
Set-Point Control of a Spatially Distributed Buck Converter


Abstract
1. Introduction
2. Physical Modeling
2.1. Classical Buck Converter
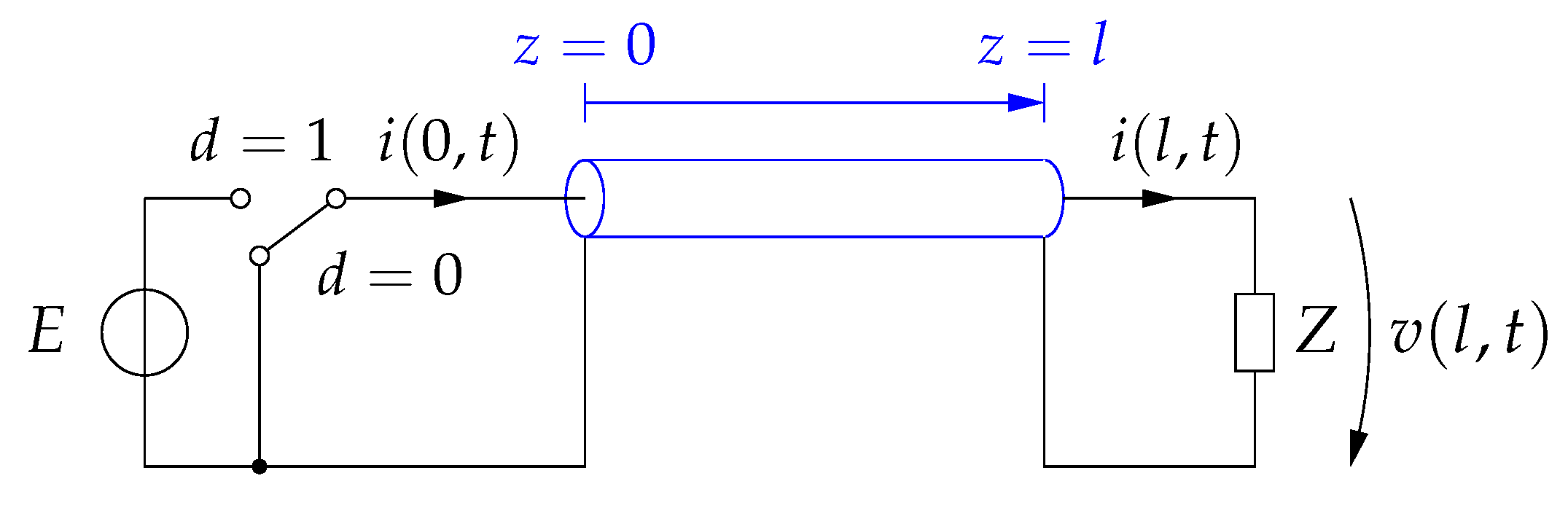
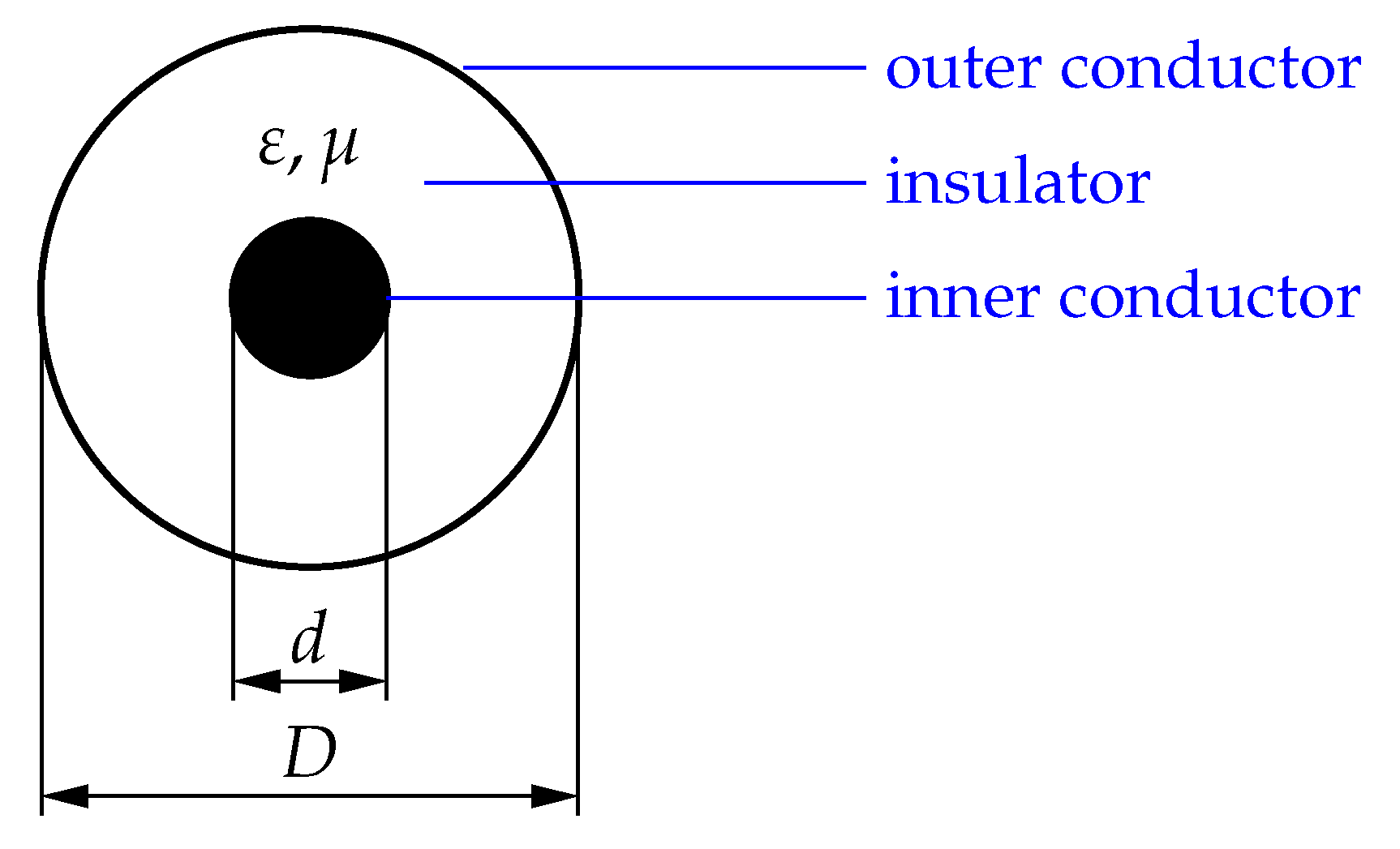
2.2. Distributed Buck Converter
3. Open-Loop Simulation
3.1. Simulation Setup
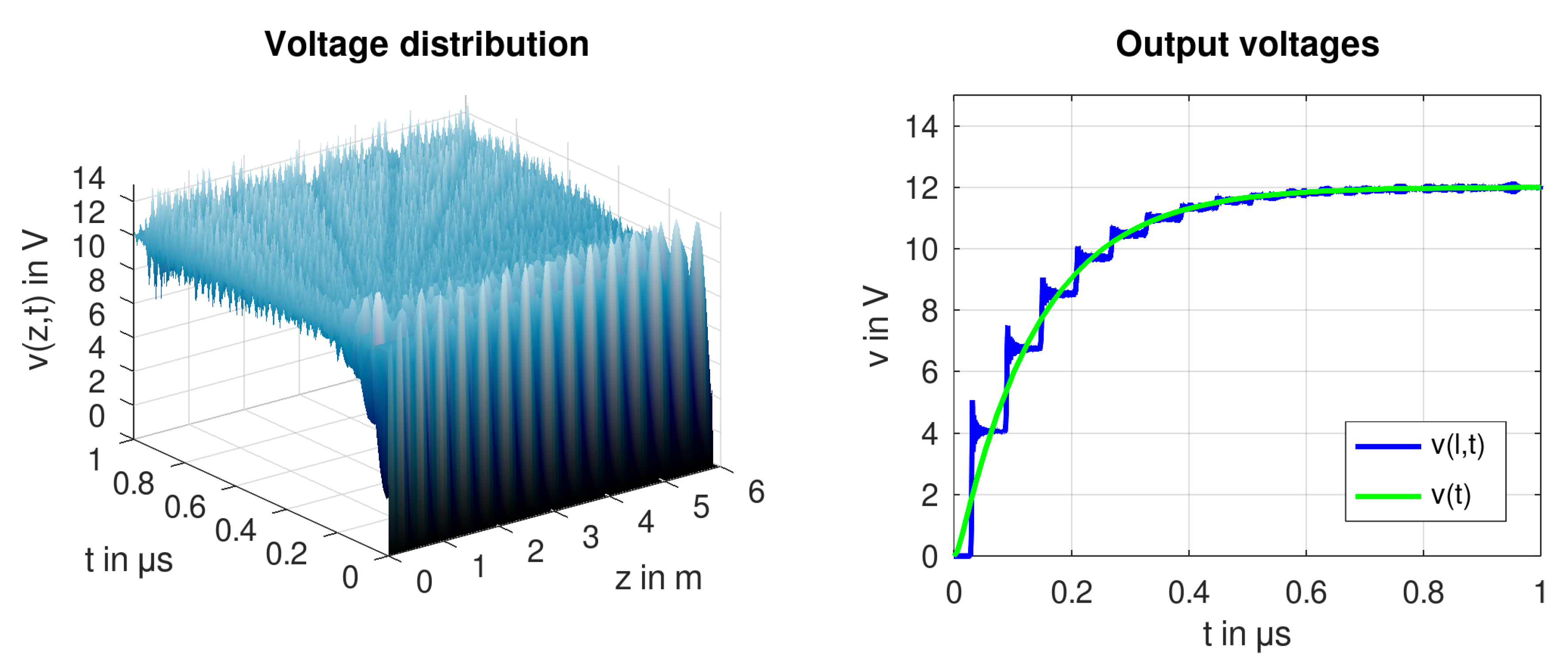
3.2. Transient Motion into the Steady-State
3.3. Transient Motion under Pulse-Width Modulation
4. Discrepancy-Based Control
- 1.
- ,
- 2.
- ,
- 3.
- For an arbitrary processthe real valued functionalis continuous with respect to t.
5. Closed-Loop Control of the Distributed Buck Converter
5.1. Continuous Control Mode
5.2. Discontinuous Control Mode
5.3. Implementation by Approximation
6. Discussion
7. Summary and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| ODE | Ordinary differential equation |
| PDE | Partial differential equation |
| PWM | Pulse-width modulation |
| MOL | Method of lines |
| MOSFET | metal-oxide-semiconductor field-effect transistor |
References
- Erickson, R.W.; Maksimovic, D. Fundamentals of Power Electronics; Springer Science & Business Media: Cham, Switzerland, 2007. [Google Scholar] [CrossRef]
- Bacha, S.; Munteanu, I.; Bratcu, A.I. Power Electronic Converters Modeling and Control; Springer: London, UK, 2014. [Google Scholar]
- Bose, B.K. Recent advances in power electronics. IEEE Trans. Power Electron. 1992, 7, 2–16. [Google Scholar] [CrossRef]
- Taghvaee, M.; Radzi, M.; Moosavain, S.; Hizam, H.; Marhaban, M.H. A current and future study on non-isolated DC–DC converters for photovoltaic applications. Renew. Sustain. Energy Rev. 2013, 17, 216–227. [Google Scholar] [CrossRef]
