Forest Height and Underlying Topography Inversion Using Polarimetric SAR Tomography Based on SKP Decomposition and Maximum Likelihood Estimation



Abstract
:1. Introduction
2. Methodology
2.1. TomoSAR Imaging Model
2.2. IMLE TomoSAR Method
2.3. SKP Decomposition
2.4. SKP-IMLE Pol-TomoSAR Estimator
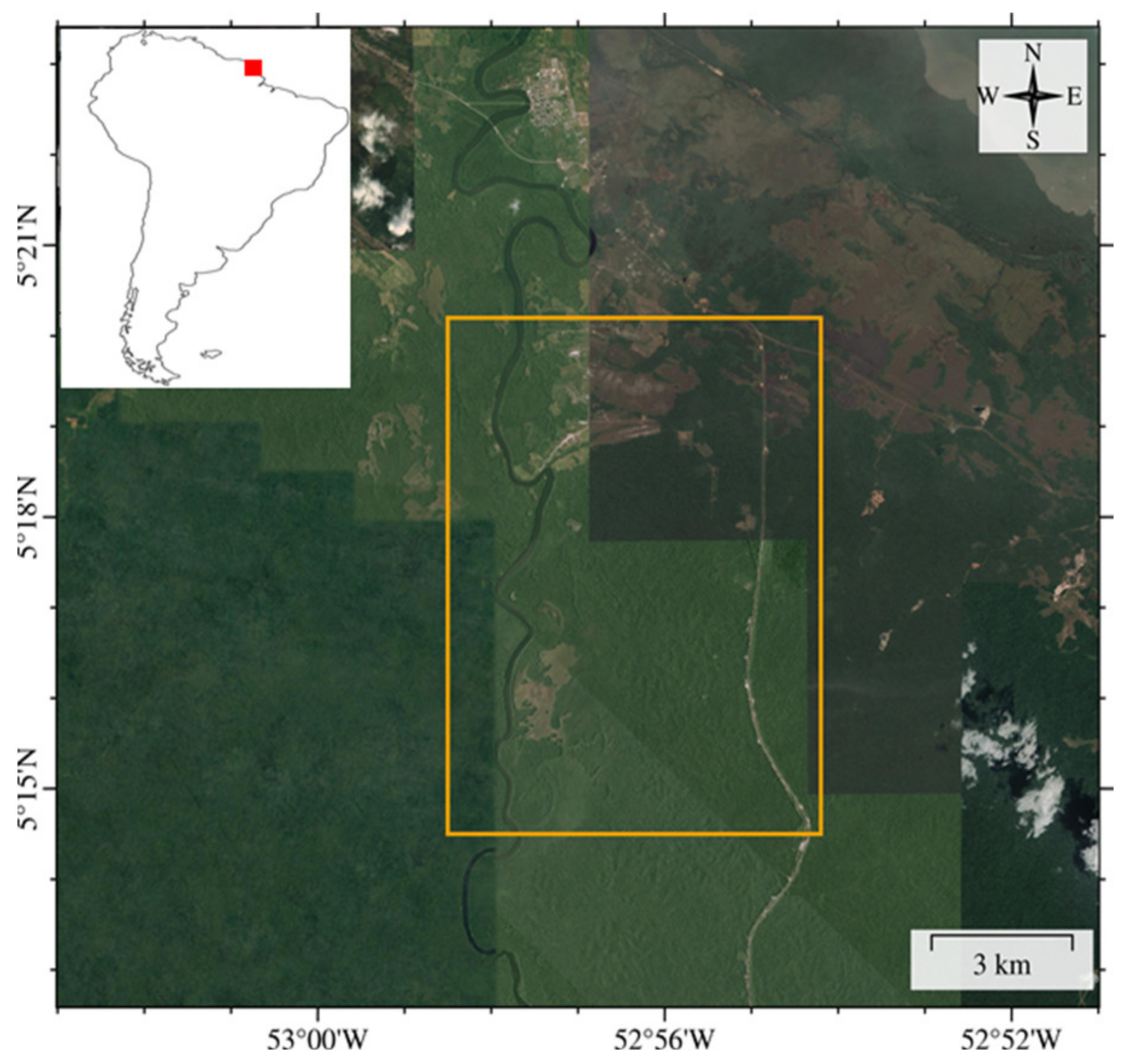
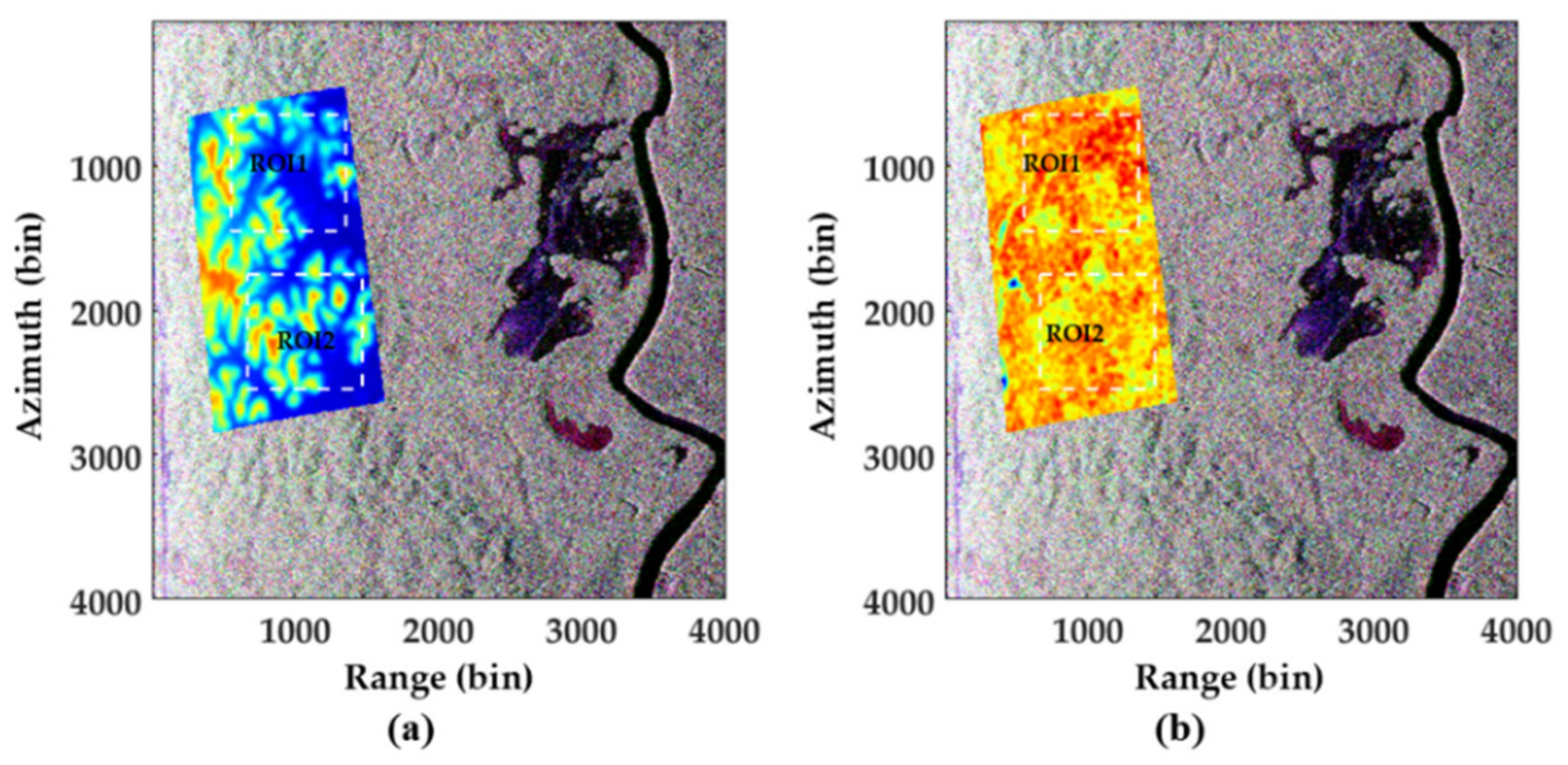
3. Study Area and Dataset
4. Results
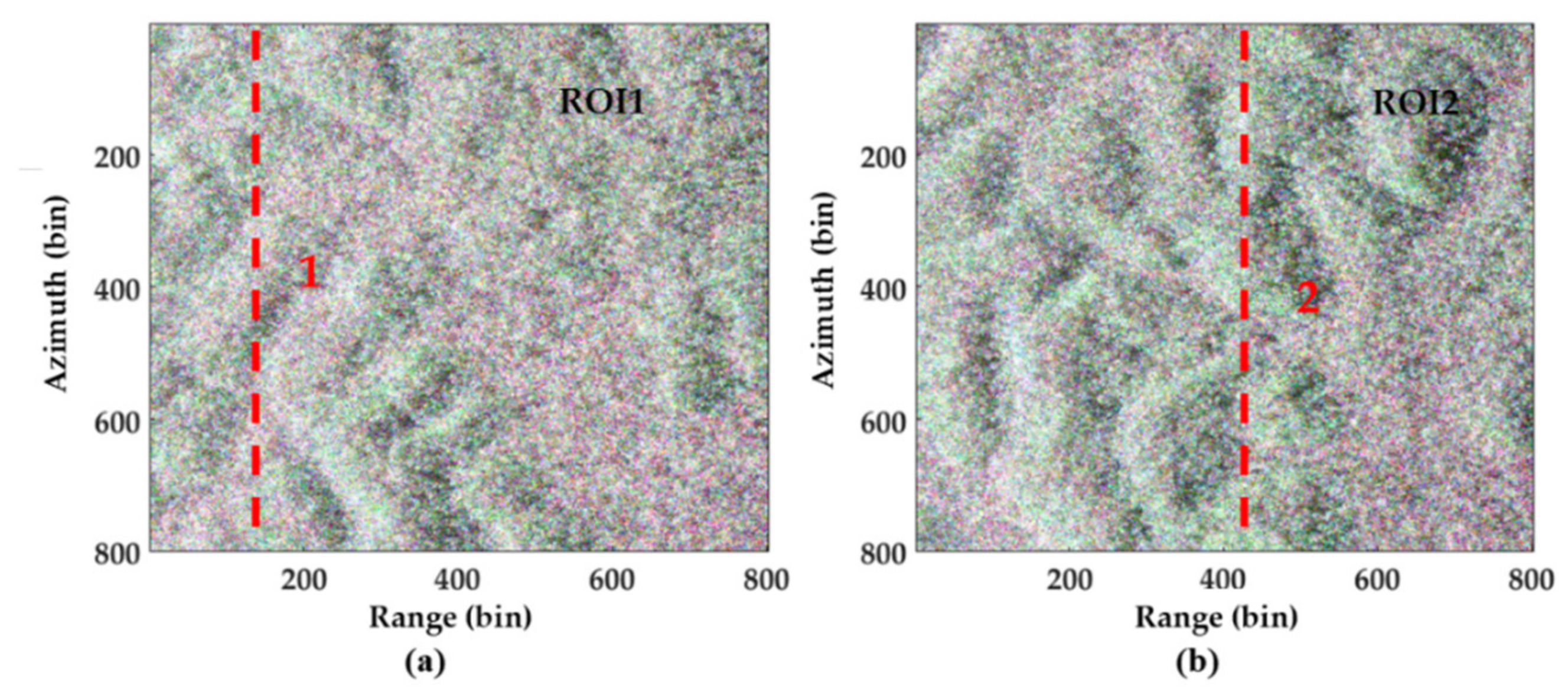
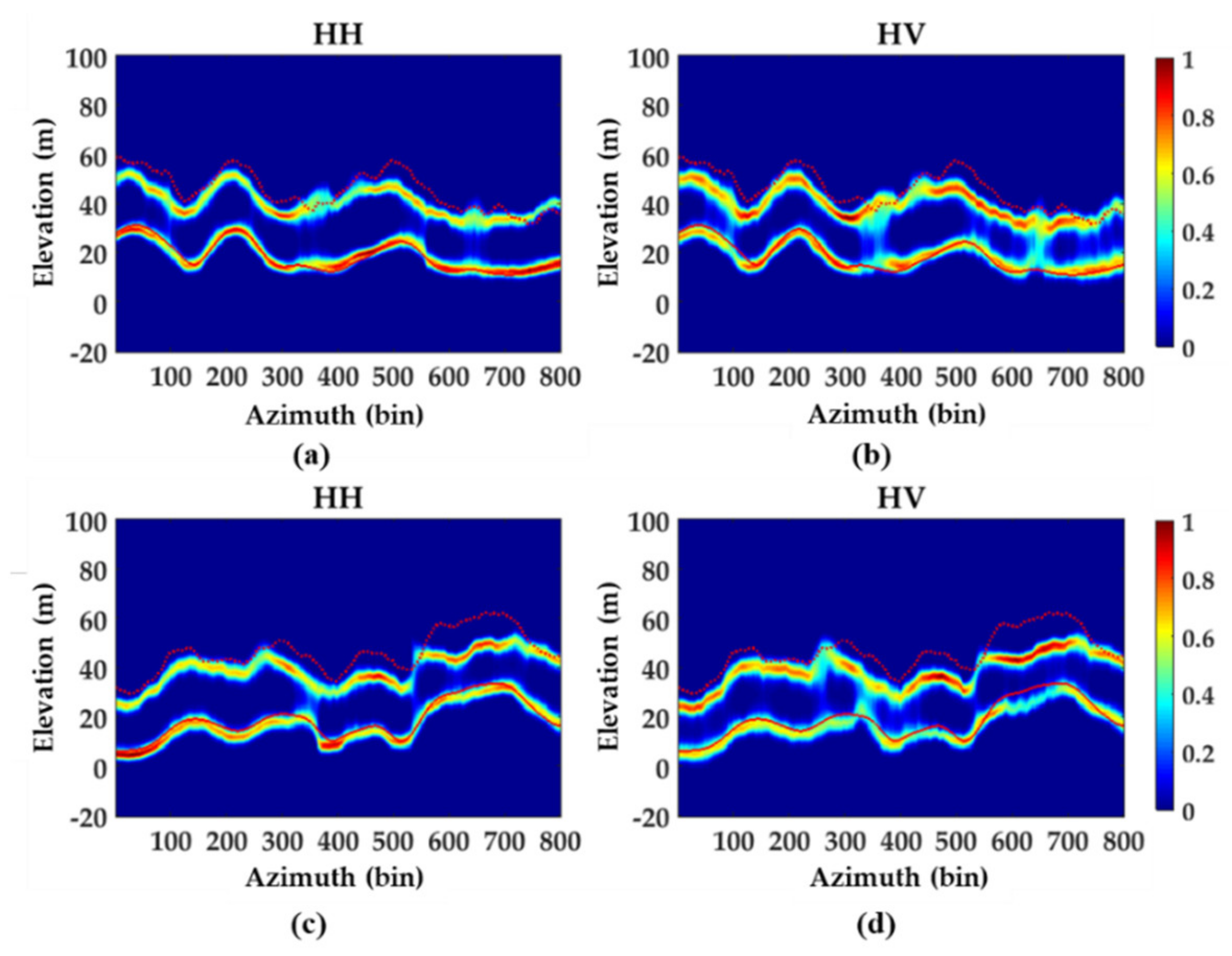
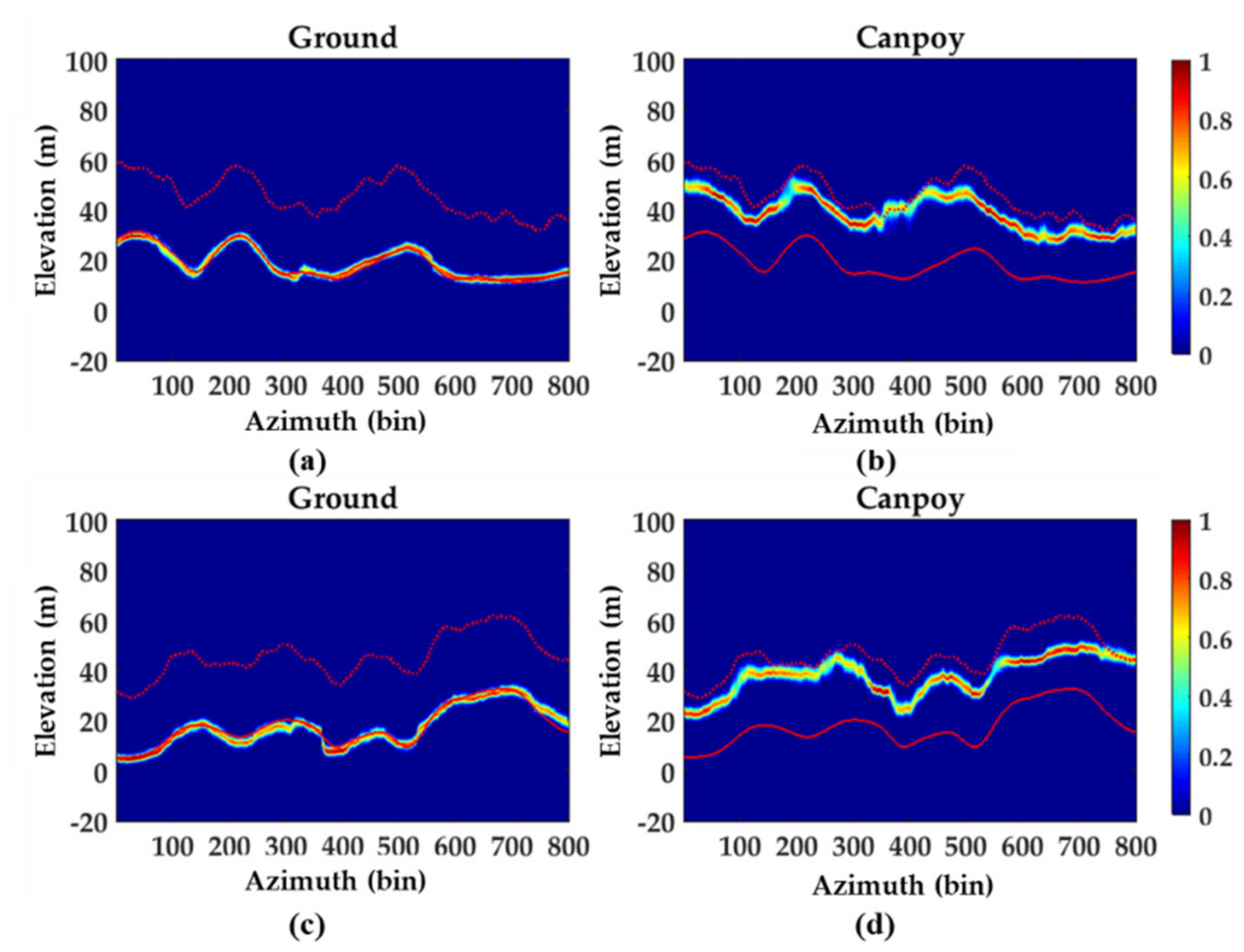
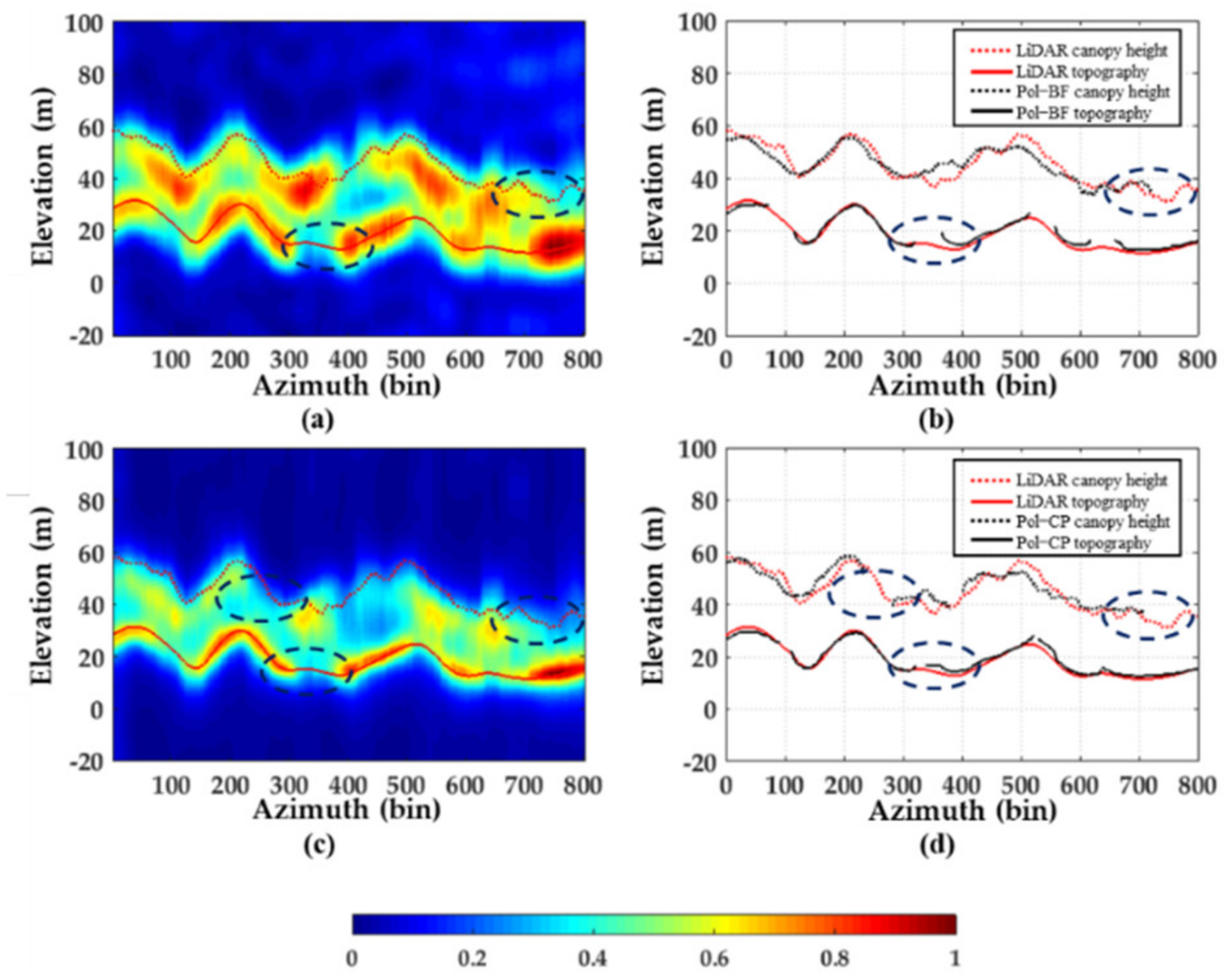
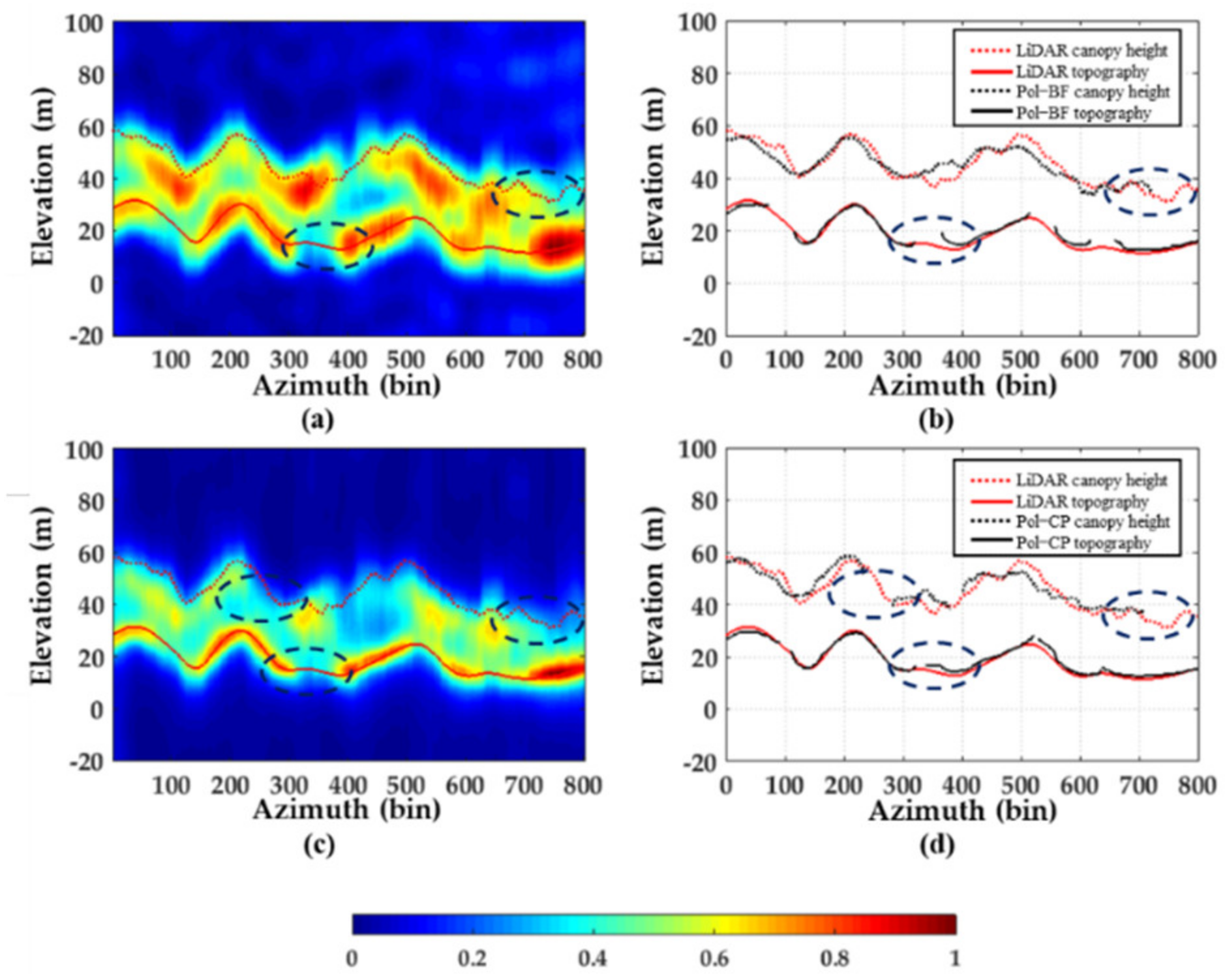
4.1. Tomograms of the Selected Azimuth Profiles
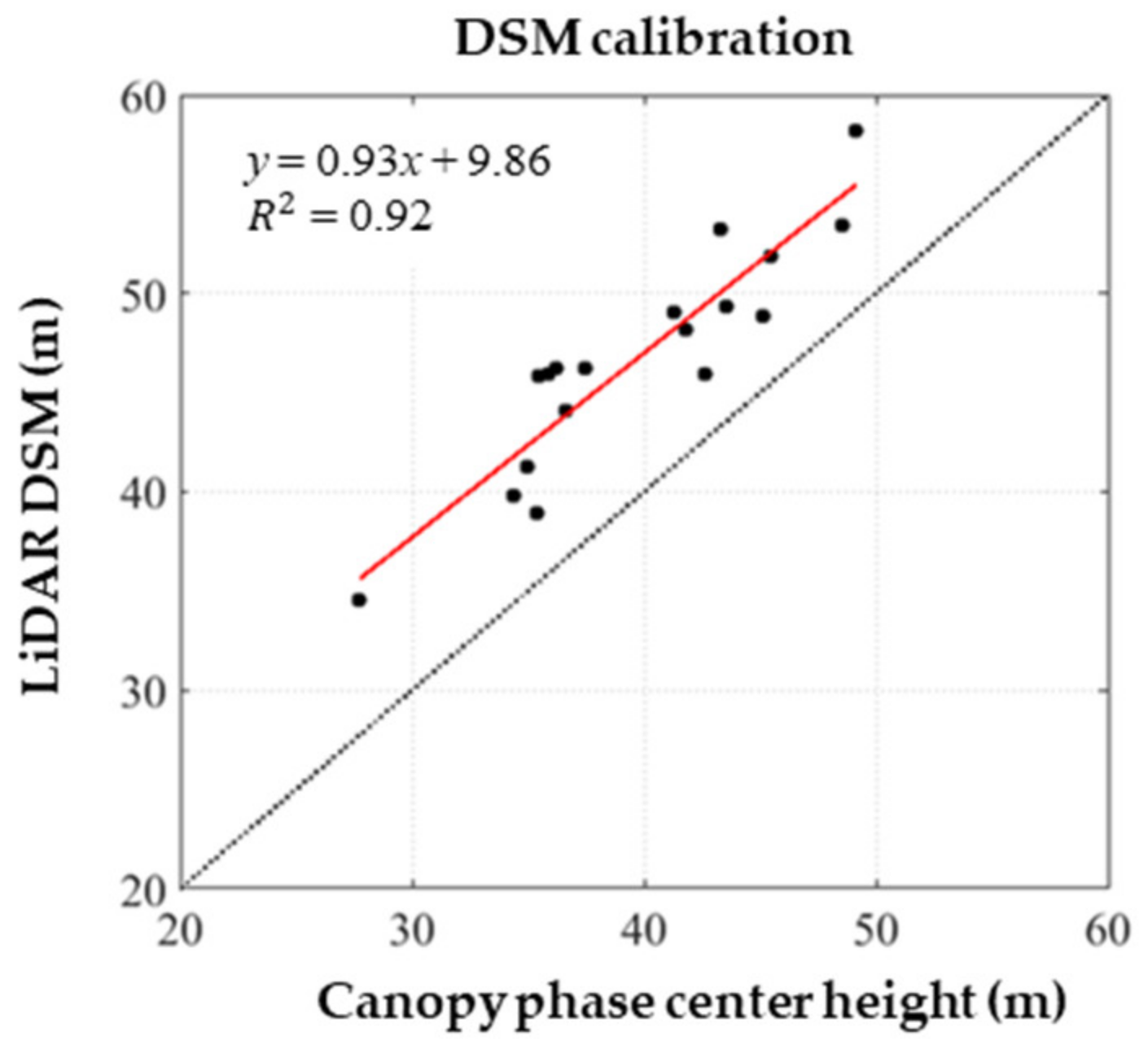
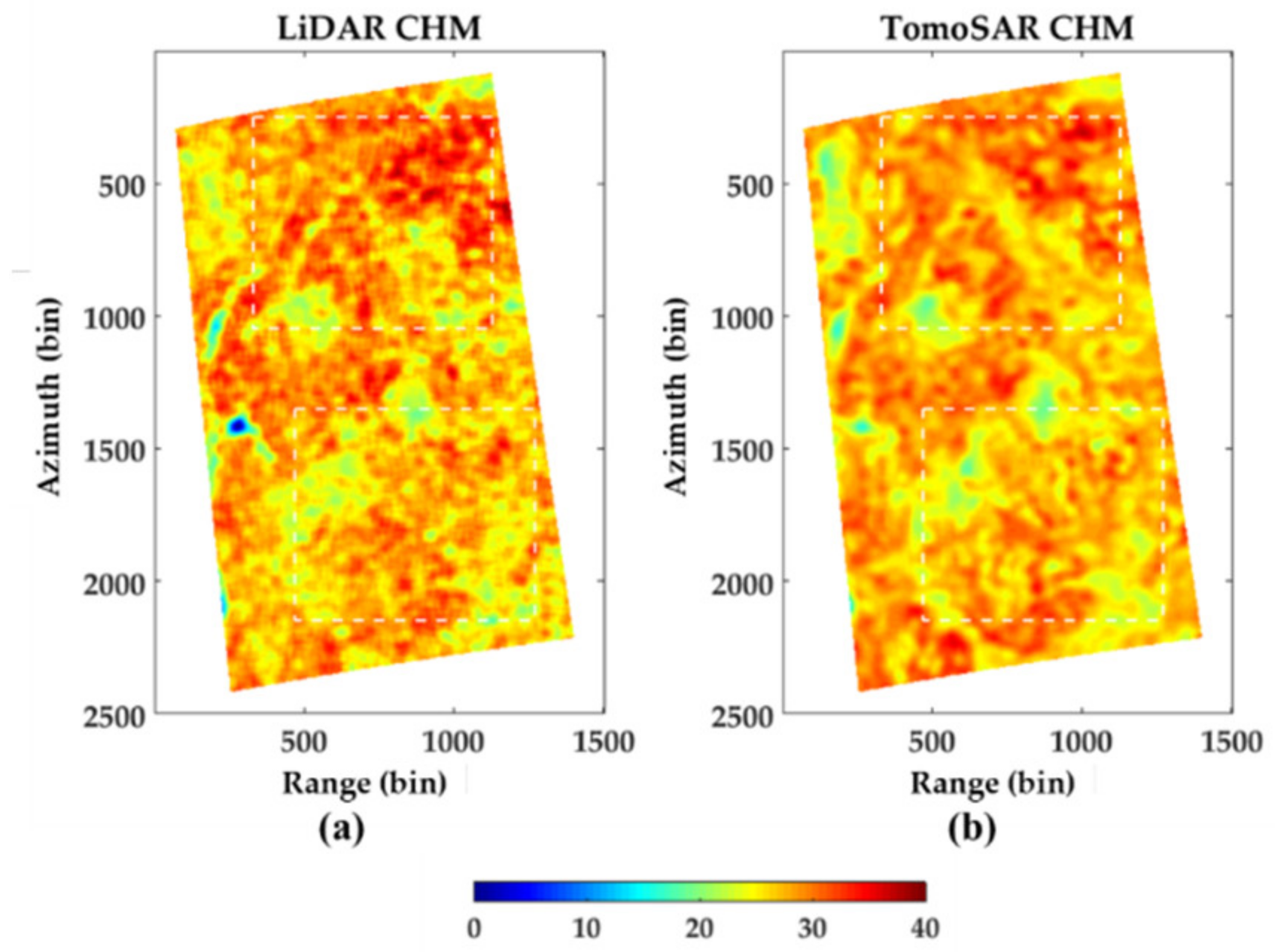
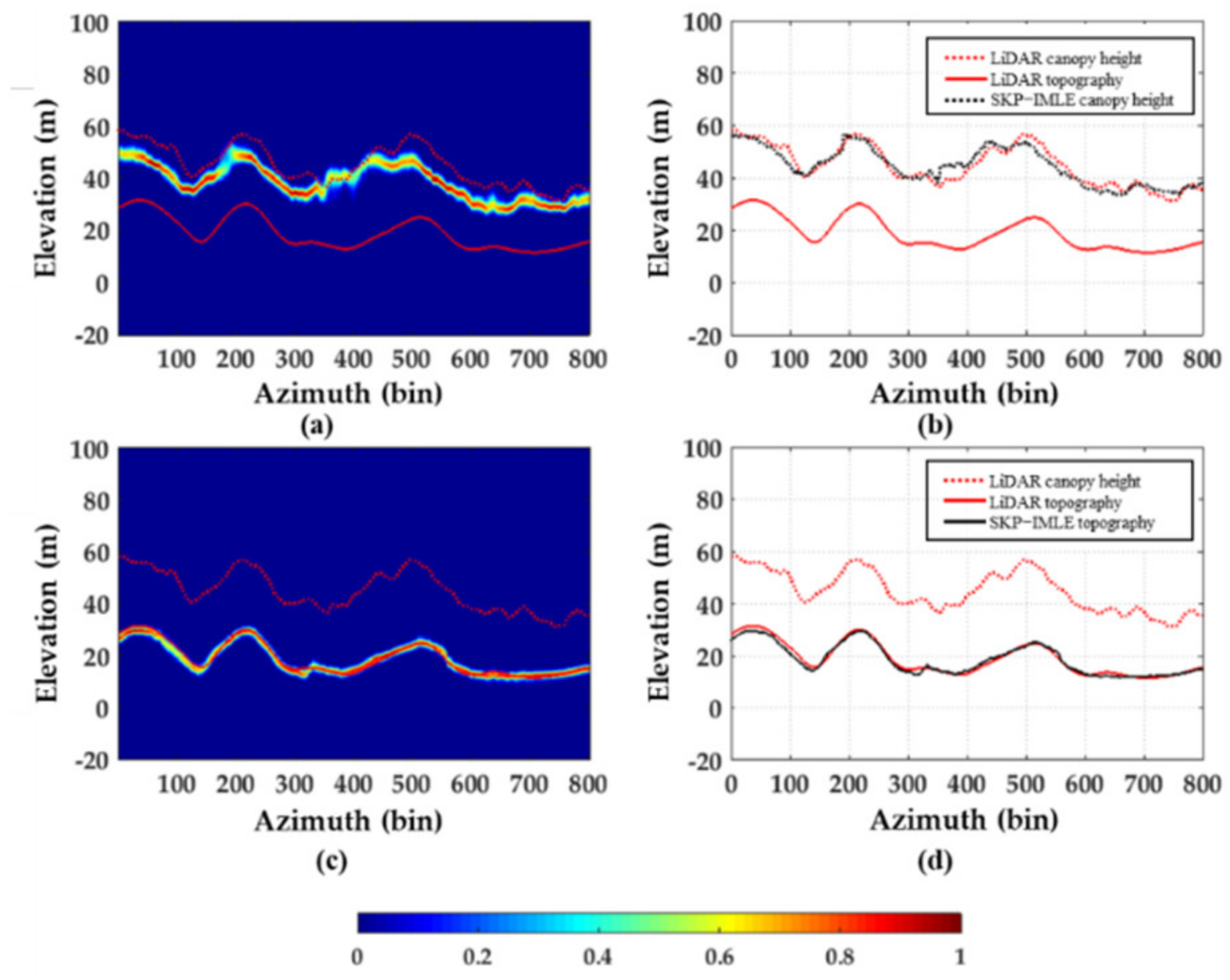
4.2. Forest Height and Underlying Topography Inversion
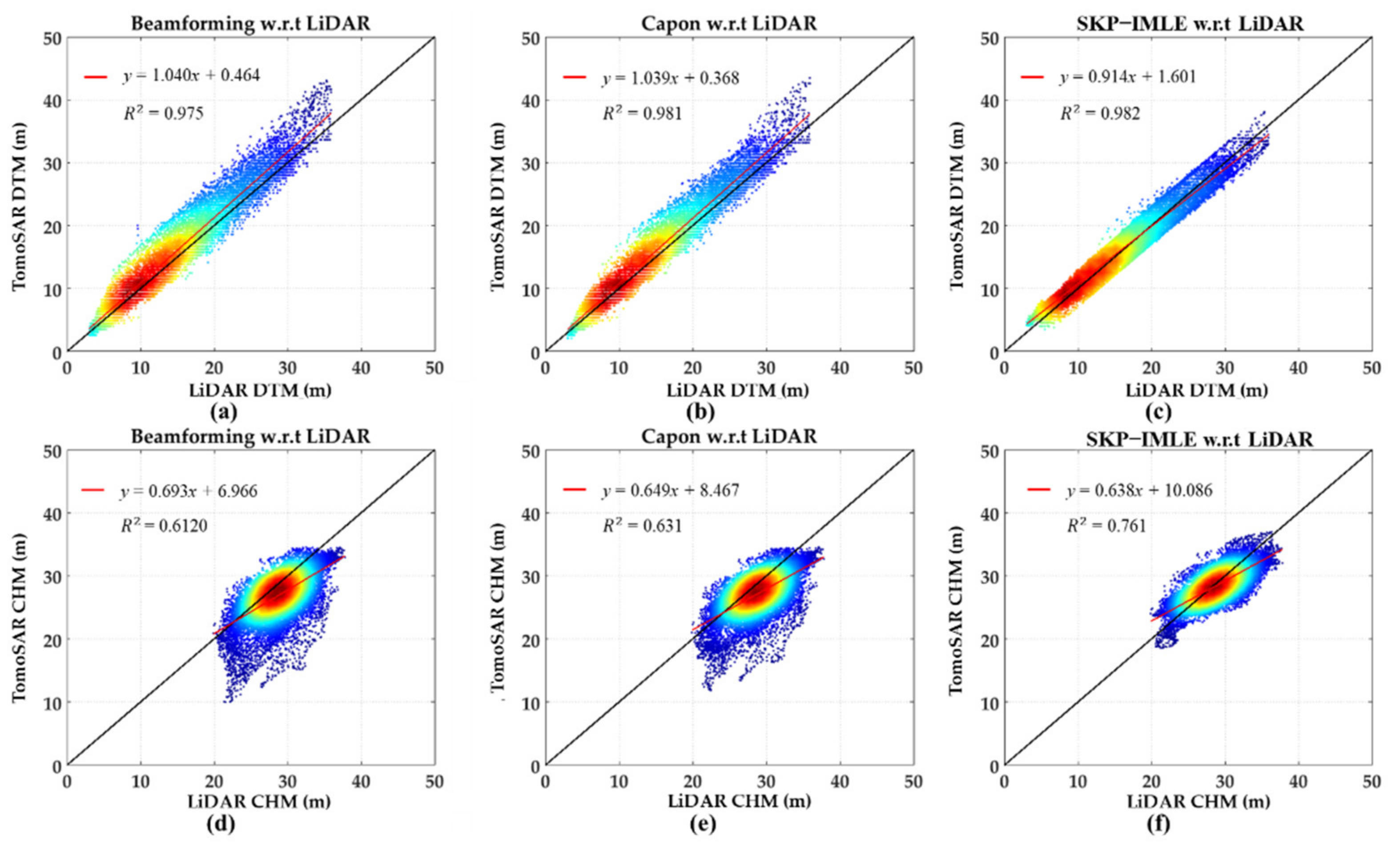
4.3. Comparison Experiments
5. Discussion
6. Conclusions
- (1)
- The SKP-IMLE method has a high vertical resolution, so it can clearly distinguish the scatterers with different scattering mechanisms and achieve high focus of canopy scattering and ground scattering, which is very beneficial for forest height and underlying topography extraction. However, the traditional TomoSAR methods (such as beamforming and Capon) have limited resolution, and there is no guarantee that the vertical profile generates two clear and separate peaks for all resolution cells. These shortcomings make the extraction of forest height and underlying topography using traditional spectral analysis methods prone to errors.
