1. Introduction
Model-based Software Engineering (MBSE) is a software engineering paradigm that endorses the use of models as first-class artifacts [
1]. A model can be defined with a domain-specific modeling language (DSML) [
2], which provides modeling primitives to capture the semantics of a specific application domain (such as web-based languages) or can be defined using a general-purpose modeling language (such as the UML). The main goal of MBSE is to enhance the development, maintenance, and evolution of complex software systems by raising the level of abstraction from source code to models. In particular, the use of DSMLs allows developers to focus on their essential tasks while the recurring engineering tasks are lifted to higher abstraction levels and automatically generated by transformations specified by domain experts [
3]. The use of the MBSE paradigm is beneficial because it allows engineers to focus on the product to be developed and on generic and reusable assets that express problems and solutions. Other measured or claimed benefits of MBSE include better communication, effectiveness, and quality compared to pure code-oriented approaches [
4,
5].
In MBSE, models expressed using any modeling language often undergo continuous evolution during their lifecycles. For example, such evolution can occur when new requirements are added or existing requirements are changed as engineers gain better understanding of the domain to be modeled. Models can evolve over
time, resulting in a family of related models, which we refer to as a
model family, with differences and similarities between family members. Another common source of model families is found in (software) product lines, where different configurations of a product can exist simultaneously (i.e., in the same
space dimension) for different customers without necessarily being caused by evolution over time. Model families can result from having several alternatives due to design-time uncertainty or uncertainty at other stages of the development process. In such cases, all models need to exist together (as a model family) to tolerate a certain level of uncertainty until decisions absolutely need to be made [
6]. Finally, a model family can appear as a result of
both evolution over time and variation over space, such in the case of a set of software/product configurations that evolve over time [
7].
The phenomenon of model families can be observed in several domains, including the
regulatory domain, where regulations evolve over time and have variations (e.g., for different regulated parties or different versions of regulations) that need to be modeled using slightly different individual models, resulting in a
family of related regulatory models [
8,
9]. In regulatory domains it is usually desirable to analyze models, for instance, for compliance assessment by regulators. However, the existence of several versions/variations of models makes it cumbersome and inefficient to analyze and reason about these models one at a time. This challenge was observed in practice through our previous experience in modeling and analyzing safety regulations at Transport Canada; the number of models in a model family can be very large due to multiple versions and variations that nonetheless share many elements in common. Exploiting this redundancy during analysis has the potential to reduce the effort and time required for analysis.
This paper is based on the first author’s PhD thesis [
10], and proposes
union models as first-class generic artifacts to: (1) support the representation of model families (for time and space dimensions) using one generic model; (2) achieve performance gains during analysis of model families
all at once, compared to analysis of individual models,
one model at a time; and (3) support types of analyses that are more easily feasible with union models compared with individual models.
The use of union models is challenging and non-trivial. At the model level, the challenges stem mainly from the following requirements:
- Req. 1
Models in a family shall be captured (in both dimensions of variability) in a complete and exact way such that all and only individual members of a family are included in one union model.
- Req. 2
The resulting union model shall be as compact as possible, in the sense that it should not contain redundant elements, especially when there are many elements in common between models.
- Req. 3
The union model shall be self-explanatory, i.e., it should be supported with a mechanism that distinguishes which elements belong to which models.
There are other challenges at the
metamodel level associated with the use of union models. In particular, a union model may
not be a valid instance of the language’s metamodel, and the latter might need to have its constraints relaxed accordingly. The metamodel-level challenges have been already discussed in our previous work [
11], and are outside the scope of this paper.
This paper extends previous work in [
12] with a complete formalization of union models, including annotations, and enhanced experiments with a deeper analysis, and empirically demonstrates the usefulness of union models for analyzing a family of models
all at once compared to individual models
one model at a time. The main contributions of this paper are:
- 1.
A language-independent graph-based formalization of model families and union models;
- 2.
A generic language-independent algorithm to produce a union model from a set of models (in a compact and exact manner) in a given language (satisfying Req. 1 and Req. 2);
- 3.
A Spatio-Temporal Annotation Language (STAL) to support the representation of variability in model families in the space and time dimensions and to facilitate reasoning about union models (satisfying Req. 3); and
- 4.
Improved efficiency of analysis and reasoning over a set of models all at once using union models, compared to reasoning on single models one model at a time.
As our approach starts with existing models as input, how such models are constructed in general is beyond the scope of this paper.
From a methodological perspective, this paper first presents the motivation behind this work in
Section 2. Then, the theoretical and algorithmic foundations of our work are presented in the next three chapters, specifically, a graph-based formalization of model families (
Section 3), a complementary Spatio-Temporal Annotation Language (
Section 4), and the propositional encoding of models (
Section 5). To determine how efficient and beneficial the reasoning and analysis with union models are, reasoning tasks and the experimental setup are first presented in
Section 6, whereas empirical results and threats to validity are reported in
Section 7. A discussion of closely related works is covered in
Section 8. Finally,
Section 9 concludes the paper.
2. Motivation
This work was inspired by issues faced previously with regulation modeling in collaboration with Transport Canada, where there are regulations that evolve over time and that apply to different types of organizations (i.e., spaces). We explain the challenges associated with regulatory model families and motivate our proposed solution using a running example from this domain, namely, airports regulated by Transport Canada, where we use the Goal-oriented Requirement Language (GRL) as a modeling language. GRL is a part of the User Requirements Notation (URN) standard [
13].
Without loss of generality, the subsequent discussion about GRL model families in regulatory domains and their challenges is applicable to other model families from modeling languages other than the GRL. Therefore, we posit that our approach is feasible for any metamodel-based modeling languages and their model families.
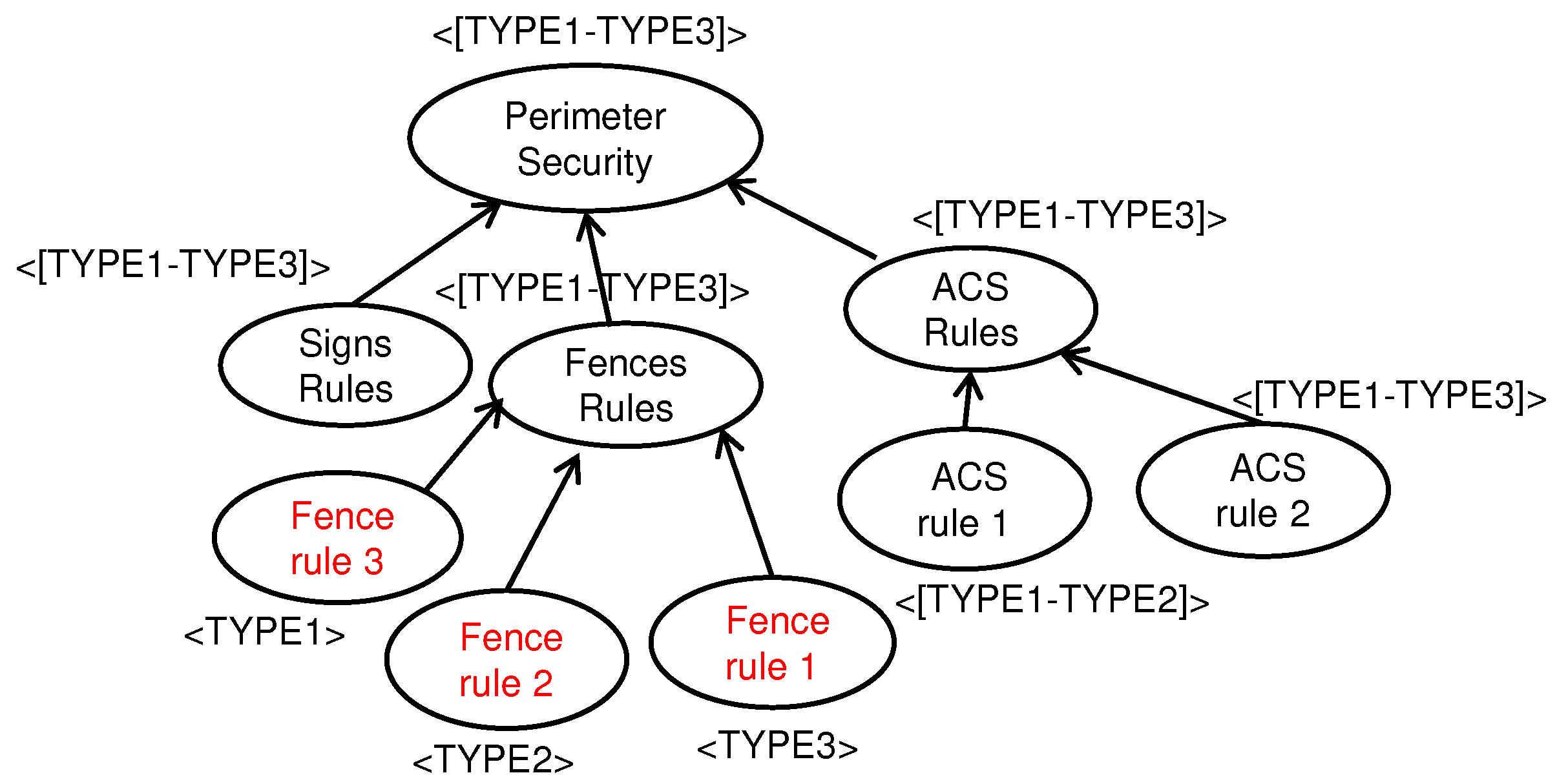
At Transport Canada there are many regulations that need to be modeled by regulators, for example, to enable compliance and performance assessments. These regulations evolve over time, and apply to multiple types of organizations (such as aerodromes and airlines) of different sizes [
8,
9]. For example, as
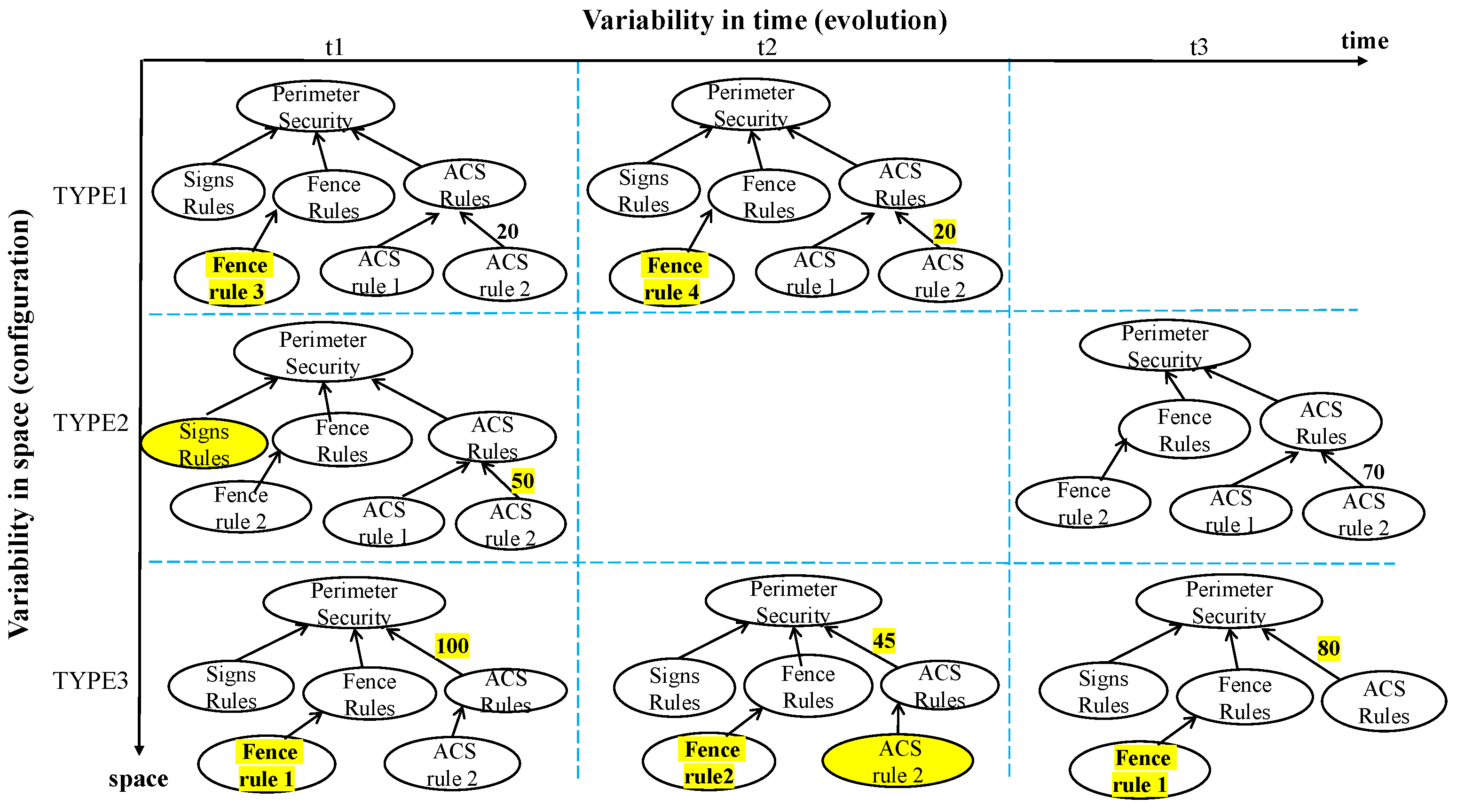
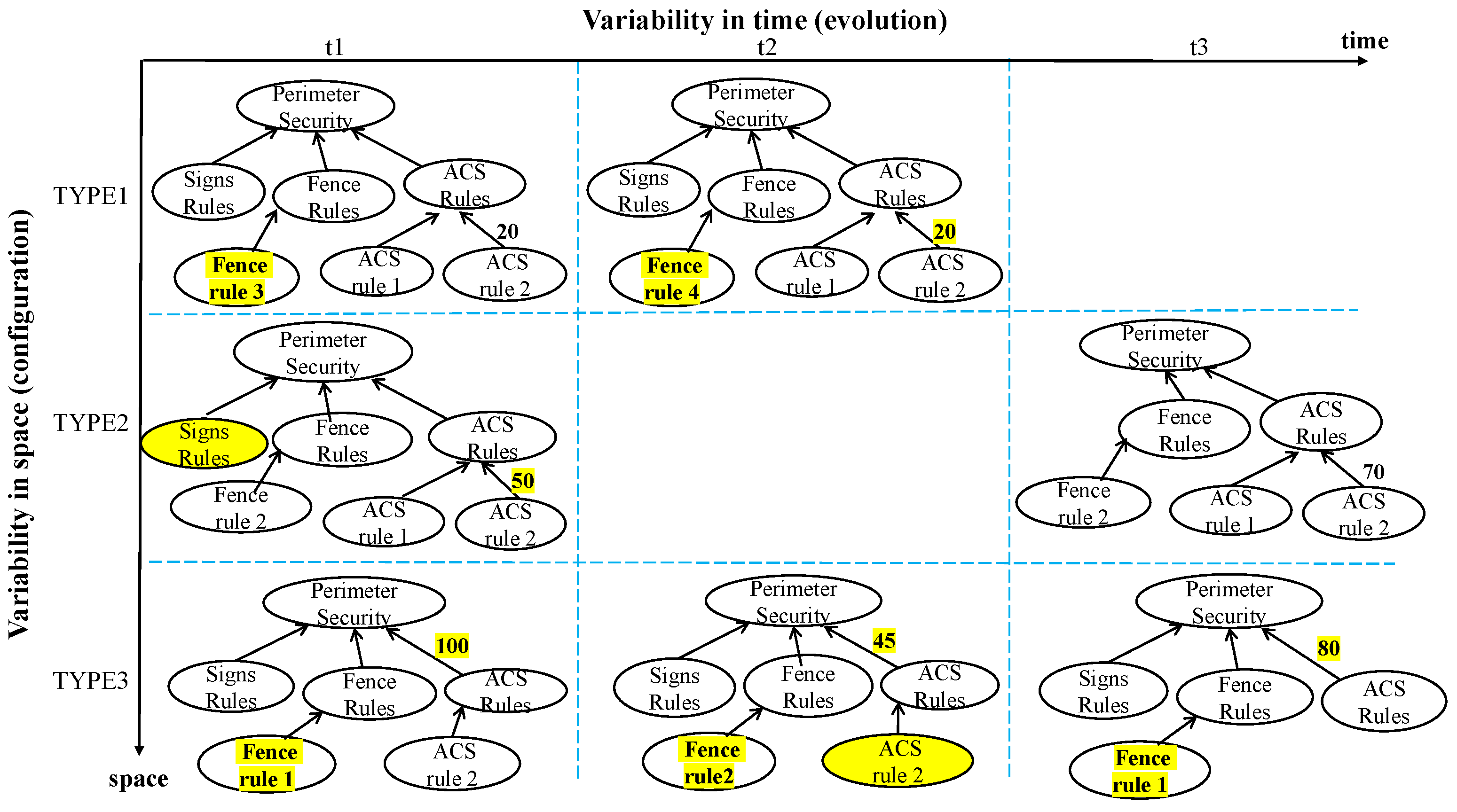
Figure 1 shows, certain rules/regulations apply differently depending on the targeted aerodrome type (configurations modeled abstractly here as TYPE1, TYPE2, and TYPE3), while other regulations are only applicable to specific aerodrome types. In
Figure 1, regulations related to Fence rule 3 are only applicable to aerodrome TYPE1, Access Control System (ACS) rule 2 is applicable to all aerodrome types, and ACS rule 1 is applicable to TYPE1 and TYPE2 aerodromes but not to TYPE3 ones.
