1. Introduction
In the transport industry, planning and scheduling are of utmost importance to minimise expenses and provide a consistent quality of service. To adequately model real-world transportation and service delivery, a number of Vehicle Routing Problem (VRP) variants have been formulated. The underlying mathematical representation of such problems in operational research is dated from 1959 when it was defined in [
1] as the “Truck Dispatching Problem”. This model includes a fleet of vehicles that need to travel in order to provide means of transportation or perform services at remote locations. VRP problems are a class of NP-hard discrete combinatorial optimisation problems and hence unlikely to be solvable in polynomial time [
2].
In this paper, we focus on dynamic VRP scenarios [
3,
4], which include consideration of two important aspects in real-life applications: the availability and reliability of information. In most problem instances considered, all input is known beforehand, which corresponds to information availability. Furthermore, the information is considered static, and it is presumed that vehicle routes do not change while in execution.
In contrast to this, one can approach the problem with most of the input available, while also allowing that part of the information is revealed dynamically during execution (evolution of input data). This is considered to be a dynamic VRP, and may include additional information or changes in current requirements. Common sources of dynamic change are arrivals of new customer requests, changes in travel time due to current traffic conditions, as well as vehicle availability, such as the possible breakdown of vehicles.
Furthermore, regardless of the moment in time in which the information becomes available, during the execution actual values of VRP variables may also be subject to change. For instance, the expected travel time may be prolonged, or the customer request constraints may be altered due to unforeseen events. In this case, the problem is also considered to be stochastic, and final input and output values are only known after the schedule is executed. While we do not use stochastic modelling in this paper, we propose an approach that can also be used under stochastic conditions.
Dynamic conditions may also impose different criteria for schedule optimisation, such as the number of serviced requests in time (throughput), minimisation of response time or tardiness of service. Existing heuristics are not designed to optimise arbitrary criteria which could be defined by the user; it would be necessary to design a new heuristic to handle such a case. Therefore, selecting an appropriate algorithm and applying it in dynamic conditions is generally not straightforward.
Instead of manually selecting (or even guessing) which heuristic would be suitable in dynamic conditions, we propose to evolve (i.e., automatically generate) an appropriate heuristic, in the form of a dispatching rule, with the use of genetic programming [
5]. This kind of approach is identified as a hyper-heuristic [
6,
7,
8] since GP is searching the space of possible algorithms, rather than the space of possible routes. Genetic programming can evolve any form of an algorithm, provided a given definition of its building elements and a measure of algorithm quality (the fitness function). With this approach, we may create heuristics tailored to the problem at hand, regardless of the given performance objective and specific constraints [
9,
10,
11].
The hyper-heuristic approach presented in this paper aims at providing the following:
applicability in dynamic and stochastic VRP environments;
an approach of generating dispatching rules to optimise routes for arbitrary user-defined criteria;
possibility to generate solutions of acceptable quality for very large instances of VRP;
the means of producing an initial solution that may be used for a subsequent decomposition approach.
To be able to achieve this, we identify and propose the following main contributions:
definition of schedule generation algorithms and a learning environment for automatic development of VRP heuristics;
definition of functional and terminal elements for two VRP variants: capacitated VRP (CVRP) and VRP with time windows (VRPTW);
automated development of dispatching rules for static and dynamic instances of CVRP and VRPTW;
automated optimisation of arbitrary criteria, such as soft constrained time windows and minimisation of vehicle time travel deviation.
It must be noted that the aim of this approach is not the generation of optimal or near-optimal solutions. If one is able to devote an arbitrary amount of time for creating the schedule, more efficient solutions can always be obtained by using improvement heuristics. However, if changes occur during the actual execution of the system (i.e., while vehicles are on route), one may not have enough time available to rebuild the rest of the schedule taking new information into account. Furthermore, most improvement heuristics are not easily accommodated to the fact that a partial schedule is already underway, and only the unfinished part must be optimised (constructive heuristics are readily applicable in this case).
On the other hand, using the hyper-heuristic approach, one is able to find simple heuristics that operate very fast and are suitable in both dynamic and stochastic conditions. Furthermore, by setting an appropriate performance measure, the user can generate customised heuristics that perform well given specific constraints or requirements.
The rest of the paper is organised as follows; in the following section the motivation and related work are briefly discussed.
Section 3 describes the proposed approach and is central to the paper.
Section 5 and
Section 6 show the application of the hyper-heuristic to CVRP and VRPTW variants, respectively.
Section 7 offers a discussion about the scalability and parameter sensitivity, as well as outlining some avenues for future research. Finally,
Section 8 concludes the paper.
2. Motivation and Related Work
Since contemporary VRP problem instances include hundreds or thousands of requests, they are usually not amenable to be solved with exact methods. Instead, heuristic methods or fuzzy systems [
12,
13] are commonly used to provide a good enough solution which satisfies user-defined criteria. Heuristic methods may be further divided into two categories: the first group consists of search-based algorithms which search the space of solutions (routes) to find the best one. The second group are problem-specific constructive heuristics that build the solution using some features of the problem.
Search-based methods (such as evolutionary algorithms, ant colony optimisation, particle swarm optimisation, etc.) can be used to solve the VRP. Although the solutions obtained are often of a good quality, these methods require a substantial computational time to reach solutions of acceptable quality (since they search the entire solution space). Additionally, in dynamic conditions the search based methods usually have to be adapted in some way. In this case the search space considers only the pending requests, but the current condition of the system (e.g., vehicles currently on the way) must be taken into account by adding explicit or implicit constraints into the algorithm.
Constructive heuristics, on the other hand, directly build the solution and can therefore quickly react to changes in the environment, making them usable in dynamic conditions, since their computational complexity is almost negligible. However, it is often hard to select the most appropriate heuristic for the given VRP variant, objective criteria and problem instance, which is also evident in other problems, such as in scheduling [
8,
14].
A significant effort has been devoted to devising efficient solvers for the static variant of the vehicle routing problem. Various algorithms, mostly based on metaheuristics, have been used as optimisation techniques in the VRP domain [
15]. Several survey papers outline in more detail the research conducted in the area of VRPs [
16,
17,
18,
19].
In [
20] a tabu search optimisation is used to tackle the VRP problem with soft time windows, which means that lateness at a customer location is allowed but it incurs a certain penalty. The authors introduced a new neighbourhood structure, which has allowed the algorithm to achieve some of the best-known results on specific benchmark problems. A simulated-annealing-like-based local search was proposed in [
21], which was applied to the VRP with time windows. The proposed method combined tabu search with simulated annealing and obtained results suggest that the method is comparable to other metaheuristic methods. Models describing different evolutionary methods for VRP were presented in [
22,
23]. The latter also introduced a two phase approach, in which a problem specific heuristic generates an initial solution in the first phase, which is then improved via local search in the second phase. The method was tested on several large scale problems and achieved a good performance on most of the problem instances. Ant-colony optimisation was used in [
24], where the proposed approach is based on a parallel local search algorithm, once the solution space is decomposed into small enough instances. A decomposition technique which reduces the number of vehicles and can also be executed in parallel was described in several applications [
25,
26]. This approach requires a suitable initial solution to be constructed beforehand, and that part is mostly performed by a constructive heuristic method. Many of these solving procedures rely on a reasonably good initial solution, which is then improved with metaheuristics [
27,
28], local search algorithms [
29], decomposition techniques and combinations of those. The incremental improvement approach is in most applications used only in static scheduling conditions, since the improvement algorithm usually operates on a fixed problem instance while it searches for a better solution. In this context, genetic programming was applied in [
30] as a method for generation of new heuristic functions that can be used for constructing initial solutions for VRP with time windows, which were then improved with a decomposition approach. A hyper-heuristic method which selects existing heuristics for creating and improving a solution is proposed in [
31]. The hyper-heuristic method is based on the iterative local search algorithm which determines the actions that need to be performed on the initial solution in order to improve it. The proposed method was compared to several approaches and the results show that it achieved better overall performance.
