1. Introduction
Floods are associated with high rainfall intensities and occur when recipients cannot receive all the water, causing them to spill over into the surrounding areas [
1]. Flooded areas are land susceptible to being inundated by water from any source, which usually presents as low, frequently flooded habitats along the coast on river islands and reefs, usually in the river’s immediate vicinity depending on the micro-relief and in remote areas of the river valley [
2]. About 9% of the land area of the Republic of Croatia (approximately 500,000 ha) can be described as a frequently flooded area, which means that there occurs at least one flooding event in a period of three to five years, and part of that area can be considered as wetland habitats [
2]. Floodplain forests and rivers are an indivisible whole. In the floodplain, the appearance of forest stands (morphology) and the spatial distribution of wood biomass (structure) are particularly affected by the water regime and edaphic features. Any change in the water regime affects forest stands, especially their origin and dynamics. This impact can be direct (frequency, height and duration of floodwaters, and the occurrence of floodwater freezing) and indirect (spatial and temporal dynamics of soil moisture, groundwater, and precipitation) [
3].
For the analysis and management of floods and the assessment of damages, it is necessary to determine the maximum extent of floods [
4], so it is extremely important to define the boundaries of flooded areas as quickly as possible [
5]. The boundaries of flooded areas can be collected by in situ [
6] or remote sensing data [
7,
8,
9,
10]. The extent of flooding determined in situ has shortcomings due to the possible limited spatial and temporal resolution data at a significant cost [
11].
Remote sensing data such as aerial [
12] and satellite imagery [
13] as well as other geospatial data [
14] are useful in mapping and monitoring wetlands. Aerial imagery is traditionally used [
4], with the beginning of this century representing the starting point of the effective application of multispectral and synthetic aperture radar satellite (SAR) imagery in the mapping and monitoring of these habitats [
15,
16]. Despite the above, the robustness of most of today’s radar satellite sensors is often an obstacle for detailed and accurate mapping of the wetlands; namely, the image resolution is too low [
17]. On the other hand, high spatial resolution optical sensors allow more accurate determination of floodplain boundaries [
4]. However, the data quality depends on weather conditions [
5]; in the case of cloud or fog, the optical sensor cannot provide quality information [
11,
18]. Additional problems are present in areas overgrown with dense forests covering water surfaces and preventing the penetration of radiation through dense forest canopies [
19] and in the case where water surfaces are covered with floating and other vegetation [
12].
