Developing a Scene-Based Triangulated Irregular Network (TIN) Technique for Individual Tree Crown Reconstruction with LiDAR Data



Abstract
1. Introduction
2. Material and Methods
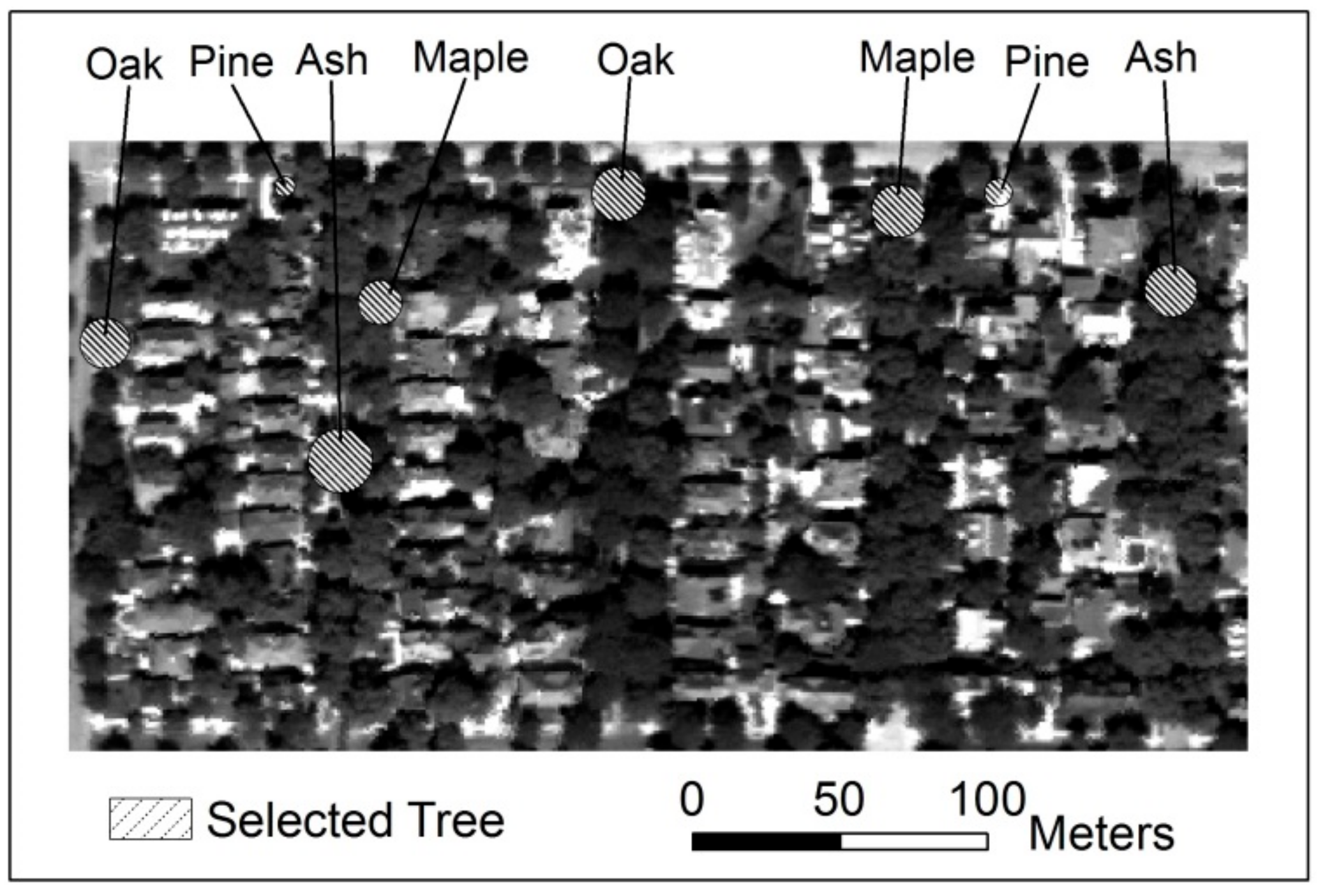
2.1. Study Area
2.2. Data Set
2.3. Methods
2.3.1. Neighbor Identification
2.3.2. Scene-Based Spatial Relationship
2.3.3. Canopy Model Creation
2.3.4. Accuracy Assessment and Comparative Analysis
3. Results
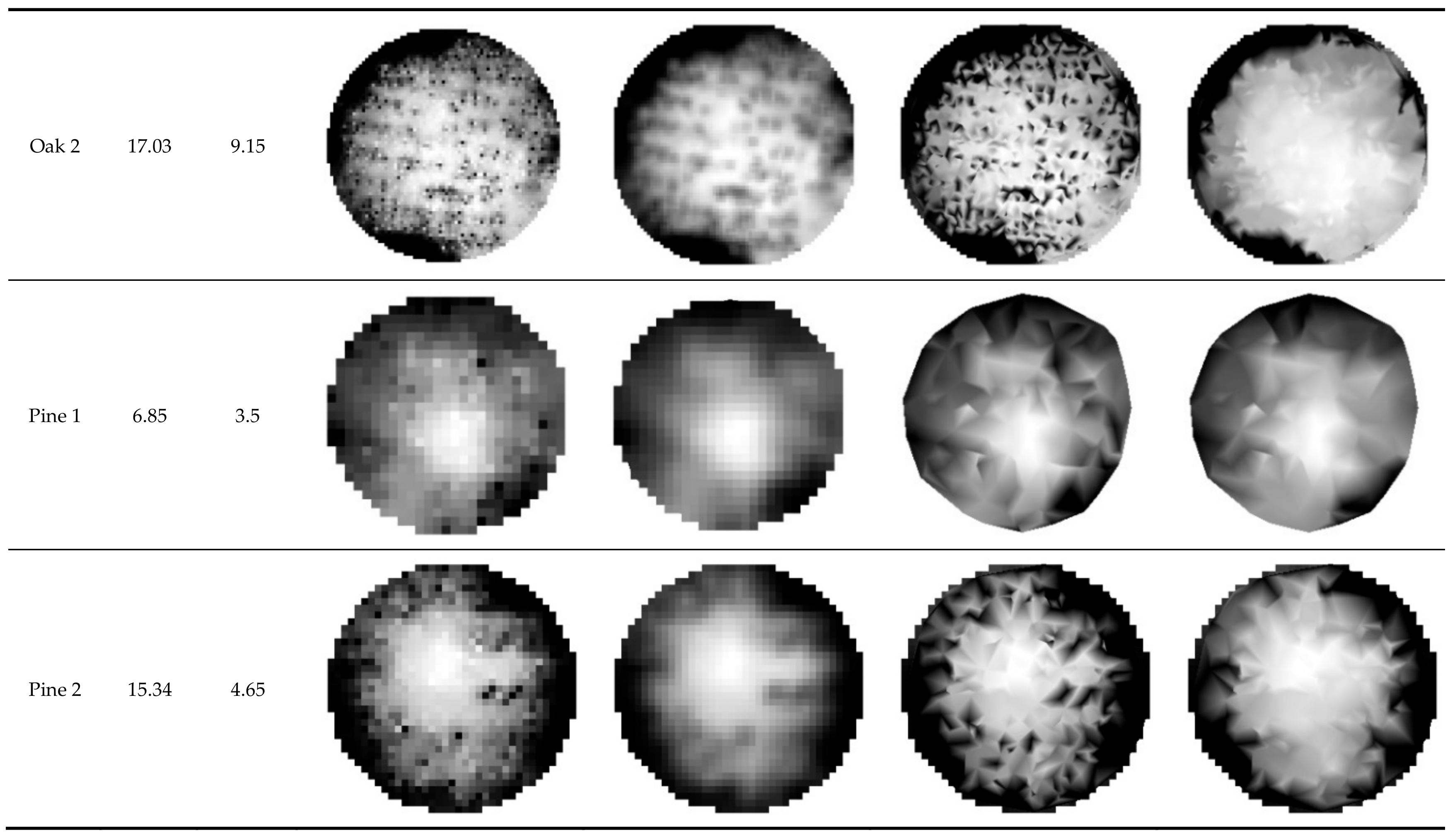
3.1. Control Point Extraction and 3D Model Generation
3.2. Accuracy Assessment and Comparative Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Tasoulas, E.; Varras, G.; Tsirogiannis, I.; Myriounis, C. Development of a GIS application for urban forestry management planning. Procedia Technol. 2013, 8, 70–80. [Google Scholar] [CrossRef]
- Xinyu, G.; Chunjiang, Z.; Yang, L.; Xiangyang, Q.; Xuyang, D.; Guangyu, S. Three-dimensional visualization of maize based on growth models. Trans. Chin. Soc. Agric. Eng. 2007, 2007. [Google Scholar] [CrossRef]
- Liu, H.; Dong, P. A new method for generating canopy height models from discrete-return LiDAR point clouds. Remote. Sens. Lett. 2014, 5, 575–582. [Google Scholar] [CrossRef]
- Persson, A.; Holmgren, J.; Soderman, U. Detecting and measuring individual trees using an airborne laser scanner. Photogramm. Eng. Remote Sens. 2002, 68, 925–932. [Google Scholar]
- Liu, H.; Wu, C. Tree Crown Width Estimation Using Discrete Airborne LiDAR Data. Can. J. Remote. Sens. 2016, 42, 610–618. [Google Scholar] [CrossRef]
- Wang, L.; Gong, P.; Biging, G.S. Individual Tree-Crown Delineation and Treetop Detection in High-Spatial-Resolution Aerial Imagery. Photogramm. Eng. Remote. Sens. 2004, 70, 351–357. [Google Scholar] [CrossRef]
- Leckie, D.; Gougeon, F.; Hill, D.; Quinn, R.; Armstrong, L.; Shreenan, R. Combined high-density lidar and multispectral imagery for individual tree crown analysis. Can. J. Remote. Sens. 2003, 29, 633–649. [Google Scholar] [CrossRef]
- Popescu, S.C.; Wynne, R.H.; Nelson, R.F. Measuring individual tree crown diameter with lidar and assessing its influence on estimating forest volume and biomass. Can. J. Remote. Sens. 2003, 29, 564–577. [Google Scholar] [CrossRef]
