
Implicit A-Stable Peer Triplets for ODE Constrained Optimal Control Problems

Abstract
1. Introduction
2. Materials and Methods
2.1. The Boundary Value Problem
2.2. Error Analysis
2.2.1. Order Conditions
2.2.2. Bounds for the Global Error
2.2.3. Superconvergence of the Standard Method
2.2.4. Adjoint Order Conditions for General Matrices
2.3. Existence of Boundary Methods Imposes Restrictions on the Standard Method
2.3.1. Combined Conditions for the End Method
2.3.2. Combined Conditions for the Starting Method
2.4. Construction of Peer Triplets
2.4.1. Requirements for the Boundary Methods
2.4.2. -Stable Four-Stage Methods
2.4.3. A-Stable Methods
3. Results
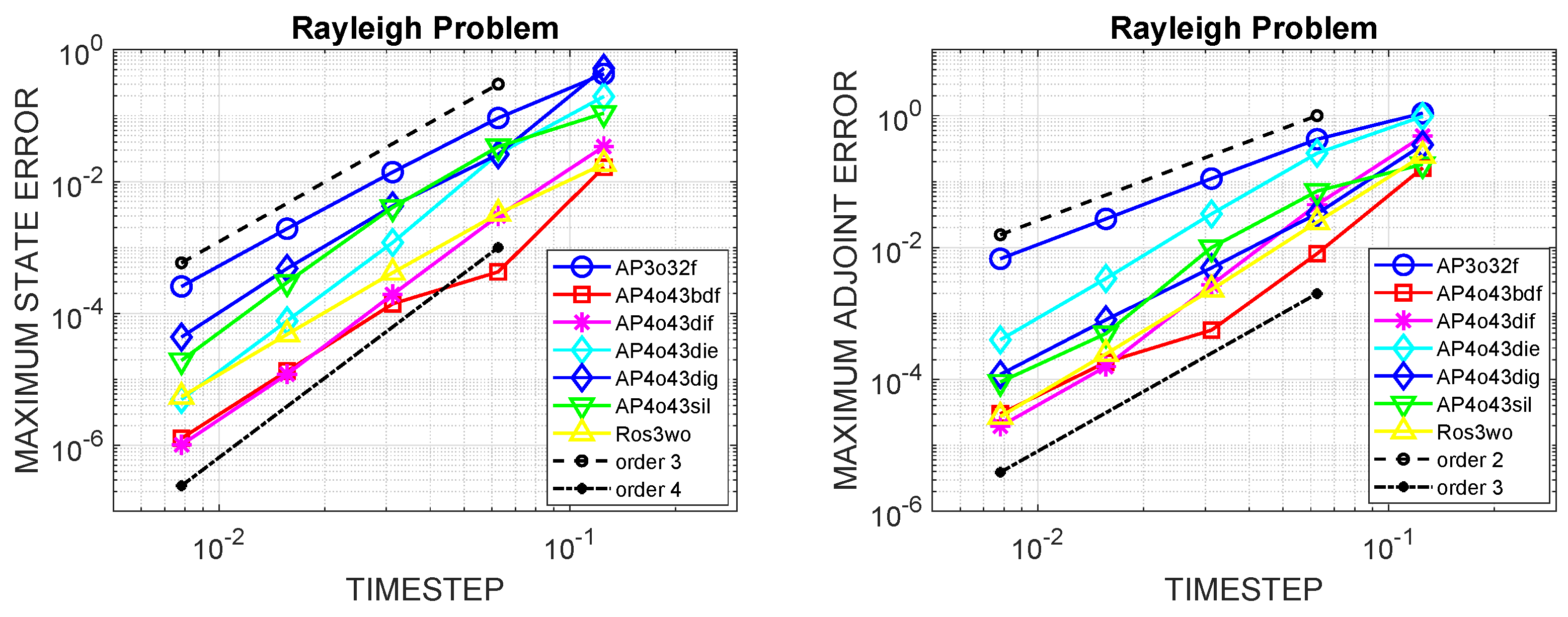
3.1. The Rayleigh Problem
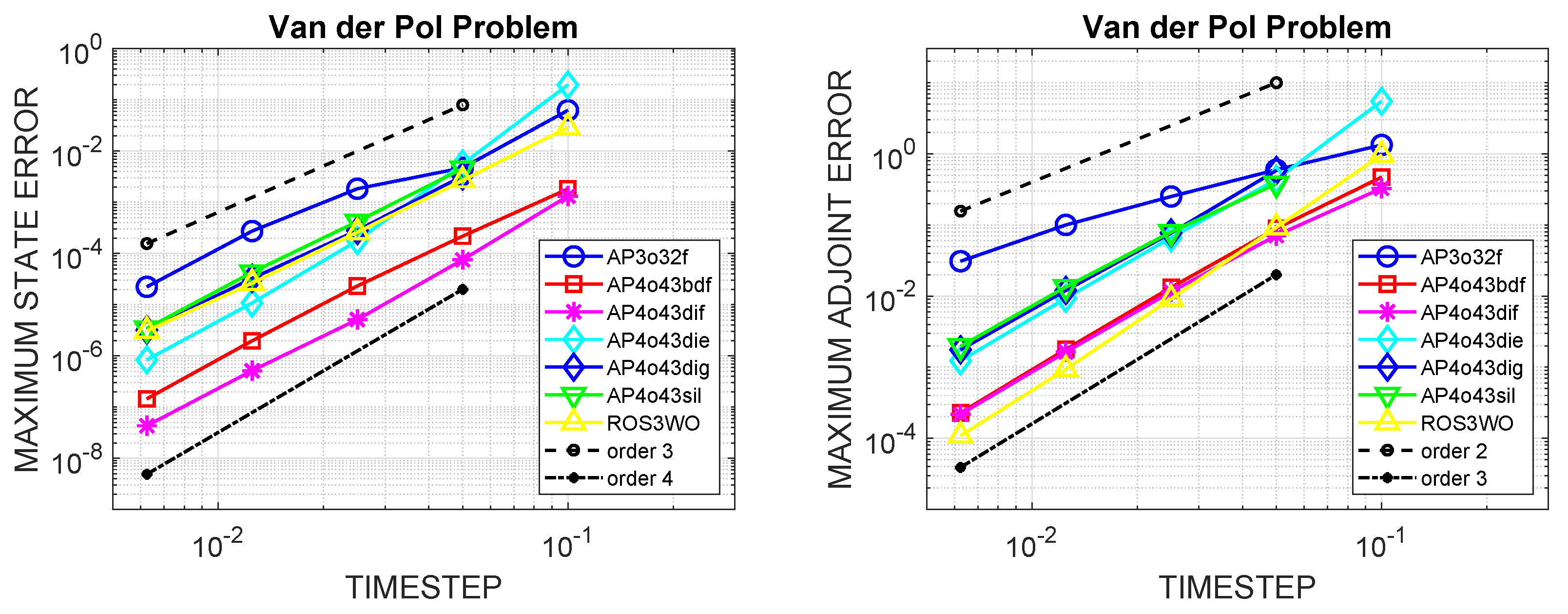
3.2. The van der Pol Oscillator
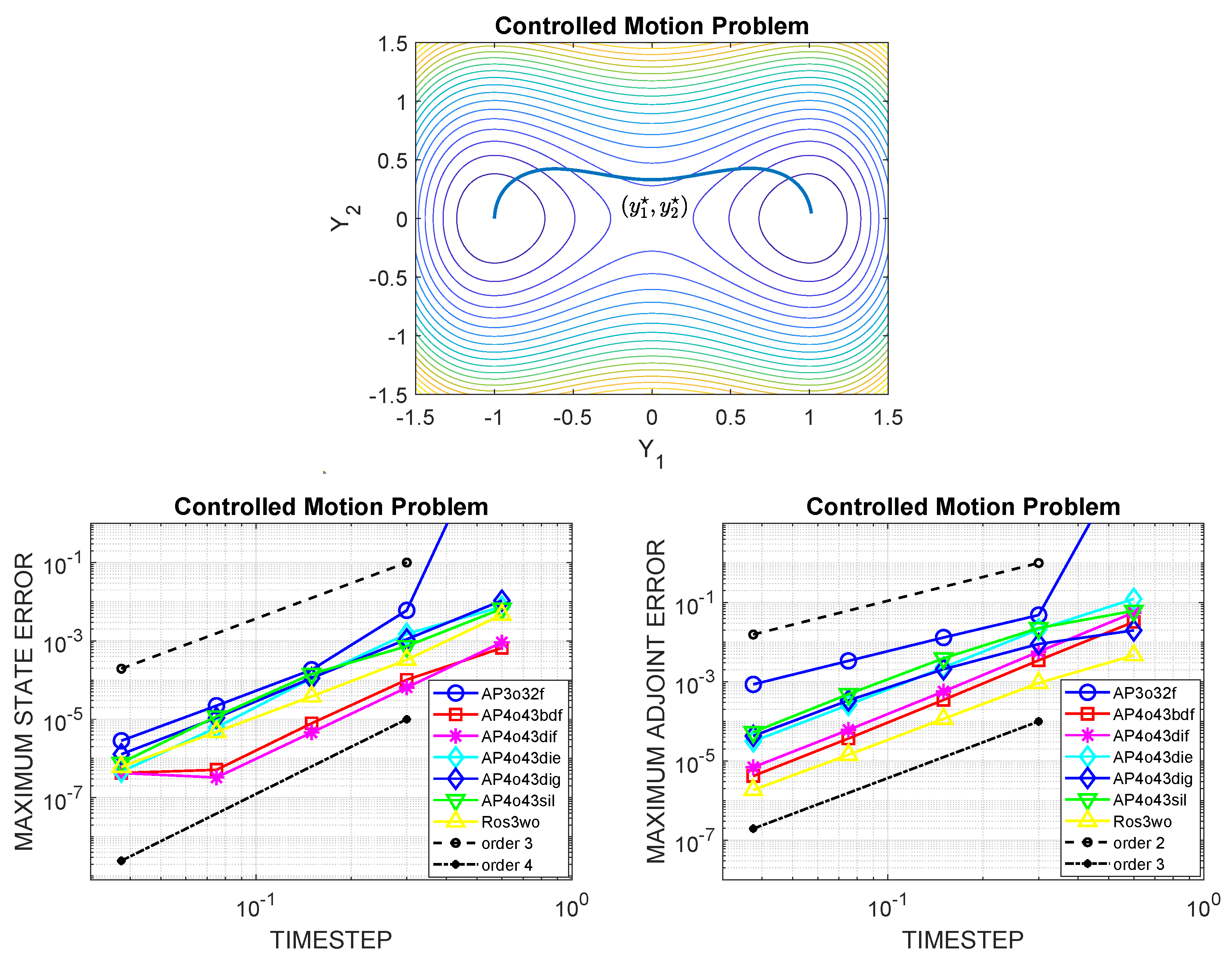
3.3. A Controlled Motion Problem
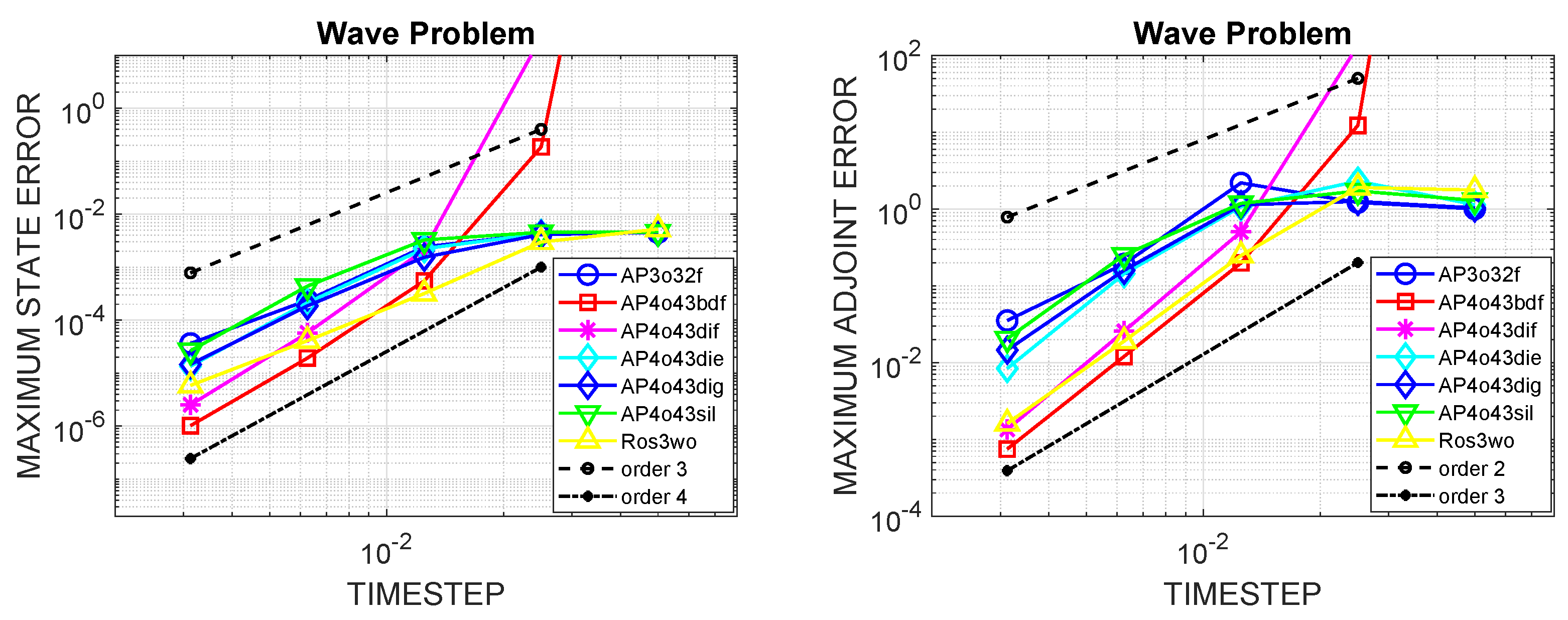
3.4. A Wave Problem
4. Discussion
Author Contributions
Funding
Conflicts of Interest
Appendix A
Appendix A.1. Coefficients of AP4o54bdf
Appendix A.2. Coefficients of AP4o43dif
Appendix A.3. Coefficients of AP4o43dig
Appendix A.4. Coefficients of AP4o43die
Appendix A.5. Coefficients of AP4o43sil
Appendix A.6. Coefficients of AP3o32f
References
- Liu, X.; Frank, J. Symplectic Runge-Kutta discretization of a regularized forward-backward sweep iteration for optimal control problems. J. Comput. Appl. Math. 2021, 383, 113133. [Google Scholar] [CrossRef]
