
A Particle Filter Track-Before-Detect Algorithm Based on Hybrid Differential Evolution

Abstract
:1. Introduction
2. TBD System Setup
2.1. Target Dynamic Model
2.2. Measurement Model
3. Hybrid Differential Evolution Particle Filter Track-Before-Detect Algorithm
3.1. Bayesian Particle Filter Track-Before-Detect
3.2. Improved PF-TBD-Based on the HDE Algorithm
3.2.1. Hybrid Differential Evolution Algorithm
3.2.2. Proposed Method
- Step 1:
- Calculate the target existence variable: .
- Step 2:
- Create a set of particles. These are two possible situations.
- (i)
- Set the ‘birth particle’ state as a sample from the proposal density . The target’s location is uniform over the sensor field-of-view. Its velocity and intensity are assumed to be uniform as follows , , where and are the minimum and the maximum of the target velocity, respectively. and are the minimum and the maximum of the target intensity, respectively.
- (ii)
- Set the “survival particle” state sampled from the proposal . That is, the “survival particle” is sampled according to the target state transition Equation (1).
- (iii)
- For each particle, compute the un-normalized weight by using the likelihood ratio .
- Step 3:
- Optimize the sample particles by HDE. The sampling particles are regarded as the initial population of the HDE algorithm, and the corresponding weights are regarded as the fitness functions. According to the HDE algorithm, the process is iterated until the optimal population is found or a pre-specified condition is reached, then we can get the optimal set of particles .
- Step 4:
- Normalize the weights of each particle: .
- Step 5:
- Resample the particles: .
- Step 6:
- Output the state estimation: an estimate of the target state can be made from the set of particles resulting from the time algorithm above.
4. Simulation Results
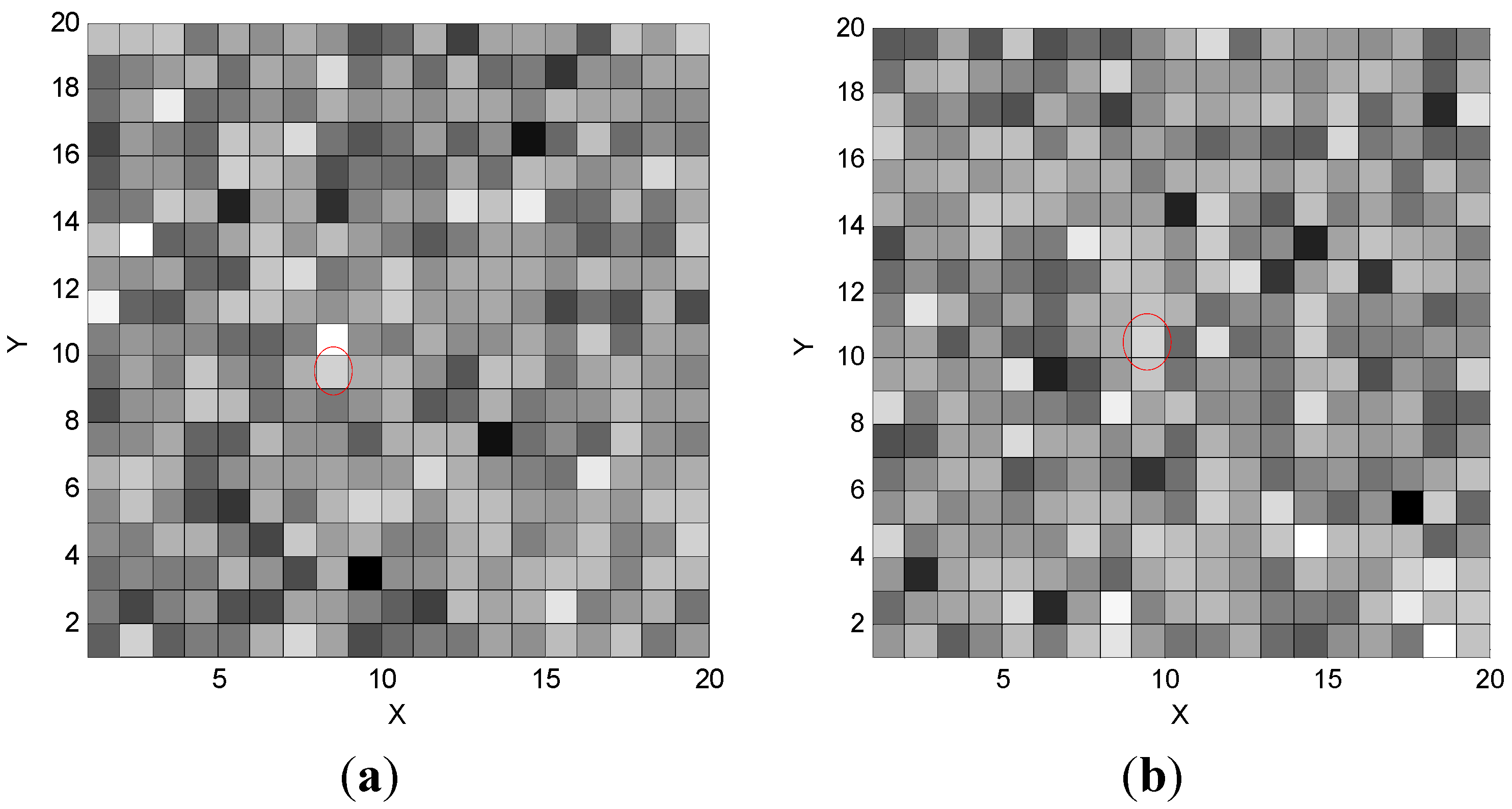
