
A Multistage Stochastic Program to Optimize Prescribed Burning Locations Using Random Fire Samples †


Abstract
:1. Introduction
2. Materials and Methods
2.1. The Structure of the Stochastic Program
2.2. Key Components and Major Assumptions of the Stochastic Program
2.3. General Mathematical Formulation
2.3.1. Define Objective Function
2.3.2. Model Fire Management Decisions
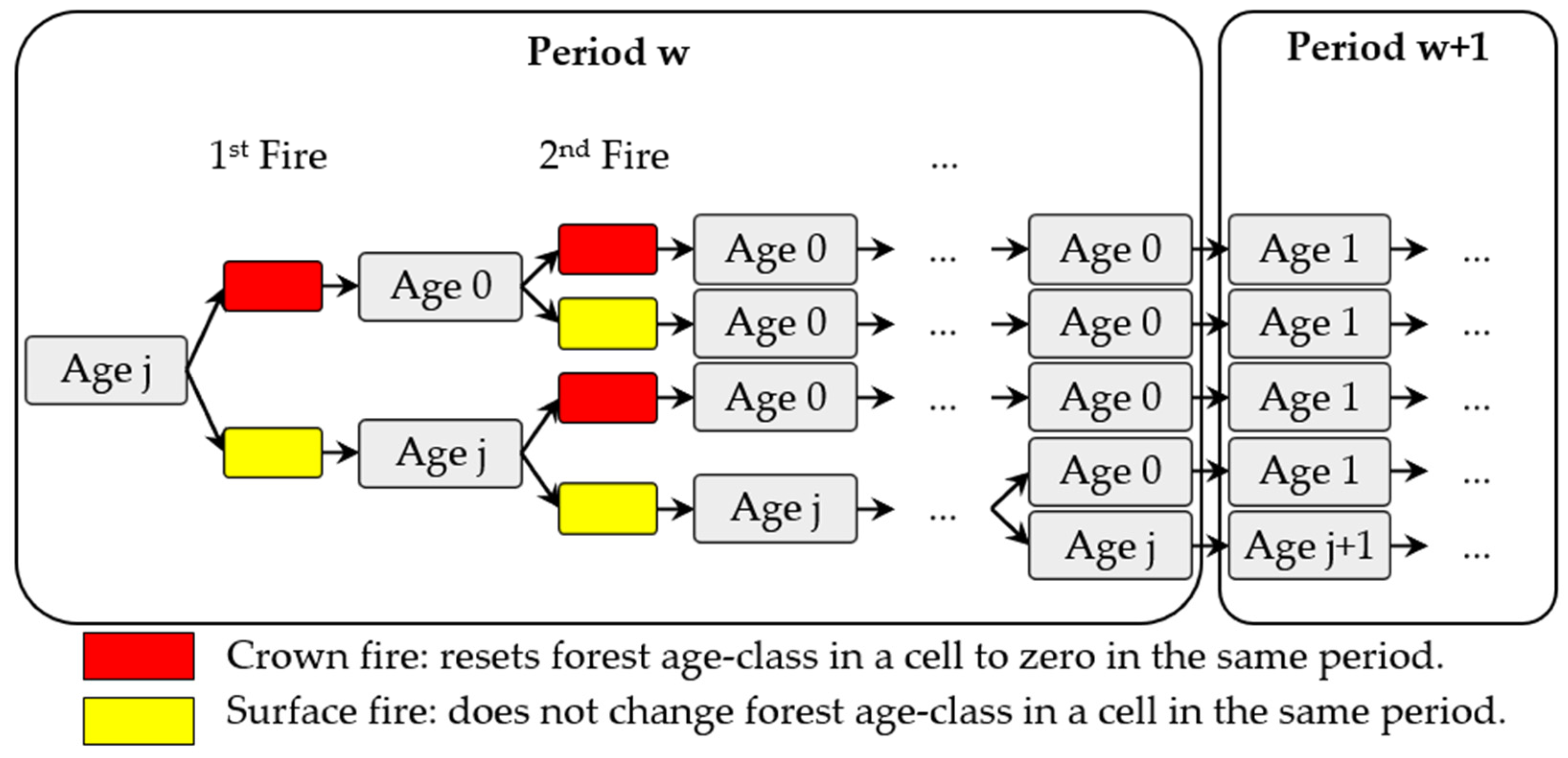
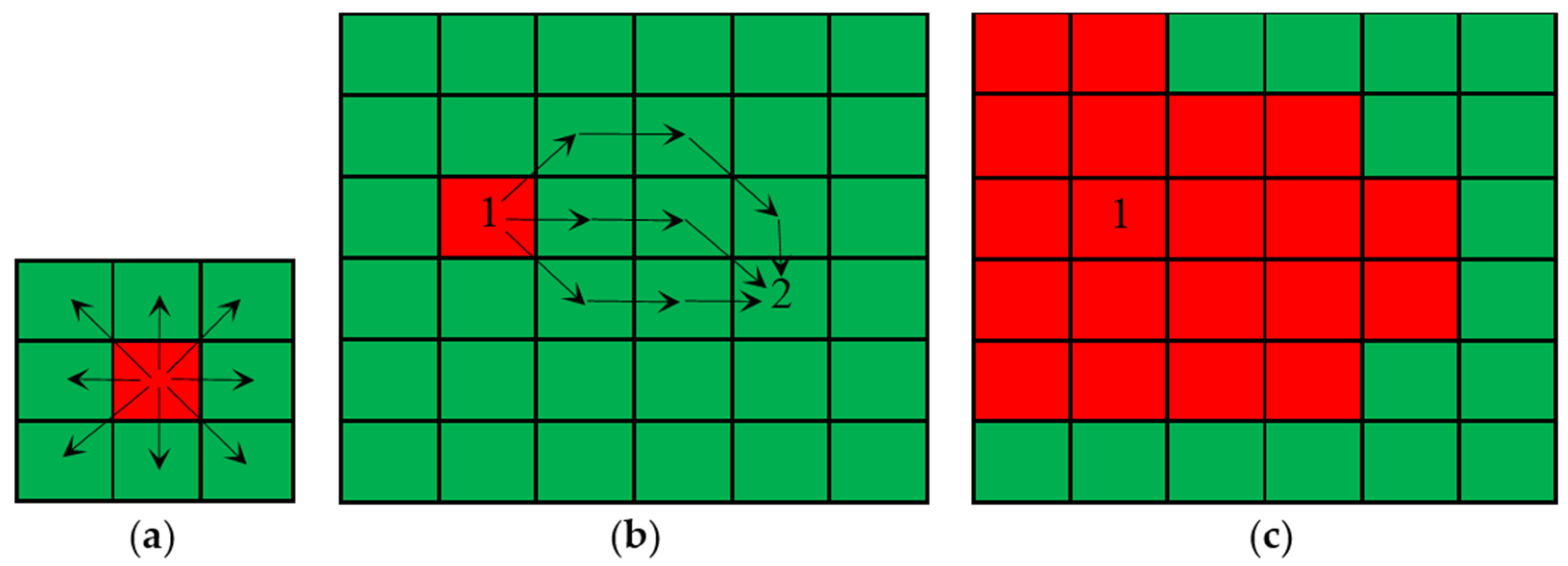
2.3.3. Model Wildfire Spread
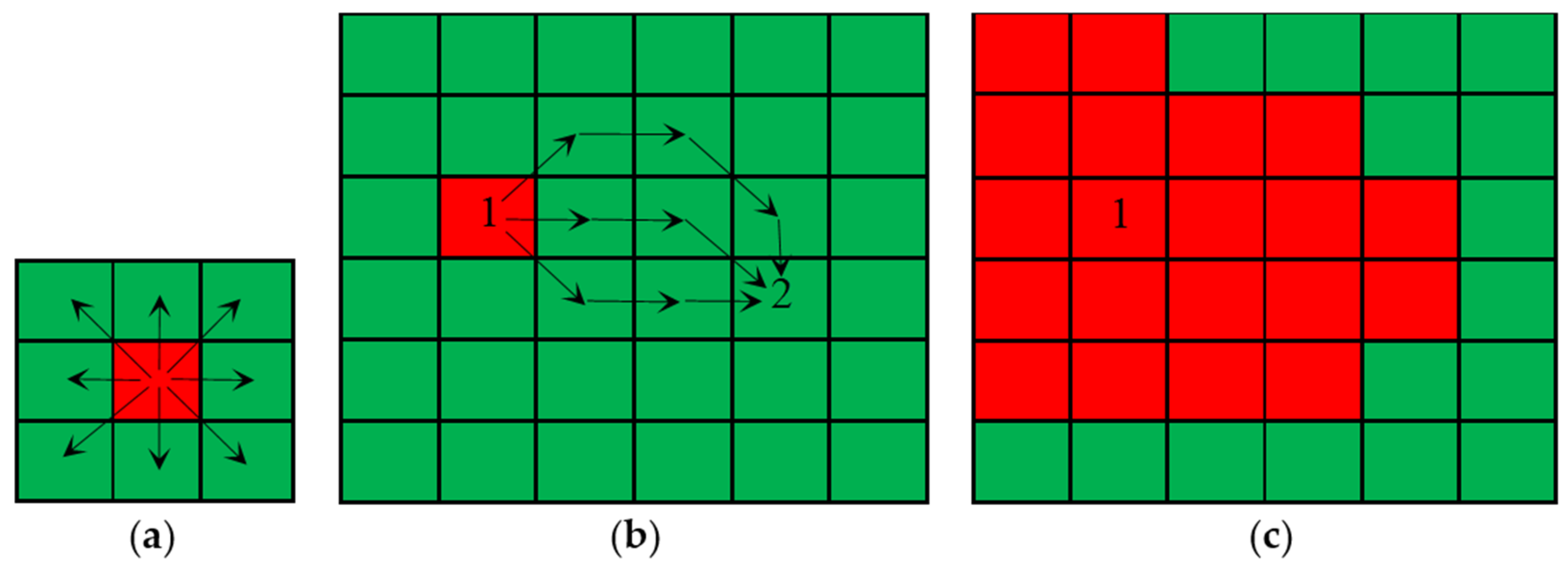
- Equation (17) identifies the “upper bound” for the MFAT of cell . Fire cannot arrive the center of cell later than the MFAT of any of its adjacent cells () plus the spread time from the center of to the center of . If the fire does not burn cell () or if fire control effort is put in cell (), the “Big M” will guarantee that the upper bound will not be set.
- Equation (18) identifies the “lower bound” for the MFAT of cell . Fire cannot arrive the center of cell earlier than the MFAT of any of its adjacent cells () plus the spread time from the center of to the center of . If the fire cannot spread from to (), the “Big M” will guarantee that the lower bound will not be set.
- The exact MFAT of cell can be identified when the upper bound and the lower bound are set and converged (equal values); Otherwise, the MFAT of cell will be assigned a very large number to indicate fire would not burn that cell.
2.3.4. Estimate Fire Damages and Consequences of Prescribed Burning and Fire Suppression
3. Test Cases
3.1. Testing Landscape and Assumptions
- Low FPV: and
- High FPV: and
3.2. Test Cases Designs
- Would changing sample size N have significant impact on the quality of the FT1s?
- Would some of the FT1 solutions be significantly better than the others?