- (2)
- The proposed SKP-IMLE method can obtain good forest height and underlying topography inversion results in tropical forests. With respect to LiDAR measurements, the SKP-IMLE method achieved high inversion accuracy in the two regions of interest.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Colliander, A.; Narhi, T.; de Maagt, P. Modeling and Analysis of Polarimetric Synthetic Aperture Interferometric Radiometers Using Noise Waves. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3560–3570. [Google Scholar] [CrossRef]
- Lopez-Martinez, C.; Papathanassiou, K. Cancellation of Scattering Mechanisms in Polinsar: Application to Underlying Topography Estimation. IEEE Trans. Geosci. Remote Sens. 2013, 51, 953–965. [Google Scholar] [CrossRef]
- Neumann, M.; Ferro-Famil, L.; Reigber, A. Estimation of Forest Structure; Ground; and Canopy Layer Characteristics from Multibaseline Polarimetric Interferometric Sar Data. IEEE Trans. Geosci. Remote Sens. 2010, 48, 1086–1104. [Google Scholar] [CrossRef] [Green Version]
- Cloude, S.; Papathanassiou, K. Three-Stage Inversion Process for Polarimetric Sar Interferometry. IEE Proc.-Radar Sonar Navig. 2003, 150, 125–134. [Google Scholar] [CrossRef] [Green Version]