It is difficult to detect inundation (flooding) under tree canopies (e.g., dense and closed forests) with the optical spectrum, except in cases of an open and incomplete canopy [
20]. Satellite overflights often do not coincide with the moment of reaching the extreme value of the analyzed phenomenon when it comes to archival images [
5], while for accurate flood detection and associated dynamics, they require a short revisit time (temporal resolution) [
17]. Therefore, the absence of additional corrections may result in an underestimated or overestimated size of the flooded area [
5,
21].
SARs are active sensors that operate in the microwave part of the electromagnetic spectrum. They are considered active because they have an energy source (impulses of a certain wavelength and polarization) that emits and receives backscattering (reflection) of the measured surface [
22,
23]. SAR remote sensing depends on the availability of SAR scenes and the purpose of a particular mission. Most satellite SAR missions are operational in the X (2.5–3.75 cm), C (3.75–7.5 cm), or L band (15–30 cm) [
20,
23]. The attractiveness of the SAR is due to the operational advantage of conducting all-day (7/24) imaging [
24]. Compared to most other sensors, these advantages allow imaging (monitoring and mapping) of the Earth regardless of weather conditions (clouds, fog, rain, and other weather disasters) and lighting [
23,
25]. Therefore, they are becoming an increasingly important source of environmental information [
26]. Moreover, SAR impulses after emits have an interaction with the observed surface area and then receive backscattering signals that create imagery totally different to optical sensors. Based on that, SAR imagery allows the acquisition of additional data (new information) regarding the environment [
27]. Objects in SAR scenes may differ if the associated backscatter components are different and if the spatial resolution is sufficient to distinguish the objects [
28].
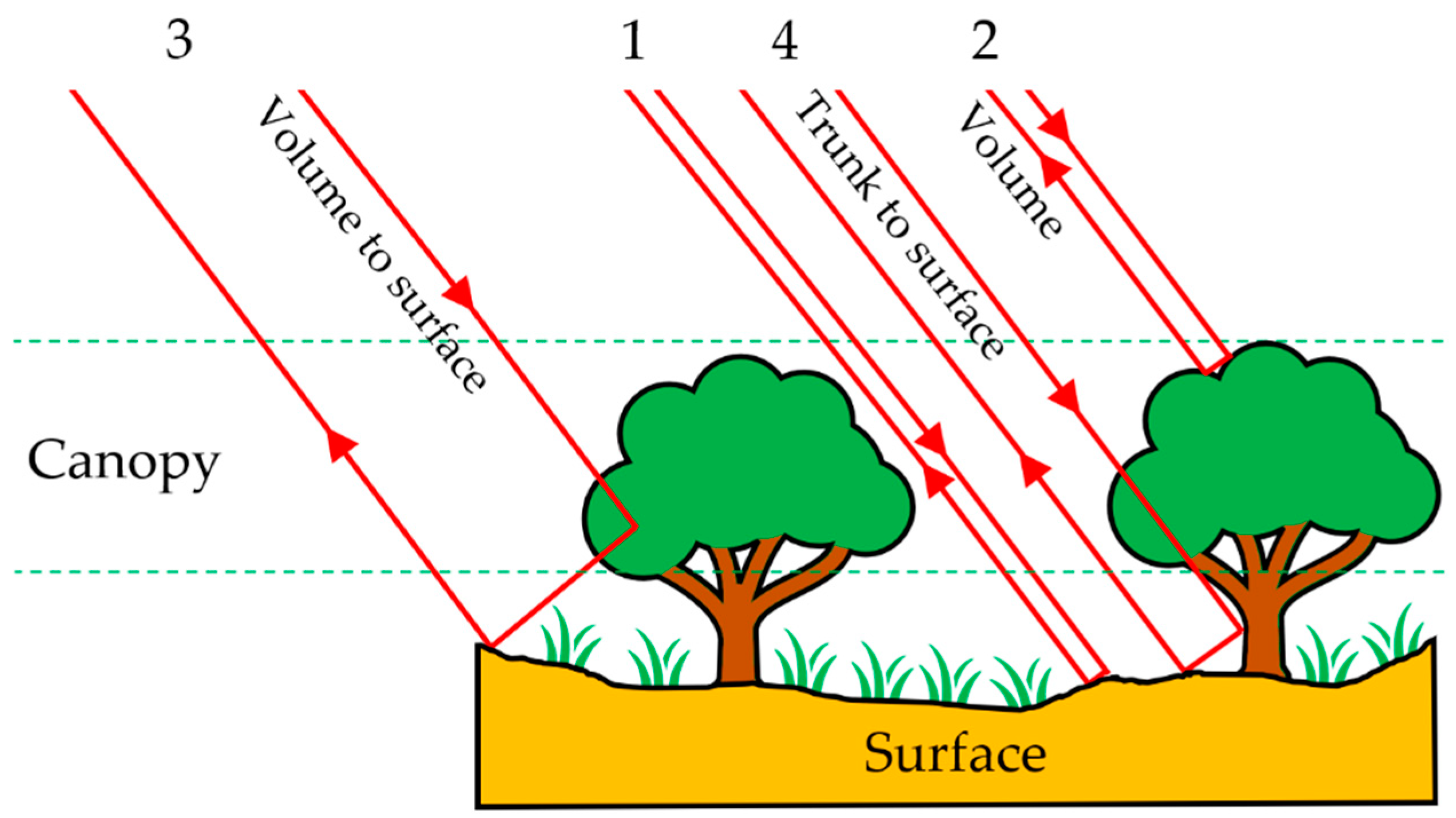
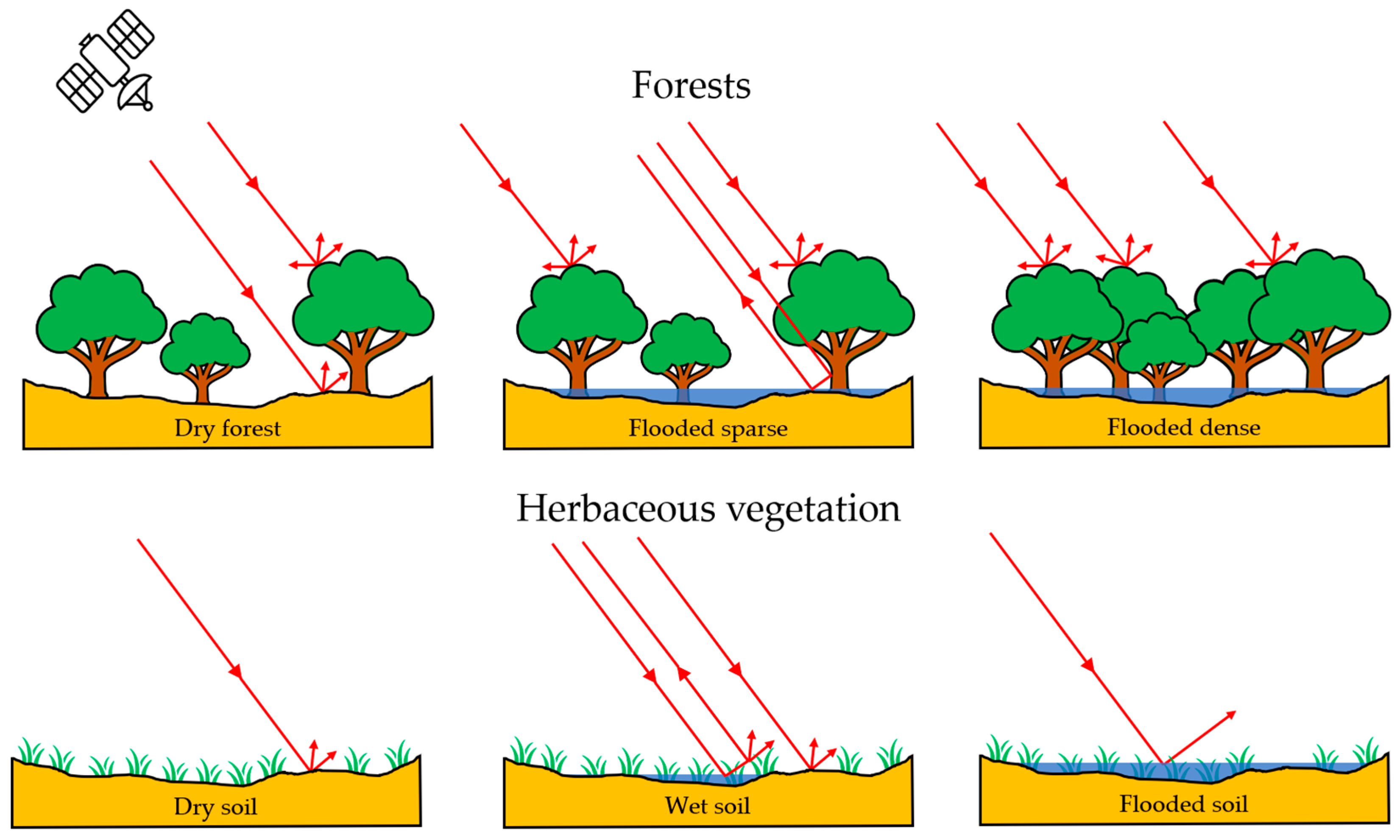
The strength (intensity) of the feedback signal is expected to increase during the presence of water under the vegetation canopy due to double or multiple interactions between the water surface and the vertical vegetation structure [
20]. During the first studies of the application of SAR to the observation of objects on Earth, it was previously observed that floods under the forest canopy could be detected due to increased feedback (scattering) caused by the interaction of water and stems [
29]. Therefore, in wet habitats in woody vegetation, the presence of water under the canopy increases the feedback signal, while it is weakened in grassy (herbaceous) vegetation [
30]. As floods are often associated with heavy rain (and other atmospheric disturbances), which makes optical satellite data inaccessible [
31], SAR sensors have proven to be more suitable than optical instruments in flood detection under forest canopies [
7,
15,
20,
29,
32].