In dynamic conditions, on the other hand, the static approaches cannot usually be used without some adaptation. Since part of the customer information becomes available during the system execution, the problem instance can only be completely described at the end of the planning horizon. Therefore, no method can provide the optimal solution before the schedule is completed; instead, “optimal” choices can only be given for the current state of the system. Because of the previous, dynamic solvers usually rely on heuristic approaches that are able to quickly obtain a solution to the current state of the problem.
It is possible to adapt the improvement metaheuristic methods for use in dynamic conditions; in [
32] the authors employ a parallel tabu search with many variants of possible routes. The existing routes are compared to new customer requests and a decision is made whether the request should be accepted or rejected. The authors experimented with dynamic VRP with and without time dependent travel times [
33], and a similar approach was applied in [
34]. A smaller number of applications also considered the stochastic variant of the VRPTW [
35], in which new customer requests arrive over time. In order to tackle this problem the authors use probabilistic knowledge of the future and define a strategy which introduces dummy customers to better cover the entire territory.
Genetic algorithms (GA) were extensively used to solve static VRP instances, but have also been applied for the dynamic VRP [
36] and pick up and delivery (PDP) problems [
37]. In these applications, the GA is modified for use in dynamic conditions in the way that it is in fact constantly running concurrently with the execution of the system. The solutions produced by the GA are thus adapting on-the-fly to new information when it becomes available. Another metaheuristic, Ant Colony System (ACS), has also been used to solve the dynamic VRP in [
38]. In this application, the scheduling horizon is a priori divided into time slices of equal duration, and a separate ACS is run for each time slice. Only the information related to the current time slice is taken into account, under the assumption that the requests can be postponed. Similar modifications by using ACS are used in [
39]. In [
40], an ACS is also applied for solving dynamic VRP with time windows, in a similar manner as in the previous two papers. The proposed ACO algorithm uses a joint solution construction mechanism, which constructs in parallel routes of the vehicles. The approach is combined with a local search procedure in order to improve its performance. The authors test the approach on problems with variable dynamics, which means that they vary the amount of orders that are known at the beginning of the system and those that are released over time. In [
41] the dynamic VRP problem was tackled by using an evolutionary hyper-heuristic method which uses three different types of simple heuristic procedures for constructing and improving the schedule, and the order in which these heuristics are used and their parameters are optimised by using an evolutionary algorithm. The dynamic VRP with time windows and stochastic customers was considered in [
42]. In order to tackle the dynamic problem, the authors propose a new decision rule, called GSA, which at each step chooses the next action to perform. The results demonstrate that the proposed method produces results comparable to the state of the art and that it leads to better decisions in a stochastic context. Genetic programming has also demonstrated its potential when applied to the dynamic pickup and delivery problem in [
43]. The paper compared several genetic programming settings and problems with varying levels of dynamism, urgency and scale. The results show that the evolved heuristic obtained a competitive performance when compared to traditional approaches.
In all of these examples, the practitioner is bound by the time available to reach a decision for the next state of the system. While the current solution can always be improved given enough time, changes can occur in each moment after a single solution has been chosen, and the reaction time may be crucial in some applications. In the next section, we present the hyper-heuristic approach that aims to provide a solution in a negligible amount of time, taking into account current conditions and user-defined criteria. After the solution is obtained, it can also be modified using improvement heuristics if additional time is available.
3. Hyper-Heuristic Approach for VRP
3.1. Capacitated Vehicle Touting Problem
The capacitated VRP (CVRP) is described as follows: a set of n customers must be serviced from a central depot using vehicles of equal given capacity, denoted with Q. Each customer must be served by exactly one vehicle. A customer is defined with the following parameters:
demand ;
geographical data.
The scheduling task includes constructing a (minimal) number of routes, specifying the order in which vehicles are servicing disjunct sets of customers. The goal is usually to minimise the number of vehicles and the total distance, while the total demand for each route may not exceed the capacity of the vehicle which serves that route. In other words, for each route r the following condition must hold: , where m is the number of customers on route r.
3.2. Vehicle Routing Problem with Time Windows
The vehicle routing problem with time windows (VRPTW) is an extension of the VRP, defined in [
44]. The VRPTW includes an additional constraint, which is that every customer
must be serviced within a given time window
. If a vehicle arrives earlier it must wait for the window opening time; if the vehicle arrives after the end of the time window, the solution is not valid. Every customer has the following parameters defined:
ready time —window opening time;
due date —window closing time;
service time —time needed for the customer to be serviced;
demand —customer capacity;
geographical data.
Waiting time may be induced at customer v if the vehicle arrives at the customer before its window opening time. In both of these variants, usually two objective criteria are used: the primary is to minimize the number of vehicles and the secondary to reduce the total travel distance.
3.3. Generating Heuristics for VRP
The scheduling method applied in this work is priority scheduling, in which certain elements of the system are assigned priority values. In the classic scheduling theory, the typical elements are jobs (activities) and machines (resources), but the same logic can be applied to VRP scheduling with customers and vehicles. The choice of the next customer for a particular vehicle is based on the customer’s priority value, which may be determined dynamically. This type of scheduling algorithm is also called, variously, ‘dispatching rule’, ‘scheduling rule’ or just ‘heuristic’.
The term dispatching rule (DR), in a narrow sense, often represents only the priority function that assigns values to system elements [
45]. For instance, in classic scheduling a scheduling process may be described with the statement ‘scheduling is performed using the shortest processing time (SPT) rule’, in which case jobs are sequenced in increasing order of their processing times. In VRP, a very simple heuristic may be the one that, for every vehicle, chooses the current closest customer as the next one. In terms of priority scheduling, we can say that the priority function applied to each customer is equal to that customer’s current distance.
While the method of assigning vehicles to customers based on priority values may be trivial, in some environments it is not necessarily so. This is particularly true in dynamic conditions, where orders may arrive over time or may not be serviced before some condition is met. Even when the priority function is defined, an additional procedure must be defined dictating how customers are serviced based on their priorities and possible system constraints.
In accordance to existing scheduling nomenclature, we name this component a meta-algorithm [
9,
10,
46], or alternatively a schedule generation scheme (SGS) [
47,
48], which is a term commonly used in production scheduling. A meta-algorithm encapsulates the priority function, but the same meta-algorithm may be used with different priority functions and vice versa. In this work, the meta-algorithm is defined manually; the priority function, on the other hand, is evolved automatically with genetic programming and represented using appropriate functions and variables. This way, using the same meta-algorithm, different scheduling heuristics best suited for various criteria can be devised.