4.1. Scenario-CV
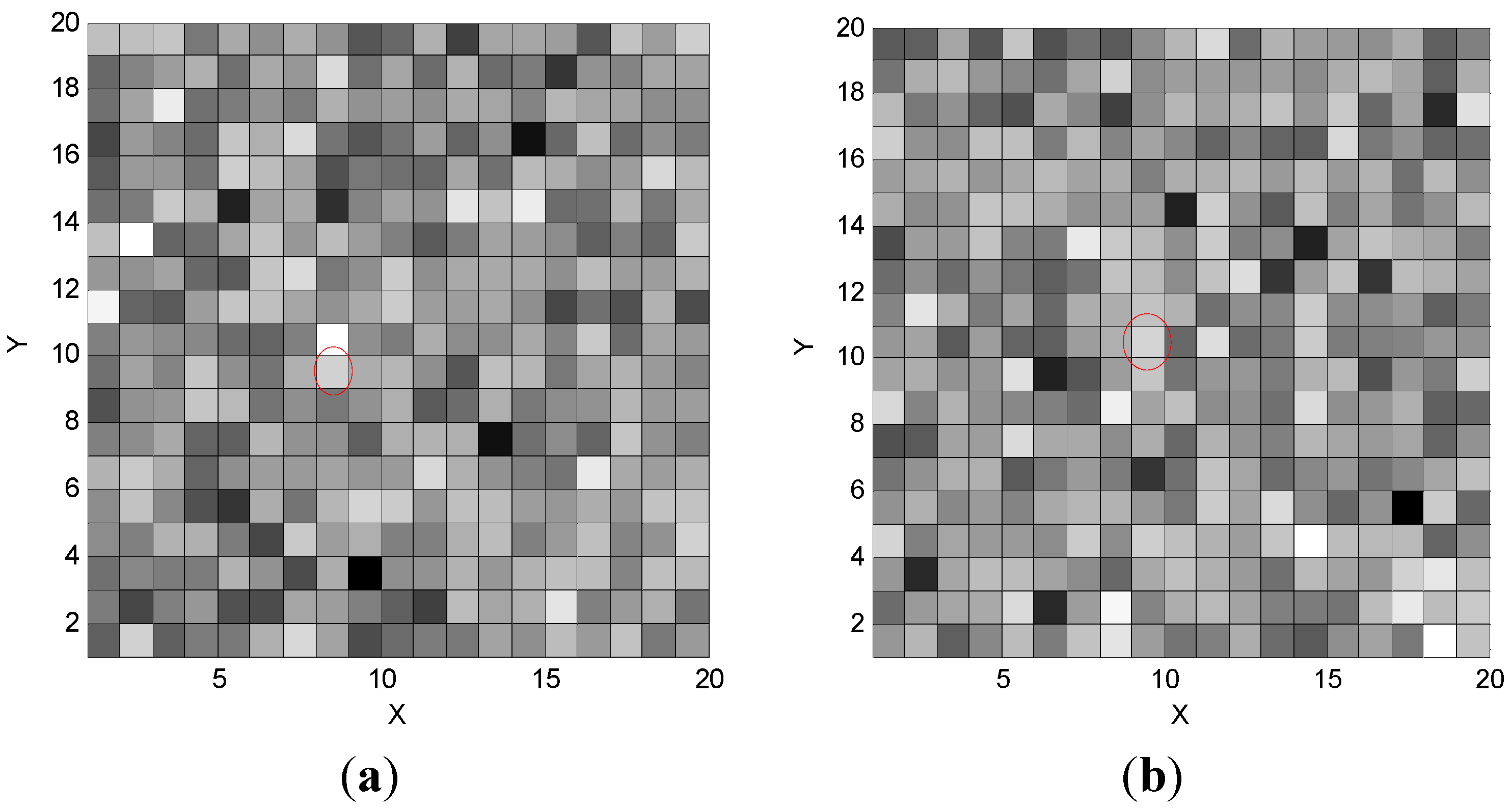
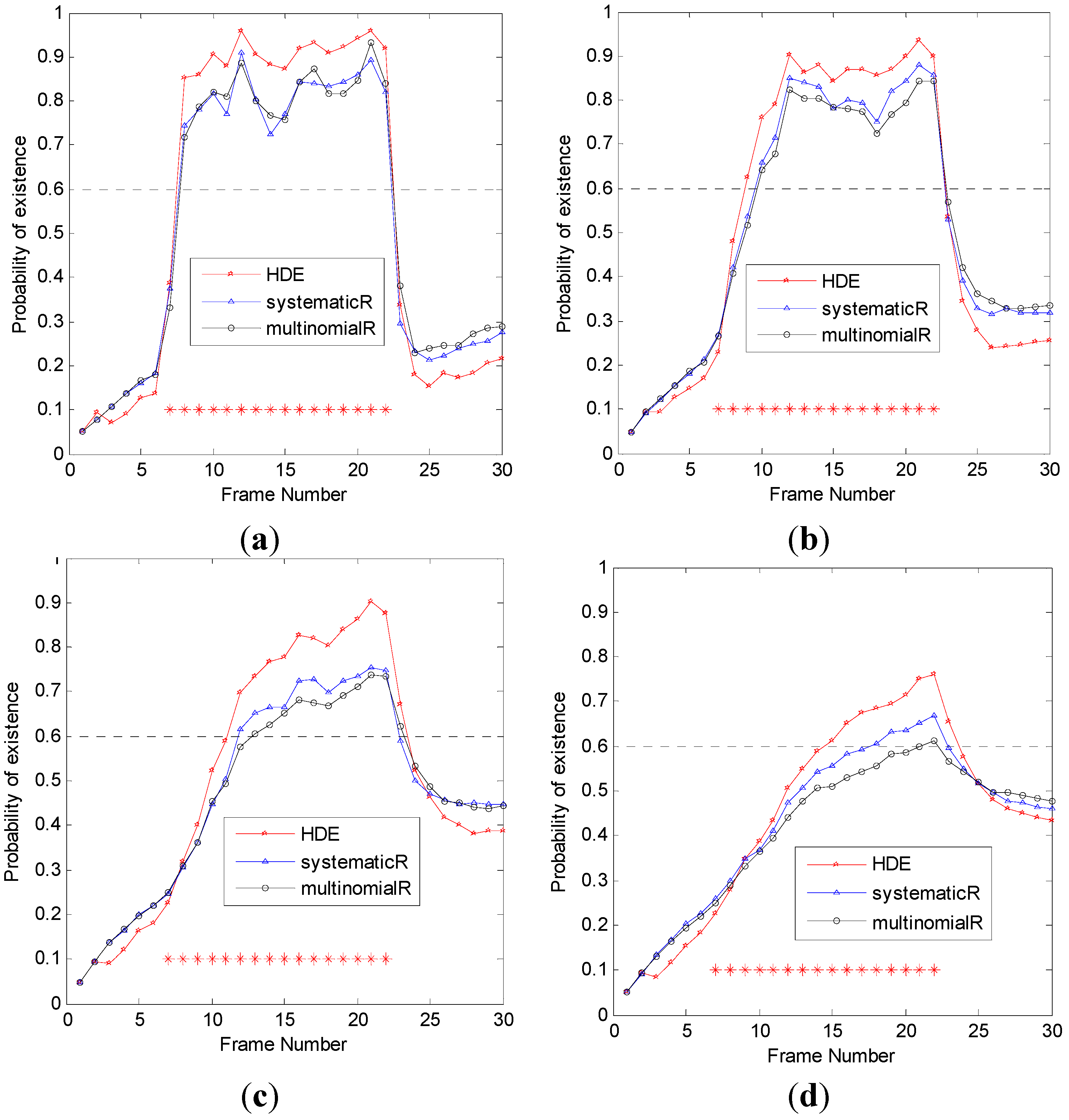
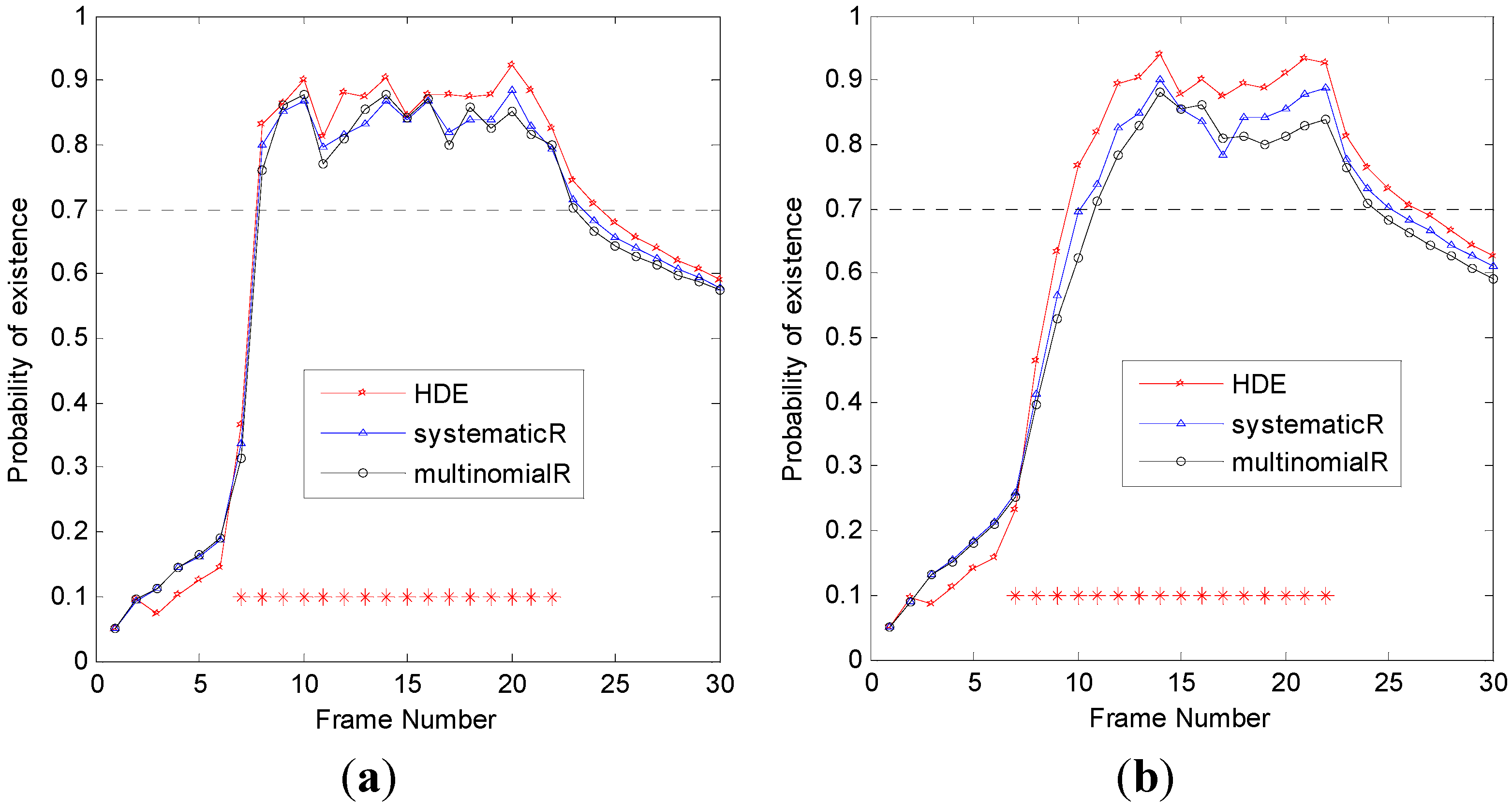
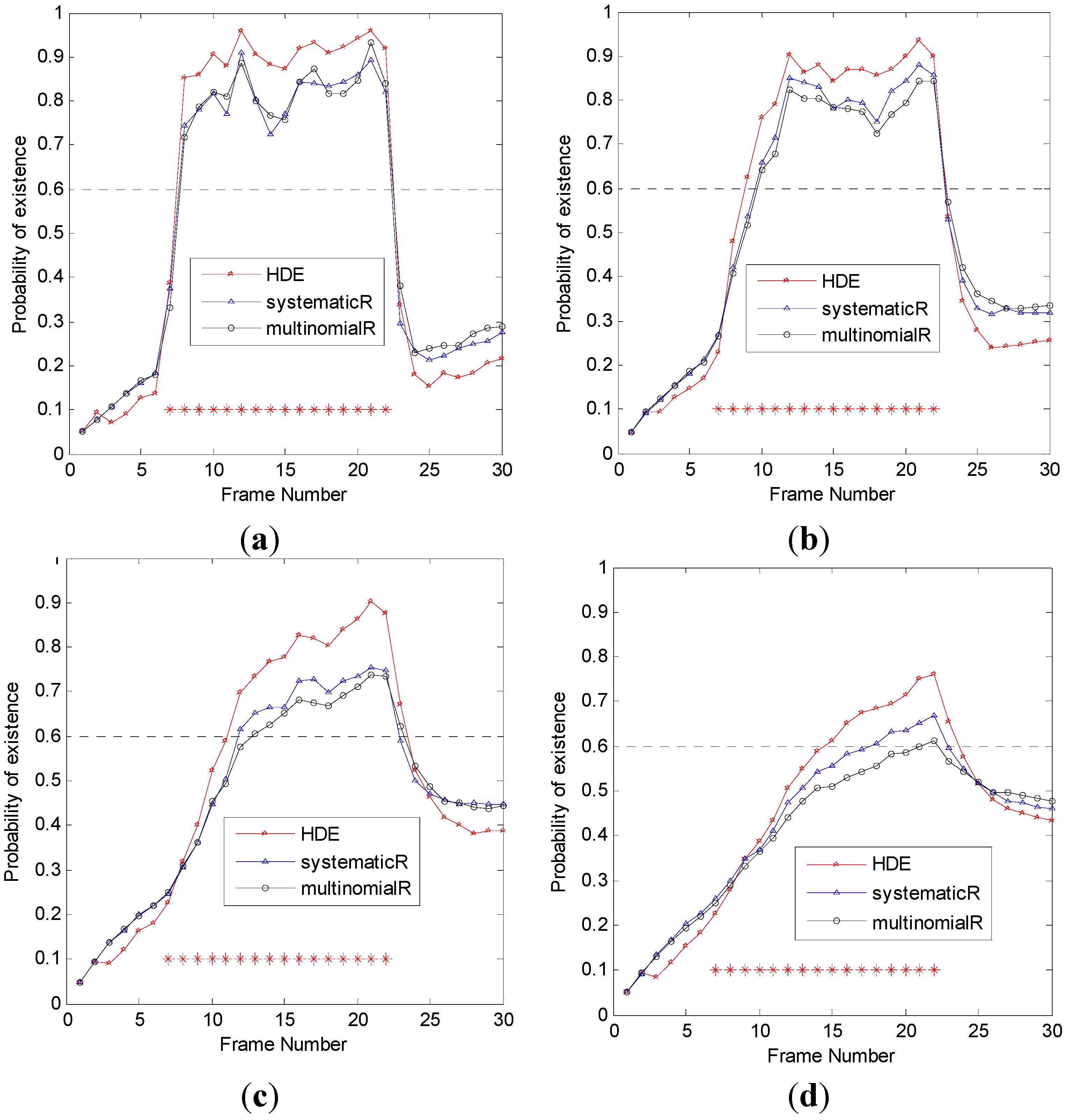
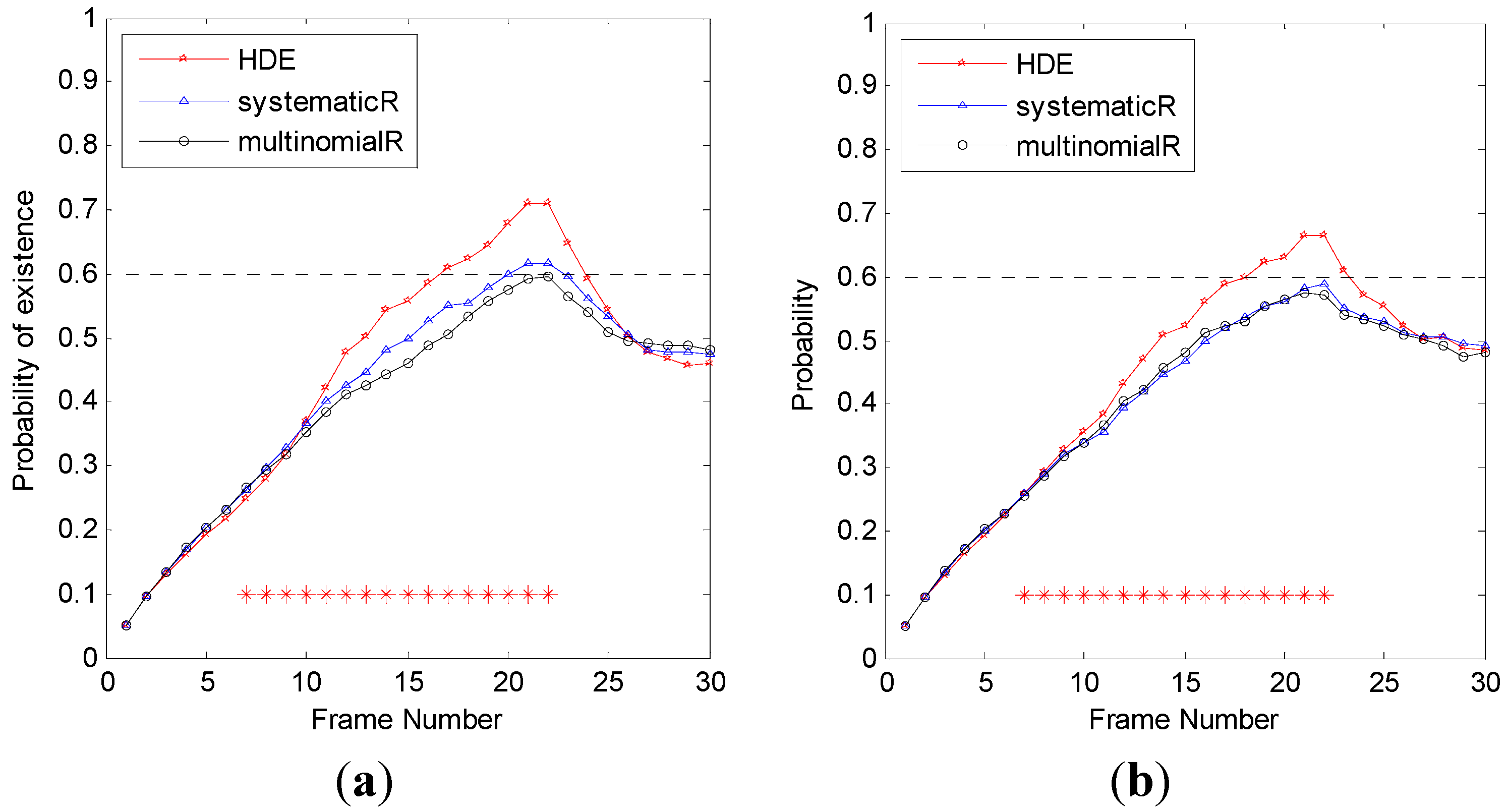
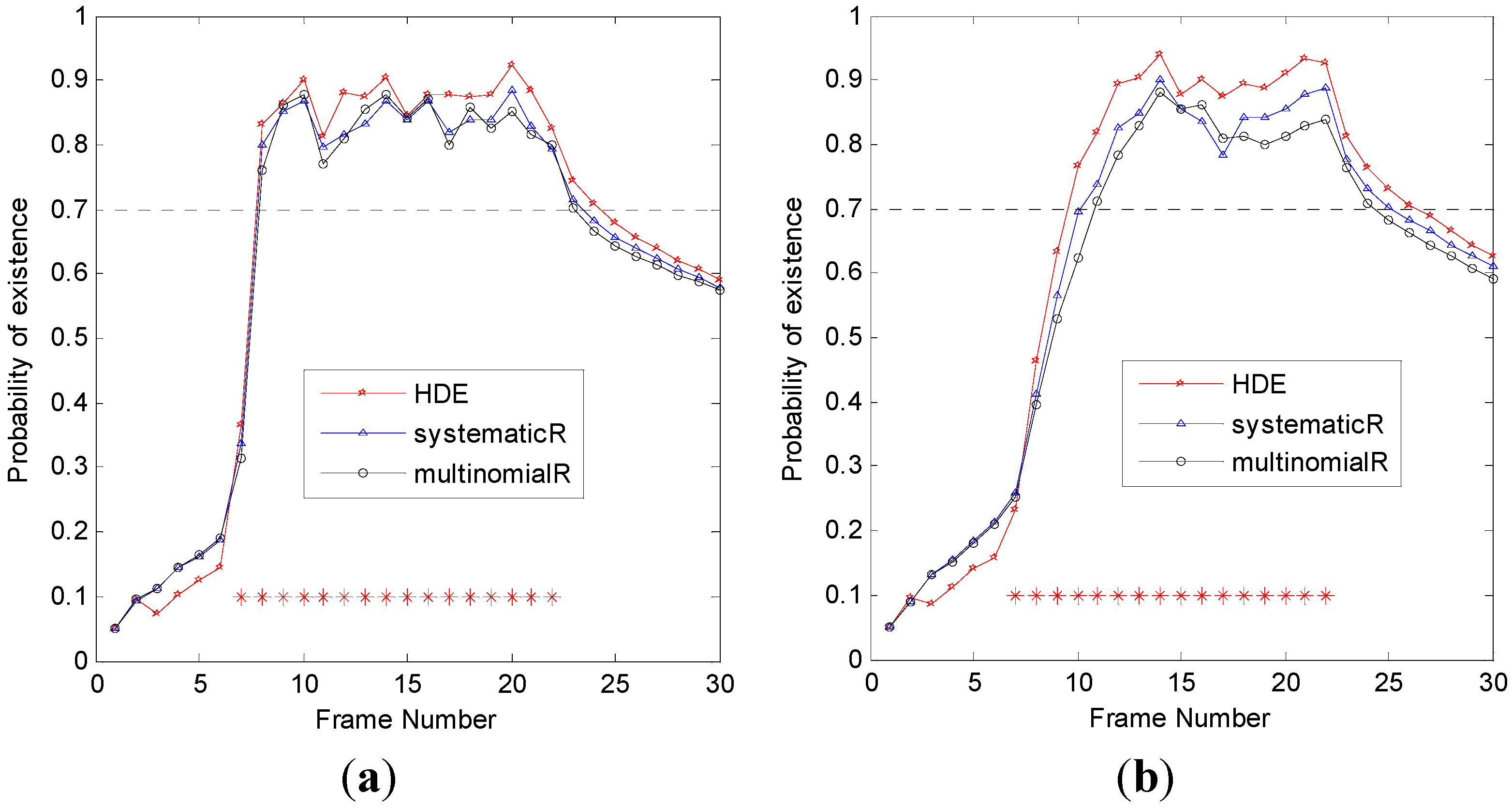
4.1.1. Detection Performance Analysis

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | 9 dB | 6 dB | 3 dB | 1 dB |
|---|---|---|---|---|
| MultinomialR PF-TBD | 0.770 | 0.657 | 0.423 | 0.217 |
| SystematicR PF-TBD | 0.774 | 0.682 | 0.498 | 0.300 |
| HDE PF-TBD | 0.875 | 0.765 | 0.628 | 0.395 |
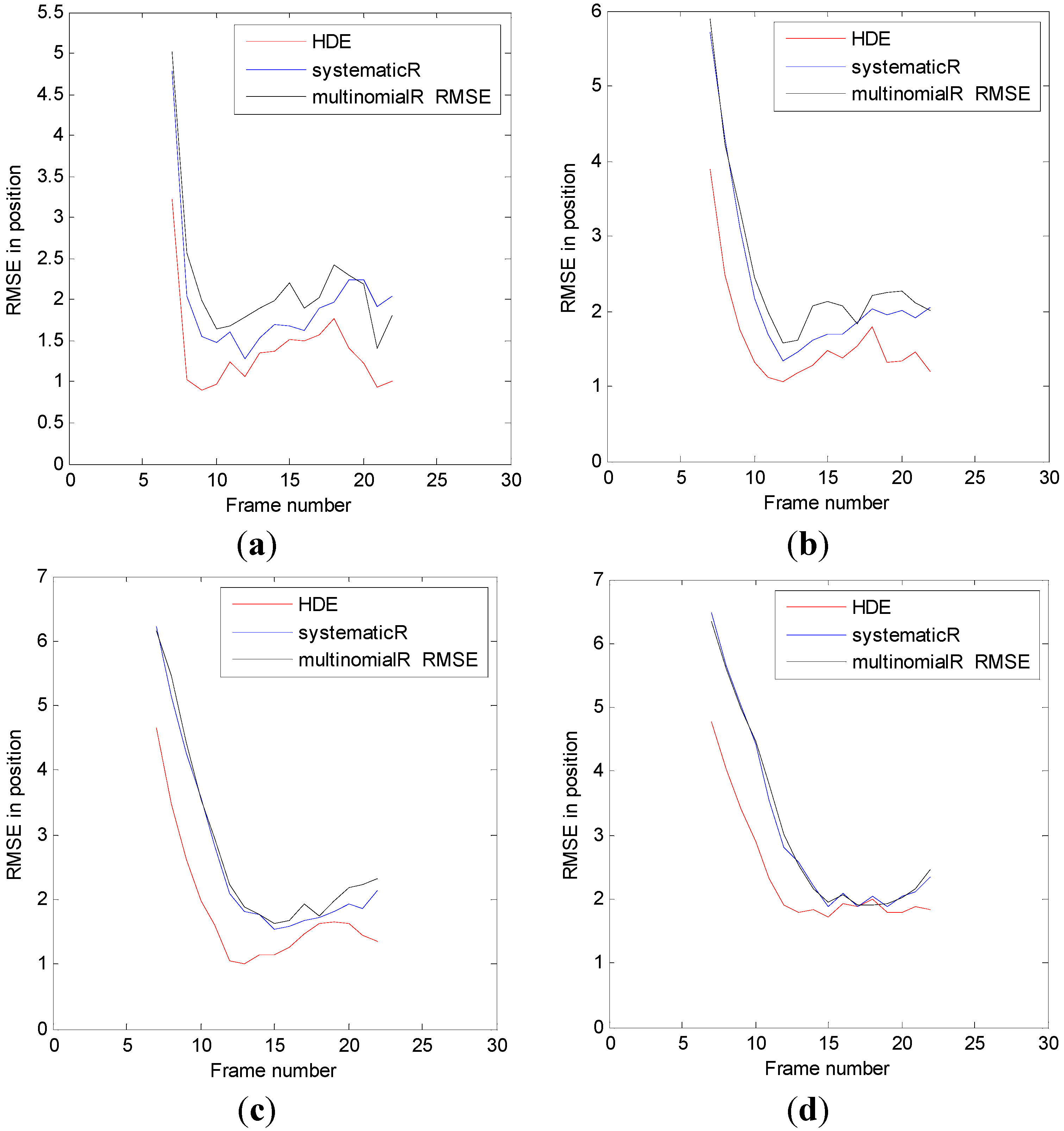
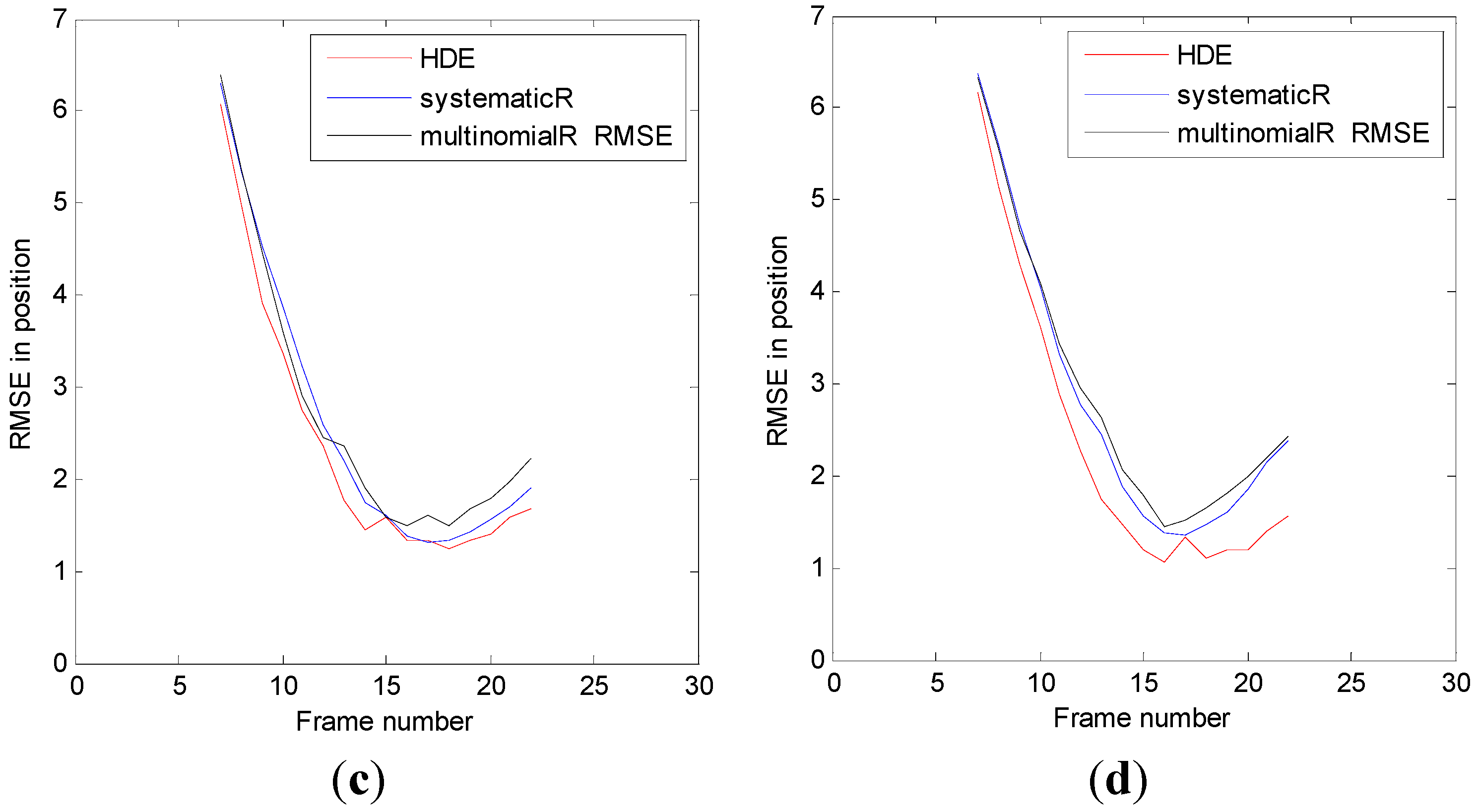
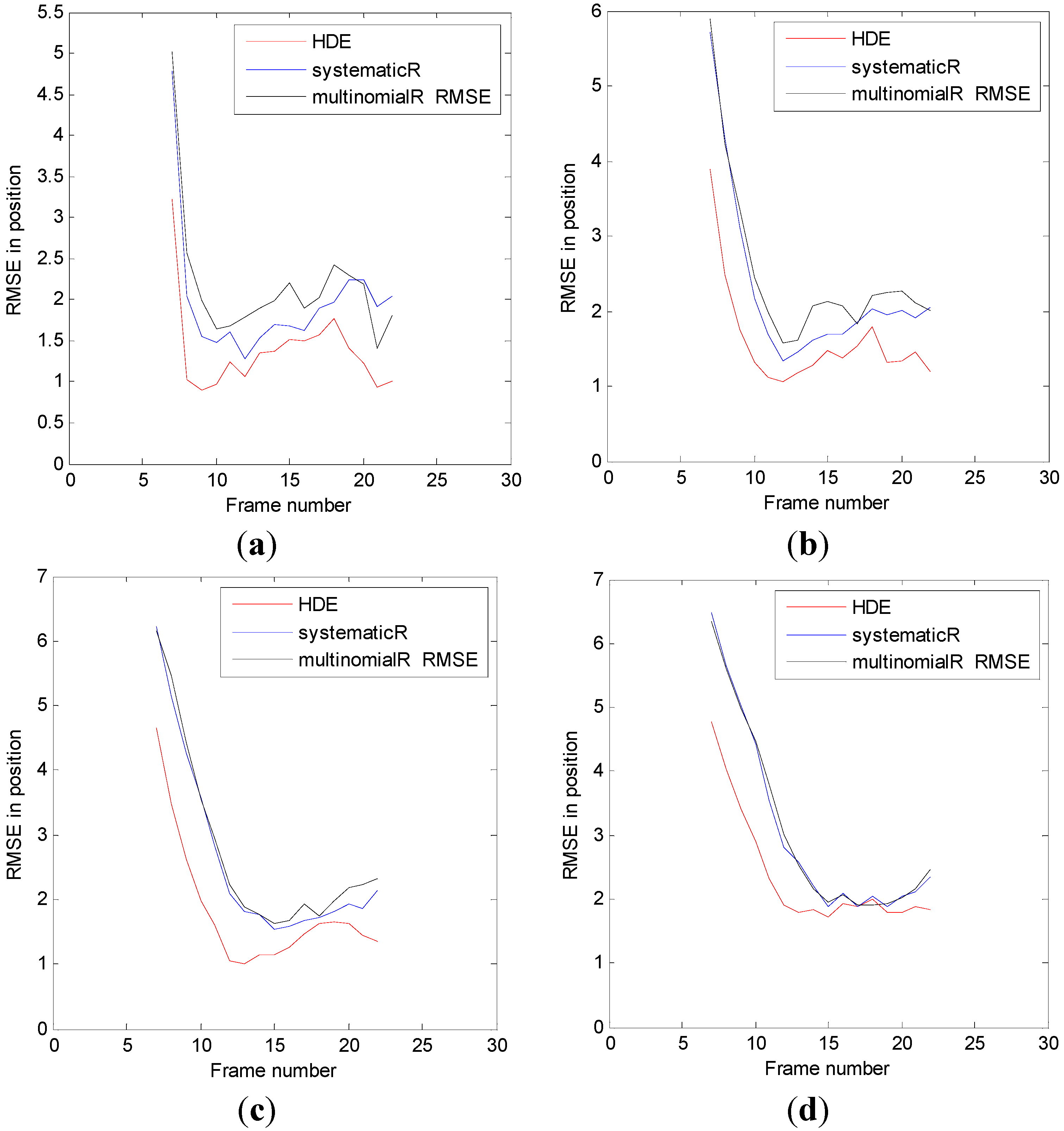
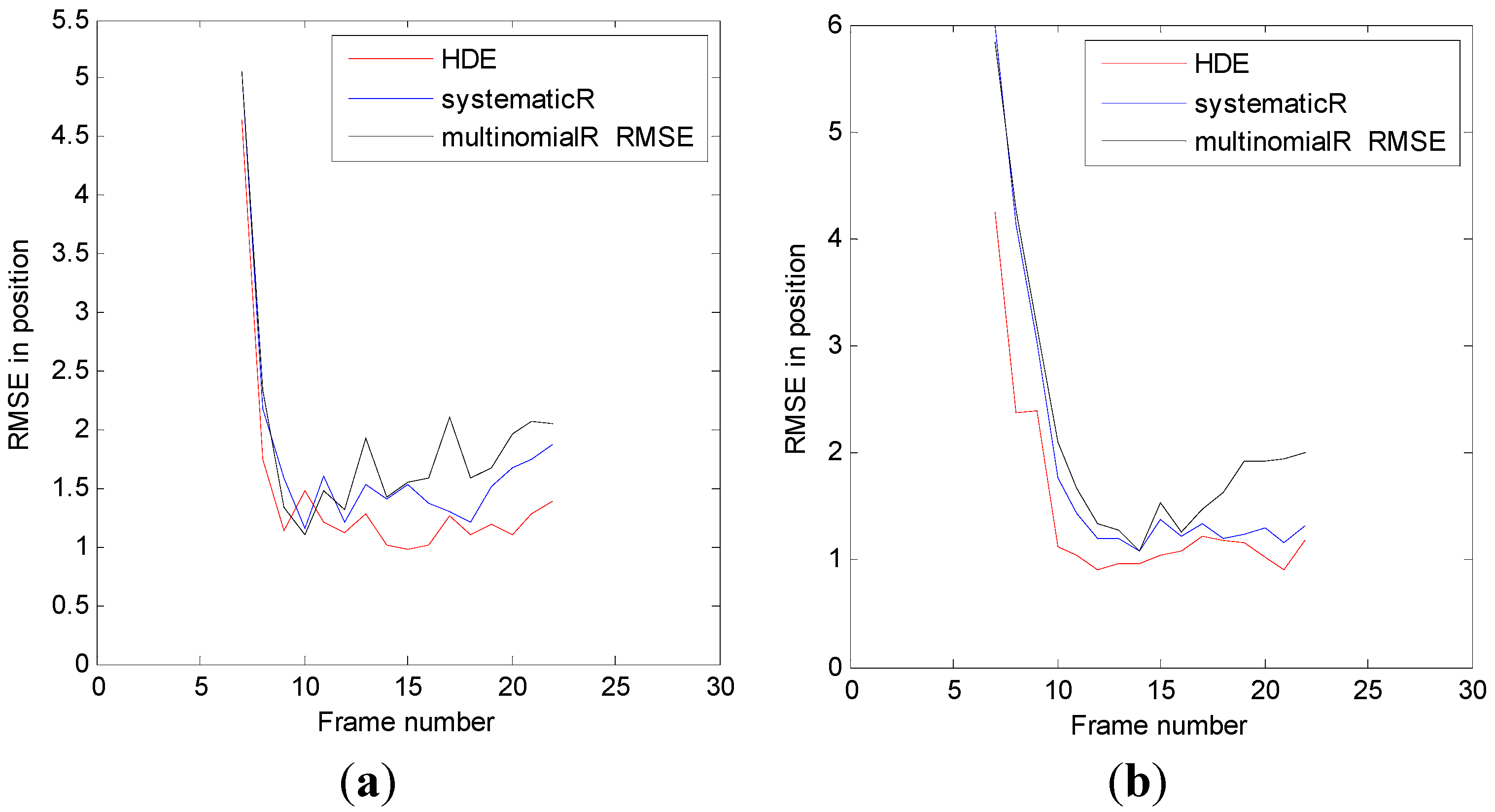
4.1.2. Tracking Performance Analysis
| Algorithm | 9 dB | 6 dB | 3 dB | 1 dB |
|---|---|---|---|---|
| MultinomialR PF-TBD | 2.1757 | 2.4715 | 2.7528 | 3.0814 |
