
Mathematical Models for the Single-Channel and Multi-Channel PMU Allocation Problem and Their Solution Algorithms
 ,
,
Abstract
1. Introduction
2. Consideration of This Study
- (1)
- To achieve the proper PMU number by optimizing a linear or a quadratic cost function under a topological constraint function considering the limitation of the PMU channel limit capacity.
- (2)
- (3)
- We focus on finding the proper PMU number with a branch assignment set solution with a fixed number of channels.
3. Contribution of This Study
- We create an algorithmic connection between the OPP based-model with a restricted channel capacity and the optimal solutions produced by the suggested mathematical and heuristic algorithms.
- The branch-and-bound algorithm is used in a comparison study with nonlinear and heuristic algorithms.
- We present a state-of-the-art solution produced by the integer program solving with a zero absolute gap calculated with zero percentage gap tolerances; this means that this solution is a global one returned by the solver.
- We extend the ILP model into a heuristic search of the feasible set to show that evolutionary algorithms can efficiently perform the optimization following the BBA’s solution.
- Finally, a novel nonlinear program is created and solved by either continuous algorithms or a BBA embedded in the SCIP optimizer performed in MATLAB.
4. Materials and Methods
5. Optimization Models Studied for the OPP Model
- ✓
- Observability of the graph
5.1. Binary-Integer Programming Model Considering an Unlimited Number of Channel Capacities
| Algorithm 1: Steps of BBA methodology |
| 1. Calculate the lower bound: A procedure is used to achieve the lower bound on the objective function to solve the given sub-problem and deliver an estimated point. |
| 2. Calculate the upper Bound: An upper bound is evaluated to give the solution. |
| 3. Branching method: The sub-problem is portioned to deliver more than two children by a procedure strategy |
| 4. Methodology search: A search order is programmed to construct the binary tree. |
| 5. If the stopping criterion is satisfied, then end up the iterative scheme. |
| 6. The BBA ends delivering a solution as an output. |
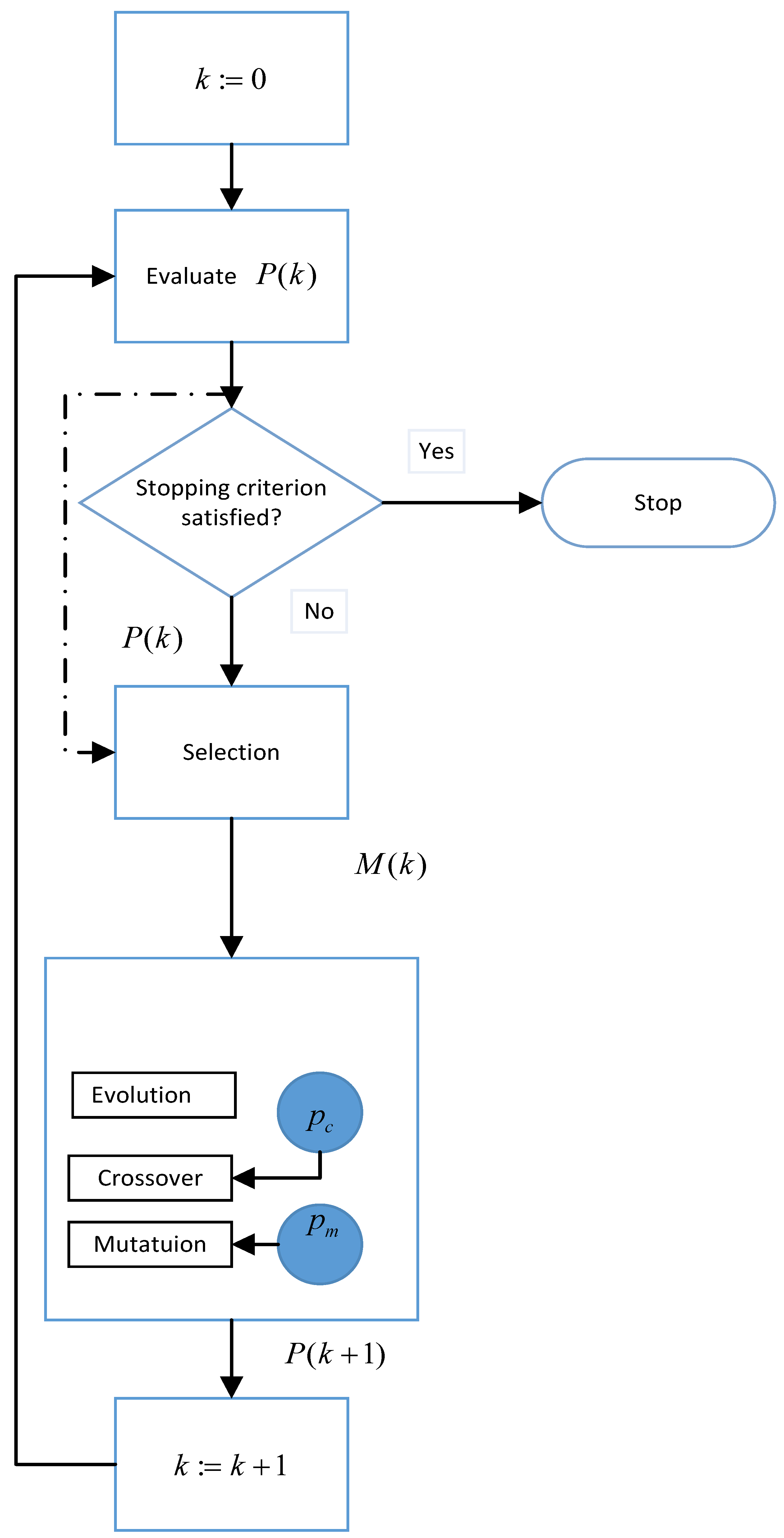
| Algorithm 2: Steps of GA implementation |
| 1 Set ; starting from the population ; |
| 2 Estimate ; |
| 3 If the stopping criterion is completed, then end up the iterations; |
| 4 Choose from ; |
| 5 Evolve to create ; |
| 6 Set , go to step 2. |
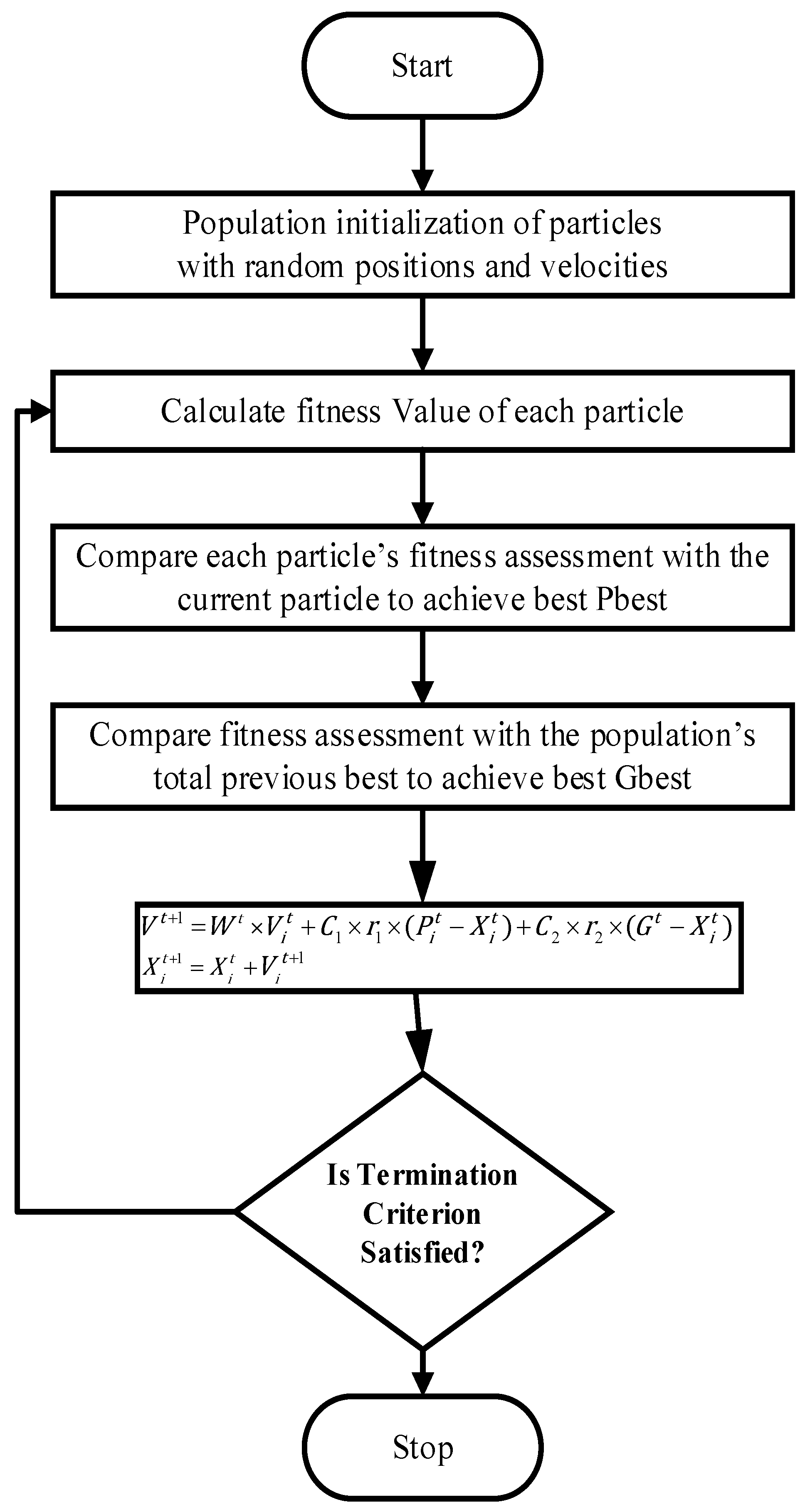
| Algorithm 3: Steps of PSO implementation |
| Objective function . |
| Initialize locations and velocity of particles. |
| Determine from at (). |
| while (criterion) |
| (Iteration counter) |
| For loop over all particles and all dimensions |
| Produce new velocity |
| Compare new locations |
| Assess objective functions at new locations |
| Deliver the current best for each particle |
| end ε |
| Deliver the current global best |
| end while |
| output the final results and |
5.2. Constrained Binary-Integer Programming Model with a Fixed Number of Channels
| Algorithm 4: Steps of MILP Solver implementation |
| MILP Algorithm: Optimal Placement of PMU with multi-channel capacity |
| 1. The set of implementation costs, ; |
| 2. Set of possible combinations including a number of nodes; |
| 3. Define a set of variables Y ; |
| 4. Define binary connectivity matrix; |
| 5. ; objective function considering costs; |
| 6. /* solving the problem of mixed integers; |
| 7. programming*/ |
| 8. Invoke MILP solver in MATLAB environment; |
| 9. solve placement minimizing using mip; |
| 10. |
| 11. Solution (display combinations by which a PMU location is the Center and the other locations representing the PMUs directly observed); |
| 12. Solve linear relaxation problems of the initial MILP model |
| 13. Tighten LP via cutting planes and domain propagation |
| 14. Search for feasible solutions via primal heuristics for the MILP model |
| 15. Branch on variables |
| 16. Output: a binary-feasible solution to the MILP model |
| ✓ Exit: MILP status (optimal or infeasible) and solution |
| ✓ Absolute gap: |
| ✓ Relative gap: 100 (U − L)/(abs(U) + 1) |
- Formulation so that the absolute gap is small;
- Heuristic computations are needed to find a good lower bound;
- Branching;
- Node selection.
5.3. Constrained Binary-Integer Programming Model with a Single-Line PMU
5.4. Constrained Mixed-Integer Nonlinear Programming Formulation
5.5. Constrained Nonlinear Programming Model
| Algorithm 5: Steps of nonlinear algorithms |
| Step 0: initial estimate , we set the iterative number equal to zero, |
| Step 1: Computation of the search direction |
| Step 2: Computation of step-length such as: |
| , |
| Step 3: |
| Step 4: if , then stop. Otherwise, set and go to step 1. |
- Instead of searching local solution points for the optimization models, we examine all the sufficient and guaranteed optimality conditions for finding global solutions.