- Papathanassiou, K.; Cloude, S. Single-Baseline Polarimetric Sar Interferometry. IEEE Trans. Geosci. Remote Sens. 2001, 39, 2352–2363. [Google Scholar] [CrossRef] [Green Version]
- Reigber, A.; Moreira, A. First Demonstration of Airborne Sar Tomography Using Multibaseline L-Band Data. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2142–2152. [Google Scholar] [CrossRef]
- Cazcarra-Bes, V.; Tello-Alonso, M.; Fischer, R.; Heym, M.; Papathanassiou, K. Monitoring of Forest Structure Dynamics by Means of L-Band Sar Tomography. Remote Sens. 2017, 9, 1229. [Google Scholar] [CrossRef] [Green Version]
- Minh, D.H.T.; Le Toan, T.; Rocca, F.; Tebaldini, S.; Villard, L.; Rejou-Mechain, M.; Phillips, O.L.; Feldpausch, T.R.; Dubois-Fernandez, P.; Scipal, K.; et al. Sar Tomography for the Retrieval of Forest Biomass and Height: Cross-Validation at Two Tropical Forest Sites in French Guiana. Remote Sens. Environ. 2016, 175, 138–147. [Google Scholar] [CrossRef] [Green Version]
- Minh, D.H.T.; Tebaldini, S.; Rocca, F.; Le Toan, T.; Villard, L.; Dubois-Fernandez, P.C. Capabilities of Biomass Tomography for Investigating Tropical Forests. IEEE Trans. Geosci. Remote Sens. 2015, 53, 965–975. [Google Scholar] [CrossRef]
- Minh, D.H.T.; Le Toan, T.; Rocca, F.; Tebaldini, S.; d’Alessandro, M.M.; Villard, L. Relating P-Band Synthetic Aperture Radar Tomography to Tropical Forest Biomass. IEEE Trans. Geosci. Remote Sens. 2014, 52, 967–979. [Google Scholar] [CrossRef]