The different aerodrome types (i.e., TYPE1, TYPE2, and TYPE3) can be considered as different
configurations (or spaces) that are available at the same time for different aerodromes. This means that the three goal model variations depicted in
Figure 1 represent a goal model family along the space dimension, where each space has different regulations. Goal models in this family can evolve over time, e.g., when the regulatory context evolves, resulting in several versions of the same model. Evolution of goal models can involve the addition/deletion of goals and/or links or modifications to attributes of goals and/or links, as illustrated in each row of
Figure 2. In this figure, the time-related changes across each of the initial configuration models (from
Figure 1) are highlighted in Yellow.
Analyzing the different versions/variations of models in
Figure 2 individually using one goal model per type of aerodrome and at each time instance is impractical for the following reasons:
- 1.
If a modeler plans to conduct goal satisfaction analysis (using some GRL forward propagation algorithm [
13]) on each individual model by running a strategy that initially assigns ACS rule 2 to study the impact of its satisfaction on the satisfaction of other goals, she would end up running the same evaluation algorithm six times for this example, even though there are several common elements among the seven models. Intuitively, if there are
M individual models in a model family and each model has
E elements, then the complexity of running a satisfaction propagation algorithm on all models would be on the order of
. Such complexity becomes more significant if there are hundreds of models with hundreds of elements in each model, which is not an atypical situation.
- 2.
Each individual model (e.g., goal model for TYPE1 at time t1) does not represent the whole set of regulations per se. Hence, a regulator who wishes to reason about all regulations (e.g., to study the evolution trend of regulations over time) would have to check all models one model at a time and reason about each one separately. This process becomes inefficient and time consuming as the number of models increases.
- 3.
Models in a model family are subject to frequent evolution over time that are asynchronous by nature. Such asynchronous evolution sometimes requires that older versions of models (which represent legacy models) need to be maintained, as they may remain in use even after being superseded by newer versions. This is an issue over the time dimension, and can be witnessed in the space dimension as well (i.e., along configurations). In this scenario, legacy models and new models need to co-exist together in one model in order to be analyzed together.
Similar challenges exist in the software engineering field, particularly in the Software Product Line (SPL) domain, where products vary over the space dimension and may evolve over time as well. By nature, an SPL encodes a set of related product variants; thus, dealing with the evolution of multiple products over time means that developers should consider an additional dimension of variability by reasoning about sets of products. This combination of variation and evolution is not well supported by existing SPL engineering techniques, and only a few recent approaches in the literature have tried to address this issue. For example, Seidl et al. [
14] and Lity et al. [
15] considered variation of SPLs in space and time and proposed a so-called 175% modeling formalism to allow for the development and documentation of evolving product lines. In their paper, they urged the community to extend annotative variability modeling to tackle evolution and variation by the same means. Famelis et al. [
16] proposed an approach for combining SPLs with partial models to represent design-time uncertainty. The resulting artifact, called Software Product Lines with Design Choices (SPLDCs), integrates variability and design-time uncertainty in a common formalism to help developers differentiate between the kinds of decisions that are relevant during the design and configuration stages of the SPL lifecycle.
The above-mentioned three challenges (especially the first one) and the gaps identified in the literature motivate the need to find a way to represent model families other than using separate individual models. This paper proposes
union models (
) as a generic modeling artifact to capture all model elements in all members of a model family
, aggregated in a compact and exact way such that analysis of a group of models is faster than for individual models and where members of a family can be extracted and analyzed. Generally speaking, a union model
of any potential model family would be the union of all elements
e in all individual models
of the family
; that is,
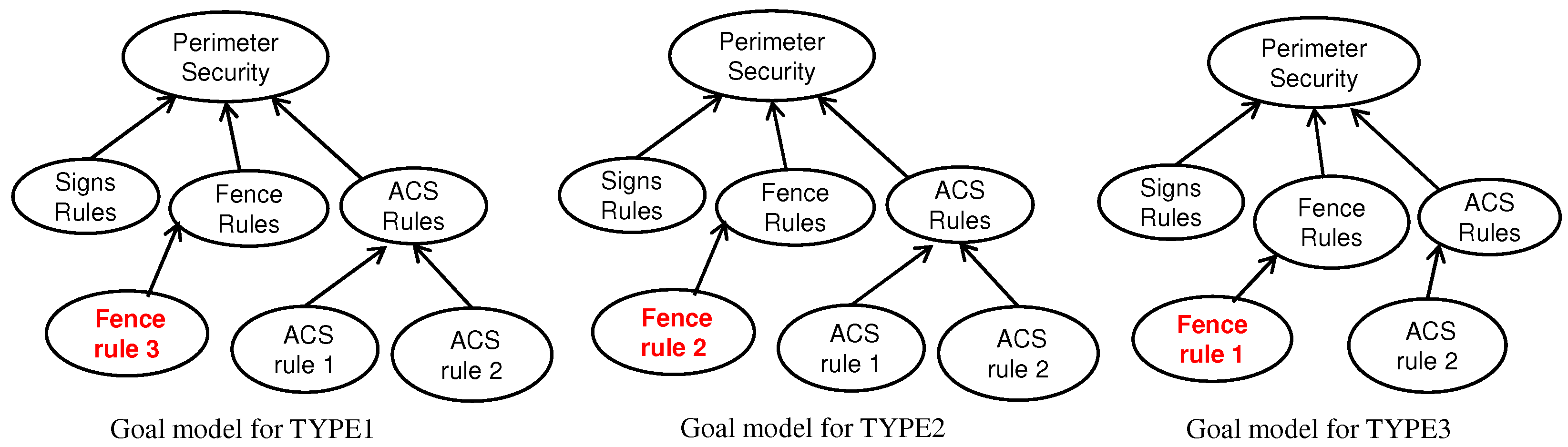
In addition, the elements of the resulting union model need to be annotated in a way that enables the identification of variants. For illustration purposes, an
that captures the model family shown in
Figure 1 is represented in
Figure 3, with all elements (i.e., goal and links) of the union model included and annotated with space information (TYPES in this example) to distinguish which element belongs to which model variant.
Note that each member of the model family is embedded in the union model, i.e., for each there exists an embedding defined by . Moreover, we can retract any model in the family from the union model by the partial mapping , where if e is annotated with and is undefined otherwise. Hence, the union model is complete in the sense that it includes all information available in any member of the modeling family, and is complete in the sense that we can reconstruct each member of modeling family from it.
3. Formalization of Model Families
This section illustrates the use of graphs and type(d) graphs to formalize basic (meta)modeling concepts.
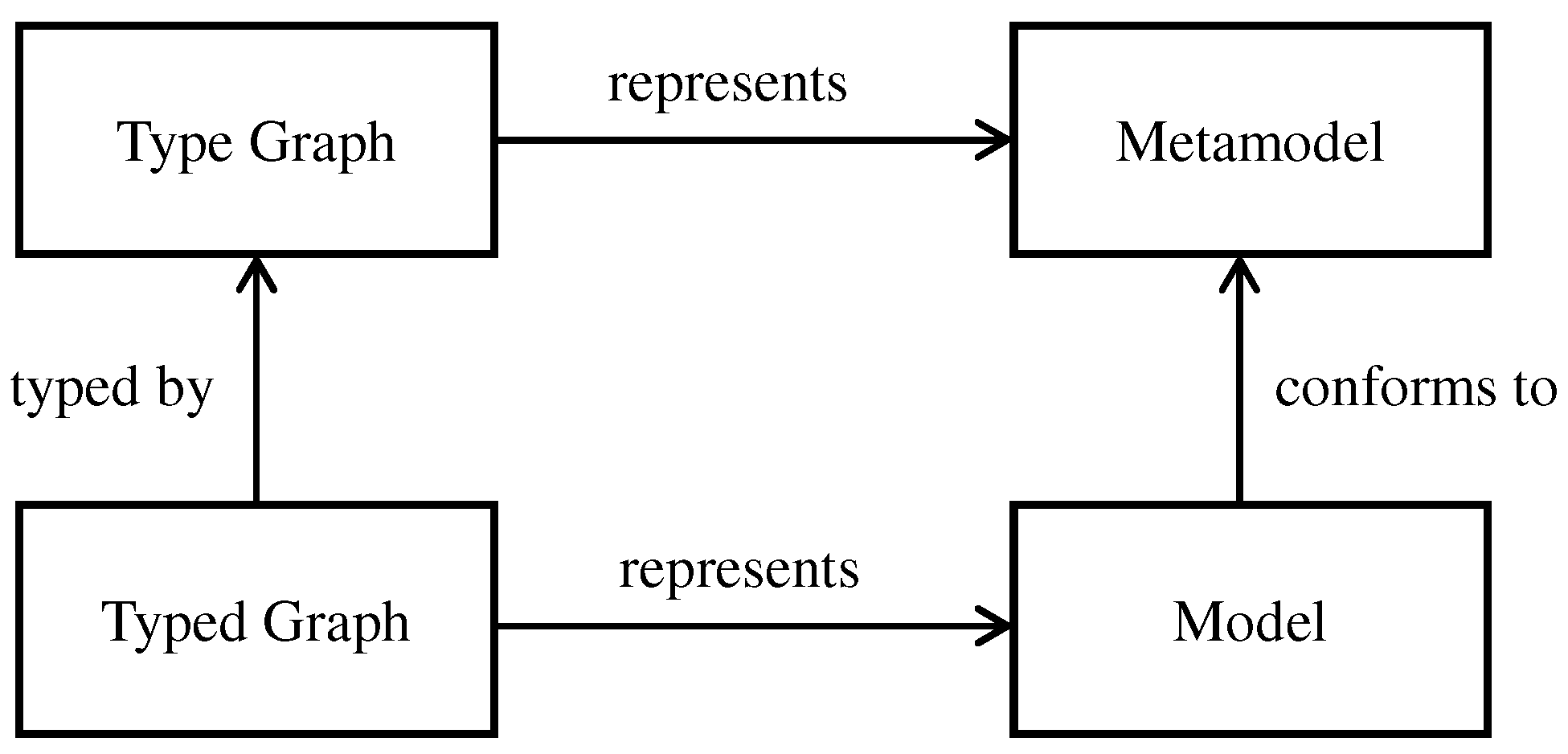
Figure 4 illustrates the basic relationships between models and metamodels and their graphical representation. The definitions of graphs and type/typed graphs are then used as a basis for further formal definitions of model families and their union models. To model more detailed aspects of model families, we extend the definitions of basic type(d) graphs with attributes (i.e., attributed type graphs, or
E-graphs [
17]). The definitions that follow are based on [
18,
19,
20].
Definition 1. Graph: A graph is a tuple G = (NG, EG, srcG, tgtG), where NG is a set of graph nodes (or vertices), EG is a set of graph edges, and functions srcG, tgtG: EG → NG associate to each edge a source and a target node, respectively, such that e: x → y denotes an edge e with srcG(e) = x and tgtG(e) = y.