- Hence the testing of optimality yields the exact solutions by utilizing the BBA, SQP, IPMs, GPSA, and BPSO for simulation purposes.
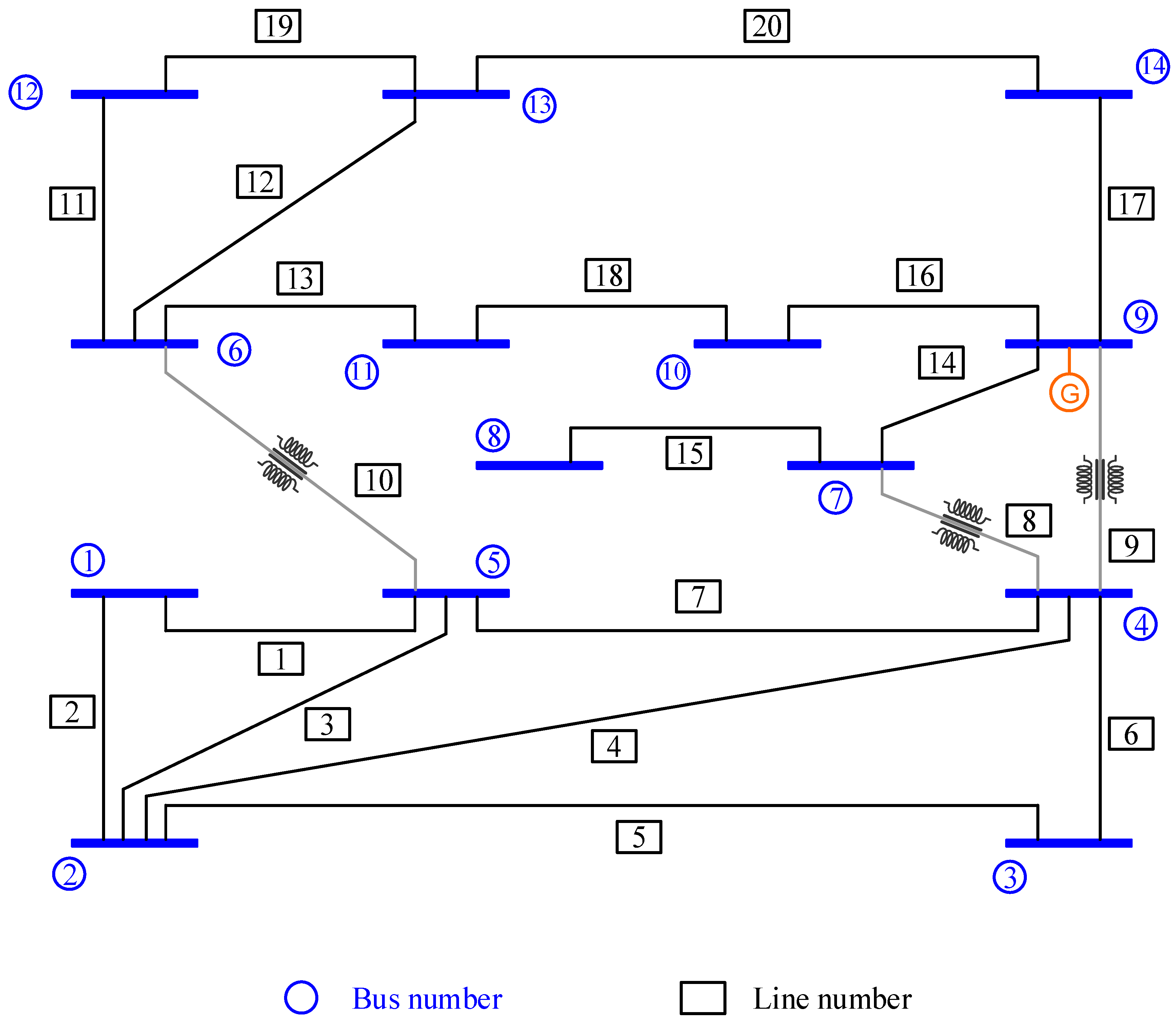
6. The IEEE-14-Bus System for Illustrating the Mathematical Models and Numerical Results Obtained by the Optimization Procedure
| Algorithm 6: Steps of optimizing YALMIP’s BBA |
| + Solver chosen : BMIBNB |
| + Processing objective function |
| + Processing constraints |
| + Branch and bound started |
| * Starting YALMIP global branch & bound. |
| * Upper solver : INTLINPROG |
| * Lower solver : INTLINPROG |
| * LP solver : INTLINPROG |
| * -Extracting bounds from model |
| * -Performing root-node bound propagation |
| * -Calling upper solver + Calling INTLINPROG |
| (Found a solution!) |
| * -Branch-variables : 0 |
| * -More root-node bound-propagation |
| * -Performing LP-based bound-propagation |
| * -And some more root-node bound-propagation |
| * Starting the b&b process |
| Node Upper Gap (%) Lower Open Time |
| + Calling INTLINPROG |
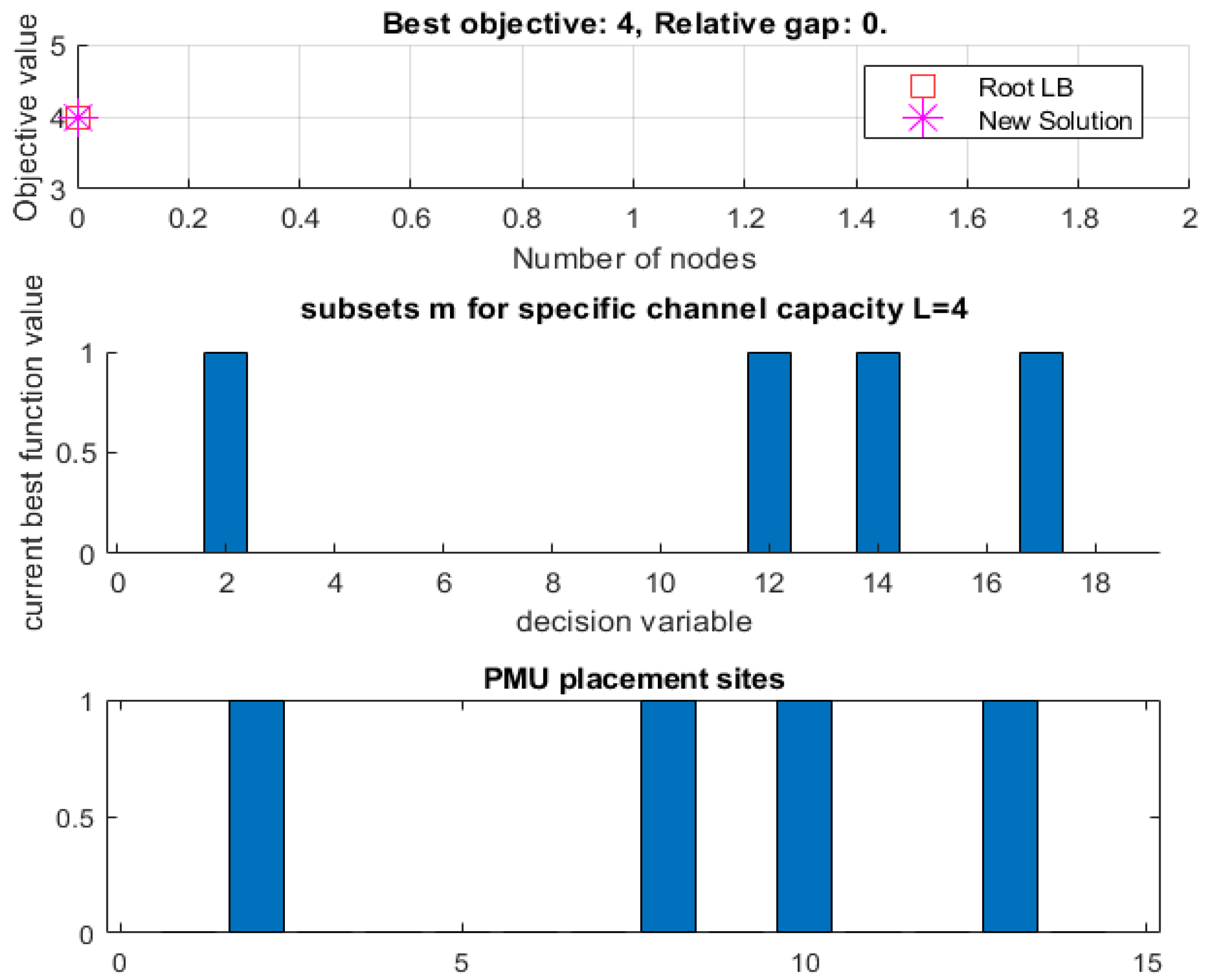
| 1 : 4.00000E+00 0.00 4.00000E+00 0 0s Poor lower bound |
| * Finished. Cost: 4 (lower bound: 4, relative gap 0%) |
| * Termination with all nodes pruned |
| * Timing: 38% spent in upper solver (1 problems solved) |
| * 19% spent in lower solver (1 problems solved) |
| * 1% spent in LP-based domain reduction (0 problems solved) |
| * 1% spent in upper heuristics (0 candidates tried) |
| ans = |
| Columns 1 through 15 |
| 0 1 0 0 0 0 0 0 0 0 0 1 0 1 0 |
| Columns 16 through 18 |
| 0 1 0 |
| ans = |
| 2 12 14 17 |
| Algorithm 7: Steps of optimizing YALMIP’s BBA |
| + Solver chosen : BMIBNB |
| + Processing objective function |
| + Processing constraints |
| + Branch and bound started |
| * Starting YALMIP global branch & bound. |
| * Upper solver : INTLINPROG |
| * Lower solver : INTLINPROG |
| * LP solver : INTLINPROG |
| * -Extracting bounds from model |
| * -Performing root-node bound propagation |
| * -Calling upper solver + Calling INTLINPROG |
| (Found a solution!) |
| * -Branch-variables : 0 |
| * -More root-node bound-propagation |
| * -Performing LP-based bound-propagation |
| * -And some more root-node bound-propagation |
| * Starting the b&b process |
| Node Upper Gap (%) Lower Open Time |
| + Calling INTLINPROG |
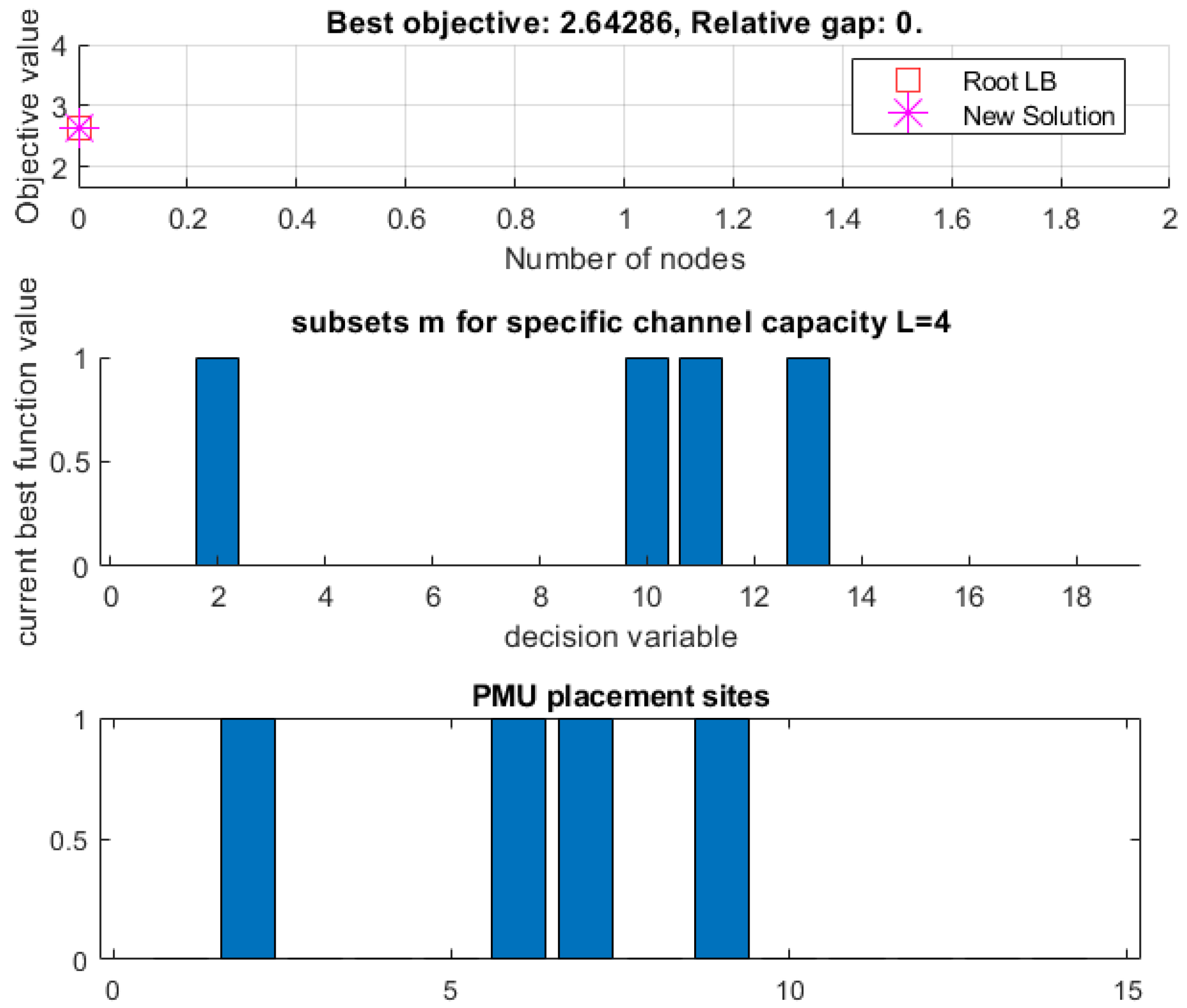
| 1 : 2.64286E+00 0.00 2.64286E+00 0 0s Poor lower bound |
| * Finished. Cost: 2.6429 (lower bound: 2.6429, relative gap 0%) |
| * Termination with all nodes pruned |
| * Timing: 27% spent in upper solver (1 problems solved) |
| * 12% spent in lower solver (1 problems solved) |
| * 1% spent in LP-based domain reduction (0 problems solved) |
| * 1% spent in upper heuristics (0 candidates tried) |
| Columns 1 through 15 |
| 0 1 0 0 0 0 0 0 0 1 1 0 1 0 0 |
| Columns 16 through 18 |
| 0 0 0 |
| 2 10 11 13 |
7. Results
8. Discussion
9. Final Remarks and Future Study
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| + Processing objective function |
| + Processing constraints |
| + Branch and bound started |
| * Starting YALMIP global branch & bound. |
| * Upper solver : MOSEK |
| * Lower solver : MOSEK |
| * LP solver : MOSEK |
| * -Extracting bounds from model |
| * -Performing root-node bound propagation |
| * -Calling upper solver + Calling Mosek |
| (no solution found) |
| * -Branch-variables : 0 |
| * -More root-node bound-propagation |
| * -Performing LP-based bound-propagation |
| * -And some more root-node bound-propagation |
| * Starting the b&b process |
| Node Upper Gap (%) Lower Open Time |
| + Calling MOSEK |
| 1 : 1.00000E+01 0.00 1.00000E+01 0 0s Solution found by heuristics |
| * Finished. Cost: 10 (lower bound: 10, relative gap 0%) |
| * Termination with all nodes pruned |
| * Timing: 33% spent in upper solver (2 problems solved) |
| * 16% spent in lower solver (1 problems solved) |
| * 1% spent in LP-based domain reduction (0 problems solved) |
| * 3% spent in upper heuristics (1 candidates tried) |
| ans = |
| 1 5 42 43 58 61 70 75 77 79 |
| Optimal PMU numbers: 10 |
| best function value: 10 |
| L | nPMU | PMU Locations | PMU Channels |
|---|---|---|---|
| 4 | 10 | 1, 2, 6, 9, 10, 12, 18, 23, 25, 27 | {1-2, 1-3} {2-5, 2-7} {6-8, 6-28} {9-6, 9-10, 9-11} {10-17, 10-20, 10-21, 10-22} {12-4, 12-13, 12-14, 12-16} {18-15, 18-19} {23-25, 23-24} {25-24, 25-26, 25-27} {27-25, 27-28, 27-29, 27-30} |
| + Solver chosen : BMIBNB |
| + Processing objective function |
| + Processing constraints |
| + Branch and bound started |
| * Starting YALMIP global branch & bound. |
| * Upper solver : MOSEK |
| * Lower solver : MOSEK |
| * LP solver : MOSEK |
| * -Extracting bounds from model |
| * -Performing root-node bound propagation |
| * -Calling upper solver + Calling Mosek |
| (no solution found) |
| * -Branch-variables : 0 |
| * -More root-node bound-propagation |
| * -Performing LP-based bound-propagation |
| * -And some more root-node bound-propagation |
| * Starting the b&b process |
| Node Upper Gap (%) Lower Open Time |
| + Calling MOSEK |
| 1 : 8.46667E+00 0.00 8.46667E+00 0 0s Solution found by heuristics |
| * Finished. Cost: 8.4667 (lower bound: 8.4667, relative gap 0%) |
| * Termination with all nodes pruned |
| * Timing: 45% spent in upper solver (2 problems solved) |
| * 21% spent in lower solver (1 problems solved) |
| * 1% spent in LP-based domain reduction (0 problems solved) |
| * 2% spent in upper heuristics (1 candidates tried) |
| ans = |
| 2 4 6 43 58 61 67 70 77 79 |
| Optimal PMU numbers: 10 |
| best function value: 8.466667e+00 |
| L | nPMU | PMU Locations | PMU Channels |
|---|---|---|---|
| 4 | 10 | 2, 4, 6, 9, 10, 12, 15, 18, 25, 27 | {2-1, 2-4, 2-5, 2-6} {4-2, 4-3, 4-6, 4-12} {6-2, 6-4, 6-7, 6-8} {9-6, 9-10, 9-11} {10-17, 10-20, 10-21, 10-22} {12-4, 12-13, 12-14, 12-16} {15-12, 15-14, 15-18, 15-23} {18-15, 18-19} {25-24, 25-26, 25-27} {27-25, 27-28, 27-29, 27-30} |
| Mixed-Integer Nonlinear Program (MINLP) Optimization |
| min f(x) |
| s.t. lb <= x <= ub |
| cl <= c(x) <= cu |
| xi = Integer/Binary |
| Problem Properties: |
| # Decision Variables: 82 |
| # Constraints: 276 |
| # Bounds: 164 |
| # Binary Variables: 82 |
| # Nonlinear Equality: 30 |
| Solver Parameters: |
| Solver: SCIP |
| Objective Gradient: @(x)mklJac(fun,x) |
| Constraint Jacobian: @(x)mklJac(nlcon,x) |
| Jacobian Structure: Supplied |
| time | node | left |LP iter|LP it/n| mem |mdpt |frac |vars |cons |cols |rows |cuts |confs|strbr| dual bound | primal bound | gap |
| T 0.1s| 1 | 0 | 0 | - |2520k| 0 | - | 690 | 942 | 690 | 637 | 0 | 0 | 0 | -- |6.500000e+001 | Inf |
| b 0.1s| 1 | 0 | 0 | - |2457k| 0 | - | 690 | 942 | 690 | 637 | 0 | 0 | 0 | -- |1.800000e+001 | Inf |
| 0.1s| 1 | 0 | 307 | - |2453k| 0 | 7 | 690 | 942 | 690 | 637 | 0 | 0 | 0 |1.000000e+001 |1.800000e+001 | 80.00 |
