1. Introduction
Property owners and government agencies have a legal duty of care for their trees and thus have to manage risks related to these trees. A central part of tree risk management is tree risk assessment. The risk of the vast majority of trees can be assessed visually during a basic assessment, but when the likelihood of failure remains uncertain after a visual inspection, a number of tools can be used for an advanced assessment to measure the extent of decay, loss of strength, or anchorage. Tomographs are such tools that have been widely used in tree risk assessment and research in urban forestry in recent years (e.g., [
1,
2,
3,
4,
5]). They are used to map internal decay non-destructively. Sonic tomographs (SoT) measure the time-of-flight of signals (
t) to produce a map of apparent absolute or relative stress wave velocity (
v), which will reveal areas of sound wood, if they can be traversed by stress waves on a straight path from one sensor to another. Electrical resistivity tomography (ERT) is a method to determine the spatial distribution of electric resistivity (
) non-destructively. In trees, results mainly correlate with ion and moisture content of the wood (e.g., [
2,
3,
4]) and, to a lesser degree, wood temperature. In urban tree risk assessment ERT is used to aid the interpretation of results from SoT [
6].
In tree risk assessment, tomograms are usually assessed with thresholds of residual wall thickness [
7,
8] or used in quantitative mechanical evaluations of the tomogram in terms of the section modulus (
