
A State Recognition Approach for Complex Equipment Based on a Fuzzy Probabilistic Neural Network


Abstract
:1. Introduction
2. Literature Review
2.1. State Recognition
2.2. Fuzzy Probabilistic Neural Network
2.3. Discussion
3. The Proposed Approach
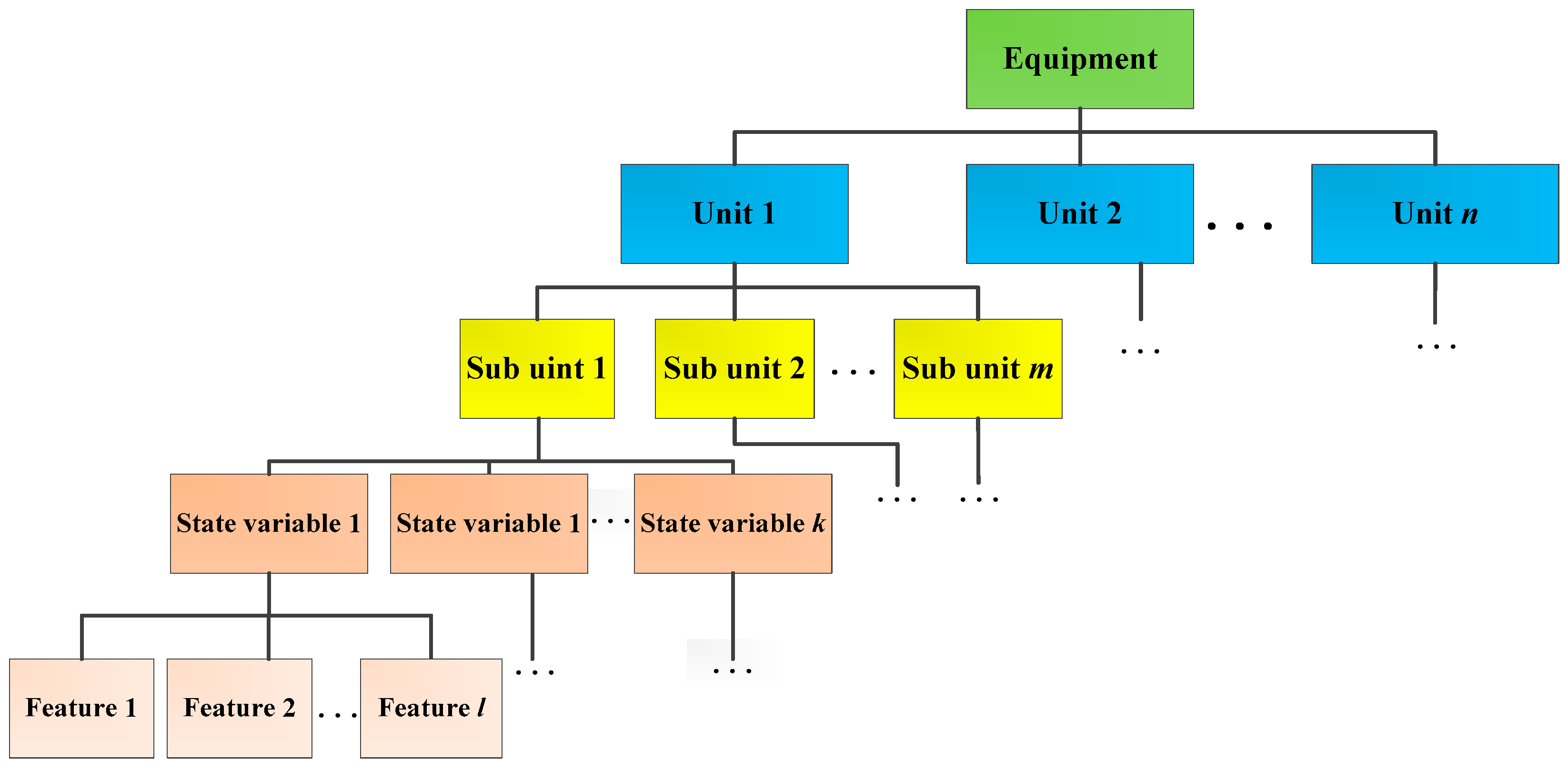
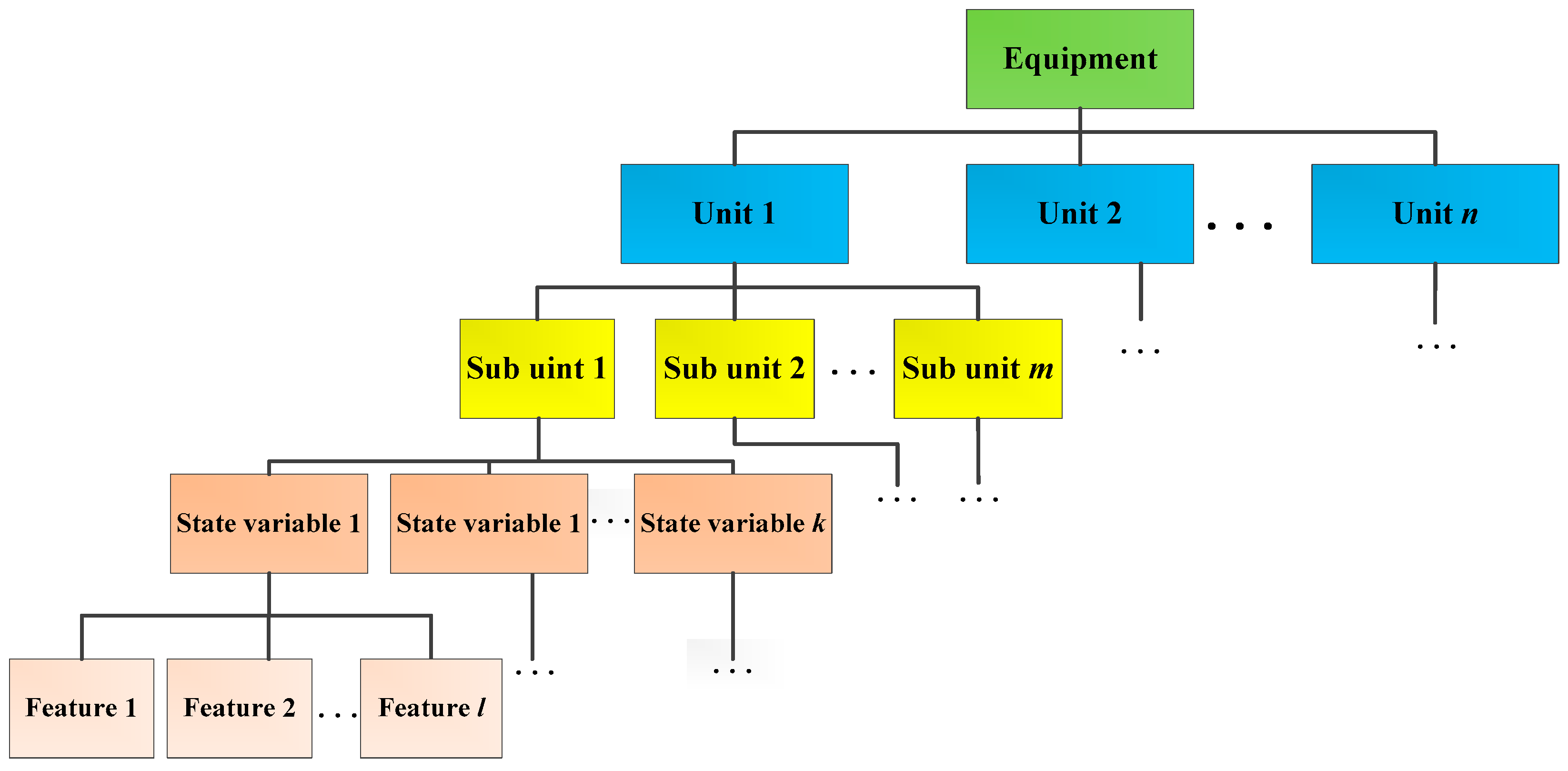
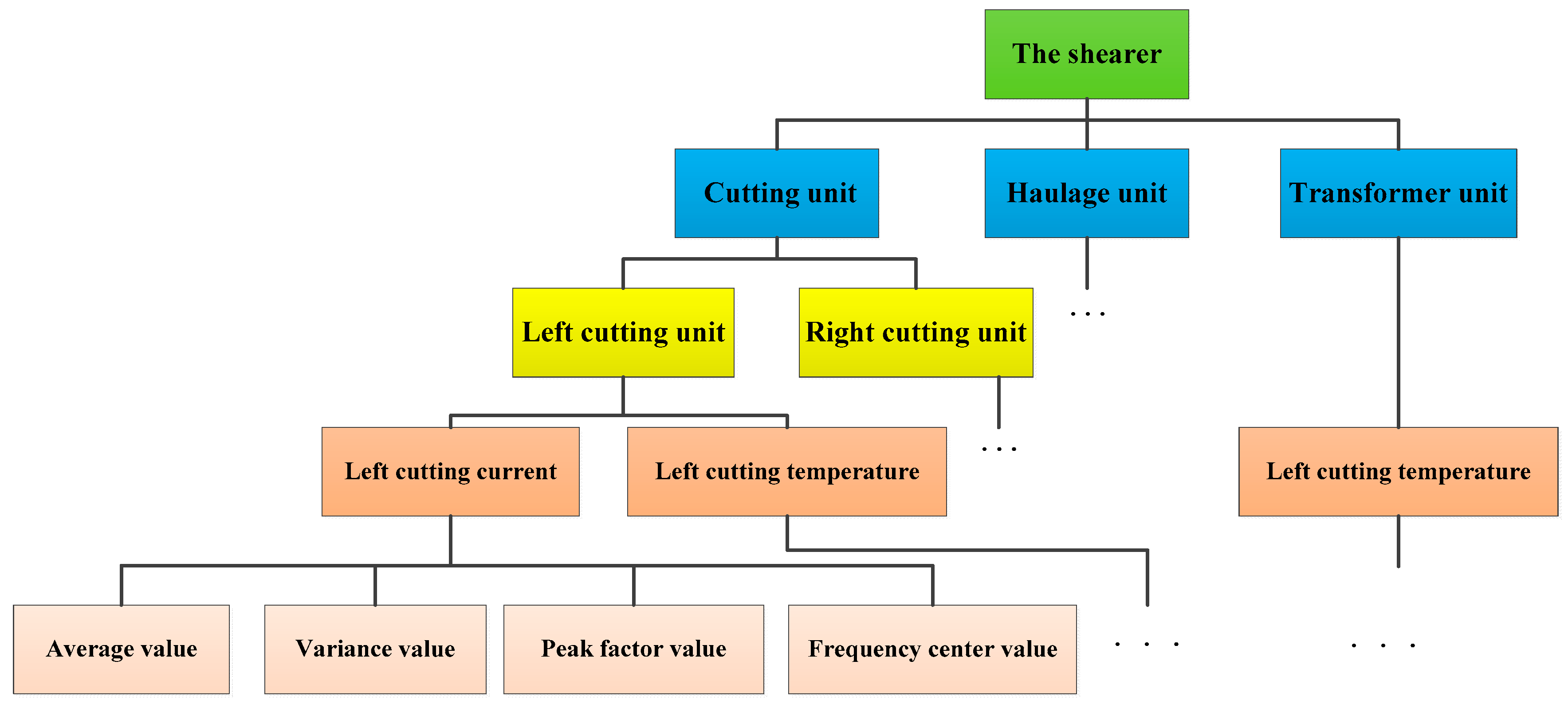
