
Research on Tree Pith Location in Radial Direction Based on Terrestrial Laser Scanning

Abstract
1. Introduction
2. Theory
2.1. Hypothesis
2.2. Hypothesis Verification
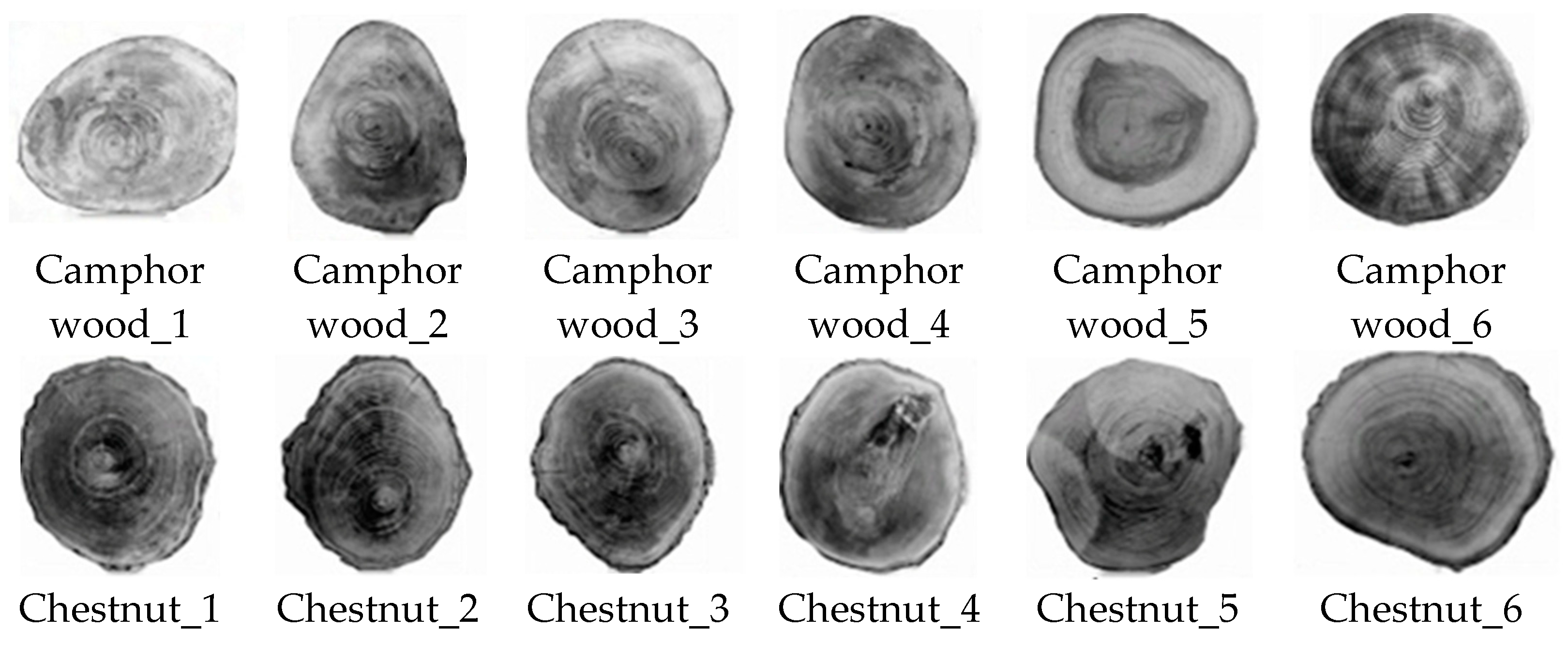
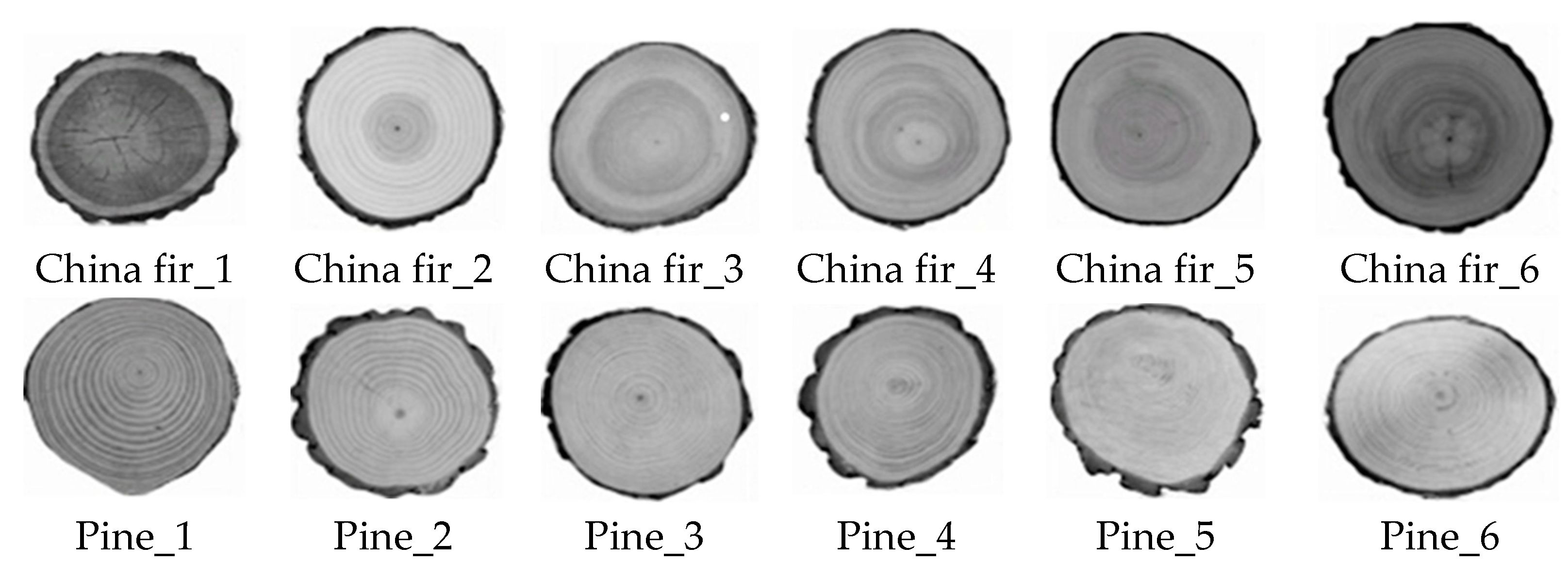
- Image acquisition of tree discs
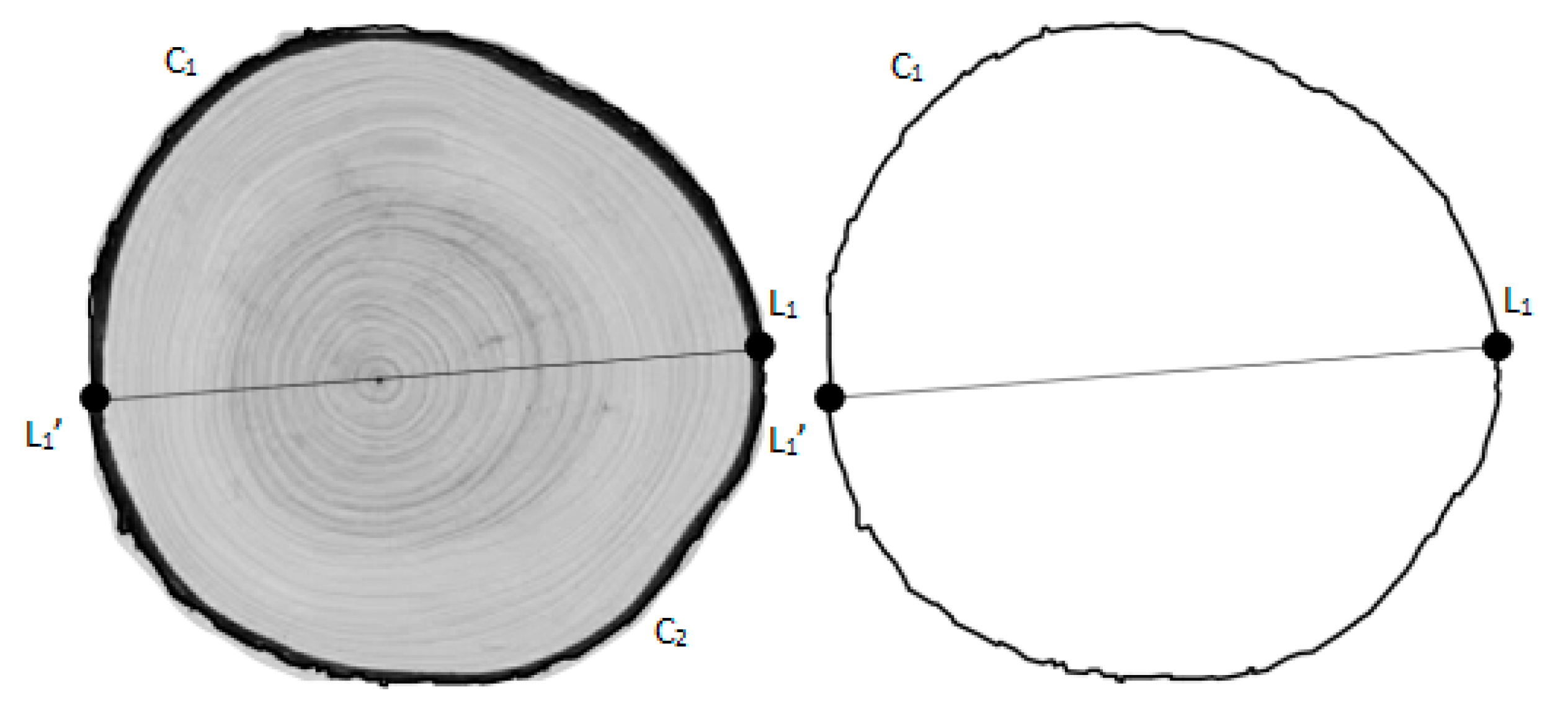
- Verification of geometric properties
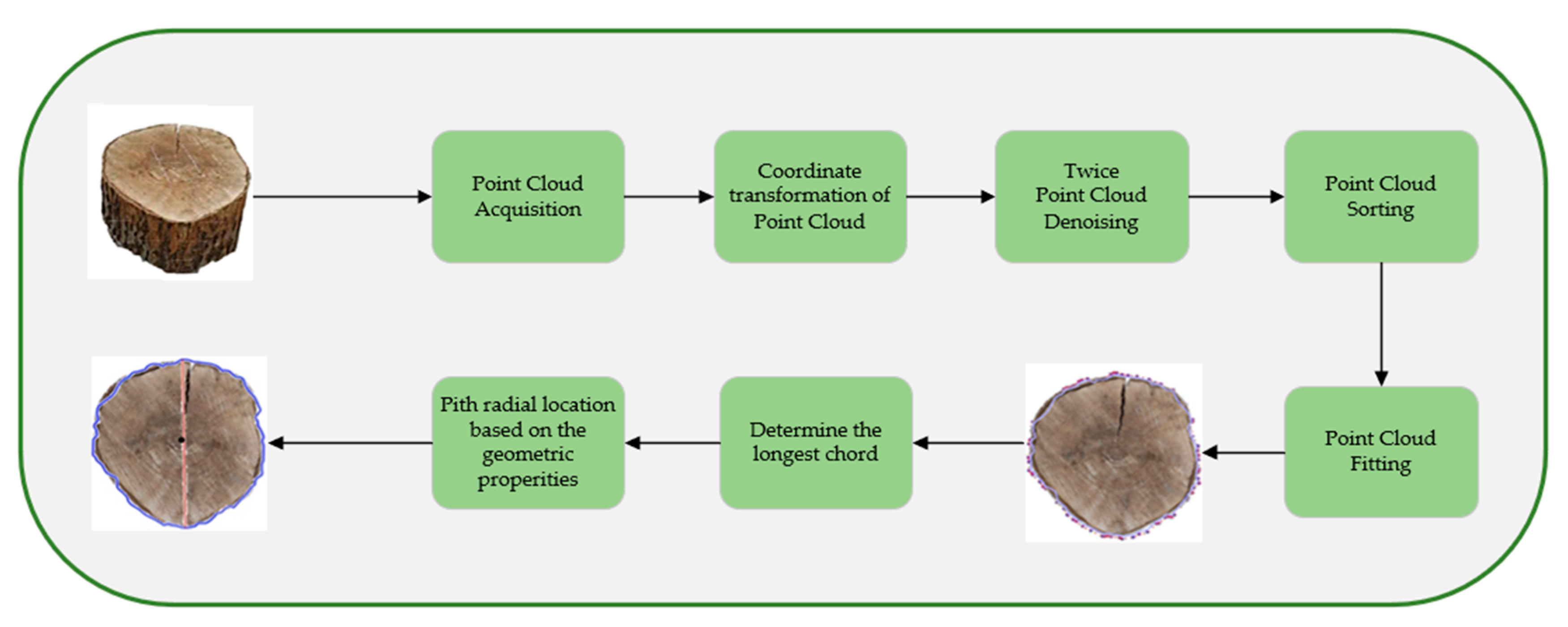
3. Materials and Methods
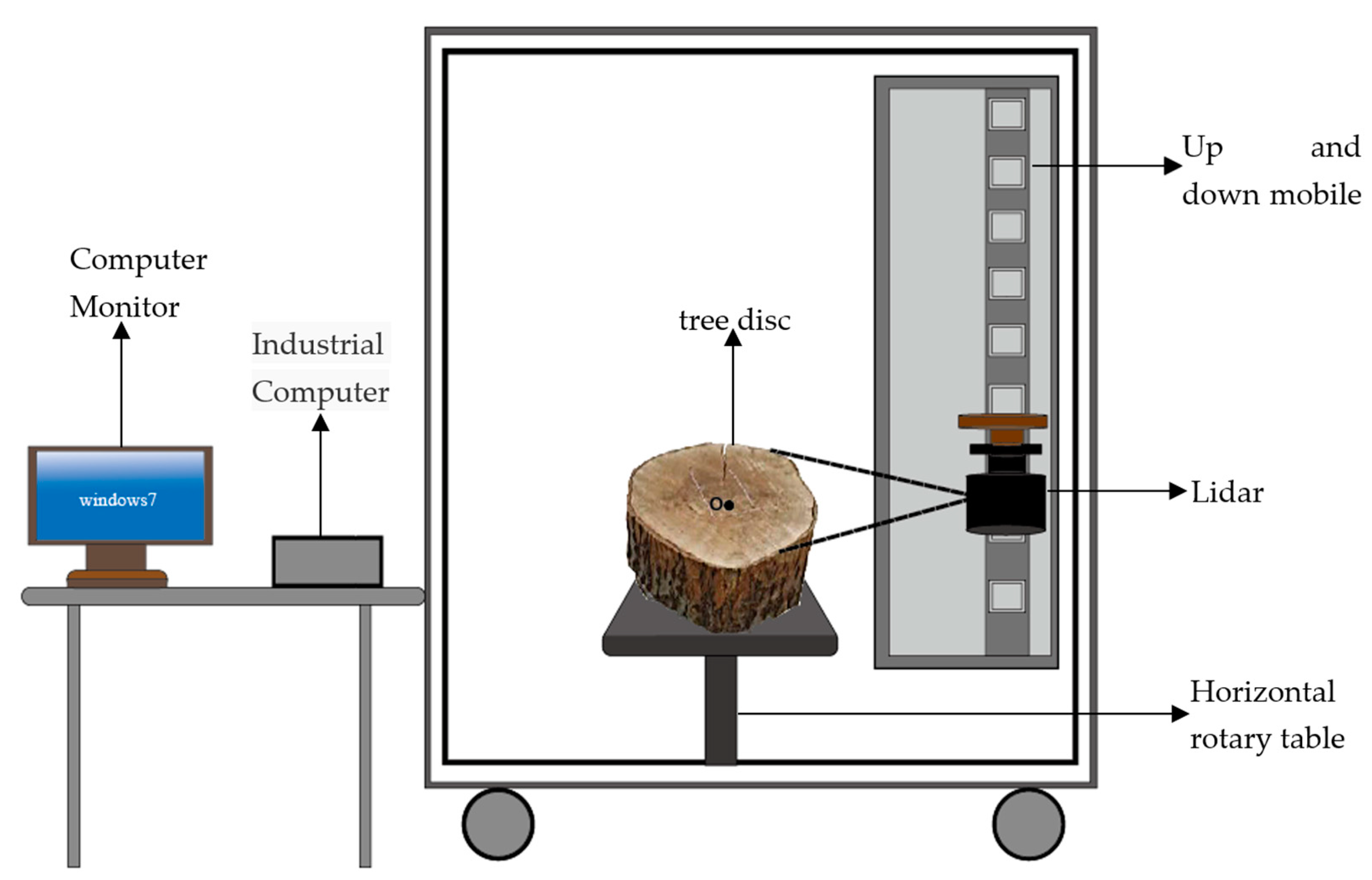
3.1. Data Acquisition
3.2. Data Processing
3.2.1. Point Cloud Coordinate Transformation
3.2.2. Point Cloud Denoising
3.2.3. Point Cloud Sorting
3.3. Point Cloud Fitting of Cross-Section Contour
3.4. Pith Localization in Radial Direction
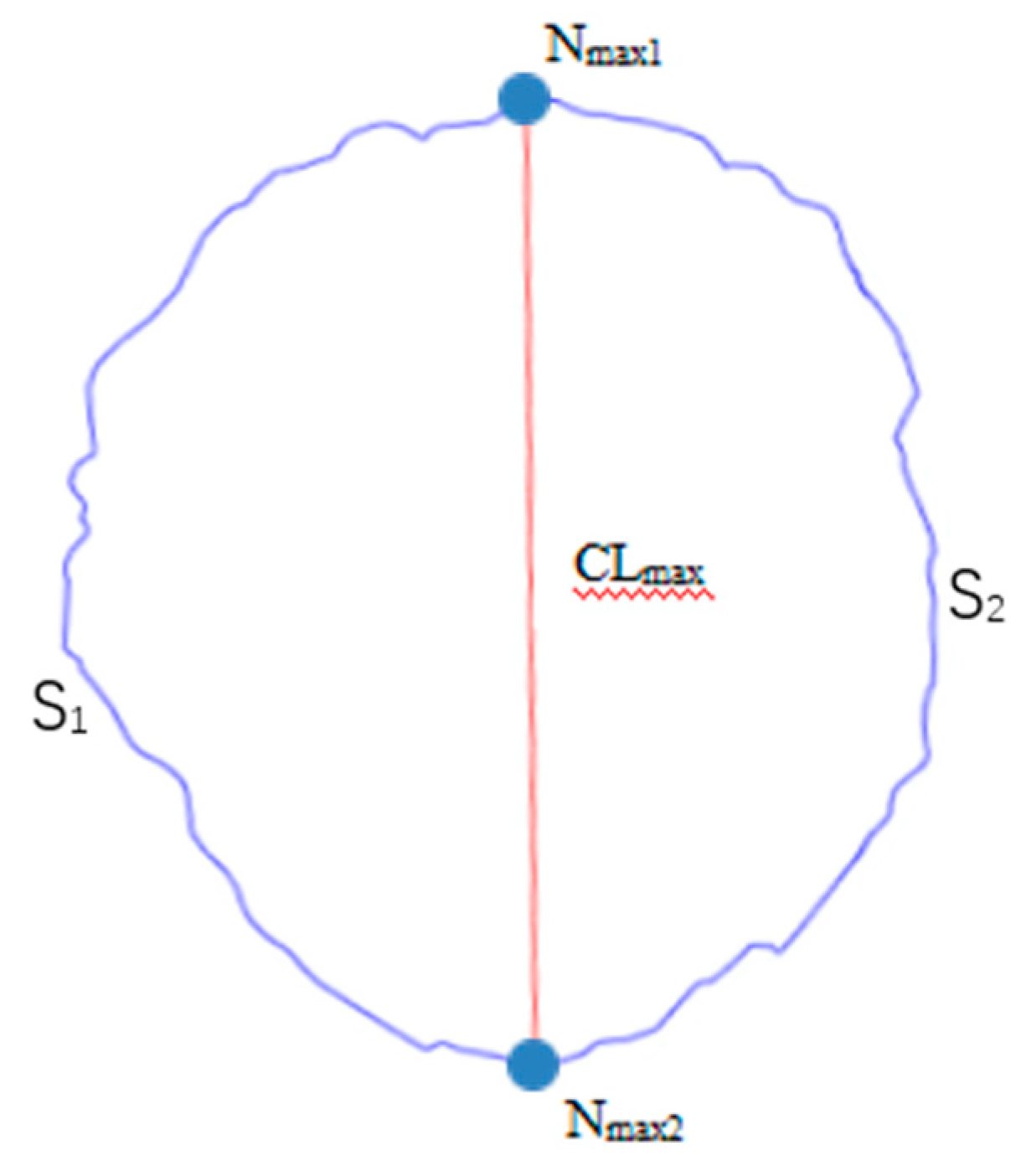
3.4.1. Finding the Longest Chord
3.4.2. The Radial Location of the Pith
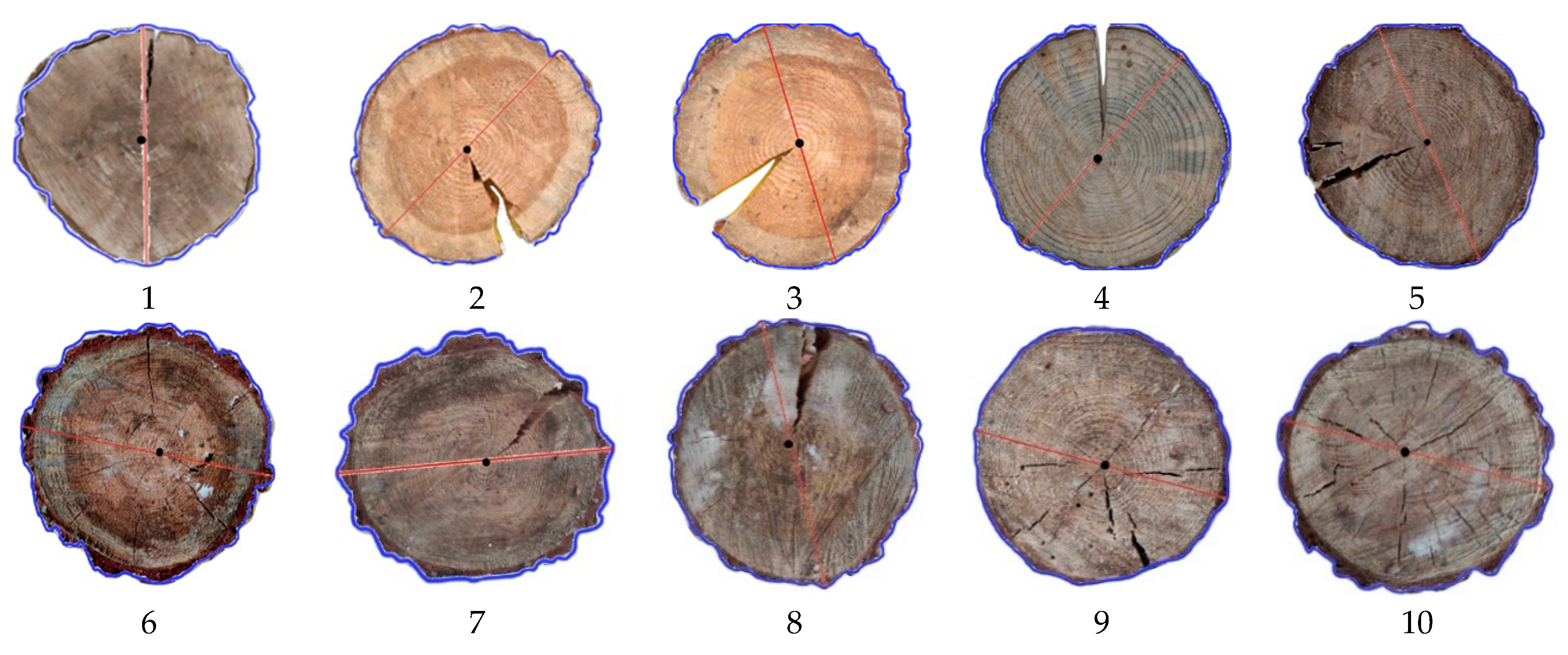
4. Experiment and Analysis
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Youming, X. Wood Science; China Forestry Press: Beijing, China, 2006. [Google Scholar]
- Jianju, L.; Jinyang, L.V. The structure of tree pith and its aesthetic application. J. South. Agric. 2012, 43, 1367–1372. [Google Scholar]
- Cao, T.; Valsta, L.; Harkonen, S.; Saranpää, P.; Mäkelä, A. Effects of thinnin and fertilization on wood properties and economic return for Norway spruce. For. Ecol. Manag. 2008, 256, 1280–1289. [Google Scholar] [CrossRef]
- Ikami, Y.; Murata, K.; Matsumura, Y.; Tsuchikawa, S. Influence of pith location on warp of lumber in sawing medium-quality sugi (Cryptomeria japonicaD. Don) logs. Eur. J. Wood Wood Prod. 2009, 67, 271–276. [Google Scholar] [CrossRef]
