.; Pang, P. The Performance of Discriminative Tracking Algorithms for the Sway Frequency Measurement of Betula platyphylla Sukaczev (Individual Branch and Tree) under Artificial and Natural Excitation. Forests 2023, 14, 2196. https://doi.org/10.3390/f14112196
Yang X, Wang A, Pang P. The Performance of Discriminative Tracking Algorithms for the Sway Frequency Measurement of Betula platyphylla Sukaczev (Individual Branch and Tree) under Artificial and Natural Excitation. Forests. 2023; 14(11):2196. https://doi.org/10.3390/f14112196
Chicago/Turabian StyleYang, Xinnian, Achuan Wang, and Peng Pang. 2023. "The Performance of Discriminative Tracking Algorithms for the Sway Frequency Measurement of Betula platyphylla Sukaczev (Individual Branch and Tree) under Artificial and Natural Excitation" Forests 14, no. 11: 2196. https://doi.org/10.3390/f14112196
APA StyleYang, X., Wang, A., & Pang, P. (2023). The Performance of Discriminative Tracking Algorithms for the Sway Frequency Measurement of Betula platyphylla Sukaczev (Individual Branch and Tree) under Artificial and Natural Excitation. Forests, 14(11), 2196. https://doi.org/10.3390/f14112196