Due to the ecological complexity of wetland habitats, it is considered useful to use different sensors (imaging in a wide range of the electromagnetic spectrum) to collect diverse data in order to increase the accuracy of classification (mapping) [
20]. In this sense, multispectral and SAR data have advantages and disadvantages [
16]. Optical data provide spectral characteristics of the measured area and objects, while SAR data provide information on the structure of vegetation, soil moisture, and flooded vegetation [
33]. Since each sensor measures different characteristics, it is expected that the integration of optical and SAR data will increase classification accuracy in wetland mapping [
16,
20].
Thus, SAR systems provide the possibility of continuous data collection, regardless of weather conditions and lighting, which allows the rapid mapping of changes in the environment [
31]. In the literature [
34,
35], the process of creating a map in a short period is colloquially called “fast mapping”. According to Copernicus Emergency Management Services [
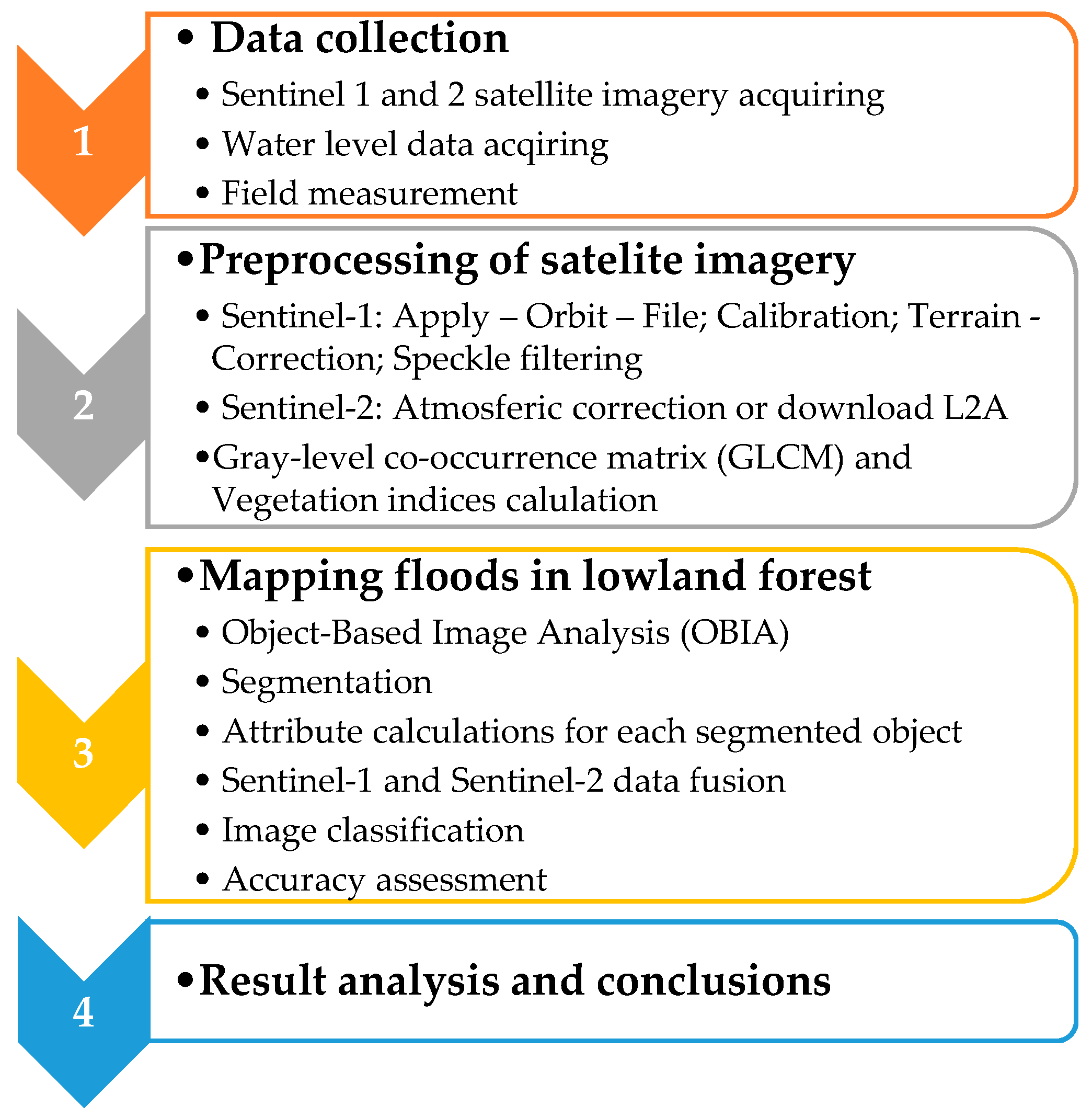
36], the process is deemed fast when a map is created in less than 12 h from data acquisition to the production of the final product (so-called delineation and grading products). Therefore, the main purpose of this paper is to develop and apply a methodological framework of satisfactory accuracy and acceptable cost and time (speed) for monitoring and mapping of floods in lowland forests using Sentinel-1 (S1) and Sentinel-2 (S2) images.
In the realization of the goal, by integrating S1 and S2 data, we attempted to use the advantages (data and information) of each sensor and increase the accuracy of classification by fusion, a synergy effect. On the other hand, it is necessary to accept, as stated in the review paper [
37], that vegetation in the low/moderate stage of growth is mainly considered separately in relation to high vegetation (e.g., forest) due to the different effects of vegetation structure and density on SAR signal intensities. Furthermore, the interpretation of the feedback SAR signal from different objects in the conditions of the existence or absence of flooding continues to be a research challenge [
7,
32]. Therefore, this paper selects and analyzes the environmentally diverse research area (grasslands, bushwood, agricultural land, and forests of different types and stages) to assess the applicability of Sentinel-1 (S1) and Sentinel-2 (S2) imagery in flood mapping in more complex (heterogeneous) environmental conditions.
