Using Mixed Integer Goal Programming in Final Yield Harvest Planning: A Case Study from the Mediterranean Region of Turkey




Abstract
1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Study Area Data
2.3. Problem Formulation
- years (1, 20)
- objectives: 1 = area scheduled for harvest, 2 = volume scheduled for harvest
- weight for negative deviations in objective j, year i
- weight for positive deviations in objective j, year i
- negative deviation in objective j, year i
- positive deviation in objective j, year i
- regeneration stands
- binary (0, 1) decision variable representing the harvest of stand k during year i
- area available for harvest in stand k during year i
- volume available for harvest in stand k during year i
- binary (0, 1) decision variable representing the harvest of stand m during year i
- pairs of adjacent stands
- total area scheduled for harvest in year i
- area target in year i
- total volume scheduled for harvest in year i
- volume target in year i
3. Results
3.1. Results from the Regeneration Model
3.1.1. The Results for Area
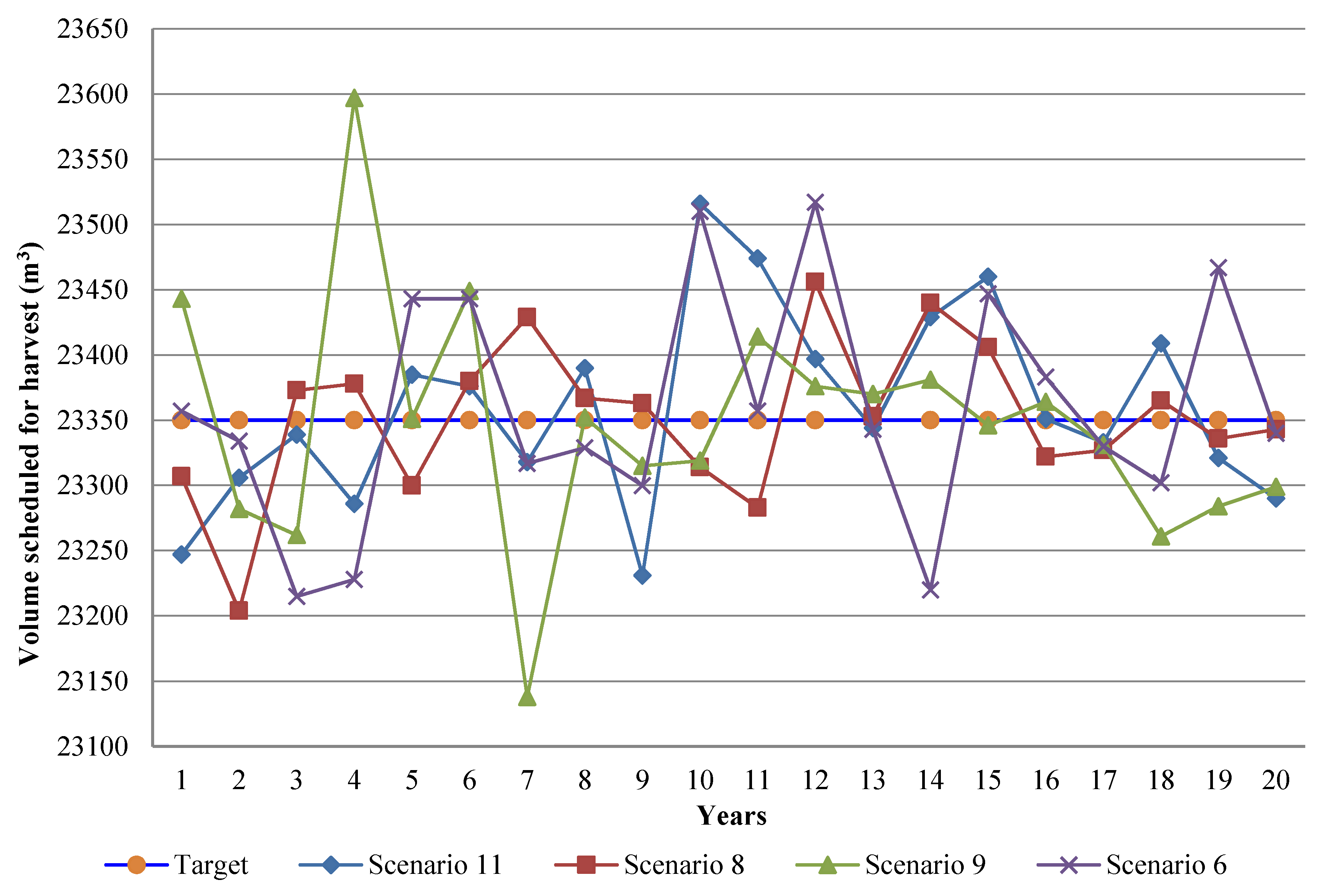
3.1.2. The Results for Volume
3.2. Comparison of the Actual Regeneration Plan Data with the Results of the Regeneration Model
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zengin, H.; Yeşil, A.; Asan, Ü.; Bettinger, P.; Cieszewski, C.; Siry, J.P. Evolution of modern forest management planning in the Republic of Turkey. J. For. 2013, 111, 239–248. [Google Scholar] [CrossRef]
- Bettinger, P.; Sessions, J. Spatial forest planning: To adopt, or not to adopt? J. For. 2003, 101, 24–29. [Google Scholar]
- Bettinger, P.; Chung, W. The key literature of, and trends in, forest-level management planning in North America, 1950–2001. Int. Forest. Rev. 2004, 6, 40–50. [Google Scholar] [CrossRef]
- Kaya, A.; Bettinger, P.; Boston, K.; Akbulut, R.; Ucar, Z.; Siry, J.; Merry, K.; Cieszewski, C. Optimisation in forest management. Curr. For. Rep. 2016, 2, 1–17. [Google Scholar] [CrossRef]
- Eraslan, İ. Forest Management; Faculty of Forestry, Istanbul University: Istanbul, Turkey, 1982. [Google Scholar]
- General Directorate of Forestry. Procedures and Principles Regarding the Preparation of Ecosystem Based Functional Forest Management Plans, Communiqué Number: 299; General Directorate of Forestry: Ankara, Turkey, 2014.