We propose two meta-algorithms, which differ by the way they construct the entire schedule, and consequently by the conditions they can be used in. The first meta-algorithm is a serial one, which builds the schedule incrementally by constructing routes one vehicle at a time. This approach is most commonly used in existing VRPs and is depicted in Algorithm 1.
| Algorithm 1 Serial VRP meta-algorithm |
- 1:
while customers there are customers to serve do - 2:
start new route; - 3:
while unvisited valid customers do - 4:
nextCustomer ← customer with the best value of the priority function; - 5:
add nextCustomer to current route; - 6:
end while - 7:
end route by returning the vehicle to the depot; - 8:
end while
|
We emphasise that the same meta-algorithm may be used for any VRP flavor; at the same time, the meta-algorithm does not depend on any concrete priority function, which means that many different priority functions can be used with the given meta-algorithm. As a consequence, the meta-algorithm can use priority functions which optimise different objectives. Note that the condition “valid customer” may have a very different meaning for different VRP variants. For instance, in CVRP this will only constrain the available choices to those customers whose demand does not exceed the remaining capacity of the current vehicle. For VRPTW, on the other hand, this will also constrain the choice to those customers which can be serviced in the defined time frame. The selection of the next valid customer to service is left entirely to the priority function. The definition of “best value” of the priority function is quite arbitrary, but in this case we use the lowest returned value as the best one (other options include the maximum value, minimum absolute value etc.). For instance, if the priority function equals simply the distance to the customer, then the same priority function will be evaluated for every possible customer, and the customer with the lowest priority value (the smallest distance) will be selected as the next customer for this vehicle.
Another meta-algorithm we propose is a parallel one that builds the schedule concurrently for every vehicle. This variant is defined as Algorithm 2. The parallel algorithm requires one important input, which is the current number of vehicles. If the given number of vehicles is insufficient to construct a valid schedule, then this value can be increased and the algorithm rerun. However, in our simulations this is not needed for the following reasons. While the serial meta-algorithm can be used in static conditions, where the schedule is constructed beforehand, it cannot be used during the actual execution of the system, for instance after an interruption has happened (such as a vehicle failure). In the case of dynamic conditions, we can use the parallel meta-algorithm to construct the remainder of the schedule, and in that case, the current number of vehicles is always known to the algorithm. The presented approach with the parallel meta-algorithm can also be used for stochastic VRP, where the actual parameter values are not known with certainty until the related event occurs. While we do not model a stochastic VRP in our experiments, the parallel algorithm can be readily applied in those conditions, since it builds the remainder of the schedule starting from any given moment in time with an arbitrary system state. Furthermore, for environments such as CVRP, the required minimum number of vehicles can always be determined beforehand based on given demand, vehicle capacity and other possible constraints.
| Algorithm 2 Parallel VRP meta-algorithm |
Input: number of vehicles to use - 1:
while there are customers to service and available vehicles do - 2:
wait until at least one vehicle is available (advance time); - 3:
if no valid customers then - 4:
end route by returning the vehicle to the depot; - 5:
end if - 6:
nextCustomer ← customer with the best value of the priority function; - 7:
add nextCustomer to current route; - 8:
end while
|
The time complexity of priority scheduling depends on the meta-algorithm, but it is in most cases negligible compared to search-based techniques, which allows using this method for on-line scheduling [
49] and in dynamic conditions. It should be noted that the priority function must be previously evolved. The evolution process itself may take several hours on average, but this can always be performed offline, before the actual scheduling occurs.
3.4. Genetic Programming
Genetic programming [
50] is an optimisation and machine learning method that uses simulation of evolution to automatically discover symbolic solutions (functions and programs) to the problem at hand. The main idea behind GP is that the solution to the problem may be represented as a (computer) program, in most applications in the form of a syntactic tree. The elements of the programs (tree nodes) must be predefined by the user and must be sufficient to describe the solution to the problem (e.g., mathematical and logical functions, variables, actions such as move forward, turn left etc.). In this case, we restrict the solutions to priority functions consisting of arithmetical and logic operators, as well as variables corresponding to the current VRP state. The algorithm randomly generates a set of trees (potential solutions) and evaluates each one on a predefined set of test cases. Test cases describe how well the candidate solution solves the given problem, e.g., how well does the function represented in the tree describe the data. In this paper, test cases will be represented by different VRP instances. Each potential solution thus receives its quality estimate - the fitness value - which is then used in the selection process.
The selection process imitates natural evolution where weaker solutions (individuals) are eliminated, and better individuals survive. Additionally, better individuals also participate in recombination, where two or more individuals are combined to form a new one. The algorithm also incorporates a mutation mechanism, where a single individual undergoes a random change, with a relatively small probability. The process continues, building new generations from old ones until a suitable termination criterion is reached. Termination criteria usually include finding a solution of the desired quality, evaluating a given number of potential solutions or running the algorithm for a predefined amount of time. The examples of human competitive results of genetic programming may be found in [
51]. For priority functions evolution, the Evolutionary Computation Framework (ECF)
http://ecf.zemris.fer.hr/ (accessed on 3 October 2022) was used.
3.5. Creating Priority Functions with GP
In this paper, genetic programming is used to automatically create the priority function used in the above meta-algorithms. The priority function is represented as a syntax tree, where inner nodes are operators and leaves are terminals (function inputs, domain variables). The operator and terminal set must be previously defined and they should give the GP information needed to construct an adequate priority function. In this work, we use the following operators (functional elements and inner nodes of a tree) listed in
Table 1.