3. Results
The results refer to the visual and digital interpretation of VV and VH data and color composites, the interpretation of statistical indicators of accuracy, and the classification map presentation (Level 5).
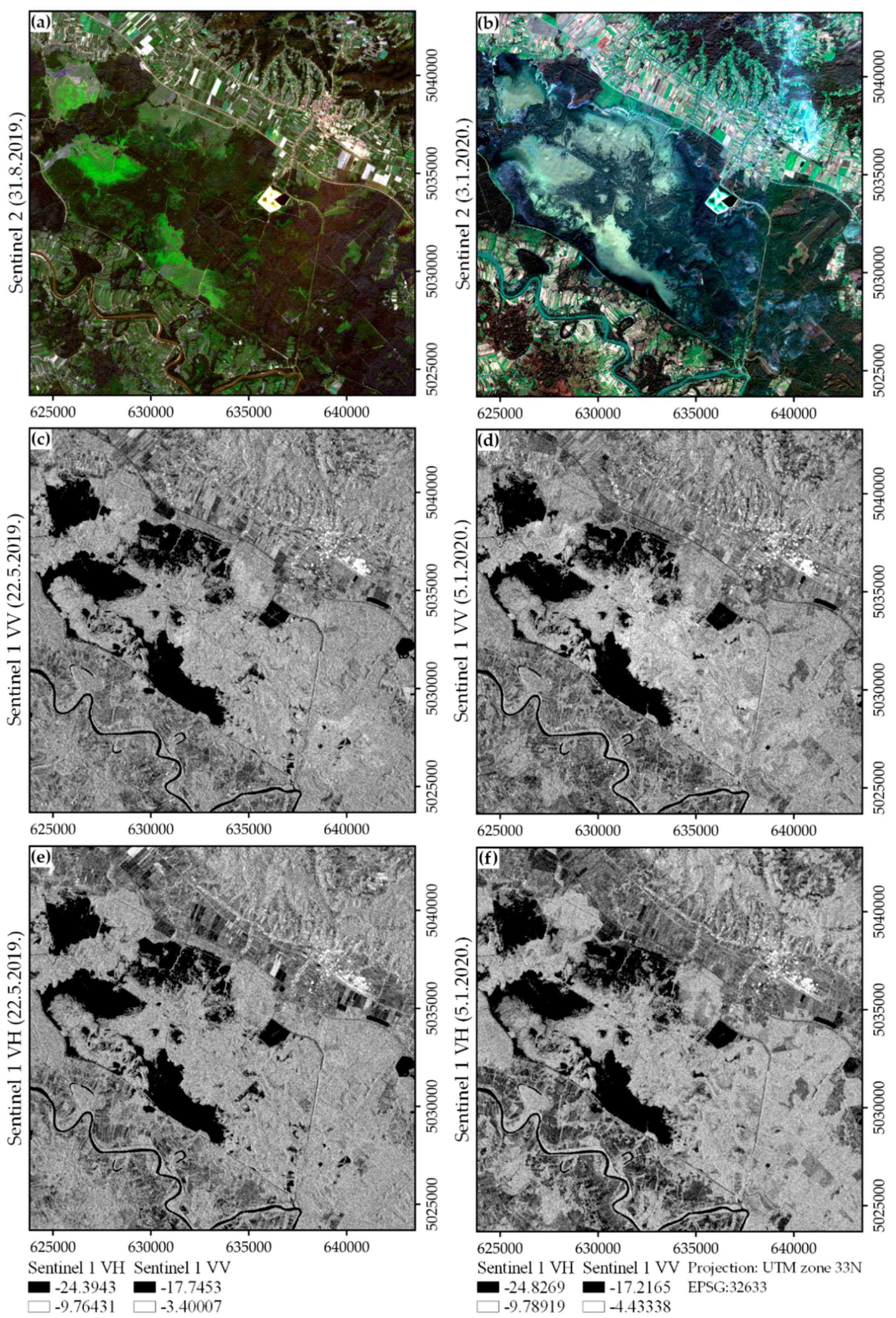
Visual interpretation and comparison of VV and VH imagery from two different periods show the identification of open water surfaces reflected in dark colors in both periods (
Figure 8), which was to be expected given the introductory theory of SAR technology and cited literature [
23,
27,
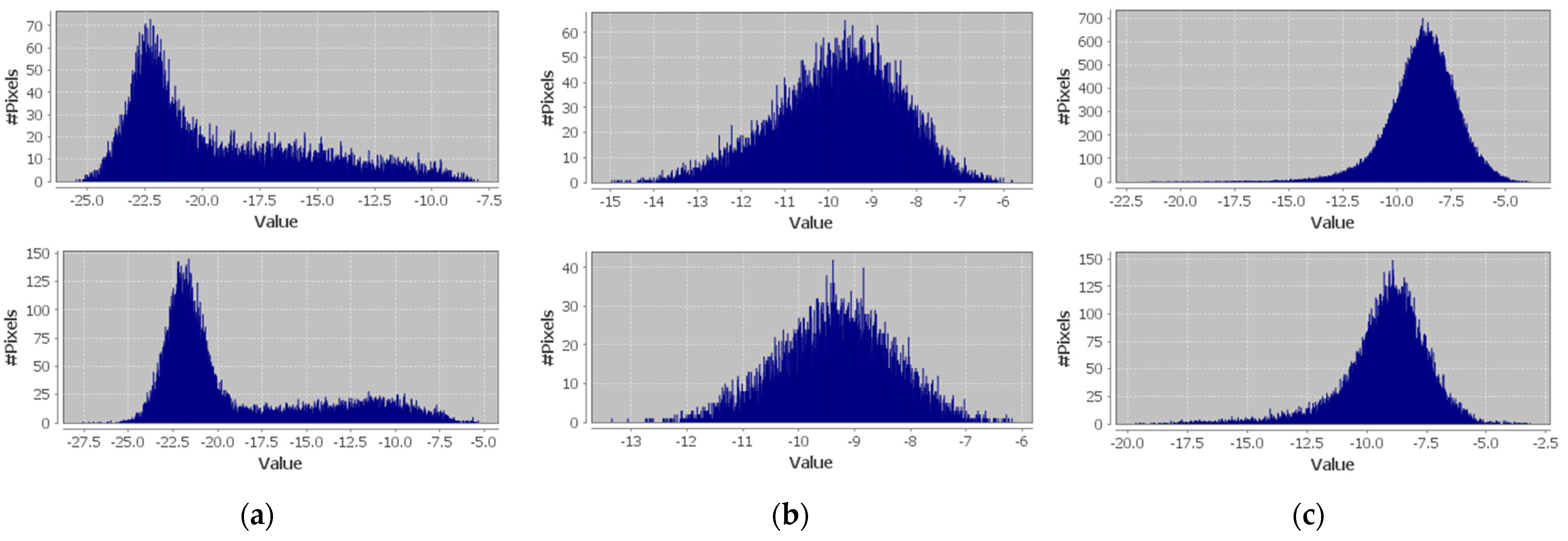
38]. In the winter period, the identification of open floods and flooded and non-flooded forest areas was enabled and implemented by interpreting the VV imagery. Open floods are shown in dark (black) colors and are easily identified, while flooded