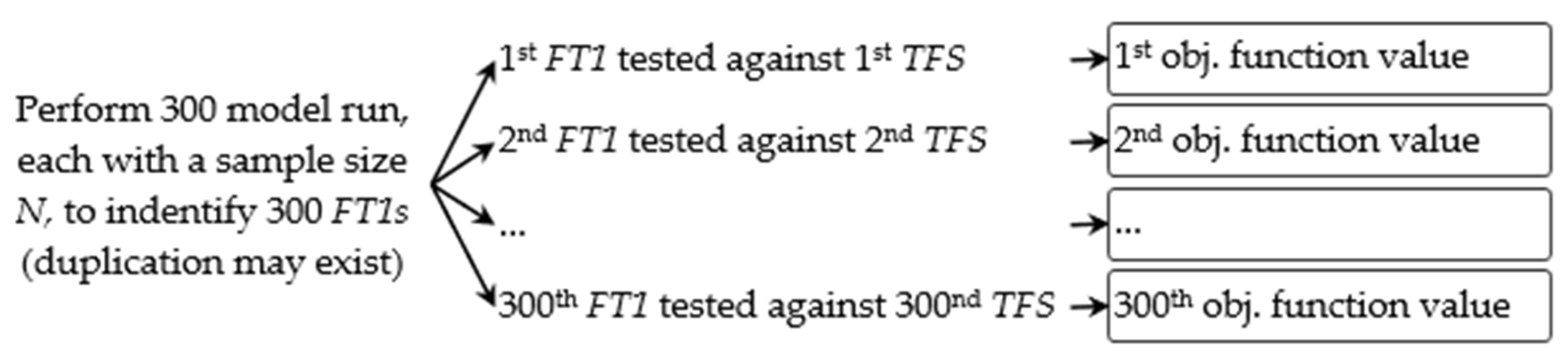
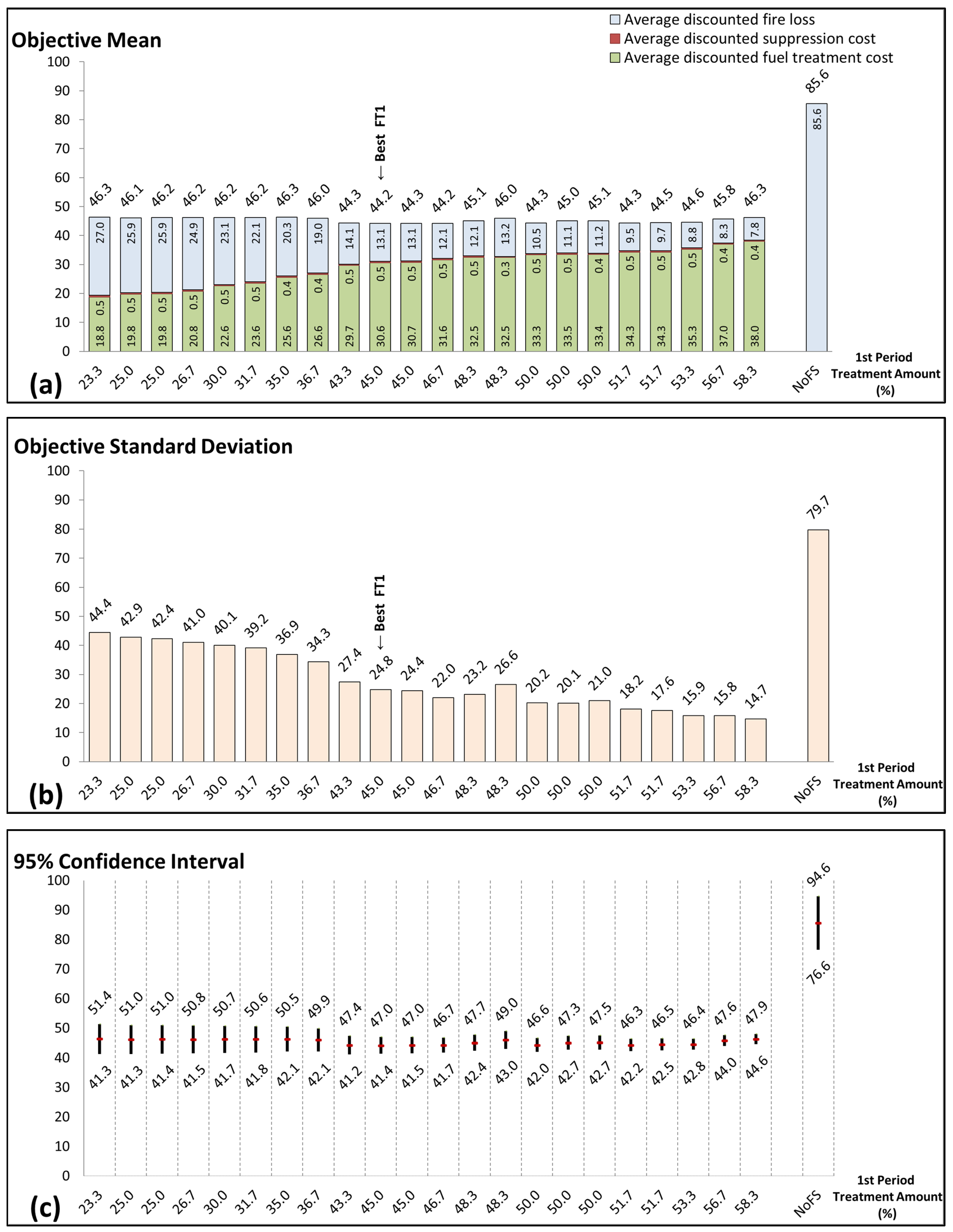
- Test case 1—Examining the impact of sample size on the quality of the first period prescribed burning solutions (Figure 5). For every preselected sample size N, 300 stochastic model runs were conducted to identify a pool of 300 FT1s. An additional run was performed to test each FT1 solution in this pool against a random TFS in the fire testing set. An already tested TFS would not be used again to test another FT1 in this pool. When testing each FT1 solution against each TFS, the first period prescribed burning decision was hardcoded, but recourse decisions (both prescribed burning and fire suppression in later periods) were allowed to change to adapt to that TFS. The mean, standard deviation, and confidence interval of the objective function values from testing each pool of FT1s associated with a specific sample size N were calculated.
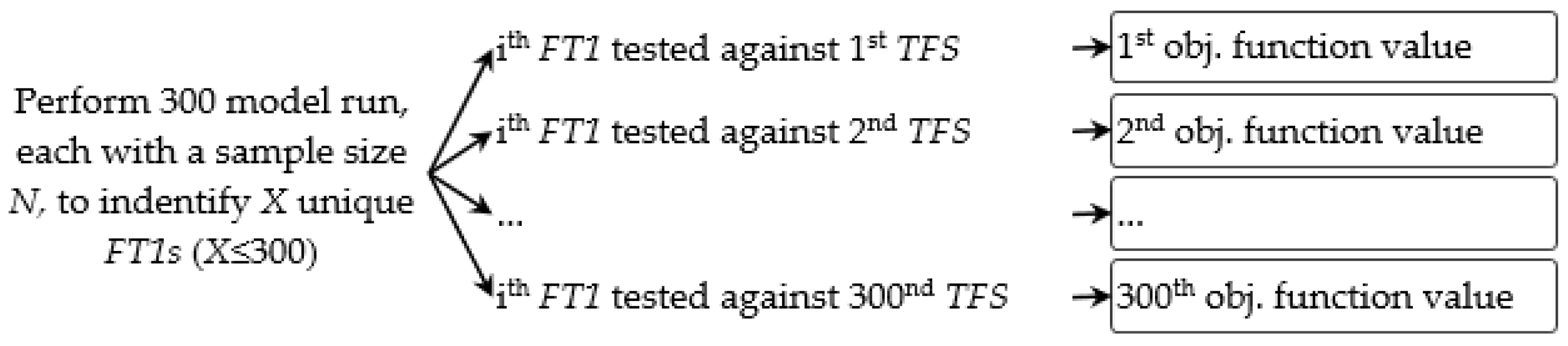
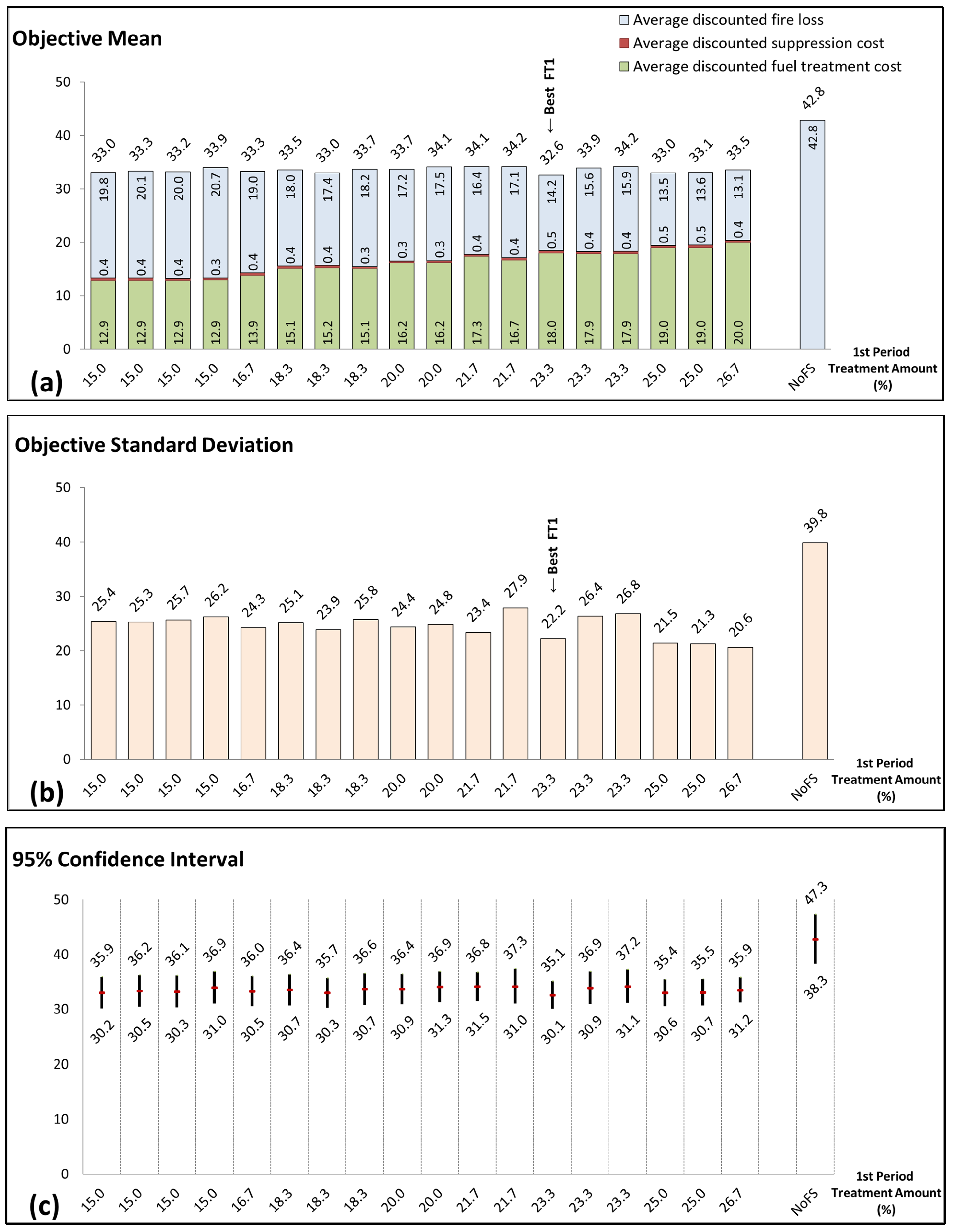
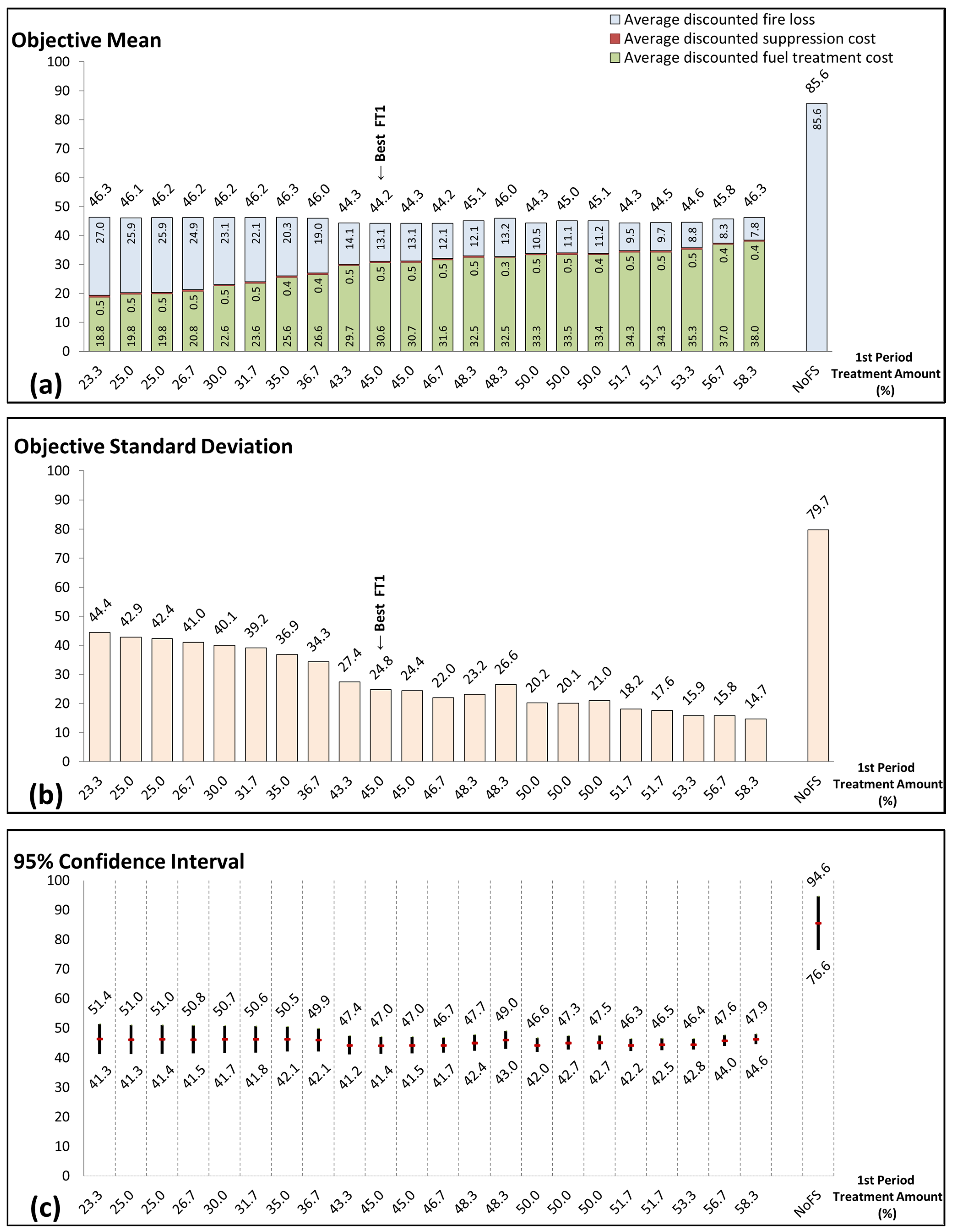
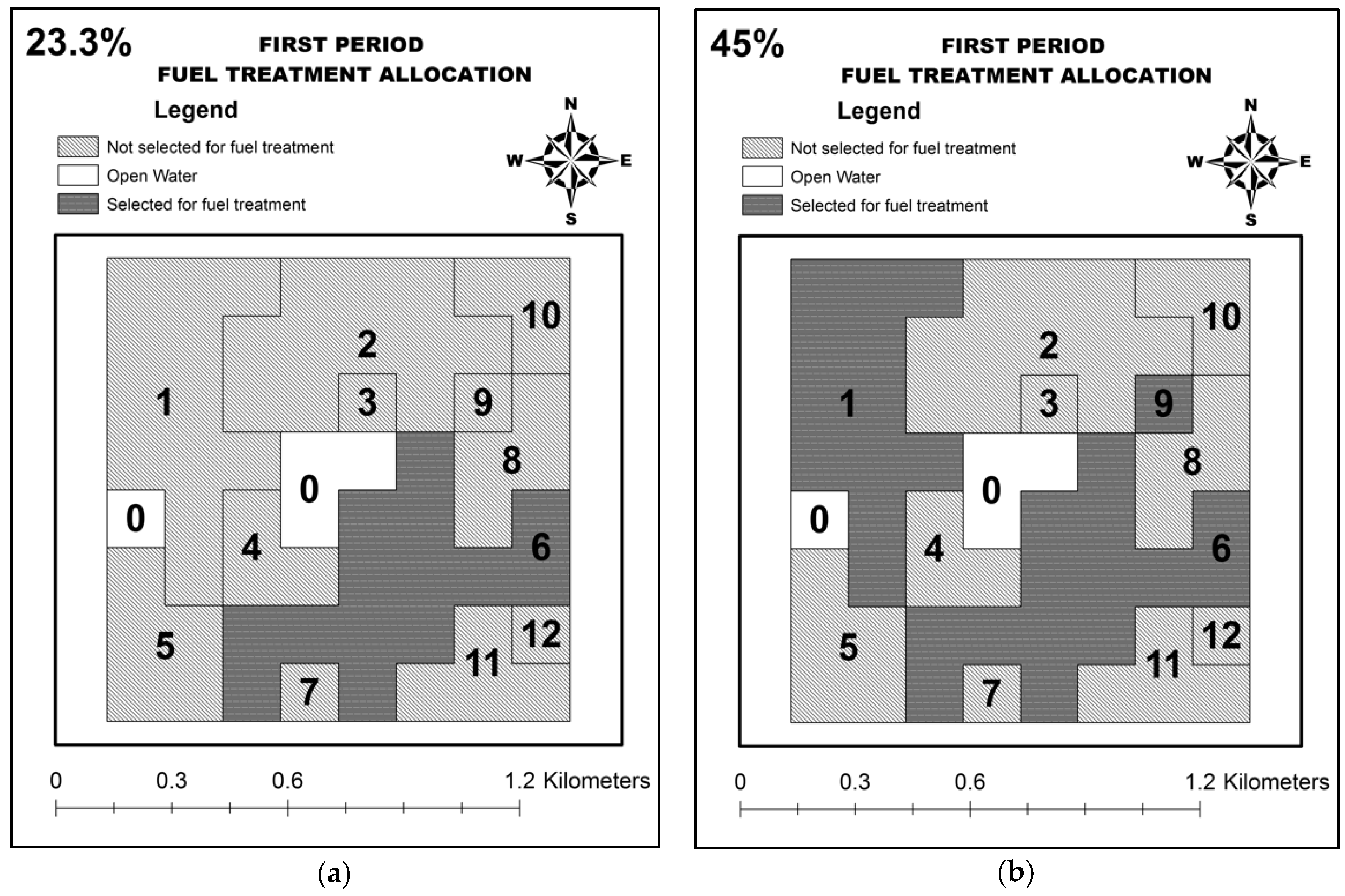
- Test case 2—Examining the quality of period one prescribed burning decisions (Figure 6). For this test case, we ran the stochastic program 300 times with a preselected sample size N and evaluate all of the unique FT1s generated from these runs. Duplicated FT1s might exist, so the number of unique FT1s would be less than 300. The performance of each unique FT1 was also evaluated by using the fire testing set. The testing process would require 300 new model runs where sample size is set to one. In each run, the same unique FT1 solution was hardcoded and tested against a different TFS. The mean, standard deviation, and confidence interval of the objective function values from testing each unique FT1 was calculated to evaluate the quality of the FT1. Paired-t-tests were used to compare the quality of different unique FT1s.