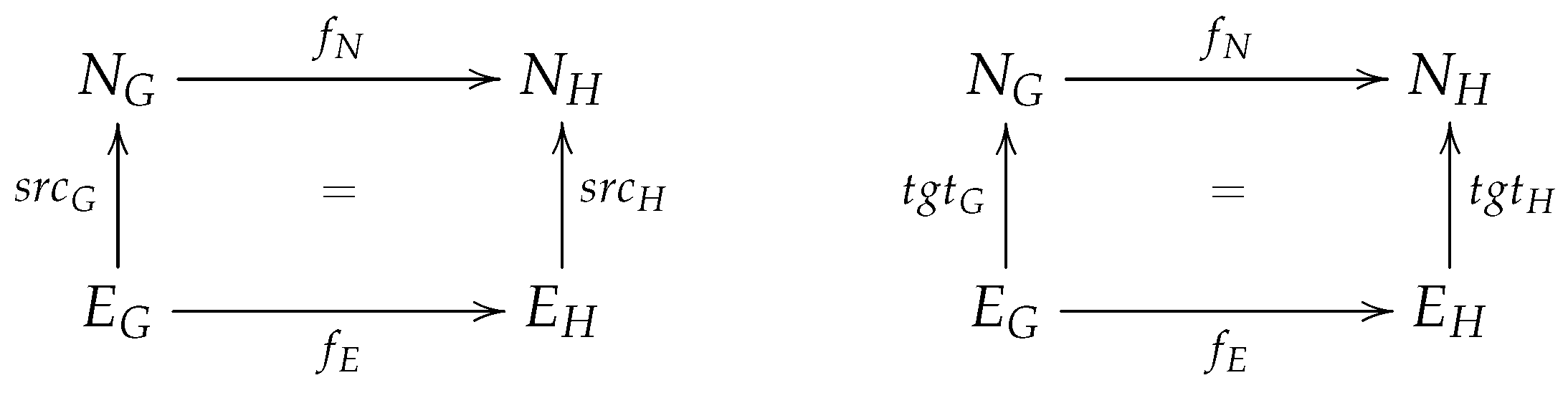
Definition 2. Graph morphism: Let G and H be two graphs. A graph morphism f: G → H consists of a pair of functions (fN, fE) with fN: NG → NH and fE: EG → EH that preserves sources and targets of edges when composed (∘), i.e., fN∘ srcG = srcH∘ fE and fN∘ tgtG = tgtH∘ fE. In other words, for each edge eG ∈
EG there is a corresponding edge eH = fE(eG) ∈
EH such that srcG(eG) is mapped to srcH(eH) and tgtG(eG) is mapped to tgtH(eH). This is illustrated in Figure 5. 3.1. Type Graphs and Typed Graphs
In graph theory (such as in strongly-typed programming languages, where each constant or variable is assigned a data type), it is often useful to determine the well-formedness of a graph by checking whether it conforms to a so-called
type graph. A type graph is a distinguished graph containing all the relevant types and their interrelations [
21]. This is analogous to the relationship between models and metamodels in the model-driven engineering world, where each model (e.g., a UML design model) needs to conform to a metamodel (e.g., of the UML language). The correspondence between both ideas is depicted in
Figure 4.
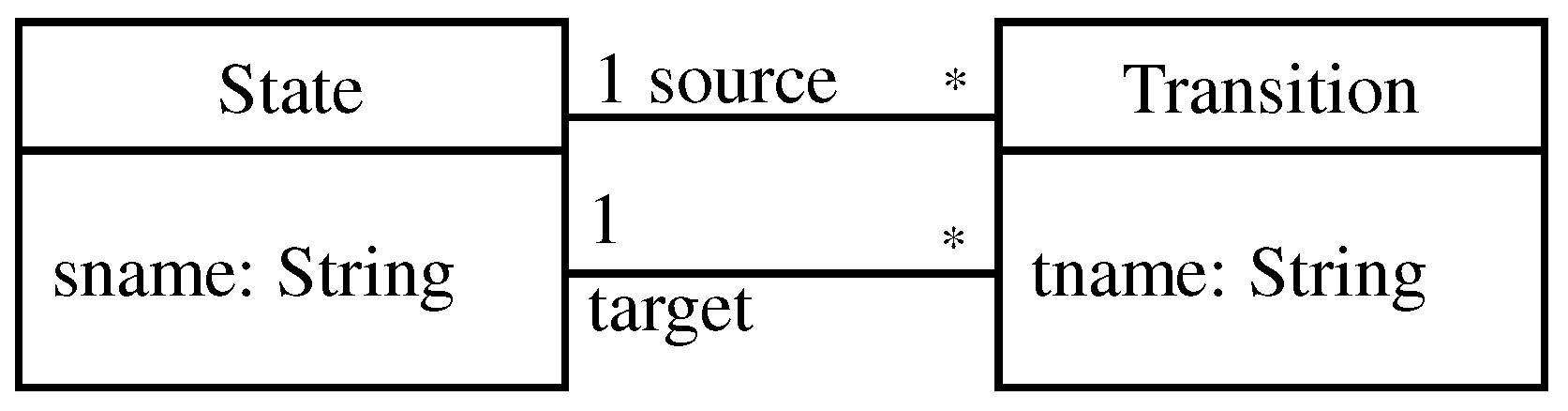
Definition 3. Type graph (metamodel): A type graph TG is a distinguished graph, where TG = (NTG, ETG, srcTG, tgtTG), and NTG and ETG are types of nodes and edges, respectively.
Definition 4. Typed graph (model): A typed graph is a triple Gtyped = (G, type, TG) such that G is a graph (Definition 1) and type: G → TG is a graph morphism (Definition 2) called the typing morphism. The typed graph Gtyped is called an instance (graph) of (the graph) TG, and we denote the set of all instance graphs of TG as Inst[TG].
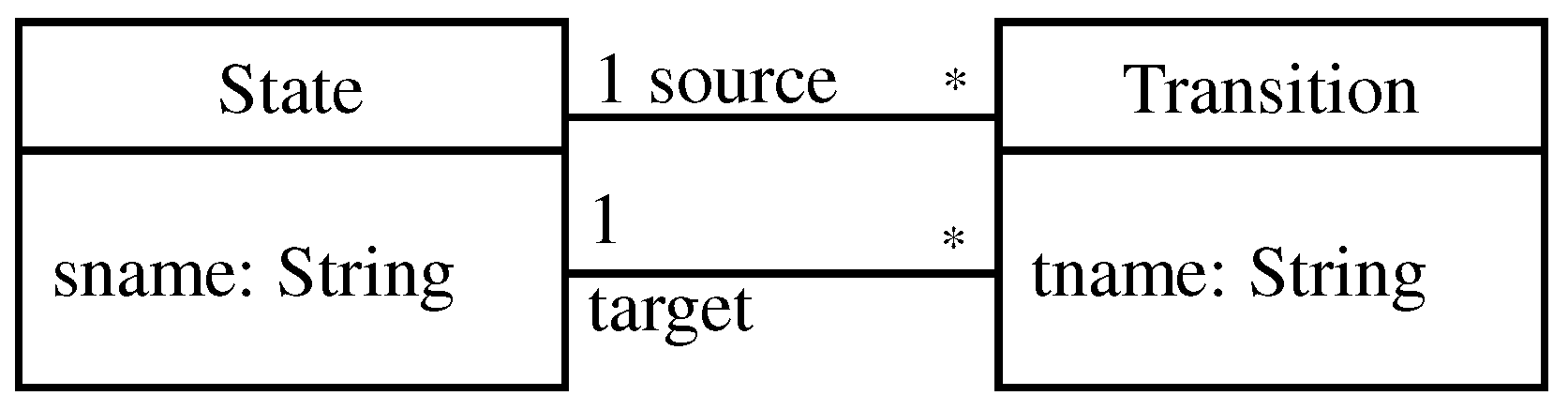
Figure 6b shows an example of a typed graph typed over the type graph to its left (
Figure 6a). The type graph in
Figure 6a represents the types of nodes and edges. There are two types of nodes here, namely, State and Transition, and two types of association edges, namely, source and target. Node names and types in the typed graph are depicted inside the nodes as name: type. For instance, in the node labeled with S1: State, S1 is the name of a node and State is the type of that node. For the edges, names and types of edges are represented in the same way.
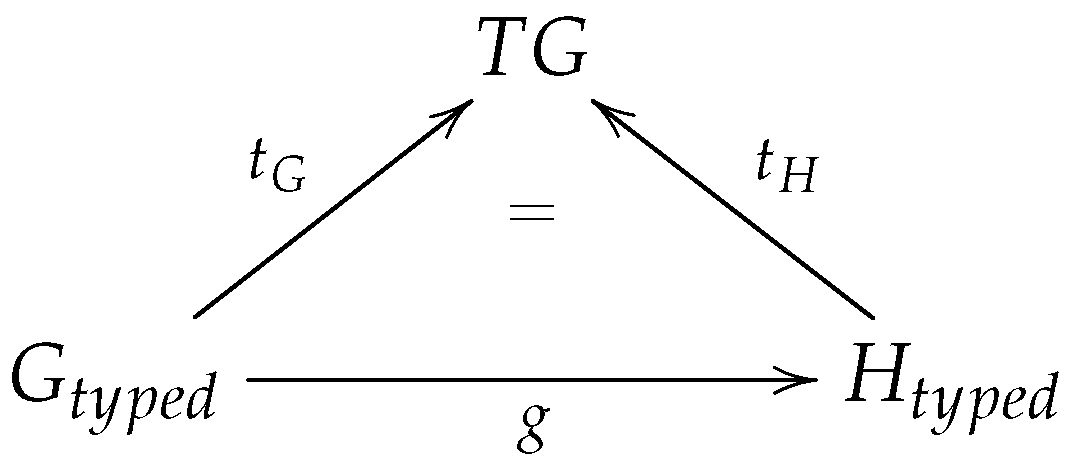
Definition 5. Typed graph morphism: Given a type graph TG, and two typed graphs Gtyped and Htyped (typed over TG), a typed graph morphism g: (Gtyped, tG: Gtyped → TG) → (Htyped, tH: Htyped TG) is a graph morphism g: Gtyped → Htyped that also preserves typing, i.e., g ∘ tH = tG, as illustrated in Figure 7. 3.2. Attributed Type(d) Graphs as E-Graphs
Given a typed graph (i.e., a model), it is useful in practice to attach additional information to nodes and edges by
attributing them, such that each node and/or edge can contain zero or more attributes. In this case, we refer to
typed attributed graphs, where attributes are typically a
name:value pair that allows to attach a specific value to each attribute name. In addition, given a typed attributed graph that is typed over some
TG (i.e., a metamodel), that
TG needs to constrain the names and types of attributes that are allowed for certain types of nodes and edges. In this context, we refer to an
Attributed Type Graph (ATG), as shown in
Figure 8, which extends the type graph illustrated in
Figure 6a with node attributes.
As an example of a typed attributed graph, reconsider the typed graph in
Figure 6b extended with attributes as in
Figure 9, where nodes have attributes with names tname, sname.
In this paper, we adopt the definition of Ehrig et al. [
22]
for E-graphs to represent ATGs (note that from now on in this paper, the concept of ATG implicitly means an attributed type graph that is represented as an E-graph), which allows attribution for both nodes and edges, where attributes of nodes (resp. edges) are represented as
special edges between graph nodes (resp. graph edges) and data nodes that represent the data types of these attributes.
Figure 10 visualizes the concept of E-graphs.
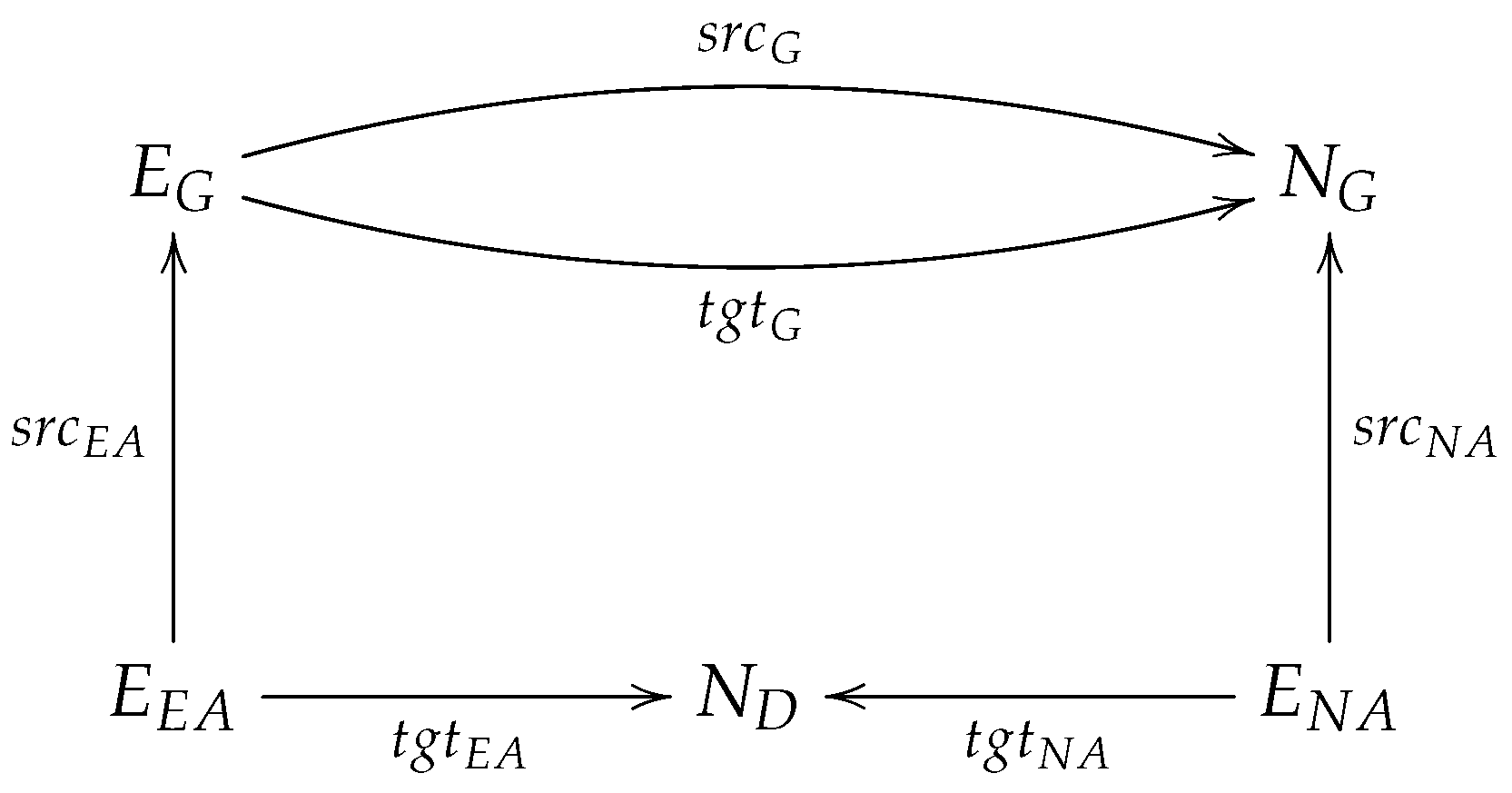
Definition 6. E-graph: An E-graph is a tuple EG = (NG, ND, EG, ENA, EEA, (srcj, tgtj) j ∈ {G, NA, EA}) where:
NG and ND are graph nodes and data nodes, respectively;
EG, ENA, and EEA are graph edges, node attribute edges, and edge attribute edges, respectively;
srcj and tgtj, where j G, NA, EA} are source and target functions that assign to each of the three categories of edges (i.e., EG, ENA, and EEA) a source and a target, as follows:
- –
srcG: EG → NG, tgtG: EG → NG for graph edges;
- –
srcNA: ENA → NG, tgtNA: ENA → ND for node attribute edges;
- –
srcEA: EEA → EG, tgtEA: EEA → ND for edge attribute edges.