- Jie, C. Application of Image Processing Technology and Statistical Method in Automatic Tree Ring Analysis System. Ph.D. Thesis, Xi′an University of Electronic Science and Technology, Xi′an, China, 2013. [Google Scholar]
- Longuetaud, F.; Leban, J.-M.; Mothe, F.; Kerrien, E.; Berger, M.-O. Automatic detection of pith on ct images of spruce logs. Comput. Electron. Agric. 2004, 44, 107–119. [Google Scholar] [CrossRef]
- Arx, G.V.; Dietz, H. Automated image analysis of annual rings in the roots of perennial forbs. Int. J. Plant. Sci. 2005, 166, 723–732. [Google Scholar] [CrossRef]
- Bhandarkar, S.; Faust, T.D.; Tang, M. A system for detection of internal log defects by computer analysis of axial ct images. In Proceedings of the IEEE Workshop on Applications of Computer Vision, Sarasoto, FL, USA, 2–4 December 1996; pp. 258–263. [Google Scholar]
- Boukadida, M.; Longuetaud, F.; Colin, F.; Freyburger, C.; Constant, T.; Leban, J.M.; Mothe, F. Pith Extract: A robust algorithm for pith detection in computer tomography images of wood Application to 125 logs from 17 tree species. Comput. Electron. Agric. 2012, 85, 90–98. [Google Scholar] [CrossRef]
- Zhu, D.; Conners, R.W. A prototype vision system for analyzing ct imagery of hardwood logs. IEEE Trans. Syst. Man Cybern. Part B 1996, 26, 522–532. [Google Scholar] [CrossRef]
- Longuetaud, F.; Saint-Andr, L.; Leban, J.M. Automatic detection of annual growth units on Picea abies Logs Using Optical and X-Ray Techniques. J. Nondestruct. Eval. 2005, 24, 29–43. [Google Scholar] [CrossRef]
