Influence of Scan Density on the Estimation of Single-Tree Attributes by Hand-Held Mobile Laser Scanning




Abstract
1. Introduction
2. Materials and Methods
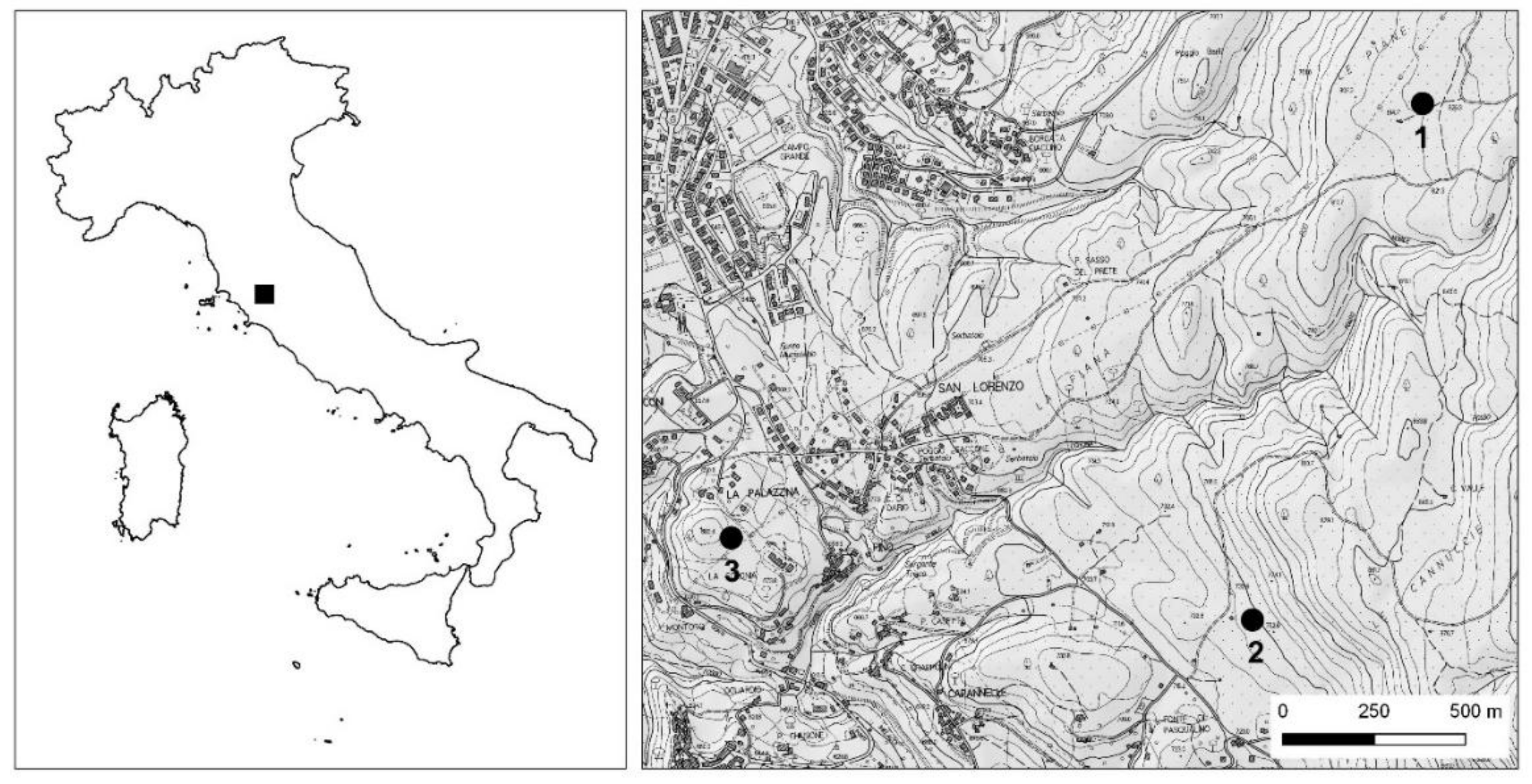
2.1. Study Area
2.2. Hand-Held Mobile Laser Scanning
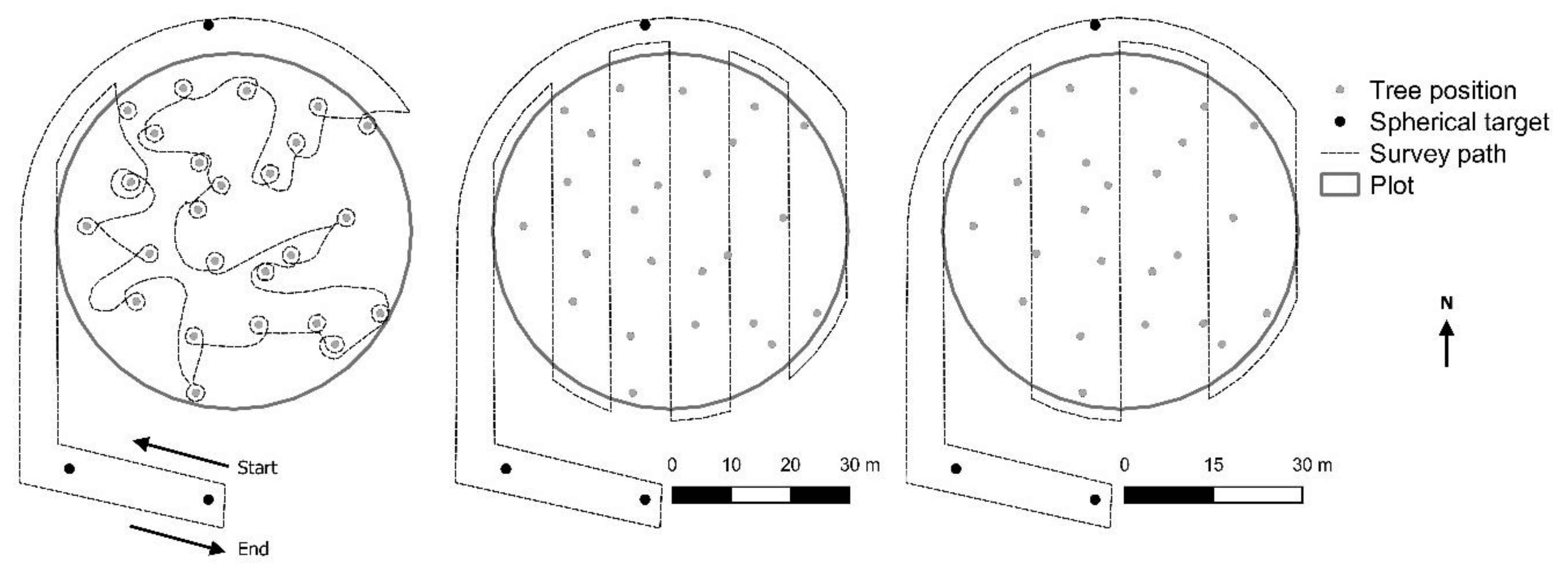
2.3. Hand-Held Mobile Laser Scanning Data Collection and Pre-Processing
2.4. Extraction of Single-Tree Attributes from the Point Clouds
2.5. Reference Data
2.6. Accuracy Assessment
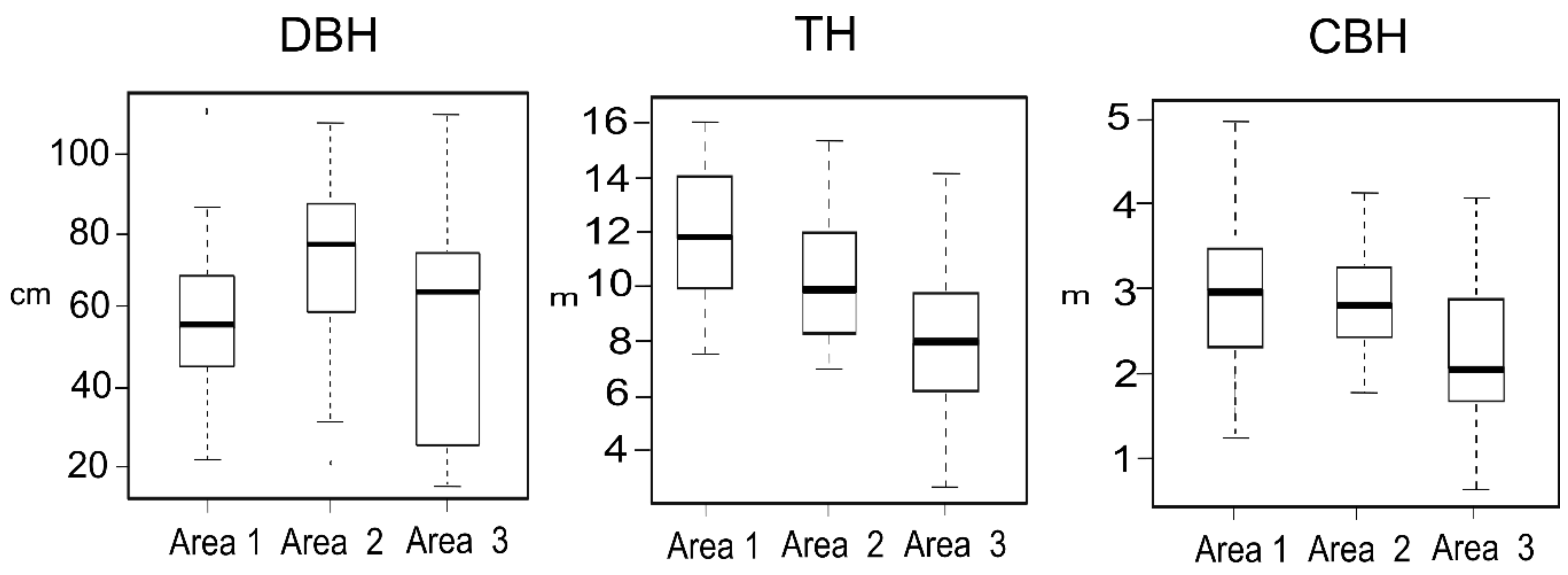
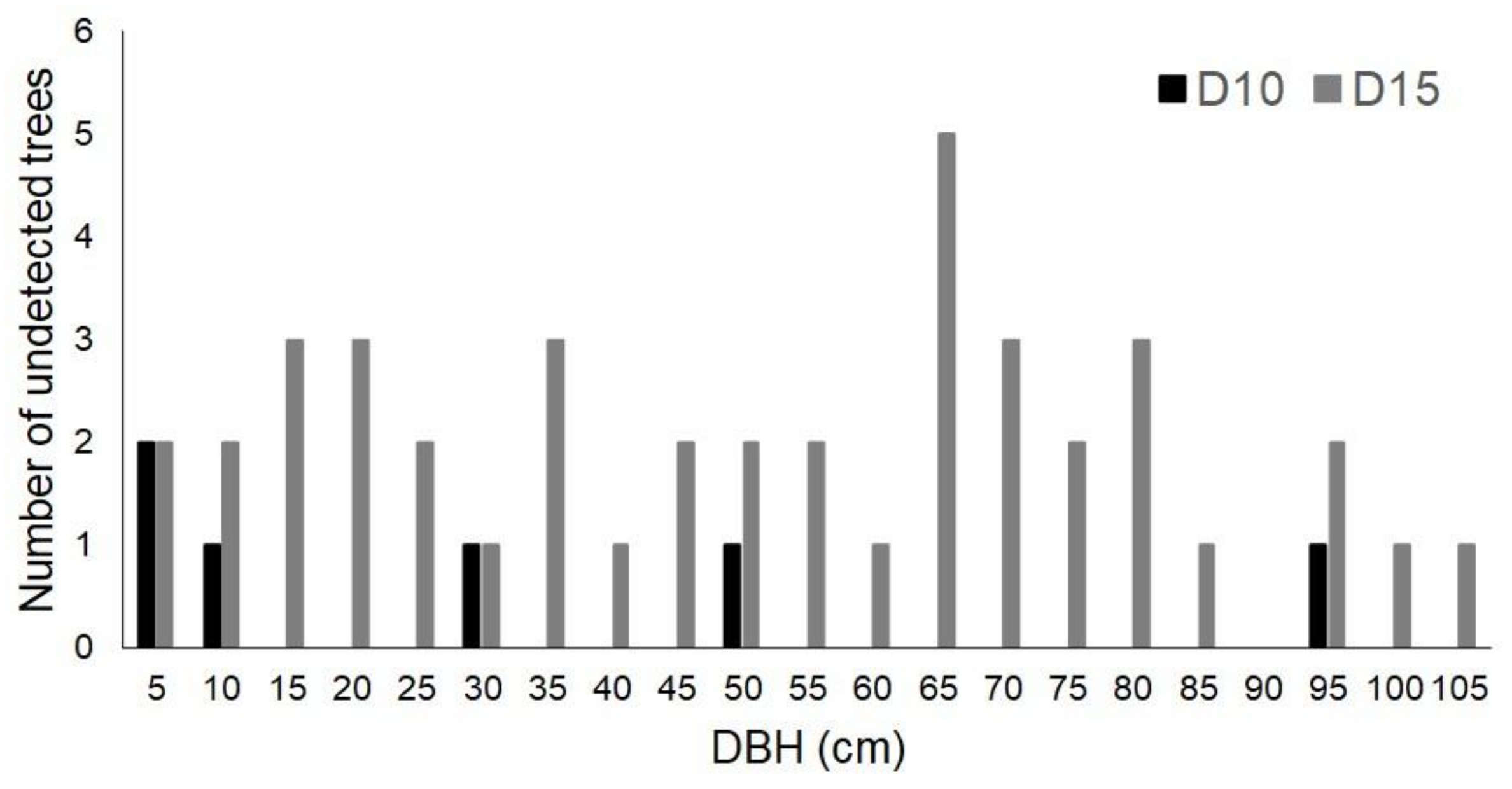
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Næsset, E.; Gobakken, T.; Holmgren, J.; Hyyppä, H.; Hyyppä, J.; Maltamo, M.; Nilsson, M.; Olsson, H.; Persson, Å.; Söderman, U. Laser scanning of forest resources: the nordic experience. Scand. J. For. Res. 2004, 19, 482–499. [Google Scholar] [CrossRef]
- Tomppo, E.; Olsson, H.; Ståhl, G.; Nilsson, M.; Hagner, O.; Katila, M. Combining national forest inventory field plots and remote sensing data for forest databases. Remote Sens. Environ. 2008, 112, 1982–1999. [Google Scholar] [CrossRef]
- Corona, P.; Chirici, G.; McRoberts, R.E.; Winter, S.; Barbati, A. Contribution of large-scale forest inventories to biodiversity assessment and monitoring. For. Ecol. Manage. 2011, 262, 2061–2069. [Google Scholar] [CrossRef]
- Kangas, A.; Astrup, R.; Breidenbach, J.; Fridman, J.; Gobakken, T.; Korhonen, K.T.; Maltamo, M.; Nilsson, M.; Nord-Larsen, T.; Næsset, E.; et al. Remote sensing and forest inventories in Nordic countries – roadmap for the future. Scand. J. For. Res. 2018, 7581, 1–16. [Google Scholar] [CrossRef]