4. Results
4.1. Reference Test Case: No Fuel Treatment and Suppression
4.2. Test case 1: Impact of Sample Size on the Quality of the First Period Prescribed Burning Solutions
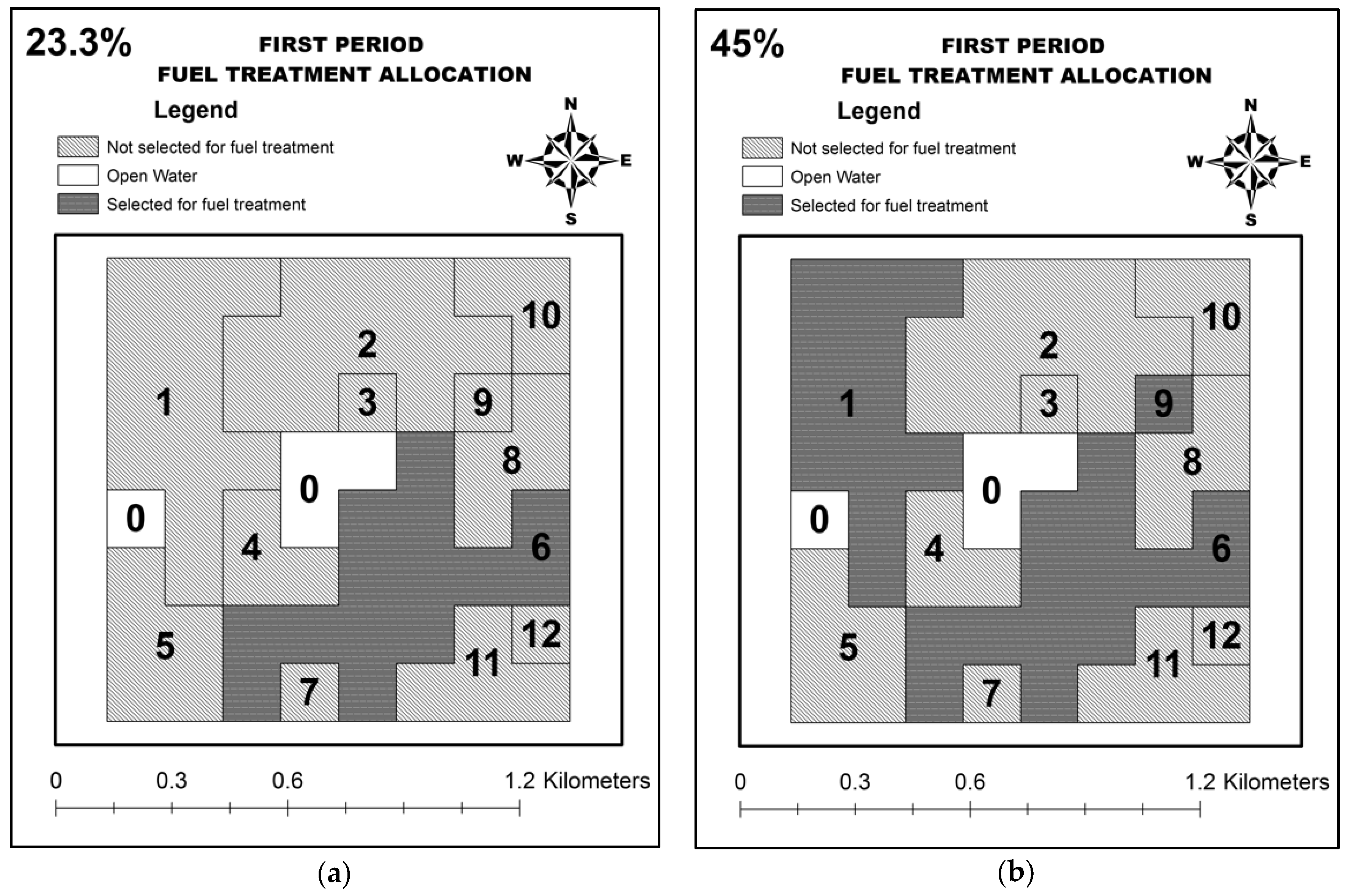
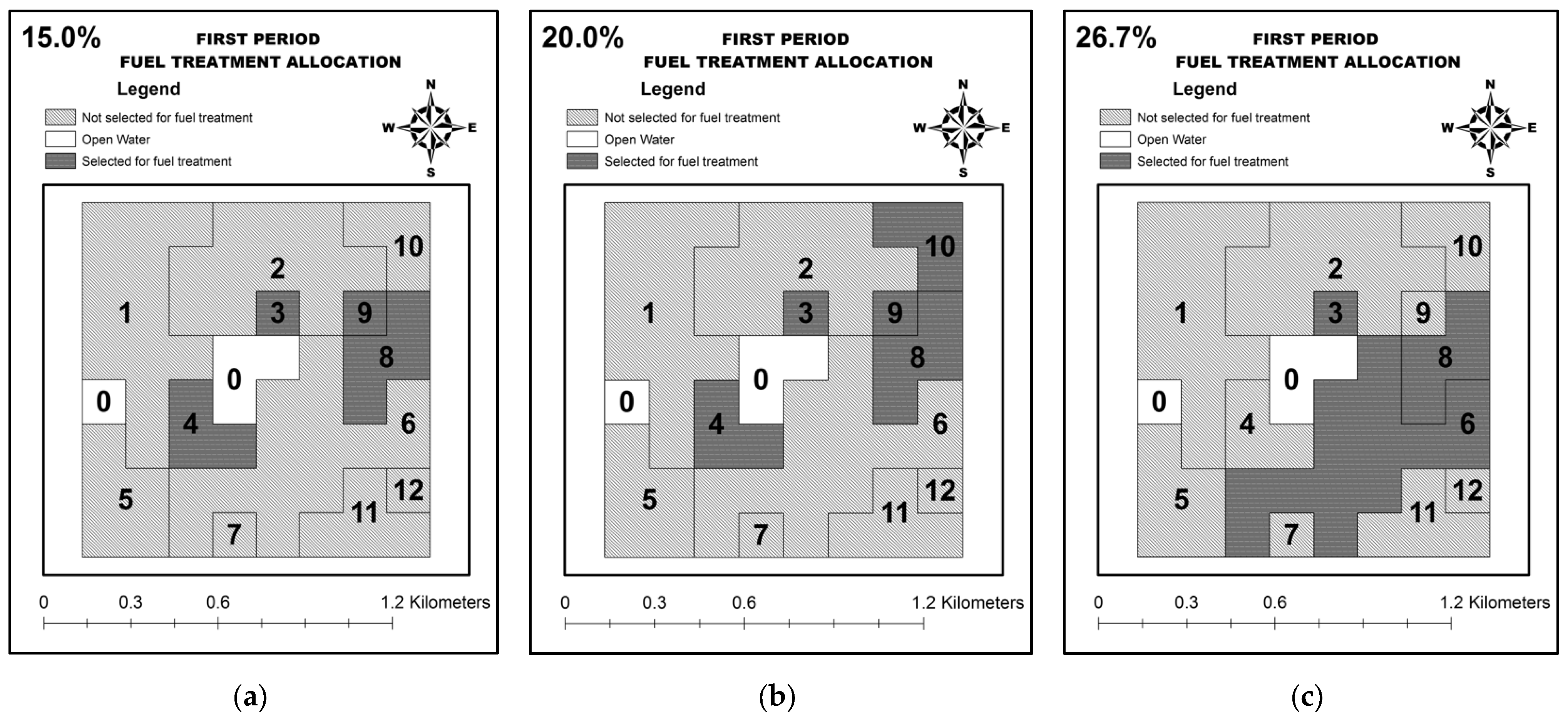
4.3. Test Case 2: Quality of the First Period Prescribed Burning Decisions
5. Conclusions and Discussion
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
A.1. Notations Used in the Stochastic Program Formulation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Abbreviations | Definition |
|---|---|
| BEs | The beneficial effects of prescribed burning or wildfire. For example, areas recently treated by prescribed fire or burned by wildfire can decrease future fire intensity. These effects might last for certain period. |
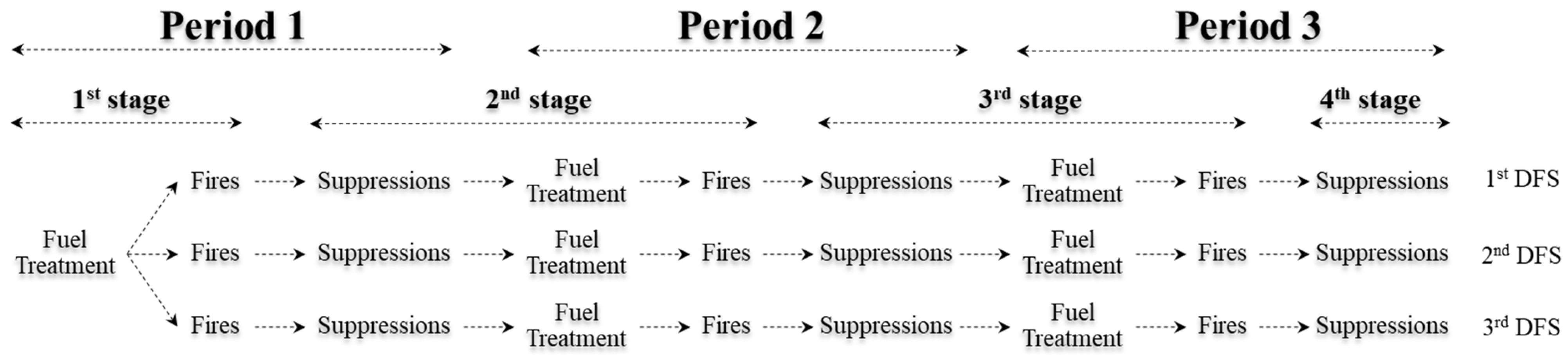
| DFS | A sequence of prescribed burning decisions, random fire events, and fire suppression decisions across all planning periods as illustrated in Figure 1. |
| FT1 | The first period prescribed burning solution that includes a set of stands selected for prescribed burning at the beginning of the first period. |
| MFAT | The “minimum fire arrival time” to each location (i.e., a cell) in a landscape. MFAT is calculated for every sample fire and every raster cell in the modeled landscape. |
| MSR | The “maximum spread range” of a sample fire calculated by a preprocessing algorithm (Appendix A.2) |
| Indices | Definition |
| Index of a stand. | |
| Index of the stand that contains the raster cell . | |
| Indices of raster cells. | |
| The occurrence order of sample fires in a planning period. For example, in a specific planning period a fire indexed by would occur before the fire indexed by. | |
| Index of age-class of the forest in a raster cell. | |
| Indices of DFS samples. | |
| Index of a planning period. | |
| An ordered set denotes the three attributes of a sample fire: is the planning period when this fire occurs; is the occurrence order of this fire in period ; and is the DFS in which this fire belongs. | |
| Parameters | Definition |
| Half of the distance for a fire to spread from the center of cell to the center of its adjacent cell . | |
| A small positive number. | |
| The total number of cells within stand . | |
| The total number of adjacent cells of the cell . | |
| The critical threshold of fire line intensity in cell when this cell is in age-class at occurrence time of fire . The fire becomes crown fire in cell when it burns cell with the estimated fire line intensity meeting or exceeding this threshold. | |
| The fire line intensity in cell if fire spreads from into at spread rate | |
| The fire line intensity in cell if fire spreads from into at spread rate | |
| A binary parameter: 1 if fire ignites in cell ; 0 if not. | |
| The active spread duration of fire determined exogenously through a random draw. | |
| The time of occurrence (i.e., year) of sample fire . | |
| The time (i.e., year) at the beginning of period when prescribed burning is scheduled (e.g., in case using 10-year planning period: , , and ). | |
| A large positive number (Big M). | |
| The total number of DFS samples. In this paper, the term “sample size” is used to represent . | |
| The cost of prescribed burning in a cell if that cell has been neither treated by prescribed fire within planning periods nor burned within planning periods. | |
| The cost of prescribed burning in a cell if that cell has been treated by prescribed fire within planning periods or burned within planning periods. We assume . | |
| The cost for fire control effort in cell during suppression of a fire. | |
| An adopted annual discount rate. | |
| is the estimated spread rate of fire in cell when this fire spreads into c from its adjacent cell . If cell is still influenced by the BEs of previous prescribed burning or wildfires, the spread rate in this cell would be | |