forests are reflected in the light and light grey tones depending on the structure of the forest. Darker grey values refer to non-flooded lowland forests. Examples of VV histograms (shown in decibels) for the main three classes (open water, flooded forest, and non-flooded forest) during the winter flood are shown in
Figure 9.
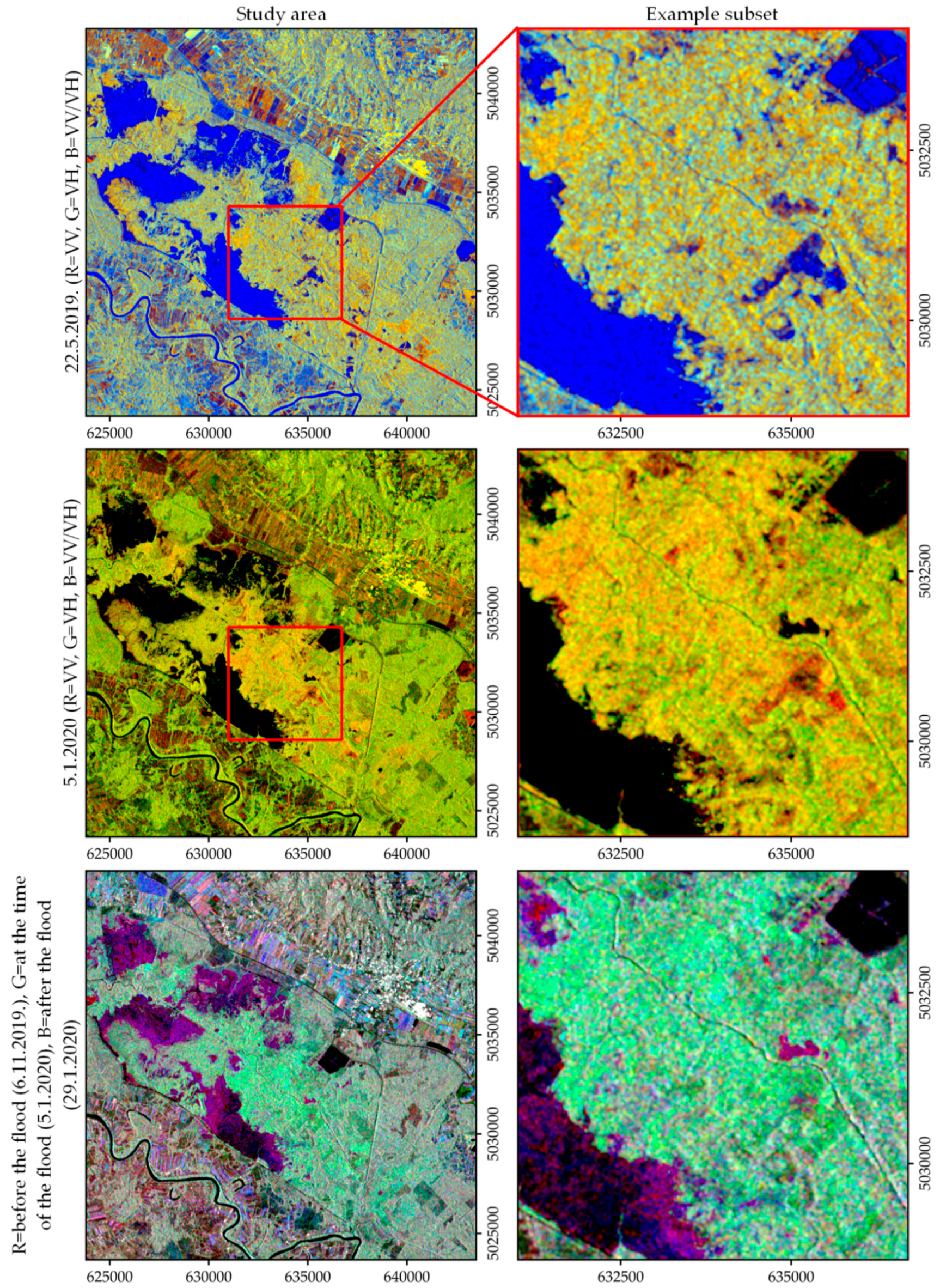
Color composites—one multi-polarizing during the spring flood and two multi-polarizing and temporal during the winter flood—are shown in
Figure 10. By applying this digital image analysis technique, the obtained color composites become functional in the interpretation of flooded areas. The possibility of visually identifying the extent of floods and the detection of open waters and flooded and non-flooded forest areas for both vegetation periods was improved.