- Liang, X.; Kankare, V.; Hyyppä, J.; Wang, Y.; Kukko, A.; Haggrén, H.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Guan, F.; et al. Terrestrial laser scanning in forest inventories. ISPRS J. Photogramm. 2016, 115, 63–77. [Google Scholar] [CrossRef]
- Brosofske, K.D.; Froese, R.E.; Falkowski, M.J.; Banskota, A. A review of methods for mapping and prediction of inventory attributes for operational forest management. For. Sci. 2014, 60, 733–756. [Google Scholar] [CrossRef]
- Rahlf, J.; Breidenbach, J.; Solberg, S.; Næsset, E.; Astrup, R. Comparison of four types of 3D data for timber volume estimation. Remote Sens. Environ. 2014, 155, 325–333. [Google Scholar] [CrossRef]
- Miller, J.; Morgenroth, J.; Gomez, C. 3D modelling of individual trees using a handheld camera: Accuracy of height, diameter and volume estimates. Urban For. Urban Green. 2015, 14, 932–940. [Google Scholar] [CrossRef]
- Solberg, S.; Naesset, E.; Bollandsas, O.M. Single Tree Segmentation Using Airborne Laser Scanner Data in a Structurally Heterogeneous Spruce Forest. Photogramm. Eng. Remote Sens. 2006, 72, 1369–1378. [Google Scholar] [CrossRef]
- Wulder, M.A.; Bater, C.W.; Coops, N.C.; Hilker, T.; White, J. The role of LiDAR in sustainable forest management. For. Chron. 2008, 84, 807–826. [Google Scholar] [CrossRef]
- Hyyppä, J.; Kelle, O.; Lehikoinen, M.; Inkinen, M. A segmentation-based method to retrieve stem volume estimates from 3-D tree height models produced by laser scanners. IEEE Trans. Geosci. Remote Sens. 2001, 39, 969–975. [Google Scholar] [CrossRef]
- Yang, B.; Dai, W.; Dong, Z.; Liu, Y. Automatic Forest Mapping at Individual Tree Levels from Terrestrial Laser Scanning Point Clouds with a Hierarchical Minimum Cut Method. Remote Sens. 2016, 8, 372. [Google Scholar] [CrossRef]