Z) or its resistance to bending [
9]. Because the contribution of any part of the cross-section to the second moment of area increases with the square of its distance to the neutral axis of the stem (s. Equation (
2)), even apparently small variations in the input to these calculations may result in large variation in their result [
10,
11].
A source of such variations within tomograms common to both methods is the distance between measurement points. Stress wave velocity is calculated from the time-of-flight (measured by the sensors), and the distance between those sensors (measured by the operator), while in electrical resistivity tomography, apparent resistivity is estimated from resistance between electrode pairs and electrode positions. A further source of variation between tomograms are the changes in sensor position that are unavoidable when measurements are repeated after several years, possibly by different operators.
Seasonal and diurnal changes in wood moisture and temperature could add further variation to tomograms. However, effects of wood moisture on
v and resulting SoT of living trees are generally low [
12,
13,
14,
15] and the impact of declining temperature on stress wave velocity and tomograms is negligible as long as wood is not frozen [
16].
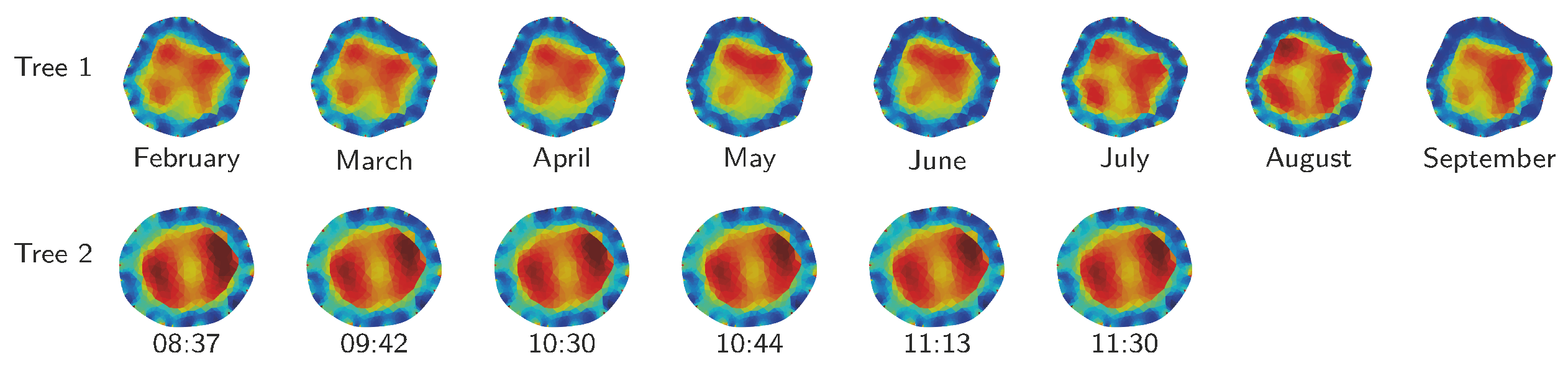
Stem electrical resistivity, on the other hand, changes significantly with temperature [
17,
18] and seasonally changing resistivity has been described for
Fagus sylvatica by [
19], who found different pattern of change in sap wood and heart wood. Similarly, wood moisture content has a significant effect on