- Peng, X.; Li, X.; Wang, C.; Fu, H.; Du, Y. A Maximum Likelihood Based Nonparametric Iterative Adaptive Method of Synthetic Aperture Radar Tomography and Its Application for Estimating Underlying Topography and Forest Height. Sensors 2018, 18, 2459. [Google Scholar] [CrossRef] [Green Version]
- Peng, X.; Li, X.; Wang, C.; Zhu, J.; Liang, L.; Fu, H.; Du, Y.; Yang, Z.; Xie, Q. Spice-Based Sar Tomography over Forest Areas Using a Small Number of P-Band Airborne F-Sar Images Characterized by Non-Uniformly Distributed Baselines. Remote Sens. 2019, 11, 975. [Google Scholar] [CrossRef] [Green Version]
- Tebaldini, S. Single and Multipolarimetric Sar Tomography of Forested Areas: A Parametric Approach. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2375–2387. [Google Scholar] [CrossRef]
- Stoica, P.; Nehorai, A. MUSIC, maximum likelihood, and Cramer–Rao bound: Further results and comparisons. IEEE Trans. Acoust. Speech Signal Process. 1990, 38, 2140–2150. [Google Scholar] [CrossRef]
- Lombardini, F.; Reigber, A. Adaptive Spectral Estimation for Multibaseline Sar Tomography with Airborne L-Band Data. Int. Geosci. Remote Sens. Symp. 2003, 3, 2014–2016. [Google Scholar]
- Cazcarra-Bes, V.; Pardini, M.; Tello, M.; Papathanassiou, K. Comparison of Tomographic Sar Reflectivity Reconstruction Algorithms for Forest Applications at L-Band. IEEE Trans. Geosci. Remote Sens. 2020, 58, 147–164. [Google Scholar] [CrossRef]