- Bertomeu, M.; Romero, C. Managing forest biodiversity: A zero-one goal programming approach. Agric. Syst. 2001, 68, 197–213. [Google Scholar] [CrossRef]
- Öhman, K. Forest Planning with Consideration to Spatial Relationships. Ph.D. Thesis, Swedish University of Agricultural Sciences, Uppsala, Sweden, 2001. [Google Scholar]
- Murray, A.T. Spatial restrictions in harvest scheduling. For. Sci. 1999, 45, 45–52. [Google Scholar]
- Liu, W.-Y.; Lin, C.-C.; Su, K.-H. Modelling the spatial forest-thinning planning problem considering carbon sequestration and emissions. For. Policy Econ. 2017, 78, 51–66. [Google Scholar] [CrossRef]
- Qin, H.; Dong, L.; Huang, Y. Evaluating the effects of carbon prices on trade-offs between carbon and timber management objectives in forest spatial harvest scheduling problems: A case study from northeast China. Forests 2017, 8, 43. [Google Scholar] [CrossRef]
- Augustynczik, A.L.D.; Arce, J.E.; da Silva, A.C.L. Spatial forest harvest planning considering maximum operational areas. Cerne 2015, 21, 649–656. [Google Scholar] [CrossRef]
- Tarp, P.; Helles, F. Spatial optimization by simulated annealing and linear programming. Scand. J. For. Res. 1997, 12, 390–402. [Google Scholar] [CrossRef]
- Demirci, M.; Bettinger, P. Using mixed integer multi-objective goal programming for stand tending block designation: A case study from Turkey. For. Policy Econ. 2015, 55, 28–36. [Google Scholar] [CrossRef]
- Charnes, A.; Cooper, W.W.; Ferguson, R.O. Optimal estimation of executive compensation by linear programming. Manag Sci. 1955, 1, 138–151. [Google Scholar] [CrossRef]
- Charnes, A.; Cooper, W.W. Management Models and Industrial Applications of Linear Programming; John Wiley & Sons: New York, NY, USA, 1961; Volume 1, ISBN 978-0-471-14850-0. [Google Scholar]
- Ijiri, Y. Management goals and accounting for control. In Studies in Mathematical and Managerial Economics; Theil, H., Ed.; North-Holland Publishing Co.: Amsterdam, The Netherlands, 1965; Volume 3, 191p. [Google Scholar]
- Lee, S.M. Goal Programming for Decision Analysis; Auerbach Publishers Inc.: Philadelphia, PA, USA, 1972. [Google Scholar]
- Charnes, A.; Cooper, W.W.; Niehaus, R.J. A goal programming model for man power planning. In Management Science in Planning and Control; Blood, J., Ed.; Technical Association of the Pulp and Paper Industry: New York, NY, USA, 1968; pp. 79–93. [Google Scholar]
- Charnes, A.; Cooper, W.W.; Niehaus, R.J.; Sholtz, D. An Extended Goal Programming Model Manpower Planning; Management Science Research Report 188; Carnegie-Mellon University, Graduate School of Industrial Administration: Pittsburgh, PA, USA, 1969. [Google Scholar]
- Charnes, A.; Cooper, W.W.; Niehaus, R.J. Mathematical Models for Man Power and Personnel Planning; Management Science Research Report 234; Carnegie-Mellon University, Graduate School of Industrial Administration: Pittsburgh, PA, USA, 1971. [Google Scholar]
- Charnes, A.; Cooper, W.W.; Niehaus, R.J.; Sholtz, D. Multi-Level Models for Career Management and Resource Planning; Management Science Research Report 256; Carnegie-Mellon University, Graduate School of Industrial Administration: Pittsburgh, PA, USA, 1971. [Google Scholar]