| 0.1s| 1 | 0 | 324 | - |2542k| 0 | 13 | 690 | 942 | 690 | 641 | 4 | 0 | 0 |1.000000e+001 |1.800000e+001 | 80.00 |
| 0.1s| 1 | 0 | 327 | - |2612k| 0 | 0 | 690 | 942 | 690 | 643 | 6 | 0 | 0 |1.000000e+001 |1.800000e+001 | 80.00 |
| * 0.1s| 1 | 0 | 327 | - |2620k| 0 | - | 690 | 942 | 690 | 643 | 6 | 0 | 0 |1.000000e+001 |1.000000e+001 | 0.00 |
| SCIP Status : problem is solved [optimal solution found] |
| Solving Time (sec) : 0.12 |
| Solving Nodes : 1 |
| Primal Bound : +1.00000000000000e+001 (3 solutions) |
| Dual Bound : +1.00000000000000e+001 |
| Gap : 0.00 |
| 1 2 18 43 58 64 67 71 77 82 |
| Optimal PMU numbers: 10 |
| best function value: 10 |
| BBNodes: 1 |
| BBGap: 0 |
| Time: 0.5361 |
| Algorithm: ‘SCIP: Spatial Branch and Bound using IPOPT and SoPlex’ |
| Status: ‘Globally Integer Optimal’ |
| L | nPMU | PMU Locations | PMU Channels |
|---|---|---|---|
| 4 | 10 | 1, 2, 6, 9, 10, 12, 15, 19, 25, 27 | {1-2, 1-3} {2-1, 2-4, 2-5, 2-6} {6-2, 6-7, 6-8, 6-28} {9-6, 9-10, 9-11} {10-17, 10-20, 10-21, 10-22} {12-13, 12-14, 12-15, 12-16} {15-12, 15-14, 15-18, 15-23} {19-18, 19-20} {25-24, 25-26, 25-27} {27-29, 27-30} |
| Mixed-Integer Nonlinear Program (MINLP) Optimization |
| min f(x) |
| s.t. lb <= x <= ub |
| cl <= c(x) <= cu |
| xi = Integer/Binary |
| Problem Properties: |
| # Decision Variables: 82 |
| # Constraints: 276 |
| # Bounds: 164 |
| # Binary Variables: 82 |
| # Nonlinear Equality: 30 |
| Solver Parameters: |
| Solver: SCIP |
| Objective Gradient: @(x)mklJac(fun,x) |
| Constraint Jacobian: @(x)mklJac(nlcon,x) |
| Jacobian Structure: Supplied |
| time | node | left |LP iter|LP it/n| mem |mdpt |frac |vars |cons |cols |rows |cuts |confs|strbr| dual bound | primal bound | gap |
| T 0.1s| 1 | 0 | 0 | - |2550k| 0 | - | 690 | 942 | 690 | 637 | 0 | 0 | 0 | -- |5.540000e+001 | Inf |
| b 0.2s| 1 | 0 | 0 | - |2487k| 0 | - | 690 | 942 | 690 | 637 | 0 | 0 | 0 | -- |1.560000e+001 | Inf |
| * 0.2s| 1 | 0 | 319 | - |2492k| 0 | - | 690 | 942 | 690 | 637 | 0 | 0 | 0 |8.466667e+000 |8.466667e+000 | 0.00 |
| 0.2s| 1 | 0 | 319 | - |2492k| 0 | - | 690 | 942 | 690 | 637 | 0 | 0 | 0 |8.466667e+000 |8.466667e+000 | 0.00 |
| SCIP Status : problem is solved [optimal solution found] |
| Solving Time (sec) : 0.17 |
| Solving Nodes : 1 |
| Primal Bound : +8.46666666666667e+000 (3 solutions) |
| Dual Bound : +8.46666666666667e+000 |
| Gap : 0.00 |
| 2 4 18 43 56 64 67 72 77 79 |
| Optimal PMU numbers: 10 |
| BBNodes: 1 |
| BBGap: 0 |
| Time: 0.3718 |
| Algorithm: ‘SCIP: Spatial Branch and Bound using IPOPT and SoPlex’ |
| Status: ‘Globally Integer Optimal’ |
| L | nPMU | PMU Locations | PMU Channels |
|---|---|---|---|
| 4 | 10 | 2, 4, 6, 9, 10, 12, 15, 20, 25, 27 | {2-1, 2-4, 2-5, 2-6} {4-2, 4-3, 4-6, 4-12} {6-2, 6-7, 6-8, 6-28} {9-6, 9-10, 9-11} {10-9, 10-17, 10-21, 10-22} {12-13, 12-14, 12-15, 12-16} {15-12, 15-14, 15-18, 15-23} {20-10, 20-19} {25-24, 25-26, 25-27} {27-25, 27-28, 27-29, 27-30} |
| Binary Swarm Optimization | |||
|---|---|---|---|
| L | nPMU | PMU Locations | PMU Channels |
| 4 | 10 | 1, 2, 6, 10, 11, 12, 19, 24, 26, 29 | {1-2, 1-3 {2-1, 2-4, 2-5, 2-6 {6-7, 6-8, 6-9, 6-28 {10-6, 10-17, 10-21, 10-22 {11-9 {12-13, 12-14, 12-15, 12-16 {19-18, 19-20 {24-22, 24-23, 24-25 {26-25 {29-27, 29-30} |
| 4 | 10 | 2, 4, 6, 9, 10, 12, 15, 18, 25, 27 | {2-1, 2-4, 2-5, 2-6 {4-2, 4-3, 4-6, 4-12 {6-2, 6-7, 6-8, 6-28 {9-6, 9-10, 9-11 {10-17, 10-20, 10-21, 10-22 {12-4, 12-13, 12-15, 12-16 {15-12, 15-14, 15-18, 15-23 {18-15, 18-19 {25-24, 25-26, 25-27 {27-29, 27-30} |
| Genetic Algorithms | |||
| 4 | 10 | 3, 6, 7, 10, 11, 12, 15, 19, 25, 29 | {3-1, 3-4 {6-2, 6-8, 6-9, 6-28 {7-5, 7-6 {10-17, 10-20, 10-21, 10-22 {11-9 {12-4, 12-13, 12-15, 12-16 {15-12, 15-14, 15-18, 15-23 {19-20, 19-18 {25-24, 25-26, 25-27 {29-27, 29-30} |
| 4 | 10 | 2, 4, 6, 9, 10, 12, 15, 19, 25, 27 | {2-1, 2-4, 2-5, 2-6 {4-2, 4-3, 4-6, 4-12 {6-4, 6-7, 6-8, 6-28 {9-6, 9-10, 9-11 {10-17, 10-20, 10-21, 10-22 {12-13, 12-14, 12-15, 12-16 {15-12, 15-14, 15-18, 15-23 {19-18, 19-20 {25-24, 25-26, 25-27 {27-25, 27-28, 27-29, 27-30} |
| Sequential Quadratic Programming | |||
| L | nPMU | PMU locations | PMU channels |
| 3 | 10 | 1, 7, 8, 10, 11, 12, 15, 20, 25, 29 | {1-2, 1-3 {7-5, 7-6 {8-6, 8-28 {10-17, 10-21, 10-22 {11-9 {12-4, 12-13, 12-16 {15-14, 15-18, 15-23 {20-10, 20-19 {25-24, 25-26, 25-27 {29-27, 29-30} |
| 4 | 10 | 3, 5, 10, 11, 12, 19, 23, 26, 27, 28 | {3-1, 3-4 {5-2, 5-7 {10-17, 10-20, 10-21, 10-22 {11-9 {12-13, 12-14, 12-15, 12-16 {19-18, 19-20 {23-15, 23-24 {26-25 {27-25, 27-28, 27-29, 27-30 {28-6, 28-8, 28-27} |
| Interior-Point Methods | |||
| 3 | 10 | 1, 5, 8, 10, 11, 12, 19, 23, 26, 29 | {1-3, 1-4 {5-2, 5-7 {8-6, 8-28 {10-17, 10-21, 10-22 {11-9 {12-13, 12-14, 12-16 {19-18, 19-20 {23-15, 23-24 {26-25 {29-27, 29-30} |
| 4 | 10 | 2, 4, 6, 10, 11, 12, 19, 23, 25, 27 | {2-1, 2-4, 2-5, 2-6 {4-2, 4-3, 4-6, 4-12 {6-2, 6-7, 6-8, 6-28 {10-6, 10-17, 10-21, 10-22 {11-9 {12-13, 12-14, 12-15, 12-16 {19-18, 19-20 {23-15, 23-24 {25-24, 25-26, 25-27 {27-25, 27-28, 27-29, 27-30} |
| Generalized Pattern Search Algorithm | |||
| 3 | 10 | 2, 4, 6, 10, 11, 12, 19, 23, 25, 27 | {2-1, 2-4, 2-5 {4-2, 4-3, 4-6 {6-7, 6-8, 6-28 {10-17, 10-21, 10-22 {11-9 {12-13, 12-14, 12-16 {19-18, 19-20 {23-15, 23-24 {25-24, 25-26, 25-27 {27-25, 27-29, 27-30} |
| 4 | 10 | 1, 2, 6, 10, 11, 12, 18, 24, 25, 29 | {1-2, 1-3 {2-1, 2-4, 2-5, 2-6 {6-7, 6-8, 6-10, 6-28 {10-17, 10-20, 10-21, 10-22 {11-9 {12-13, 12-14, 12-15, 12-16 {18-15, 18-19 {24-22, 24-23, 24-25 {25-24, 25-26, 25-27 {29-27, 29-30} |
| Genetic Algorithms | |||
| 3 | 10 | 3, 5, 8, 10, 11, 12, 18, 24, 26, 27 | {3-1, 3-4 {5-2, 5-7 {8-6, 8-28 {10-17, 10-20, 10-21 {11-9 {12-13, 12-14, 12-16 {18-15, 18-19 {24-22, 24-23, 24-25 {26-25 {27-25, 27-29, 27-30} |
| Genetic Algorithms | |||
| 4 | 10 | 2, 3, 6, 9, 10, 12, 15, 19, 25, 27 | {2-1, 2-4, 2-5, 2-6 {3-1, 3-4 {6-4, 6-7, 6-8, 6-9 {9-6, 9-10, 9-11 {10-9, 10-17, 10-21, 10-22 {12-4, 12-13, 12-15, 12-16 {15-12, 15-14, 15-18, 15-23 {19-18, 19-20 {25-24, 25-26, 25-27 {27-25, 27-28, 27-29, 27-30} |
| Binary Particle Swarm Optimization | |||
| 3 | 10 | 2, 4, 6, 9, 10, 12, 18, 24, 26, 29 | {2-1, 2-4, 2-5 {4-2, 4-3, 4-12 {6-7, 6-8, 6-28 {9-6, 9-10, 9-11 {10-17, 10-20, 10-21 {12-13, 12-14, 12-16 {18-15, 18-19 {24-22, 24-23, 24-25 {26-25 {29-27, 29-30} |
| 4 | 10 | 3, 6, 7, 9, 10, 12, 18, 24, 26, 29 | {3-1, 3-4 {6-2, 6-8, 6-9, 6-28 {7-5, 7-6 {9-6, 9-10, 9-11 {10-6, 10-17, 10-20, 10-21 {12-13, 12-14, 12-15, 12-16 {18-15, 18-19 {24-22, 24-23, 24-25 {26-25 {29-27, 29-30} |
| CBC Branch and Cut Algorithm | |||
| 3 | 10 | 2, 4, 6, 9, 10, 12, 18, 24, 25, 27 | {2-1, 2-4, 2-5 {4-2, 4-3, 4-6 {6-2, 6-7, 6-8 {9-6, 9-10, 9-11 {10-17, 10-20, 10-21 {12-13, 12-14, 12-16 {18-15, 18-19 {24-22, 24-23, 24-25 {25-24, 25-26, 25-27 {27-28, 27-29, 27-30} |