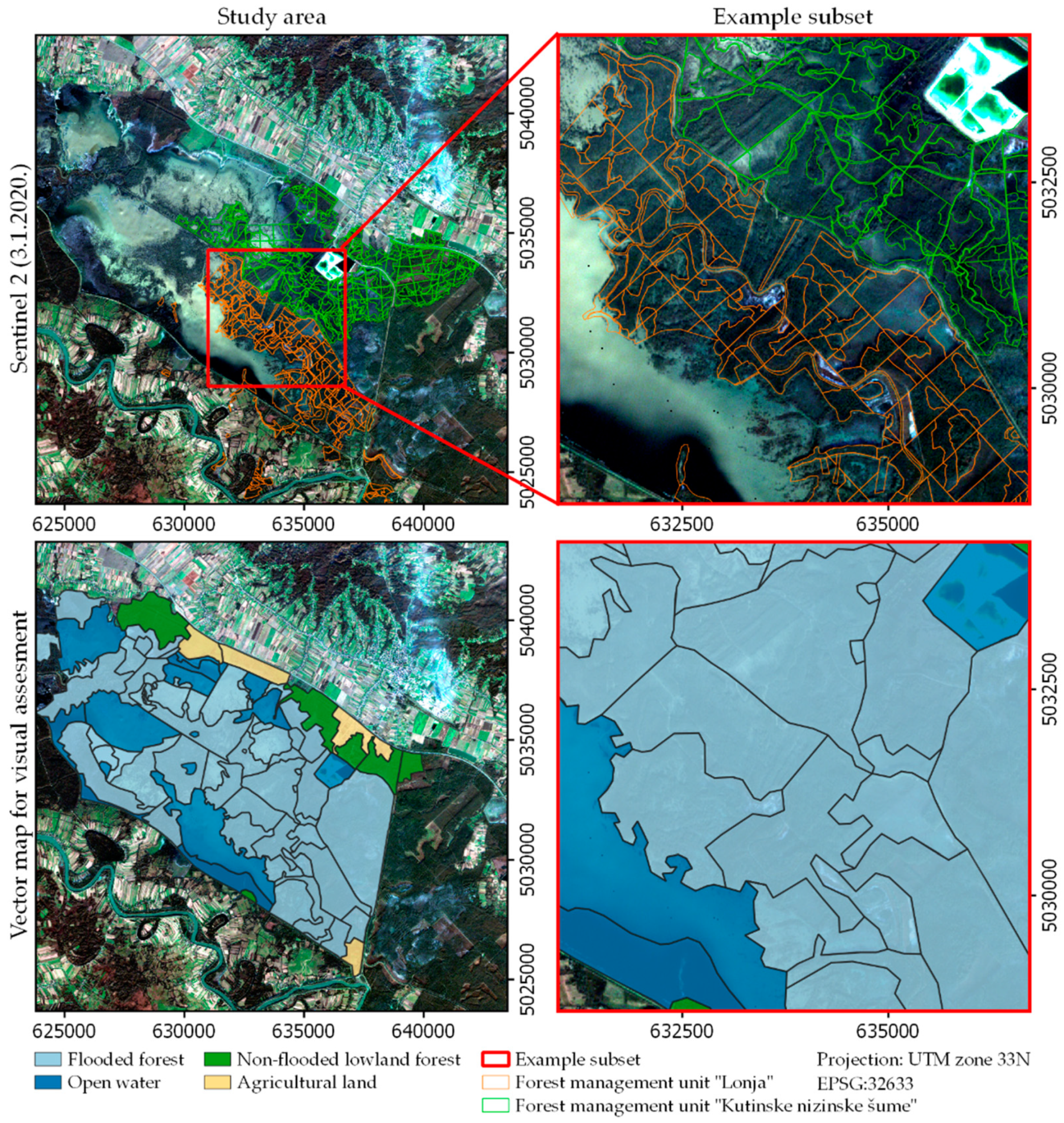
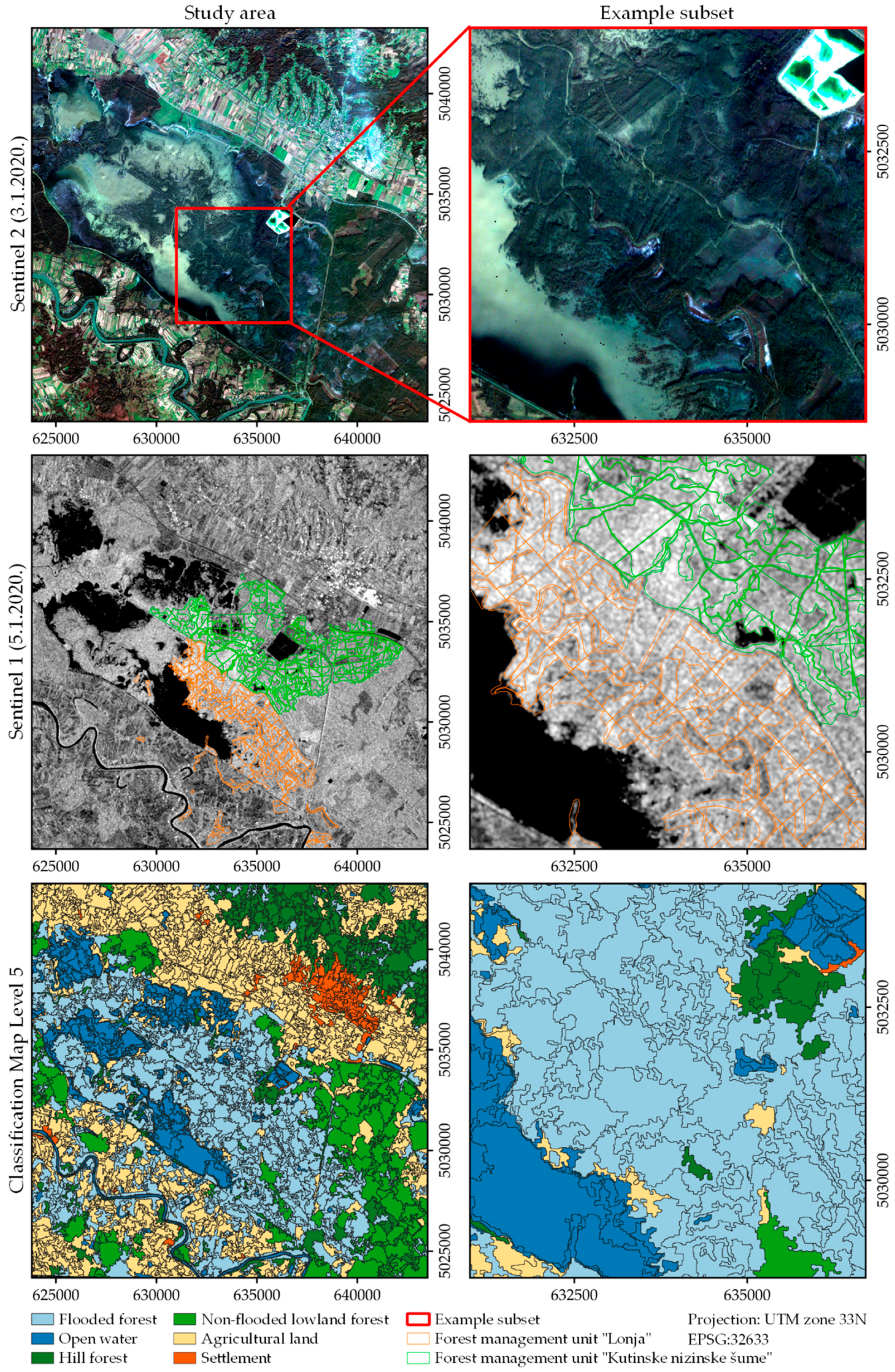
Figure 11 shows the final product—the floodplain classification map (Level 5). Visual inspection and a comparison with the S2 imagery (3 January 2020) show a high correlation between the classification map and manual vectorization (
Figure 7). Moreover, the congruence with the color composites is evident (
Figure 10).
Based on the classification results, a positive trend in the values of static accuracy indicators can be seen (
Table 9). The highest values of OA (94.94) and kappa coefficient (0.94) were determined for Level 5. By introducing additional features in the classification process, i.e., by merging SAR and optical data, the OBIA property is useful, which indicates that the improvement of classification results [
15] is also confirmed by the subject paper.
Table 10 shows the total statistical classification indicators and the confusion matrix for Level 5. The values of the producer’s accuracy, user’s accuracy, and the kappa coefficient within a particular class indicate a high agreement between classified and reference data (
Table 10). It should be noted that the visual inspection [
93,
96] of the classification map determined that there are smaller additional areas (polygons) that are not included in the statistical analysis and that are incorrectly classified. These are boundary polygons between two classes, such as misclassification of unstocked timberland with agricultural land, misclassification of non-flooded lowland forests with hill forests, or misclassification of smaller settlements (which are not the whole polygon) with agricultural land.
Optical imagery (and the associated analysis) is limited in distinguishing individual polygons (classes) by the similarity of their spectral reflection [
13,
97,
98]. In SAR data, individual polygons do not differ in backscattering components to the extent that would result in class separation [
28]. These small classification glitches are eliminated as needed in the process of post-editing and improving the classification map by applying software capabilities (PCI Geomatica Banff, PCI Geomatics, Ontario, Canada) and using additional information (GIS layers).
4. Discussion
For operational reasons, it is considered useful to single out two practical recommendations here. First, in operational situations, regional flood monitoring in forests is carried out using available SAR sensors or missions that cover the area of interest [