| SystematicR PF-TBD | 1.9771 | 2.3427 | 2.6222 | 3.0622 |
| HDE PF-TBD | 1.3810 | 1.5971 | 1.8221 | 2.3595 |
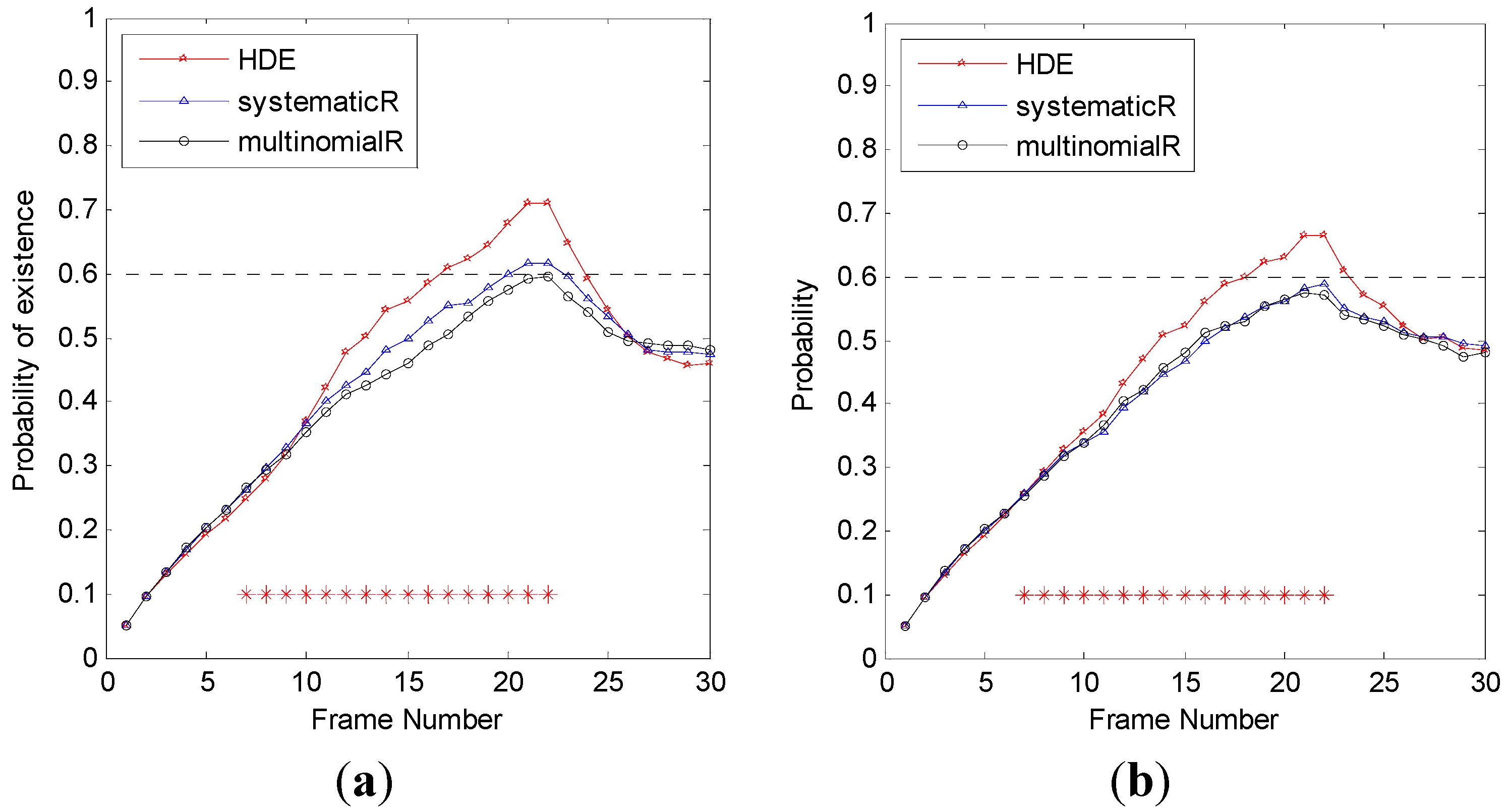
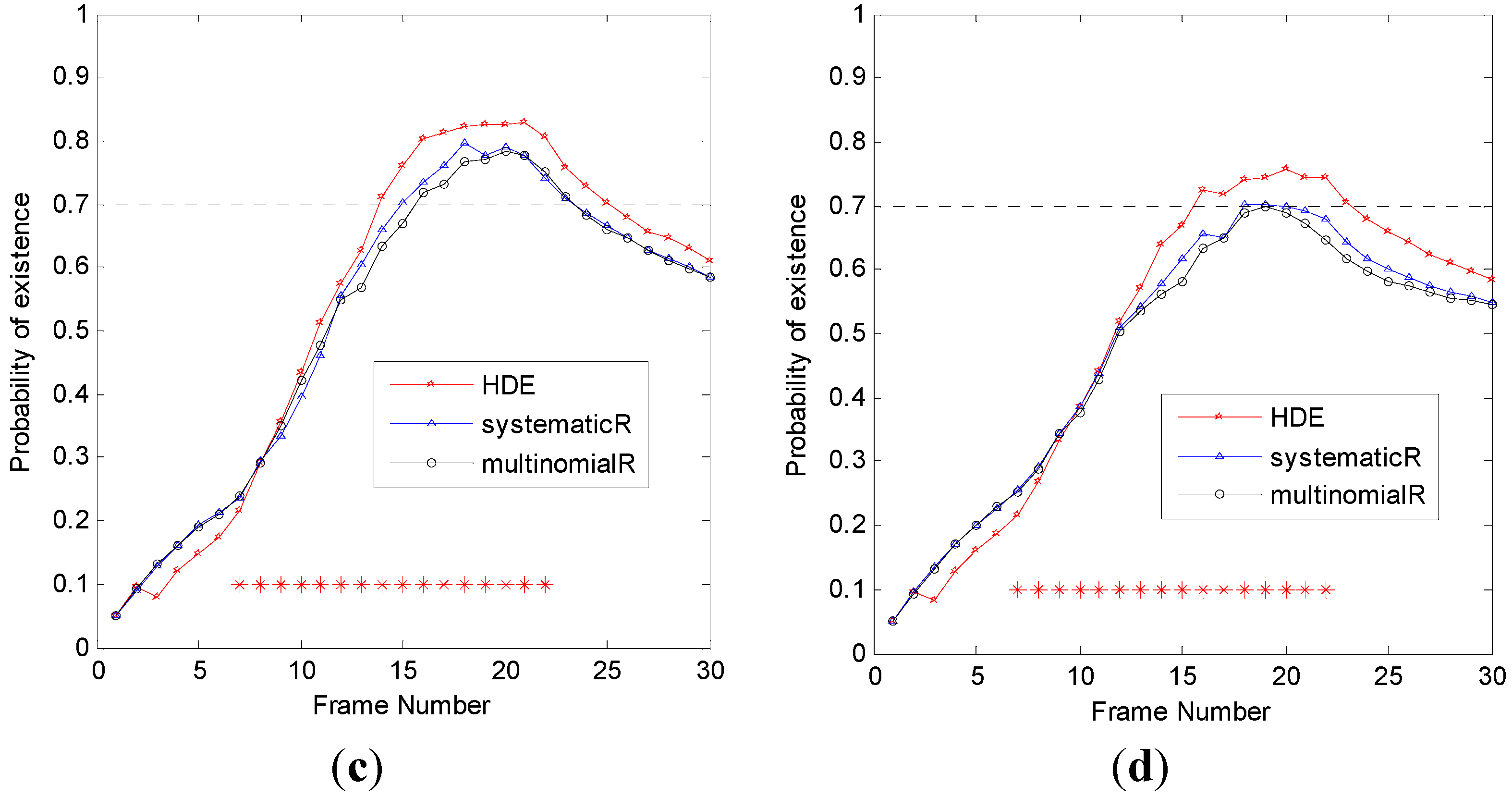
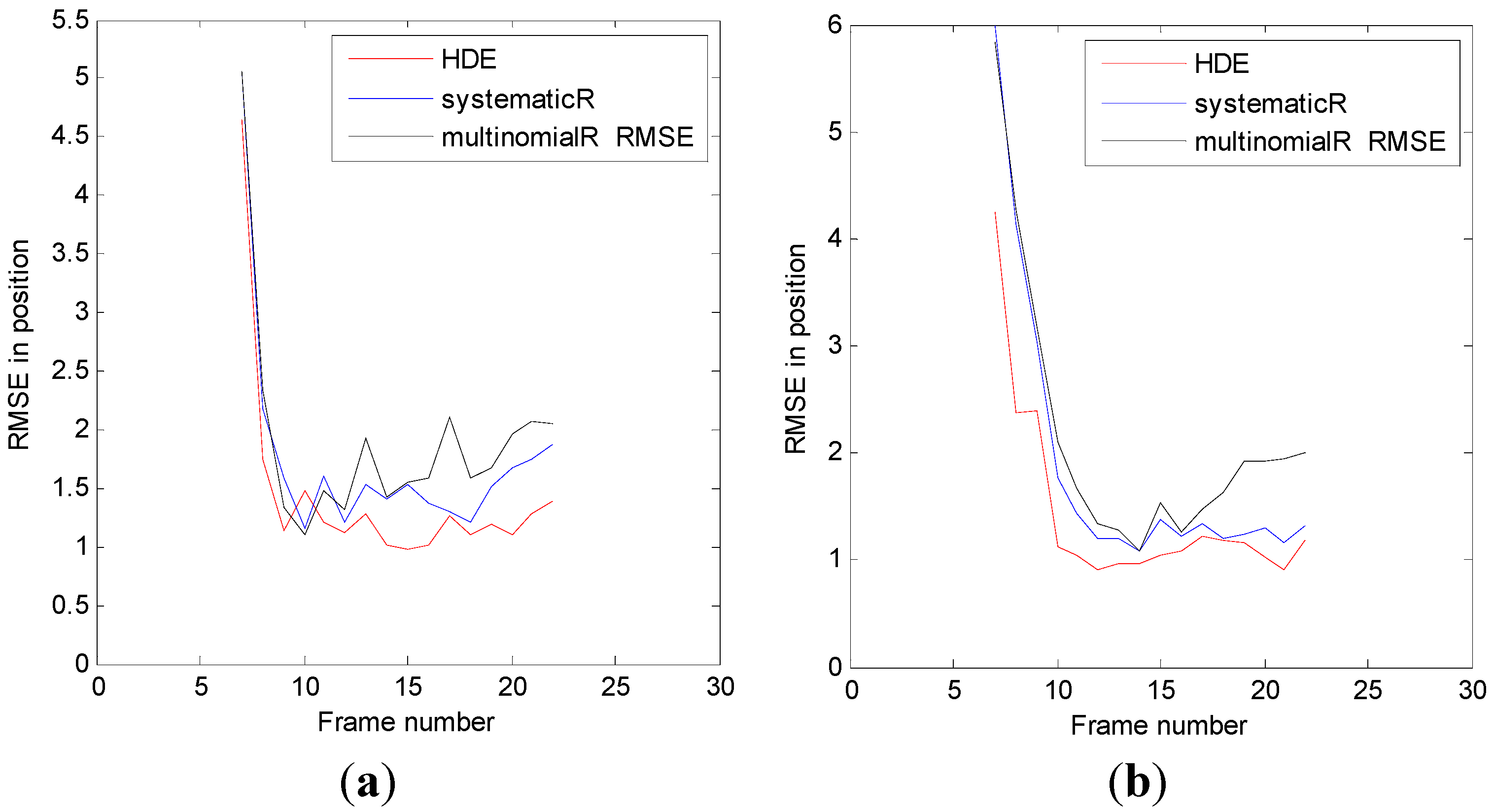
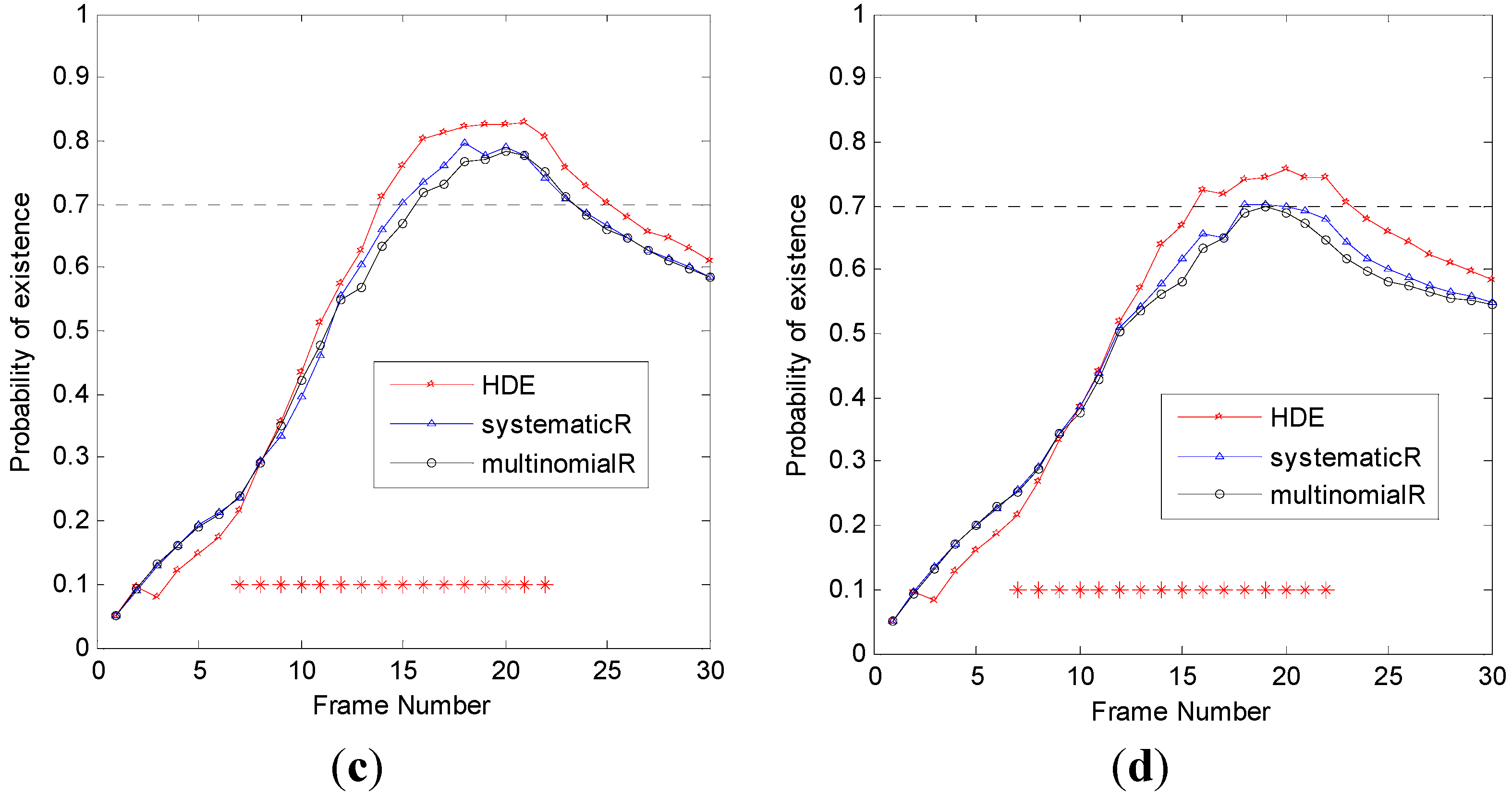
4.2. Scenario-CT
| Algorithm | 9 dB | 6 dB | 3 dB | 1 dB |
|---|---|---|---|---|
| MultinomialR PF-TBD | 0.747 | 0.621 | 0.378 | 0.275 |
| SystematicR PF-TBD | 0.768 | 0.648 | 0.399 | 0.284 |
| HDE PF-TBD | 0.827 | 0.743 | 0.501 | 0.367 |
| Algorithm | 9 dB | 6 dB | 3 dB | 1 dB |
|---|---|---|---|---|
| MultinomialR PF-TBD | 1.910 | 2.1556 | 2.7044 | 2.909 |
| SystematicR PF-TBD | 1.745 | 1.8739 | 2.6258 | 2.81 |
| HDE PF-TBD | 1.433 | 1.4477 | 2.3836 | 2.3541 |

5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hadzagic, M.; Michalska, H.; Lefebvre, E. Track-before-detect methods in tracking low-observable targets: A survey. Sens. Trans. Mag. 2005, 54, 374–380. [Google Scholar]