- Sanz-Serna, J. Symplectic Runge–Kutta schemes for adjoint equations, automatic differentiation, optimal control, and more. SIAM Rev. 2016, 58, 3–33. [Google Scholar] [CrossRef]
- Hairer, E.; Wanner, G.; Lubich, C. Geometric Numerical Integration, Structure-Preserving Algorithms for Ordinary Differential Equations; Springer Series in Computational Mathematic; Springer: Berlin/Heidelberg, Germany, 1970; Volume 31. [Google Scholar]
- Matsuda, T.; Miyatake, Y. Generalization of partitioned Runge–Kutta methods for adjoint systems. J. Comput. Appl. Math. 2021, 388, 113308. [Google Scholar] [CrossRef]
- Lang, J.; Verwer, J. W-Methods in Optimal Control. Numer. Math. 2013, 124, 337–360. [Google Scholar] [CrossRef][Green Version]
- Almuslimani, I.; Vilmart, G. Explicit stabilized integrators for stiff optimal control problems. SIAM J. Sci. Comput. 2021, 43, A721–A743. [Google Scholar] [CrossRef]
- Lubich, C.; Ostermann, A. Runge-Kutta approximation of quasi-linear parabolic equations. Math. Comp. 1995, 64, 601–627. [Google Scholar] [CrossRef]
- Ostermann, A.; Roche, M. Runge-Kutta methods for partial differential equations and fractional orders of convergence. Math. Comp. 1992, 59, 403–420. [Google Scholar] [CrossRef]
- Gerisch, A.; Lang, J.; Podhaisky, H.; Weiner, R. High-order linearly implicit two-step peer—Finite element methods for time-dependent PDEs. Appl. Numer. Math. 2009, 59, 624–638. [Google Scholar] [CrossRef]