3.1. Construction of the Multi-Level State Space
- Rule 1: IF f_1 is NB, and f_2 is NB,..., and f_l is NB, THEN P is p_1,
- Rule 2: IF f_1 is NB, and f_2 is NB,..., and f_l is NM, THEN P is p_2,
- Rule 3: IF f_1 is NB, and f_2 is NB,..., and f_l is NS, THEN P is p_3,
- ......
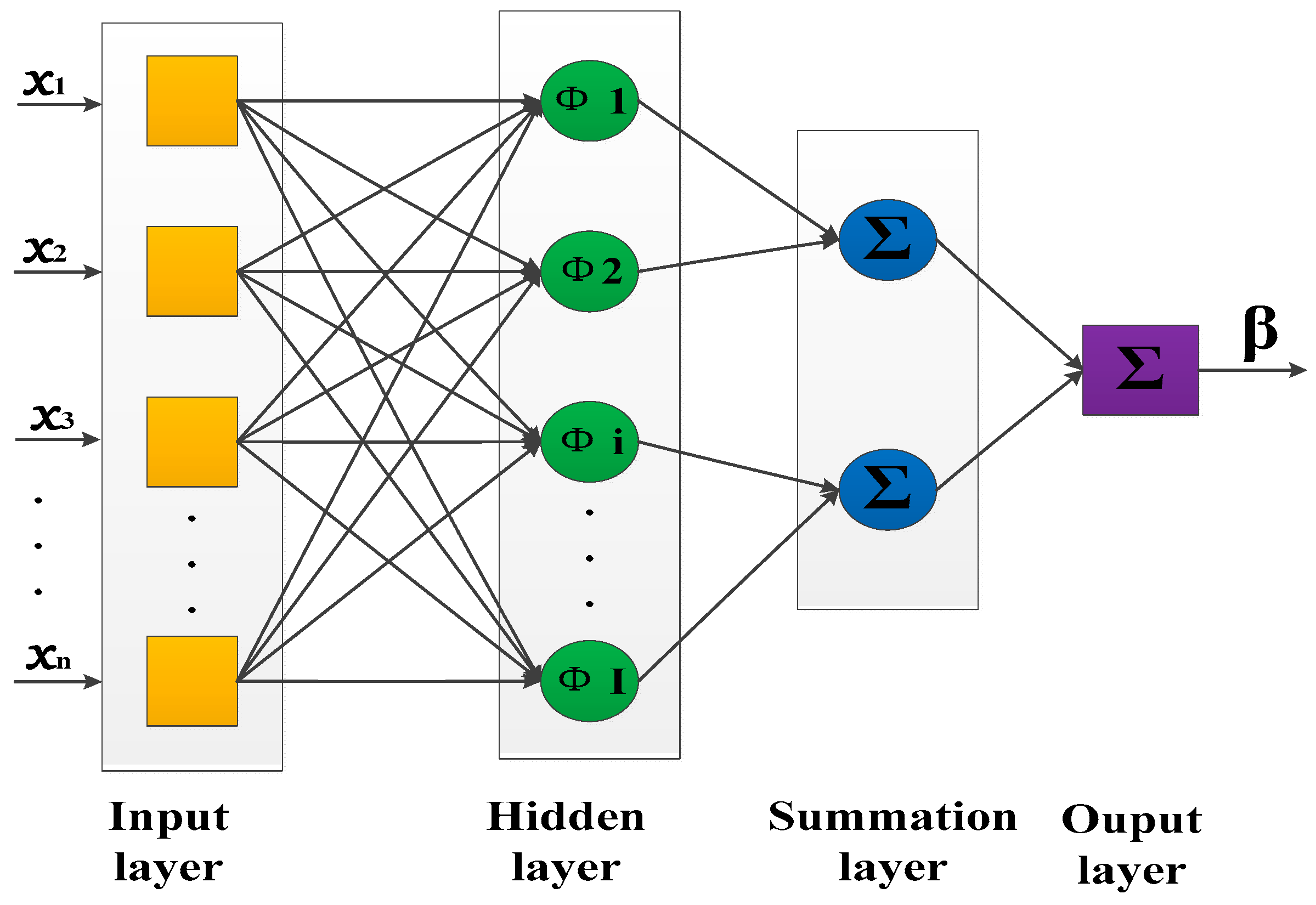
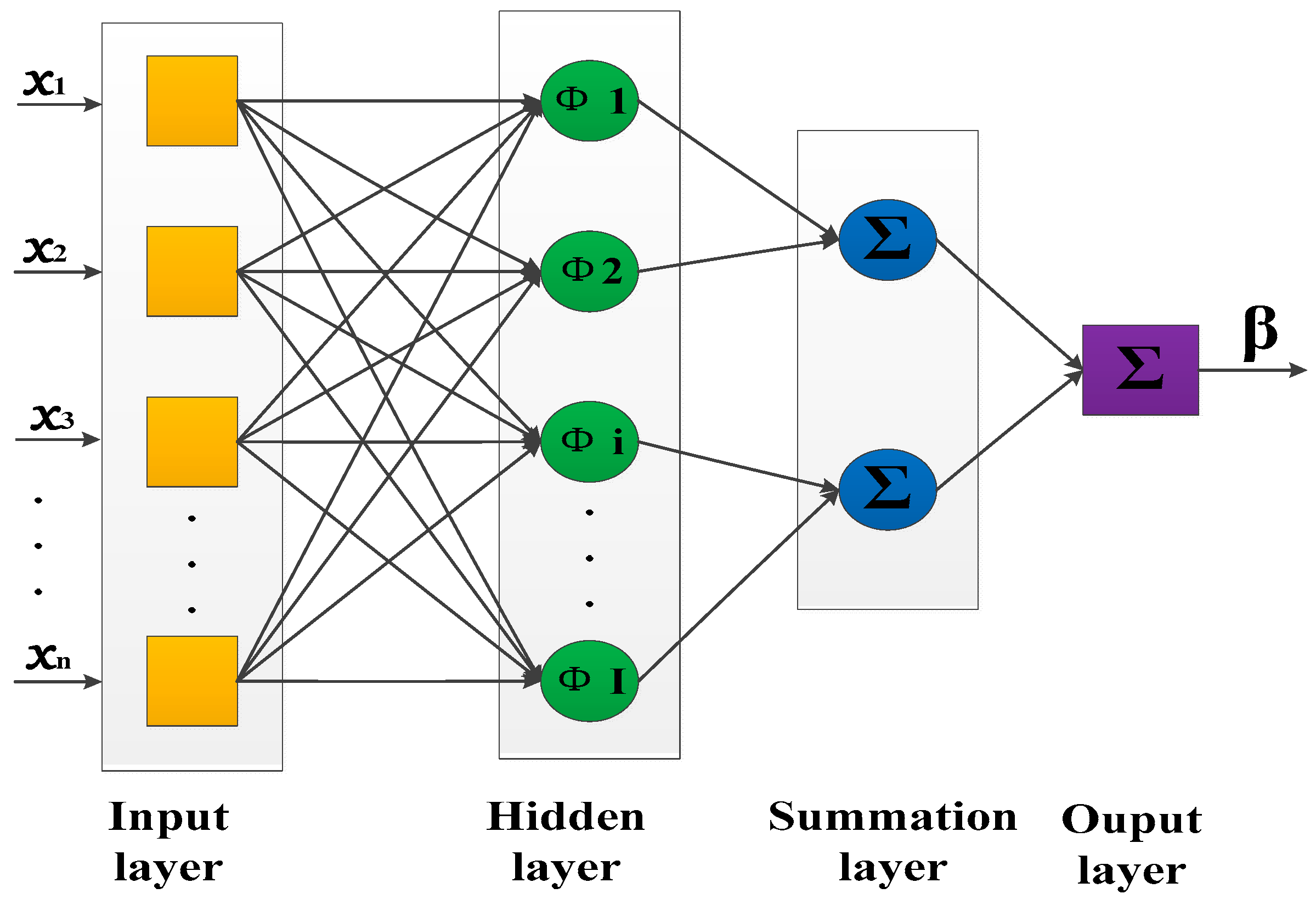
3.2. Probabilistic Neural Network