and resulting tomograms [
17,
18].
When technical devices support decision making in tree risk management, the degree of uncertainty of their results should be known. Moreover must results of measurements in tree risk assessment be reproducible, especially for controversial trees, which might be assessed by different consultants for opposing clients. Even when trees are deemed safe by a consultant, the report will often advise making follow-up measurements after a period of some years. In these cases, it will be important that consultants can distinguish between effects of measurement uncertainty and a progression of decay.
So far, the different factors relevant to producing comparable tomograms have rarely been studied quantitatively and research concentrated on the effects of changes in wood temperature and moisture. No previous study has investigated the level of variation inherent in measurements of the loss of load bearing capacity (ZLoss) repeated over the course of years. Here, the complete process from the acquisition of raw data (sensor positions, stress wave travel times, electrical resistivities) to the mechanical evaluation of tomograms in terms of loss in section modulus, is analyzed for the first time. This investigation will help risk assessors and tree pathologists alike to evaluate differences between tomograms made by different operators at different times.
4. Discussion
When tree assessors or scientists repeat a tomographic measurement on a tree, they need to be able to differentiate between variation caused by the process of measuring and processing the data, and changes that can be attributed to spreading decay or experimental treatments. To date, the few longitudinal studies reporting repeated tomography on trees have interpreted differences between tomograms mainly as treatment effects ([
32,
33,
34], but see [
11,
17,
35]).
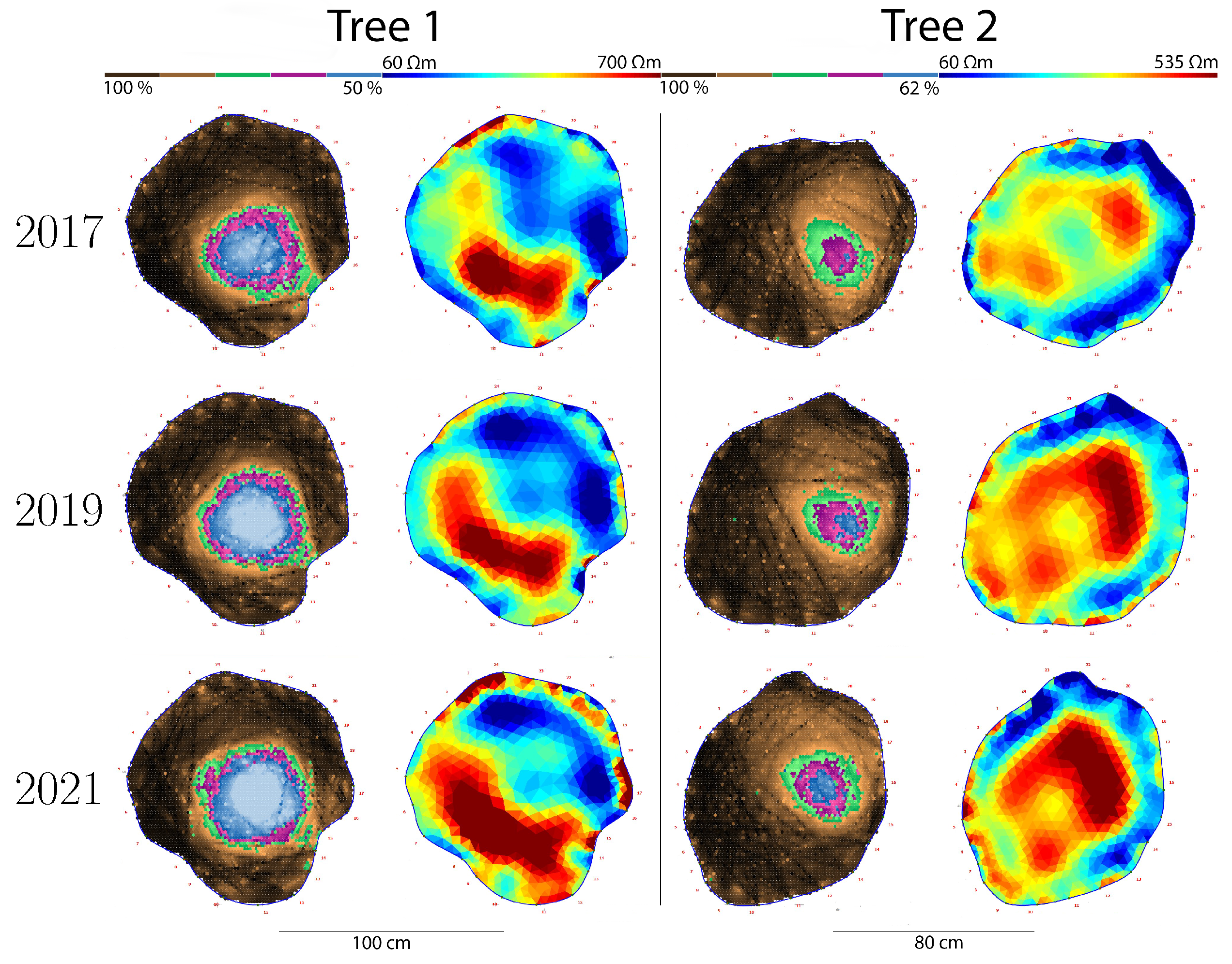
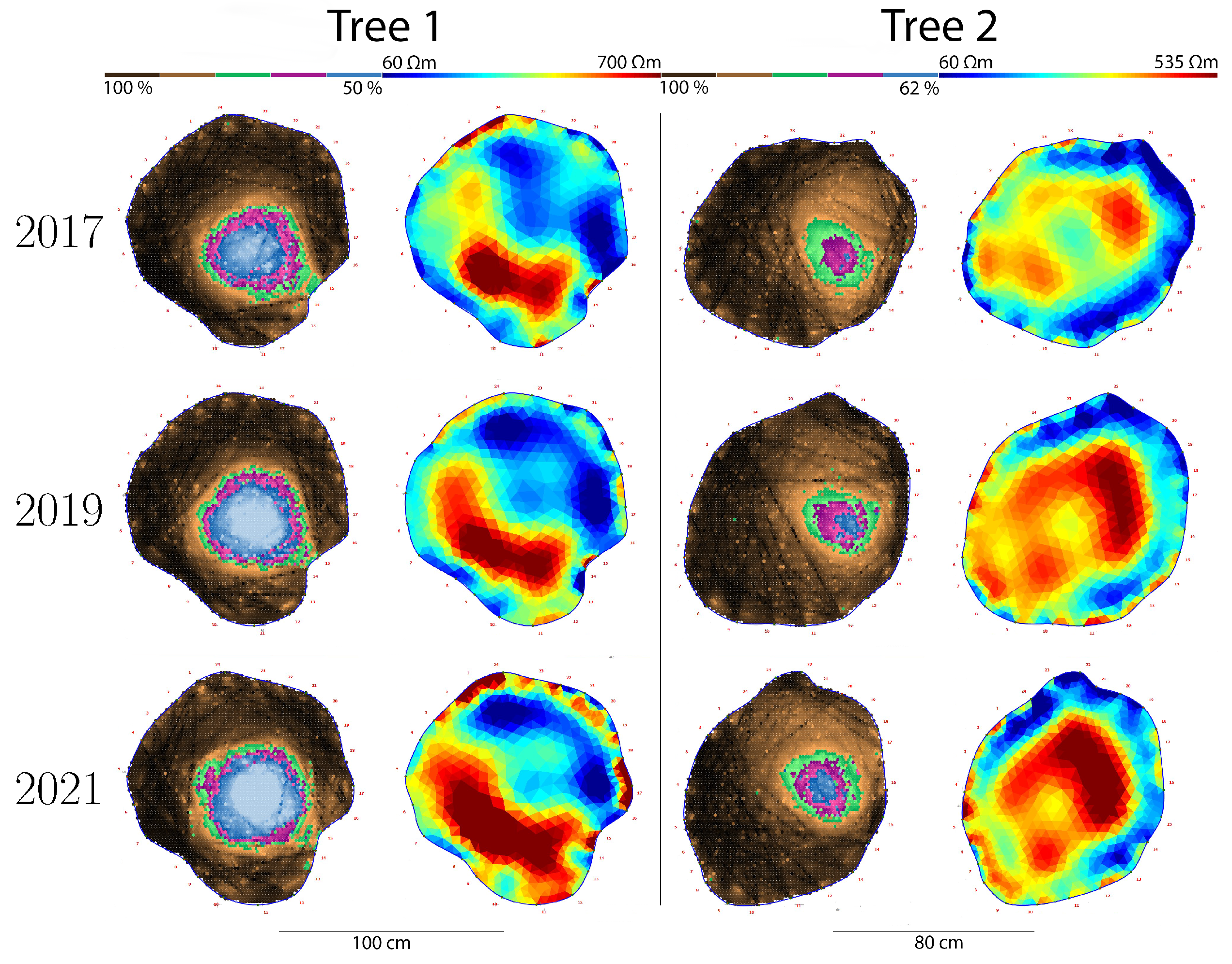
This study analyzed tomograms repeated within minutes or after several years, by the same or different operators, using either the same or a different experimental setup varying the sensor positions or the tomograph.
Stress wave tomograms were comparable even when measured by different operators some years apart. Thus, they typically allow monitoring the progress of decay, especially when SoT and ERT are combined [
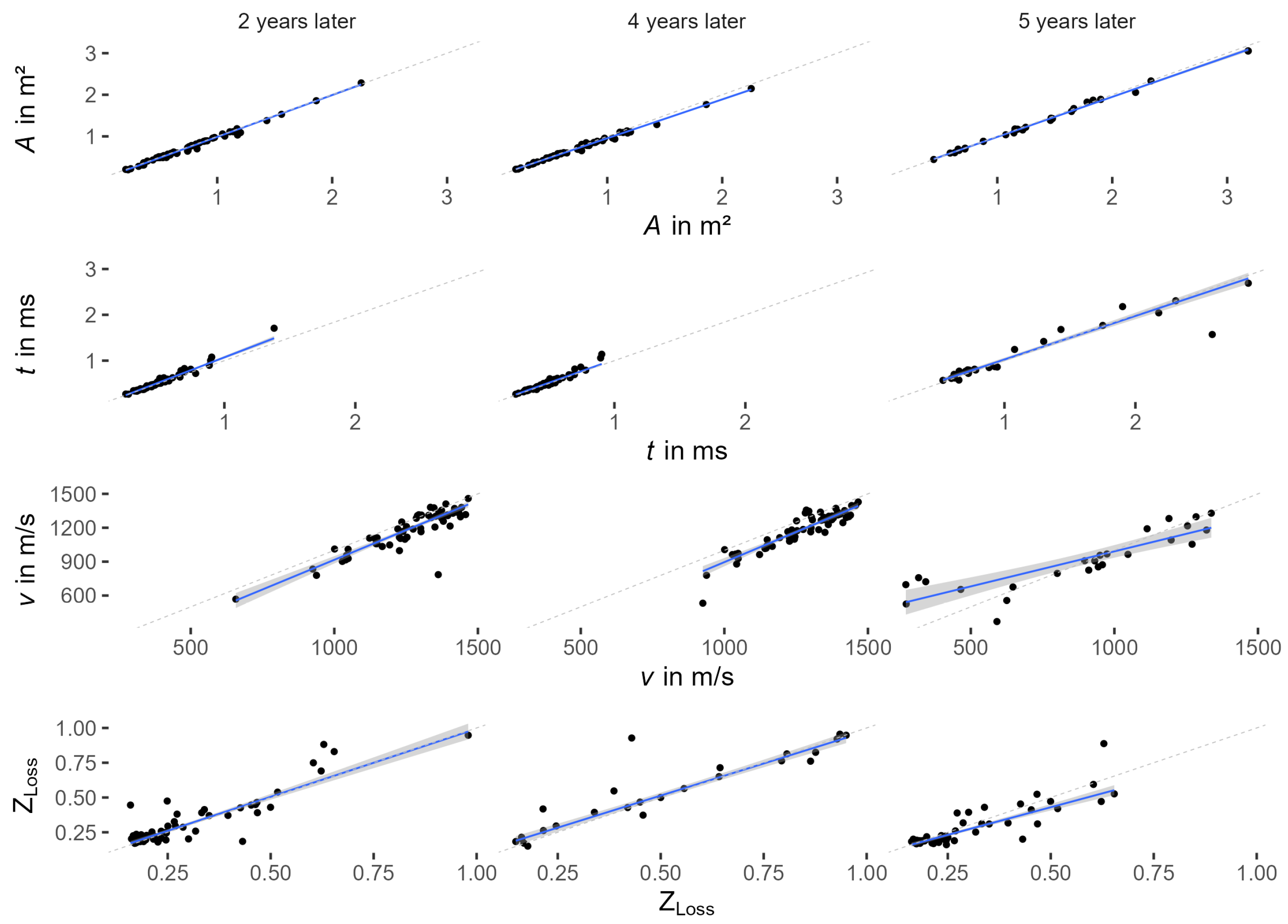
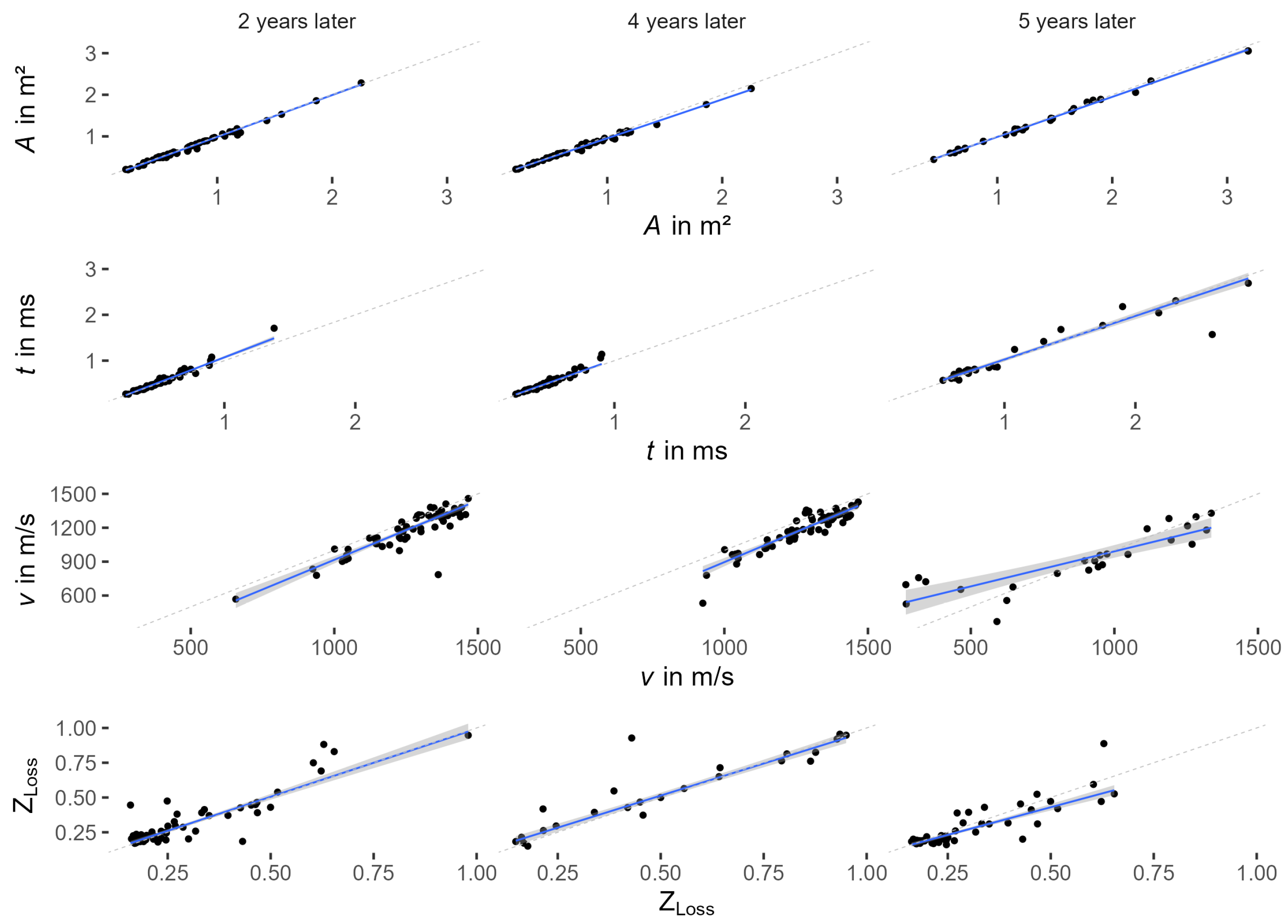
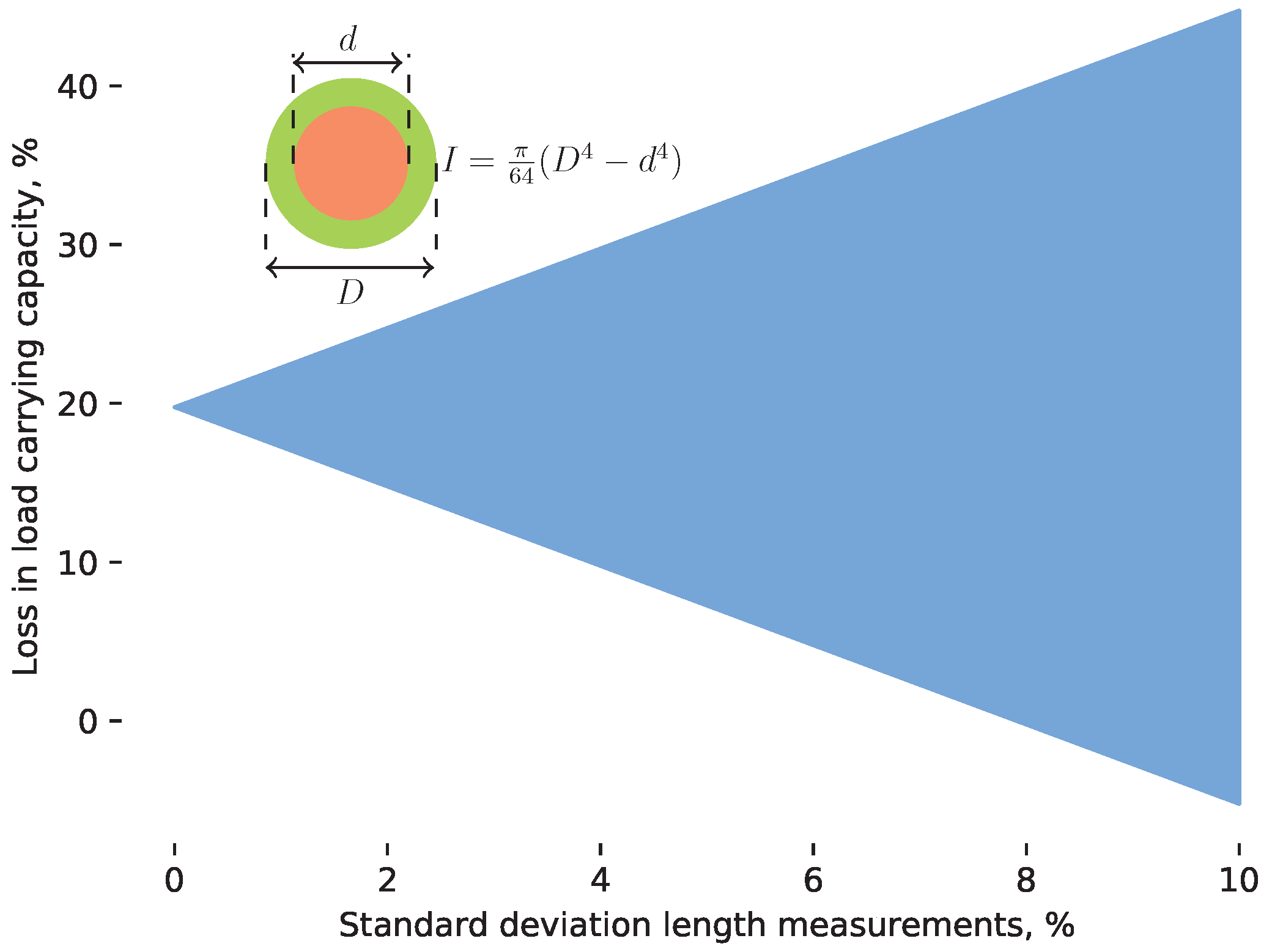
6]. In general, variation between repeated measurements increased with every computational step from raw data to tomograms, and was highest in parameters based on decayed area and section modulus. While measures of decayed area accumulate variation from time-of-flight, distance between sensors, and shape of the cross-section, loss of section modulus (
) is derived from the ratio of two parameters, accumulating all these sources of variation to the third power (Equations (
1)–(
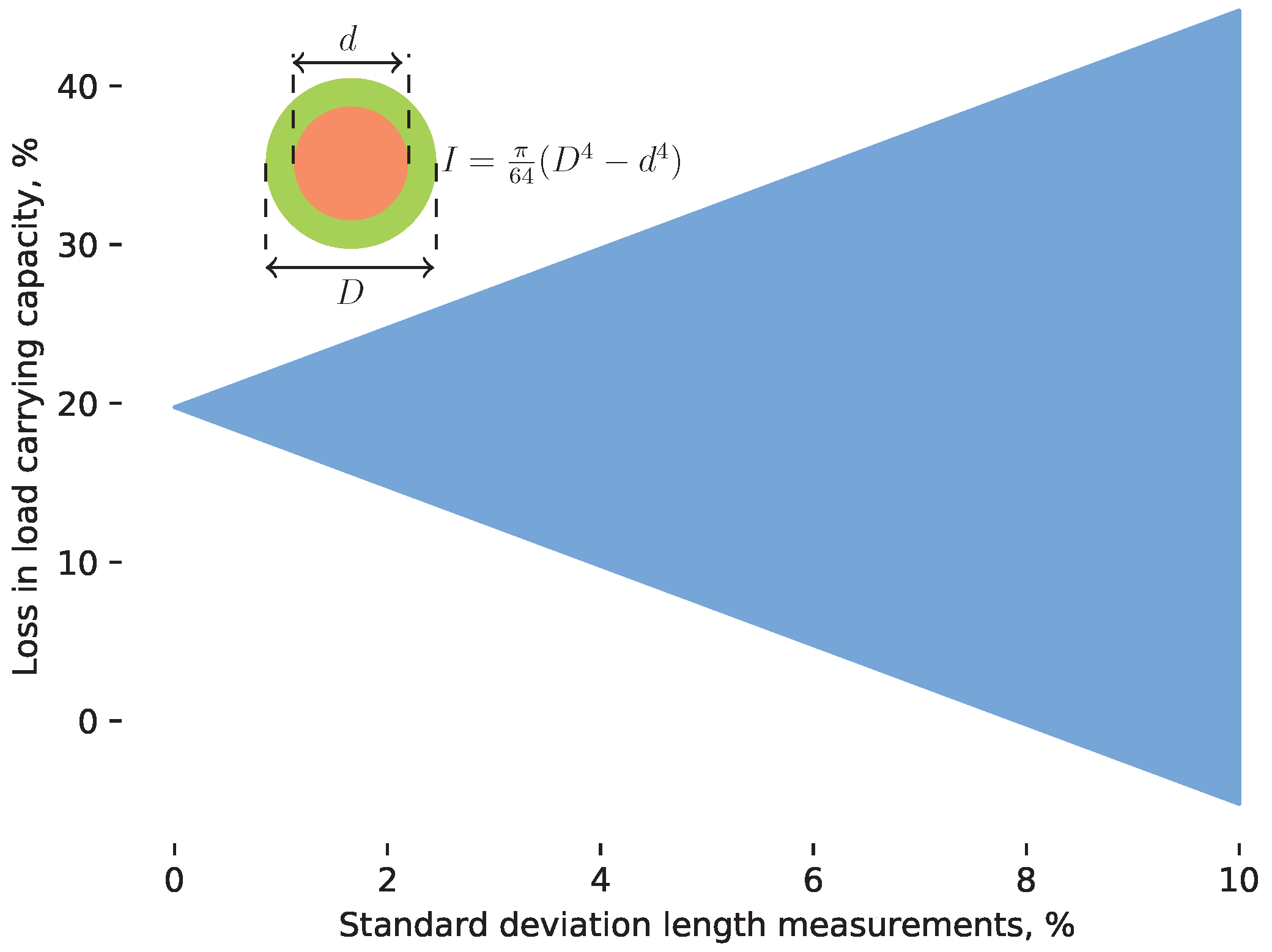
4)). This propagation of variation is further illustrated in