- Rutten, M.; Gordon, N.; Maskell, S. Recursive track-before-detect with target amplitude fluctuations. IEE Proc. Radar Sonar Navig. 2005, 152, 345–352. [Google Scholar] [CrossRef]
- Pohlig, S.C. An algorithm for detection of moving optical targets. IEEE Trans. Aerosp. Electron. Syst. 1989, 25, 56–63. [Google Scholar] [CrossRef]
- Carlson, B.D.; Evans, E.D.; Wilson, S.L. Search radar detection and track with the hough transform. IEEE Trans. Aerosp. Electron. Syst. 1994, 30, 102–108. [Google Scholar] [CrossRef]
- Huang, D.; Xue, A.; Guo, Y. Penalty dynamic programming algorithm for dim targets detection in sensor systems. Sensors 2012, 12, 5028–5046. [Google Scholar] [CrossRef] [PubMed]
- Grossi, E.; Lops, M.; Venturino, L. A Novel dynamic programming algorithm for track-before-detect in radar systems. IEEE Trans. Signal. Process. 2013, 61, 2608–2619. [Google Scholar] [CrossRef]
- Ristic, B.; Arulampalam, S.; Gordon, N. Beyond the Kalman. Filter-Particle Filters for Tracking Applications; Artech House: London, UK, 2004. [Google Scholar]
- Salmond, D.J.; Birch, H. A Particle Filter for Track-Before-Detect. In Proceedings of the American Control Conference, Arlington, VA, USA, 25–27 June 2001; pp. 3755–3760.
- Boers, Y.; Driessen, H. Particle Filter Based Detection for Tracking. In Proceedings of the American Control Conference, Arlington, VA, USA, 25–27 June 2001; pp. 4393–4397.
- Davey, S.J.; Rutten, M.G. A Comparison of Three Algorithms for Tracking Dim Targets. In Proceedings of the Information, Decision and Control (IDC’07), Queensland, Australia, 12–14 February 2007; pp. 342–347.
- Davey, S.; Rutten, M.; Cheung, B. Using phase to improve track before detect. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 832–849. [Google Scholar] [CrossRef]