| 4 | 10 | 2, 4, 6, 9, 10, 12, 15, 19, 25, 27 | {2-1, 2-4, 2-5, 2-6 {4-2, 4-3, 4-6, 4-12 {6-2, 6-7, 6-8, 6-10 {9-6, 9-10, 9-11 {10-6, 10-17, 10-21, 10-22 {12-13, 12-14, 12-15, 12-16 {15-12, 15-14, 15-18, 15-23 {19-18, 19-20 {25-24, 25-26, 25-27 {27-25, 27-28, 27-29, 27-30} |
| SCIP Spatial Branch-and-Bound Algorithm | |||
| 3 | 10 | 3, 5, 6, 9, 10, 12, 15, 19, 25, 27 | {3-1, 3-4 5-2, 5-7 6-4, 6-7, 6-8 9-6, 9-10, 9-11 10-17, 10-21, 10-22 12-13, 12-15, 12-16 15-12, 15-14, 15-23 19-18, 19-20 25-24, 25-26, 25-57 27-28, 27-29, 27-30} |
| 4 | 10 | 3, 5, 6, 9, 10, 12, 15, 18, 25, 27 | {3-1, 3-4 5-2, 5-7 6-2, 6-4, 6-7, 6-8 9-6, 9-10, 9-11 10-17, 10-20, 10-21, 10-22 12-13, 12-14, 12-15, 12-16 15-12, 15-14, 15-18, 15-23 18-15, 18-19 25-24, 25-26, 25-27 27-25, 27-28, 27-29, 27-30} |
| Gurobi: Branch-and-Bound Algorithm | |||
| 3 | 10 | 2, 3, 6, 9, 10, 12, 18, 24, 26, 27 | {2-1, 2-5, 2-6 3-1, 3-4 6-7, 6-8, 6-28 9-6, 9-10, 9-11 10-17, 10-20, 10-21 12-13, 12-14, 12-16 18-15, 18-19 24-22, 24-23, 24-25 26-25 27-25, 27-29, 27-30} |
| 4 | 10 | 1, 2, 6, 9, 10, 12, 18, 24, 25, 27 | {1-2, 1-3 2-1, 2-4, 2-5, 2-6 6-7, 6-8, 6-9, 6-10 9-6, 9-10, 9-11 10-17, 10-20, 10-21, 10-22 12-4, 12-13, 12-14, 12-16 18-15, 18-19 24-22, 24-23, 24-25 25-24, 25-26, 25-27 27-25, 27-28, 27-29, 27-30} |
| MOSEK: Branch-and-Bound Algorithm | |||
| 3 | 10 | 1, 2, 6, 9, 10, 12, 15, 20, 25, 27 | {1-2, 1-3 2-1, 2-5, 2-6 6-4, 6-7, 6-8 9-6, 9-10, 9-11 10-17, 10-21, 10-22 12-13, 12-14, 12-16 15-12, 15-18, 15-23 20-10, 20-19 25-24, 25-26, 25-27 27-28, 27-29, 27-30} |
| 4 | 10 | 1, 5, 6, 9, 10, 12, 18, 23, 25, 27 | {1-2, 1-3 5-2, 5-7 6-8, 6-28 9-6, 9-10, 9-11 10-17, 10-20, 10-21, 10-22 12-4, 12-13, 12-14, 12-16 18-15, 18-19 23-15, 23-24 25-24, 25-26, 25-27 27-25, 27-28, 27-29, 27-30} |
| GLPK: Revised Simplex to Build the BBA Tree | |||
| 3 | 10 | 2, 4, 6, 10, 11, 12, 19, 23, 25, 27 | {2-1, 2-4, 2-5 4-2, 4-3, 4-6 6-7, 6-8, 6-28 10-17, 10-21, 10-22 11-9 12-13, 12-14, 12-16 19-18, 19-20 23-15, 23-24 25-24, 25-26, 25-27 27-25, 27-29, 27-30} |
| 4 | 10 | 3, 5, 6, 9, 10, 12, 18, 24, 26, 29 | {3-1, 3-4 5-2, 5-7 6-2, 6-7, 6-8, 6-28 9-6, 9-10, 9-11 10-9, 10-17, 10-20, 10-21 12-4, 12-13, 12-14, 12-16 18-15, 18-19 24-22, 24-23, 24-25 26-25 29-27, 29-30} |
| GLPK: Revised Simplex to Build the BBA Tree | |||
| Optimizing the b-objective function leading to a set with increased redundancy | |||
| 3 | 10 | 2, 4, 6, 9, 10, 12, 15, 20, 25, 27 | {2-1, 2-4, 2-5 4-2, 4-3, 4-6 6-7, 6-8, 6-28 9-6, 9-10, 9-11 10-17, 10-21, 10-22 12-4, 12-13, 12-16 15-14, 15-18, 15-23 20-10, 20-19 25-24, 25-26, 25-27 27-25, 27-29, 27-30 |
| 4 | 10 | 2, 4, 6, 9, 10, 12, 15, 18, 25, 27 | {2-1, 2-4, 2-5, 2-6 4-2, 4-3, 4-6, 4-12 6-2, 6-7, 6-8, 6-28 9-6, 9-10, 9-11 10-17, 10-20, 10-21, 10-22 12-4, 12-13, 12-14, 12-16 15-12, 15-14, 15-18, 15-23 18-15, 18-19 25-24, 25-26, 25-27 27-25, 27-28, 27-29, 27-30} |
| GLPK: Revised Simplex to Build the BBA Tree | |||
| Optimizing the b-objective function leading to a set with increased redundancy | |||
| 3 | 10 | 2, 4, 6, 9, 10, 12, 15, 20, 25, 27 | {2-1, 2-4, 2-5 4-2, 4-3, 4-6 6-7, 6-8, 6-28 9-6, 9-10, 9-11 10-17, 10-21, 10-22 12-4, 12-13, 12-16 15-14, 15-18, 15-23 20-10, 20-19 25-24, 25-26, 25-27 27-25, 27-29, 27-30 |
| 4 | 10 | 2, 4, 6, 9, 10, 12, 15, 18, 25, 27 | {2-1, 2-4, 2-5, 2-6 4-2, 4-3, 4-6, 4-12 6-2, 6-7, 6-8, 6-28 9-6, 9-10, 9-11 10-17, 10-20, 10-21, 10-22 12-4, 12-13, 12-14, 12-16 15-12, 15-14, 15-18, 15-23 18-15, 18-19 25-24, 25-26, 25-27 27-25, 27-28, 27-29, 27-30} |
References
- Phadke, A.G.; Thorp, J.S. Synchronized Phasor Measurements and Their Applications, 2nd ed.; Springer: New York, NY, USA, 2017. [Google Scholar]
- Darmis, O.; Korres, G. A Survey on Hybrid SCADA/WAMS State Estimation Methodologies in Electric Power Transmission Systems. Energies 2023, 16, 618. [Google Scholar] [CrossRef]
- Monti, A.; Sadu, A.; Tang, J. Chapter 8—Wide Area Measurement Systems: Applications. In Phasor Measurement Units and Wide Area Monitoring Systems; Academic Press: Cambridge, MA, USA, 2016; pp. 177–234. [Google Scholar]
- Cheng, G.; Lin, Y.; Abur, A.; Gómez-Expósito, A.; Wu, W. A Survey of Power System State Estimation Using Multiple Data Sources: PMUs, SCADA, AMI, and Beyond. IEEE Trans. Smart Grid 2024, 15, 1129–1151. [Google Scholar] [CrossRef]
- Varghese, C.H.; Shah, B.; Azimian, B.; Pal, A.; Farantatos, E. Deep Neural Network-Based State Estimator for Transmission System Considering Practical Implementation Challenges. J. Mod. Power Syst. Clean Energy 2024. early access. [Google Scholar]
- Todescato, M.; Carli, R.; Schenato, L.; Barchi, G. Smart Grid State Estimation with PMUs Time Synchronization Errors. Energies 2020, 13, 5148. [Google Scholar] [CrossRef]
- Johnson, T.; Moger, T. A critical review of methods for optimal placement of phasor measurement units. Int. Trans. Electr. Energy Syst. 2020, 31, e12698. [Google Scholar] [CrossRef]
- Ahmed, M.M.; Amjad, M.; Qureshi, M.A.; Imran, K.; Haider, Z.M.; Khan, M.O. A Critical Review of State-of-the-Art Optimal PMU Placement Techniques. Energies 2022, 15, 2125. [Google Scholar] [CrossRef]
- Biswal, C.; Sahu, B.K.; Mishra, M.; Rout, P.K. Real-Time Grid Monitoring and Protection: A Comprehensive Survey on the Advantages of Phasor Measurement Units. Energies 2023, 16, 4054. [Google Scholar] [CrossRef]
- Paramo, G.; Bretas, A.; Meyn, S. Research Trends and Applications of PMUs. Energies 2022, 15, 5329. [Google Scholar] [CrossRef]
- Menezes, T.S.; Barra, P.H.A.; Dizioli, F.A.S.; Lacerda, V.A.; Fernandes, R.A.S.; Coury, D.V. A Survey on the Application of Phasor Measurement Units to the Protection of Transmission and Smart Distribution Systems. Electr. Power Compon. Syst. 2023, 1, 1–18. [Google Scholar] [CrossRef]
- Fotopoulou, M.; Petridis, S.; Karachalios, I.; Rakopoulos, D. A Review on Distribution System State Estimation Algorithms. Appl. Sci. 2022, 12, 11073. [Google Scholar] [CrossRef]
- Wolsey, L.A. Integer Programming; John Willey and Sons: Hoboken, NJ, USA, 2020. [Google Scholar] [CrossRef]
- Conforti, M.; Cornuéjols, G.; Zambelli, G. Integer Programming, Graduate Texts in Mathematics; Springer: Berlin/Heidelberg, Germany, 2014; Volume 271. [Google Scholar]
- Chen, D.S.; Batson, R.G.; Dang, Y. Applied Integer Programming: Modelling and Solution; John Wiley and Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- Sarma, E.; Xedoses, P.; Doksa, H. Springer optimization and its applications (Springer) Literature review. In Multicriteria Portfolio Construction with Python; Springer: Berlin/Heidelberg, Germany, 2020; Volume 163. [Google Scholar]
- Ganian, R.; Ordyniak, S. Solving Integer Linear Programs by Exploiting Variable-Constraint Interactions: A Survey. Algorithms 2019, 12, 248. [Google Scholar] [CrossRef]
- Brajević, I. A Shuffle-Based Artificial Bee Colony Algorithm for Solving Integer Programming and Minimax Problems. Mathematics 2021, 9, 1211. [Google Scholar] [CrossRef]