- Charnes, A.; Cooper, W.W.; Devoe, J.K.; Learner, D.B.; Reinecke, W. A goal programming model for media planning. Manag. Sci. 1968, 14, 423–430. [Google Scholar] [CrossRef]
- Charnes, A.; Cooper, W.W.; Learner, D.B.; Snow, E.F. Note on an application of a goal programming model for media planning. Manag. Sci. 1968, 14, 431–436. [Google Scholar] [CrossRef]
- Lee, S.M. Decision analysis through goal programming. Decis. Sci. 1971, 2, 172–180. [Google Scholar]
- Lee, S.M.; Lerro, A.J.; McGinnis, B.R. Optimization of tax switching for commercial banks: Comments. J. Money Credit Bank. 1971, 3, 293–303. [Google Scholar] [CrossRef]
- Lee, S.M.; Clayton, E.R. A goal programming model for academic resource allocation. Manag. Sci. 1972, 18, 395–408. [Google Scholar] [CrossRef]
- Courtney, J.F., Jr.; Klastorin, T.D.; Ruefli, T.W. A goal programming approach to urban-suburban location preferences. Manag. Sci. 1972, 18, 258–268. [Google Scholar] [CrossRef]
- Rustagi, K.P. Forest Management Planning for Timber Production: A Goal Programming Approach. Ph.D. Thesis, Yale University, New Haven, CT, USA, 1973. [Google Scholar]
- Field, D.B. Goal programming for forest management. For. Sci. 1973, 19, 125–135. [Google Scholar]
- Porterfield, R.L. Predicted and Potential Gains from Tree Improvement Programs—A Goal Programming Analysis of Program Efficiency. Ph.D. Thesis, Yale University, New Haven, CT, USA, 1973. [Google Scholar]
- Porterfield, R.L. Predicted and Potential Gains from Tree Improvement Programs: A Goal Programming Analysis of Program Efficiency; Technical Report No. 52; North Carolina State University, School of Forest Resources: Raleigh, NC, USA, 1974. [Google Scholar]
- Lyon, G. Applications of Goal Programming and Accounting for Control in the Forest Industry; College of Forest Resources, University of Washington: Seattle, WA, USA, 1974; Unpublished work. [Google Scholar]
- Romesburg, C.H. Scheduling models for wilderness recreation. J. Environ. Manag. 1974, 2, 159–177. [Google Scholar]
- Bell, E.F. Problems with goal programming on a national forest planning unit. In Proceedings of the Systems Analysis and Forest Resource Management Workshop, Athens, GA, USA, 11–13 August 1975; pp. 119–126. [Google Scholar]
- Bare, B.; Anholt, B. Selecting Forest Residue Treatment Alternatives Using Goal Programming; General Technical Report PNW-43; USDA Forest Service, Pacific Northwest Forest and Range Experiment Station: Portland, OR, USA, 1976.
- Dress, P.E. Forest land use planning-an applications environment for goal programming. In Proceedings of the Systems Analysis and Forest Resource Management Workshop, Athens, GA, USA, 11–13 August 1975; pp. 37–47. [Google Scholar]
- Kao, C.; Brodie, J.D. Goal programming for reconciling economic, even flow, and regulation objectives in forest harvest scheduling. Can. J. For. Res. 1979, 9, 525–531. [Google Scholar] [CrossRef]
- Field, R.C.; Dress, P.E.; Fortson, J.C. Complementary linear and goal programming procedures for timber harvest scheduling. For. Sci. 1980, 26, 121–133. [Google Scholar]
- Kangas, J.; Pukkala, T. A decision theoretic approach applied to goal programming of forest management. Silva Fenn. 1992, 26, 169–176. [Google Scholar] [CrossRef][Green Version]
- Diaz-Balteiro, L.; Romero, C. Modeling timber harvest scheduling problems with multiple criteria: An application in Spain. For. Sci. 1998, 44, 47–57. [Google Scholar]