- Aguilera, E.; Nannini, M.; Reigber, A. Wavelet-Based Compressed Sensing for Sar Tomography of Forested Areas. IEEE Trans. Geosci. Remote Sens. 2013, 51, 5283–5295. [Google Scholar] [CrossRef] [Green Version]
- Donoho, D.L. Compressed Sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Li, X.; Liang, L.; Guo, H.; Huang, Y. Compressive Sensing for Multibaseline Polarimetric Sar Tomography of Forested Areas. IEEE Trans. Geosci. Remote Sens. 2016, 54, 153–166. [Google Scholar] [CrossRef]
- Zhu, X.X.; Bamler, R. Very High Resolution Spaceborne Sar Tomography in Urban Environment. IEEE Trans. Geosci. Remote Sens. 2010, 48, 4296–4308. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.X.; Bamler, R. Super-Resolution Power and Robustness of Compressive Sensing for Spectral Estimation with Application to Spaceborne Tomographic SAR. IEEE Trans. Geosci. Sens. 2012, 50, 247–258. [Google Scholar] [CrossRef]
- Martín del Campo, G.D.; Nannini, M.; Reigber, A. Statistical Regularization for Enhanced TomoSAR Imaging. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2020, 13, 1567–1589. [Google Scholar] [CrossRef]
- Martín del Campo, G.D.; Nannini, M.; Reigber, A. Towards feature enhanced SAR tomography: A maximum-likelihood inspired approach. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1730–1734. [Google Scholar] [CrossRef]