- Bottalico, F.; Travaglini, D.; Chirici, G.; Marchetti, M.; Marchi, E.; Nocentini, S.; Corona, P. Classifying silvicultural systems (coppices vs. high forests) in mediterranean oak forests by airborne laser scanning data. Eur. J. Remote Sens. 2014, 47, 437–460. [Google Scholar] [CrossRef]
- Bottalico, F.; Chirici, G.; Giannini, R.; Mele, S.; Mura, M.; Puxeddu, M.; McRoberts, R.E.; Valbuena, R.; Travaglini, D. Modeling Mediterranean forest structure using airborne laser scanning data. Int. J. Appl. Earth Obs. Geoinf. 2017, 57, 145–153. [Google Scholar] [CrossRef]
- Mura, M.; McRoberts, R.E.; Chirici, G.; Marchetti, M. Estimating and mapping forest structural diversity using airborne laser scanning data. Remote Sens. Environ. 2015, 170, 133–142. [Google Scholar] [CrossRef]
- Mura, M.; McRoberts, R.E.; Chirici, G.; Marchetti, M. Statistical inference for forest structural diversity indices using airborne laser scanning data and the k-Nearest Neighbors technique. Remote Sens. Environ. 2016, 186, 678–686. [Google Scholar] [CrossRef]
- Kankare, V.; Liang, X.; Vastaranta, M.; Yu, X.; Holopainen, M.; Hyyppä, J. Diameter distribution estimation with laser scanning based multisource single tree inventory. ISPRS J. Photogramm. 2015, 108, 161–171. [Google Scholar] [CrossRef]
- Chirici, G.; McRoberts, R.E.; Fattorini, L.; Mura, M.; Marchetti, M. Comparing echo-based and canopy height model-based metrics for enhancing estimation of forest aboveground biomass in a model-assisted framework. Remote Sens. Environ. 2016, 174, 1–9. [Google Scholar] [CrossRef]