- Gazo, R.; Chang, J. Hardwood Log CT scanning—Proof of Concept. In Proceedings of the Joint UNECE Timber Committee Session and Society of Wood Science and Technology International Convention: Innovative Wood Products are the Future, United Nations, Geneva, Switzerland, 11–14 October 2010. [Google Scholar]
- Gazo, R.; Vanek, J.; Abdul_Massih, M.; Benes, B. A fast pith detection for computed tomography scanned hardwood logs. Comput. Electron. Agric. 2020, 170, 105–107. [Google Scholar] [CrossRef]
- Entacher, K.; Hegenbart, S.; Kerschbaumer, J.; Lenz, C.; Planitzer, D.; Seidel, M.; Uhl, A.; Weiglmaier, R. Pith Detection on CT-Cross-Section Images of Logs: An Experimental Comparison. In Proceedings of the International Symposium on Communications, Saint Julian’s, Malta, 12–14 March 2008; IEEE: Piscataway, NJ, USA, 2008. [Google Scholar]
- Alkan, S. Industrial Computed Tomography (CT) Scanning of Subalpine Fir Logs: Proof of Concept; Forintek Canada Corp.: Vancouver, Canada, March 2003. [Google Scholar]
- Perlin, L.P.; do Valle, Â.; Pinto, R.C.D.A. New method to locate the pith position in a wood cross-section based on ultrasonic measurements. Constr. Build. Mater. 2018, 169, 733–739. [Google Scholar] [CrossRef]
- Altman, J.; Dolezal, J.; Čížek, L. Age estimation of large trees: New method based on partial increment core tested on an example of veteran oaks. For. Ecol. Manag. 2016, 380, 82–89. [Google Scholar] [CrossRef]
- Kurdthongmee, W. A comparative study of the effectiveness of using popular dnn object detection algorithms for pith detection in cross-sectional images of parawood. Heliyon 2020, 6, e03480. [Google Scholar] [CrossRef] [PubMed]