- Gottermeier, B.; Lang, J. Adaptive Two-Step Peer Methods for Incompressible Navier-Stokes Equations. In Proceedings of the ENUMATH 2009, the 8th European Conference on Numerical Mathematics and Advanced Applications, Uppsala, Sweden, 29 June–3 July 2009; Kreiss, G., Lötstedt, P., Malqvist, A., Neytcheva, M., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 387–395. [Google Scholar]
- Albi, G.; Herty, M.; Pareschi, L. Linear multistep methods for optimal control problems and applications to hyperbolic relaxation systems. Appl. Math. Comput. 2019, 354, 460–477. [Google Scholar] [CrossRef]
- Sandu, A. Reverse automatic differentiation of linear multistep methods. In Advances in Automatic Differentiation; Lecture Notes in Computational Science and Engineering; Bischof, C., Bücker, H., Hovland, P., Naumann, U., Utke, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; Volume 64, pp. 1–12. [Google Scholar]
- Lang, J.; Schmitt, B. Discrete adjoint implicit peer methods in optimal control. J. Comput. Appl. Math. 2022, 416, 114596. [Google Scholar] [CrossRef]
- Hager, W. Runge-Kutta methods in optimal control and the transformed adjoint system. Numer. Math. 2000, 87, 247–282. [Google Scholar] [CrossRef]
- Troutman, J. Variational Calculus and Optimal Control; Springer: New York, NY, USA, 1996. [Google Scholar]
- Bonnans, F.; Laurent-Varin, J. Computation of order conditions for symplectic partitioned Runge-Kutta schemes with application to optimal control. Numer. Math. 2006, 103, 1–10. [Google Scholar] [CrossRef]
- Herty, M.; Pareschi, L.; Steffensen, S. Implicit-Explicit Runge-Kutta schemes for numerical discretization of optimal control problems. SIAM J. Numer. Anal. 2013, 51, 1875–1899. [Google Scholar] [CrossRef]