Figure 10. Even for a perfectly round tree with a perfectly round central cavity, length measurements with a standard deviation of 10% result in a standard deviation of 25% in
.
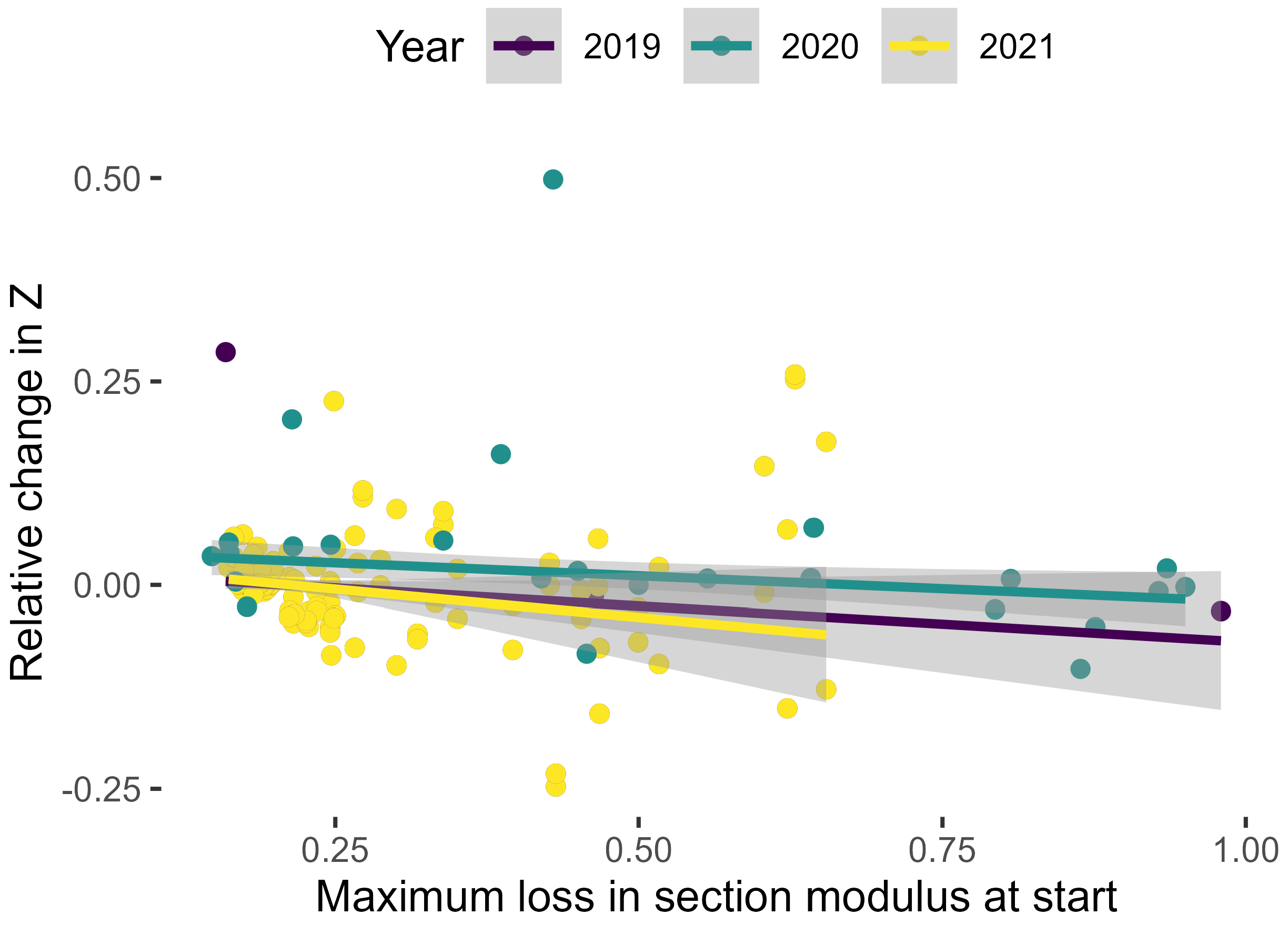
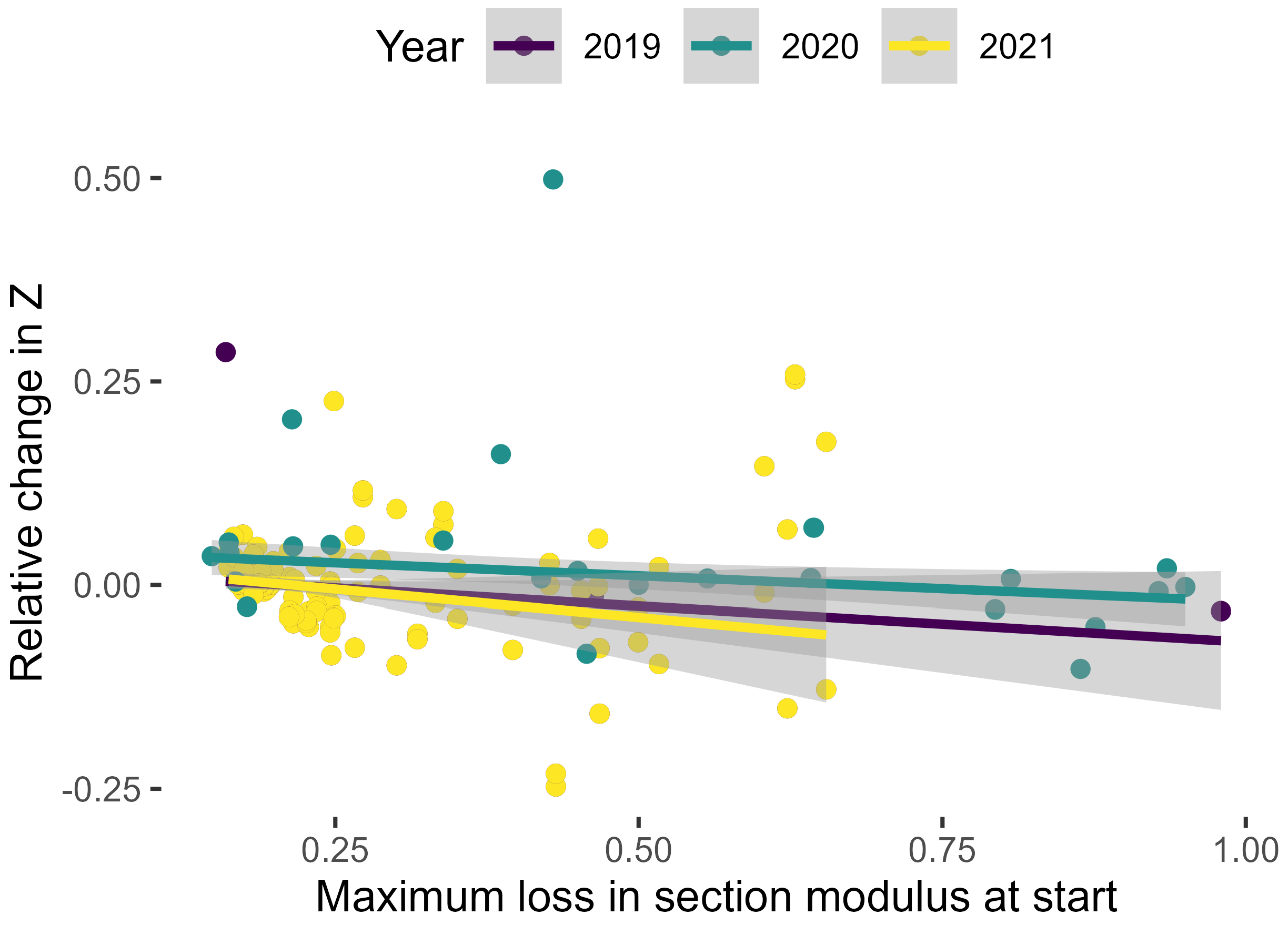
Between repeated measurements, the change in mean
per site ranged from −23% to +7%. Although overall, section modulus decreased with time as would be expected, especially, when the initial
was large, even large positive gains in section modulus were recorded after 5 years of advancing decay (
Figure 11). Because trees cannot repair decay and diameter increment was very low in these old trees, some of these results must be wrong and illustrate the potential impact of apparently small variation of raw data on highly aggregated parameters like
.
At temperatures above freezing, stress wave velocity is not statistically significantly affected by temperature change. This agrees with previous studies [
14,
16,
36,
37,
38,
39,
40,
41]. Only well below freezing, when the stem or parts of it are frozen, velocity increases and affects SoT [
42]. And unlike ERT, SoT is very unlikely to be affected by changing wood moisture content, because reported variation of stress wave velocity above the fibre-saturation point is generally very low [
15,
40,
41,
43,
44,
45], especially when compared to effects of wood decay. Therefor, differences in wood moisture content and wood temperature are unlikely to have contributed to the variation in the tomograms.