This function set is based on our previous experience with GP, as well as on a small set of tuning experiments to estimate the efficiency of individual operators. Aside from these, we define a separate terminal set (set of variables, tree leaves) for each considered VRP variant. For example, all the variants will include the terminal
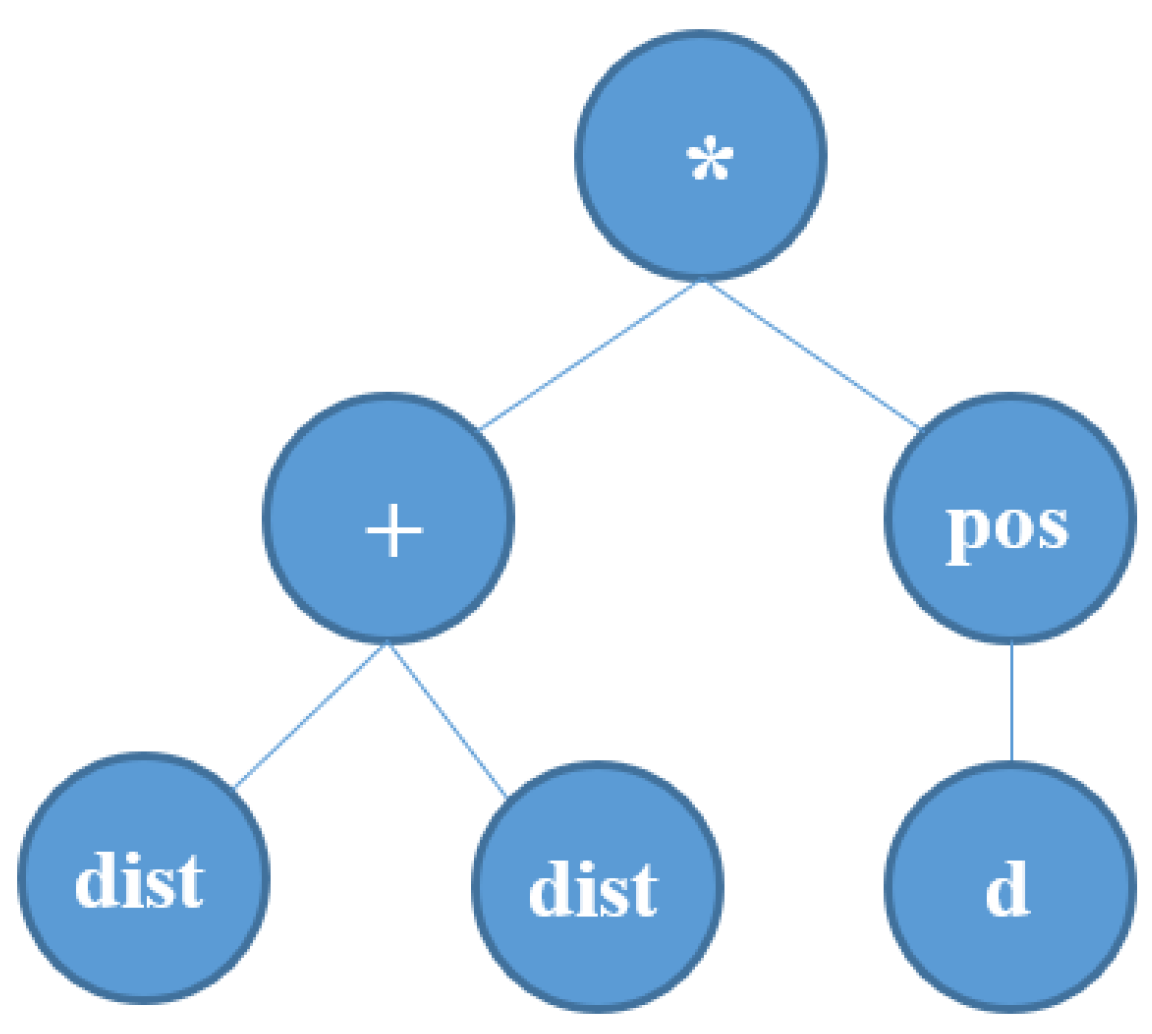
dist, which simply gives the distance of the current considered vehicle to the current considered customer. This way, the GP is able to create new priority functions that match the current conditions and user-defined criteria. GP uses the standard tree representation to encode priority functions. An example of a random GP tree that denotes a potential priority function of a DR is shown in
Figure 1 (the terminal sets are defined below).
GP creates a set of priority functions (individuals) in each generation, and each of those must be evaluated. The initial population is generated using the standard ramped half-and-half solution initialisation method. After the whole generation is evaluated, genetic operators (crossover, mutation and selection) are performed, thus producing the next generation of individuals (new candidate functions). The whole process is repeated until a predefined stopping criterion is met.
The evolutionary algorithm in this work uses a steady-state selection process, shown in Algorithm 3, where in each iteration only one individual from the population is replaced with a new one. The selection of the individual to be replaced is performed in a tournament of size three: the algorithm selects three individuals at random and eliminates the worst of those. The remaining tournament survivors are then used as parents to create a new individual using crossover. The crossover operators used are simple tree crossover, uniform crossover, size fair, one-point, and context preserving crossover [
5], selected at random each time a crossover is performed. Following its creation, the new individual immediately undergoes mutation, which depends on the mutation rate parameter. In our experiments, this parameter equals 0.5, which results in five out of ten new individuals being mutated on average, and the operator is sub-tree mutation [
5]. This kind of algorithm is convenient since it eliminates the need for specifying the crossover rate, and based on our previous experience provides a steady rate of convergence. Regarding the choice of genetic operators, in our previous experience with hyper-heuristic applications, different operators did not have a significant impact. In summary, we use the parameters for genetic programming as given in
Table 2.
| Algorithm 3 Steady-state tournament selection |
- 1:
while termination condition not satisfied do - 2:
randomly select k individuals; - 3:
remove the worst of k individuals; - 4:
child ← crossover (best two of the tournament); - 5:
perform mutation on child, with given individual mutation probability; - 6:
insert child into the population; - 7:
end while
|
Finally, in all the experiments we evolve the candidate priority functions on the learning set of problem instances, selected for the given VRP flavor. Each individual is evaluated by optimising a selected criterion (number of vehicles, total distance, total tardiness, or combinations of these criteria) on each instance in the problem set. The total fitness value on the problem set is calculated as an aggregation of the individual fitness values obtained on each of the problem instances. However, the final set of evolved priority functions are evaluated on a separate test set of problem instances, which is a common procedure in machine learning. This cross-evaluation estimates the generalisation ability of the proposed approach, and separate learning and test sets are defined for every considered problem variant.
4. Experimental Setup
To test the proposed approach of automatically designing DRs for the VRP, the GP method described in the previous section is applied on two VRP problem variants: CVRP and VRPTW. Furthermore, both variants are investigated under static and dynamic case. The static case denotes the case in which all customers are known beforehand, meaning that all the information about the problem is known at the start of solving. On the other hand, in the dynamic case, not all customers are known at the start, but rather they become available as time progresses. In this case, we investigate the influence of different level of dynamism on the performance of the method, 5%, 25%, and 50%, which denote the number of customers that are not known up front and become available at a later point in time.
To test the approach for CVRP the problem instances proposed by Golden et al. are used [
52], whereas for the VRPTW variant the instances proposed by Solomon are used [
42]. Both problem sets are divided into a training set, which is used by GP to evaluate the rules during the evolution process, and a test set, which is used after training to evaluate the quality of the evolved rules on unseen instances and compare the results. The division of the problem sets is described in more detailed in the subsequent sections. The approaches are evaluated across several criteria that are commonly considered in VRP problems, which include the number of vehicles, total travelled distance, and total tardiness. These criteria are combined in different ways using a weighted linear combination, as will be outlined in more detail at the corresponding parts in the next two sections. Apart from these two criteria, another criterion called the distance deviation (more details about which are given in
Section 6.3) is also used to demonstrate the ability of the approach to generate DRs for an arbitrarily defined user criterion. The results obtained by the proposed method are compared with the best known results for the problem instances known in the literature, as well as with simple manually designed DRs which present the most similar approach from the literature to the automatically developed DRs.
6. Solving VRPTW with the Hyper-Heuristic Approach
When considering the static VRPTW model, we use the fitness function denoted in Equation (
2) (same as for the CVRP) for optimisation of priority functions.
The experiments for VRPTW were conducted on Gehring and Homberger benchmark [
53] containing problems with 200 to 1000 customers. For all problem instances, travel time and distance are equal to the corresponding Euclidean distance [
54]. Separate experiments were conducted on groups with 200, 400, 600, 800 and 1000 customers; out of each group, 40 test instances were selected as the learning set, and 10 of the remaining instances were used as the test set. The learning process is performed in static conditions, while the dynamic variant is evaluated in the following subsection.
In addition to functional elements in
Table 1, we define the following terminals for GP in the VRPTW environment, as given in
Table 6. This terminal set is an extension of the terminals used in CVRP, with the addition of time-dependent information for each vehicle. The terminal waiting time denotes the amount of time the vehicle will have to wait for customer’s ready time (window opening) if it selects this customer for servicing next.