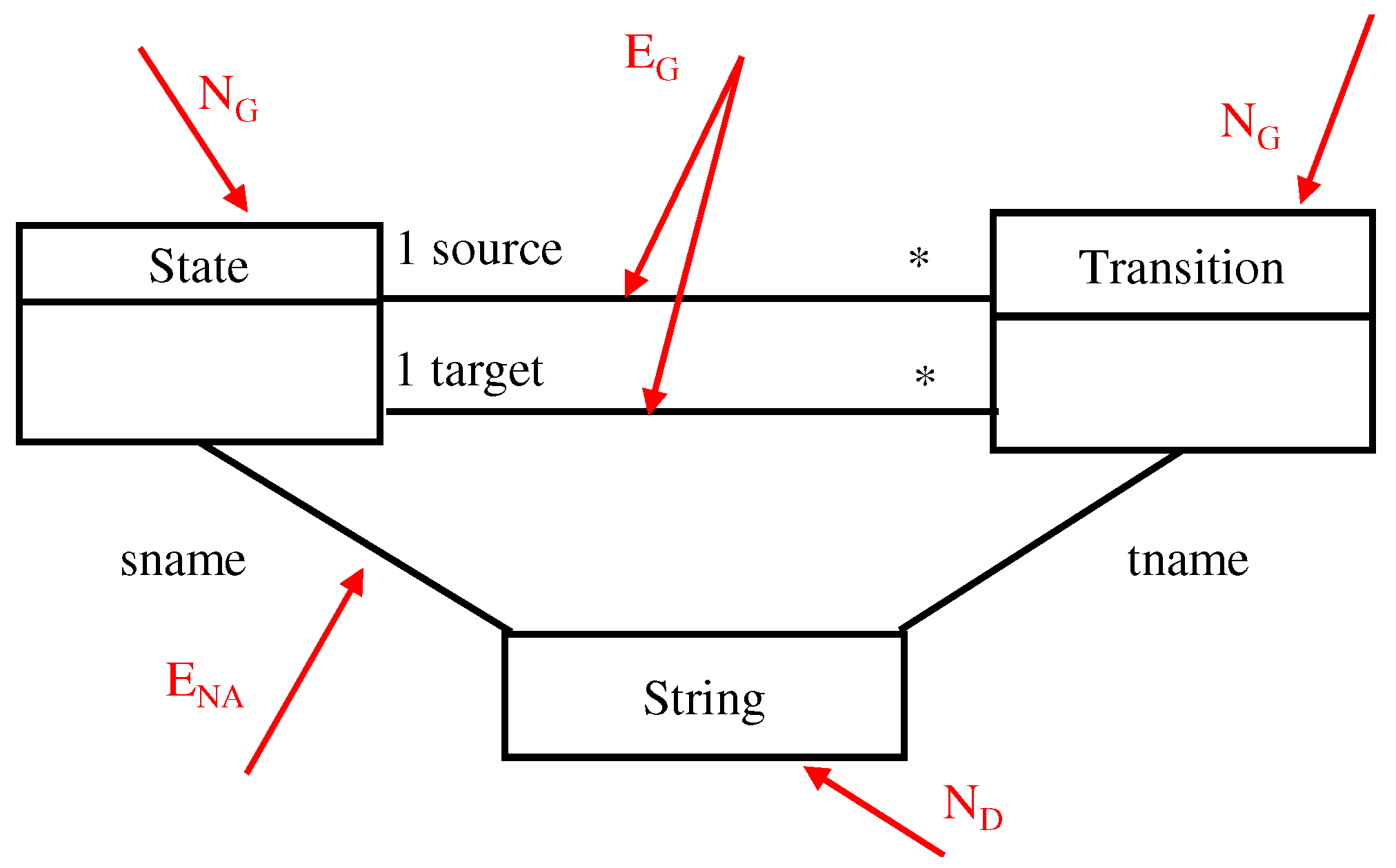
Example: The ATG in
Figure 8 is represented as the E-graph illustrated in
Figure 11. The figure shows the different categories of nodes and edges defined in Definition 6, namely:
Graph nodes (NG): State, Transition
Data nodes (ND): String
Graph edges (EG): source, target
Node attribute edges (ENA): sname, tname
Figure 11.
An E-Graph, EG, with node attributes represented as edges. The star (*) indicates that zero or more instances of the class “Transition” are associated with one instance of the class “State”.
Figure 11.
An E-Graph, EG, with node attributes represented as edges. The star (*) indicates that zero or more instances of the class “Transition” are associated with one instance of the class “State”.
In addition, attributes of nodes are represented as special edges between graph nodes and data nodes that represent the type that attributes. For example, the attribute tname is represented as an edge between graph node Transition and the data node String.
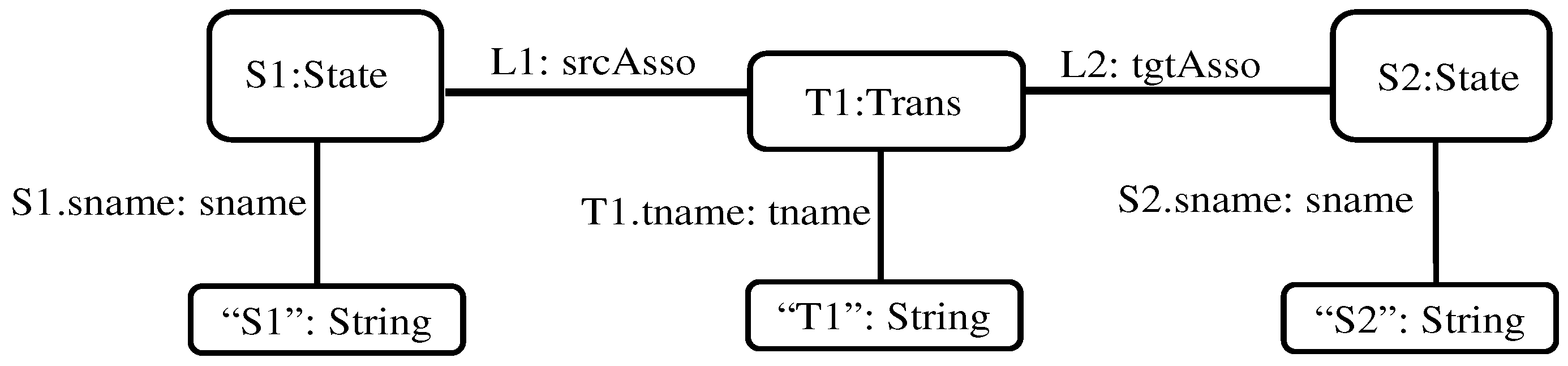
An instance typed graph ITG (i.e., model) of the attributed E-graph EG in
Figure 11 is illustrated in
Figure 12, where this figure is a representation of the typed attributed graph found in
Figure 9. We use the notation Inst[EG] to denote the set of all graphs conforming to EG; hence, ITG ∈ Inst[EG].
3.3. Formalization of Model Families and Union Models
In this paper, we consider model families that consist of an arbitrary set of homogeneous models that conform to the same metamodel. In that sense, we can define a model family as a set of typed attributed graphs that are instances of the same attributed type graph, ATG, and satisfy the constraints of that type graph.
Definition 7. Model Family: A model family is a tuple MF = ({Gtyped}, type, ATG), where each Gtyped ∈ {Gtyped} is in Inst[ATG] and type: {Gtyped ATG.
Definition 8. Union Model (): Let MF be a model family with two models such that MF = ({G1, G2}, type, ATG), where type: G1, G2 → ATG (represented as an E-Graph) and where:
G1 = (NG1, ND_G1, EG1, ENA_G1, EEA_G1, (srcj,tgtj), where j ∈ {G, NA, EA}, typeG1)
G2 = (NG2, ND_G2, EG2, ENA_G2, EEA_G2, (srcj,tgtj), where j ∈ {G, NA, EA}, typeG2)
In addition, G1 and G2 satisfy the following conditions:
Cond. 1: If two nodes have the same name and the same type, then these nodes are considered identical. Note that we assume that each node and each edge has its own unique identifier; for simplicity, we express this identity by means of a unique name.
Cond. 2: If two edges have the same name and the same type and if they connect between the same source and target nodes, these edges are considered identical.
If the above conditions are satisfied, then the union model that represents MF is a model = G1 ⊔∐ G2 = (NU, EU, srcU, tgtU, typeU) such that NU = (NG1 ∪ NG2 ∪ ND_G1 ∪ ND_G2), EU = (EG1 ∪ EG2 ∪ ENA_G1 ∪ ENA_G2 ∪ EEA_G1 ∪ EEA_G2), and the functions srcU, tgtU, and typeU are: Provided that conditions Cond. 1 and Cond. 2 in Definition 6 are respected, the union operation can be generalized into an of arbitrary size. That is, given , its union model is .
The union operation is incremental. That is, given a union model already constructed for a particular family, any upcoming model added to that family is unified incrementally with such that the new union model becomes . The annotations of and are unified as well, which is discussed in the next section. Consequently, the incremental nature of the union operation allows for the merging of two or more individual models, a model and a union model, or two union models.
It is important to mention here that even if the typed graphs used to construct models are well-formed, there is no guarantee that their union
will be a well-formed model. In fact,
will conform to the
typing constraints imposed by the
ATG, and may not conform to other constraints such as multiplicities of attributes and/or association ends, or to other external OCL constraints. This metamodel-level issue is discussed in more detail in [
10].
4. Spatio-Temporal Annotation Language (STAL)
With an appropriate formalization of model families (as discussed in
Section 3), the challenging part of constructing a union model is not necessarily in the union operation itself. Rather, the challenge is in being able to distinguish the models to which a particular element belongs. For example, in the goal model family shown in
Figure 1, we need to distinguish that Fence rule 3 belongs only to aerodromes of TYPE 1 (i.e., configuration 1), Fence rule 2 belongs only to TYPE 2, etc. In addition, if there are common elements among all models (such as ACS rule 2) we need to indicate this in
in a precise and exploitable manner.
To achieve this, we propose a Spatio-Temporal Annotation Language (STAL) to annotate elements of each individual model with information about their versions and/or configurations in the form of <vernum, confinfo>, where vernum denotes the version number (time dimension) of a particular model (e.g., 1st version, 2nd version, etc.), while confinfo denotes space dimension-related information (e.g., organization type, size, location).
In the time dimension, models can evolve independently and asynchronously over distinct timepoints. Because timepoints can be correlated and compared, they naturally form a chronological order. Considering this inherent chronological nature of models evolution, a sequence of versions of a particular model can be annotated with sequential version numbers: ver1, ver2, … vern. This creates an implicit temporal validity between model versions; for instance, we can say that ver1 happened before ver2. The timing information embedded in the <vernum> format in STAL can represent version numbers or dates, a hierarchical version numbering scheme (e.g., versions 2.3.1 and 4.3.2, etc.), or ranges thereof.
The space dimension, on the other hand, is different and somewhat more complex. This stems from the fact that the space dimension is flat and has neither a chronological order nor a hierarchical nature (except in very specific domains, such as in provinces and their cities). In STAL, we usually use the naming conventions confA, confB, …, confZ instead of conf1, conf2, …, confn to reflect the lack of ordering semantics. If a configuration is simple, we use its syntactical description as a name for that configuration. For example, confA=“airports in Ontario” and confB=“airports in Quebec” are the names of the two different configurations of airports.
However, it is worth mentioning that information about configurations can be composite, i.e., it may consist of several pieces of information. For example, TYPE1 aerodromes may refer to those airports that are of medium-size, located in Ontario, and with national flights only. To represent this type of composite information in STAL in a way that keeps annotated models as simple as possible, we propose the use of look-up tables, and approach that provides mappings between configuration names and their real descriptions. Please note that, in this example, the numbering suffixes of TYPEs do not hold any ordering meanings; they are only descriptions of the configuration.
Table 1 shows an example of a look-up table for the configurations in
Figure 1.
In addition, in a model family it is possible that one model element belongs to several or all family members; see the full STAL grammar in
Appendix A. For instance, assume that there is a model family with one model configuration (confA) that evolves into five versions (i.e., ver
1 to ver
5). Moreover, assume a node
n that belongs to the five versions of that model. In this case,
n will typically be annotated in the union model with five annotations: <ver
1, confA>, <ver
2, confA>, <ver
3, confA>, <ver
4, confA>, <ver
5, confA>. Such a style may lead to large amounts of annotations per element. To
simplify annotations of union models, the representation of STAL annotations can be shortened such that a sequence of version annotations is represented as a range of values ([start:end]). In the above example, the annotation of
n becomes <[ver
1: ver
5], confA>. Ranges are, however, unavailable for configurations, as they are usually not sortable.
In the same example, it could happen that an element, say, edge e, appears in all versions from ver1 to ver8 except in ver4. In this scenario, a set of ranges can be used such that e is annotated with <{[ver1: ver3], [ver5:ver8]}, confA>. Furthermore, if an element x belongs to ver1 to ver3 of confA and to versions ver1 to ver4 of confB, then that element will be annotated as <[ver1:ver3], (confA, confB)>; <ver4, confB>. Finally, if an element belongs to all versions and/or all configurations of a family, we annotate it with the keyword ALL.
The ranging mechanism used with versions may be applicable to configurations as well if their nature allows for continuous or discrete ranging, such as TYPE1, TYPE2, etc. However, to avoid confusion between versions and configurations we do not use ranges to annotate configurations in this paper. Rather, we use a comma-separated list to indicate a set of configurations, e.g., <(confA, confB, confD)>.