- Tongwen, Z.; Shulong, Y.; Yuting, F.; Heli, Z.; Ruibo, Z.; Huaming, S.; Li, Q.; Shengxia, J.; Feng, C. A Calibration Instrument for Measuring the Core Direction of the Growth Cone. CN208937368U, 4 June 2019. [Google Scholar]
- Bucur, V. Nondestructive Characterization and Imaging of Wood; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Jianxun, L.; Dan, L.; Jinqiu, Q.; Xingyan, H.; Feng, L. Study on wood ring width and anatomical morphological characteristics of Toona sinensis. J. Southwest For. Univ. 2015, 35, 95–99. [Google Scholar]
- Qijing, L. Application of digital photos in tree trunk analysis. J. Ecol. 2008, 3, 484–490. [Google Scholar]
- Wu, M.; Xiangdon, L.; Guang, X.; Yingjun, Y.; Quanjun, W. Study on growth model of Quercus mongolica natural forest—IV. Growth model of entering boundary. J. Northwest Univ. Agric. For. Sci. Technol. (Nat. Sci. Ed.) 2015, 43, 58–64. [Google Scholar]
- Jinqiu, Q.; Jianfeng, H.; Jiulong, X.; Bingling, W.; Hao, L. Study on radial variation of ring width and tracheid morphology of Metasequoia glyptostroboides. Guangxi Plants 2014, 34, 27–33. [Google Scholar]
- Huning, W.; Tao, W. Discussion on the research progress of tree age determination method. Green Sci. Technol. 2013, 7, 152–155. [Google Scholar]
- Juanjuan, Z.; Zhicheng, G.; Fang, S.; Yaming, Z. Research on tree ring width measurement based on digital image method. Ind. Instrum. Autom. 2017, 6, 75–77. [Google Scholar] [CrossRef]
- Xingwen, B.; Luo, X.; Shubin, L. Application of AutoCAD in analyzing digital photos of wood disc. For. Resour. Manag. 2013, 2, 145–148. [Google Scholar] [CrossRef]