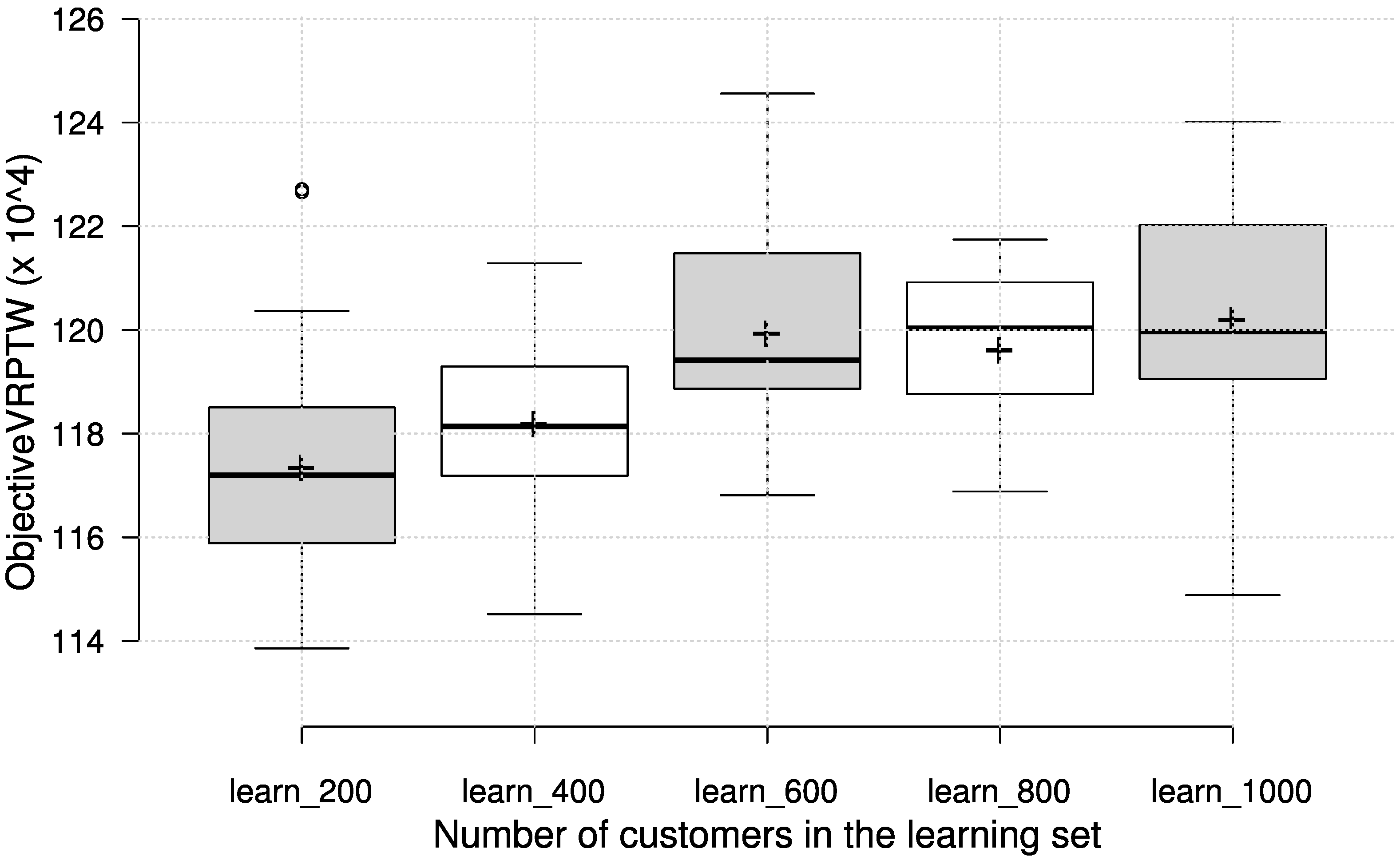
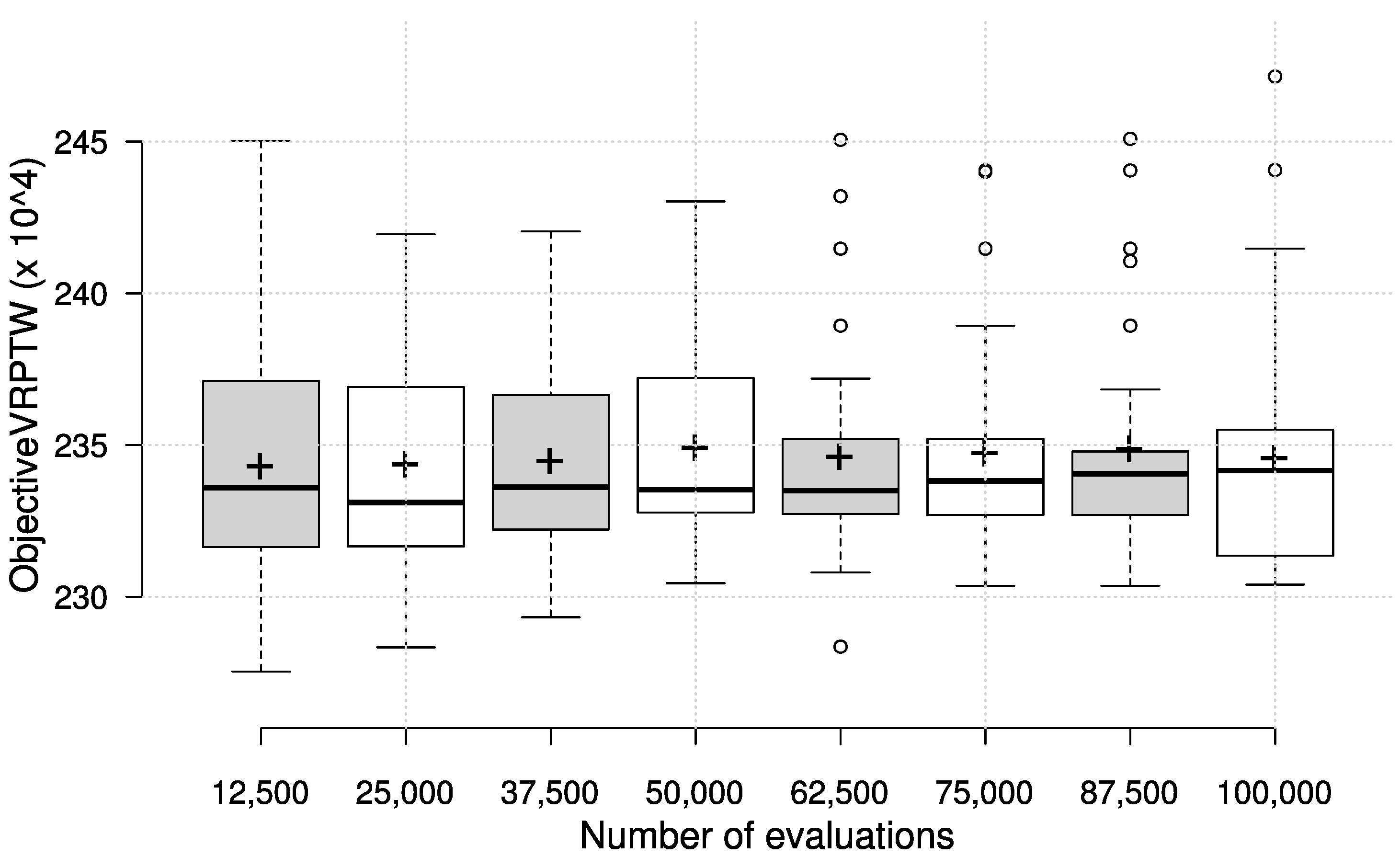
After the learning phase, the resulting solutions were evaluated on the test set.