- Talbot, B.; Pierzchała, M.; Astrup, R. Applications of Remote and Proximal Sensing for Improved Precision in Forest Operations. Croat. J. For. Eng. 2016, 38, 327–336. [Google Scholar]
- Holopainena, M.; Kankarea, V.; Vastarantaa, M.; Liangb, X.; Linb, Y.; Vaajac, M.; Yub, X. Tree mapping using airborne, terrestrial and mobile laser scanning – A case study in a heterogeneous urban forest. Urban For. Urban Green 2013, 12, 546–553. [Google Scholar] [CrossRef]
- Zlot, R.; Bosse, M.; Greenop, K.; Jarzab, Z.; Juckes, E.; Roberts, J. Efficiently capturing large, complex cultural heritage sites with a handheld mobile 3D laser mapping system. J. Cult. Herit. 2014, 15, 670–678. [Google Scholar] [CrossRef]
- Hopkinson, C.; Chasmer, L.; Young-Pow, C.; Treitz, P. Assessing forest metrics with a ground-based scanning LiDAR. Can. J. Remote Sens. 2004, 34, 573–583. [Google Scholar] [CrossRef]
- Thies, M.; Pfeifer, N.; Winterhalder, D.; Gorte, B.G.H. Three-dimensional reconstruction of stems for assessment of taper, sweep, and lean based on laser scanning of standing trees. Scand. J. For. Res. 2004, 19, 571–581. [Google Scholar] [CrossRef]
- Maas, H.-G.; Bienert, A.; Scheller, S.; Keane, E. Automatic forest inventory parameter determination from terrestrial laser scanner data. Int. J. Remote Sens. 2008, 29, 1579–1593. [Google Scholar] [CrossRef]
- Oveland, I.; Hauglin, M.; Giannetti, F.; Kjørsvik, N.S.; Gobakken, T. Comparing three different ground based laser scanning methods for tree stem detection. Remote Sens. 2018, 10, 538. [Google Scholar] [CrossRef]
- Dassot, M.; Constant, T.; Fournier, M. The use of terrestrial LiDAR technology in forest science: Application fields, benefits and challenges. Ann. For. Sci. 2011, 68, 959–974. [Google Scholar] [CrossRef]