- Popescu, S.C. Estimating biomass of individual pine trees using airborne lidar. Biomass Bioenergy 2007, 31, 646–655. [Google Scholar] [CrossRef]
- Ching, J. A perspective on urban canopy layer modeling for weather, climate and air quality applications. Urban Clim. 2013, 3, 13–39. [Google Scholar] [CrossRef]
- Koch, B.; Heyder, U.; Weinacker, H. Detection of Individual Tree Crowns in Airborne Lidar Data. Photogramm. Eng. Remote. Sens. 2006, 72, 357–363. [Google Scholar] [CrossRef]
- Zhang, J.; Lin, X. Filtering airborne LiDAR data by embedding smoothness-constrained segmentation in progressive TIN densification. ISPRS J. Photogramm. Remote. Sens. 2013, 81, 44–59. [Google Scholar] [CrossRef]
- Sumnall, M.J.; Hill, R.A.; Hinsley, S.A. Comparison of small-footprint discrete return and full waveform airborne LiDAR data for estimating multiple forest variables. Remote Sens. Environ. 2016, 173, 214–223. [Google Scholar] [CrossRef]
- Shen, J.; Liu, J.; Lin, X.; Zhao, R. Object-Based Classification of Airborne Light Detection and Ranging Point Clouds in Human Settlements. Sens. Lett. 2012, 10, 221–229. [Google Scholar] [CrossRef]
- Simard, M.; Pinto, N.; Fisher, J.B.; Baccini, A. Mapping forest canopy height globally with spaceborne lidar. J. Geophys. Res. Space Phys. 2011, 116. [Google Scholar] [CrossRef]
- Jan, J.-F. Comparison of forest canopy height derived using LIDAR data and aerial photos. Taiwan J. Sci. 2005, 20, 13–27. [Google Scholar]
- Tseng, Y.-H.; Lin, L.-P.; Wang, C.-K. Mapping CHM and LAI for Heterogeneous Forests Using Airborne Full-Waveform LiDAR Data. Terr. Atmospheric Ocean. Sci. 2016, 27, 537. [Google Scholar] [CrossRef]
- Duan, Z.; Zeng, Y.; Zhao, D.; Wu, B.; Zhao, Y.; Zhu, J. Method of removing pits of canopy height model from airborne laser radar. Trans. Chin. Soc. Agric. Eng. 2014, 30, 209–217. [Google Scholar]
- Khosravipour, A.; Skidmore, A.K.; Wang, T.; Isenburg, M.; Khoshelham, K. Effect of slope on treetop detection using a LiDAR Canopy Height Model. ISPRS J. Photogramm. Remote. Sens. 2015, 104, 44–52. [Google Scholar] [CrossRef]