5. Propositional Encoding Language with Annotations (PELA)
To facilitate reasoning about models and to realize a simple graph union in practice, we encode typed graphs (i.e., models) as logical propositions. Such encoding provides a concrete syntax for defining models and metamodels. To encode a model
m into propositional logic, we need to first map elements in
m into propositional variables and then join them. To achieve this, we propose a
propositional encoding language with annotations (PELA), which defines specific naming conventions for the propositional encoding of variables, where propositions themselves are annotated with STAL (see
Section 4). While defining the syntax of PELA, we took into consideration that this language should be reversible, that is, a modeler should be able to retrieve (or decode) a model back from its propositional encoding. This operation, however, is not supported by the tools in this paper; such tool support, albeit not difficult to implement, is left for future work.
5.1. Definitions
The propositional encoding of models using PELA is defined as follows:
Definition 9. ElementToPropositionWithAnnotation: Given a model M = (G, type, ATG), where G = (NG, ND, EG, ENA, (srcj, tgtj), j ∈ {G, NA, EA}) (see Definition 6), together with a STAL annotation specifying version numbers and configuration information, the mapping of elements of M into propositions with annotation ElementToPropositionWithAnnotation(elem) is defined according the following syntactical rules (along with their semantics):
A graph node of type is mapped into a propositional variable “t–<vernum, confinfo>” to express the semantics: “a model (with vernum and confinfo) contains a node n of type t”. Formally: n–t iff ∃n ∈ NG ∧ type(n) = t.
A graph edge of type with source node x and target node y is mapped into a propositional variable “e–x–y–t–<vernum, confinfo>” to express the semantics: “a model (with vernum and confinfo) contains an edge e of type t from node x to node y”. Formally: e–x–y–t iff ∃e ∈ EG ∧ type(e) = t ∧ srcG(e) = x ∧ tgtG(e) = y.
A data node dn ∈ ND of type t ∈ dataType owned by a graph node n ∈ NG is mapped into a propositional variable “dn–n–t–<vernum, confinfo>” to express the semantics: “a model (with vernum and confinfo) contains a node n that owns a data node dn of type t”. Formally: dn–n–t iff ∃n ∈ NG ∧ owner(dn) = n ∧ type(dn) = t.
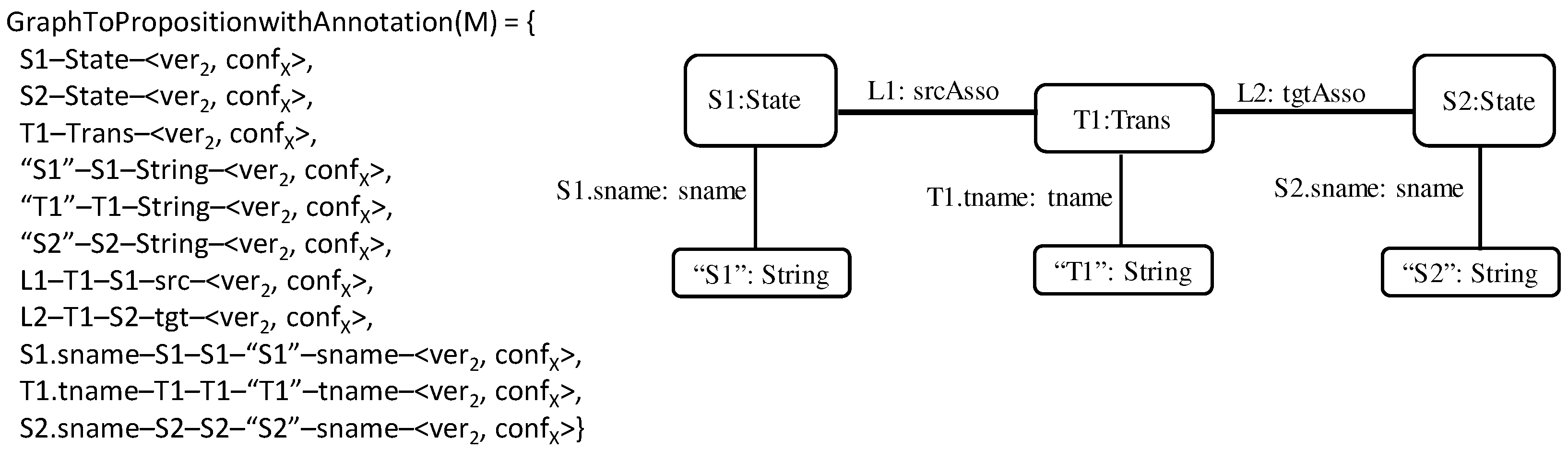
A node attribute edge nae ∈ ENA of type t ∈ attribute_name that is represented as a special edge between a graph node n ∈ NG and a data node dn ∈ ND, where n is also the owner of that attribute, is mapped into a propositional variable “nae–n–n–dn–t–<vernum, confinfo>” to express the semantics: “a model (with vernum and confinfo) contains a node n which owns an attribute nae of type t, and this nae is represented as an edge from graph node n to data node dn”. Formally: nae–n–n–dn–t iff ∃nae ∈ ENA ∧ owner(nae) = n ∧ type(nae) = t ∧ src(nae) = n ∧ tgt(nae) = dn. It is worth clarifying that the “n–n” part in the pattern nae–n–n–dn–t represents the same element n. The first n indicates the owner of the attribute, and the second n indicates that this owner is also a source of the edge. We use this syntax to distinguish the node attribute edge as a special edge distinct from the ordinary graph edge.
For example, if model M in
Figure 12 is the second version of an initial model, say, M
0, and represents configuration X, then the propositional encoding of state S1 in that model is
S1–State–<ver2, confX> and the propositional encoding of a node attribute edge S1.sname is
S1.sname–S1–S1–“S1”–name–<ver2, confX>.
It is important to emphasize here that model M could be a union model rather than an individual model. According to Definition 8, because a union model is a model, the propositional encoding rules discussed above should be applicable to MU, with the exception that the annotations of MU elements are expressed as full STAL annotations instead of single model annotations. This means that the four rules stated in Definition 9 preserve their syntax and semantics when applied to MU, except that the annotation format changes from single vernums and single confinfo into ranges, sets, or lists of vernum and lists of confinfo.
Based on Definition 9, we can now define the mapping of an entire graph to propositions (with annotations), as follows:
Definition 10. GraphToPropositionWithAnnotation: Given a typed graph G, a mapping of G’s elements into a set of propositions is GraphToPropositionWithAnnotation(G) = {ElementToPropositionWithAnnotation(elem)|elem ∈ NG ∪ ND ∪ EG ∪ ENA ∪ EEA}.
For example, the propositional encoding of the model in
Figure 12 (repeated here for convenience) is shown to the left of
Figure 13. We assume that the model here represents the second version of a given initial model and represents configuration X; that is, each of its elements is annotated with
<ver2, confX>.
5.2. Union of Propositional Encodings of Models
Given the propositional encoding of models discussed in the previous section, the union operation simply becomes the union of the propositional encodings of individual models, as follows:
Definition 11. Proposition Encoding Union (PEU): Let MF be a model family of two models G1 and G2 (Definition 8), where G1 and G2 are attributed typed graphs with the same metamodel ATG, and let GraphToPropositionWithAnnotation(G1) and GraphToPropositionWithAnnotation(G2) be their propositional encodings (Definition 10); then, the union of the propositional encodings with annotations G1 and G2 is: PEU = GraphToPropositionWithAnnotation(G1) ∪ GraphToPropositionWithAnnotation(G2).
We can generalize the above definition to a set of arbitrary encoded models, where the union of the propositionally encoded models is annotated according to the grammar of STAL following the approach in
Section 4. Furthermore, because the union operation is incremental, a proposition encoding union (PE
U) can be unified with other individual models or even with other PE
Us. For instance, given a
PEU of a set of propositionally encoded models and a new model
Mi encoded as
GraphToPropositionWithAnnotation(Mi), their union becomes
PEUnew = PEU ∪ PEMi. The annotations of
PEU and
Mi are unified according to STAL.
5.3. Example
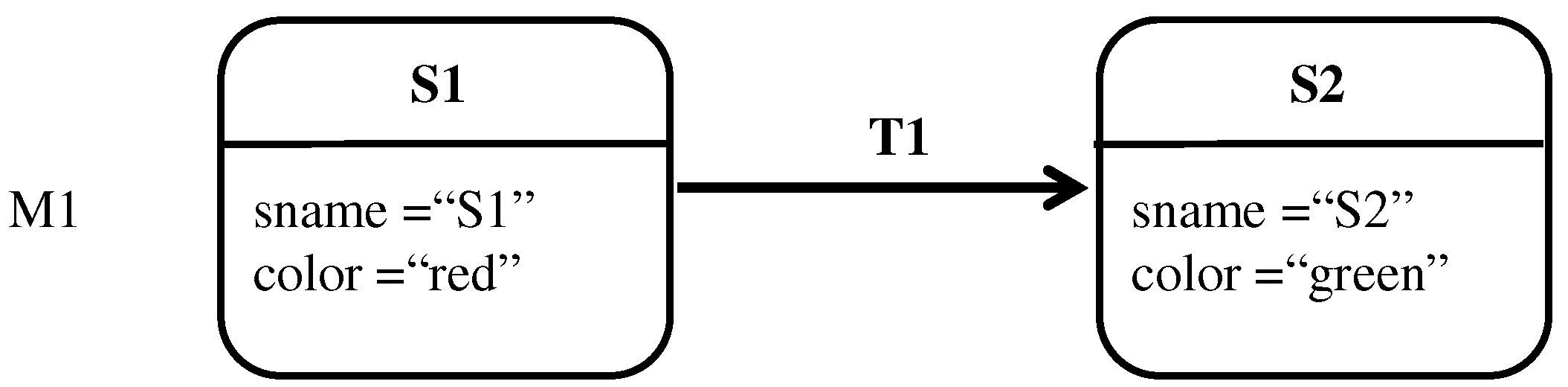
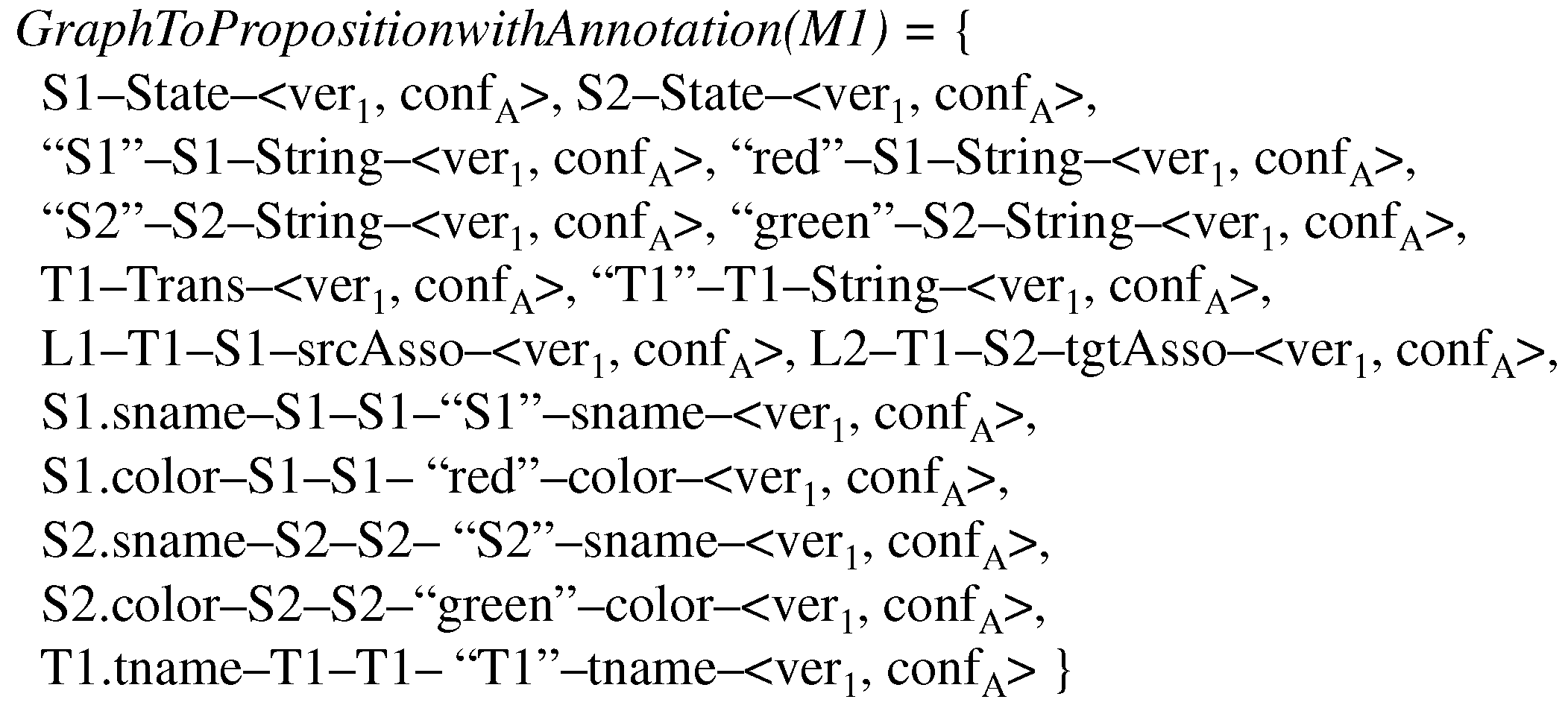
This section provides a simple yet complete example for two versions of state transition diagrams, M1 and M2. The example illustrates the formalization of both models as E-graphs. In addition, it illustrates their encoding into propositional variables as well as their union. In this example, M1 and M2 are assumed to be the first and the second version of a model that together represent configuration A. Hence, the elements of M1 and M2 are respectively annotated with <ver1, confA> and <ver2, confA>.
Figure 14 represents
M1 in the conventional representation of state transition diagrams,
Figure 15 illustrates the representation of
M1 as a canonical typed attributed E-graph, and
Figure 16 represents
M1’s propositional encoding.