- Mısır, M. Developing a Multi-Objective Model Forest Management Plan Using GIS and Goal Programming (A Case Study of Ormanüstü Planning Unit). Ph.D. Thesis, Karadeniz Technical University, Trabzon, Turkey, 2001. [Google Scholar]
- Gómez, T.; Hernández, M.; Molina, J.; León, M.A.; Aldana, E.; Caballero, R. A multi objective model for forest planning with adjacency constraints. Ann. Oper. Res. 2011, 190, 75–92. [Google Scholar] [CrossRef]
- Chen, Y.-T.; Zheng, C.; Chang, C.-T. 3-level MCGP: An efficient algorithm for MCGP in solving multi-forest management problems. Scand. J. For. Res. 2011, 26, 457–465. [Google Scholar] [CrossRef]
- Chen, Y.-T.; Chang, C.-T. Multi-coefficient goal programming in thinning schedules to increase carbon sequestration and improve forest structure. Ann. For. Sci. 2014, 71, 907–915. [Google Scholar] [CrossRef]
- Zengin, H.; Asan, Ü.; Destan, S.; Ünal, M.E.; Yeşil, A.; Bettinger, P.; Değermenci, A.S. Modeling harvest scheduling in multifunctional planning of forests for long term water yield optimization. Nat. Resour. Model. 2015, 28, 59–85. [Google Scholar] [CrossRef]
- Augustynczik, A.L.D.; Arce, J.E.; da Silva, A.C.L. Aggregating forest harvesting activities in forest plantations through integer linear programming and goal programming. J. For. Econ. 2016, 24, 72–81. [Google Scholar] [CrossRef]
- Bagdon, B.A.; Huang, C.-H.; Dewhurst, S. Managing for ecosystem services in northern Arizona ponderosa pine forests using a novel simulation-to-optimization methodology. Ecol. Model. 2016, 324, 11–27. [Google Scholar] [CrossRef]
- Etemad, S.S.; Limaei, S.M.; Olsson, L.; Yousefpour, R. Forest management decision-making using goal programming and fuzzy analytic hierarchy process approaches (case study: Hyrcanian forests of Iran). J. Forest Sci. 2019, 65, 368–379. [Google Scholar] [CrossRef]
- Ezquerro, M.; Pardos, M.; Diaz-Baltiero, L. Operational research techniques used for addressing biodiversity objectives into forest management: An overview. Forests 2016, 7, 229. [Google Scholar] [CrossRef]
- Álvarez-Miranda, E.; Garcia-Gonzalo, J.; Ulloa-Fierro, F.; Weintraub, A.; Barreiro, S. A multicriteria optimization model for sustainable forest management under climate change uncertainty: An application in Portugal. Eur. J. Oper. Res. 2018, 269, 79–98. [Google Scholar] [CrossRef]
- Bertomeu, M.; Romero, C. Forest management optimisation models and habitat diversity: A goal programming approach. J. Oper. Res. Soc. 2002, 53, 1175–1184. [Google Scholar] [CrossRef]
- General Directorate of Forestry. Ecosystem Based Functional Forest Management Plan of the Akoren Sub-District; General Directorate of Forestry: Ankara, Turkey, 2014.
- General Directorate of Forestry. Communiqué on Technical Principles of Silvicultural Applications; General Directorate of Forestry: Ankara, Turkey, 2014.
- Lindo Systems, Inc. Lingo 16.0—Optimization Modeling Software for Linear, Nonlinear, and Integer Programming; Lindo Systems Inc.: Chicago, IL, USA, 2016. [Google Scholar]
- Pos Forest District Directorate. Regeneration Plan of the Akoren Forest Sub-District for 2014–2023 (Detailed Silviculture Plan); Adana Forest Regional Directorate, Pos Forest District Directorate: Adana, Turkey, 2015. [Google Scholar]