| is the estimated spread rate of fire in cell when this fire spreads from to its adjacent cell . If cell is still influenced by the BEs of previous prescribed burning or wildfires, the spread rate in this cell would be | |
| The value to be protected in cell when the forest in this cell is in age-class. | |
| Fire loss in cell if the forest in this cell is in age-class at occurrence time of fire and this fire burns as surface fire in c. | |
| The total number of planning periods in the entire planning horizon. | |
| The number of continuous planning periods in which the BEs from prescribed burning would last. | |
| The number of continuous planning periods in which the BEs from wildfire would last. | |
| Sets | Definition |
| The set of all stands in a landscape. | |
| The set of all cells in a landscape. | |
| The set of flammable cells inside the MSR of fire . | |
| The set of all cells in stand . | |
| The set of adjacent cells to cell (sharing an edge or a vertex with , excluding non-flammable cells). | |
| The ignition cell of fire exogenously selected by random draws. | |
| The set of cells that are either non-flammable or outside the MSR of fire . | |
| Variables | Definition |
| A binary variable: 1 if fire successfully spreads from cell into its adjacent cell , and the spread path from to must belong to the fastest spread route of this fire to ; 0 if not. | |
| A binary variable: 1 if fire burns cell ; 0 if not. | |
| A continuous variable to calculate the fire line intensity in cell if it is burned by fire when this fire spreads following its fastest spread route into cell . | |
| A continuous variable to calculate the total discounted fire loss for the nth DFS. | |
| A continuous variable to calculate the total discounted cost of prescribed burning for the nth DFS. | |
| A continuous variable to calculate the total discounted cost of prescribed burning scheduled in period for the nth DFS. | |
| A continuous variable to calculate the total discounted cost of building fire-control-line for the nth DFS. | |
| A binary variable: 1 if either fire does not burn cell or it burns as surface fire in cell ; 0 if fire burns as crown fire in cell . | |
| A binary variable: 1 if at occurrence time of fire , cell has been treated by prescribed fire within planning periods or burned within planning periods; 0 if not. | |
| A binary variable: 1 if the forest in cell is in age-class at occurrence time of fire ; 0 if not. | |
| A binary variable: 1 if fire control effort is put into cell to protect that cell from being burned by fire; 0 if not. | |
| For the nth DFS, this integer variable calculates the total number of cells in stand in period that have not been treated by prescribed fire within planning periods and burned within planning periods. | |
| A continuous variable to track the MFAT of cell , which is calculated based on the fastest route for fire to spread into the center of . | |
| A binary variable: 1 if fire burns as crown fire in cell and this cell is in age-class at occurrence time of fire ; 0 if not. | |
| A binary variable: 1 if fire burns as surface fire in cell and this cell is in age-class at occurrence time of fire ; 0 if not. | |
| A binary variable: 1 if prescribed burning is implemented at the beginning of period in stand in the nth DFS; 0 if not. | |
| A binary variable: 1 if either fire control effort has been put in cell or the MFAT for fire arriving the center of cell is greater than that fire’s active spread-duration; 0 if not. | |
| A binary variable: 1 if at the beginning of period in the nth DFS, cell is identified as not being treated by prescribed fire within planning periods or burned within planning periods; 0 if not. |
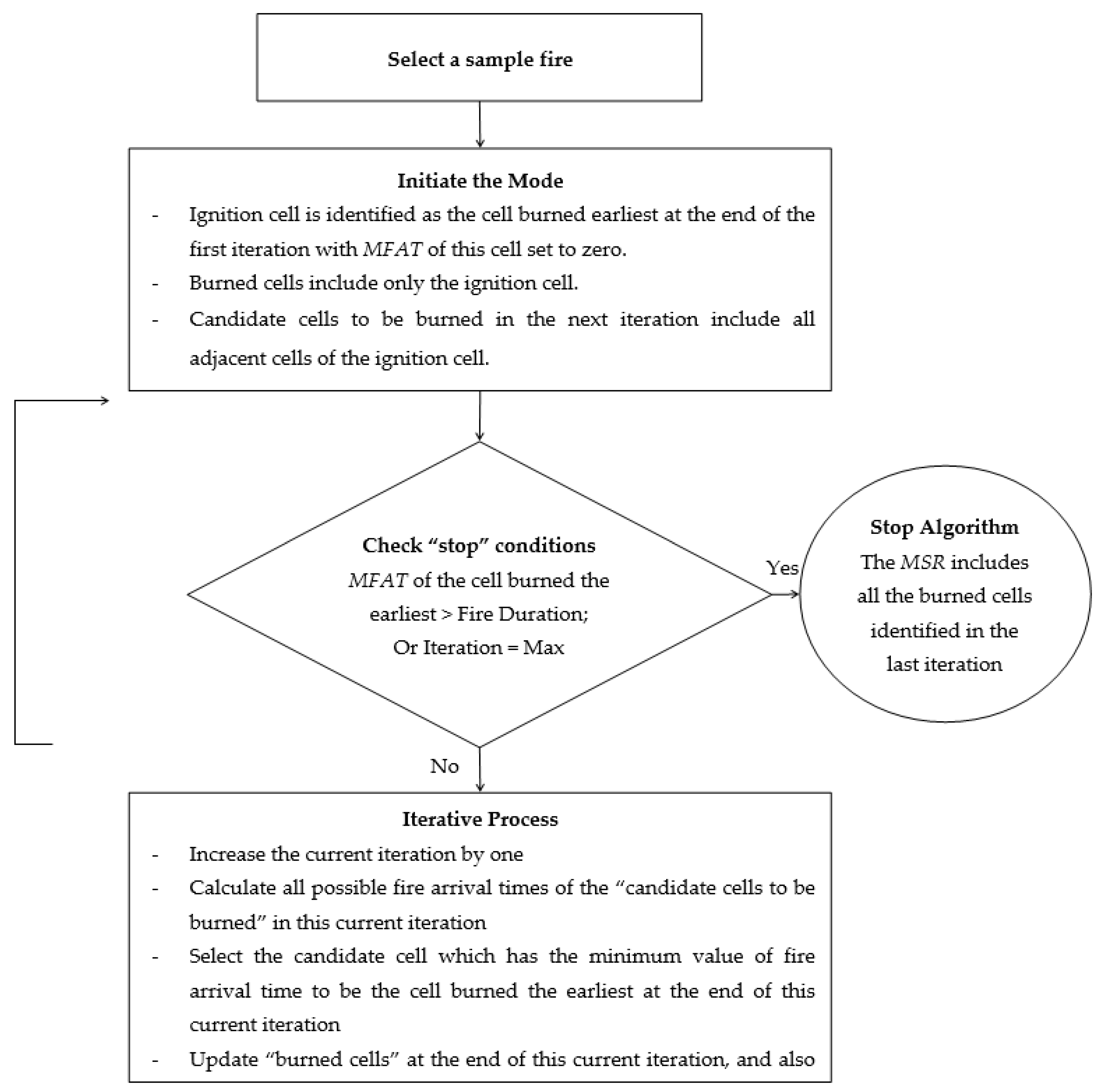
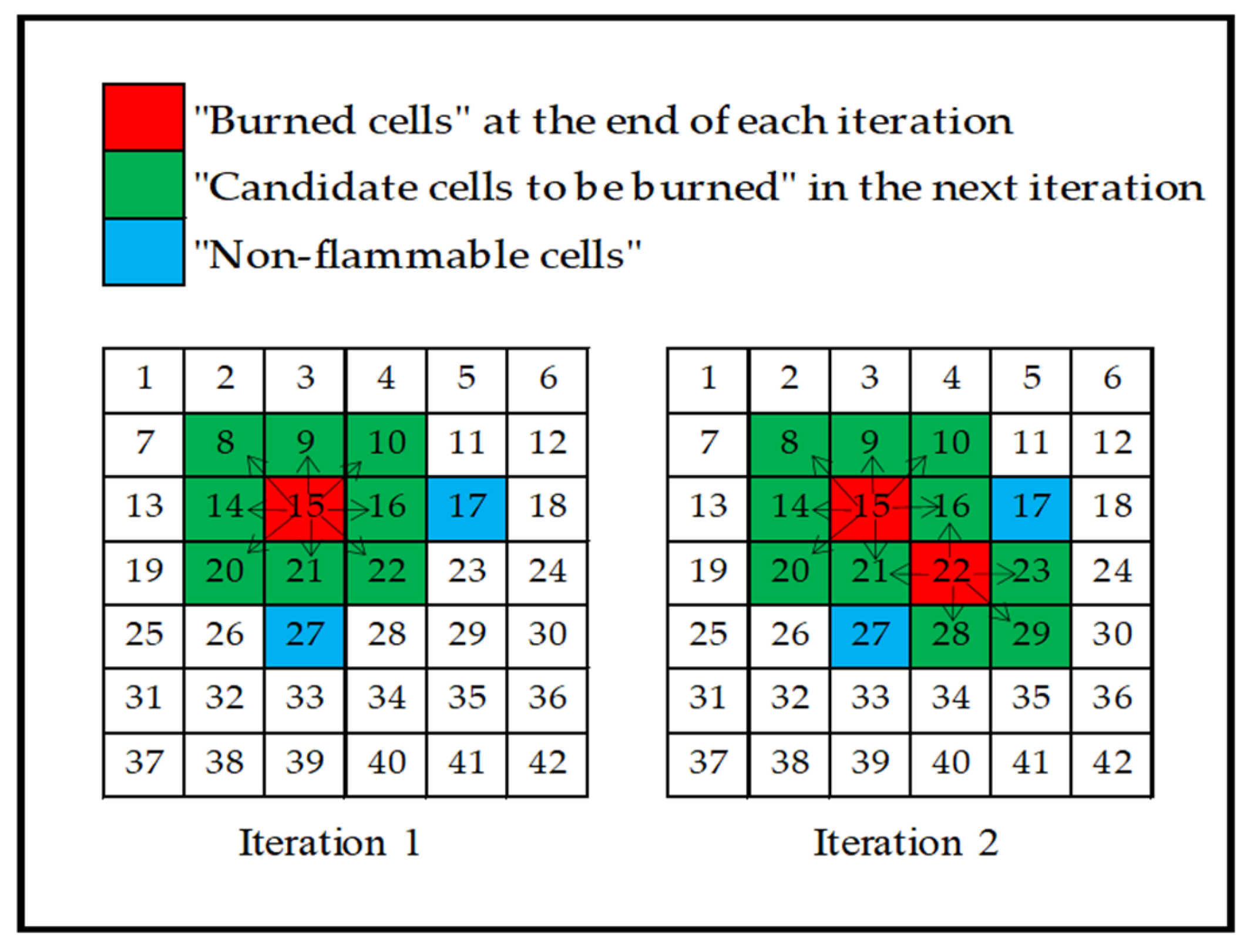
A.2. A preprocessing Algorithm to Calculate the Maximum Spread Range (MSR) of a Sample Fire


A.3. Book-Keeping Variables and Constraints Used in the Stochastic Program Formulation
- : A binary variable receiving a value of one if at least one crown fire has occurred in cell c in period before occurrence time of fire ; otherwise, .