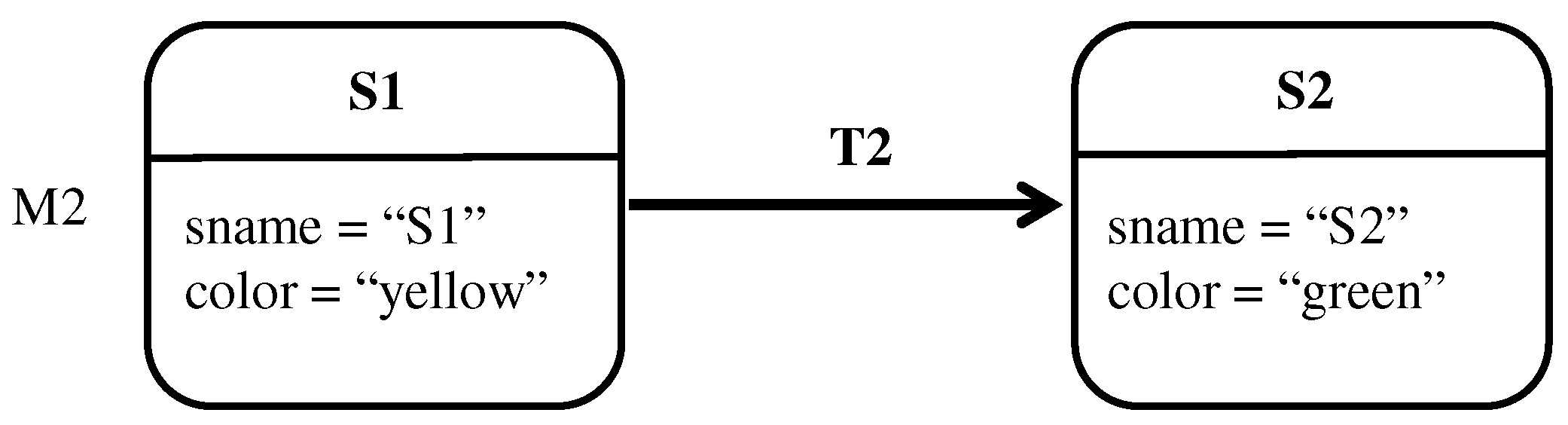
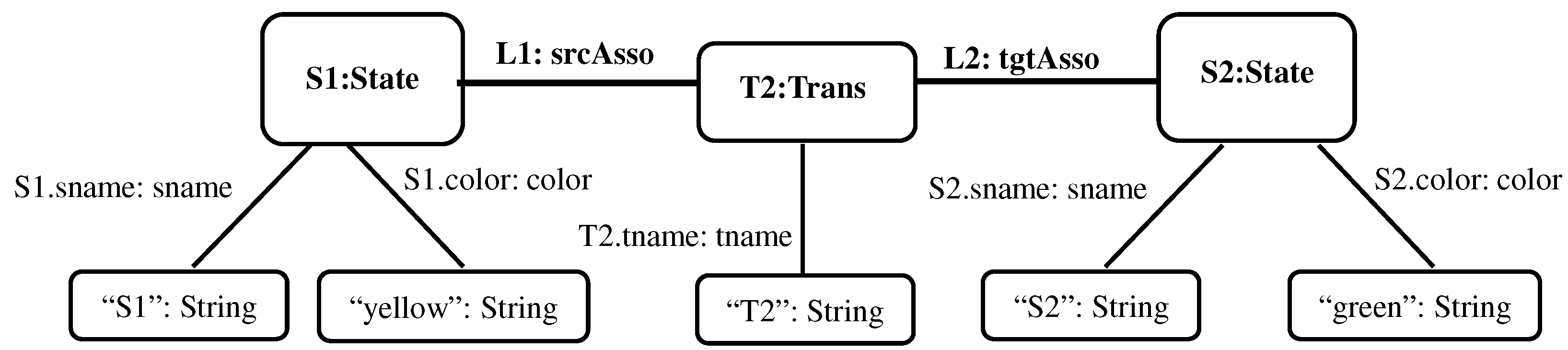
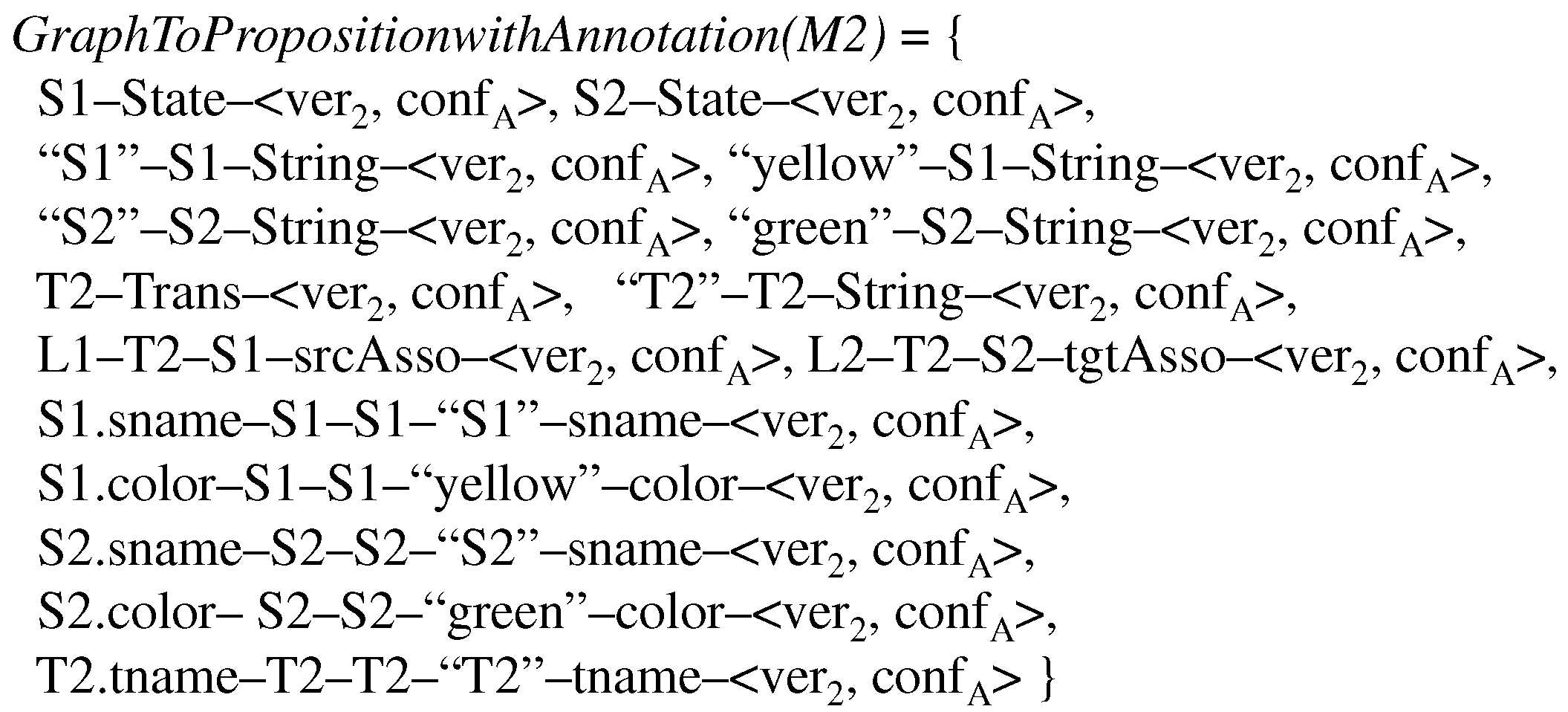
In the same manner,
Figure 17 shows the conventional representation of
M2 as a state transition diagram,
Figure 18 represents it as an E-graph, and
Figure 19 details its propositional encoding.
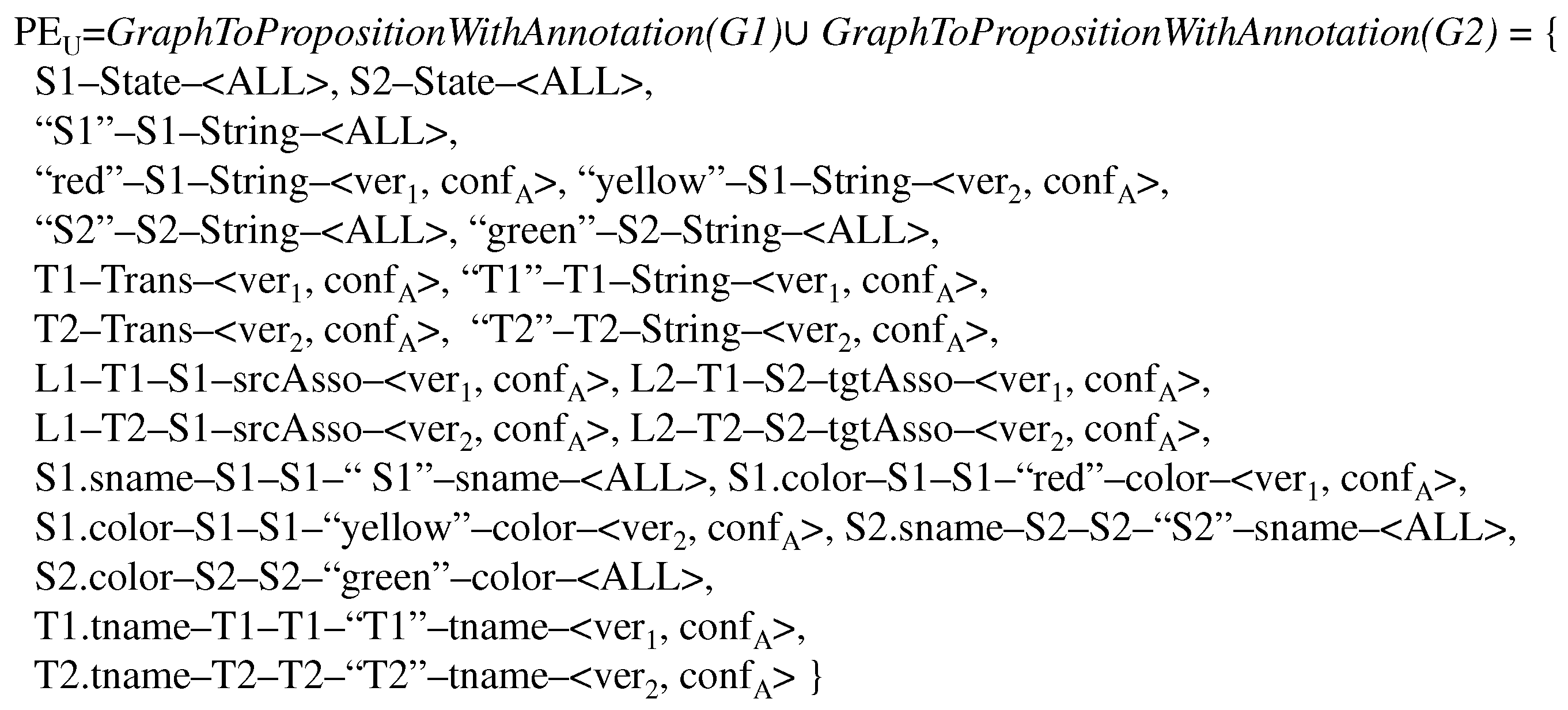
After encoding
M1 and
M2, we can now construct their union model
as the union of their propositional encodings with annotations (Definition 11), as shown in
Figure 20:
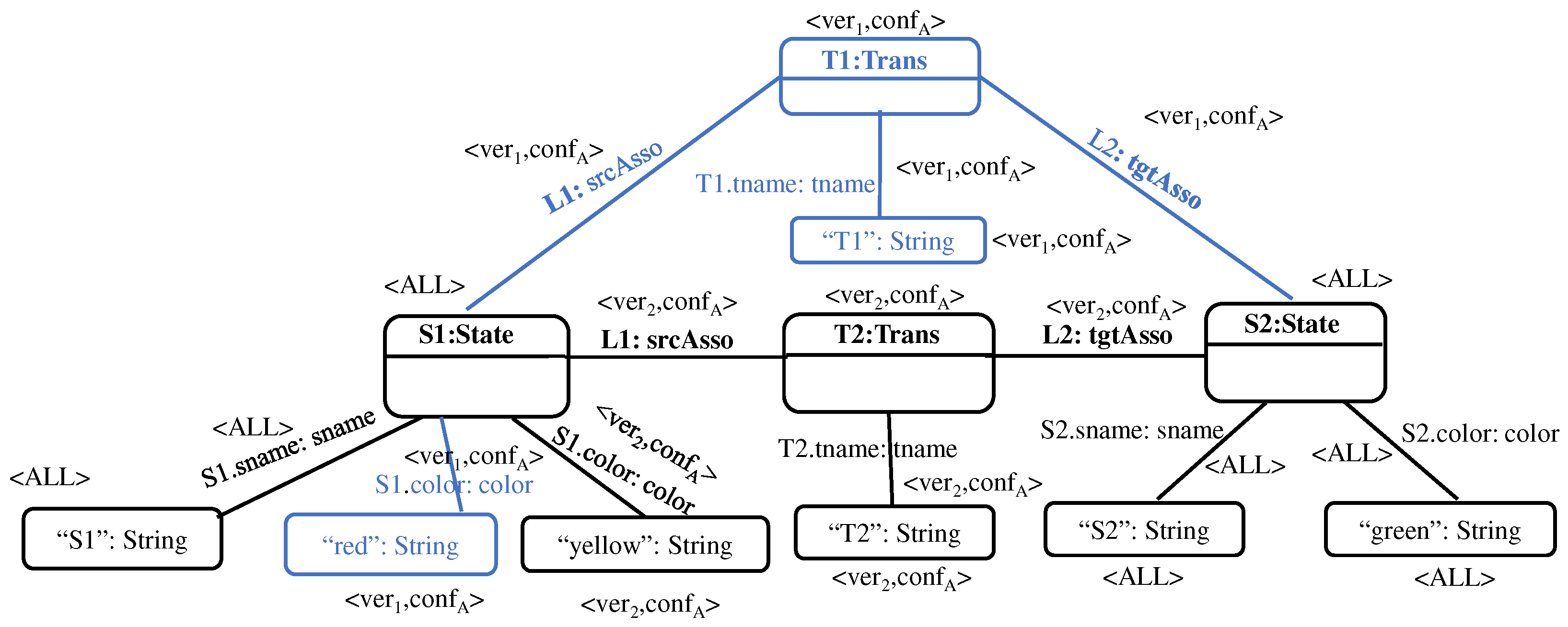
The representation of the union model as an E-graph is depicted (with annotations) in
Figure 21, and its conventional representation as an ordinary state transition diagram (again with annotations) is shown
Figure 22.
7. Results and Discussion
The results of the three reasoning tasks defined earlier are reported in
Section 7.1,
Section 7.2 and
Section 7.3.