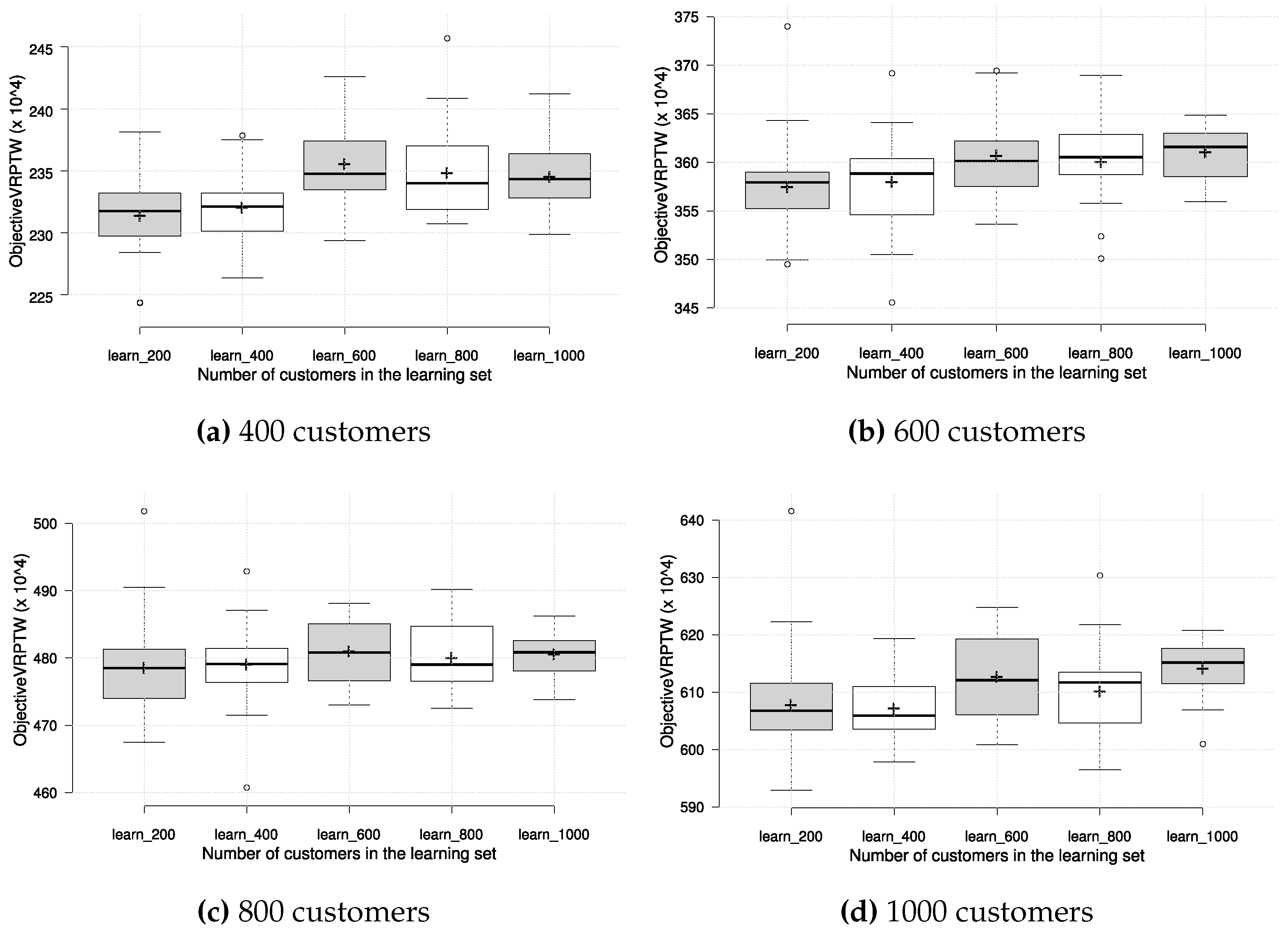
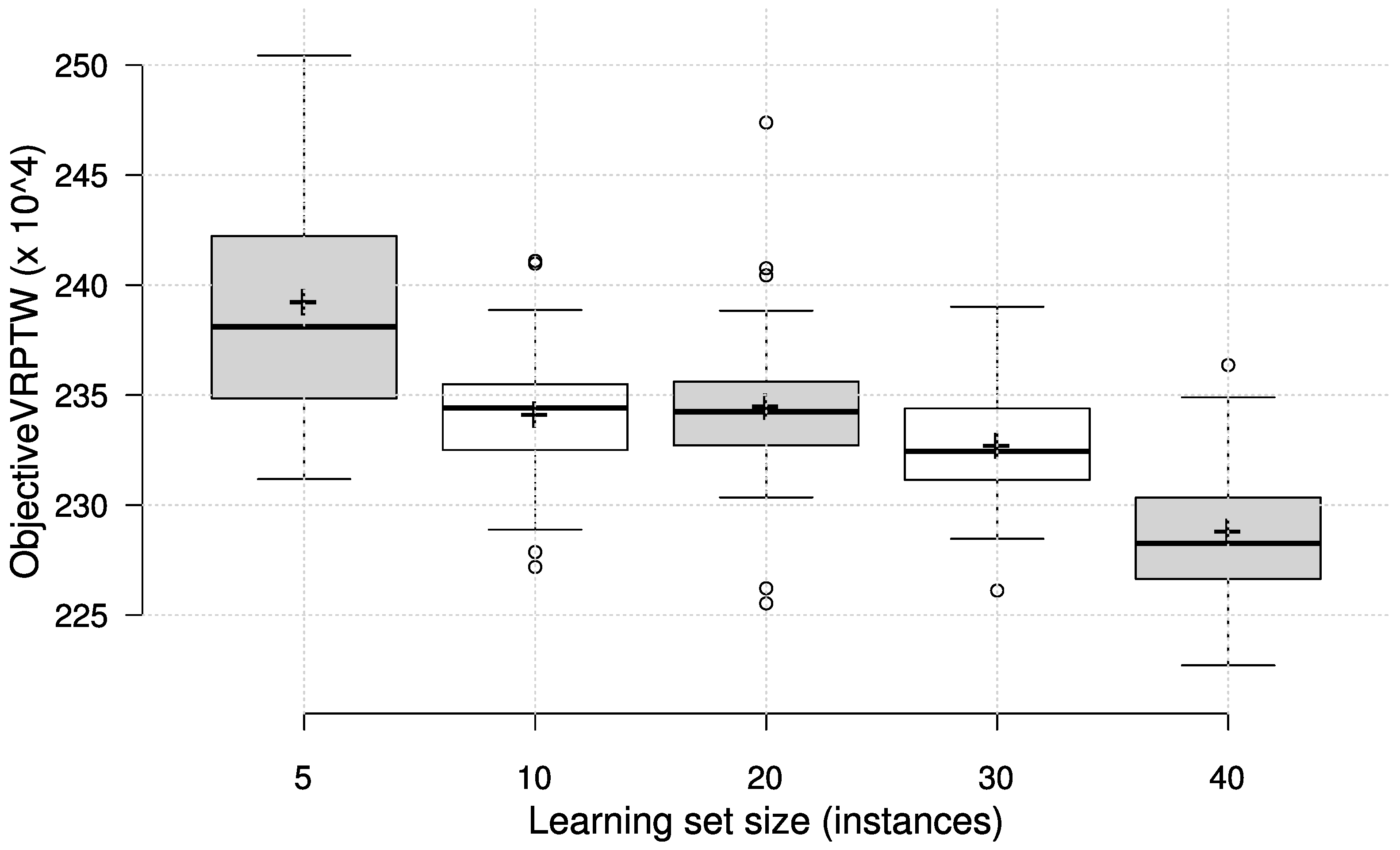
Figure 3 shows the results obtained on a test set with 200 customers, but also presents the results of each group of priority functions obtained by learning on different learning set sizes. Since the results suggest that learning on a larger set of customers does not bring an improvement, we have evaluated the solutions, obtained on the learning set with a given number of customers, on each test set with a different number of customers. The purpose of this cross-evaluation was to identify any dependence of the number of customers in the learning phase on the effectiveness of priority functions on problem instances with a different customer number. The results in terms of box plots on the test set are given in
Figure 4, with the circles representing outliers and the ’+’ symbol representing the average value.