- Ferro-Famil, L.; Huang, Y.; Tebaldini, S. Polarimetric Characterization of 3-D Scenes using High-resolution and Full-Rank Polarimetric Tomographic SAR Focusing. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016. [Google Scholar]
- Huang, Y.; Ferro-Famil, L.; Reigber, A. Under-Foliage Object Imaging Using SAR Tomography and Polarimetric Spectral Estimators. IEEE Trans. Geosci. Sens. 2012, 50, 2213–2225. [Google Scholar] [CrossRef] [Green Version]
- Aguilera, E.; Nannini, M.; Reigber, A. A Data Adaptive Compressed Sensing Approach to Polarimetric SAR Tomography. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012. [Google Scholar]
- Huang, Y.; Levy-Vehel, J.; Ferro-Famil, L.; Reigber, A. Three-Dimensional Imaging of Objects Concealed Below a Forest Canopy Using Sar Tomography at L-Band and Wavelet-Based Sparse Estimation. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1454–1458. [Google Scholar] [CrossRef]
- Pardini, M.; Papathanassiou, K. On the Estimation of Ground and Volume Polarimetric Covariances in Forest Scenarios with SAR Tomography. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1860–1864. [Google Scholar] [CrossRef] [Green Version]
- Tebaldini, S. Algebraic Synthesis of Forest Scenarios from Multibaseline Polinsar Data. IEEE Trans. Geosci. Remote Sens. 2009, 47, 4132–4142. [Google Scholar] [CrossRef]