Section 7.4 highlights the potential threats to validity. Finally,
Section 7.5 provides a summary and a discussion of important points related to the current results and means of improving them in the future.
7.1. Results for Property Checking (RT1)
This section reports on our empirical results for the property checking reasoning task.
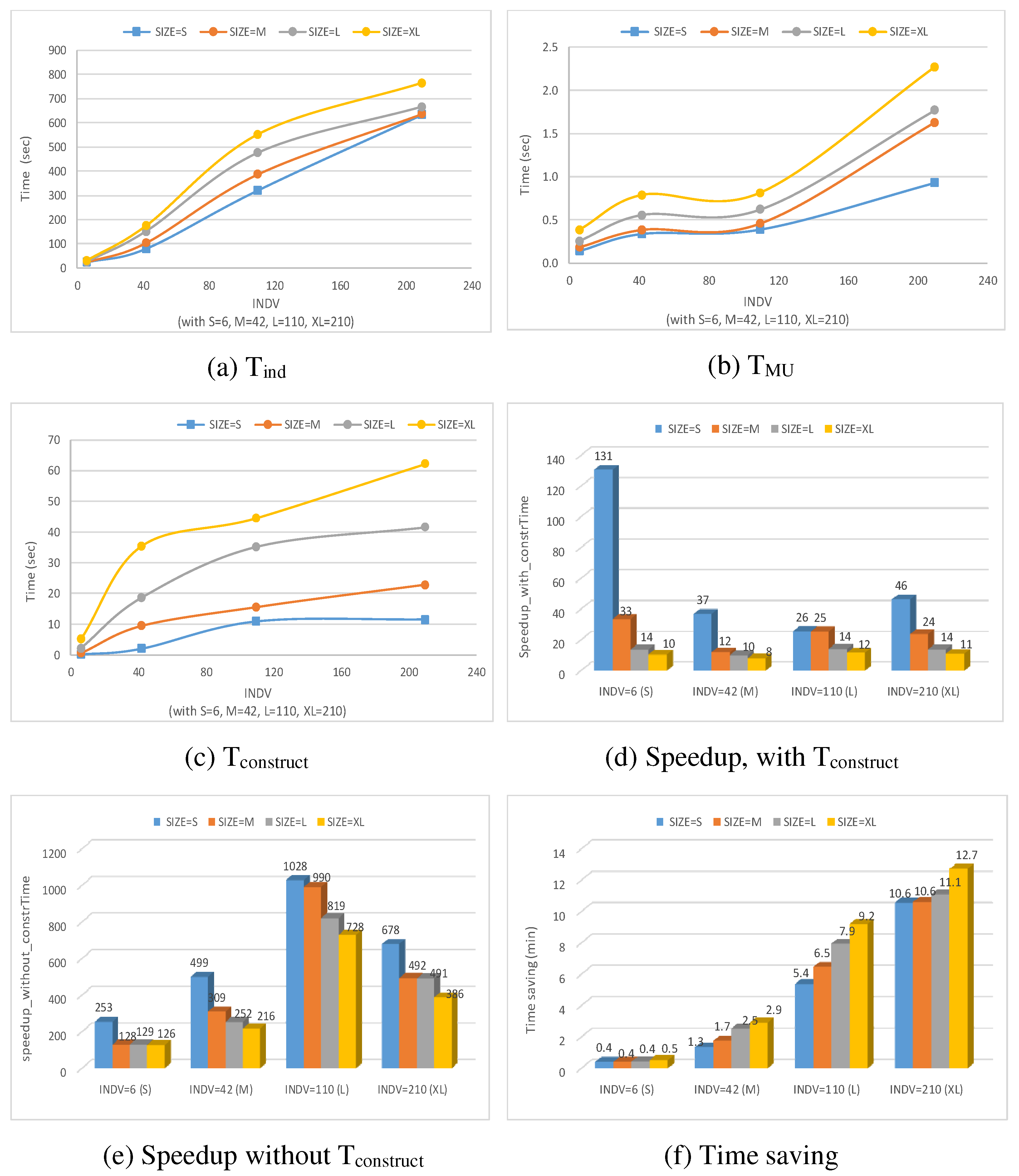
Figure 25a illustrates T
ind, which is the total time performing property checking on each individual model, for all
SIZE and
INDV categories.
Figure 25b reports on T
MU, which is the time needed to perform property checking on union models that capture individual models of different
SIZE and
INDV. In addition,
Figure 25c shows the time T
construct needed to construct these union models.
Figure 25d shows the time speedup with T
construct, i.e.,
speedup_with_constrTime = Tind /(
Tconstruct + TMU), while
Figure 25e shows the speedup without considering T
construct, calculated as
speedup_without_constrTime =
Tind/TMU. Finally,
Figure 25f highlights the time saving in minutes achieved by using
to perform property checking calculated as
TimeSaving = (
Tind − TMU).
Figure 25a–c shows that T
ind, T
MU, and T
construct increase when the size of models (i.e.,
SIZE) or the number of models in a family (i.e.,
INDV) increase. In addition, it can be noticed that the increase of T
ind is important for each
SIZE category, as the
INDV parameter grows from
INDV = S to
INDV = XL. For instance, with
SIZE = XL, we observe 30.85 s on average for
INDV = S to 765 s on average for
INDV=XL. On the other hand, the increase of T
MU as
INDV grows is marginal for each
SIZE category. For example, for XL-sized models T
MU increases from 0.39 s (for
INDV = S) to 2.25 s (for
INDV = XL).
Furthermore, it can be inferred from
Figure 25d,e that the use of
for property checking achieves a noticeable time speedup compared to performing the same task on a set of individual models separately. For
speedup_with_constrTime (
Figure 25d), the highest speedup (=131) was observed with a small number of individual models (i.e.,
INDV = S) that are of a small size (i.e.,
SIZE = S). The smallest speedup (=8) was observed when
INDV = M and
SIZE = XL. In addition,
Figure 25d shows that there is a noticeable pattern of speedup degradation for each
INDV category as the number of elements per individual model (i.e.,
SIZE) increases. This is due in part to the increase of T
construct as the
SIZE increases. Nevertheless, the speedup never falls below 1, which means that even with very large models (with
INDV = XL and
SIZE = XL) the time to perform property checking on a group of such models (using
), considering the time to construct
, is better than performing property checking on all individual models.
Figure 25e shows that the time speedup becomes more significant when T
construct is ignored, where the highest
speedup_without_constrTim = 1028 is with models of
SIZE = S and
INDV = L. This high value of 1028, which is higher than the number of models in family (110), is caused in part because of a low denominator value with low resolution (e.g., 1028 = 308.4/0.3), as well as by the time taken by the Python environment to load before executing the code of each individual model, which is not negligible, particularly for small models.
It is important to emphasize here that the erratic behavior of the time speedup with and without Tconstruct across all categories of SIZE and INDV does not necessarily mean that one category is superior to the other. This is because speedup reflects the ratio between Tind and TMU (and Tconstruct in case of calculating speedup_with_constrTime), and could fluctuate because of different densities of variability in the models.
It is not necessary that the speedup with INDV = S should be always better than that of INDV = M, INDV = L, etc., or vice versa, as the topology of the models generated may influence efficiency and this aspect is not controlled in this experiment. To this end, the speedup metric is used in this paper to demonstrate the improvements achieved by using in general, without regarding of the particular behavior of this improvement.
The
TimeSaving metric, however, can be relied on to observe the behavior of the time gained from using
to perform a particular task as opposed to using individual models multiple times.
Figure 25f clearly illustrates a consistent pattern of time savings that increases when
SIZE and
INDV increase, which is the result that we were hoping for.
7.2. Results for Trend Analysis (RT2)
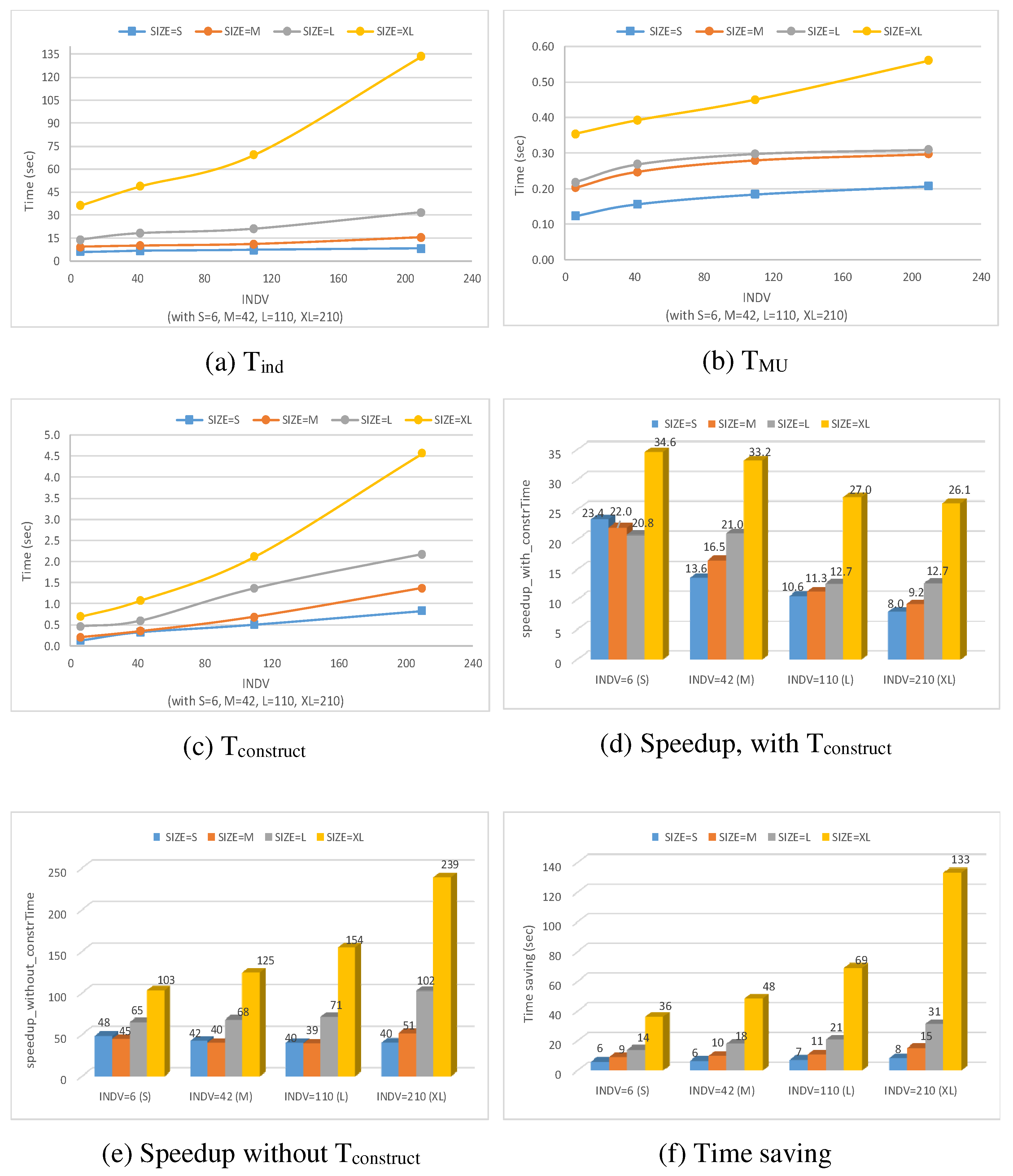
In this experiment, a trend analysis is conducted on an element named X-Goal from a set of individual GRL models and their union model . The purpose of this analysis is to study the trend of this goal’s importance value attribute and analyze how this value changes over time. Performing this analysis on implies retrieving an element named X of type Goal, annotated with any version number <versions>, which could be a single version, a set of versions, or a range of versions that the element may belong to. With individual models, the search for and retrieval of X-Goal involve each individual model, where the laborious process in practice would involve opening each individual model, searching the desired element, observing its importance value, and closing the current model.
Figure 26a–c shows the respective T
ind, T
MU, and T
construct utilised in this experiment, while
Figure 26d–f illustrates the time speedups, with and without T
construct and the time saved. The results in
Figure 26a–c clearly illustrate a linear increase of T
ind, T
MU, and T
construct as
SIZE or
INDV increases. This is to be expected, as the searching task, which is the core of trend analysis, has a linear time complexity.
From
Figure 26d, it can be noticed that for one
SIZE category,
SIZE = XL, the speedup decreases with the increase of the number of individual models in a family, i.e.,
INDV. This decrease is mainly due to the consideration of T
construct while computing the speedup. Nevertheless, the achieved speedups with T
construct are very positive and important. Without considering T
construct the speedup becomes more substantial, with a generally increasing pattern as
INDV or
SIZE increases, as depicted in
Figure 26e.
Finally,
Figure 26f demonstrates that the use of
reduces the time needed to search for elements that belong to a group of models compared to traversing each individual model separately. This is clearly illustrated by the time savings, which substantially increase when
SIZE or
INDV increases.
7.3. Results for Commonality Analysis (RT3)
Figure 27 shows the results of conducting commonality analysis on a set of GRL models and their
. This experiment required searching for all elements that are common between all model versions. This is a tedious task, especially when the number/size of models increases. Searching a set of
M individual models with
N elements each to find elements in common between all models has a complexity of
. However, with
we only use one model to search for elements in common, where the task here is to search for elements annotated with <
ALL>.
It can be noticed from
Figure 27a that T
ind in this experiment is at least two times larger than T
ind in the previous experiment (i.e., RT2). T
MU and T
construct, on the other hand, grow at the same pace. Again, times T
ind, T
MU, and T
construct increase as
SIZE or
INDV increases.
The time speedup achieved by using
is always positive, regardless of whether or not T
construct is considered.
Figure 27d illustrates that
speedup_with_constrTime shows a pattern close to that in RT2, that is, for one
SIZE category, e.g.,
SIZE = S or
SIZE = M, the speedup decreases as
INDV increases. On the other hand,
speedup_without_constrTime is more substantial, and increases as
INDV or
SIZE increases, as shown in
Figure 27e. Finally, the time savings in this experiment (
Figure 27f) are more significant than in the experiments for RT2, as the potential gain here is quadratic rather than linear, with about 133 s saved for extra-large families of extra-large models.
7.4. Threats to Validity
One major threat to the validity of our empirical evaluation stems from relying on randomly generated inputs, both graphs and experimental parameters. This threat can be alleviated by using more realistic parameters, e.g., using real-world model families.