- Sandu, A. On the properties of Runge-Kutta discrete adjoints. Lect. Notes Comput. Sci. 2006, 3394, 550–557. [Google Scholar]
- Schröder, D.; Lang, J.; Weiner, R. Stability and consistency of discrete adjoint implicit peer methods. J. Comput. Appl. Math. 2014, 262, 73–86. [Google Scholar] [CrossRef]
- Montijano, J.; Podhaisky, H.; Randez, L.; Calvo, M. A family of L-stable singly implicit Peer methods for solving stiff IVPs. BIT 2019, 59, 483–502. [Google Scholar] [CrossRef]
- Schmitt, B.; Weiner, R. Efficient A-stable peer two-step methods. J. Comput. Appl. Math. 2017, 316, 319–329. [Google Scholar] [CrossRef]
- Schmitt, B. Algebraic criteria for A-stability of peer two-step methods. Technical Report. arXiv 2015, arXiv:1506.05738. [Google Scholar]
- Jackiewicz, Z. General Linear Methods for Ordinary Differential Equations; John Wiley&Sons: Hoboken, NJ, USA, 2009. [Google Scholar]
- Jacobson, D.; Mayne, D. Differential Dynamic Programming; American Elsevier Publishing: New York, NY, USA, 1970. [Google Scholar]
- Dontchev, A.; Hager, W.; Veliov, V. Second-order Runge-Kutta approximations in control constrained optimal control. SIAM J. Numer. Anal. 2000, 38, 202–226. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Steps | Forward: | Adjoint: |
|---|---|---|
| Start, | (29) | (33),(61), |
| Standard, | (30) | (33) |
| Superconvergence | (52) | (53) |
| Compatibility | (67) | (67) |
| Last step | (30), | (33), |
| End point | (31) | (34),(61), |
| Starting Method | End Method | ||||||
|---|---|---|---|---|---|---|---|