- Tebaldini, S.; Rocca, F. Multibaseline Polarimetric Sar Tomography of a Boreal Forest at P- and L-Bands. IEEE Trans. Geosci. Remote Sens. 2012, 50, 232–246. [Google Scholar] [CrossRef]
- Aghababaee, H.; Sahebi, M.R. Model-Based Target Scattering Decomposition of Polarimetric SAR Tomography. IEEE Trans. Geosci. Sens. 2018, 56, 972–983. [Google Scholar] [CrossRef]
- Tebaldini, S.; Rocca, F. On the Impact of Propagation Disturbances on SAR Tomography: Analysis and Compensation. In Proceedings of the IEEE Radar Conference, Pasadena, CA, USA, 4–8 May 2009; pp. 1–6. [Google Scholar]
- Shkvarko, Y.V. Unifying Regularization and Bayesian Estimation Methods for Enhanced Imaging with Remotely Sensed Data —Part 1: Theory. IEEE Trans. Geosci. Remote Sens. 2004, 42, 923–931. [Google Scholar] [CrossRef]
- Shkvarko, Y.V. Unifying Regularization and Bayesian Estimation Methods for Enhanced Imaging with Remotely Sensed Data —Part 2: Implementation and Performance Issues. IEEE Trans. Geosci. Remote Sens. 2004, 42, 932–940. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SKP-IMLE TomoSAR Estimator |
|---|
|
|
|
|
|
|
| System Parameters | Baseline Configuration | ||
|---|---|---|---|
| Number | Baseline Length | ||
| Wavelength | 0.7542 m | 0402 | 0 m |
| Center slant range | 4905 m | 0403 | −14.4879 m |
| Center incident angle | 35.0614° | 0404 | −30.1163 m |
| Range pixel spacing | 1.000 m | 0405 | −43.8343 m |
| Azimuth pixel spacing | 1.245 m | 0406 | −60.0632 m |