3.3. Fuzzy Functions and Quantification Matrix
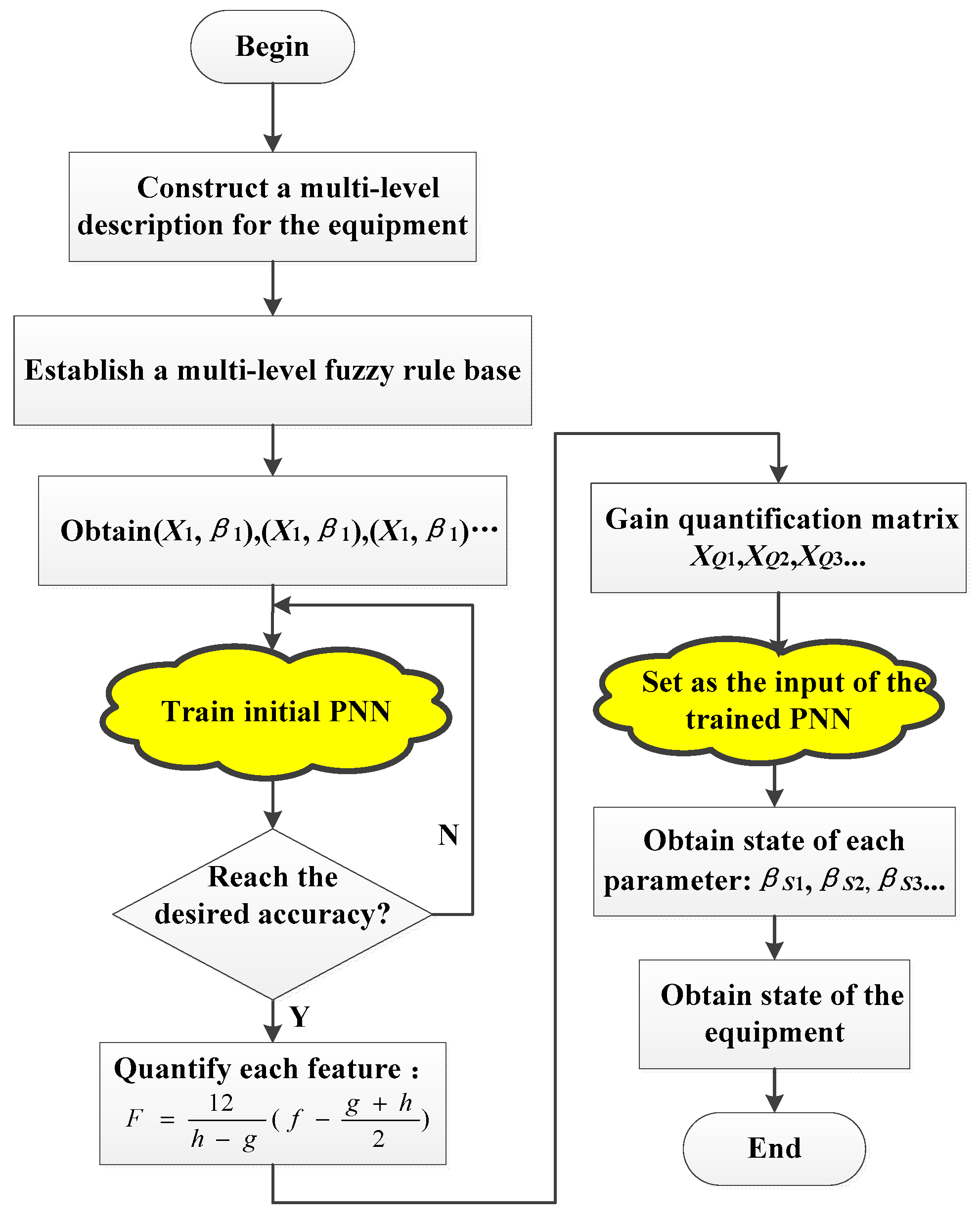
3.4. The State Recognition Flow
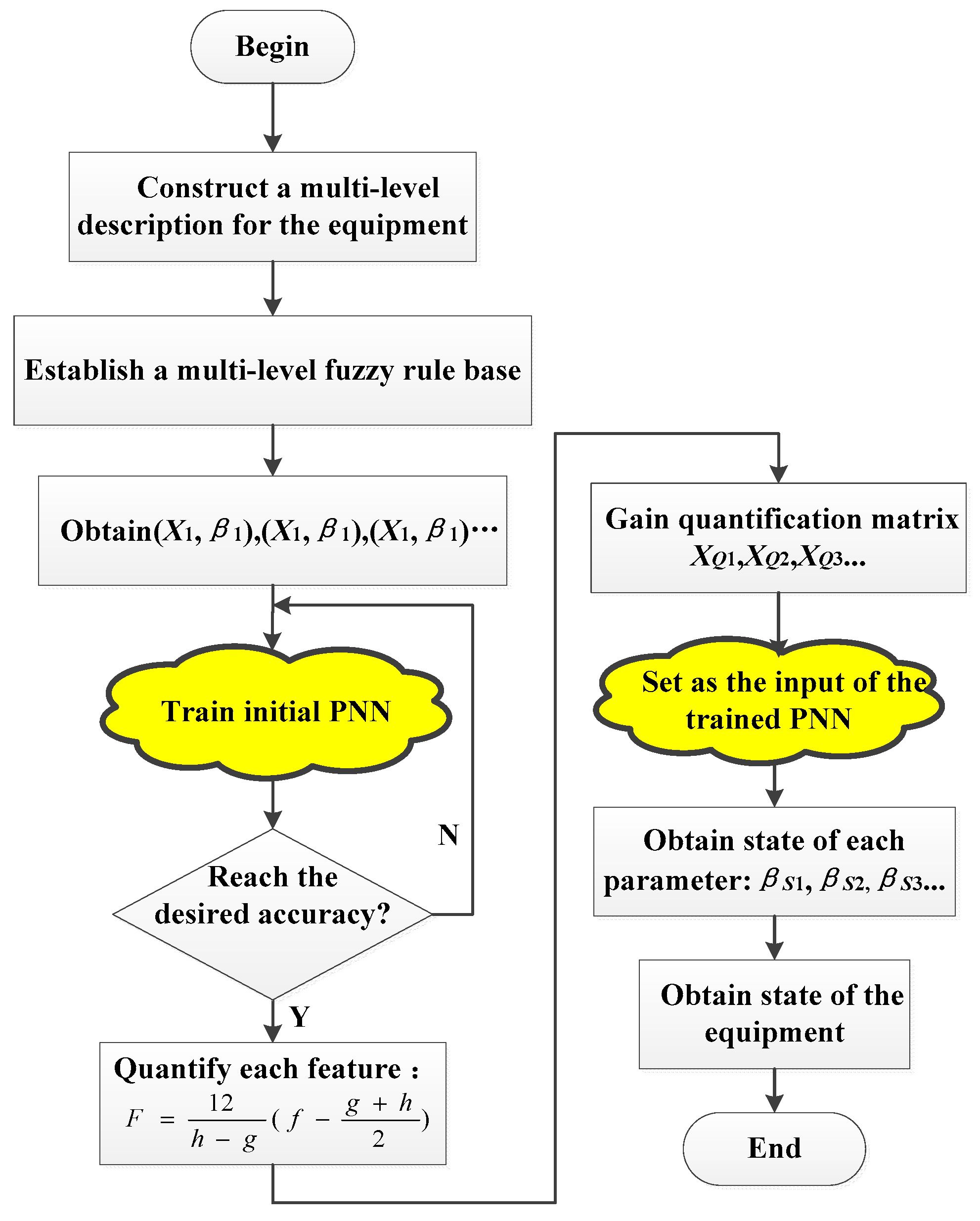
- (a)
- According to the structural characteristics of the equipment, a multi-level description for the equipment is constructed, and a bottom-up rule base is established based on preliminary statistic data and expert experience.