- Leeuwen, M.V.; Nieuwenhuis, M. Retrieval of forest structural parameters using LiDAR remote sensing. Eur. J. For. Res. 2010, 129, 749–770. [Google Scholar] [CrossRef]
- Liang, X.; Litkey, P.; Hyyppa, J.; Kaartinen, H.; Vastaranta, M.; Holopainen, M. Automatic Stem Mapping Using Single-Scan Terrestrial Laser Scanning. IEEE Trans. Geosci. Remote Sens. 2012, 50, 661–670. [Google Scholar] [CrossRef]
- Lovell, J.; Jupp, D.; Newnham, G.; Culvenor, D. Measuring tree stem diameters using intensity profiles from ground-based scanning lidar from a fixed viewpoint. ISPRS J. Photogramm. Remote Sens. 2011, 66, 46–55. [Google Scholar] [CrossRef]
- Ekevad, M. Method to compute fiber directions in wood from computed tomography images. J. Wood Sci. 2004, 50, 41–46. [Google Scholar] [CrossRef]
- Raumonen, P.; Kaasalainen, M.; Åkerblom, M.; Kaasalainen, S.; Kaartinen, H.; Vastaranta, M.; Holopainen, M.; Disney, M.; Lewis, P. Fast automatic precision tree models from terrestrial laser scanner data. Remote Sens. 2013, 5, 491–520. [Google Scholar] [CrossRef]
- Schraml, R.; Uhl, A. Pith estimation on rough log end images using local Fourier spectrum analysis. In Proceedings of the 14th Conference on Computer Graphics and Imaging (CGIM’13), Innsbruck, Austria, 12 February 2013. [Google Scholar]
- Xiaoyue, W.; Shizhou, Y.; Changzhi, Z.; Guangtian, C. Research and application of data point sorting algorithm of section line. Mech. Manuf. Autom. 2009, 38, 58–59. [Google Scholar]
- Yaohui, L. Implementation of three threshold calculation methods in Matlab 6.5. J. Xiangnan Univ. 2007, 5, 81–84. [Google Scholar] [CrossRef]