- Walters, K.R.; Feunekes, H.; Cogswell, A.; Cox, E. A forest planning system for solving spatial harvest-scheduling problems. In Proceedings of the Canadian Operations Research Society National Conference, Windsor, ON, Canada, 7–9 June 1999. [Google Scholar]
- Tamiz, M.; Jones, D.; Romero, C. Goal programming for decision making: An overview of the current state-of-the-art. Eur. J. Oper. Res. 1998, 111, 569–581. [Google Scholar] [CrossRef]
- Romero, C. Handbook of Critical Issues in Goal Programming; Pergamon Press: Oxford, UK, 1991; ISBN 978-1-483-29511-4. [Google Scholar]
- De Kluyver, C.A. An exploration of various goal programming formulations—With application to advertising media scheduling. J. Oper. Res. Soc. 1979, 30, 167–171. [Google Scholar]
- Wildhelm, W.B. Extensions of goal programming models. Omega 1981, 9, 212–214. [Google Scholar] [CrossRef]
- Jones, D.F. The Design and Development of an Intelligent Goal Programming System. Ph.D. Thesis, University of Portsmouth, Portsmouth, UK, 1995. [Google Scholar]
- Masud, A.S.; Hwang, C.L. Interactive sequential goal programming. J. Oper. Res. Soc. 1981, 32, 391–400. [Google Scholar] [CrossRef]
- Jadidi, O.; Zolfaghari, S.; Cavalieri, S. A new normalized goal programming model for multi-objective problems: A case of supplier selection and order allocation. Int. J. Prod. Econ. 2014, 148, 158–165. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables and Constraints | Linear Regeneration Model |
|---|---|
| Variables | 3620 |
| Nonlinear variables | 0 |
| Integer variables | 3500 |
| Constraints | 2767 |
| Nonlinear constraints | 0 |
| Scenario | Area Weight (wi1+ and wi1−) | Volume Weight (wi2+ and wi2−) |
|---|---|---|
| 1 | 1.0 | 0.0 |
| 2 | 0.9 | 0.1 |
| 3 | 0.8 | 0.2 |
| 4 | 0.7 | 0.3 |
| 5 | 0.6 | 0.4 |
| 6 | 0.5 | 0.5 |
| 7 | 0.4 | 0.6 |
| 8 | 0.3 | 0.7 |
| 9 | 0.2 | 0.8 |
| 10 | 0.1 | 0.9 |
| 11 | 0.0 | 1.0 |
| Scenario | Total Solver Iterations | Elapsed Runtime |
|---|---|---|
| Scenario 1 | 500,000,001 | 7 h 58 min 4 s |
| Scenario 2 | 500,000,000 | 33 h 25 min 15 s |
| Scenario 3 | 500,000,000 | 7 h 3 min 34 s |
| Scenario 4 | 500,000,001 | 35 h 39 min 2 s |
| Scenario 5 | 500,000,001 | 32 h 14 min 54 s |
| Scenario 6 | 500,000,000 | 5 h 52 min 12 s |
| Scenario 7 | 500,000,001 | 30 h 31 min 15 s |
| Scenario 8 | 500,000,000 | 32 min 48 s |
| Scenario 9 | 500,000,000 | 5 h 42 min 36 s |
| Scenario 10 | 500,000,001 | 30 h 36 min 53 s |
| Scenario 11 | 500,000,001 | 20 h 28 min 26 s |
| Scenario | Deviations from Goals | |
|---|---|---|
| Area (ha) | Volume (m3) | |
| 1 | 3.8 | 60,613 |
| 2 | 14.2 | 10,968 |
| 3 | 3.8 | 2889 |
| 4 | 25.4 | 7951 |
| 5 | 24.5 | 3790 |
| 6 | 27.2 | 1366 |
| 7 | 36.1 | 3414 |
| 8 | 34.7 | 874 |
| 9 | 64.8 | 1260 |
| 10 | 105.9 | 2827 |
| 11 | 197.6 | 1025 |
| Year | Scenario | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | |
| 1 | 89.5 | 88.7 | 88.9 | 88.6 | 89.8 | 93.1 | 91.7 | 92.9 | 94.8 | 106.1 | 115.4 |
| 2 | 88.8 | 90.4 | 89.1 | 90.4 | 89.7 | 90.2 | 89.4 | 89.7 | 98.5 | 89.7 | 130.2 |
| 3 | 89.0 | 87.7 | 88.9 | 90.0 | 94.6 | 88.6 | 87.6 | 89.0 | 87.8 | 92.7 | 99.8 |
| 4 | 88.9 | 88.5 | 88.3 | 89.0 | 89.2 | 89.3 | 89.4 | 92.4 | 88.3 | 95.7 | 89.5 |