- (b)
- A feature matrix is set up for each state variable on the basis of the established rule base. Each matrix is the state set of the corresponding variable and can be divided into training rows and testing rows.
- (c)
- The desired recognition accuracy is set up before the training. Then, the initial smoothing factor and iteration number are designated, and the two parameters are adjusted according to the training processing. Initial PNN is trained by the training rows and the training effect is justified by the testing rows.
- (d)
- For an arbitrary group of field data, quantification is conducted by the fuzzy functions, so the data can be extracted as a feature vector. The vector is the input of the trained PNN, and the state of each variable can be obtained according to the trained PNN.
- (e)
- The state of each sub-unit, unit and the whole equipment are acquired by the established bottom-up rule base.
4. Simulation Example
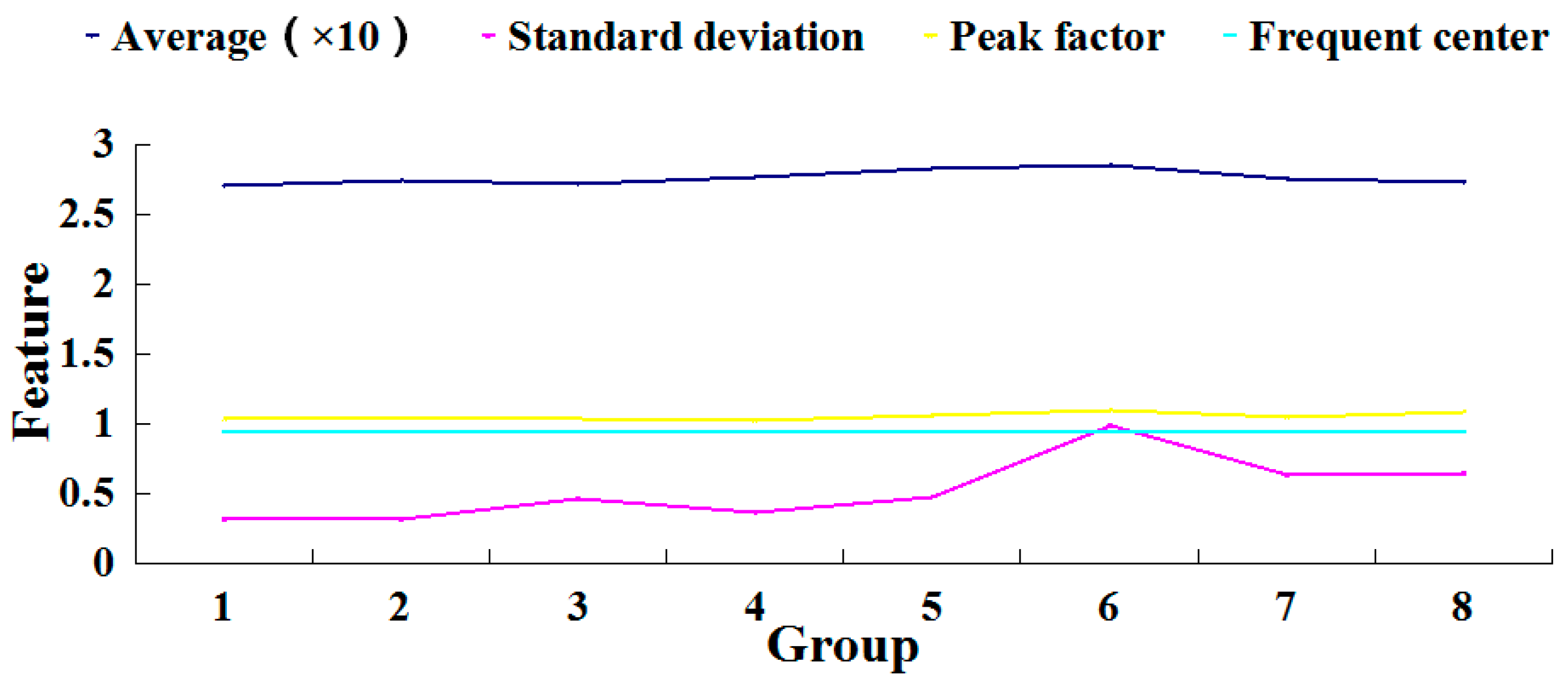
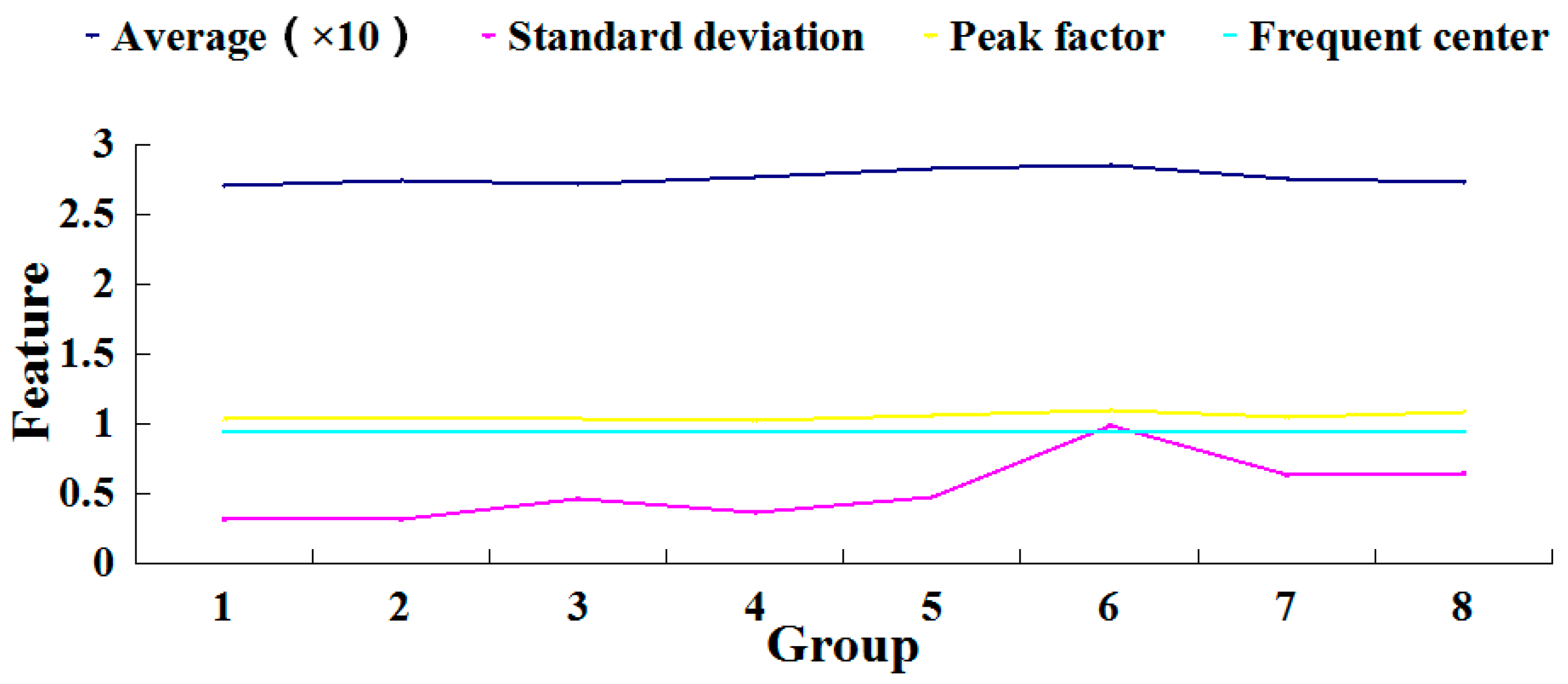
4.1. Constructing the Multi-Level State Space and Training PNN
- Rule 1: If A is LC_A_RS, S is LC_S_NM, P is LC_P_RS and F is LC_F_NM, Then LC is LC_RST,
- Rule 2: If A is LC_A_RS, S is LC_S_NM, P is LC_P_RS and F is LC_F_AN, Then LC is LC_FT,
- Rule 3: If A is LC_A_RS, S is LC_S_NM, P is LC_P_NM and F is LC_F_NM, Then LC is LC_VST,
- Rule 4: If A is LC_A_RS, S is LC_S_NM, P is LC_P_NM and F is LC_F_AN, Then LC is LC_RST,
- ......