- Boers, Y.; Driessen, J. Multitarget particle filter track before detect application. IEE Proc. Radar Sonar Navig. 2004, 151, 351–357. [Google Scholar] [CrossRef]
- Lepouter, A.; Rabaste, O. A Particle Filter for Target Arrival Detection and Tracking in Track-Before-Detect. In Proceedings of the Workshop on Sensor Data Fusion: Trends, Solutions, Applications (SDF’12), Bonn, Germany, 4–6 September 2012; pp. 13–18.
- Lu, J.; Shui, P.-L. Track-before-detect method based on cost-reference particle filter in non-linear dynamic systems with unknown statistics. IET Signal. Process. 2014, 8, 85–94. [Google Scholar] [CrossRef]
- Hu, Z.B.; Xiong, S.W. Study of hybrid differential evolution based on simulated annealing. Comput. Eng. Des. 2007, 28, 1989–1992. [Google Scholar]
- Zhang, C.; Li, L. Hybrid differential evolution particle filter for nonlinear filtering. Appl. Comput. Electromagn. Soc. 2014, 12, 1133–1139. [Google Scholar]
- Douc, R.; Cappe, O. Comparison of Resampling Schemes for Particle Filtering. In Proceedings of the Image and Signal Processing and Analysis, Zagreb, Croatia, 15–17 September 2005; pp. 64–69.
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, C.; Li, L.; Wang, Y. A Particle Filter Track-Before-Detect Algorithm Based on Hybrid Differential Evolution. Algorithms 2015, 8, 965-981. https://doi.org/10.3390/a8040965
Zhang C, Li L, Wang Y. A Particle Filter Track-Before-Detect Algorithm Based on Hybrid Differential Evolution. Algorithms. 2015; 8(4):965-981. https://doi.org/10.3390/a8040965
Chicago/Turabian StyleZhang, Chaozhu, Lin Li, and Yu Wang. 2015. "A Particle Filter Track-Before-Detect Algorithm Based on Hybrid Differential Evolution" Algorithms 8, no. 4: 965-981. https://doi.org/10.3390/a8040965
APA StyleZhang, C., Li, L., & Wang, Y. (2015). A Particle Filter Track-Before-Detect Algorithm Based on Hybrid Differential Evolution. Algorithms, 8(4), 965-981. https://doi.org/10.3390/a8040965