| 5 | 88.8 | 88.9 | 88.5 | 89.2 | 85.2 | 88.9 | 88.9 | 87.5 | 91.3 | 93.7 | 90.5 |
| 6 | 88.8 | 89.4 | 88.7 | 91.4 | 88.4 | 89.0 | 84.9 | 91.8 | 89.3 | 95.9 | 91.5 |
| 7 | 88.9 | 88.7 | 88.8 | 90.2 | 87.9 | 88.5 | 88.4 | 88.2 | 89.7 | 90.8 | 88.7 |
| 8 | 88.9 | 89.0 | 88.8 | 88.2 | 89.6 | 88.8 | 89.3 | 88.5 | 83.6 | 86.0 | 99.7 |
| 9 | 88.7 | 87.8 | 89.4 | 91.7 | 89.2 | 87.1 | 92.3 | 87.9 | 91.8 | 86.9 | 90.8 |
| 10 | 88.7 | 87.3 | 88.8 | 85.7 | 90.1 | 87.3 | 87.1 | 89.1 | 88.0 | 88.7 | 76.2 |
| 11 | 89.0 | 87.5 | 88.8 | 86.4 | 87.7 | 84.9 | 86.3 | 89.0 | 88.7 | 89.2 | 79.8 |
| 12 | 88.9 | 91.4 | 88.8 | 90.2 | 88.6 | 86.6 | 88.7 | 85.0 | 90.2 | 90.5 | 90.2 |
| 13 | 89.2 | 88.4 | 88.5 | 89.1 | 88.1 | 90.3 | 91.2 | 85.6 | 83.2 | 75.3 | 76.9 |
| 14 | 88.6 | 88.7 | 89.1 | 89.3 | 89.6 | 91.8 | 84.6 | 89.2 | 92.0 | 90.6 | 81.7 |
| 15 | 89.1 | 88.4 | 88.7 | 83.2 | 88.0 | 88.5 | 87.4 | 90.2 | 92.4 | 88.5 | 80.6 |
| 16 | 88.7 | 90.0 | 88.8 | 89.1 | 88.2 | 91.8 | 87.8 | 83.2 | 90.9 | 81.6 | 76.8 |
| 17 | 89.0 | 88.6 | 88.9 | 88.6 | 90.1 | 87.9 | 88.1 | 89.0 | 88.3 | 95.4 | 89.7 |
| 18 | 88.8 | 88.8 | 89.2 | 89.3 | 88.8 | 88.6 | 93.3 | 92.4 | 78.1 | 83.0 | 74.7 |
| 19 | 87.9 | 89.6 | 89.2 | 88.6 | 87.5 | 88.6 | 92.2 | 87.8 | 82.5 | 72.4 | 74.3 |
| 20 | 88.8 | 89.2 | 88.8 | 88.8 | 86.7 | 87.2 | 88.4 | 88.6 | 87.6 | 84.3 | 80.0 |
| Total | 1777.0 | 1777.0 | 1777.0 | 1777.0 | 1777.0 | 1777.0 | 1777.0 | 1777.0 | 1777.0 | 1777.0 | 1777.0 |
| Year | Scenario | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | |
| 1 | 0.65 | −0.15 | 0.05 | −0.25 | 0.95 | 4.25 | 2.85 | 4.05 | 5.95 | 17.25 | 26.55 |
| 2 | −0.05 | 1.55 | 0.25 | 1.55 | 0.85 | 1.35 | 0.55 | 0.85 | 9.65 | 0.85 | 41.35 |
| 3 | 0.15 | −1.15 | 0.05 | 1.15 | 5.75 | −0.25 | −1.25 | 0.15 | −1.05 | 3.85 | 10.95 |
| 4 | 0.05 | −0.35 | −0.55 | 0.15 | 0.35 | 0.45 | 0.55 | 3.55 | −0.55 | 6.85 | 0.65 |
| 5 | −0.05 | 0.05 | −0.35 | 0.35 | −3.65 | 0.05 | 0.05 | −1.35 | 2.45 | 4.85 | 1.65 |
| 6 | −0.05 | 0.55 | −0.15 | 2.55 | −0.45 | 0.15 | −3.95 | 2.95 | 0.45 | 7.05 | 2.65 |
| 7 | 0.05 | −0.15 | −0.05 | 1.35 | −0.95 | −0.35 | −0.45 | −0.65 | 0.85 | 1.95 | −0.15 |
| 8 | 0.05 | 0.15 | −0.05 | −0.65 | 0.75 | −0.05 | 0.45 | −0.35 | −5.25 | −2.85 | 10.85 |
| 9 | −0.15 | −1.05 | 0.55 | 2.85 | 0.35 | −1.75 | 3.45 | −0.95 | 2.95 | −1.95 | 1.95 |
| 10 | −0.15 | −1.55 | −0.05 | −3.15 | 1.25 | −1.55 | −1.75 | 0.25 | −0.85 | −0.15 | −12.65 |
| 11 | 0.15 | −1.35 | −0.05 | −2.45 | −1.15 | −3.95 | −2.55 | 0.15 | −0.15 | 0.35 | −9.05 |
| 12 | 0.05 | 2.55 | −0.05 | 1.35 | −0.25 | −2.25 | −0.15 | −3.85 | 1.35 | 1.65 | 1.35 |
| 13 | 0.35 | −0.45 | −0.35 | 0.25 | −0.75 | 1.45 | 2.35 | −3.25 | −5.65 | −13.55 | −11.95 |
| 14 | −0.25 | −0.15 | 0.25 | 0.45 | 0.75 | 2.95 | −4.25 | 0.35 | 3.15 | 1.75 | −7.15 |
| 15 | 0.25 | −0.45 | −0.15 | −5.65 | −0.85 | −0.35 | −1.45 | 1.35 | 3.55 | −0.35 | −8.25 |
| 16 | −0.15 | 1.15 | −0.05 | 0.25 | −0.65 | 2.95 | −1.05 | −5.65 | 2.05 | −7.25 | −12.05 |
| 17 | 0.15 | −0.25 | 0.05 | −0.25 | 1.25 | −0.95 | −0.75 | 0.15 | −0.55 | 6.55 | 0.85 |
| 18 | −0.05 | −0.05 | 0.35 | 0.45 | −0.05 | −0.25 | 4.45 | 3.55 | −10.75 | −5.85 | −14.15 |
| 19 | −0.95 | 0.75 | 0.35 | −0.25 | −1.35 | −0.25 | 3.35 | −1.05 | −6.35 | −16.45 | −14.55 |
| 20 | −0.05 | 0.35 | −0.05 | −0.05 | −2.15 | −1.65 | −0.45 | −0.25 | −1.25 | −4.55 | −8.85 |