- Kuronen, M.; Henttonen, H.M.; Myllymäki, M. Correcting for nondetection in estimating forest characteristics from single-scan terrestrial laser measurements. Can. J. For. Res. 2019, 49, 96–103. [Google Scholar] [CrossRef]
- Liang, X.; Kukko, A.; Kaartinen, H. Possibilities of a personal laser scanning system for forest mapping and ecosystem services. Sensors 2014, 14, 1228–1248. [Google Scholar] [CrossRef]
- Ryding, J.; Williams, E.; Smith, M.; Eichhorn, M. Assessing handheld mobile laser scanners for forest surveys. Remote Sens. 2015, 7, 1095–1111. [Google Scholar] [CrossRef]
- Bauwens, S.; Bartholomeus, H.; Calders, K.; Lejeune, P. Forest Inventory with Terrestrial LiDAR: A Comparison of Static and Hand-Held Mobile Laser Scanning. Forests 2016, 7, 127. [Google Scholar] [CrossRef]
- Forsman, M.; Holmgren, J.; Olofsson, K. Tree Stem Diameter Estimation from Mobile Laser Scanning Using Line-Wise Intensity-Based Clustering. Forests 2016, 7, 206. [Google Scholar] [CrossRef]
- Bosse, M.; Zlot, R.; Flick, P. Zebedee: Design of a spring-mounted 3-d range sensor with application to mobile mapping. IEEE Trans. Robot 2012, 28, 1104–1119. [Google Scholar] [CrossRef]
- Giannetti, F.; Puletti, N.; Quatrini, V.; Travaglini, D.; Bottalico, F.; Corona, P.; Chirici, G. Integrating terrestrial and airborne laser scanning for the assessment of single tree attributes in Mediterranean forest stands. Eur. J. Remote Sens. 2018, 51, 795–807. [Google Scholar] [CrossRef]
- GEOSLAM. User Manual; GeoSLAM Ltd.: Den Haag, The Nederland, 2017. [Google Scholar]