- Rule 46: If A is LC_A_B, S is LC_S_RB, P is LC_P_NM and F is LC_F_AN, Then LC is LC_AN,
- Rule 47: If A is LC_A_B, S is LC_S_RB, P is LC_P_RB and F is LC_F_NM, Then LC is LC_AN,
- Rule 48: If A is LC_A_B, S is LC_S_RB, P is LC_P_RB and F is LC_F_AN, Then LC is LC_AN.
| Symbol | Meaning | Symbol | Meaning |
| LC_A_RS | The average value is relative small(RS) | LC_P_RB | The peak factor is relative big(RB) |
| LC_A_NM | The average value is normal(NM) | LC_F_NM | The frequency center is normal(NM) |
| LC_A_RB | The average value is relative big(RB) | LC_F_AN | The frequency center is abnormal(AN) |
| LC_A_B | The average value is big | LC_VST | The left cutting current is very stable(VST) |
| LC_S_NM | The stand deviation is normal(NM) | LC_ST | The left cutting current is stable(ST) |
| LC_S_RB | The stand deviation is relative big(RB) | LC_RST | The left cutting current is relative stable(RST) |
| LC_P_RS | The peak factor is relative small(RS) | LC_FT | The left cutting current is fluctuant(FT) |
| LC_P_NM | The peak factor is normal(NM) | LC_AN | The left cutting current is abnormal(AN) |
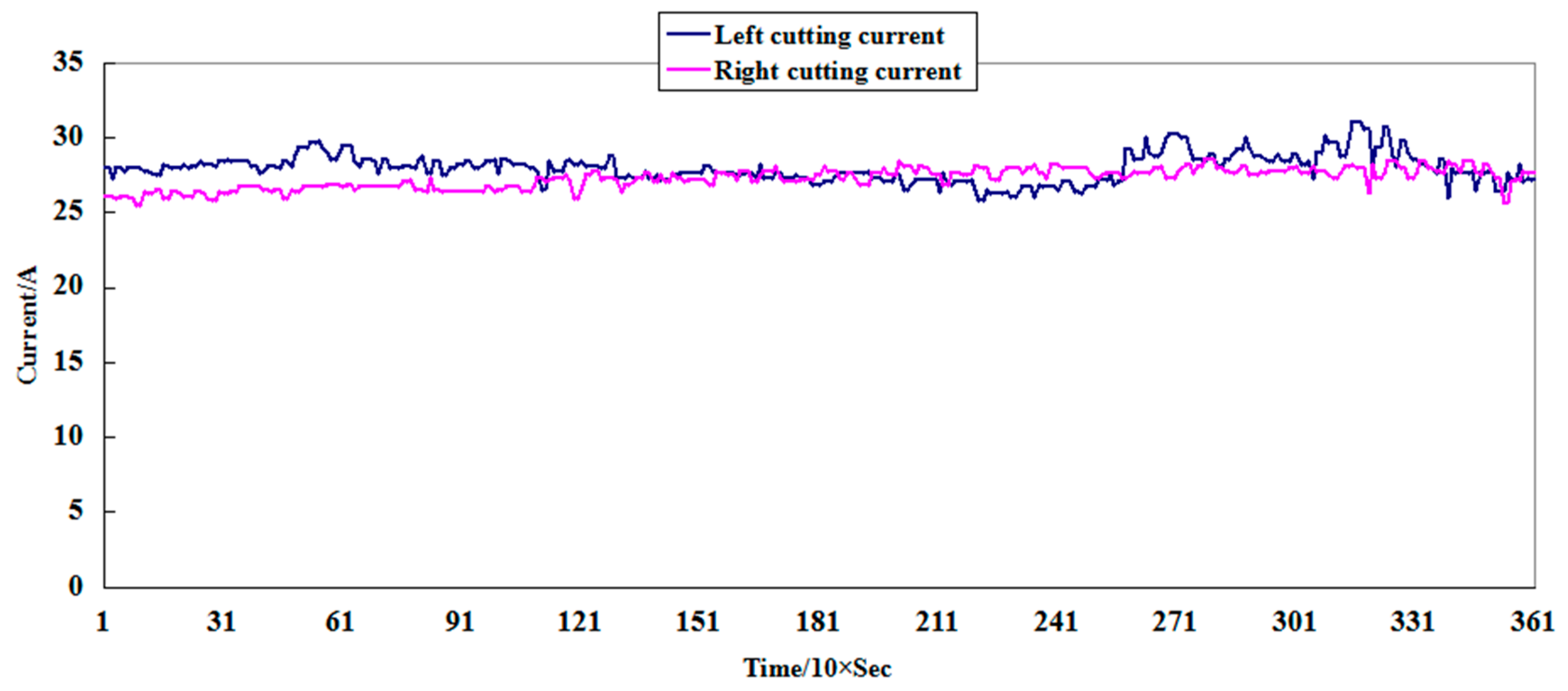
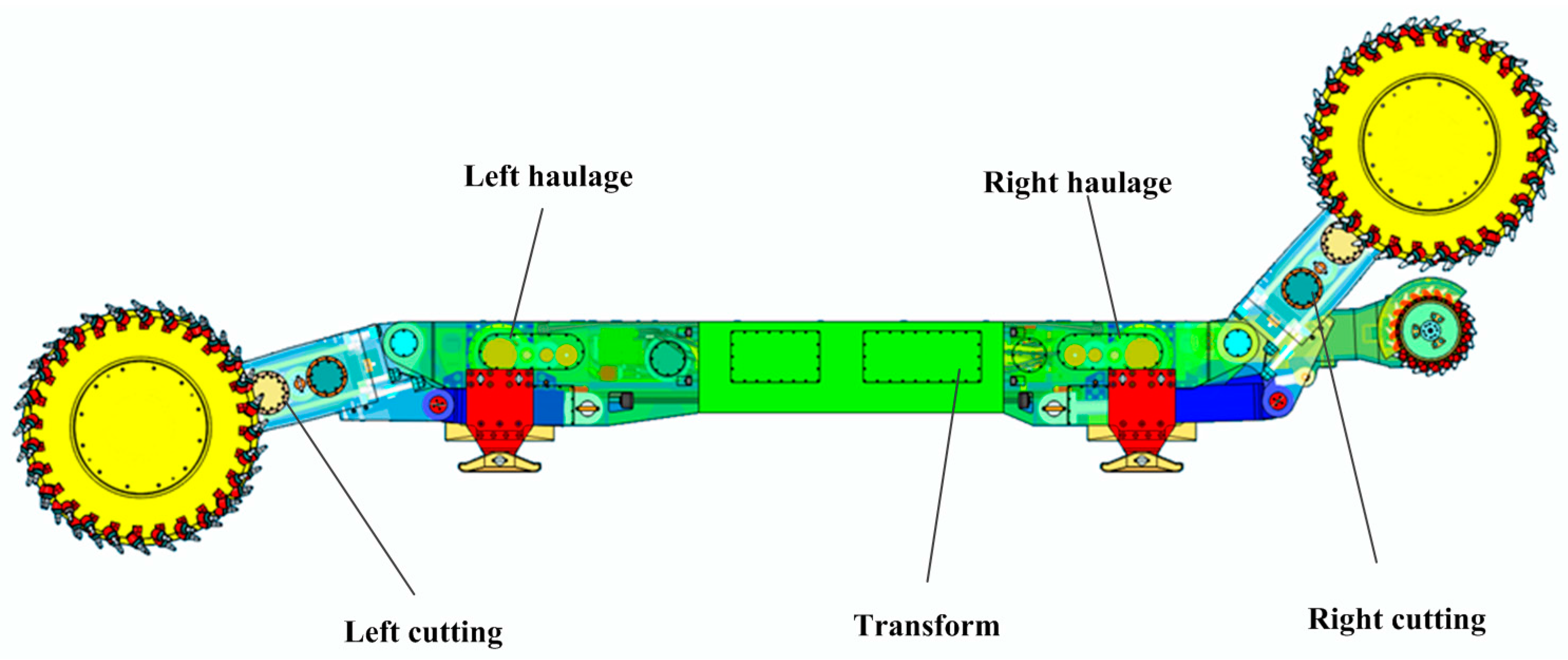
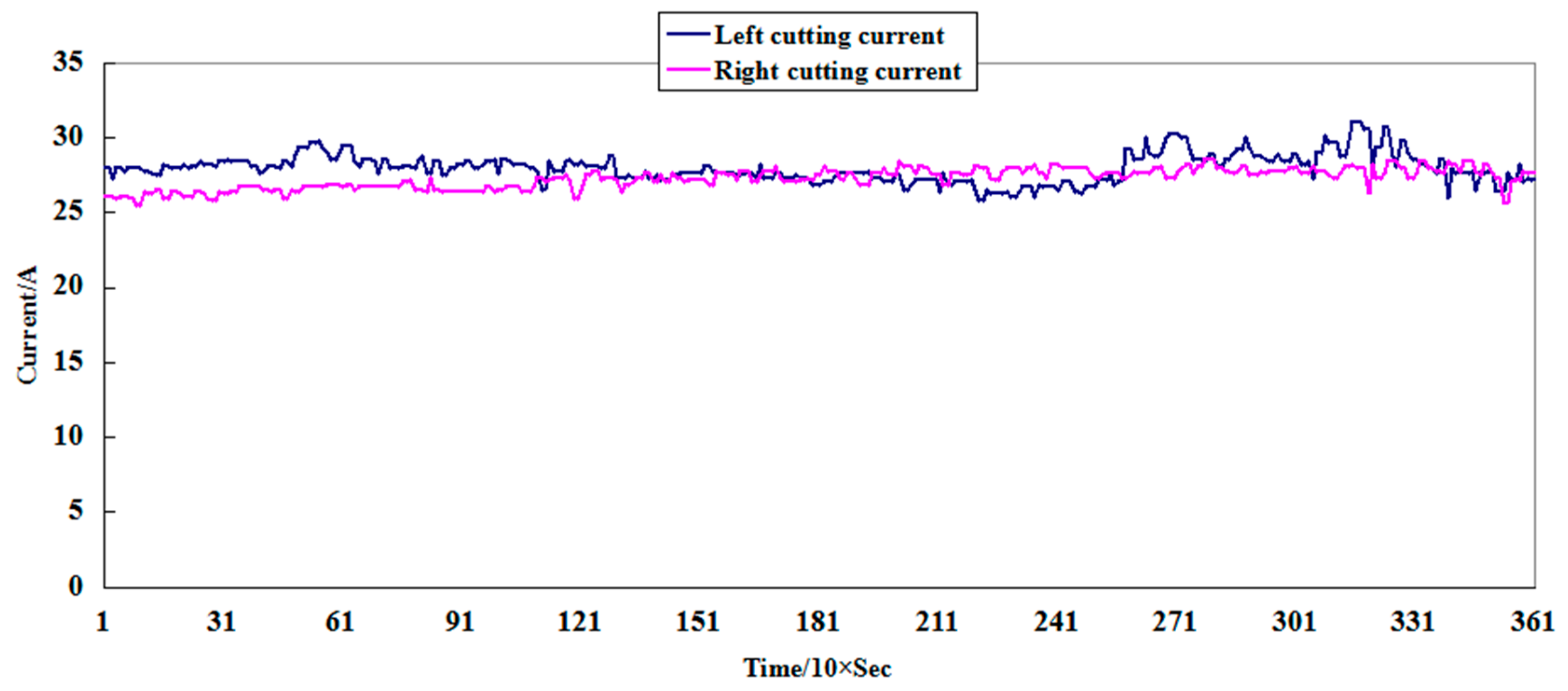
4.2. Recognizing State of the Shearer
| Parameters | State Set |
| Left cutting current | LCC_RST, LCC_RST, LCC_RST, LCC_RST, LCC_RST, LCC_RST, LCC_RST, LCC_RST |
| Left cutting temperature | LCT_N, LCT_N, LCT_N, LCT_N, LCT_N, LCT_N, LCT_N, LCT_N |
| Right cutting current | RCC_RST, RCC_RST, RCC_RST, RCC_RST, RCC_RST, RCC_RST, RCC_RST, RCC_RST |
| Right cutting temperature | RCT_N,RCT_N, RCT_N, RCT_N, RCT_N, RCT_N, RCT_N, RCT_N |
| Left haulage current | LHC_RST, LHC_RST, LHC_RST, LHC_FT, LHC_FT, LHC_RST, LHC_FT, LHC_FT |
| Left haulage temperature | LHT_N, LHT_N, LHT_N, LHT_N, LHT_N, LHT_N, LHT_N, LHT_N |
| Right haulage current | LHC_RST, LHC_RST, LHC_RST, LHC_RST, LHC_FT, LHC_RST, LHC_RST, LHC_RST |
| Right haulage temperature | RHT_N, RHT_N, RHT_N, RHT_N, RHT_N, RHT_N, RHT_N, RHT_N |
| Transport temperature | TT_N, TT_N, TT_N, TT_N, TT_N, TT_N, TT_N, TT_N |
| Symbol | Meaning |
| SH_N | State of the shearer is normal |
| SH_AL | State of the shearer is alarm |
| SH_F | State of the shearer is fault |