- Kumar, G.K.; Elangovan, D. Review on fault-diagnosis and fault-tolerance for DC–DC converters. IET Power Electron. 2020, 13, 1–13. [Google Scholar] [CrossRef]
- Levi, E.; Bodo, N.; Dordevic, O.; Jones, M. Recent advances in power electronic converter control for multiphase drive systems. In Proceedings of the 2013 IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Paris, France, 11–12 March 2013; pp. 158–167. [Google Scholar] [CrossRef]
- Bärnklau, H.; Gensior, A.; Rudolph, J. A Model-Based Control Scheme for Modular Multilevel Converters. IEEE Trans. Ind. Electron. 2013, 60, 5359–5375. [Google Scholar] [CrossRef]
- Huang, C.; Woittennek, F.; Röbenack, K. Steady-state analysis of a distributed model of the buck converter. In Proceedings of the European Conference on Circuit Theory and Design (ECCTD), Dresden, Germany, 8–12 September 2013; pp. 1–4. [Google Scholar] [CrossRef]
- Huang, C.; Woittennek, F.; Röbenack, K. Distributed parameter model of the buck converter with constant inductive load. IFAC-PapersOnLine 2015, 48, 691–692. [Google Scholar] [CrossRef]
- Della Torre, F.; Morando, A.P.; Todeschini, G. Three-phase distributed model of high-voltage windings to study internal steep-fronted surge propagation in a straightforward transformer. IEEE Trans. Power Deliv. 2008, 23, 2050–2057. [Google Scholar] [CrossRef]
- Röbenack, K.; Herrmann, R. Analysis, Simulation and Implementation of a Distributed Buck Converter. In Proceedings of the 26th International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 19–21 October 2022; pp. 213–218. [Google Scholar] [CrossRef]
- Wibben, J.; Harjani, R. A High-Efficiency DC–DC Converter Using 2 nH Integrated Inductors. IEEE J. Solid-State Circuits 2008, 43, 844–854. [Google Scholar] [CrossRef]