- Durenberger, D.G.; Yonge, Y. Linear and Nonlinear Programming, 3rd ed.; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Necedah, J.; Wright, S. Numerical Optimization; Springer Series in Operations Research and Financial Engineering; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Chinneck, J.W. Feasibility and Infeasibility in Optimization: Algorithms and Computational Methods; International Series in Operations Research & Management Science; Springer: Cham, Switzerland, 2008. [Google Scholar]
- Rios, L.M.; Sahinidis, N.V. Derivative-Free Optimization: A Review of Algorithms and Comparison of Software Implementations. J. Glob. Optim. 2013, 56, 1247–1293. [Google Scholar] [CrossRef]
- Sahinidis, N.V. Mixed-Integer Nonlinear Programming 2018; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Liberti, L.; Maculan, N. Global Optimization: From Theory to Implementation, Nonconvex Optimization and Its Applications; Springer: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Yang, X.S. Engineering Optimization: An Introduction with Metaheuristic Applications; Wiley: Hoboken, NJ, USA, 2010. [Google Scholar]
- Özlü, İ.A.; Baimakhanov, O.; Saukhimov, A.; Ceylan, O. A Heuristic Methods-Based Power Distribution System Optimization Toolbox. Algorithms 2022, 15, 14. [Google Scholar] [CrossRef]
- Nardin, A.; D’Andreagiovanni, F. A Quantum-Inspired Ant Colony Optimization Algorithm for Parking Lot Rental to Shared E-Scooter Services. Algorithms 2024, 17, 80. [Google Scholar] [CrossRef]
- Diestel, R. Graph Theory; Springer: Berlin/Heidelberg, Germany, 2017; Volume 173, pp. 59–172. [Google Scholar]
- Haynes, T.W.; Hedetniemi, S.M.; Hedetniemi, S.T.; Henning, M.A. Domination in Graphs Applied to Electric Power Networks. SIAM J. Discret. Math. 2002, 15, 519–529. [Google Scholar] [CrossRef]
- Sun, O.; Fan, N. The probabilistic and reliable connected power dominating set problems. Optim. Lett. 2019, 13, 1189–1206. [Google Scholar] [CrossRef]
- Poirion, P.L.; Toubaline, S.; D’Ambrosio, C.; Liberti, L. The power edge set problem. Networks 2016, 68, 104–120. [Google Scholar] [CrossRef]
- Xu, B.; Abur, A. Observability Analysis and Measurement Placement for Systems with PMUs. In Proceedings of the IEEE PES Power Systems Conference and Exposition, New York, NY, USA, 10–13 October 2004; pp. 2–5. [Google Scholar]
- Dua, D.; Dambhare, S.; Gajbhiye, R.K.; Soman, S.A. Optimal Multistage Scheduling of PMU Placement: An ILP Approach. IEEE Trans. Power Deliv. 2008, 23, 1812–1820. [Google Scholar] [CrossRef]
- Pal, A.; Sánchez, A.G.A.; Thorp, J.S.; Centeno, V.A. A Community-based Partitioning Approach for phasor Measurement Unit Placement in Large systems. Electr. Power Compon. Syst. 2016, 44, 1317–1329. [Google Scholar] [CrossRef]
- Pal, A.; Vullikanti, A.K.S.; Ravi, S.S. A PMU Placement Scheme Considering Realistic Costs and Modern Trends in Relaying. IEEE Trans. Power Syst. 2017, 32, 552–561. [Google Scholar] [CrossRef]
- Ghamsari-Yazdel, M.; Esmaili, M.; Amjady, N. Optimal substation-based joint allocation of PMUs and measuring channels considering network expansion planning. Int. J. Electr. Power Energy Syst. 2019, 106, 274–287. [Google Scholar] [CrossRef]
- Theodorakatos, N.P.; Babu, R.; Moschoudis, A.P. The branch-and-bound algorithm in optimizing mathematical programming models to achieve power grid observability. Axioms 2023, 12, 1040. [Google Scholar] [CrossRef]
- Theodorakatos, N.P.; Moschoudis, A.P.; Babu, R. Calculating Global Minimum Points to Binary Polynomial Optimization Problem: Optimizing the Optimal PMU Localization Problem as a Case-Study. J. Phys. Conf. Ser. 2024, 2701, 012001. [Google Scholar] [CrossRef]
- Pal, A.; Jones, K.D.; Mishra, C.; Centeno, V.A. Binary particle swarm optimisation-based optimal substation coverage algorithm for phasor measurement unit installations in practical systems. IET Gener. Transm. Distrib. 2016, 10, 555–562. [Google Scholar]
- Korres, G.N.; Manousakis, N.M.; Xygkis, T.C.; Lofberg, J. Optimal phasor measurement unit placement for numerical observability in the presence of conventional measurement using semi-definite programming. IET Gener. Transm. Distrib. 2015, 9, 2427–2436. [Google Scholar] [CrossRef]
- Theodorakatos, N.P.; Lytras, M.; Babu, R. A Generalized Pattern Search Algorithm Methodology for solving an Under-Determined System of Equality Constraints to achieve Power System Observability using Synchrophasors. J. Phys. Conf. Ser. 2021, 2090, 012125. [Google Scholar] [CrossRef]
- Theodorakatos, N.P.; Lytras, M.D.; Moschoudis, A.P.; Kantoutsis, K.T. Implementation of optimization-based algorithms for maximum power system observability using synchronized measurements. AIP Conf. Proc. 2023, 2872, 120006. [Google Scholar]
- Xia, N.; Gooi, H.B.; Chen, S.X.; Wang, M.Q. Redundancy based PMU placement in state estimation. Sustain. Energy Grids Netw. 2015, 2, 23–31. [Google Scholar] [CrossRef]
- Ramasamy, S.; Koodalsamy, B.; Koodalsamy, C.; Veerayan, M.B. Realistic method for placement of phasor measurement units through optimization problem formulation with conflicting objectives. Electr. Power Compon. Syst. 2021, 49, 474–487. [Google Scholar] [CrossRef]
- Singh, S.P.; Singh, S.P. A Multi-objective PMU Placement Method in Power System via Binary Gravitational Search Algorithm. Electr. Power Compon. Syst. 2017, 45, 1832–1845. [Google Scholar] [CrossRef]
- Koutsoukis, N.C.; Manousakis, N.M.; Georgilakis, P.S.; Korres, G.N. Numerical observability method for optimal phasor measurement units placement using recursive Tabu search method. IET Gener. Transm. Distrib. 2013, 7, 347–356. [Google Scholar] [CrossRef]
- Hanis, N.; Rahman, A.; Zobaa, A.F. Binary PSO Algorithm for Optimal PMUs Placement. IEEE Trans. Ind. Inform. 2017, 13, 3124–3133. [Google Scholar]
- Maji, T.K.; Acharjee, P. Multiple Solutions of Optimal PMU Placement Using Exponential Binary PSO Algorithm for Smart Grid Applications. IEEE Trans. Ind. Appl. 2017, 53, 2550–2559. [Google Scholar] [CrossRef]
- Dalali, M.; Karegar, H.K. Optimal PMU placement for full observability of the power network with maximum redundancy using modified binary cuckoo optimization algorithm. IET Gener. Transm. Distrib. 2016, 10, 2817–2824. [Google Scholar] [CrossRef]
- Müller, H.H.; Castro, C.A. Genetic algorithm-based phasor measurement unit placement method considering observability and security criteria. IET Gener. Transm. Distrib. 2016, 10, 270–280. [Google Scholar] [CrossRef]
- Theodorakatos, N.P.; Moschoudis, A.P.; Lytras, M.D.; Kantoutsis, K.T. Research on optimization procedure of PMU positioning problem achieving maximum observability based on heuristic algorithms. AIP Conf. Proc. 2023, 2872, 120032. [Google Scholar]