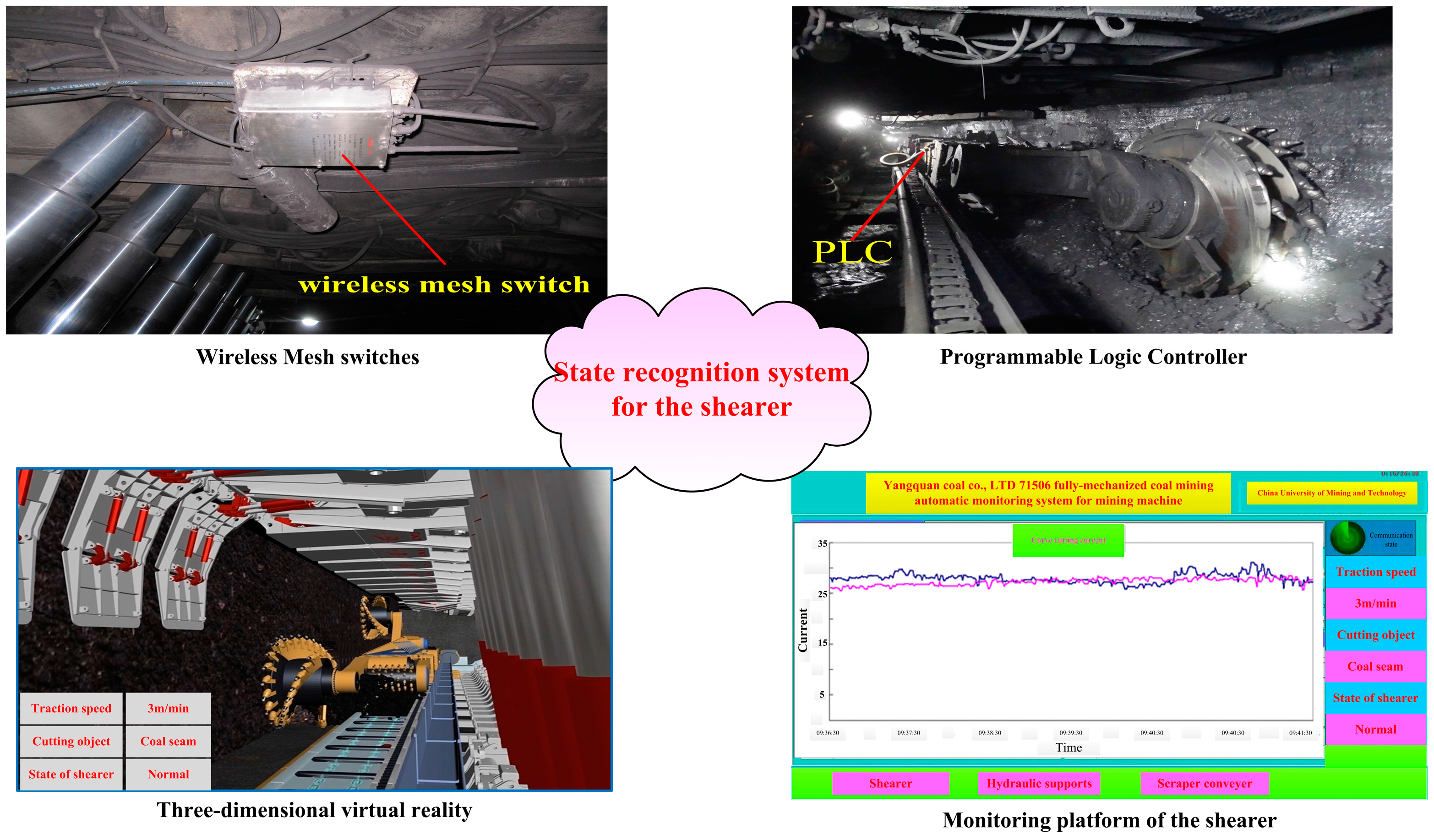
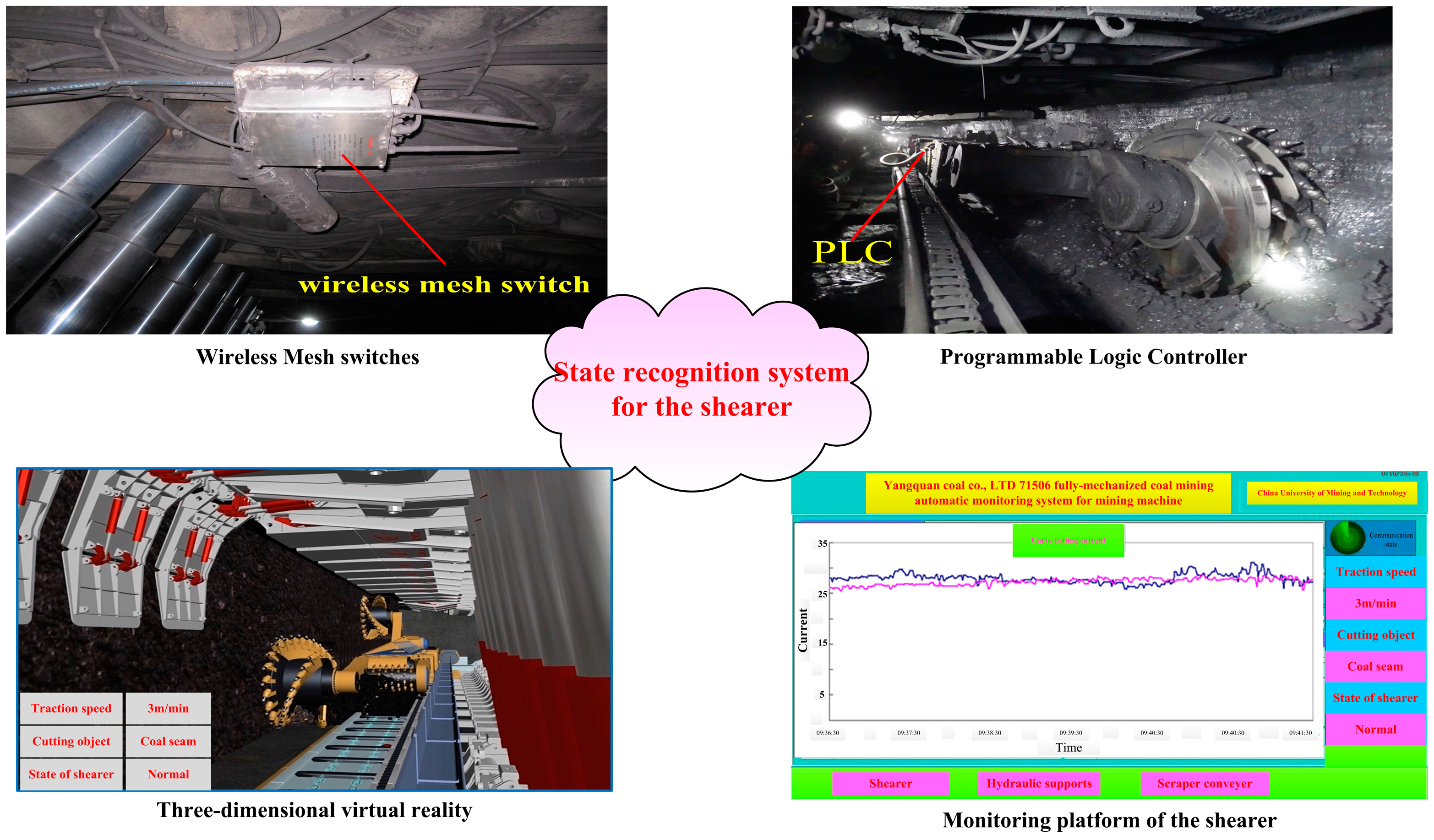
5. Industrial Application
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wang, N.; Sun, S.D.; Li, S.M.; Cai, Z.Q. Equipment state recognition and fault prognostics method based on DD-HSMM model. Comput. Integr. Manuf. Syst. 2012, 18, 1861–1868. [Google Scholar]
- Zeng, Q.H.; Qiu, J.; Liu, G.Q. Equipment degradation state recognition and fault prognosis method based on wavelet correlation feature scale entropy and HSMM. Chin. J. Sci. Instrum. 2008, 29, 2559–2564. [Google Scholar]
- Gu, L.C.; Liu, P.J.; Chen, J.C. State recognition technique of hydraulic system based on electrical parameters information fusion. Jixie Gongcheng Xuebao 2011, 47, 141–150. [Google Scholar] [CrossRef]
- Wang, W.C.; Chau, K.W.; Xu, D.M.; Chen, X.Y. Improving Forecasting Accuracy of Annual Runoff Time Series Using ARIMA Based on EEMD Decomposition. Water Resour. Manag. 2015, 29, 2655–2675. [Google Scholar] [CrossRef]
- Huang, Q.; Ouyang, X.Z.; Huang, Q.P. The state recognition for rotary machines based on fractal theory and neural network. Appl. Mech. Mater. 2013, 404, 485–489. [Google Scholar] [CrossRef]
- Zhang, J.; Chau, K.W. Multilayer Ensemble Pruning via Novel Multi-Sub-Swarm Particle Swarm Optimization. J. Univ. Comput. Sci. 2009, 15, 840–858. [Google Scholar]
- Yang, J.X.; Zhou, J.T.; Chen, Y. Study on state recognition of ASCE benchmark based on lyapunov exponent spectrum entropy. Adv. Mater. Res. 2011, 243, 5435–5439. [Google Scholar] [CrossRef]
- Ding, Q.; Peng, Z.H.; Liu, T.Z.; Tong, Q.H. Multi-sensor building fire alarm system with information fusion technology based on D-S evidence theory. Algorithms 2014, 7, 523–537. [Google Scholar] [CrossRef]
- Luo, R.C.; Chang, C.C.; Lai, C.C. Multisensor fusion and integration: Theories, applications, and its perspectives. IEEE Sens. J. 2011, 11, 3122–3138. [Google Scholar] [CrossRef]
- Wang, G.H.; Liu, Y.; Xiong, C.Q. An optimization clustering algorithm based on texture feature fusion for color image segmentation. Algorithms 2015, 8, 234–247. [Google Scholar] [CrossRef]
- Francois, Y.; Grandvalet, T.; Deneux, C.; Roger, J.M. Resample and combine: An approach to improving uncertainty representation in evidential pattern classification. Inform. Fusion 2003, 4, 75–85. [Google Scholar] [CrossRef]