It can be observed that the number of customers in the learning set does not influence the final effectiveness to a great extent, which can be considered a good trait for scalability to larger instances. It is interesting to note, however, that the priority functions learned on a smaller number of customers generally achieve the best results, regardless of the number of customers in the test set. This is encouraging, since less time can be spent on learning with smaller number of customers, and still be able to obtain solutions that cope well with different problem sizes. To illustrate the absolute quality of the generated solutions, we compare the obtained number of vehicles on the test set with best known results for the chosen test set instances
https://www.sintef.no/projectweb/top/vrptw/homberger-benchmark (accessed on 3 October 2023); the results are shown in
Table 7.
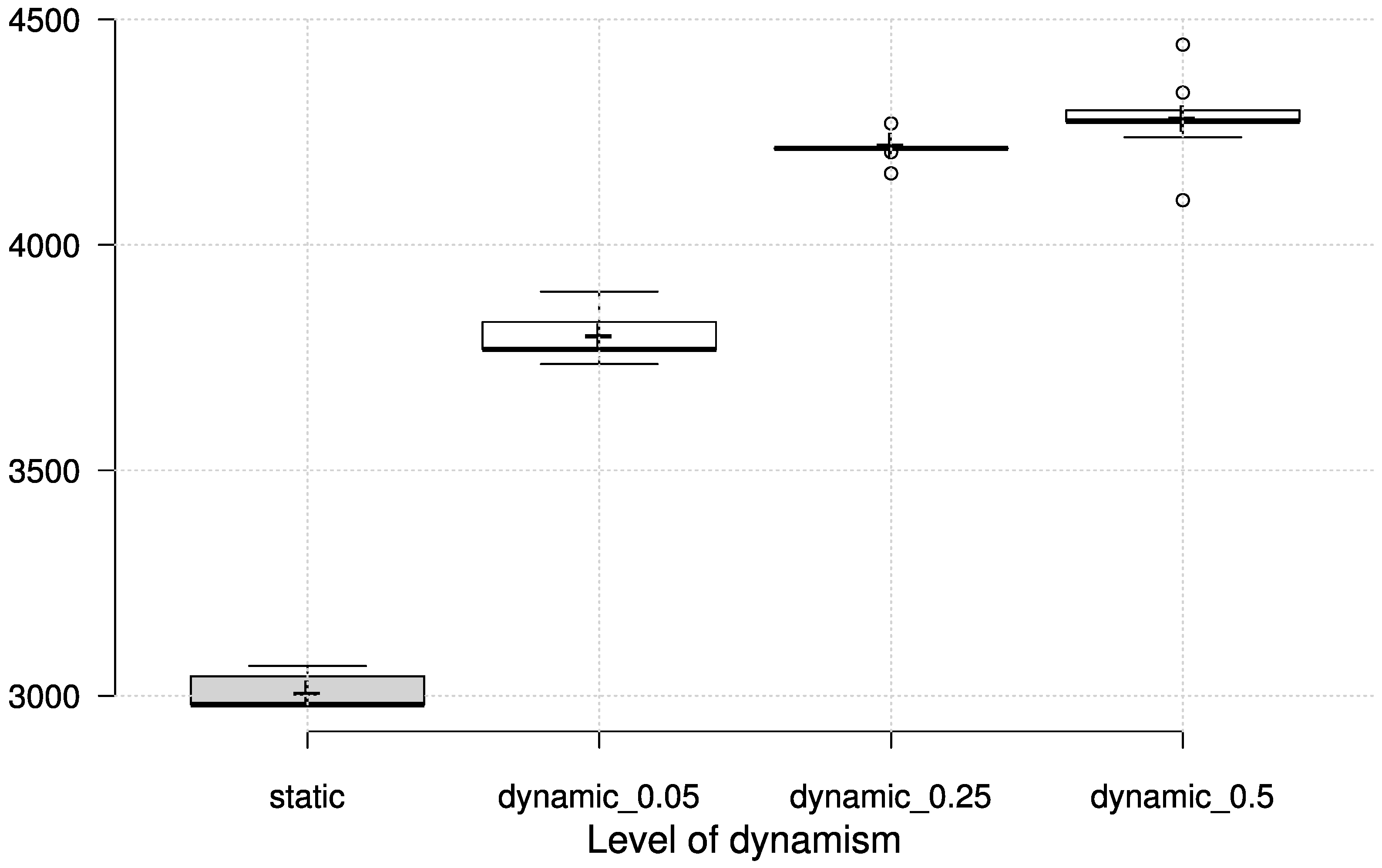
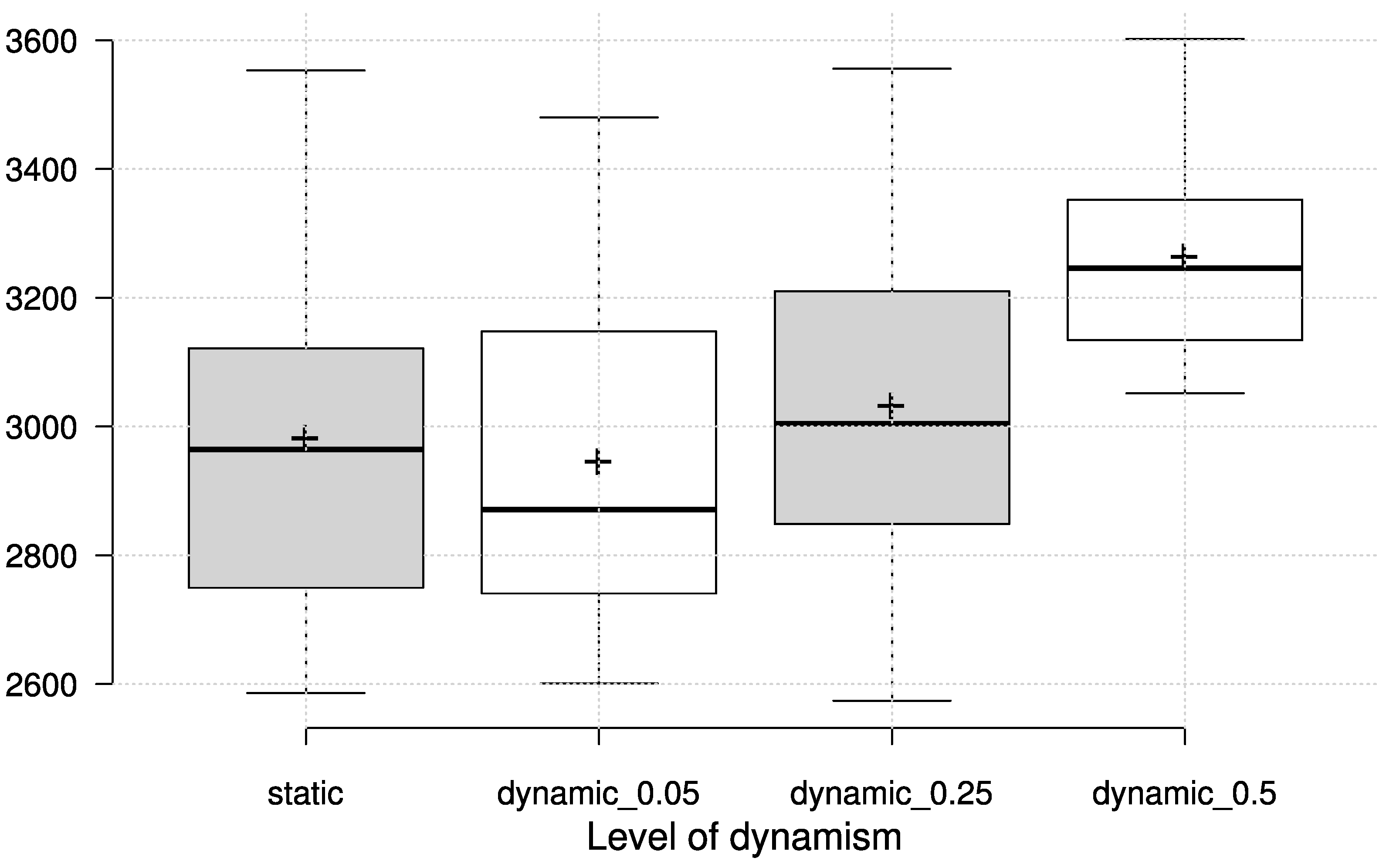
6.1. Evolved Heuristics in Dynamic VRPTW
Dynamic conditions for VRPTW are simulated in the same way as for the CVRP, where a given percentage of orders (5, 25 and 50 percent) is not known at the beginning, but revealed at a certain point in time. The dynamic scenario is simulated on the VRPTW test case with 200 customers, based on Solomon’s type “RC” example as outlined in [
40,
42]. Following the same recommendations, the number of vehicles is set to 15. Apart from the GP-evolved dispatching rules, we employ the “earliest first” rule (EF), which selects the customer whose servicing can be started the soonest (also taking into account the travel time to that customer), and the “most urgent first” rule (UF), which selects the customer whose window closing time (due date) is most urgent. The results for the GP priority functions in terms of total travelled distance are shown in
Figure 5 and
Table 8 along with the EF and UF heuristics.
It can easily be seen that the GP-evolved priority functions manage to encapsulate the dynamic changes and adapt to new information. In this particular case, the “nearest neighbour” heuristic can also produce competitive travel distance, but at the same time incurs a number of unserviced orders (up to 26 for the most dynamic scenario), which makes it inappropriate in this setting.
6.2. Creating Heuristics for VRPTW with Soft Time Windows
As an example of adaptability of the proposed approach, we tackle the VRPTW variant with soft time constraints [
55,
56]. In this case, we allow the requests to be serviced outside the defined time window, but which induces additional cost. This cost is usually proportional to the time window violation, but the actual cost estimate may be formulated in any possible way.
To accommodate for soft time window constraints, the only change that must be made is the definition of a “valid customer” in the meta-algorithm. Instead of disregarding all customers that cannot be reached before the due date, we can introduce an additional amount of tolerance. In our experiments, the maximum time window tolerance is set to be twice as large as the denoted service time. This is completely arbitrary and may be defined to match the customer preferences, and even be modeled after individual customer constraints (e.g., delays at different types of customers incur different costs). Additionally, a variable tard is added to the GP set of terminals; this variable represents the tardiness of service if the current customer is selected (the value is zero if no tardiness is incurred if this customer is selected).
With these changes, the user can define a modified fitness function to measure the impact of tardiness of customers services. For the GP algorithm, the fitness function was modified as outlined in Equation (