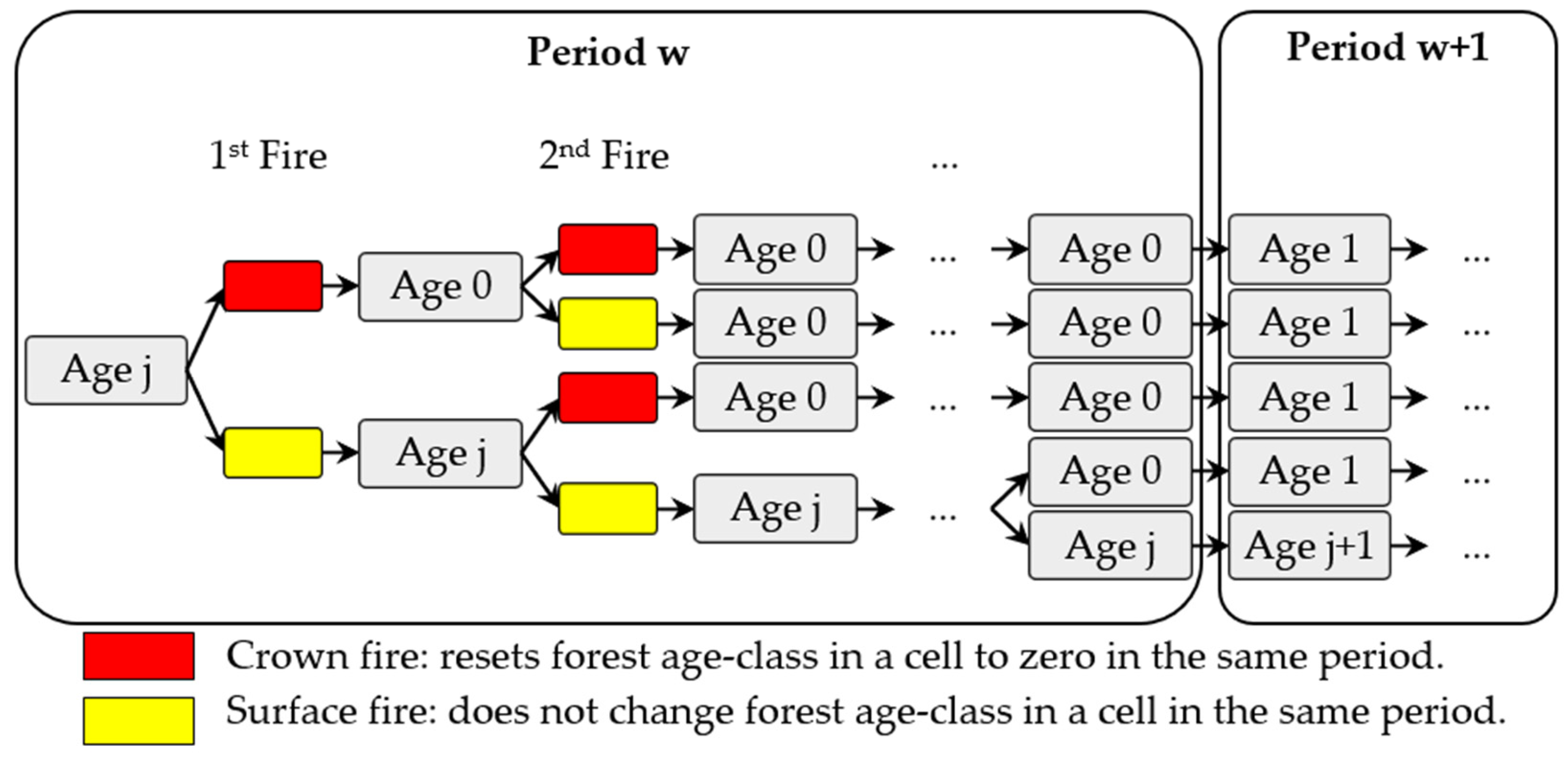
- : A binary variable receiving a value of one if cell in age-class is burned by fire . If either cell is not in age-class or fire does not burn this cell then .
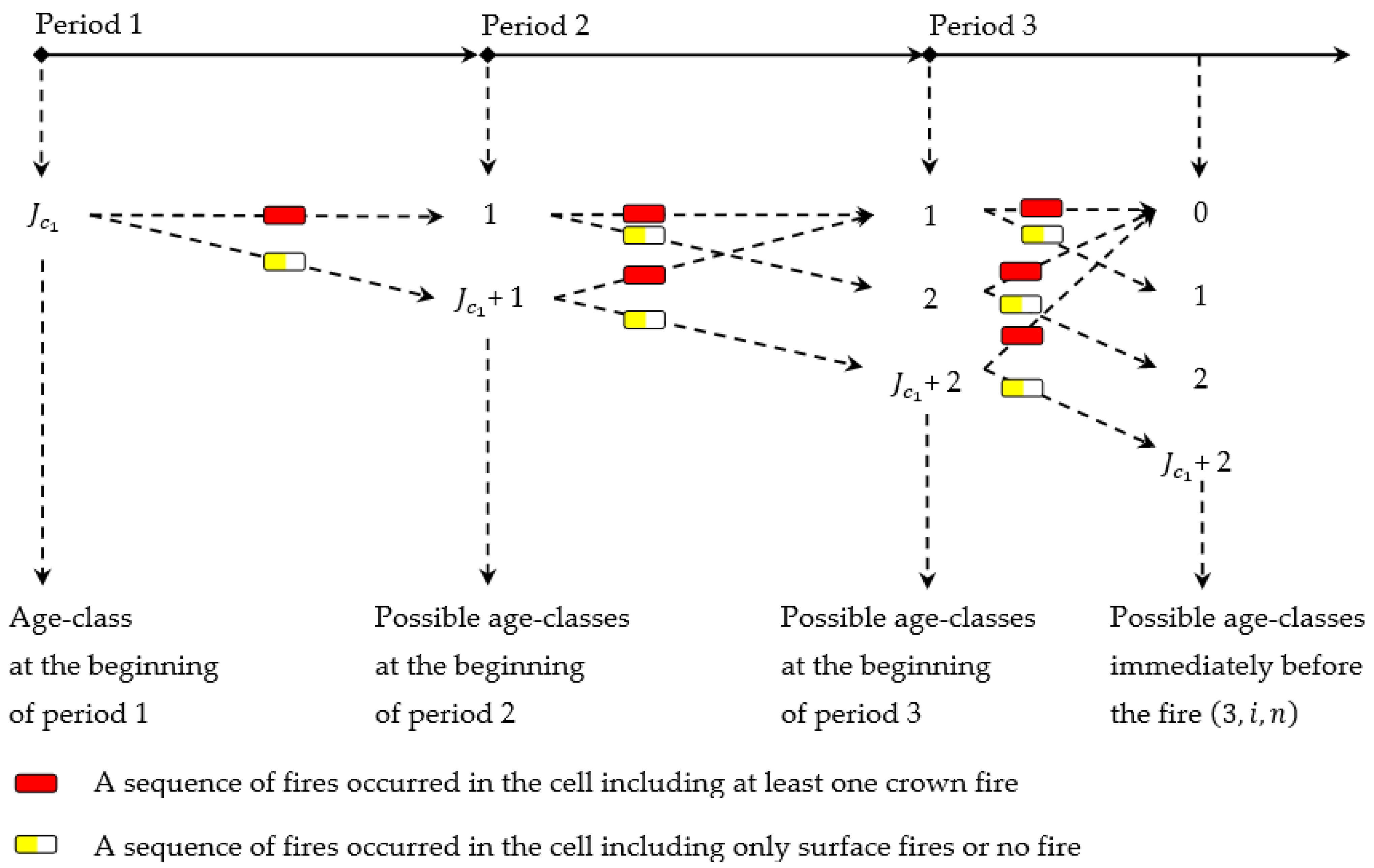
- For fire in the 1st period: Age-class of cell at the time immediately before the occurrence of fire can be either 0 or ()
- For fire in the 2nd period: Age-class of cell at the time immediately before the occurrence of fire can only be 0, 1, or ()
- For fire in the 3rd period: Age-class of cell at the time immediately before the occurrence of fire can only be 0, 1, 2, or (

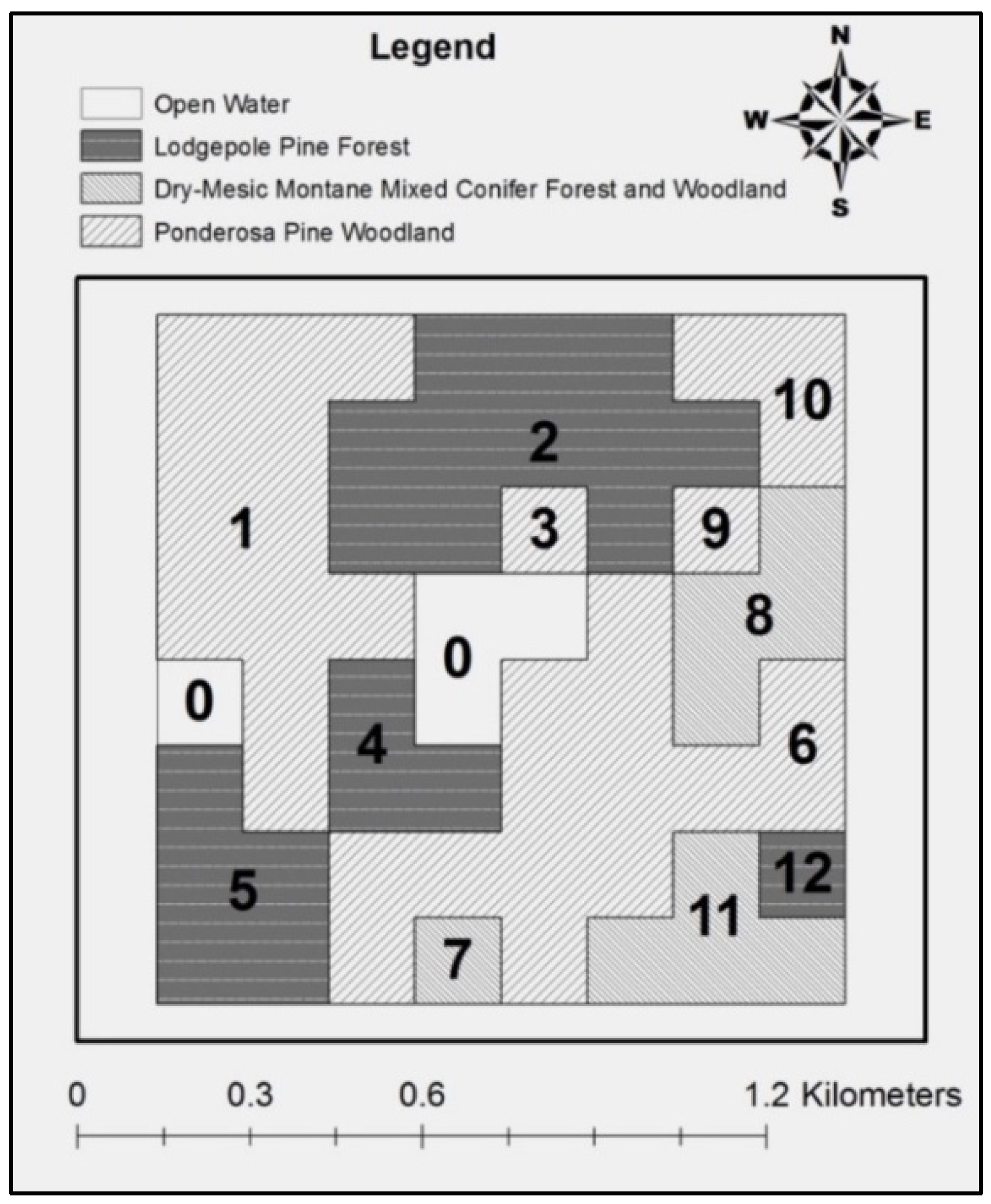
A.4. Information of the Synthesized Landscape
| Characteristic | Specification | |
|---|---|---|
| Elevation | 2455–2587 m | |
| Slope | 5–90% | |
| Aspect | 0, 45, 90, 135, 180, 225, 270, 315, 360 | |
| Fuel model (Fuel type) | Open Water (98) Mixed Conifer Forest and Woodland (122) Ponderosa Pine Woodland (165) Lodge pole Pine Forest (183) | |
| Canopy cover | 80–100% | |
| Foliar moisture content (FMC) | 100% | |
| Forest age-class; Canopy base height (CBH) | ||
| Wildfire ignition frequency | 0.0078125 per cell per decade | |
| Wind direction and speed | 16 combinations of wind direction and speed with cumulative percentage: | |
| N, 4.5, 2% NNE, 4 mph, 3.6% NNW, 5 mph, 6.7% NE, 4.9 mph, 11.4% ENE, 4.6 mph, 14.7% E, 5 mph, 19.4% ESE, 5.3 mph, 27% SE, 5.2 mph, 32% | SSE, 4.4 mph, 34.1% S, 4.7 mph, 35.8% SSW, 5.5 mph, 39% SW, 5.2 mph, 52.2% WSW, 6.6 mph, 65.3% W, 7.8 mph, 80.8% WNW, 8 mph, 93.4% NW, 6.1 mph, 100% | |
A.5. FLAMMAP Outputs for Calculations of Parameters Used in the Test Cases
References
- King, K.J.; Bradstock, R.A.; Cary, G.J.; Chapman, J.; Marsden-Smedley, J.B. The Relative Importance of Fine-Scale Fuel Mosaics on Reducing Fire Risk in South-West Tasmania, Australia. Int. J. Wildland Fire 2008, 17, 421–430. [Google Scholar] [CrossRef]
- Kozlowski, T.T. Fire and Ecosystems; Elsevier: Amsterdam, The Netherlands, 2012; ISBN 0-323-14617-1. [Google Scholar]
- László, F.; Rajmund, K. Characteristics of Forest Fires and Their Impact on the Environment. AARMS Acad. Appl. Res. Mil. Public Manag. Sci. 2016, 15, 5–17. [Google Scholar]
- Alkire, C. The Federal Wildland Fire Budget, Let’s Prepare, Not Just React: Emphasis on Reduced Financial and Ecological Costs; Wilderness Society: Washington, DC, USA, 2004. [Google Scholar]
- Conard, S.G.; Hartzell, T.; Hilbruner, M.W.; Zimmerman, G.T. Changing Fuel Management Strategies—The Challenge of Meeting New Information and Analysis Needs. Int. J. Wildland Fire 2001, 10, 267–275. [Google Scholar] [CrossRef]
- Agee, J.K.; Skinner, C.N. Basic Principles of Forest Fuel Reduction Treatments. For. Ecol. Manag. 2005, 211, 83–96. [Google Scholar] [CrossRef]
- Cohen, J. The wildland-urban interface fire problem: A consequence of the fire exclusion paradigm. For. Hist. Today 2010, Fall, 20–26. [Google Scholar]
- Pyne, S.J.; Andrews, P.L.; Laven, R.D. Introduction to Wildland Fire; John Wiley and Sons: Hoboken, NJ, USA, 1996. [Google Scholar]
- Finney, M.A. Design of Regular Landscape Fuel Treatment Patterns for Modifying Fire Growth and Behavior. For. Sci. 2001, 47, 219–228. [Google Scholar]
- Collins, B.M.; Stephens, S.L.; Moghaddas, J.J.; Battles, J. Challenges and Approaches in Planning Fuel Treatments across Fire-Excluded Forested Landscapes. J. For. 2010, 108, 24–31. [Google Scholar]
- Fulé, P.Z.; McHugh, C.; Heinlein, T.A.; Covington, W.W. Potential Fire Behavior Is Reduced Following Forest Res-Toration Treatments. In Proceedings of the Ponderosa Pine Ecosystems Restoration and Conservation: Steps Toward, Flagstaff, AZ, USA, 25–27 April 2000. [Google Scholar]
- Martinson, E.J.; Omi, P.N.; Omi, P.N.; Joyce, L.A. Performance of Fuel Treatments Subjected to Wildfires; Citeseer: Princeton, NJ, USA, 2002. [Google Scholar]
- Fiedler, C.E.; Keegan, C.E., III.; Woodall, C.W.; Morgan, T.A. A Strategic Assessment of Crown Fire Hazard in Montana: Potential Effectiveness and Costs of Hazard Reduction Treatments; PNW-GTR-622; U.S. Department of Agriculture, Forest Service, Pacific Northwest Research Station: Portland, OR, USA, 2004. [Google Scholar]
- Skinner, C.N. Reintroducing Fire into the Blacks Mountain Research Natural Area: Effects on Fire Hazard. In Proceedings of the Conference on Symposium on Ponderosa Pine: Issues, Trends, And Management, Klamath Falls, OR, USA, 18–21 October 2004; Citeseer: Princeton, NJ, USA, 2005; pp. 245–257. [Google Scholar]
- Ritchie, M.W.; Skinner, C.N.; Hamilton, T.A. Probability of Tree Survival after Wildfire in an Interior Pine Forest of Northern California: Effects of Thinning and Prescribed Fire. For. Ecol. Manag. 2007, 247, 200–208. [Google Scholar] [CrossRef]
- Strom, B.A.; Fulé, P.Z. Pre-Wildfire Fuel Treatments Affect Long-Term Ponderosa Pine Forest Dynamics. Int. J. Wildland Fire 2007, 16, 128–138. [Google Scholar] [CrossRef]
- Schmidt, D.A.; Taylor, A.H.; Skinner, C.N. The Influence of Fuels Treatment and Landscape Arrangement on Simulated Fire Behavior, Southern Cascade Range, California. For. Ecol. Manag. 2008, 255, 3170–3184. [Google Scholar] [CrossRef]
- Stephens, S.L.; Moghaddas, J.J.; Edminster, C.; Fiedler, C.E.; Haase, S.; Harrington, M.; Keeley, J.E.; Knapp, E.E.; McIver, J.D.; Metlen, K. Fire Treatment Effects on Vegetation Structure, Fuels, and Potential Fire Severity in Western US Forests. Eco-Log. Appl. 2009, 19, 305–320. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Laverty, L.; Williams, J. Protecting People and Sustaining Resources in Fire-Adapted Ecosystems: A Cohesive Strategy; Citeseer: Princeton, NJ, USA, 2000. [Google Scholar]
- Radeloff, V.C.; Hammer, R.B.; Stewart, S.I.; Fried, J.S.; Holcomb, S.S.; McKeefry, J.F. The Wildland-Urban Interface in the United States. Ecol. Appl. 2005, 15, 799–805. [Google Scholar] [CrossRef] [Green Version]
- Ager, A.A.; McMahan, A.J.; Barrett, J.J.; McHugh, C.W. A Simulation Study of Thinning and Fuel Treatments on a Wildland–Urban Interface in Eastern Oregon, USA. Landsc. Urban Plan. 2007, 80, 292–300. [Google Scholar] [CrossRef]
- Contreras, M.A.; Parsons, R.A.; Chung, W. Modeling Tree-Level Fuel Connectivity to Evaluate the Effectiveness of Thinning Treatments for Reducing Crown Fire Potential. For. Ecol. Manag. 2012, 264, 134–149. [Google Scholar] [CrossRef]
- Gonzalez, J.R.; Barrio, G.; Duguy, B. Assessing Functional Landscape Connectivity for Disturbance Propagation on Regional Scales—A Cost-Surface Model Approach Applied to Surface Fire Spread. Ecol. Model. 2008, 211, 121–141. [Google Scholar] [CrossRef]
- Reinhardt, E.D.; Keane, R.E.; Calkin, D.E.; Cohen, J.D. Objectives and Considerations for Wildland Fuel Treatment in Forested Ecosystems of the Interior Western United States. For. Ecol. Manag. 2008, 256, 1997–2006. [Google Scholar] [CrossRef]
- Mell, W.E.; Manzello, S.L.; Maranghides, A.; Butry, D.; Rehm, R.G. The Wildland–Urban Interface Fire Problem–Current Approaches and Research Needs. Int. J. Wildland Fire 2010, 19, 238–251. [Google Scholar] [CrossRef]
- Bevers, M.; Omi, P.N.; Hof, J. Random Location of Fuel Treatments in Wildland Community Interfaces: A Percolation Approach. Can. J. For. Res. 2004, 34, 164–173. [Google Scholar] [CrossRef] [Green Version]
- Hirsch, K.G.; Podur, J.J.; Janser, R.F.; McAlpine, R.S.; Martell, D.L. Productivity of Ontario Initial-Attack Fire Crews: Results of an Expert-Judgement Elicitation Study. Can. J. For. Res. 2004, 34, 705–715. [Google Scholar] [CrossRef]
- Loehle, C. Applying Landscape Principles to Fire Hazard Reduction. For. Ecol. Manag. 2004, 198, 261–267. [Google Scholar] [CrossRef] [Green Version]
- Agee, J.K.; Bahro, B.; Finney, M.A.; Omi, P.N.; Sapsis, D.B.; Skinner, C.N.; Wagtendonk, J.W.; Weatherspoon, C.P. The Use of Shaded Fuelbreaks in Landscape Fire Management. For. Ecol. Manag. 2000, 127, 55–66. [Google Scholar] [CrossRef]
- Finney, M.A.; Cohen, J.D. Expectation and Evaluation of Fuel Management Objectives. In The USDA Forest Service Proceedings RMRS-P-29; USDA Forest Service: Washington, DC, USA, 2003; pp. 353–366. [Google Scholar]