- Zhang, S.W.; Chau, K.W. Dimension Reduction Using Semi-Supervised Locally Linear Embedding for Plant Leaf Classification. Lect. Notes Comput. Sci. 2009, 5754, 948–955. [Google Scholar]
- Mohamed, E.A.; Abdelaziz, A.; Mostafa, A.S. A neural network-based scheme for fault diagnosis of power transformers. Electr. Power Syst. Res. 2005, 75, 29–39. [Google Scholar] [CrossRef]
- Taormina, R.; Chau, K.W. Data-driven input variable selection for rainfall-runoff modeling using binary-coded particle swarm optimization and Extreme Learning Machines. J. Hydrol. 2015, 529, 1617–1632. [Google Scholar] [CrossRef]
- Liu, C.T.; Chen, X.G. Study on operating status recognition and fault diagnosis for net crude-oil tank. Chin. J. Sci. Instrum. 2007, 28, 703–707. [Google Scholar]
- Zeng, Q.H.; Qiu, J.; Liu, G.J. Application of hidden semi-markov models based on wavelet correlation feature scale entropy in equipment degradation state recognition. In Proceedings of the 7th World Congress on Intelligent Control and Automation, Chongqing, China, 25–27 June 2008.
- Teng, H.Z.; Jia, X.S.; Zhao, J.M.; Zhang, X.H.; Wang, Z.G.; Ge, J.Y. Research on gearbox state recognition based on hierarchical hidden Markov model. China Mech. Eng. 2011, 22, 2175–2181. [Google Scholar]
- Li, J.H.; Jin, W.D.; Xiong, L.Y. Running state recognition of high-speed train based on fuzzy grey correlation analysis. J. Vib. Shock 2014, 33, 188–193. [Google Scholar]
- Niu, Q.F.; Wang, L. Working condition recognition of screw compressor using wavelets theory. In Proceedings of the 7th World Congress on Intelligent Control and Automation, Chongqing, China, 25–27 June 2008.
- Qu, J.X.; Zhang, Z.S.; Wen, J.P. State recognition of the viscoelastic sandwich structure based on the adaptive redundant second generation wavelet packet transform, permutation entropy and the wavelet support vector machine. Smart Mate. Struct. 2014, 23, 650–661. [Google Scholar] [CrossRef]
- Niu, Q.; Xia, S.X.; Zhou, Y.; Zhang, L. Fault condition recognition of mine hoist combining kernel PCA and SVM. In Proceedings of the IEEE International Conference on Integration Technology, Shenzhen, China, 20–24 March 2007.