- Daafouz, J.; Tucsnak, M.; Valein, J. Nonlinear control of a coupled PDE/ODE system modeling a switched power converter with a transmission line. Syst. Control Lett. 2014, 70, 92–99. [Google Scholar] [CrossRef]
- Zainea, M.; van der Schaft, A.; Buisson, J. Stabilizing control for power converters connected to transmission lines. In Proceedings of the 2007 American Control Conference, New York, NY, USA, 11–13 July 2007; pp. 3476–3481. [Google Scholar] [CrossRef]
- Lupo, G.; Petrarca, C.; Vitelli, M.; Tucci, V. Multiconductor transmission line analysis of steep-front surges in machine windings. IEEE Trans. Dielectr. Electr. Insul. 2002, 9, 467–478. [Google Scholar] [CrossRef]
- Xie, Y.; Zhang, J.; Leonardi, F.; Munoz, A.R.; Degner, M.W.; Liang, F. Modeling and verification of electrical stress in inverter-driven electric machine windings. IEEE Trans. Ind. Appl. 2019, 55, 5818–5829. [Google Scholar] [CrossRef]
- Sira-Ramirez, H.; Ilic-Spong, M. Exact linearization in switched-mode DC-to-DC power converters. Int. J. Control 1989, 50, 511–524. [Google Scholar] [CrossRef]
- Gensior, A.; Woywode, O.; Rudolph, J.; Güldner, H. On Differential Flatness, Trajectory Planning, Observers, and Stabilization for DC-DC Converts. IEEE Trans. Circuits Syst. I 2006, 53, 2000–2010. [Google Scholar] [CrossRef]
- Sira-Ramírez, H. Sliding Mode Control: The Delta-Sigma Modulation Approach; Birkhäuser: Basel, Switzerland, 2015. [Google Scholar]
- Movchan, A.A. Stability of Processes with Respect To Two Metrics. J. Appl. Math. Mech. 1960, 24, 1506–1524. [Google Scholar] [CrossRef]