- Rezaeian Koochi, M.H.; Dehghanian, P.; Esmaeili, S. PMU Placement with Channel Limitation for Faulty Line Detection in Transmission Systems. IEEE Trans. Power Deliv. 2020, 35, 819–827. [Google Scholar] [CrossRef]
- Tshenyego, O.; Samikannu, R.; Mtengi, B.; Mosalaosi, M.; Sigwele, T. A Graph-Theoretic Approach for Optimal Phasor Measurement Units Placement Using Binary Firefly Algorithm. Energies 2023, 16, 6550. [Google Scholar] [CrossRef]
- Rather, Z.H.; Chen, Z.; Thøgersen, P.; Lund, P.; Kirby, B. Realistic Approach for Phasor Measurement Unit Placement: Consideration of Practical Hidden Costs. IEEE Trans. Power Deliv. 2015, 30, 3–15. [Google Scholar] [CrossRef]
- Singh, S.P.; Singh, S.P. Optimal cost wide area measurement system incorporating communication infrastructure. IET Gener. Transm. Distrib. 2017, 11, 2814–2821. [Google Scholar] [CrossRef]
- Korkali, M.; Abur, A. Placement of PMUs with Channel Limits. In Proceedings of the 2009 IEEE Power & Energy Society General Meeting, Calgary, AB, Canada, 26–30 July 2009. [Google Scholar]
- Korkali, M. Robust wide-area fault visibility and structural observability in power systems with synchronized measurement units. In Advances in Electric Power and Energy: Static State Estimation; IEEE: New York, NY, USA, 2020; pp. 209–230. [Google Scholar]
- Korkali, M.; Abur, A. Impact of network sparsity on strategic placement of phasor measurement units with fixed channel capacity. In Proceedings of the 2010 IEEE International Symposium on Circuits and Systems, Paris, France, 30 May–2 June 2010; pp. 3445–3448. [Google Scholar]
- Baba, M.; Nor, N.B.M.; Aman Sheikh, M.; Irfan, M.; Tahir, M. A Strategic and Significant Method for the Optimal Placement of Phasor Measurement Unit for Power System Network. Symmetry 2020, 12, 1174. [Google Scholar] [CrossRef]
- Fan, N.; Watson, J.P. On integer programming models for the multi-channel PMU placement problem and their solution. Energy Syst. 2014, 6, 1–19. [Google Scholar] [CrossRef]
- Emami, R.; Abur, A. Robust measurement design by placing synchronized phasor measurements on network branches. IEEE Trans. Power Syst. 2010, 25, 38–43. [Google Scholar] [CrossRef]
- Andic, C.; Ozturk, A.; Turkay, B. Power system state estimation using a robust crow search algorithm based on PMUs with limited number of channels. Electr. Power Syst. Res. 2023, 217, 109126. [Google Scholar] [CrossRef]
- Shafiullah, M.; Hossain, M.I.; Abido, M.A.; Abdel-Fattah, T.; Mantawy, A.H. A Modified Optimal PMU Placement Problem Formulation Considering Channel Limits under Various Contingencies. Measurement 2019, 135, 875–885. [Google Scholar] [CrossRef]
- Manousakis, N.M.; Korres, G.N. Optimal placement of PMUS considering scada measurements and fixed channel capacity by semidefinite programming. In Proceedings of the MedPower 2014, Athens, Greece, 2–5 November 2014; pp. 1–6. [Google Scholar]
- Manousakis, N.M.; Korres, G.N. Optimal PMU placement for numerical observability considering fixed channel capacity—A semidefinite programming approach. IEEE Trans. Power Syst. 2016, 31, 3328–3329. [Google Scholar] [CrossRef]
- Manousakis, N.M.; Korres, G.N. Semidefinite programming for optimal placement of PMUs with channel limits considering pre-existing SCADA and PMU measurements. In Proceedings of the 2016 Power Systems Computation Conference (PSCC), Genoa, Italy, 20–24 June 2016. [Google Scholar]
- Manousakis, N.M.; Korres, G.N. Optimal PMU arrangement considering limited channel capacity and transformer tap settings. IET Gener. Transm. Distrib. 2020, 14, 5984–5991. [Google Scholar] [CrossRef]
- Qi, B.; Yuan, Y.; Yang, Y.; Bu, Q.; Chen, J. Chapter 1—Overview of Smart Substations; Yuan, Y., Yang, Y., Eds.; IEC 61850-Based Smart Substations; Academic Press: Cambridge, MA, USA, 2019; pp. 1–24. [Google Scholar]
- Li, J.; Huang, Q.; Li, P.; Huang, H.; Zhang, L. Chapter 8—Intelligent Status Monitoring System for Smart Substations; Yuan, Y., Yang, Y., Eds.; IEC 61850-Based Smart Substations; Academic Press: Cambridge, MA, USA, 2019; pp. 255–305. [Google Scholar]
- Bogani, C.; Gasparo, M.; Papini, A. Generalized pattern search methods for a class of nonsmooth optimization problems with structure. J. Comput. Appl. Math. 2009, 229, 283–293. [Google Scholar] [CrossRef]
- Hosseini, S.S.S.; Gandomi, A.H.; Nemati, A.; Hosseini, S.H.S. Reactive Power and Voltage Control Based on Mesh Adaptive Direct Search Algorithm. In Engineering and Applied Sciences Optimization; Springer: Berlin/Heidelberg, Germany, 2015; pp. 217–231. [Google Scholar]
- The MathWorks Inc. Optimization Toolbox for Use with MATLAB R®. User’s Guide for Mathwork. 2016. Available online: www.mathworks.com (accessed on 15 February 2024).
- Available online: https://coin-or.github.io/Ipopt/ (accessed on 15 February 2024).
- Bestuzheva, K.; Besançon, M.; Chen, W.K.; Chmiela, A.; Donkiewicz, T.; van Doornmalen, J.; Eifler, L.; Gaul, O.; Gamrath, G.; Gleixner, A.; et al. Enabling research through the SCIP optimization suite 8. 0. ACM Trans. Math. Softw. 2023, 49, 1–21. [Google Scholar] [CrossRef]
- Available online: https://yalmip.github.io/_posts/tutorials/2016-09-17-globaloptimization/ (accessed on 15 February 2024).
- Parametric Fusion (MOSEK 10.1). Available online: https://www.mosek.com (accessed on 15 February 2024).
- Löfberg, J. YALMIP: A toolbox for modeling optimization in MATLAB. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 2–4 September 2004; pp. 284–289. [Google Scholar]
- Zimmerman, R.D.; Murillo-Sánchez, C.E.; Thomas, R.J. MATPOWER: Steady-state operations, planning, and analysis tools for power systems research and education. IEEE Trans. Power Syst. 2010, 26, 12–19. [Google Scholar] [CrossRef]
- Available online: https://www.mathworks.com/help/optim/ug/mixed-integer-linear-programming-algorithms.html (accessed on 15 April 2024).
- Available online: https://www.mathworks.com/help/optim/ug/intlinprog.html (accessed on 15 April 2024).
- Available online: https://docs.mosek.com/latest/cxxfusion/mip-optimizer.html (accessed on 15 April 2024).
- Maratos, N.G. Exact Penalty Function Algorithms for Finite Dimensional and Optimization Problems. Ph.D. Thesis, Imperial College of Science and Technology, University of London, London, UK, 1978. [Google Scholar]
- Available online: https://icseg.iti.illinois.edu/power-cases/ (accessed on 15 February 2024).
- Available online: https://coin-or.github.io/Cbc/intro.html (accessed on 15 February 2024).
- Available online: https://www.gnu.org/software/glpk/ (accessed on 15 February 2024).
- Available online: https://www.gurobi.com/ (accessed on 15 April 2024).
- Available online: https://www.gurobi.com/documentation/current/refman/mipgapabs.html (accessed on 15 April 2024).
- Available online: https://www.gurobi.com/documentation/current/refman/mipgap2.html (accessed on 15 April 2024).