- Giannetti, F.; Chirici, G.; Travaglini, D.; Bottalico, F.; Marchi, E.; Cambi, M. Assessment of Soil Disturbance Caused by Forest Operations by Means of Portable Laser Scanner and Soil Physical Parameters. Soil Sci. Soc. Am. J. 2017, 81, 1577–1585. [Google Scholar] [CrossRef]
- Hackenberg, J.; Spiecker, H.; Calders, K.; Disney, M.; Raumonen, P. SimpleTree–An efficient open source tool to build tree models from TLS Clouds. Forests 2015, 6, 4245–4294. [Google Scholar] [CrossRef]
- Liang, X.; Hyyppä, J. Automatic stem mapping by merging several terrestrial laser scans at the feature and decision levels. Sensors 2013, 13, 1614–1634. [Google Scholar] [CrossRef] [PubMed]
- Bertini, R.; Faini, A.; Montaghi, A.; Puletti, N.; Travaglini, D. (In Italian) Methodology for the census and mapping of chestnut forests. In III Congresso Nazionale di Selvicoltura, Taormina, Italy, 16-19 ottobre 2008, Accademia Italiana di Scienze Forestali, vol. Atti del III Congresso Nazionale di Selvicoltura per il miglioramento e la conservazione dei boschi italiani, 16-19 ottobre 2008 – Taormina (Messina); Accademia Italiana di Scienze Forestali: Florence, Italy, 2009; Volume 3, pp. 1455–1461. ISBN 9788887553161. [Google Scholar]
- Maltoni, A.; Mariotti, B.; Jacobs, D.F.; Tani, A. Pruning methods to restore Castanea sativa stands attacked by Dryocosmus kuriphilus. New For. 2012, 43, 869–885. [Google Scholar] [CrossRef]
- Piccioli, L. Monografia del Castagno (In Italian), 2nd ed.; Stab. Tipo-Litografico G. Spinelli & C.: Florence, Italy, 1922; p. 397. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature | Description |
|---|---|
| Laser scanner sensor | 905-nm wavelength and a beam divergence of approximately 7 mrad. |