38]. Second, in the analysis and assessment of the applicability of SAR C bands in the detection of floods in the forest (under the forest canopy), the fact that continuously overgrown forest areas are in fact not infrequently heterogeneous should be taken into account. This implies that despite the uniform composition of tree species as well as similar orientation, size, and leaf shape, the spatial diversity (variation) in the basal area, number of trees, and height of trees can be significant factors in enabling flood detection in forests [
43].
In line with the first recommendation, S1 data (and data from other Sentinel missions) are free and available to all citizens and organizations worldwide, without any restrictions on the distribution, processing, and exchange of data [
96,
99]. These qualities made this sensor, among other purposes, available for the monitoring and mapping of natural disasters, which was conducted in this study on the example of flood mapping in the area of lowland forests. With regard to the second recommendation, the heterogeneity within a single stand and primarily between stands and stand structural elements (mixture ratio, spatial distribution and number of trees, basal area, volume, diameters, degree of canopy cover, age, etc.), in this case, can be considered a significant and decisive factor in flood detection. Therefore, in monitoring and mapping floods in the forest area with the benefits of SAR and optical satellite imagery, it is useful and almost necessary to have GIS information (
Section 2.3.5.), which was confirmed by this study. According to the possibilities, the recommendation is to develop a continuous model of spatial variation (a so-called spatial distribution map) on the condition and structural elements of stands [
100], which further improves the ability to detect and monitor floods and interpret the backscatter.
Greyscale imagery commonly represents the backscattering of SAR interaction with surface. Dark tones refer to weaker backscatter and light tones refer to high backscatter [
11,
101]. Due to the observation of the Earth’s surface at a certain angle from the nadir (side-looking radar) and the effect of specular reflection in open and calm water surfaces, radar radiation is reflected in the direction away from the sensor, and the backscatter is low or non-existent [
15,
26]. Therefore, open water surfaces are displayed in dark values and are easy to distinguish from non-flooded surfaces by visual interpretation or the application of simple threshold methods [
45], which was confirmed by this study. The histogram of open water surfaces is shown in
Figure 9a.