| Total a | 3.80 | 14.20 | 3.80 | 25.40 | 24.50 | 27.20 | 36.10 | 34.70 | 64.80 | 105.90 | 197.60 |
| Year | Scenarios | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | |
| 1 | 19,454 | 22,253 | 22,303 | 22,228 | 22,524 | 23,357 | 23,006 | 23,307 | 23,443 | 23,334 | 23,357 |
| 2 | 16,797 | 23,382 | 22,991 | 23,382 | 23,196 | 23,334 | 23,127 | 23,204 | 23,282 | 23,202 | 23,403 |
| 3 | 21,246 | 23,102 | 23,266 | 23,820 | 23,258 | 23,215 | 23,327 | 23,373 | 23,262 | 24,040 | 23,361 |
| 4 | 21,151 | 23,155 | 23,353 | 23,092 | 23,075 | 23,228 | 23,314 | 23,378 | 23,597 | 23,361 | 23,374 |
| 5 | 17,625 | 22,333 | 23,322 | 23,226 | 23,094 | 23,443 | 23,448 | 23,300 | 23,351 | 23,126 | 23,363 |
| 6 | 21,838 | 23,348 | 23,320 | 23,197 | 23,452 | 23,443 | 23,119 | 23,380 | 23,449 | 23,526 | 23,337 |
| 7 | 20,627 | 22,895 | 23,603 | 23,327 | 23,694 | 23,317 | 23,600 | 23,429 | 23,138 | 23,264 | 23,296 |
| 8 | 22,521 | 23,954 | 23,442 | 23,886 | 23,080 | 23,329 | 23,214 | 23,367 | 23,352 | 23,512 | 23,426 |
| 9 | 23,983 | 23,295 | 23,309 | 23,747 | 23,476 | 23,300 | 23,612 | 23,363 | 23,315 | 23,339 | 23,342 |
| 10 | 23,020 | 24,944 | 23,372 | 22,025 | 23,460 | 23,510 | 23,634 | 23,314 | 23,319 | 23,376 | 23,516 |
| 11 | 26,781 | 24,455 | 23,375 | 23,624 | 23,655 | 23,357 | 23,464 | 23,283 | 23,414 | 23,489 | 23,290 |
| 12 | 25,910 | 23,824 | 23,315 | 22,080 | 23,181 | 23,517 | 23,462 | 23,456 | 23,376 | 23,178 | 23,263 |
| 13 | 25,741 | 22,933 | 23,188 | 23,663 | 23,351 | 23,343 | 23,178 | 23,353 | 23,370 | 23,349 | 23,192 |
| 14 | 23,691 | 21,352 | 23,243 | 23,824 | 23,510 | 23,220 | 23,367 | 23,440 | 23,381 | 23,062 | 23,362 |
| 15 | 22,466 | 22,893 | 23,255 | 23,007 | 23,363 | 23,447 | 23,626 | 23,406 | 23,346 | 23,254 | 23,460 |
| 16 | 27,035 | 23,451 | 23,430 | 23,545 | 23,345 | 23,383 | 23,391 | 23,322 | 23,364 | 23,280 | 23,391 |
| 17 | 24,218 | 24,257 | 23,413 | 23,634 | 23,057 | 23,330 | 23,169 | 23,327 | 23,331 | 23,415 | 23,329 |
| 18 | 24,999 | 23,448 | 23,282 | 23,217 | 23,401 | 23,302 | 23,432 | 23,365 | 23,261 | 23,200 | 23,384 |
| 19 | 29,779 | 23,381 | 23,331 | 23,343 | 23,252 | 23,467 | 22,912 | 23,336 | 23,284 | 23,503 | 23,332 |
| 20 | 35,221 | 23,269 | 23,626 | 23,568 | 23,210 | 23,340 | 23,444 | 23,343 | 23,299 | 23,207 | 23,409 |
| Total | 474,103 | 465,924 | 465,739 | 465,435 | 465,634 | 467,182 | 466,846 | 467,046 | 466,934 | 467,017 | 467,187 |
| Year | Scenario | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | |
| 1 | −3896 | −1097 | −1047 | −1122 | −826 | 7 | −344 | −43 | 93 | −16 | 7 |
| 2 | −6553 | 32 | −359 | 32 | −154 | −16 | −223 | −146 | −68 | −148 | 53 |
| 3 | −2104 | −248 | −84 | 470 | −92 | −135 | −23 | 23 | −88 | 690 | 11 |
| 4 | −2199 | −195 | 3 | −258 | −275 | −122 | −36 | 28 | 247 | 11 | 24 |
| 5 | −5725 | −1017 | −28 | −124 | −256 | 93 | 98 | −50 | 1 | −224 | 13 |
| 6 | −1512 | −2 | −30 | −153 | 102 | 93 | −231 | 30 | 99 | 176 | −13 |
| 7 | −2723 | −455 | 253 | −23 | 344 | −33 | 250 | 79 | −212 | −86 | −54 |
| 8 | −829 | 604 | 92 | 536 | −270 | −21 | −136 | 17 | 2 | 162 | 76 |
| 9 | 633 | −55 | −41 | 397 | 126 | −50 | 262 | 13 | −35 | −11 | −8 |
| 10 | −330 | 1594 | 22 | −1325 | 110 | 160 | 284 | −36 | −31 | 26 | 166 |
| 11 | 3431 | 1105 | 25 | 274 | 305 | 7 | 114 | −67 | 64 | 139 | −60 |