- Zhao, D.; Pang, Y.; Li, Z.; Bai, L. Study of morphological crown control in LiDAR-derived canopy height model. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012. [Google Scholar]
- Ben-Arie, J.R.; Hay, G.J.; Powers, R.P.; Castilla, G.; St-Onge, B. Development of a pit filling algorithm for LiDAR canopy height models. Comput. Geosci. 2009, 35, 1940–1949. [Google Scholar] [CrossRef]
- Popescu, S.C.; Wynne, R.H. Seeing the trees in the forest. Photogramm. Eng. Remote Sens. 2004, 70, 589–604. [Google Scholar] [CrossRef]
- Van Leeuwen, M.; Coops, N.C.; Wulder, M.A. Canopy surface reconstruction from a LiDAR point cloud using Hough transform. Remote. Sens. Lett. 2010, 1, 125–132. [Google Scholar] [CrossRef]
- Sheng, Y.; Gong, P.; Biging, G. Model-based conifer-crown surface reconstruction from high-resolution aerial images. Photogramm. Eng. Remote Sens. 2001, 67, 957–966. [Google Scholar]
- Morsdorf, F.; Meier, E.; Kötz, B.; Itten, K.I.; Dobbertin, M.; Allgöwer, B. LIDAR-based geometric reconstruction of boreal type forest stands at single tree level for forest and wildland fire management. Remote. Sens. Environ. 2004, 92, 353–362. [Google Scholar] [CrossRef]
- Harikumar, A.; Bovolo, F.; Bruzzone, L. An Internal Crown Geometric Model for Conifer Species Classification with High-Density LiDAR Data. IEEE Trans. Geosci. Remote. Sens. 2017, 55, 1–17. [Google Scholar] [CrossRef]
- Siska, P.P.; Hung, I.-K. Assessment of kriging accuracy in the GIS environment. In Proceedings of the 21st Annual ESRI International User Conference, San Diego, CA, USA, 9–13 January 2001. [Google Scholar]
- Werbrouck, I.; Antrop, M.; Van Eetvelde, V.; Stål, C.; De Maeyer, P.; Bats, M.; Bourgeois, J.; Court-Picon, M.; Crombé, P.; De Reu, J.; et al. Digital Elevation Model generation for historical landscape analysis based on LiDAR data, a case study in Flanders (Belgium). Expert Syst. Appl. 2011, 38, 8178–8185. [Google Scholar] [CrossRef]
- Nguyen, V.T. Building TIN (triangular irregular network) problem in Topology model. In Proceedings of the 2010 International Conference on Machine Learning and Cybernetics; Institute of Electrical and Electronics Engineers (IEEE), Qingdao, China, 11–14 July 2010. [Google Scholar]