| Polarization | Fully polarized | 0407 | −74.9683 m |
| Pol-Beamforming | Pol-Capon | SKP-IMLE | ||
|---|---|---|---|---|
| ROI1 | CHM (m) | 3.390 | 3.076 | 1.997 |
| DTM (m) | 2.014 | 1.769 | 1.489 | |
| ROI2 | CHM (m) | 5.871 | 4.750 | 1.765 |
| DTM (m) | 3.076 | 2.429 | 1.786 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wan, J.; Wang, C.; Shen, P.; Hu, J.; Fu, H.; Zhu, J. Forest Height and Underlying Topography Inversion Using Polarimetric SAR Tomography Based on SKP Decomposition and Maximum Likelihood Estimation. Forests 2021, 12, 444. https://doi.org/10.3390/f12040444
Wan J, Wang C, Shen P, Hu J, Fu H, Zhu J. Forest Height and Underlying Topography Inversion Using Polarimetric SAR Tomography Based on SKP Decomposition and Maximum Likelihood Estimation. Forests. 2021; 12(4):444. https://doi.org/10.3390/f12040444
Chicago/Turabian StyleWan, Jie, Changcheng Wang, Peng Shen, Jun Hu, Haiqiang Fu, and Jianjun Zhu. 2021. "Forest Height and Underlying Topography Inversion Using Polarimetric SAR Tomography Based on SKP Decomposition and Maximum Likelihood Estimation" Forests 12, no. 4: 444. https://doi.org/10.3390/f12040444
APA StyleWan, J., Wang, C., Shen, P., Hu, J., Fu, H., & Zhu, J. (2021). Forest Height and Underlying Topography Inversion Using Polarimetric SAR Tomography Based on SKP Decomposition and Maximum Likelihood Estimation. Forests, 12(4), 444. https://doi.org/10.3390/f12040444