| Weight | Hand-held sensor, 0.7 kg. Data logger in backpack, 3.6 kg. |
| Frequency of scanning | 43,200 points/s (40 lines/s with a laser pulse interval of 0.25°). |
| Field of view | Horizontally 270°. Vertically 120°. |
| Measurement error | ±30 mm at a range of 0.1 m to 10 m. |
| Path Scan | Length of Walking Path (m) | Scan Time (min) | Extraction of Single-Tree Data (min) | Pre-Processing Cost (€) | Average Time/ha (min/ha) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Area | Area | Area | Area | ||||||||||
| 1 | 2 | 3 | 1 | 2 | 3 | 1 | 2 | 3 | 1 | 2 | 3 | ||
| D0 | 956 | 842 | 828 | 17 | 15 | 13 | 58 | 56 | 53 | 93 | 89 | 76 | 250 |
| D10 | 722 | 721 | 704 | 15 | 14 | 12 | 49 | 45 | 46 | 72 | 75 | 69 | 213 |
| D15 | 621 | 602 | 592 | 12 | 11 | 8 | 38 | 31 | 33 | 52 | 48 | 41 | 157 |
| Area | Number of Trees | Omission Difference (%) | |||
|---|---|---|---|---|---|
| D0 | D10 | D15 | D10 | D15 | |
| 1 | 37 | 37 | 24 | 0 | 35 |
| 2 | 25 | 25 | 12 | 0 | 52 |
| 3 | 36 | 30 | 20 | 17 | 44 |
| All | 98 | 92 | 56 | 6 | 43 |
| Area | RMSE | Bias | ||
|---|---|---|---|---|
| D10 | D15 | D10 | D15 | |
| 1 | 0.001 | 0.005 | 0.000 | −0.001 |
| 2 | 0.139 | 0.244 | −0.015 | −0.024 |
| 3 | 0.097 | 0.136 | 0.009 | 0.007 |
| All | 0.091 | 0.139 | −0.001 | −0.003 |
| Single-Tree Attribute | Area | R2 | RMSE | RMSE% | Bias | ||||
|---|---|---|---|---|---|---|---|---|---|
| D10 | D15 | D10 | D15 | D10 | D15 | D10 | D15 | ||
| DBH (cm) | 1 | 0.983 | 0.981 | 0.768 | 2.544 | 0.002 | 5.240 | 0.001 | −0.100 |
| 2 | 0.975 | 0.979 | 3.919 | 3.993 | 6.208 | 7.028 | 0.362 | 1.578 | |
| 3 | 0.995 | 0.994 | 2.381 | 2.589 | 5.032 | 5.445 | −0.981 | −0.430 | |