- Nie, P.; Chen, X.; Xu, T.; Sun, B.L. State recognition of tool wear based on wavelet neural network. J. Beijing Univ. Aeronaut. Astronaut. 2011, 37, 106–109. [Google Scholar]
- Xu, Y. Wear state recognition of drills based on K-means cluster and radial basis function neural network. Int. J. Autom. Comput. 2010, 7, 271–276. [Google Scholar]
- Hu, Y.P.; An, G.; Niu, Y.T.; Liu, G.Y. Condition recognition of gear-box with combination of wavelet analysis and neural network. J. Acad. Armored Force Eng. 2009, 23, 36–39. [Google Scholar]
- Lui, Y.Q.; Gao, J.M.; Jiang, H.Q.; Chen, K. Condition recognition of complex systems based on multi-fractal analysis. In Proceedings of the Annual Reliability and Maintainability Symposium, Lake Buena Vista, FL, USA, 24–27 January 2011.
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef]
- Feng, G. A survey on analysis and design of model-based fuzzy control systems. IEEE Trans. Fuzzy Syst. 2006, 14, 676–697. [Google Scholar] [CrossRef]
- Wu, C.L.; Chau, K.W.; Li, Y.S. Methods to improve neural network performance in daily flows prediction. J. Hydrol. 2009, 372, 80–93. [Google Scholar] [CrossRef]
- Chau, K.W.; Wu, C.L. A hybrid model coupled with singular spectrum analysis for daily rainfall prediction. J. Hydroinform. 2010, 12, 458–473. [Google Scholar] [CrossRef]
- Specht, D.F. Probabilistic neural networks and the polynomial Adaline as complementary techniques for classification. IEEE Trans. Neural Netw. 1990, 1, 111–121. [Google Scholar] [CrossRef] [PubMed]
- Lotfi, A.; Benyettou, A. A reduced probabilistic neural network for the classification of large database. Turk. J. Electr. Eng. Comput. Sci. 2014, 22, 979–989. [Google Scholar] [CrossRef]
- Su, M.S.; Chen, J.F.; Lin, Y.H. Identification of partial discharge location in a power cable using fuzzy inference system and probabilistic neural networks. Electr. Power Compon. Syst. 2012, 40, 613–627. [Google Scholar] [CrossRef]
- Lin, H.; Yan, W.S.; Li, H. Fuzzy and PNN-based Direct Torque Control for Permanent Magnet Synchronous Motor. In Proceedings of the 4th IEEE Conference on Industrial Electronics and Applications, Xi’an, China, 25–27 May 2009.
- Huang, Y.S.; Tian, C.F. Research on credit risk assessment model of commercial banks based fuzzy probabilistic neural network. In Proceedings of the 2nd International Conference on Risk Management and Engineering Management, Beijing, China, 4–6 November 2008.
- Asgary, R.; Mohammadi, K. Using fuzzy probabilistic neural network for fault detection in MEMS. In Proceedings of the 5th International Conference on Intelligent Systems Design and Applications, Wroclaw, Poland, 8–10 September 2005.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Left Cutting Current/Ampere | ||||||||
| Group 1 | Group 2 | Group 3 | Group 4 | Group 5 | Group 6 | Group 7 | Group 8 | |
| 1 | 26.8519 | 27.7778 | 27.3148 | 27.1605 | 27.9321 | 29.1667 | 27.6235 | 27.4691 |
| 2 | 26.8519 | 27.3148 | 27.3148 | 27.1605 | 27.3148 | 29.1667 | 27.6235 | 26.8519 |
| 3 | 26.8519 | 25.6173 | 27.3148 | 27.1605 | 27.9321 | 28.5494 | 27.6235 | 26.8519 |
| 4 | 26.8519 | 27.1605 | 27.4691 | 27.3148 | 27.9321 | 28.5494 | 28.2407 | 26.8519 |
| 5 | 26.8519 | 27.1605 | 27.3148 | 27.6235 | 27.7778 | 28.5494 | 27.6235 | 26.8519 |
| ... | ...... | |||||||
| 127 | 27.7778 | 27.3148 | 27.0062 | 27.9321 | 28.7037 | 27.9321 | 26.6975 | 26.8519 |
| 128 | 27.7778 | 27.3148 | 27.0062 | 27.9321 | 28.7037 | 28.2407 | 26.8519 | 26.8519 |
| Left Cutting Temperature/Degree Centigrade | ||||||||
| Group 1 | Group 2 | Group 3 | Group 4 | Group 5 | Group 6 | Group 7 | Group 8 | |
| 1 | 53.1829 | 53.0671 | 53.7037 | 54.2824 | 55.2662 | 55.9606 | 56.6551 | 57.4653 |
| 2 | 53.1829 | 52.8935 | 53.9931 | 54.6296 | 55.0926 | 55.8449 | 56.8866 | 57.9282 |
| 3 | 53.1250 | 53.4144 | 53.7037 | 54.5718 | 55.5556 | 56.2500 | 57.1759 | 57.5810 |
| 4 | 52.8356 | 53.0671 | 53.9931 | 54.9190 | 55.7292 | 56.1343 | 56.8287 | 57.7546 |
| 5 | 53.1250 | 53.0671 | 54.3403 | 54.6875 | 55.3819 | 56.5394 | 57.5231 | 57.8704 |
| ... | ...... | |||||||
| 127 | 52.7778 | 53.4144 | 54.6296 | 54.2824 | 55.6713 | 56.6551 | 56.8287 | 57.9282 |
| 128 | 52.7778 | 53.3565 | 54.6296 | 54.6296 | 55.6134 | 56.8866 | 56.8287 | 57.8704 |
| Right Cutting Current/Ampere | ||||||||
| Group 1 | Group 2 | Group 3 | Group 4 | Group 5 | Group 6 | Group 7 | Group 8 | |
| 1 | 26.0802 | 27.3148 | 27.3148 | 27.6235 | 27.3148 | 27.0062 | 26.6975 | 26.6975 |
| 2 | 26.0802 | 27.1605 | 27.3148 | 27.6235 | 27.6235 | 27.0062 | 26.2346 | 26.6975 |
| 3 | 26.0802 | 26.3889 | 27.4691 | 27.6235 | 27.6235 | 26.3889 | 26.6975 | 27.0062 |
| 4 | 25.9259 | 26.8519 | 27.7778 | 27.7778 | 27.6235 | 26.3889 | 26.6975 | 26.8519 |
| 5 | 26.0802 | 26.8519 | 27.6235 | 27.1605 | 27.1605 | 26.3889 | 26.6975 | 26.8519 |
| ... | ...... | |||||||
| 127 | 27.3148 | 27.6235 | 28.2407 | 27.3148 | 26.8519 | 27.0062 | 26.2346 | 28.5494 |
| 128 | 27.3148 | 27.6235 | 28.2407 | 27.3148 | 26.8519 | 26.6975 | 26.2346 | 28.5494 |
| ... | ...... | |||||||
| Event Number | FPNN Estimation State | Actual State | Time/h:m:s | Computing Time/s |
|---|---|---|---|---|
| 1 | Alarm | Alarm | 0:00:40 | 0.8763 |
| 2 | Alarm | Alarm | 0:03:20 | 0.9239 |
| 3 | Alarm | Alarm | 0:05:30 | 0.7633 |
| ...... | ||||
| 14 | Normal | Alarm | 0:15:20 | 0.8520 |
| 15 | Alarm | Alarm | 0:20:30 | 0.9172 |
| 16 | Alarm | Normal | 0:22:30 | 1.0239 |
| 17 | Fault | Fault | 0:26:50 | 0.9764 |
| ...... | ||||
| 22 | Alarm | Alarm | 0:52:40 | 0.8012 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, J.; Wang, Z.; Tan, C.; Liu, X. A State Recognition Approach for Complex Equipment Based on a Fuzzy Probabilistic Neural Network. Algorithms 2016, 9, 34. https://doi.org/10.3390/a9020034
Xu J, Wang Z, Tan C, Liu X. A State Recognition Approach for Complex Equipment Based on a Fuzzy Probabilistic Neural Network. Algorithms. 2016; 9(2):34. https://doi.org/10.3390/a9020034
Chicago/Turabian StyleXu, Jing, Zhongbin Wang, Chao Tan, and Xinhua Liu. 2016. "A State Recognition Approach for Complex Equipment Based on a Fuzzy Probabilistic Neural Network" Algorithms 9, no. 2: 34. https://doi.org/10.3390/a9020034
APA StyleXu, J., Wang, Z., Tan, C., & Liu, X. (2016). A State Recognition Approach for Complex Equipment Based on a Fuzzy Probabilistic Neural Network. Algorithms, 9(2), 34. https://doi.org/10.3390/a9020034