- Sirazetdinov, T.K. Stability of Systems with Distributed Parameters; Izdatel’stvo Nauka: Novosibirsk, USSR, 1987. (In Russian) [Google Scholar]
- Palis, S.; Kienle, A. Discrepancy Based Control of Particulate Processes. J. Process Control 2014, 24, 33–46. [Google Scholar] [CrossRef]
- Dimirovski, G.; Gough, N.; Barnettj, S. Categories in systems and control theory. Int. J. Syst. Sci. 1977, 8, 1081–1090. [Google Scholar] [CrossRef]
- Sira-Ramirez, H. A geometric approach to pulse-width modulated control in nonlinear dynamical systems. IEEE Trans. Autom. Control 1989, 34, 184–187. [Google Scholar] [CrossRef]
- Röbenack, K. Nichtlineare Regelungssysteme: Theorie und Anwendung der Exakten Linearisierung; Springer Vieweg: Berlin/Heidelberg, Germany, 2017. [Google Scholar] [CrossRef]
- King, W.P. Transmission Line Theory; Dover Publications, Inc.: New York, NY, USA, 1965. [Google Scholar]
- Mathis, W.; Reibiger, A. Küpfmüller Theoretische Elektrotechnik, 20th ed.; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar] [CrossRef]
- Deutscher, J.; Harkort, C. Parametric state feedback design of linear distributed-parameter systems. Int. J. Control 2009, 82, 1060–1069. [Google Scholar] [CrossRef]
- Sira-Ramírez, H.; Rios-Bolívar, M. Sliding Mode Control of dc-to-dc Power Converter via Extended Linearization. IEEE Trans. Circuits Syst. I 1994, 41, 652–661. [Google Scholar] [CrossRef]
- Zhou, K.; Doyle, J.C. Essentials of Robust Control; Prentice Hall: Upper Saddle River, NJ, USA, 1998. [Google Scholar]
- TimKabel. RG 58 C/U 50 Ω, Coaxial Cable. Available online: http://www.tim-kabel.hr/images/stories/katalog/datasheetHRV/1502_RG58_ENG.pdf (accessed on 6 December 2022).