| L | nPMU | PMU Locations | PMU Channels |
|---|---|---|---|
| 4 | 4 | 2, 8, 10, 13 | {2-1, 2-3, 2-4, 2-5} {8-7} {10-9, 10-11} {13-6, 13-12, 13-14} |
| L | nPMU | PMU Locations | PMU Channels |
|---|---|---|---|
| 4 | 4 | 2, 6, 7, 9 | {2-1, 2-3, 2-4, 2-5} {6-5, 6-11, 6-12, 6-13} {7-4, 7-8, 7-9} {9-4, 9-7, 9-10, 9-14} |
| IEEE Power Systems | Branches | PMU Number | Solution Algorithm | |
|---|---|---|---|---|
| Primal Simplex | Dual Simplex | |||
| 14-bus | 20 | 7 | 1, 6, 10, 14, 17, 18, 19 | 2, 3, 9, 12, 14, 18, 20 |
| 30-bus | 41 | 15 | 2, 3, 8, 10, 13, 16, 20, 21, 23, 25, 29, 32, 34, 36, 39 | 1, 4, 8, 10, 13, 16, 20, 21, 23, 25, 29, 32, 34 36, 39 |
| 57-bus | 80 | 29 | 2, 4, 6, 8, 14, 17, 26, 29, 31, 33, 35, 38, 40, 43, 45, 47, 50, 52, 55, 59, 61, 63, 65, 68, 70, 71, 72, 74, 76 | 2, 4, 6, 7, 9, 13, 17, 26, 29, 31, 33, 36, 38, 40, 43, 45, 47, 49, 55, 57, 58, 60, 62, 64, 68, 70, 71, 73, 76 |
| 118-bus | 186 | 61 | 1, 4, 6, 9, 10, 18, 19, 22, 24, 27, 29, 32, 34, 37, 40, 46, 48, 55, 58, 60, 61, 64, 73, 76, 79, 81, 83, 91, 93, 95, 96, 103, 105, 111, 113, 114, 120, 122, 126, 129, 132, 134, 137, 140, 144, 147, 152, 157, 159, 162, 165, 170, 172, 173, 176, 177, 179, 182, 183, 184, 186 | 1, 4, 6, 9, 10, 17, 18, 22, 24, 27, 29, 32, 34 37, 40, 46, 48, 55, 58, 60, 61 64, 73, 78, 81, 83, 87, 90, 94, 96, 99, 101, 105, 111, 113, 114, 118, 122, 126, 129, 132, 134, 137, 140, 144, 147, 153, 157, 158, 162, 168, 172, 173, 174 176, 177, 179, 182, 183, 184, 185 |
| L | NPMU | Primal-Simplex | Dual-Simplex | ||
|---|---|---|---|---|---|
| PMU Locations | PMU Channels | PMU Locations | PMU Channels | ||
| 1 | 7 | 2, 4, 5, 6, 8, 10, 13 | {2-1} {4-9} {5-1} {6-12} {8-7} {10-11} {13-14} | 2, 4, 6, 8, 9, 10, 13 | {2-1} {4-3} {6-5} {8-7} {9-14} {10-11} {13-12} |
| 2 | 5 | 2, 5, 7, 10, 13 | {2-3, 2-5} {5-1, 5-6} {7-4, 7-8} {10-9, 10-11} {13-12, 13-14} | 2, 3, 7, 11, 13 | {2-1, 2-5} {3-2, 3-4} {7-8, 7-9} {11-6, 11-10} {13-12, 13-14} |
| 3 | 4 | 2, 6, 8, 9 | {2-1, 2-3, 2-5} {6-11, 6-12, 6-13} {8-7} {9-4, 9-10, 9-14} | 2, 7, 10, 13 | {2-1, 2-3, 2-5} {7-4, 7-8, 7-9} {10-9, 10-11} {13-6, 13-12, 13-14} |
| 4 | 4 | 2, 7, 11, 13 | {2-1, 2-3, 2-4, 2-5} {7-4, 7-8, 7-9} {11-6, 11-10} {13-6, 13-12, 13-14} | 2, 8, 10, 13 | {2-1, 2-3, 2-4, 2-5} {8-7} {10-9, 10-11} {13-6, 13-12, 13-14} |
| 5 | 4 | 2, 7, 11, 13 | {2-1, 2-3, 2-4, 2-5} {7-4, 7-8, 7-9} {11-6, 11-10} {13-6, 13-12, 13-14} | 2, 8, 10, 13 | {2-1, 2-3, 2-4, 2-5} {8-7} {10-9, 10-11} 13-6, 13-12, 13-14} |
| L | NPMU | Primal-Simplex | Dual-Simplex | ||
|---|---|---|---|---|---|
| PMU Locations | PMU Channels | PMU Locations | PMU Channels | ||
| 1 | 7 | 2, 5, 6, 7, 9, 10, 13 | {2-3} {5-1} {6-12} {7-8} {9-4} {10-11} {13-14} | 2, 4, 6, 7, 9, 10, 13 | {2-1} {4-3} {6-5} {7-8} {9-4} {10-11} {13-12} |
| 2 | 5 | 2, 6, 7, 10, 13 | {2-1, 2-3} {6-5, 6-13} {7-4, 7-8} {10-9, 10-11} {13-6, 13-12} | 2, 4, 7, 11, 13 | {2-1, 2-5} {4-2, 4-3} {7-8, 7-9} {11-6, 11-10} {13-12, 13-14} |
| 3 | 4 | 2, 6, 7, 9 | {2-1, 2-3, 2-5} {6-11, 6-12, 6-13} {7-4, 7-8, 7-9} {9-4, 9-10, 9-14} | 2, 6, 7, 9 | {2-1, 2-3, 2-5} {6-11, 6-12, 6-13} {7-4, 7-8, 7-9} {9-7, 9-10, 9-14} |
| 4 | 4 | 2, 6, 7, 9 | {2-1, 2-3, 2-4, 2-5} {6-5, 6-11, 6-12, 6-13} {7-4, 7-8, 7-9} {9-4, 9-7, 9-10, 9-14} | 2, 6, 7, 9 | {2-1, 2-3, 2-4, 2-5} {6-5, 6-11, 6-12, 6-13} {7-4, 7-8, 7-9} {9-4, 9-7, 9-10, 9-14} |
| 5 | 4 | 2, 6, 7, 9 | {2-1, 2-3, 2-4, 2-5} {6-5, 6-11, 6-12, 6-13} {7-4, 7-8, 7-9} {9-4, 9-7, 9-10, 9-14} | 2, 6, 7, 9 | {2-1, 2-3, 2-4, 2-5} {6-5, 6-11, 6-12, 6-13} {7-4, 7-8, 7-9} {9-4, 9-7, 9-10, 9-14} |
| * Starting YALMIP global branch & bound. |
| * Upper solver : fmincon |
| * Lower solver : SCIP |
| * LP solver : SCIP |
| * -Extracting bounds from model |
| * -Performing root-node bound propagation |
| * -Calling upper solver (no solution found) |
| * -Branch-variables : 18 |
| * -More root-node bound-propagation |
| * -Performing LP-based bound-propagation |
| * -And some more root-node bound-propagation |
| * Starting the b&b process |
| Node Upper Gap (%) Lower Open Time |
| 1 : 4.00000E+00 0.00 4.00000E+00 2 5s Solution found by heuristics |
| 2 : 4.00000E+00 0.00 4.00000E+00 0 6s Poor lower bound | Pruned stack based on new upper bound |
| * Finished. Cost: 4 (lower bound: 4, relative gap 0%) |
| * Termination with all nodes pruned |
| * Timing: 14% spent in upper solver (2 problems solved) |
| * 11% spent in lower solver (2 problems solved) |
| * 8% spent in LP-based domain reduction (36 problems solved) |
| * 1% spent in upper heuristics (1 candidates tried) |
| Columns 1 through 15 |
| 0 1 0 0 0 0 0 0 0 1 0 1 1 0 0 |
| Columns 16 through 18 |
| 0 0 0 |
| 2 10 12 13 |
| Linear scalar (real, 18 variables) |
| Current value: 4 |
| Coefficients range: 1 to 1 |
| Optimal PMU numbers: 4 |
| L | nPMU | PMU Locations | PMU Channels |
|---|---|---|---|
| 4 | 4 | 2, 6, 8, 9 | {2-1, 2-3, 2-4, 2-5} {6-5, 6-11, 6-12, 6-13} {8-7} {9-4, 9-7, 9-10, 9-14} |
| +++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ |
| * Starting YALMIP global branch & bound. |
| * Upper solver : fmincon |
| * Lower solver : SCIP |
| * LP solver : SCIP |
| * -Extracting bounds from model |
| * -performing root-node bound propagation |
| * -Calling upper solver (no solution found) |
| * -Branch-variables : 18 |
| * -More root-node bound-propagation |
| * -Performing LP-based bound-propagation |
| * -And some more root-node bound-propagation |
| * Starting the b&b process |
| Node Upper Gap (%) Lower Open Time |
| 1 : 2.64286E+00 0.00 2.64286E+00 2 11s Solution found by heuristics |
| 2 : 2.64286E+00 0.00 2.64286E+00 0 12s Poor lower bound | Pruned stack based on new upper bound |
| * Finished. Cost: 2.6429 (lower bound: 2.6429, relative gap 0%) |
| * Termination with all nodes pruned |
| * Timing: 19% spent in upper solver (2 problems solved) |
| * 3% spent in lower solver (2 problems solved) |
| * 8% spent in LP-based domain reduction (36 problems solved) |
| * 1% spent in upper heuristics (1 candidates tried) |
| Columns 1 through 15 |
| 0 1 0 0 0 0 0 0 0 1 1 0 1 0 0 |
| Columns 16 through 18 |
| 0 0 0 |
| 2 10 11 13 |
| Linear scalar (real, 18 variables) |
| Current value: 2.6429 |
| Coefficients range: 0.64286 to 0.85714 |
| Optimal PMU numbers: 4 |
| best function value: 2.642857e+00 |
| L | nPMU | PMU Locations | PMU Channels |
|---|---|---|---|
| 4 | 4 | 2, 6, 7, 9 | {2-1, 2-3, 2-4, 2-5} {6-5, 6-11, 6-12, 6-13} {7-4, 7-8, 7-9} {9-4, 9-7, 9-10, 9-14} |
| L | NPMU | SCIP Optimizes the Single Objective Function | SCIP Optimizes the b-Objective Function | ||
|---|---|---|---|---|---|
| PMU Locations | PMU Channels | PMU Locations | PMU Channels | ||
| 1 | 7 | 2, 4, 6, 8, 9, 10, 13 | {2-1} {4-3} {6-5} {8-7} {9-14} {10-11} {13-12} | 2, 4, 5, 6, 8, 9, 10 | {2-1} {4-3} {5-6} {6-12} {8-7} {9-14} {10-11} |
| 2 | 5 | 2, 4, 7, 11, 13 | {2-1, 2-3} {4-2, 4-5} {7-8, 7-9} {11-6, 11-10} {13-12, 13-14} | 2, 5, 7, 11, 13 | {2-3, 2-4} {5-1, 5-4} {7-8, 7-9} {11-6, 11-10} {13-12, 13-14} |
| 3 | 4 | 2, 6, 8, 9 | {2-1, 2-3, 2-5} {6-11, 6-12, 6-13} {8-7} {9-4, 9-10, 9-14} | 2, 6, 7, 9 | {2-1, 2-3, 2-5} {6-11, 6-12, 6-13} {7-4, 7-8, 7-9} {9-7, 9-10, 9-14} |
| 4 | 4 | 2, 7, 10, 13 | {2-1, 2-3, 2-4, 2-5} {7-4, 7-8, 7-9} {10-9, 10-11} {13-6, 13-12, 13-14} | 2, 6, 7, 9 | {2-1, 2-3, 2-4, 2-5} {6-5, 6-11, 6-12, 6-13} {7-4, 7-8, 7-9} {9-4, 9-7, 9-10, 9-14} |
| 5 | 4 | 2, 6, 8, 9 | {2-1, 2-3, 2-4, 2-5} {6-5, 6-11, 6-12, 6-13} {8-7} {9-4, 9-7, 9-10, 9-14} | 2, 6, 7, 9 | {2-1, 2-3, 2-4, 2-5} {6-5, 6-11, 6-12, 6-13} {7-4, 7-8, 7-9} {9-4, 9-7, 9-10, 9-14} |
| Max | |||||
|---|---|---|---|---|---|
| Iter | f-Count | f(x) | Constraint | MeshSize | Method |
| 0 | 1 | 11 | 1 | 0.25 | |
| 1 | 184 | 5 | 0 | 0.009772 | Update multipliers |
| 2 | 473 | 4.71875 | 0.09375 | 0.001 | Increase penalty |
| 3 | 1197 | 3.99805 | 0.001953 | 9.333e-07 | Update multipliers |