For non-flooded lowland forests, the tonality of imagery, the form and distribution of the histogram data are between the tonality of the imagery and the data for open water surfaces and flooded forests. It is evident that there is an overlapping space between the histograms of flooded and non-flooded forests (
Figure 9). The overlap area is explained by the fact that the soil in the surrounding non-flooded forests is significantly soaked with water, which increases the backscatter due to the increase in the soil dielectric constant, thus reducing the differentiation of flooded forests from non-flooded forests [
30,
45].
Flooded forests are not reliably distinguished by visual (there are no noticeable differences in the grey value) interpretation of the scene with leaves (leaf-on period during the spring flood), which is especially true for the VH imagery. In the winter period, the identification of open floods and flooded and non-flooded forest areas is enabled by visual interpretation, analysis of the VV imagery, and, to a lesser extent, by the analysis of VH data. For this reason, segmentation was applied to VV data.
The histograms of flooded forests refer to forests of normal (above 0.80) and infrequently less than normal (0.50 to 0.80) density, I. and II. site quality, respectively. In general, these are medium-dense to denser stands with tall trees of good quality and long trunks and a multi-meter (>5 m) range from the water surface to the bottom of the canopy (first branches) (
Figure 5). The density of canopies is incomplete and sparse. The form and distribution of histogram data correspond to the brightest imagery. Thus, the light tones of flooded forests in SAR imagery are the result of the previously described condition (conditio sine qua non) that was achieved, which is the appearance of a rectangular reflection between the water surface and the trunks in the forest [
13,
19,
42].
In order to increase the quality of the input data (in case of unsatisfactory accuracy), additional data were added to the polygons created in the segmentation process or at different levels of analysis [
15]. Here again, the addition (Level 2) and the fusion process of S1 and S2 (Level 3, 4, and 5) data increased the accuracy of the classification (
Table 9), which is consistent with previous research by [
20,
21,
44,
58].
The overall accuracy of the classification is 94.9. In accordance with scientific practice in previous research [
90], the accuracy should be compared with the average of previous studies of OBIA application in the wetland classification, which, according to [
44], is 84.6%. The kappa classification coefficient is 0.94. Kappa coefficient values are considered to be between 0.41 and 0.60 for moderate accuracy in classification, 0.61 and 0.8 for high accuracy, and greater than 0.80 for very high classification accuracy [
102]. With regard to the three classes (A, B, and C) that are the focus of the paper (
Table 10), the complete statistical accuracy for the open water classes (B) is evident. For the class of the flooded forest (A), the indicators of user accuracy and producer accuracy are 0.9 and 1.0, respectively. For the class of non-flooded lowland forest, the indicators of user accuracy and producer accuracy are 1.0 and 0.9, respectively. Considering the statistical results of the classification and comparable reference indicators, very high accuracy of classification was achieved.
One of the main advantages of OBIA over pixel-based methods is that, in addition to the use of spectral signature, it allows the inclusion of geometric, textural, and contextual features (attributes) of an object [
14,
63,
103]. According to [
44], of these features, spectral signature and their derivatives (e.g., vegetation indices) are commonly used in optical and SAR sensors and are considered more significant than non-spectral attributes in flooded forest mapping procedures and other types of wetlands. Among non-spectral features, the actual contribution of textural measures is still not sufficiently elucidated, while geometric features are least commonly used in OBIA wetland habitats. The previously described [
44] significance (influences) of individual attributes on the classification result is considered acceptable in part related to spectral and geometric attributes, in this study, adding textural attributes to objects improved the classification result (Level 3). Namely, texture measures calculated on first-order histogram data (statistical measures) have drawbacks because they do not provide information on the relative relationship between pixels [
104] and are therefore limited in application to more complex problems [
105]. Of course, second-order histogram texture features can be used to overcome some of these limitations, and they have been successfully used in the segmentation and classification of different aerial and satellite imagery [
106]. The paper did not aim to determine the significance of individual input elements (attributes) on the classification results. In this regard, it should be noted that the shortcoming of SVM is the lack of interpretability of the model in terms of inference with the input variables [
107].
According to review papers on the application of OBIA [
44] and SAR data [
18,
32,
37,
38,
42], as well as the mentioned research papers on the monitoring and mapping of floods under the forest canopy, it is clear that the use of SAR bands of longer wavelengths is more useful. The reason for this is the signal capacity of the longer wavelength (L and P bands) to penetrate the vegetation canopy, especially in dense forest areas [
15,
17]. The possibility of penetration is more significant when the wavelength of the signal is longer than the size of the leaf [
13]. Additionally, in mapping flooded forest areas, the best results are achieved using HH polarization [
40,
41,
46] and a steep inclination angle [
42,
50]. In this regard, [
29], comparing three SAR sensors (L, C, and X bands), we suggest that the use of the C band (Envisat ASAR) in forest flood detection is a good compromise between the ALOS PALSAR L band (detects flooding under dense forest canopy but less so in open water surfaces) and TerraSAR-X band (low forest penetration capacity but high spatial resolution). Therefore, while the general assessment of the usefulness of individual SAR sensors in flood mapping is not easy to conduct, their mutual competitiveness should be considered.
By creating multi-polarization and temporal color composites (
Figure 10), the visual interpretation of VV and VH imagery in both time periods—spring with leaves (leaf-on) and winter without leaves (leaf-off)—is improved (differences are more noticeable). Similar findings were reported by [
30], who state that the false-color images created from multi-date ERS1 SAR can aid in the discrimination of different wetland communities as well as by [
29] using an RGB composite of three different SAR sensors in the visual interpretation and analysis of forest flood detection.
Regarding the time of making a flood map, it is important to point out that it depends on computer performance, applied software solutions in image preprocessing and object analysis, and specific knowledge and skills of the operator. Namely, OBIA achieves better results, but the application requires specialist software and user knowledge [
108]. Moreover, the knowledge and skills of the operator in the interpretation and analysis (visual and digital) of SAR (primarily) and optical images, as well as knowledge of the characteristics and condition of the observed environment, are necessary [
37,
109]. The time required to produce a reliable flood map and to interpret results for similar environmental conditions in less than 12 h must be considered in addition to meeting the above requests. Accordingly, the procedure applied is considered fast.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}