| 12 | 2560 | 474 | −35 | −1270 | −169 | 167 | 112 | 106 | 26 | −172 | −87 |
| 13 | 2391 | −417 | −162 | 313 | 1 | −7 | −172 | 3 | 20 | −1 | −158 |
| 14 | 341 | −1998 | −107 | 474 | 160 | −130 | 17 | 90 | 31 | −288 | 12 |
| 15 | −884 | −457 | −95 | −343 | 13 | 97 | 276 | 56 | −4 | −96 | 110 |
| 16 | 3685 | 101 | 80 | 195 | −5 | 33 | 41 | −28 | 14 | −70 | 41 |
| 17 | 868 | 907 | 63 | 284 | −293 | −20 | −181 | −23 | −19 | 65 | −21 |
| 18 | 1649 | 98 | −68 | −133 | 51 | −48 | 82 | 15 | −89 | −150 | 34 |
| 19 | 6429 | 31 | −19 | −7 | −98 | 117 | −438 | −14 | −66 | 153 | −18 |
| 20 | 11,871 | −81 | 276 | 218 | −140 | −10 | 94 | −7 | −51 | −143 | 59 |
| Total a | 60,613 | 10,968 | 2889 | 7951 | 3790 | 1366 | 3414 | 874 | 1260 | 2827 | 1025 |
| Forest Management Plan | Detailed Silviculture Plan a | ||||
|---|---|---|---|---|---|
| Area (ha) | Allowable Cut (m3) | Area (ha) | Allowable Cut (m3) | ||
| Regeneration area | 906.9 | 215,480 | Natural regeneration | 344.9 | 85,601 |
| Artificial regeneration | 427.7 | 95,604 | |||
| Regenerated area in 2014 | 109.2 | 28,395 | |||
| Total regeneration | 881.8 | 209,600 | |||
| Islet of aging | 25.1 | 5880 | |||
| General Total | 906.9 | 215,480 | |||
| Year | Scenario 3 of the Regeneration Model | Silviculture Plan | ||||||
|---|---|---|---|---|---|---|---|---|
| Area (ha) | Deviation (ha) | Volume (m3) | Deviation (m3) | Area (ha) | Deviation (ha) | Volume (m3) | Deviation (m3) | |
| 2014 | 88.9 | 0.05 | 22,303 | −1047 | 109.2 | 21.02 | 28,395 | 7435 |
| 2015 | 89.1 | 0.25 | 22,991 | −359 | 94.0 | 5.82 | 21,196 | 236 |
| 2016 | 88.9 | 0.05 | 23,266 | −84 | 84.4 | −3.78 | 18,987 | −1973 |
| 2017 | 88.3 | −0.55 | 23,353 | 3 | 82.9 | −5.28 | 20,751 | −209 |
| 2018 | 88.5 | −0.35 | 23,322 | −28 | 87.6 | −0.58 | 23,171 | 2211 |
| 2019 | 88.7 | −0.15 | 23,320 | −30 | 88.7 | 0.52 | 20,131 | −829 |
| 2020 | 88.8 | −0.05 | 23,603 | 253 | 83.3 | −4.88 | 17,083 | −3877 |
| 2021 | 88.8 | −0.05 | 23,442 | 92 | 84.5 | −3.68 | 20,172 | −788 |
| 2022 | 89.4 | 0.55 | 23,309 | −41 | 81.7 | −6.48 | 18,400 | −2560 |
| 2023 | 88.8 | −0.05 | 23,372 | 22 | 85.5 | −2.68 | 21,314 | 354 |
| Average | 88.8 | 0.21 | 23,228 | 196 | 88.2 | 5.47 | 20,960 | 2047 |
| Total | 888.2 | 2.10 | 232,281 | 1959 a | 881.8 | 54.72 | 209,600 | 20,472 a |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Demirci, M.; Yeşil, A.; Bettinger, P. Using Mixed Integer Goal Programming in Final Yield Harvest Planning: A Case Study from the Mediterranean Region of Turkey. Forests 2020, 11, 744. https://doi.org/10.3390/f11070744
Demirci M, Yeşil A, Bettinger P. Using Mixed Integer Goal Programming in Final Yield Harvest Planning: A Case Study from the Mediterranean Region of Turkey. Forests. 2020; 11(7):744. https://doi.org/10.3390/f11070744
Chicago/Turabian StyleDemirci, Mehmet, Ahmet Yeşil, and Pete Bettinger. 2020. "Using Mixed Integer Goal Programming in Final Yield Harvest Planning: A Case Study from the Mediterranean Region of Turkey" Forests 11, no. 7: 744. https://doi.org/10.3390/f11070744
APA StyleDemirci, M., Yeşil, A., & Bettinger, P. (2020). Using Mixed Integer Goal Programming in Final Yield Harvest Planning: A Case Study from the Mediterranean Region of Turkey. Forests, 11(7), 744. https://doi.org/10.3390/f11070744