- Moghaddas, J.J.; Craggs, L. A Fuel Treatment Reduces Fire Severity and Increases Suppression Efficiency in a Mixed Conifer Forest. Int. J. Wildland Fire 2008, 16, 673–678. [Google Scholar] [CrossRef]
- Carey, H.; Schumann, M. Modifying Wildfire Behavior—The Effectiveness of Fuel Treatments; National Community Forestry Center: Quebec, QC, Canada, 2003. [Google Scholar]
- Graham, R.T.; McCaffrey, S.; Jain, T.B. Science Basis for Changing Forest Structure to Modify Wildfire Behavior and Severity; RMRS-GTR-120; U.S. Department of Agriculture, Forest Service, Rocky Mountain Research Station: Fort Collins, CO, USA, 2004. [Google Scholar]
- Ager, A.A.; Finney, M.A.; Kerns, B.K.; Maffei, H. Modeling Wildfire Risk to Northern Spotted Owl (Strix Occidentalis Caurina) Habitat in Central Oregon, USA. For. Ecol. Manag. 2007, 246, 45–56. [Google Scholar] [CrossRef]
- Finney, M.A.; Seli, R.C.; McHugh, C.W.; Ager, A.A.; Bahro, B.; Agee, J.K. Simulation of Long-Term Landscape-Level Fuel Treatment Effects on Large Wildfires. Int. J. Wildland Fire 2008, 16, 712–727. [Google Scholar] [CrossRef] [Green Version]
- González, J.; Palahí, M.; Pukkala, T. Integrating Fire Risk Considerations in Forest Management Planning in Spain—A Landscape Level Perspective. Landsc. Ecol. 2005, 20, 957–970. [Google Scholar] [CrossRef]
- Kim, Y.-H.; Bettinger, P. Effects of Arranging Forest Fuel Reduction Treatments in Spatial Patterns on Hypothetical, Simulated, Human-Caused Wildfires. J. Environ. Sci. Technol. 2008, 1, 187. [Google Scholar] [CrossRef] [Green Version]
- Salazar, L.A.; González-Cabán, A. Spatial Relationship of a Wildfire, Fuelbreaks, and Recently Burned Areas. West. J. Appl. For. 1987, 2, 55–58. [Google Scholar] [CrossRef]
- Dunn, A.T. The Effects of Prescribed Burning on Fire Hazard in the Chaparral: Toward a New Conceptual Synthesis. In Proceedings of the Symposium on Fire and Watershed Management, Sacramento, CA, USA, 26–28 October 1988; USDA Forest Service, Pacific Southwest Forest and Range Experiment Station: Washington, DC, USA, 1989; pp. 23–29. [Google Scholar]
- Finney, M.A.; McHugh, C.W.; Grenfell, I.C. Stand-and Landscape-Level Effects of Prescribed Burning on Two Arizona Wildfires. Can. J. For. Res. 2005, 35, 1714–1722. [Google Scholar] [CrossRef]
- Parisien, M.; Junor, D.R.; Kafka, V.G. Comparing Landscape-Based Decision Rules for Placement of Fuel Treatments in the Boreal Mixedwood of Western Canada. Int. J. Wildland Fire 2007, 16, 664–672. [Google Scholar] [CrossRef]
- Lynch, D.L.; Mackes, K.; Omi, P.N.; Joyce, L.A. Costs for Reducing Fuels in Colorado Forest Restoration Projects; USDA Forest Service Rocky Mountain Research Station: Fort Collins, CO, USA, 2002. [Google Scholar]
- Green, D.G. Shapes of Simulated Fires in Discrete Fuels. Ecol. Model. 1983, 20, 21–32. [Google Scholar] [CrossRef]
- Davis, F.W.; Burrows, D.A. Spatial Simulation of Fire Regime in Mediterranean-Climate Landscapes. In The Role of Fire in Mediterranean-Type Ecosystems; Springer: New York, NY, USA, 1994; pp. 117–139. [Google Scholar]
- Turner, M.G.; Romme, W.H. Landscape Dynamics in Crown Fire Ecosystems. Landsc. Ecol. 1994, 9, 59–77. [Google Scholar] [CrossRef]
- Finney, M.A. Calculation of Fire Spread Rates across Random Landscapes. Int. J. Wildland Fire 2003, 12, 167–174. [Google Scholar] [CrossRef]
- Kim, Y.-H.; Bettinger, P.; Finney, M. Spatial Optimization of the Pattern of Fuel Management Activities and Subsequent Effects on Simulated Wildfires. Eur. J. Oper. Res. 2009, 197, 253–265. [Google Scholar] [CrossRef]
- Palma, C.D.; Cui, W.; Martell, D.L.; Robak, D.; Weintraub, A. Assessing the Impact of Stand-Level Harvests on the Flammability of Forest Landscapes. Int. J. Wildland Fire 2007, 16, 584–592. [Google Scholar] [CrossRef]
- Price, O.F. The Drivers of Effectiveness of Prescribed Fire Treatment. For. Sci. 2012, 58, 606–617. [Google Scholar] [CrossRef]
- Fujioka, F.M. Estimating Wildland Fire Rate of Spread in a Spatially Nonuniform Environment. For. Sci. 1985, 31, 21–29. [Google Scholar]
- Finney, M.A. A Computational Method for Optimising Fuel Treatment Locations. Int. J. Wildland Fire 2007, 16, 702–711. [Google Scholar] [CrossRef] [Green Version]
- Zavala, M.A.; Marcos, F. Ecological Effects of Harvesting Biomass for Energy in the Spanish Mediterranean. Landsc. Urban Plan. 1993, 24, 227–231. [Google Scholar] [CrossRef]
- Collins, B.M.; Miller, J.D.; Thode, A.E.; Kelly, M.; Wagtendonk, J.W.; Stephens, S.L. Interactions among Wildland Fires in a Long-Established Sierra Nevada Natural Fire Area. Ecosystems 2009, 12, 114–128. [Google Scholar] [CrossRef]
- Madrigal, J.; Fernández-Migueláñez, I.; Hernando, C.; Guijarro, M.; Vega-Nieva, D.J.; Tolosana, E. Does Forest Biomass Harvesting for Energy Reduce Fire Hazard in the Mediterranean Basin? A Case Study in the Caroig Massif (Eastern Spain). Eur. J. For. Res. 2017, 136, 13–26. [Google Scholar] [CrossRef]
- Black, A. Wildland Fire Use: The “Other” Treatment Option. In Rocky Mountain Research Station; Research Note RMRS-RN-23-6; USDA Forest Service: Washington, DC, USA, 2004. [Google Scholar]
- Weatherspoon, C.P.; Skinner, C.N. Landscape-level strategies for forest fuel management. In Sierra Nevada Ecosystem Project: Final Report to Congress; Centers for Water and Wildland Resources, University of California: Los Angeles, CA, USA, 1996; pp. 1471–1492. [Google Scholar]
- Fernandes, P.M.; Botelho, H.S. A Review of Prescribed Burning Effectiveness in Fire Hazard Reduction. Int. J. Wildland Fire 2003, 12, 117–128. [Google Scholar] [CrossRef] [Green Version]
- Yemshanov, D.; Liu, N.; Thompson, D.K.; Parisien, M.A.; Barber, Q.E.; Koch, F.H.; Reimer, J. Detecting Critical Nodes in Forest Landscape Networks to Reduce Wildfire Spread. PLoS ONE 2021, 16, e0258060. [Google Scholar] [CrossRef] [PubMed]
- Hof, J.; Omi, P.N.; Bevers, M.; Laven, R.D. A timing-oriented approach to spatial allocation of fire management effort. For. Sci. 2000, 46, 442–451. [Google Scholar]
- Hof, J.; Omi, P. Scheduling removals for fuels management. USDA For. Serv. Proc. 2003, 29, 367–378. [Google Scholar]
- Konoshima, M.; Albers, H.J.; Montgomery, C.A.; Arthur, J.L. Optimal Spatial Patterns of Fuel Management and Timber Harvest with Fire Risk. Can. J. For. Res. 2010, 40, 95–108. [Google Scholar] [CrossRef]
- Wei, Y.; Rideout, D.; Kirsch, A. An Optimization Model for Locating Fuel Treatments across a Landscape to Reduce Expected Fire Losses. Can. J. For. Res. 2008, 38, 868–877. [Google Scholar] [CrossRef]
- Wei, Y. Optimize Landscape Fuel Treatment Locations to Create Control Opportunities for Future Fires. Can. J. For. Res. 2012, 42, 1002–1014. [Google Scholar] [CrossRef]
- Stauffer, D.; Aharony, A. Introduction to Percolation Theory; Taylor and Francis: London, UK, 1991. [Google Scholar]
- With, K. Using Percolation Theory to Assess Landscape Connectivity and Effects of Habitat Fragmentation. In Applying Landscape Ecology in Biological Conservation; Springer: New York, NY, USA, 2002. [Google Scholar]
- Matsypura, D.; Prokopyev, O.A.; Zahar, A. Wildfire Fuel Management: Network-Based Models and Optimization of Prescribed Burning. Eur. J. Oper. Res. 2018, 264, 774–796. [Google Scholar] [CrossRef]
- Minas, J.P.; Hearne, J.W.; Martell, D.L. A Spatial Optimisation Model for Multi-Period Landscape Level Fuel Man-Agement to Mitigate Wildfire Impacts. Eur. J. Oper. Res. 2014, 232, 412–422. [Google Scholar] [CrossRef]
- Wei, Y.; Long, Y. Schedule Fuel Treatments to Fragment High Fire Hazard Fuel Patches. Math. Computa-Tional For. Nat.-Resour. Sci. MCFNS 2014, 6, 1. [Google Scholar]
- Martell, D.L. Forest Fire Management. In Handbook of Operations Research in Natural Resources; Springer: New York, NY, USA, 2007; pp. 489–509. [Google Scholar]
- Finney, M.A. FARSITE: A Fire Area Simulator for Fire Managers; Forest Service, U.S. Department of Agriculture: Washington, DC, USA, 1995; Volume 158. [Google Scholar]
- Finney, M.A. Mechanistic Modeling of Landscape Fire Patterns. In Spatial Modeling of Forest Landscapes: Approaches and Applications; Cambridge University Press: Cambridge, UK, 1999; pp. 186–209. [Google Scholar]