It is likely that the main source of variation in SoT is the operator. When SoT was repeated immediately by different operators using the same or different nails and positions,
v changed by up 5%. This was caused by differences in sensor distance
d (≤1% change) and time-of-flight
t (≤6% change). Sensor distance was measured manually with an electronic caliper and therefor varied between operators due to individual levels of accuracy. Time-of-flight
t depends to a small degree on the force of excitation [
46] and is also influenced by the individual operator. For the practical application of SoT in tree risk assessment is important to note that the end product of the method, the area of defects, was not significantly affected by the operator.
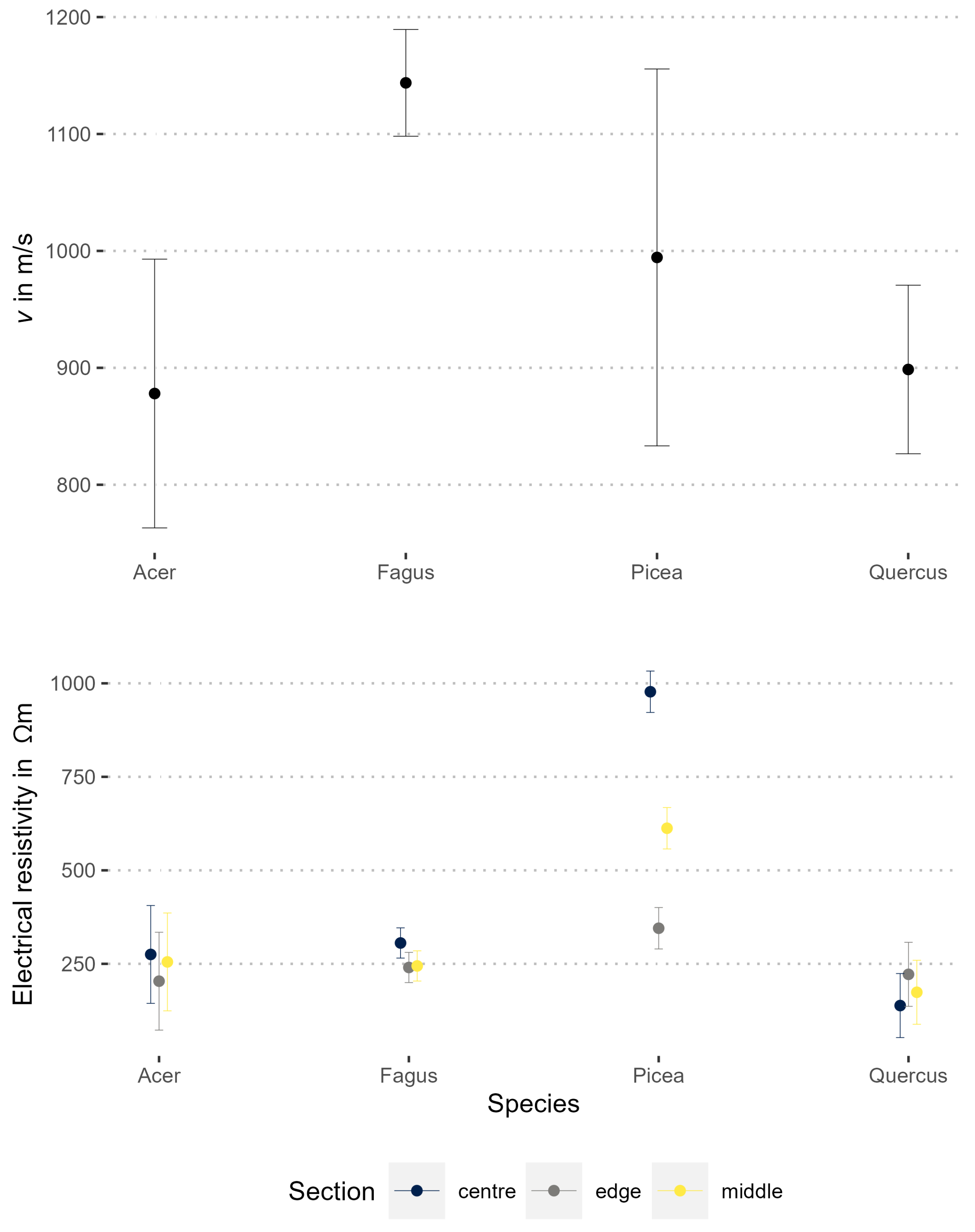
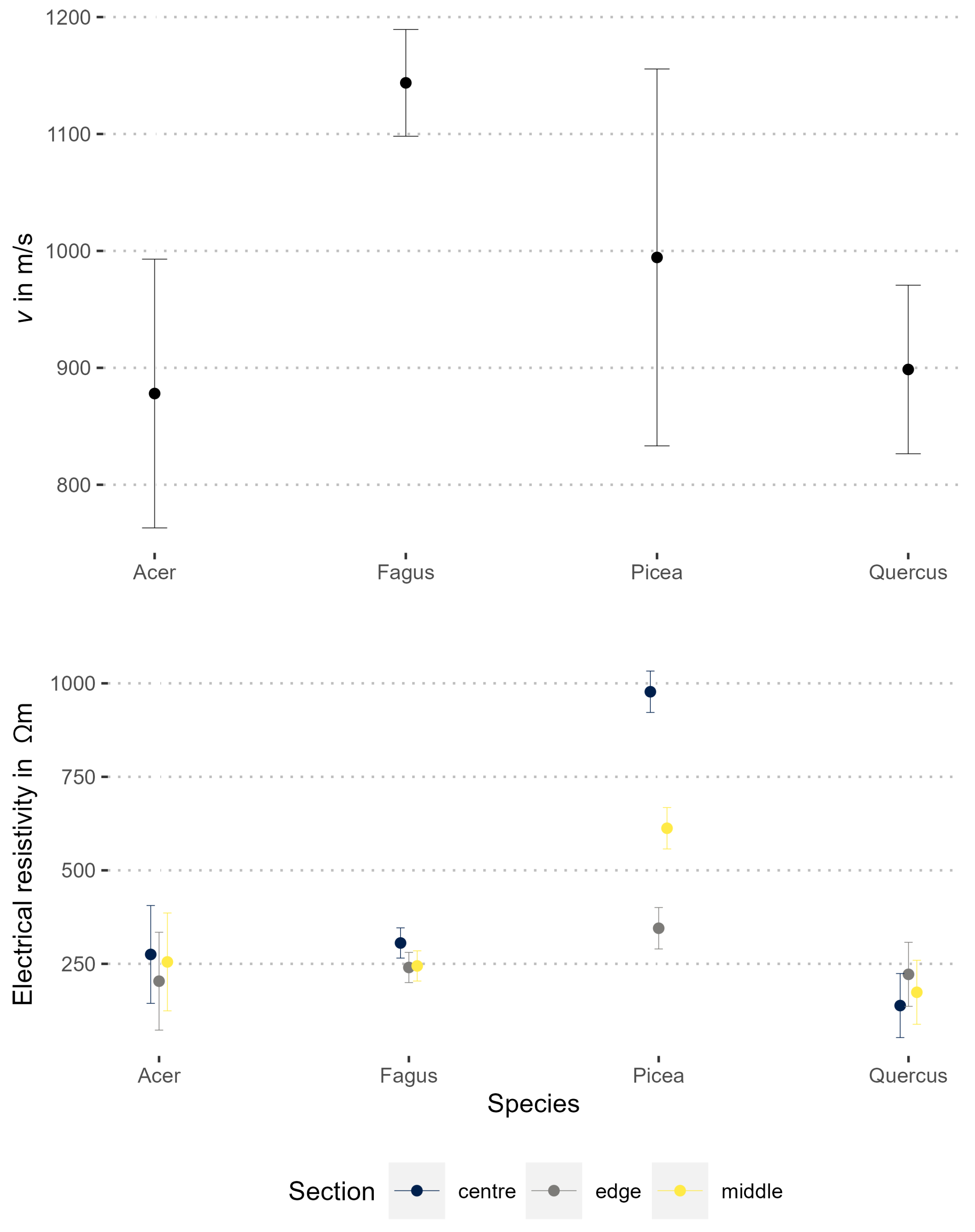
Stress-wave velocity v in beech was statistically significant higher than in the other species (), which did not differ from each other. Most trees had decay, cavities, and cracks in their stems, so that these data might not be representative for the species.
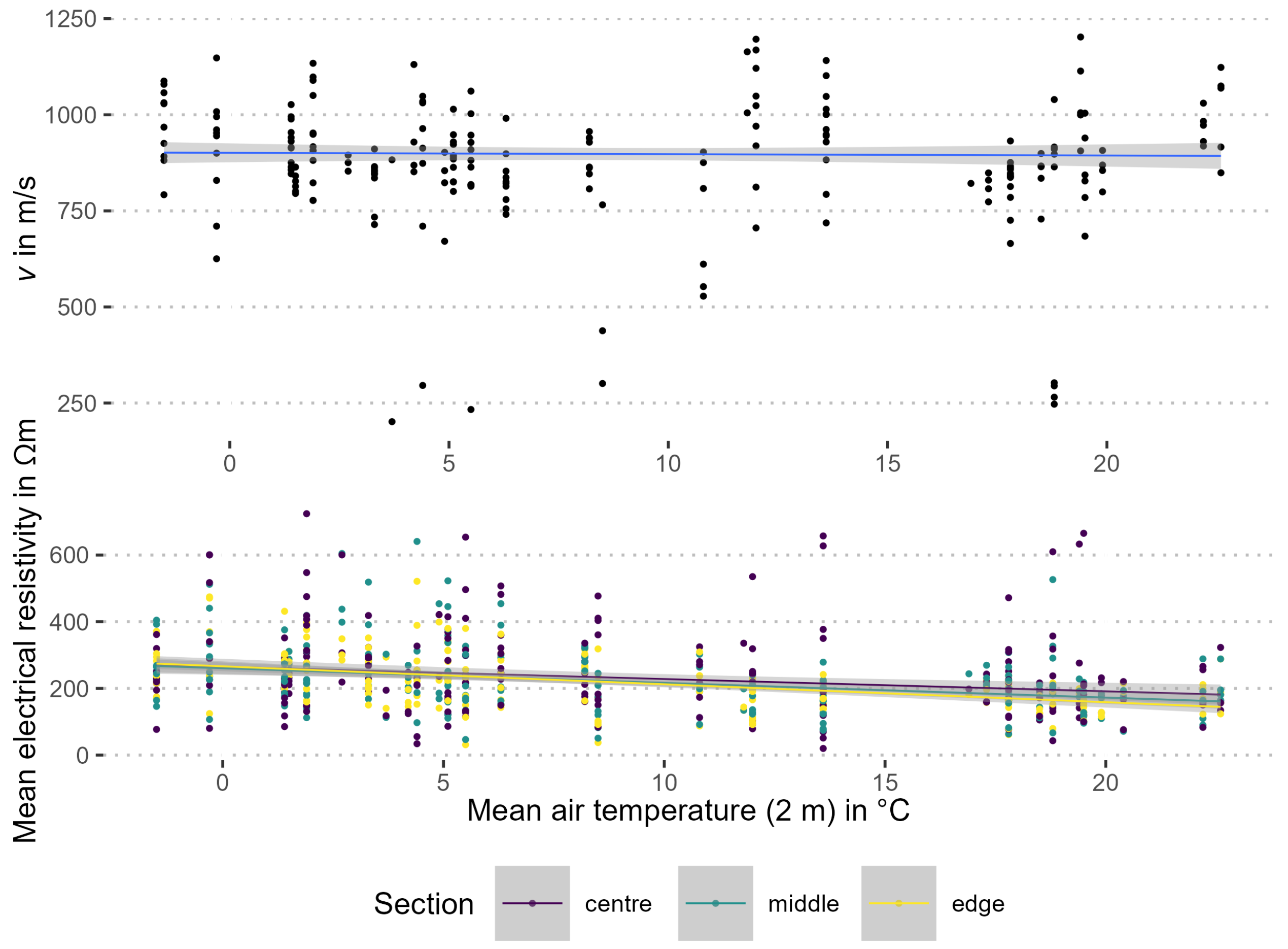
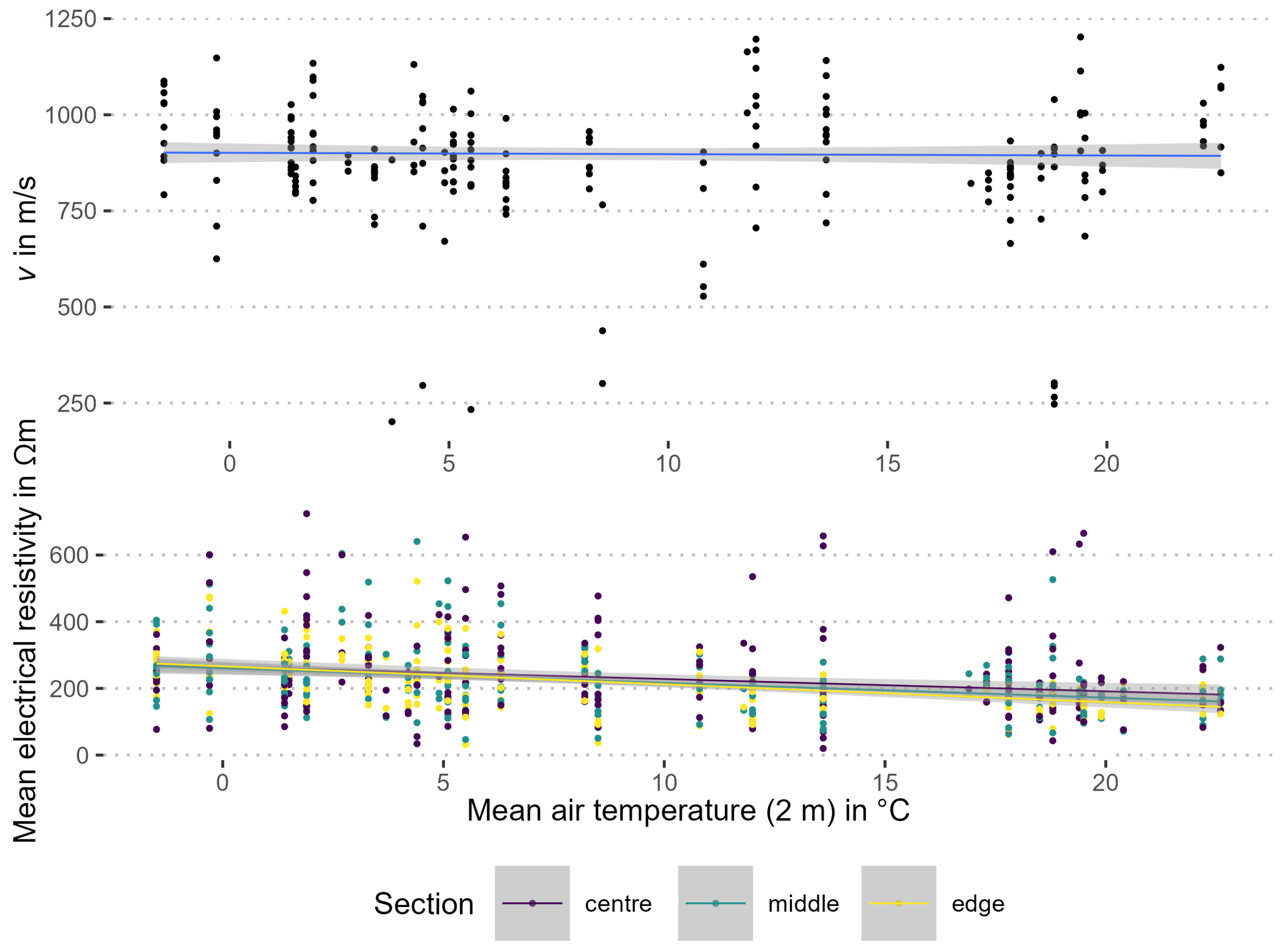
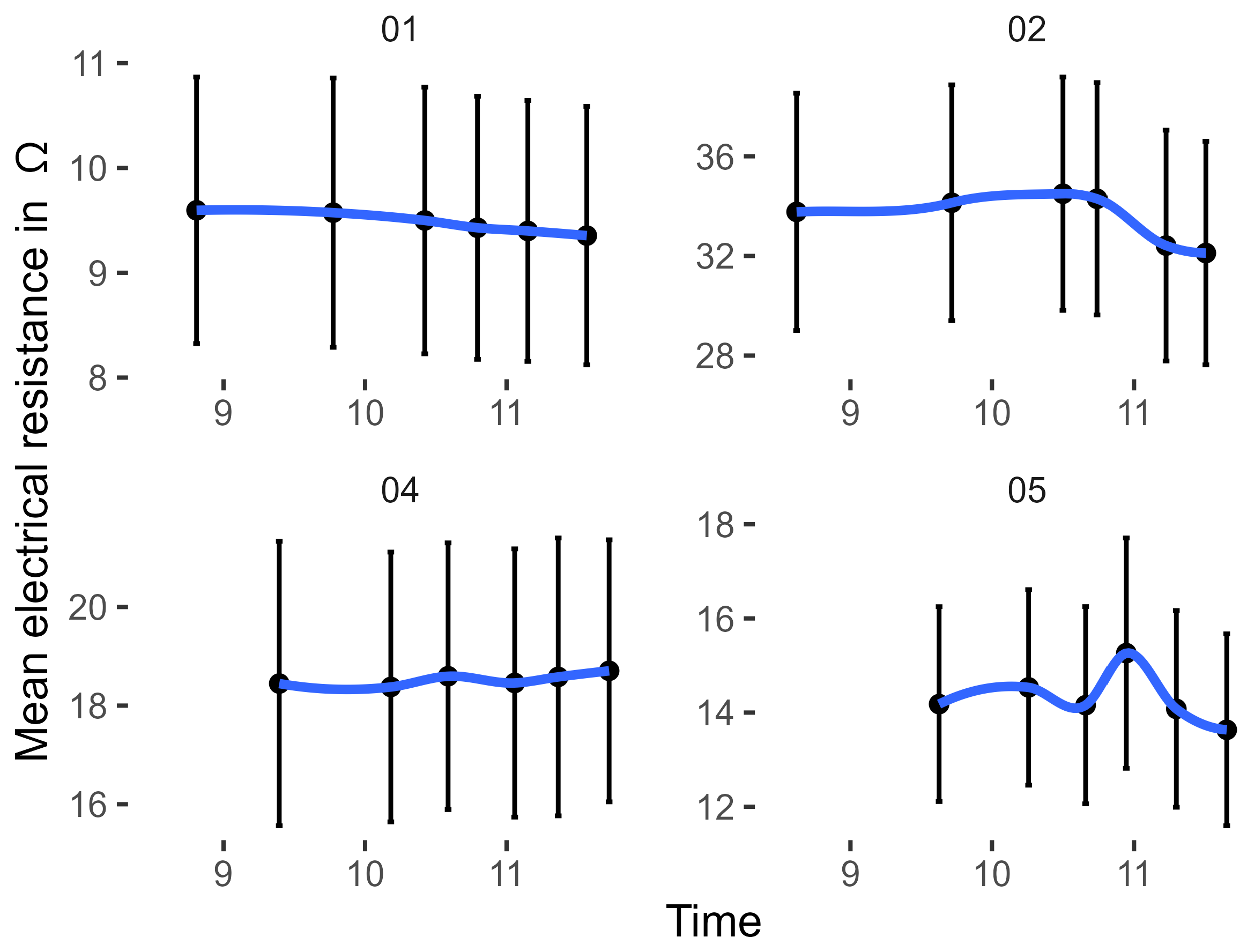
and ERT based on it were less repeatable than
v and SoT. Most likely, varying wood moisture and temperature contributed to this difference. Temperature changes affected
well above 0 °C (
Figure 5), as has already been reported in earlier studies [
17,
18,
35,
47,
48,
49]. Changing irradiation on the stem, and changing stem and sap temperatures, can all cause variability in
at the stem surface and in sap wood. Changes in stem water content during transpiration are a further source of variation [
33], although they are unlikely to affect tomograms of urban trees visibly. Ref. [
19] reported 5% variation in the resistivity between successive measurements, somewhat more than the 2% found in the present study. However, centering the data of each tomogram before further processing [
50] eliminated the correlation with temperature completely (data not shown) and is highly recommended when comparing ERT over time.
In spruce, dry heartwood contributed significantly to variation in
. This is typical for many temperate conifer species and has been used to measure heartwood area [
3,
51,
52].
of the hardwood species in this study was rather homogeneous.
It is important to note, that it is inherent to the process of inversion that the absolute values assigned to a triangle of the mesh are affected by the choice of parameters and thus are less stable than the ratios between all values assigned to the mesh. Lastly, changes in ERT often indicate advancing decay and tend to precede changes in SoT. Thus, they should not be treated as error without further investigation.
The small but significant effects of temperature on ERT that are reported here and have been shown in earlier studies [
17,
18,
35,
47,
48,
49], although relevant for scientific applications of ERT, affected resulting tomograms only marginally. Thus, ERT can be applied by tree assessors together with SoT, as long as temperatures are well above freezing.