| All | 0.991 | 0.986 | 2.451 | 2.930 | 4.775 | 5.864 | −0.222 | 0.142 | |
| TH (m) | 1 | 0.984 | 0.945 | 0.534 | 0.644 | 4.534 | 5.359 | 0.286 | 0.309 |
| 2 | 0.913 | 0.980 | 0.704 | 0.296 | 6.893 | 3.042 | 0.308 | 0.163 | |
| 3 | 0.879 | 0.929 | 0.984 | 1.143 | 11.544 | 12.639 | 0.259 | 0.777 | |
| All | 0.952 | 0.943 | 0.671 | 0.814 | 6.523 | 7.781 | 0.168 | 0.445 | |
| CBH (m) | 1 | 1.000 | 0.958 | 0.198 | 0.272 | 7.024 | 9.762 | −0.015 | −0.209 |
| 2 | 0.917 | 0.660 | 0.255 | 0.804 | 8.771 | 26.280 | −0.140 | −0.463 | |
| 3 | 0.862 | 0.958 | 0.474 | 0.453 | 19.625 | 18.217 | −0.298 | −0.302 | |
| All | 0.915 | 0.872 | 0.302 | 0.494 | 11.126 | 18.016 | −0.135 | −0.297 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Del Perugia, B.; Giannetti, F.; Chirici, G.; Travaglini, D. Influence of Scan Density on the Estimation of Single-Tree Attributes by Hand-Held Mobile Laser Scanning. Forests 2019, 10, 277. https://doi.org/10.3390/f10030277
Del Perugia B, Giannetti F, Chirici G, Travaglini D. Influence of Scan Density on the Estimation of Single-Tree Attributes by Hand-Held Mobile Laser Scanning. Forests. 2019; 10(3):277. https://doi.org/10.3390/f10030277
Chicago/Turabian StyleDel Perugia, Barbara, Francesca Giannetti, Gherardo Chirici, and Davide Travaglini. 2019. "Influence of Scan Density on the Estimation of Single-Tree Attributes by Hand-Held Mobile Laser Scanning" Forests 10, no. 3: 277. https://doi.org/10.3390/f10030277
APA StyleDel Perugia, B., Giannetti, F., Chirici, G., & Travaglini, D. (2019). Influence of Scan Density on the Estimation of Single-Tree Attributes by Hand-Held Mobile Laser Scanning. Forests, 10(3), 277. https://doi.org/10.3390/f10030277