3), in which
totalTardiness denotes the amount of time that the service at all customers has been delayed.
The weight factor
denotes the magnitude of tardiness in relation to travelled distance, and equals 1 in this study. Note that this is also completely arbitrary and adaptive, since the tardiness cost may be additionally scaled to have a greater or smaller impact relative to other elements in the fitness.
The learning process with soft time windows was repeated on the same learning set as for the regular VRPTW. The results for this experiment were validated on the same test set of 10 problem instances with 200 customers and are shown in
Table 9. The results are compared to best known values with hard time window constraints, as well as GP heuristic results (given in the first two rows of the table). When soft time constraints are introduced, we can perceive a slight decrease in the number of vehicles, which means the heuristic is able to reduce vehicle count with the increase in total service tardiness. At the same time, the total distance is not changed substantially, which shows the applicability of the devised priority functions. To further reduce the number of vehicles, an appropriate scaling factor associated with tardiness could be introduced by the user in the objective function.
6.3. Evolving Heuristics for an Arbitrary Optimisation Criterion
Since existing heuristics were usually designed to address certain criteria, they may not be appropriate for application under an arbitrary criteria defined in a concrete problem instance. Tackling an arbitrary optimisation criteria is possible with search-based metaheuristics such as evolutionary algorithms, but they exhibit already-described disadvantages in the dynamic scheduling scenario. As mentioned before, the proposed approach can produce routing heuristics for any conceivable objective measure, since the process of evolution is guided with an arbitrary fitness function. To apply this approach with an arbitrary optimisation criterion, the user must provide relevant parameters to calculate the objective value. These parameters may include information about the vehicles, their travel times and distances, or about servicing times at previous customers etc. In any case, we presume the schedule maker is able to collect information that is relevant to its designated criteria and provide that information to the learning algorithm.
To illustrate the applicability of this scenario, we introduce another optimisation criteria that considers the deviation of travel time of individual vehicles; this may be the case of a given fleet size, where vehicles should complete their respective routes in approximately the same time. The choice of this particular objective is entirely arbitrary and serves only as a case study. The objective function in this experiment is outlined in Equation (
4), where
distanceDeviation is calculated as mean squared deviation from the average travel time of all the vehicles in a single problem instance.
The results of this experiment are shown in
Table 10. The upper half of the table shows the results obtained with the initial objective criterion for VRPTW, while the bottom half presents results with the above objective (both sets of results correspond to GP heuristics). It can be seen from the bottom half of the table that the travel time deviations are indeed smaller than in the case of total distance minimisation. It is somewhat surprising that this objective contributes to the decrease of total travelled distance; however, this is accomplished with the increase in the number of used vehicles.


 ,
, 








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}