- Ya, W.; Xinhua, L.; Haifeng, W. An improved wavelet threshold denoising method and its implementation in MATLAB. Microcomput. Inf. 2006, 6, 266–268. [Google Scholar]
- Xinming, Z.; Lansun, S.; Bo, S. Thresholding method based on feature distance and its application in ophthalmic image segmentation. Chin. J. Image Graph. 2001, 6, 159–163. [Google Scholar] [CrossRef]
- Tannert, T.; Anthony, R.W.; Kasal, B.; Kloiber, M.; Piazza, M.; Riggio, M.; Rinn, F.; Widmann, R.; Yamaguchi, N. In Situ assessment of structural timber using semi-destructive techniques. Mater. Struct. 2014, 47, 767–785. [Google Scholar] [CrossRef]
- Kurdthongmee, W.; Suwannarat, K. Locating Wood Pith in a Wood Stem Cross Sectional Image Using YOLO Object Detection. In Proceedings of the 2019 International Conference on Technologies and Applications of Artificial Intelligence (TAAI), Kaohsiung, Taiwan, 1 November 2019. [Google Scholar]
- Feng, S.; Zhou, H.; Dong, H. Using deep neural network with small dataset to predict material defects. Mater. Des. 2019, 162, 300–310. [Google Scholar] [CrossRef]
- Matlab Chinese Forum. Analysis of 30 Cases of MATLAB Neural Network; Beijing University of Aeronautics and Astronautics Press: Beijing China, 2010. [Google Scholar]
- Du, X.; Li, S.; Li, G.; Feng, H.; Chen, S. Stress Wave Tomography of Wood Internal Defects using Ellipse-Based Spatial Interpolation and Velocity Compensation. Bioresources 2015, 10. [Google Scholar] [CrossRef]
- Feng, H.; Li, G.; Fu, S.; Wang, X. Tomographic Image Reconstruction Using an Interpolation Method for Tree Decay Detection. Bioresources 2014, 9, 3248–3263. [Google Scholar] [CrossRef]