| 4 | 2094 | 3.99934 | 0.0003319 | 8.71e-10 | Update multipliers |
| 5 | 3378 | 4 | 4.545e-07 | 8.128e-13 | Update multipliers |
| 6 | 4887 | 4 | 0 | 7.586e-16 | Update multipliers |
| Norm of First-Order | ||||||
|---|---|---|---|---|---|---|
| Iter | F-Count | f(x) | Feasibility | Steplength | Step | Optimality |
| 0 | 19 | 1.000000e+01 | 1.000e+00 | 2.000e+00 | ||
| 1 | 38 | 1.500000e+00 | 1.000e+00 | 1.000e+00 | 3.082e+00 | 1.000e+00 |
| 2 | 58 | 2.952500e+00 | 3.000e-01 | 7.000e-01 | 1.050e+00 | 1.021e+00 |
| 3 | 77 | 4.250000e+00 | 0.000e+00 | 1.000e+00 | 4.500e-01 | 1.066e+00 |
| 4 | 96 | 4.080921e+00 | 0.000e+00 | 1.000e+00 | 2.160e-01 | 9.631e-01 |
| 5 | 115 | 4.000027e+00 | 0.000e+00 | 1.000e+00 | 2.845e-01 | 5.909e-01 |
| 6 | 134 | 4.000001e+00 | 0.000e+00 | 1.000e+00 | 5.261e-03 | 2.367e-03 |
| 7 | 153 | 4.000000e+00 | 0.000e+00 | 1.000e+00 | 1.112e-03 | 1.108e-03 |
| 8 | 172 | 4.000000e+00 | 0.000e+00 | 1.000e+00 | 1.691e-05 | 9.899e-06 |
| 9 | 191 | 4.000000e+00 | 0.000e+00 | 1.000e+00 | 1.024e-33 | 0.000e+0 |
| Iter Objective inf_pr inf_du lg(mu) ||d|| lg(rg) alpha_du alpha_pr ls |
|---|
| 0 9.0000000e+00 0.00e+00 2.00e+00 0.0 0.00e+00 - 0.00e+00 0.00e+00 0 |
| 1 2.0000000e+00 1.00e+00 1.00e+00 -11.0 2.00e+00 - 1.00e+00 5.00e-01f 2 |
| 2 2.9090909e+00 2.84e-01 5.08e-01 -11.0 5.45e-01 - 1.00e+00 1.00e+00h 1 |
| 3 4.1838231e+00 7.36e-02 6.46e-01 -11.0 3.05e-01 - 1.00e+00 1.00e+00h 1 |
| 4 5.0510211e+00 1.75e-02 7.35e-01 -11.0 1.85e-01 - 1.00e+00 1.00e+00h 1 |
| 5 5.5122440e+00 3.35e-03 1.20e+00 -11.0 1.08e-01 - 1.00e+00 1.00e+00h 1 |
| 6 5.5457963e+00 2.60e-03 2.09e+00 -11.0 5.85e-02 - 1.00e+00 1.00e+00h 1 |
| 7 5.2306455e+00 1.61e-03 1.51e+00 -11.0 6.58e-02 - 1.00e+00 1.00e+00f 1 |
| 8 4.3870988e+00 8.62e-03 1.08e+00 -11.0 3.93e-01 - 1.00e+00 1.00e+00f 1 |
| 9 3.9647785e+00 1.07e-02 6.53e-01 -11.0 3.64e-01 - 1.00e+00 1.00e+00f 1 |
| 10 4.0022318e+00 2.36e-04 5.75e-02 -11.0 2.86e-02 - 1.00e+00 1.00e+00h 1 |
| 11 4.0013014e+00 8.39e-07 5.23e-02 -11.0 2.46e-03 - 1.00e+00 1.00e+00h 1 |
| 12 4.0417359e+00 2.28e-07 4.36e+00 -11.0 1.19e-01 - 1.00e+00 1.00e+00h 1 |
| 13 4.0012661e+00 3.64e-08 2.84e-01 -11.0 1.16e-01 - 1.00e+00 1.00e+00f 1 |
| 14 4.0012370e+00 4.73e-12 9.64e-02 -11.0 1.64e-03 - 1.00e+00 1.00e+00h 1 |
| 15 4.0010381e+00 1.49e-12 1.12e+00 -11.0 5.34e-03 - 1.00e+00 1.00e+00f 1 |
| 16 4.0005805e+00 1.50e-11 1.21e+00 -11.0 1.25e-02 - 1.00e+00 1.00e+00f 1 |
| 17 4.0002220e+00 1.19e-11 7.46e-01 -11.0 1.44e-02 - 1.00e+00 1.00e+00f 1 |
| 18 4.0000000e+00 4.46e-12 3.65e+00 -11.0 1.17e-02 - 1.00e+00 1.00e+00f 1 |
| 19 4.0000000e+00 2.22e-16 6.79e-04 -11.0 3.78e-06 - 1.00e+00 1.00e+00H 1 |
| 20 4.0000000e+00 3.00e-15 4.60e-09 -11.0 6.91e-11 - 1.00e+00 1.00e+00h 1 |
| 21 4.0000000e+00 0.00e+00 7.88e-11 -11.0 4.64e-13 - 1.00e+00 1.00e+00h 1 |
| Obtained results using generalized pattern search algorithm | |||
| L | nPMU | PMU locations | PMU channels |
| 4 | 4 | 2, 6, 8, 9 | {2-1, 2-3, 2-4, 2-5} {6-5, 6-11, 6-12, 6-13} {8-7} {9-4, 9-7, 9-10, 9-14} |
| Obtained results by using Sequential Quadratic Programming | |||
| 4 | 4 | 2, 7, 10, 13 | {2-1, 2-3, 2-4, 2-5 7-4, 7-8, 7-9 10-9, 10-11 13-6, 13-12, 13-14} |
| Obtained results by using Interior-Point Methods | |||
| 4 | 4 | 2, 8, 10, 13 | {2-1, 2-3, 2-4, 2-5} {8-7} {10-9, 10-11} {13-6, 13-12, 13-14} |
| Obtained results by using Genetic Algorithms | |||
| 4 | 4 | 2, 6, 8, 9 | {2-1, 2-3, 2-4, 2-5 6-5, 6-11, 6-12, 6-13 8-7 9-4, 9-7, 9-10, 9-14} |
| Obtained results by using Binary Swarm Optimization | |||
| 4 | 4 | 2, 7, 11, 13 | {2-1, 2-3, 2-4, 2-5 7-4, 7-8, 7-9 11-6, 11-10 13-6, 13-12, 13-14} |
| IEEE-Power Systems | Channel of PMUs | PMUs Number | Objective with One Product Redundancy Term | b-Objective Redundancy Term |
|---|---|---|---|---|
| IEEE-14 bus | 1 | 7 | 14 | 14 |
| 2 | 5 | 15 | 15 | |
| 3 | 4 | 14 | 16 | |
| 4 | 4 | 16 | 19 | |
| 5 | 4 | 16 | 19 | |
| IEEE-30 bus | 1 | 15 | 30 | 30 |
| 2 | 11 | 32 | 33 | |
| 3 | 10 | 33 | 39 | |
| 4 | 10 | 38 | 46 | |
| 5 | 10 | 40 | 49 | |
| 6 | 10 | 40 | 51 | |
| 7 | 10 | 37 | 52 | |
| IEEE-57 bus | 1 | 29 | 58 | 58 |
| 2 | 19 | 57 | 57 | |
| 3 | 17 | 61 | 62 | |
| 4 | 17 | 64 | 68 | |
| 5 | 17 | 69 | 71 | |
| 6 | 17 | 64 | 72 | |
| 7 | 17 | 64 | 72 | |
| IEEE-118 bus | 1 | 61 | 122 | 122 |
| 2 | 41 | 123 | 123 | |
| 3 | 33 | 121 | 123 | |
| 4 | 32 | 134 | 140 | |
| 5 | 32 | 148 | 153 | |
| 6 | 32 | 155 | 159 | |
| 7 | 32 | 158 | 162 | |
| 8 | 32 | 161 | 163 | |
| 9 | 32 | 162 | 164 |
| L | nPMU | PMU Locations | PMU Channels |
|---|---|---|---|
| 3 | 17 | 1, 6, 9, 15, 19, 22, 25, 27, 32, 36, 41, 44, 47, 50, 52, 54, 57 | {1-2, 1-16, 1-17 6-4, 6-5, 6-7 9-8, 9-10, 9-12 15-3, 15-13, 15-14 19-18, 19-20 22-21, 22-23, 22-38 25-24, 25-30 27-26, 27-28 32-31, 32-33, 32-34 36-35, 36-37, 36-40 41-11, 41-42, 41-43 44-39, 44-45 47-46, 47-48 50-49, 50-51 52-29, 52-53 54-9, 54-55 57-39, 57-56} |
| L | nPMU | PMU Locations | PMU Channels |
|---|---|---|---|
| 3 | 17 | 1, 6, 10, 15, 19, 22, 26, 29, 30, 32, 36 38, 41, 46, 49, 54, 57 | {1-2, 1-16, 1-17 6-4, 6-5, 6-8 10-9, 10-12, 10-51 15-3, 15-13, 15-45 19-18, 19-20 22-21, 22-23, 22-38 26-24, 26-27 29-7, 29-28, 29-52 30-25, 30-31 32-31, 32-33, 32-34 36-35, 36-37, 36-40 38-37, 38-44, 38-45 41-11, 41-42, 41-43 46-14, 46-47 49-13, 49-38, 49-50 54-53, 54-55 57-39, 57-56} |
| Interior-Point Methods | |||
|---|---|---|---|
| L | nPMU | PMU Locations | PMU Channels |
| 4 | 17 | 1, 4, 6, 9, 15, 20, 24, 28, 31, 32, 36, 38, 41, 47, 51, 53, 57 | {1-2, 1-15, 1-16, 1-17 4-3, 4-5, 4-6, 4-18 6-4, 6-5, 6-7, 6-8 9-8, 9-12, 9-13, 9-55 15-1, 15-3, 15-14, 15-45 20-19, 20-21 24-23, 24-25, 24-26 28-27, 28-29 31-30, 31-32 32-31, 32-33, 32-34 36-35, 36-37, 36-40 38-22, 38-44, 38-48, 38-49 41-11, 41-42, 41-43, 41-56 47-46, 47-48 51-10, 51-50 53-52, 53-57 57-39, 57-56} |
| Genetic Algoritjms | |||
|---|---|---|---|
| L | nPMU | PMU Locations | PMU Channels |
| 4 | 17 | 1, 5, 9, 15, 19, 22, 26, 29, 30, 32, 36, 38, 39, 41, 46, 51, 54 | {1-2, 1-15, 1-17 5-4, 5-6 9-8, 9-10, 9-12, 9-13 15-1, 15-3, 15-13, 15-45 19-18, 19-20 22-21, 22-23, 22-38 26-24, 26-27 29-27, 29-28, 29-52 30-25, 30-31 32-31, 32-33, 32-34 36-35, 36-37, 36-40 38-22, 38-44, 38-48. 38-49 39-37, 39-57 41-11, 41-42, 41-43, 41-56 46-14, 46-47 51-10, 51-50 54-53, 54-55} |
| Binary Swarm Optimization | |||
|---|---|---|---|
| L | nPMU | PMU Locations | PMU Channels |
| 4 | 17 | 1, 4, 6, 9, 15, 20, 24, 28, 31, 32, 36, 38, 41, 47, 51, 53, 57 | {1-2, 1-15, 1-16, 1-17 4-3, 4-5, 4-6, 4-18 6-4, 6-5, 6-7, 6-8 9-11, 9-12, 9-13, 9-55 15-1, 15-3, 15-14, 15-45 20-19, 20-21 24-23, 24-25, 24-26 28-27, 28-29 31-30, 31-32 32-31, 32-33, 32-34 36-35, 36-37, 36-40 38-22, 38-44, 38-48, 38-49 41-11, 41-42, 41-43, 41-56 47-46, 47-48 51-10, 51-50 53-52, 53-57 57-39, 57-56} |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Theodorakatos, N.P.; Babu, R.; Theodoridis, C.A.; Moschoudis, A.P. Mathematical Models for the Single-Channel and Multi-Channel PMU Allocation Problem and Their Solution Algorithms. Algorithms 2024, 17, 191. https://doi.org/10.3390/a17050191
Theodorakatos NP, Babu R, Theodoridis CA, Moschoudis AP. Mathematical Models for the Single-Channel and Multi-Channel PMU Allocation Problem and Their Solution Algorithms. Algorithms. 2024; 17(5):191. https://doi.org/10.3390/a17050191
Chicago/Turabian StyleTheodorakatos, Nikolaos P., Rohit Babu, Christos A. Theodoridis, and Angelos P. Moschoudis. 2024. "Mathematical Models for the Single-Channel and Multi-Channel PMU Allocation Problem and Their Solution Algorithms" Algorithms 17, no. 5: 191. https://doi.org/10.3390/a17050191
APA StyleTheodorakatos, N. P., Babu, R., Theodoridis, C. A., & Moschoudis, A. P. (2024). Mathematical Models for the Single-Channel and Multi-Channel PMU Allocation Problem and Their Solution Algorithms. Algorithms, 17(5), 191. https://doi.org/10.3390/a17050191