- Scott, J.; Burgan, R. Standard Fire Behavior Fuel Models: A Comprehensive Set for Use with Rothermel’s Surface Fire Spread Model; USDA Forest Service: Washington, DC, USA, 2005. [Google Scholar]
- Ager, A.A.; Houtman, R.M.; Seli, R.; Day, M.A.; Bailey, J. Integrating Large Wildfire Simulation and Forest Growth Modeling for Restoration Planning; US Department of Agriculture Forest Service, Southern Research Station: Asheville, NC, USA, 2017; Volume 224, pp. 129–137. [Google Scholar]
- Borges, J.G.; Hoganson, H.M.; Falcão, A.O. Heuristics in multi-objective forest management. Multi-Objective Forest Planning; Springer: Dordrecht, The Netherlands, 2002; pp. 119–151. [Google Scholar]
- Thompson, W.A.; Vertinsky, I.; Schreier, H.; Blackwell, B.A. Using forest fire hazard modelling in multiple use forest management planning. For. Ecol. Manag. 2000, 134, 163–176. [Google Scholar] [CrossRef]
- Calkin, D.E.; Hummel, S.S.; Agee, J.K. Modeling Trade-Offs between Fire Threat Reduction and Late-Seral Forest Structure. Can. J. For. Res. 2005, 35, 2562–2574. [Google Scholar] [CrossRef]
- Gosavi, A. Simulation-Based Optimization: Parametric Optimization Techniques and Reinforcement Learning; Springer: Boston, MA, USA, 2003. [Google Scholar]
- Finney, M.A. Landscape Fire Simulation and Fuel Treatment Optimization. In Methods for Integrated Modeling of Landscape; U.S. Department of Agriculture, Forest Service: Washington, DC, USA, 2004. [Google Scholar]
- Crookston, N.L.; Stage, A.R. User’s Guide to the Parallel Processing Extension of the Prognosis Model; US Department of Agriculture, Intermountain Research Station, Forest Service: Washington, DC, USA, 1991. [Google Scholar]
- Reinhardt, E.D.; Crookston, N.L. The Fire and Fuels Extension to the Forest Vegetation Simulator; US Department of Agriculture, Forest Service, Rocky Mountain Research Station: Fort Collins, CO, USA, 2003. [Google Scholar]
- Finney, M.A. Fire Growth Using Minimum Travel Time Methods. Can. J. For. Res. 2002, 32, 1420–1424. [Google Scholar] [CrossRef]
- Rytwinski, A.; Crowe, K.A. A Simulation-Optimization Model for Selecting the Location of Fuel-Breaks to Minimize Expected Losses from Forest Fires. For. Ecol. Manag. 2010, 260, 1. [Google Scholar] [CrossRef]
- Glover, F. A Template for Scatter Search and Path Relinking. In Artificial Evolution; Springer: Berlin/Heidelberg, Germany, 1998; pp. 1–51. [Google Scholar]
- Minas, J.; Hearne, J.; Martell, D. An Integrated Optimization Model for Fuel Management and Fire Suppression Pre-Paredness Planning. Ann. Oper. Res. 2013, 232, 201–215. [Google Scholar]
- Schaaf, M.D.; Wiitala, M.A.; Schreuder, M.D.; Weise, D.R. An Evaluation of the Economic Tradeoffs of Fuel Treatment and Fire Suppression on the Angeles National Forest Using the Fire Effects Tradeoff Model FETM. In Proceedings of the II International Symposium on Fire Economics, Policy and Planning: A Global Vision; Pacific Southwest Research Station, Forest Service, U.S. Department of Agriculture: Albany, CA, USA, 2004; pp. 19–22. [Google Scholar]
- Mercer, D.E.; Haight, R.G.; Prestemon, J.P. Analyzing Trade-Offs between Fuels Management, Suppression, and Damages from Wildfire. The Economics of Forest Disturbances; Springer: Dordrecht, The Netherlands, 2008; pp. 247–272. [Google Scholar]
- Thompson, M.P.; Riley, K.L.; Loeffler, D.; Haas, J.R. Modeling Fuel Treatment Leverage: Encounter Rates, Risk Reduction, and Suppression Cost Impacts. Forests 2017, 8, 469. [Google Scholar] [CrossRef] [Green Version]
- Bettinger, P. An Overview of Methods for Incorporating Wildfires into Forest Planning Models. Math. Comput. For. Nat. Resour. Sci. 2010, 2, 43–52. [Google Scholar]
- Konoshima, M.; Montgomery, C.A.; Albers, H.J.; Arthur, J.L. Spatial-endogenous fire risk and efficient fuel man-agement and timber harvest. Land Econ. 2008, 84, 449–468. [Google Scholar] [CrossRef]
- Kleywegt, A.J.; Shapiro, A.; Homem-de-Mello, T. The Sample Average Approximation Method for Stochastic Discrete Optimization. SIAM J. Optim. 2002, 12, 479–502. [Google Scholar] [CrossRef] [Green Version]
- Birge, J.R.; Louveaux, F. Introduction to Stochastic Programming; Springer Science & Business Media: New York, NY, USA, 2011. [Google Scholar]
- Shapiro, A.; Homem-de-Mello, T. On the Rate of Convergence of Optimal Solutions of Monte Carlo Approximations of Stochastic Programs. SIAM J. Optim. 2000, 11, 70–86. [Google Scholar] [CrossRef]
- Lima, R.M.; Conejo, A.J.; Giraldi, L.; Le Maitre, O.; Hoteit, I.; Knio, O.M. Sample Average Approximation for Risk-Averse Problems: A Virtual Power Plant Scheduling Application. EURO J. Comput. Optim. 2021, 9, 100005. [Google Scholar] [CrossRef]
- Sullivan, A.L. Wildland Surface Fire Spread Modelling, 1990–2007, 3: Simulation and Mathematical Analogue Models. Int. J. Wildland Fire 2009, 18, 387–403. [Google Scholar] [CrossRef] [Green Version]
- Alexandridis, A.; Russo, L.; Vakalis, D.; Bafas, G.; Siettos, C. Wildland Fire Spread Modelling Using Cellular Automata: Evolution in Large-Scale Spatially Heterogeneous Environments under Fire Suppression Tactics. Int. J. Wildland Fire 2011, 20, 633–647. [Google Scholar] [CrossRef]
- Albinet, G.; Searby, G.; Stauffer, D. Fire Propagation in a 2-D Random Medium. J. Phys. 1986, 47, 1. [Google Scholar] [CrossRef] [Green Version]
- Von Niessen, W.; Blumen, A. Dynamic Simulation of Forest Fires. Can. J. For. Res. Print 1988, 18, 805–812. [Google Scholar] [CrossRef]
- Gonçalves, P.; Diogo, P. Geographic Information Systems and Cellular Automata: A New Approach to Forest Fire Simulation. In Proceedings of the European Conference on Geographical Information Systems (EGIS 94), Paris, France, 29 March–1 April 1994; pp. 702–712. [Google Scholar]
- Karafyllidis, I.; Thanailakis, A. A Model for Predicting Forest Fire Spreading Using Cellular Automata. Ecol. Model. 1997, 99, 87–97. [Google Scholar] [CrossRef]
- Trunfio, G.A. Predicting Wildfire Spreading through a Hexagonal Cellular Automata Model; Springer: Berlin/Heidelberg, Germany, 2004; pp. 385–394. [Google Scholar]
- Yongzhong, Z.; Feng, Z.-D.; Tao, H.; Liyu, W.; Kegong, L.; Xin, D. Simulating Wildfire Spreading Processes in a Spatially Heterogeneous Landscapes Using an Improved Cellular Automaton Model. In Proceedings of the IGARSS 2004 IEEE International Geoscience and Remote Sensing Symposium, Anchorage, AK, USA, 20–24 September 2004; Volume 5, pp. 3371–3374. [Google Scholar]
- Encinas, A.H.; Encinas, L.H.; White, S.H.; del Rey, A.M.; Sánchez, G.R. Simulation of Forest Fire Fronts Using Cellular Automata. Adv. Eng. Softw. 2007, 38, 372–378. [Google Scholar] [CrossRef]
- Collin, A.; Bernardin, D.; Sero-Guillaume, O. A Physical-Based Cellular Automaton Model for Forest-Fire Propagation. Combust. Sci. Technol. 2011, 183, 347–369. [Google Scholar] [CrossRef]
- Sun, T.; Zhang, L.; Chen, W.; Tang, X.; Qin, Q. Mountains Forest Fire Spread Simulator Based on Geo-Cellular Automaton Combined with Wang Zhengfei Velocity Model. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 6, 1971–1987. [Google Scholar] [CrossRef]
- Rienow, A.; Goetzke, R. Supporting SLEUTH–Enhancing a Cellular Automaton with Support Vector Machines for Urban Growth Modeling. Comput. Environ. Urban Syst. 2015, 49, 66–81. [Google Scholar] [CrossRef]
- Fernades, P. Prescribed Fire to Reduce Wildfire Hazard: An Analysis of Management Burns in Portuguese Pine Stands; Universitat de Girona: Girona, Spain, 1999. [Google Scholar]
- Rideout, D.B.; Reich, R.; Ziesler, P.S. Using Benefit Transfer to Estimate Average Relative Marginal Values for Wildland Fire Program Planning. J. Sustain. For. 2014, 33, 387–406. [Google Scholar] [CrossRef]
- Buckley, M.; Beck, N.; Bowden, P.; Miller, M.E.; Hill, B.; Luce, C.; Elliot, W.J.; Enstice, N.; Podolak, K.; Winford, E.; et al. Mokelumne Watershed Avoided Cost Analysis: Why Sierra Fuel Treat-Ments Make Economic Sense. In A Report Prepared for the Sierra Nevada Conservancy; The Nature Conservancy, and USDA Forest Service, Sierra Nevada Conservancy: Auburn, CA, USA, 2014; Verified 22 June 2015. Available online: http://www.sierranevadaconservancy.ca.gov/mokelumne (accessed on 7 March 2022).