- Yang, B.; Li, Q.; Shi, W. Constructing multi-resolution triangulated irregular network model for visualization. Comput. Geosci. 2005, 31, 77–86. [Google Scholar] [CrossRef]
- Ali, T.; Mehrabian, A. A novel computational paradigm for creating a Triangular Irregular Network (TIN) from LiDAR data. Nonlinear Anal. Theory, Methods Appl. 2009, 71, e624–e629. [Google Scholar] [CrossRef]
- Uysal, M.; Polat, N. Investigating Performance Of Airborne Lidar Data Filtering With Triangular Irregular Network (TIN) Algorithm. ISPRS Int. Arch. Photogramm. Remote. Sens. Spat. Inf. Sci. 2014, 40, 199–202. [Google Scholar] [CrossRef]
- Antonarakis, A.; Richards, K.; Brasington, J. Object-based land cover classification using airborne LiDAR. Remote. Sens. Environ. 2008, 112, 2988–2998. [Google Scholar] [CrossRef]
- Vuckovik, M.; Trajanov, D.; Filiposka, S. Durkin’s propagation model based on triangular irregular network terrain. In Proceedings of the International Conference on ICT Innovations, Ohrid, Macedonia, 12–15 September 2010; Springer: New York, NY, USA, 2010. [Google Scholar]
- Zhao, X.; Guo, Q.; Su, Y.; Xue, B. Improved progressive TIN densification filtering algorithm for airborne LiDAR data in forested areas. ISPRS J. Photogramm. Remote. Sens. 2016, 117, 79–91. [Google Scholar] [CrossRef]
- Rasdorf, W.; Cai, H.; Tilley, C.; Brun, S.; Karimi, H.; Robson, F. Transportation Distance Measurement Data Quality. J. Comput. Civ. Eng. 2003, 17, 75–87. [Google Scholar] [CrossRef]
- Slattery, K.T.; Slattery, D.K.; Peterson, J.P. Road construction earthwork volume calculation using three-dimensional laser scanning. J. Surv. Eng. 2011, 138, 96–99. [Google Scholar] [CrossRef]
- Tate, E.C.; Maidment, D.R.; Olivera, F.; Anderson, D.J. Creating a Terrain Model for Floodplain Mapping. J. Hydrol. Eng. 2002, 7, 100–108. [Google Scholar] [CrossRef]
- Stereńczak, K.; Zasada, M. Accuracy of Tree Height Estimation Based on LIDAR Data Analysis. 2011. Available online: https://depot.ceon.pl/bitstream/handle/123456789/5387/sterenczak-11-2-5.pdf?sequence=1&isAllowed=y (accessed on 8 May 2011).