- Hamdi, S.; Schiesser, W.E.; Griffiths, G.W. Method of lines. Scholarpedia 2007, 2, 2859. [Google Scholar] [CrossRef]
- Schiesser, W.E.; Griffiths, G.W. A Compendium of Partial Differential Equation Models: Method of Lines Analysis with Matlab; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar]
- Griffiths, G.; Schiesser, W.E. Traveling Wave Analysis of Partial Differential Equations: Numerical and Analytical Methods with MATLAB and Maple; Academic Press: Burlington, MA, USA, 2012. [Google Scholar]
- GNU Octave. Available online: http://www.gnu.org/software/octave/ (accessed on 6 December 2022).
- Shu, C.W. Essentially non-oscillatory and weighted essentially non-oscillatory schemes for hyperbolic conservation laws. In Proceedings of the Advanced Numerical Approximation of Nonlinear Hyperbolic Equations: Lectures Given at the 2nd Session of the Centro Internazionale Matematico Estivo (C.I.M.E.), Cetraro, Italy, 23–28 June 1997; Springer: Berlin/Heidelberg, Germany, 1998; pp. 325–432. [Google Scholar] [CrossRef]
- Banks, J.W.; Henshaw, W.D. Upwind schemes for the wave equation in second-order form. J. Comput. Phys. 2012, 231, 5854–5889. [Google Scholar] [CrossRef]
- Slotine, J.J.E.; Li, W. Applied Nonlinear Control; Prentice-Hall: Englewood Cliffs, NJ, USA, 1991. [Google Scholar]
- Otto, E.; Palis, S.; Kienle, A. Nonlinear Control of Continuous Fluidized Bed Spray Agglomeration Processes; SEMA SIMAI Springer Series; Springer International Publishing: Berlin/Heidelberg, Germany, 2020; pp. 73–87. [Google Scholar] [CrossRef]
- Shtessel, Y.; Edwards, C.; Fridman, L.; Levant, A. Sliding Mode and Observation; Birkhäuser: Basel, Switzerland, 2014. [Google Scholar]
- Harkort, C.; Deutscher, J. Finite-dimensional observer-based control of linear distributed parameter systems using cascaded output observers. Int. J. Control 2011, 84, 107–122. [Google Scholar] [CrossRef]
- Deutscher, J. Output regulation for linear distributed-parameter systems using finite-dimensional dual observers. Automatica 2011, 47, 2468–2473. [Google Scholar] [CrossRef]
- Gehring, N.; Stauch, C.; Rudolph, J. Parameter identification, fault detection and localization for an electrical transmission line. In Proceedings of the European Control Conference (ECC), Aalborg, Denmark, 29 June–1 July 2016; pp. 2090–2095. [Google Scholar] [CrossRef]
- Sagert, C.; Walter, M.; Sawodny, O. DC/DC converter control for voltage ripple reduction in electric vehicles. In Proceedings of the 2016 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Banff, AB, Canada, 12–15 July 2016; pp. 1442–1447. [Google Scholar] [CrossRef]
- Bärnklau, H.; Harnisch, M.; Proske, J. On medium frequency differential mode resonance effects in electric machines. IEEE Open J. Ind. Appl. 2021, 2, 310–319. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Röbenack, K.; Palis, S. Set-Point Control of a Spatially Distributed Buck Converter. Algorithms 2023, 16, 55. https://doi.org/10.3390/a16010055
Röbenack K, Palis S. Set-Point Control of a Spatially Distributed Buck Converter. Algorithms. 2023; 16(1):55. https://doi.org/10.3390/a16010055
Chicago/Turabian StyleRöbenack, Klaus, and Stefan Palis. 2023. "Set-Point Control of a Spatially Distributed Buck Converter" Algorithms 16, no. 1: 55. https://doi.org/10.3390/a16010055
APA StyleRöbenack, K., & Palis, S. (2023). Set-Point Control of a Spatially Distributed Buck Converter. Algorithms, 16(1), 55. https://doi.org/10.3390/a16010055