Contrary to findings by [
17], long-term installation in
P. abies did not affect ER tomograms.
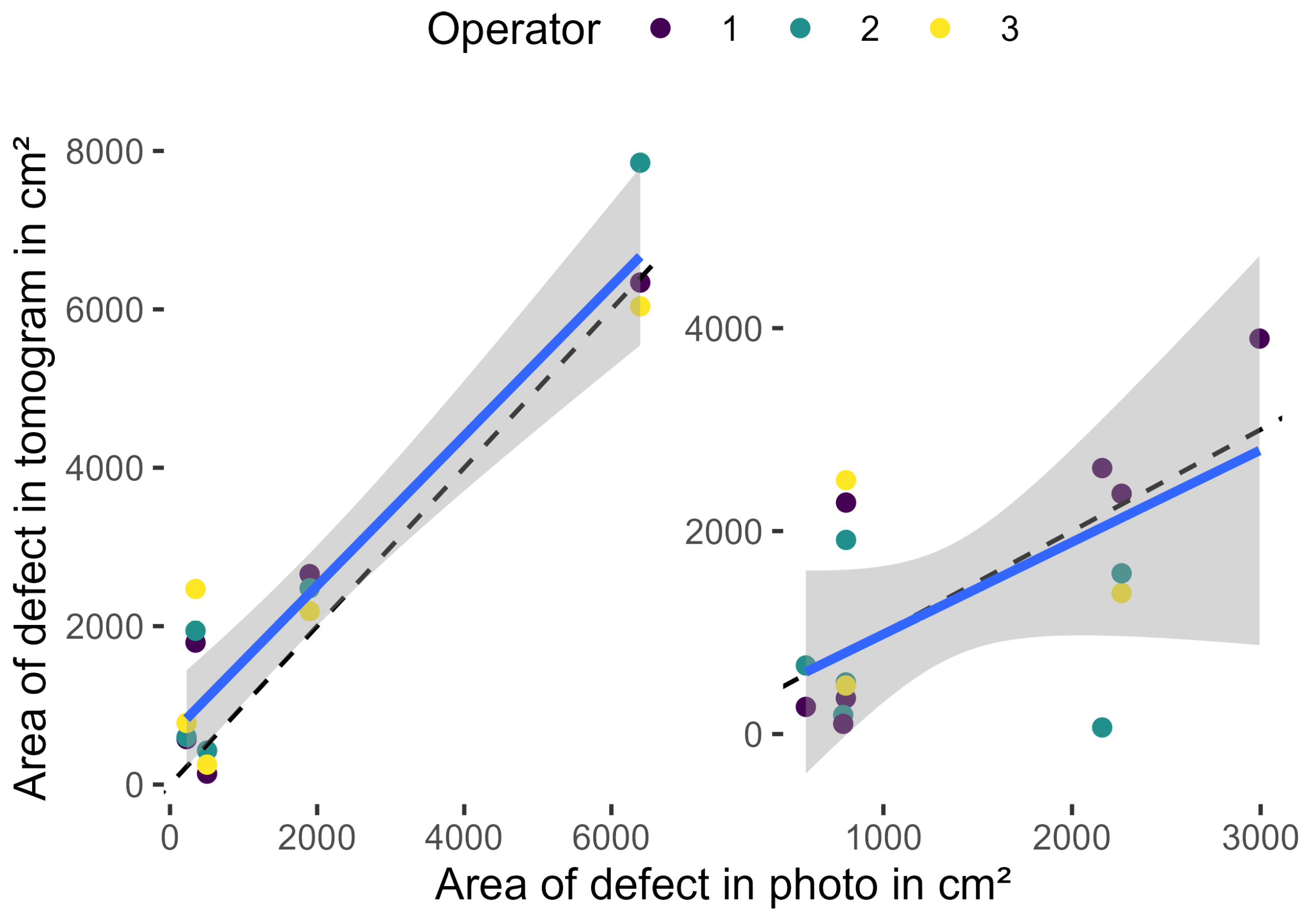
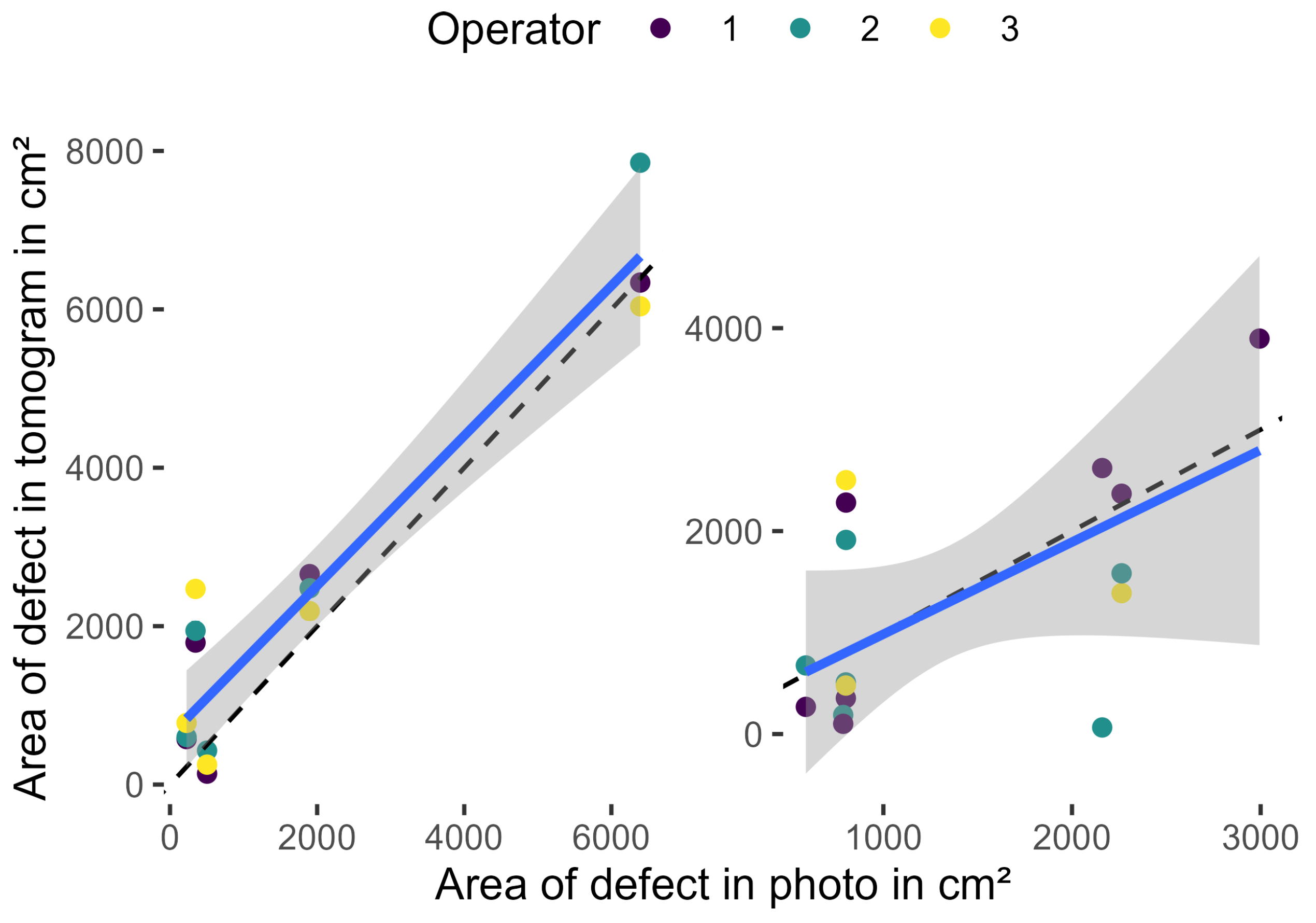
Assessing the quality of tomograms by comparing them to photographic images has proven difficult. Without the assistance of other devices, in this study a penetrometer, the visual delineation of decay in the image is error-prone, as is the necessarily somewhat arbitrary color threshold in the tomogram used to estimate .
Judged by the tomograms, the spread of decay after 2 to 5 years was low for most trees. While the progress of decay has been extensively studied in vitro [
53], much less is known about the speed at which fungi decay standing urban trees [
54], so these results at least indicate a time-frame for follow-up measurements for tree risk assessment. Tomography, and especially the combination of SoT and ERT, is an excellent tool for further non-destructive studies in this field. They would supply tree assessors with much-needed information to decide on the intervals between successive advanced tree assessments.
As long as wood is not frozen, large differences in stem surface temperature are absent (for ERT), sensor positions are recorded and documented precisely, and previous sensor positions are re-used, results of follow-up measurements can safely be interpreted in terms of progress of decay. Although changing sensor positions should in theory not affect tomograms, it will complicate the interpretation of differences between measurements. When repeating a measurement, tree assessors should therefor try to use the same sensor positions whenever possible. Complex derived parameters like loss of load bearing capacity should be interpreted with great caution, because of their amplified uncertainty.
Within these limitations, results should increase confidence in tomographic measurements.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}