- Mitchell, J.J.; Glenn, N.F.; Sankey, T.T.; Derryberry, D.R.; Anderson, M.O.; Hruska, R.C. Small-footprint LiDAR estimations of sagebrush canopy characteristics. Photogramm. Eng. Remote Sens. 2011, 77, 521–530. [Google Scholar] [CrossRef]
- Korhonen, L.; Vauhkonen, J.; Virolainen, A.; Hovi, A.; Korpela, I. Estimation of tree crown volume from airborne lidar data using computational geometry. Int. J. Remote. Sens. 2013, 34, 7236–7248. [Google Scholar] [CrossRef]
- Tang, S.; Dong, P.; Buckles, B.P. Three-dimensional surface reconstruction of tree canopy from lidar point clouds using a region-based level set method. Int. J. Remote Sens. 2013, 34, 1373–1385. [Google Scholar] [CrossRef]
- Wang, Y.; Weinacker, H.; Koch, B. A Lidar Point Cloud Based Procedure for Vertical Canopy Structure Analysis And 3D Single Tree Modelling in Forest. Sensors 2008, 8, 3938–3951. [Google Scholar] [CrossRef]
- Delagrange, S.; Jauvin, C.; Rochon, P. PypeTree: A Tool for Reconstructing Tree Perennial Tissues from Point Clouds. Sensors 2014, 14, 4271–4289. [Google Scholar] [CrossRef]
- Zhu, C.; Zhang, X.; Hu, B.-G.; Jaeger, M. Reconstruction of Tree Crown Shape from Scanned Data. In Proceedings of the International Conference on Technologies for E-Learning and Digital Entertainment, Nanjing, China, 25–27 June 2008; Springer: New York, NY, USA, 2008. [Google Scholar]
- Lee, J.; Han, S.; Byun, Y.; Kim, Y. Extraction and Regularization of Various Building Boundaries with Complex Shapes Utilizing Distribution Characteristics of Airborne LIDAR Points. ETRI J. 2011, 33, 547–557. [Google Scholar] [CrossRef]
- Guo, Q.; Li, W.; Yu, H.; Alvarez, O. Effects of Topographic Variability and Lidar Sampling Density on Several DEM Interpolation Methods. Photogramm. Eng. Remote. Sens. 2010, 76, 701–712. [Google Scholar] [CrossRef]
- Khosravipour, A.; Skidmore, A.K.; Isenburg, M.; Wang, T.; Hussin, Y.A. Generating Pit-free Canopy Height Models from Airborne Lidar. Photogramm. Eng. Remote. Sens. 2014, 80, 863–872. [Google Scholar] [CrossRef]