- Xiaoyong, X.; Taiyong, Z. Construction of cubic spline interpolation function and its implementation in MATLAB. Ordnance Autom. 2006, 25, 76–78. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Species | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| camphorwood | 3.91 | 4.66 | 0.56 | 6.07 | 3.63 | 0.88 | 3.71 | 0.99 | 4.43 | 6.18 | 2.52 | 7.58 |
| chestnut | 7.33 | 1.54 | 2.78 | 8.58 | 3.12 | 4.64 | 3.43 | 0.21 | 6.66 | 1.66 | 1.90 | 0.51 |
| China fir | 7.75 | 0.02 | 1.25 | 7.74 | 1.01 | 1.72 | 1.40 | 4.39 | 5.90 | 2.13 | 2.29 | 6.39 |
| pine | 2.60 | 2.82 | 2.56 | 3.94 | 0.97 | 6.75 | 6.28 | 2.40 | 8.15 | 0.94 | 2.45 | 3.64 |
| Species | Mean Value (cm) | Lower Limit of 95% Confidence Interval (cm) | Upper Limit of 95% Confidence Interval (cm) |
|---|---|---|---|
| camphorwood | 3.76 | 2.34 | 5.18 |
| chestnut | 3.53 | 1.80 | 5.26 |
| China fir | 3.86 | 1.77 | 5.94 |
| pine | 3.62 | 2.17 | 5.08 |
| Species | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| camphor-wood | 4.3% | 3.8% | 5.4% | 4.7% | 5.1% | 4.9% | 5.1% | 4.4% | 4.8% | 5.9% | 5.0% | 4.2% |
| chestnut | 5.3% | 4.4% | 5.0% | 4.6% | 5.7% | 5.3% | 5.2% | 5.7% | 5.2% | 6.9% | 4.3% | 5.0% |
| China fir | 4.1% | 5.6% | 4.0% | 4.9% | 4.7% | 4.3% | 6.6% | 6.5% | 4.0% | 4.8% | 4.7% | 4.2% |
| pine | 5.2% | 6.3% | 6.1% | 5.9% | 4.9% | 4.2% | 5.1% | 4.2% | 4.4% | 6.8% | 5.4% | 4.9% |
| Species | Mean Value | Lower Limit of 95% Confidence Interval | Upper Limit of 95% Confidence Interval |
|---|---|---|---|
| camphorwood | 4.80% | 4.44% | 5.16% |
| chestnut | 5.22% | 4.78% | 5.66% |
| China fir | 5.47% | 4.83% | 6.10% |
| pine | 5.28% | 4.75% | 5.82% |
| Parameters | Value |
|---|---|