| Triplet | Blocks | Blocks | |||||
| AP4o43bdf | 3+1 | 5.47 | 1 | 1+3 | 3.81 | 1 | 1.15 |
| AP4o43dif | 3+1 | 6.27 | 1 | 1+3 | 4.40 | 1 | 1.03 |
| AP4o43dig | 4 | 0.99 | 1 | 4 | 0.89 | 1.001 | 1 |
| AP4o43sil | 3+1 | 1.88 | 1 | 4 | 0.72 | 1 | 1.03 |
| AP4o43die | 3+1 | 3.80 | 1 | 1+3 | 0.66 | 2.6 | 1.98 |
| AP3o32f | 1+1+1 | 1.50 | 1.02 | 1+2 | 0.94 | 1 | 1 |
| s | Triplet | Nodes | Remarks | ||||
|---|---|---|---|---|---|---|---|
| 4 | AP4o43bdf | BDF4 | 5.79 | 0.099 | 0 | singly-implicit | |
| AP4o43dif | 0.26 | 0.0025 | diag.-implicit | ||||
| AP4o43dig | 24.5 | 0.798 | 0.0260 | = 1 | |||
| AP4o43sil | 32.2 | 0.60 | 0.0230 | = 1, sing.impl. | |||
| AP4o43die | 6.08 | 0.66 | 0.0135 | nodes alternate | |||
| 3 | AP3o32f | 15.3 | 0.91 | 0.0170 | nodes alternate |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lang, J.; Schmitt, B.A. Implicit A-Stable Peer Triplets for ODE Constrained Optimal Control Problems. Algorithms 2022, 15, 310. https://doi.org/10.3390/a15090310
Lang J, Schmitt BA. Implicit A-Stable Peer Triplets for ODE Constrained Optimal Control Problems. Algorithms. 2022; 15(9):310. https://doi.org/10.3390/a15090310
Chicago/Turabian StyleLang, Jens, and Bernhard A. Schmitt. 2022. "Implicit A-Stable Peer Triplets for ODE Constrained Optimal Control Problems" Algorithms 15, no. 9: 310. https://doi.org/10.3390/a15090310
APA StyleLang, J., & Schmitt, B. A. (2022). Implicit A-Stable Peer Triplets for ODE Constrained Optimal Control Problems. Algorithms, 15(9), 310. https://doi.org/10.3390/a15090310