- Hartsough, B.R.; Abrams, S.; Barbour, R.J.; Drews, E.S.; McIver, J.D.; Moghaddas, J.J.; Schwilk, D.W.; Stephens, S.L. The Economics of Alternative Fuel Reduction Treatments in Western United States Dry Forests: Financial and Policy Implications from the National Fire and Fire Surrogate Study. For. Policy Econ. 2008, 10, 344–354. [Google Scholar] [CrossRef]
- Cleaves, D.A.; Haines, T.K.; Martinez, J. Prescribed Burning Costs: Trends and Influences in the National Forest System. In Proceedings of the Symposium on Fire Economics Planning, and Policy: Bottom Lines, San Diego, CA, USA, 5–9 April 1999; pp. 277–288. [Google Scholar]
- Dale, L. The True Cost of Wildfire in the Western; US Western Forestry Leadership Coalition: Lakewood, CO, USA, 2009. [Google Scholar]
- Fitch, A.; Kim, Y.-S.; Waltz, A.E.M. Forest Restoration Treatments: Their Effect on Wildland Fire Suppression Costs; Ecological Restoration Institute, Northern Arizona University: Flagstaff, AZ, USA, 2013; Volume 12. [Google Scholar]
- Gebert, K.M.; Calkin, D.E.; Yoder, J. Estimating Suppression Expenditures for Individual Large Wildland Fires. West. J. Appl. For. 2007, 3, 188–196. [Google Scholar] [CrossRef] [Green Version]
- Smith, W.B.; Miles, P.D.; Perry, C.H.; Pugh, S.A. Forest Resources of the United States, 2007: A Technical Document Supporting the Forest Service 2010 RPA Assessment; General Technical Report; USDA Forest Service: Washington, DC, USA, 2009. [Google Scholar]
- Costanza, R.; d’Arge, R.; Groot, R.; Farber, S.; Grasso, M.; Hannon, B.; Limburg, K.; Naeem, S.; O’Neill, R.V.; Paruelo, J. The Value of the World’s Ecosystem Services and Natural Capital. Nature 1998, 387, 253–260. [Google Scholar] [CrossRef]
- Krieger, D.J. The Economic Value of Forest Ecosystem Services: A Review; Wilderness Society: Washington, DC, USA, 2001. [Google Scholar]
- Loomis, J.B.; Adamowicz, W.; Boxall, P.; Luckert, M.; Phillips, W.; White, W. Measuring General Public Preservation Values for Forest Resources: Evidence from Contingent Valuation Surveys. In Forestry, Economics and the Envi-Ronment; CAB International: Wallingford, UK, 1996; pp. 91–102. [Google Scholar]
- Ben-Tal, A.; Nemirovski, A. Robust Solutions of Uncertain Linear Programs. Oper. Res. Lett. 1999, 25, 1. [Google Scholar] [CrossRef] [Green Version]
- Belval, E.J.; Wei, Y.; Bevers, M. A Stochastic Mixed Integer Program to Model Spatial Wildfire Behavior and Suppression Placement Decisions with Uncertain Weather. Can. J. For. Res. 2016, 2, 234–248. [Google Scholar] [CrossRef]
- Wei, Y.; Rideout, D.B.; Hall, T.B. Toward Efficient Management of Large Fires: A Mixed Integer Programming Model and Two Iterative Approaches. For. Sci. 2011, 57, 435–447. [Google Scholar]
- Wagner, C.V. Conditions for the Start and Spread of Crown Fire. Can. J. For. Res. 1977, 7, 23–34. [Google Scholar] [CrossRef]









| Cost or Value | Source | |
|---|---|---|
| Slash reduction burning Prescribed natural fire Management-ignited prescribed fire Brush, range, and grassland prescribed fires | $261/acre $162/acre $121/acre $90/acre | [108] |
| Prescribed fire treatment | $125–490/acre | [109] |
| Slash reduction burning Prescribed natural fire Management-ignited prescribed fire | $167/acre $104/acre $78/acre | [110] |
| Suppression for large fires | $101–781/acre-burned | [108,111] |
| Suppression for similar-sized fires and conditions in untreated areas Suppression for similar-sized fires and conditions in treated areas | $706–825/acre-burned $287–327/acre-burned | [112] |
| Suppression for large fires | $106–1088/acre | [113] |
| Forest timber value | $3700–4300/acre | Saw-timber net volume [114], Saw-timber price (http://www.risiinfo.com, accessed on 30 August 2014) |
| Forest ecosystem value | $392/acre | [115,116] |
| Wilderness preservation value | $1246/acre | [117] |
| Sample Size (N) | 1 | 5 | 10 | 20 | 30 | 40 | 50 |
|---|---|---|---|---|---|---|---|
| Solution time (minutes) for low FPV models | 5 | 38 | 158 | 423 | 1491 | * | * |
| Solution time (minutes) for high FPV models | 5 | 17 | 46 | 179 | 413 | 827 | 1344 |
| No | Treated Stands | Chance (%) | Treatment Amount (%) | 95% Confidence Interval | ||
|---|---|---|---|---|---|---|
| Lower Bound | Mean | Upper Bound | ||||
| Low FPV | ||||||
| 1 | 3, 4, 8, 9 | 14.0 | 15.0 | 30.2 | 33.0 | 35.9 |
| 2 | 3, 4, 7, 8 | 0.7 | 15.0 | 30.5 | 33.3 | 36.2 |
| 3 | 4, 7, 8, 9 | 1.7 | 15.0 | 30.3 | 33.2 | 36.1 |
| 4 | 3, 4, 8, 12 | 1.0 | 15.0 | 31.0 | 33.9 | 36.9 |
| 5 | 3, 4, 7, 8, 9 | 0.3 | 16.7 | 30.5 | 33.3 | 36.0 |
| 6 | 3, 4, 8, 10 | 0.7 | 18.3 | 30.7 | 33.5 | 36.4 |
| 7 | 3, 4, 7, 8, 9, 12 | 3.3 | 18.3 | 30.3 | 33.0 | 35.7 |
| 8 | 4, 8, 9, 10 | 2.0 | 18.3 | 30.7 | 33.7 | 36.6 |
| 9 | 3, 4, 8, 9, 10 | 1.0 | 20.0 | 30.9 | 33.7 | 36.4 |
| 10 | 4, 8, 9, 11 | 0.3 | 20.0 | 31.3 | 34.1 | 36.9 |
| 11 | 3, 4, 8, 9, 11 | 0.7 | 21.7 | 31.5 | 34.1 | 36.8 |
| 12 | 1, 3 | 3.0 | 21.7 | 31.0 | 34.2 | 37.3 |
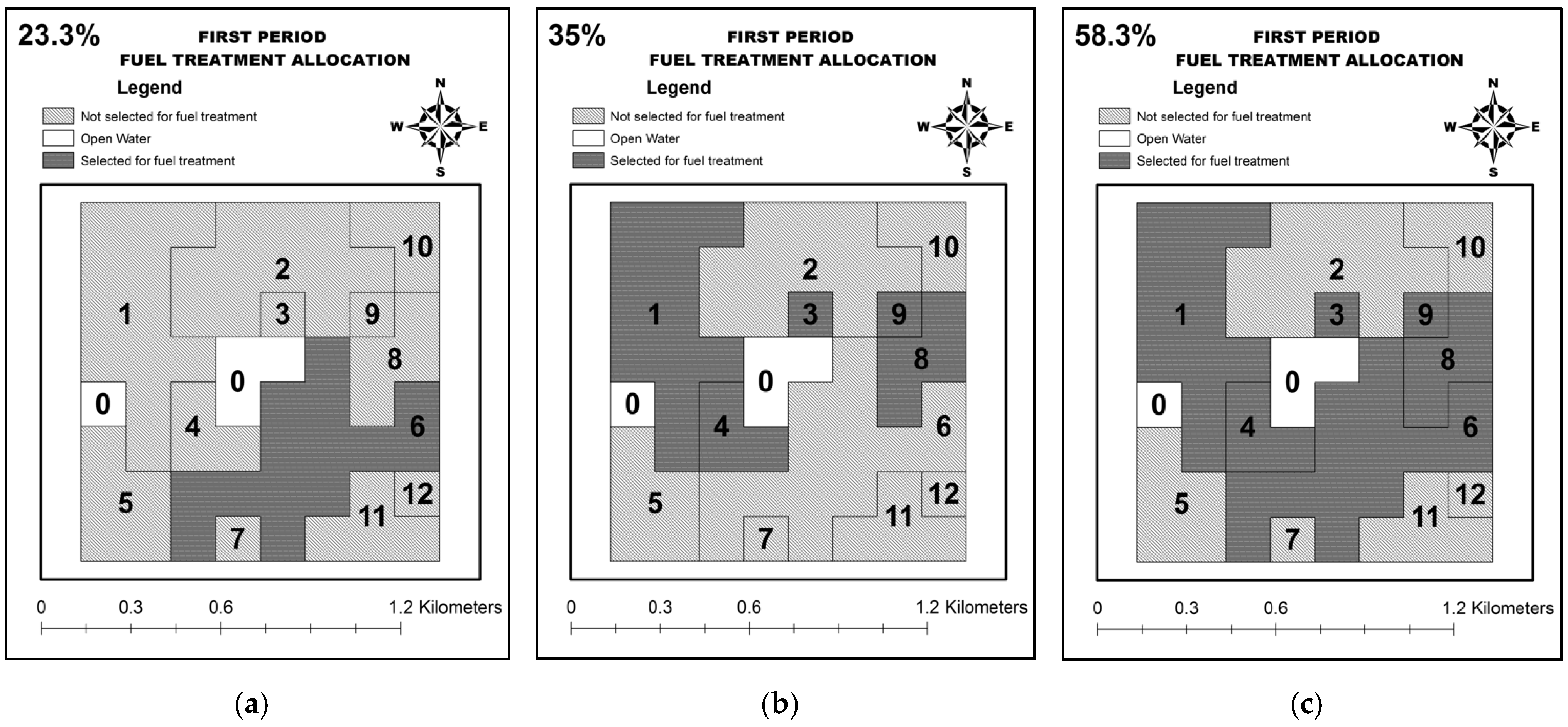
| 13 | 6 (Best FT1) | 16.7 | 23.3 | 30.1 | 32.6 | 35.1 |
| 14 | 1, 3, 9 | 3.7 | 23.3 | 30.9 | 33.9 | 36.9 |
| 15 | 1, 3, 7 | 1.0 | 23.3 | 31.1 | 34.2 | 37.2 |
| 16 | 6, 9 | 2.7 | 25.0 | 30.6 | 33.0 | 35.4 |
| 17 | 3, 6 | 3.3 | 25.0 | 30.7 | 33.1 | 35.5 |
| 18 | 3, 6, 9 | 1.0 | 26.7 | 31.2 | 33.5 | 35.9 |
| High FPV | ||||||
| 1 | 6 | 3.0 | 23.3 | 41.3 | 46.3 | 51.4 |
| 2 | 6, 9 | 3.3 | 25.0 | 41.3 | 46.1 | 51.0 |
| 3 | 3, 6 | 3.0 | 25.0 | 41.4 | 46.2 | 51.0 |
| 4 | 3, 6, 9 | 4.0 | 26.7 | 41.5 | 46.2 | 50.8 |
| 5 | 6, 8 | 1.0 | 30.0 | 41.7 | 46.2 | 50.7 |
| 6 | 6, 8, 9 | 3.0 | 31.7 | 41.8 | 46.2 | 50.6 |
| 7 | 1, 3, 4, 8, 9 | 3.7 | 35.0 | 42.1 | 46.3 | 50.5 |
| 8 | 1, 3, 4, 7, 8, 9 | 0.3 | 36.7 | 42.1 | 46.0 | 49.9 |
| 9 | 1, 6 | 7.7 | 43.3 | 41.2 | 44.3 | 47.4 |
| 10 | 1, 6, 9 (Best FT1) | 4.7 | 45.0 | 41.4 | 44.2 | 47.0 |
| 11 | 1, 3, 6 | 5.3 | 45.0 | 41.5 | 44.3 | 47.0 |
| 12 | 1, 3, 6, 9 | 3.3 | 46.7 | 41.7 | 44.2 | 46.7 |
| 13 | 1, 6, 10 | 0.3 | 48.3 | 42.4 | 45.1 | 47.7 |
| 14 | 1, 4, 6 | 0.7 | 48.3 | 43.0 | 46.0 | 49.0 |
| 15 | 1, 6, 8 | 1.7 | 50.0 | 42.0 | 44.3 | 46.6 |
| 16 | 1, 3, 6, 10 | 0.3 | 50.0 | 42.7 | 45.0 | 47.3 |
| 17 | 1, 6, 9, 10 | 0.3 | 50.0 | 42.7 | 45.1 | 47.5 |
| 18 | 1, 6, 8, 9 | 4.3 | 51.7 | 42.2 | 44.3 | 46.3 |
| 19 | 1, 3, 6, 8 | 1.7 | 51.7 | 42.5 | 44.5 | 46.5 |
| 20 | 1, 3, 6, 8, 9 | 2.0 | 53.3 | 42.8 | 44.6 | 46.4 |
| 21 | 1, 6, 8, 9, 10 | 0.3 | 56.7 | 44.0 | 45.8 | 47.6 |
| 22 | 1, 3, 4, 6, 8, 9 | 0.3 | 58.3 | 44.6 | 46.3 | 47.9 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, D.; Wei, Y. A Multistage Stochastic Program to Optimize Prescribed Burning Locations Using Random Fire Samples. Forests 2022, 13, 930. https://doi.org/10.3390/f13060930
Nguyen D, Wei Y. A Multistage Stochastic Program to Optimize Prescribed Burning Locations Using Random Fire Samples. Forests. 2022; 13(6):930. https://doi.org/10.3390/f13060930
Chicago/Turabian StyleNguyen, Dung, and Yu Wei. 2022. "A Multistage Stochastic Program to Optimize Prescribed Burning Locations Using Random Fire Samples" Forests 13, no. 6: 930. https://doi.org/10.3390/f13060930
APA StyleNguyen, D., & Wei, Y. (2022). A Multistage Stochastic Program to Optimize Prescribed Burning Locations Using Random Fire Samples. Forests, 13(6), 930. https://doi.org/10.3390/f13060930