Another threat is related to the experimental parameters, where we used only SIZE and INDV. We recognize that we need to examine the impact of the variability of models on reasoning. For example, we could consider the number of different annotations per element to describe how similar or different the members are. The topology of the graphs (e.g., depth, number of linked nodes, etc.) could benefit from specific experiments. The complexity of a property to be checked might be another parameter to consider.
Our experiments need to be elaborated further for more complex properties and analysis types, some of which might not exploit the STAL annotations as the ones used here could, and should be compared to other approaches that handle variability in the time dimension alone for goal models, including the work of Aprajita et al. [
28] and that of Grubb and Chechik [
29]. Furthermore, the current validation covers two modeling language, goal models and state machines, and should be extended to other types that are more structural, e.g., class diagrams, or behavioral, e.g., process models. Finally, the usefulness of our approach needs to be assessed and demonstrated with more significant examples or real-world case studies and a better quantitative comparison with existing approaches where there are overlapping analysis functionalities.
7.5. Summary and Discussion
Thus far, this paper has explored a research question related to the performance of union models by empirically evaluating the efficiency of reasoning and analysis tasks for modeling families using union models in comparison to the use of individual models. We defined three general reasoning tasks and evaluated their performance, first using union models and then using individual models several times. We have discussed the experimental methodology, setup, and implementation and reported on the empirical results. Our experiments demonstrate the usefulness and performance gains of union models for analyzing a family of models all at once compared to individual models. Finally, we have identified several threats to validity as caveats.
The speedups, whether the time for constructing the union model is considered or not, are always in favor of the union model, and these speedups generally increase as models or families grow larger. However, there is erratic behavior regarding the increase of the time speedup. For instance, the speedup for L-sized models in certain experiments was larger than the speedup of M-sized models, while in other experiments it was smaller than that for M-sized models. This behavior is due in part to the possibility of having a footprint for the creation of , which is not negligible. Moreover, in order for the behavior of the speedup to be more stable and less erratic, we may need to consider additional experimental parameters such as the ratio of variability across models and the topology of the models at hand.
In addition, it is worthwhile to mention here that in certain individual experiments related to the calculation of speedup_with_constrTime we encountered counter-intuitive results, specifically, where the speedup was less than one. In such experiments, a speedup value less than one suggests that the use of , when taking its construction time into account, is slower than the use of individual models. Again, these slowdowns where obtained in individual experiments only, and they were amortized by calculating the average results of fifteen runs.
In terms of concrete time saved, which ranges from half a second to a few minutes depending on the experiment, the savings may not seem large at first glance; however, there are several practical implications:
The time savings accumulate as many analyses are performed on a same union model, especially as the union model construction time is amortized over multiple analyses;
The savings doe not take into account the concrete time required when a practitioner uses a tool to open a model, perform the analysis, and save the results, which this may take many seconds per model and is prone to human error;
The savings become essential in a context where union model construction and verification are offered as a service, i.e., as an online application where multiple users can concurrently upload, merge, and analyze their model families.
While this paper focuses on analysis types that are language
independent, the first author’s previous work in [
10,
30] explored the adaptation or
lifting of language-
dependent analyses for a given language, namely, forward and backward propagation of satisfaction values for GRL model families, again with positive performance gains. The GRL-based analysis algorithms and their lifted version were implemented using an optimizer (IBM CPLEX) with speedups up to 23 times faster when using the union model compared to individual models, and for a much lower additional memory cost. In practical terms, this means that analysis on model families is no longer limited to the verification of behavioral properties often seen in existing approaches.
In addition, while conducting property checking our focus was not on the type of properties to be checked (i.e., semantic vs. syntactic properties); rather, the focus was on examining the improvement of performance in terms of time speedup for performing any kind of property checking (syntactic in this paper) when using union models once as compared to performing the same task using many models in the model family one model at a time. In the future, it would be possible to differentiate between the types of properties to be checked and assess the impact of the property type on the overall performance of the analysis.
8. Related Work
In the literature, few approaches have been proposed to support model families. Shamsaei et al. [
9] used GRL to define a generic goal model family for various types of organizations in the legal compliance domain. They annotated models with information about organization types to specify which were applicable to which family members. Different from our work, the work of [
9] handled only variation of models in the space dimension, and did not consider evolution over time. In addition, the authors focused only on maintainability issues and did not propose union models to improve analysis complexity and reduce analysis effort. Palmieri et al. [
8] elaborated further on the work of [
9] to support more variable regulations. The authors integrated GRL and feature models to handle regulatory goal model families as software product lines (SPLs) by annotating a goal model with propositional formula related to features in a feature model. Unlike [
9], Palmieri et al. considered further dimensions such as the organization size, type, the number of people, etc. However, they did not consider the evolution of goal models over time, and did not introduce union models.
Our work has strong conceptual resemblances with the domain of SPL engineering, which aims to manage software variants in order to efficiently handle families of software [
31,
32]. The notion of a feature is central to variability modeling in SPL [
33], where features are expressed as variability points. Feature models (FMs) [
16] are a formalism commonly used to model variability in terms of optional, mandatory, and exclusive features organized in a rooted hierarchy and associated with constraints over features. FMs can be encoded as propositional formula defined over a set of Boolean variables, with each variable corresponding to a feature. FMs are deemed to be very useful to represent feature dependencies, describe precisely allowed variability between products in a product line, and guide feature selection to allow for the construction of specific products [
34,
35]. However, it is important to emphasize here that FM is different from our proposed union models
in both usage and formalism. The differences between both artifacts can be summarized as follows:
A feature model represents variability at an abstract “feature level”, which is separate from software artifacts (such a grammar of possible configurations), whereas
represents the variability of all existing models at the “artifact level” itself [
36];
While a feature model defines all possible valid configurations of products along with constraints on their possible configurations, an provides a complete view of the solution space that makes it explicit for modelers which particular element belongs to which model without necessarily modeling dependencies or constraints between elements of one model or across several models of a family;
The purpose behind using both artifacts is different, in that FMs are mainly used to ensure that the derived individual models are valid through valid feature configurations, with the possibility of generating new models or products. On the other hand, is proposed to perform domain-specific analysis beyond configuration validation more efficiently on a group of existing models than on individual models;
Finally, an enables the extraction of individual members of a model family by means of selecting particular time and/or space annotations, while FM enables model extraction by means of selecting valid combination of dependency rules and cross-tree constraints between features.
There exist verification approaches that target many valid configurations of feature models [
37]. For instance, Classen et al. [
38] explored the use of model checking on a family of behavioral models captured by a feature model, with resulting gains in verification time. Similar approaches have been developed for real-time SPLs [
39], for symbolic model checking [
40], and for probabilistic model checking [
41], among others [
42]. These approaches are, however, limited to the space dimension (no evolution of models over time) and to behavioral properties, e.g., they cannot be used to reason about satisfaction propagation in a family of goal models, which is allowed by the usage of
[
30].
To express variability, annotative approaches are commonly used in the literature, such as in the work of Czarnecki and Antkiewicz [
34], in which variability points are represented as presence conditions. These conditions are propositional expressions over features. Annotations of features can be used as inputs to a variability realization mechanism in order to derive or create a concrete software system as variant of the SPL. Using a negative variability mechanism, annotative approaches define a so-called 150% model that superimposes all possible variations for the entire SPL. The 150% model is used to derive a particular variant, while other irrelevant parts are removed. While union models have similarities to 150% models, the uses of both models, the domains they are used in, and the ways of annotating them are all different.
Ananieva et al. [
43,
44,
45] proposed an approach for consistent view-based management of variability in space and time. In particular, the authors studied and identified concepts and operations of approaches and tools dealing with variability in space and time. Furthermore, the authors identified consistency preservation challenges related to view-based evolution of variable systems composed of heterogeneous artifacts and provided a technique for (semi-)automated detection and repair of variability-related inconsistencies.
Mahmood et al. [
46] presented an empirical assessment of annotative and compositional variability mechanisms for three popular types of models, namely, class diagrams, state machine diagrams, and activity diagrams. The authors provided recommendations to language and tools developers and discussed findings from a family of three experiments with 164 participants in total, in which they studied the impact of different variability mechanisms during model comprehension tasks. The authors recommended that annotative techniques lead to better developer performance and noted that the use of the compositional techniques correlates with impaired performance. In addition, for all the experiments it was found that annotative variability is preferred over compositional variability by a majority of the participants for all task types and in all model types.
The approaches proposed by Seidl et al. [
14], Ananieva et al. [
47], Michelon et al. [
48,
49], and Lity et al. [
15] are closely related to ours. In the context of SPL engineering, they considered variation of software families in both space and time, and explicitly annotated variability models with time and space information to distinguish between the different versions and variations of software artifacts.
Different from approaches for managing the variability and evolution, Wittler et al. [
50] have introduced a variability model for both software and hardware that captures variability in both space and time as well as the dependencies between loosely coupled software and hardware components. The authors refined the Unified Conceptual Model by introducing system generations to reflect the implicit dependencies between software and hardware components in product lines.
Even though the concept of a “family” is shared between our work and the SPL domain, the main difference is one of purpose and scope. At its core, SPL engineering is a software engineering methodology for systematic proactive reusability. The overarching concern is to strategically design, plan, and maintain a set of software artifacts according to points of functionality (features). Then, by exploiting commonalities between variants, engineers can efficiently derive or create software products with desirable features. It is not the goal of our work to plan for reusability or to derive new models or products. Characteristically, union models do not depend on modeling common functionalities in a feature model. Such a model is expressly created to facilitate proactive reusability, and is a central concept in SPLs.
Instead, we use union models to analyze families of existing models irrespective of their provenance or the intent for which they were constructed. As an object-oriented technology, union models generalize SPLs by decoupling family modeling from the particularities and exigencies of proactive reusability. Union models are a step towards a more basic and fundamental idea: the representation and analysis of families of models.
Famelis et al. [
6] proposed partial models to capture a set of possible alternative models with design-time uncertainty. The emphasis of this work was to create a methodology for the lifecycle of design-time uncertainty. This includes articulating modelers’ uncertainty about design decisions, maintaining this uncertainty, and supporting systematic decision-making via refinement [
51]. Dhaouadi et al. [
52] addressed the challenges of design-time uncertainty by proposing
DRUIDE (Design and Requirements Uncertainty Integrated Development Environment), a language and workflow for articulating design time uncertainty. DRUIDE provides modelers with the ability to explicitly articulate uncertainty and compose completely heterogeneous models by linking uncertainties. This work is related to decision-oriented Product Line Engineering (PLE) [
53], mainly as design uncertainty often involves modeling sets of design alternatives. Furthermore, DRUIDE is related to research on creating representations of sets of related models, which is in turn related to our work on model families. Compared to the work of Famelis et al. [
6] and Dhaouadi et al. [
52], the focus of our work is more fundamental, looking at efficient reasoning about model families by leveraging redundancies across members of the family. Naturally, the three approaches are complementary, and we are actively researching various synergies.
The use of a single model to represent multiple interrelated systems was proposed by Stünkel et al. [
54]. Similar to our approach, they used typed graphs to represent commonalities between models. The authors focused on interoperability, consistency specification, and consistency restoration, and did not consider the representation of modeling families or variability representation in space and time.
Aprajita et al. [
28,
55] extended the GRL metamodel to document explicit changes (additions/deletions) of elements to specific versions of a model. Although a model family can be captured, this approach is specific to one language and is currently incomplete in terms of the kinds of changes to versions that it can accommodate.
Grubb et al. [
56,
57] introduced the concept of
dynamic intentions into goal models to capture alternatives on multiple time scales. The authors proposed a tool-supported method for specifying changes in intention over time which uses simulations to ask a variety of “what-if” questions about models that evolve over time.
Hablutzel et al. [
58] investigated the problem of model merging for Tropos goal models. In particular, the authors proposed a formal approach to address the problem of automatically merging the attributes of intentions and actors in which both static models and models with timing information were considered. In their work, Hablutzel et al. looked at the initial creation of a goal model through merging, rather than tracking model evolution over space and time through a merged representation using union models.
9. Conclusions and Future Work
In this paper, we propose union models as a first-class generic artifact to capture and represent model families. The paper provides a graph theory-based formalization of model families and their union models. In particular, model families are formalized as a set of attributed typed graphs in which all models are typed over the same metamodel. Metamodels are formalized as attributed type graphs, whereas union models are formalized as the union of all graph elements in the set of typed attributed graphs which constitute a model family. Included in the union model are the graph elements annotated by the models they are occurring. The purpose of this formalization is to permit representation of model families and their union models independent of any modeling language used in the context of MBSE. In addition, we propose a Spatio-Temporal Annotation Language (STAL) to support the representation of variability in model families in both the space and time dimensions and to facilitate reasoning about union models.
We demonstrate how the properties of these formalisms can be used to support the construction of union models as well as to perform typical reasoning tasks, such as trend analysis and property checking, on union models. We empirically illustrate the potential of using union models to improve analysis and reasoning over a set of models all at once as opposed to analyzing single models separately one at a time. Positive results are observed even when the time taken to construct union models is taken into consideration; in practice, the construction time can be amortized over many analyses.
The artifacts related to this paper are available online. These include Excel files for attributed typed graphs defined according to the formalization provided in
Section 3. In addition, GRL model families generated for four SIZE categories (i.e., small, medium, large, X-large) for our experiments, and the Python programs used for the union algorithm, for generating models, and for measuring the reasoning tasks defined in
Section 6 are included. See
https://bit.ly/UnionModelsExtra, accessed on 8 February 2023.
For future work, there are many opportunities to follow up on several directions:
Studying the effects of variation and topology on reasoning techniques: it is necessary to describe how sensitive reasoning and analysis are to the degree of variation in a union model, as well as where this variation is located (topology). The degree of variation of an can be inferred from the number of annotations and the number of annotated elements that exist in a model family and are represented by that .
Improved tool support: although a prototype tool exists for creating union models, the software ecosystem could be greatly enhanced by providing conversion from metamodels (in EMF or MOF) to type graphs and from models to typed graphs expressed with PELA. Tools to better visualize annotated union models in the original language’s syntax whenever possible would be very useful. Support for more rigorous lifting analysis methods and editors would contribute to the practical adoption of the proposed approach.
Studying the usability of the approach: there is a need to assess which practitioners this approach is useful to and which parts require usability enhancements in order to improve adoption in industry, especially regarding automation. We envision offering merging and several types of reasoning as online services.
Exploration of further synergies with techniques for representing and managing design-time uncertainty using partial models [
51]. Specifically, we would like to adapt model transformation lifting to union models and to develop operators for managing union models across their lifecycle.






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}