| work area | 0.5 m–40 m |
| operation temperature | −40 °C–+60 °C |
| working voltage | 9 V DC–30 V DC |
| opening angle | 270° |
| angular resolution | 0.25°–0.5° |
| scanning frequency | 25 Hz–50 Hz |
| response time | ≥20 ms |
| measurement error | ±12 mm (0.5 m–10 m) ±20 mm (10 m–20 m) ±35 mm (20 m–40 m) |
| Samples. | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| ΔC (cm) | 1.46 | 1.17 | 4.56 | 5.59 | 2.24 | 1.48 | 5.93 | 0.72 | 1.04 | 0.31 |
| E | 2.7% | 2.4% | 2.3% | 4.6% | 4.4% | 3.7% | 3.9% | 4.7% | 4.4% | 3.8% |
| Samples | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| ECL | 0.17% | 0.21% | 1.27% | 3.65% | 1.29% | 0.48% | 1.45% | 1.44% | 3.00% | 1.46% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, Y.; Wang, D.; Wang, Z.; Tian, L.; Zheng, C.; Tian, Y.; Liu, Y. Research on Tree Pith Location in Radial Direction Based on Terrestrial Laser Scanning. Forests 2021, 12, 671. https://doi.org/10.3390/f12060671
Cao Y, Wang D, Wang Z, Tian L, Zheng C, Tian Y, Liu Y. Research on Tree Pith Location in Radial Direction Based on Terrestrial Laser Scanning. Forests. 2021; 12(6):671. https://doi.org/10.3390/f12060671
Chicago/Turabian StyleCao, Yun, Danyu Wang, Zewei Wang, Lijing Tian, Change Zheng, Ye Tian, and Yi Liu. 2021. "Research on Tree Pith Location in Radial Direction Based on Terrestrial Laser Scanning" Forests 12, no. 6: 671. https://doi.org/10.3390/f12060671
APA StyleCao, Y., Wang, D., Wang, Z., Tian, L., Zheng, C., Tian, Y., & Liu, Y. (2021). Research on Tree Pith Location in Radial Direction Based on Terrestrial Laser Scanning. Forests, 12(6), 671. https://doi.org/10.3390/f12060671