- Endo, T.; Sawada, H. Development of an individual tree crown delineation method using lidar data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2010, 38 Pt 8, 675–678. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Models | Absolute Error Mean (m) | Standard Deviation |
|---|---|---|
| Original raster | 0.96 | 1.61 |
| Smoothed raster | 2.05 | 1.82 |
| Ori-TIN derived raster | 1.00 | 1.87 |
| Scene-based TIN derived Raster | 0.18 | 0.41 |
| Average of Errors | Standard Deviation | |||||||
|---|---|---|---|---|---|---|---|---|
| Trees | Original Raster | Smooth Raster | Ori-TIN-Derived Raster | Scene-Based-TIN-Derived Raster | Original Raster | Smooth Raster | Ori-TIN-Derived Raster | Scene-Based-TIN-Derived Raster |
| Ash 1 | 1.17 | 2.42 | 1.16 | 0.20 | 1.76 | 1.79 | 2.03 | 0.47 |
| Ash 2 | 0.90 | 2.07 | 0.91 | 0.11 | 1.69 | 1.77 | 1.81 | 0.22 |
| Maple 1 | 0.99 | 2.05 | 1.08 | 0.16 | 1.53 | 1.65 | 1.97 | 0.28 |
| Maple 2 | 1.49 | 3.11 | 1.53 | 0.20 | 2.08 | 2.03 | 2.33 | 0.41 |
| Oak 1 | 1.14 | 2.50 | 1.15 | 0.117 | 1.59 | 1.62 | 1.65 | 0.31 |
| Oak 2 | 1.06 | 2.34 | 1.20 | 0.126 | 1.43 | 1.65 | 1.91 | 0.53 |
| Pine1 | 0.23 | 0.55 | 0.29 | 0.19 | 0.36 | 0.45 | 0.43 | 0.30 |
| Pine 2 | 0.87 | 1.82 | 1.10 | 0.31 | 1.34 | 1.63 | 1.83 | 0.40 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, H.; Wu, C. Developing a Scene-Based Triangulated Irregular Network (TIN) Technique for Individual Tree Crown Reconstruction with LiDAR Data. Forests 2020, 11, 28. https://doi.org/10.3390/f11010028
Liu H, Wu C. Developing a Scene-Based Triangulated Irregular Network (TIN) Technique for Individual Tree Crown Reconstruction with LiDAR Data. Forests. 2020; 11(1):28. https://doi.org/10.3390/f11010028
Chicago/Turabian StyleLiu, Haijian, and Changshan Wu. 2020. "Developing a Scene-Based Triangulated Irregular Network (TIN) Technique for Individual Tree Crown Reconstruction with LiDAR Data" Forests 11, no. 1: 28. https://doi.org/10.3390/f11010028
APA StyleLiu, H., & Wu, C. (2020). Developing a Scene-Based Triangulated Irregular Network (TIN) Technique for Individual Tree Crown Reconstruction with LiDAR Data. Forests, 11(1), 28. https://doi.org/10.3390/f11010028