
PSO Optimized Active Disturbance Rejection Control for Aircraft Anti-Skid Braking System


Abstract
:1. Introduction
2. System Description
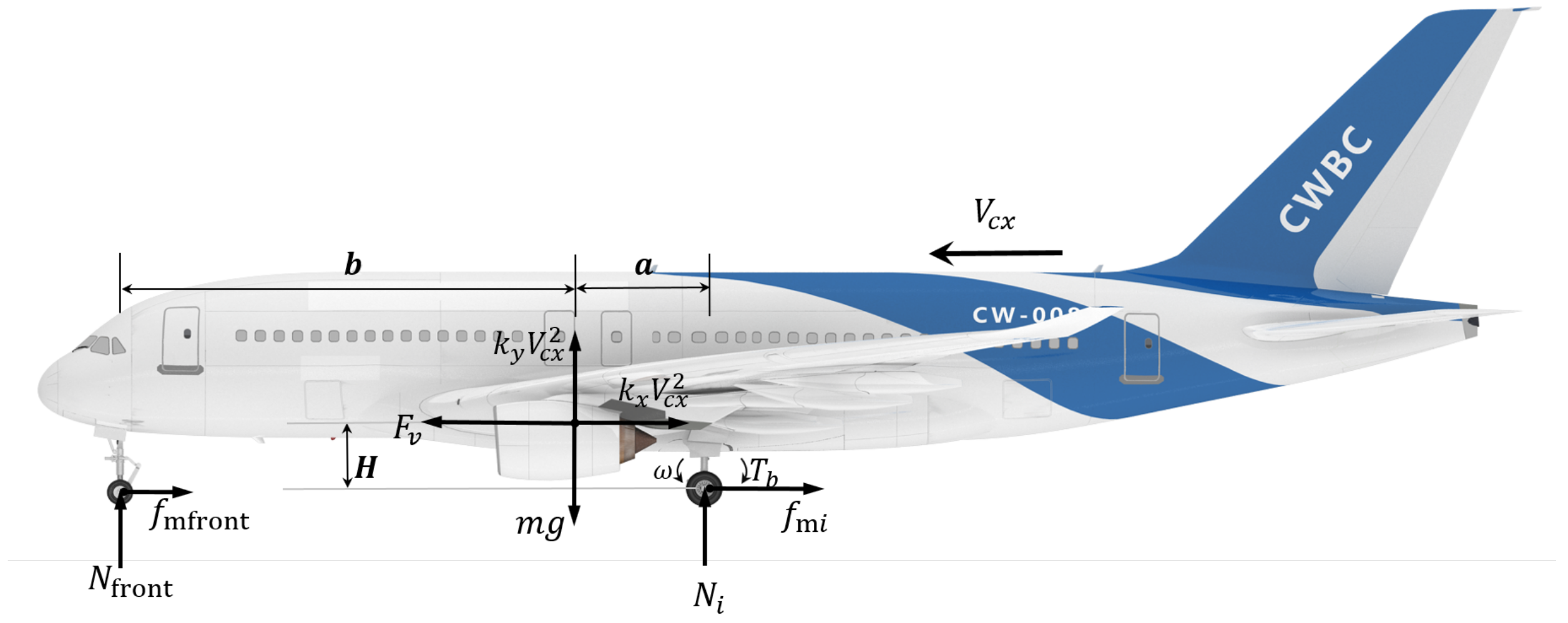
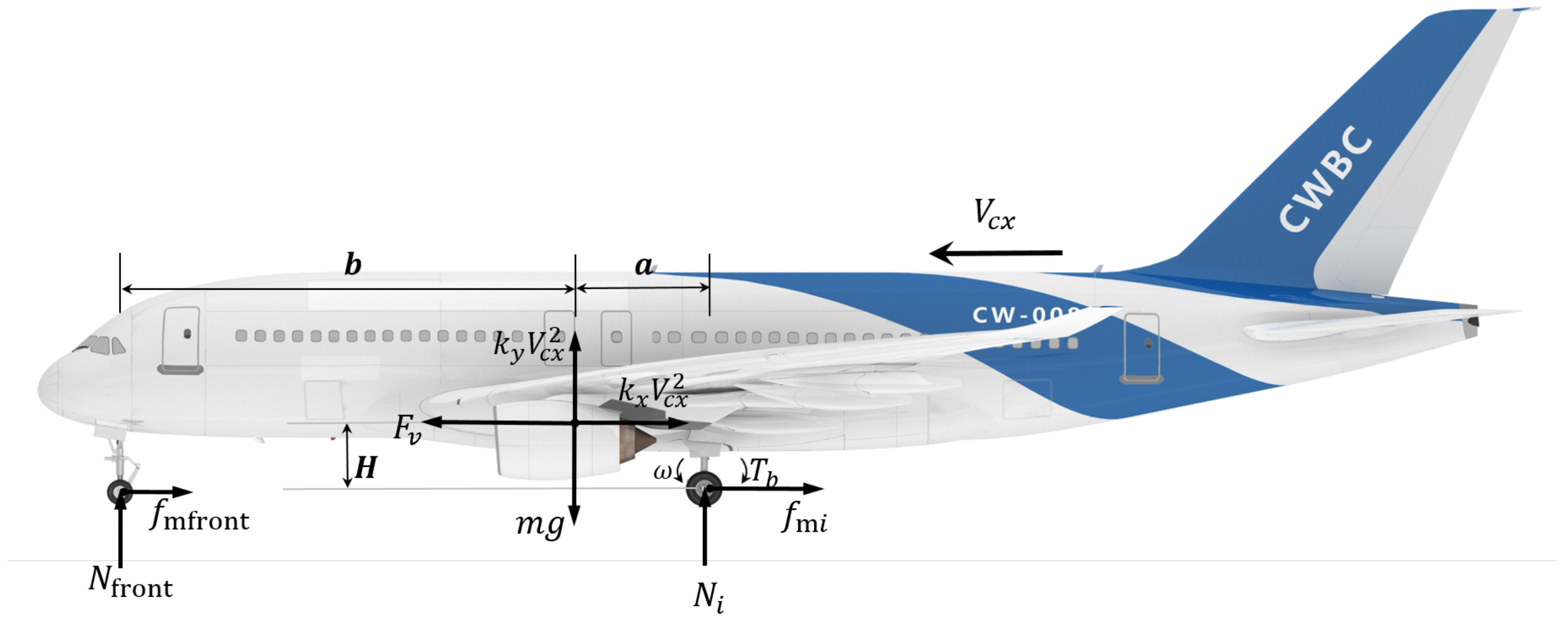
2.1. Aircraft Landing System Dynamics
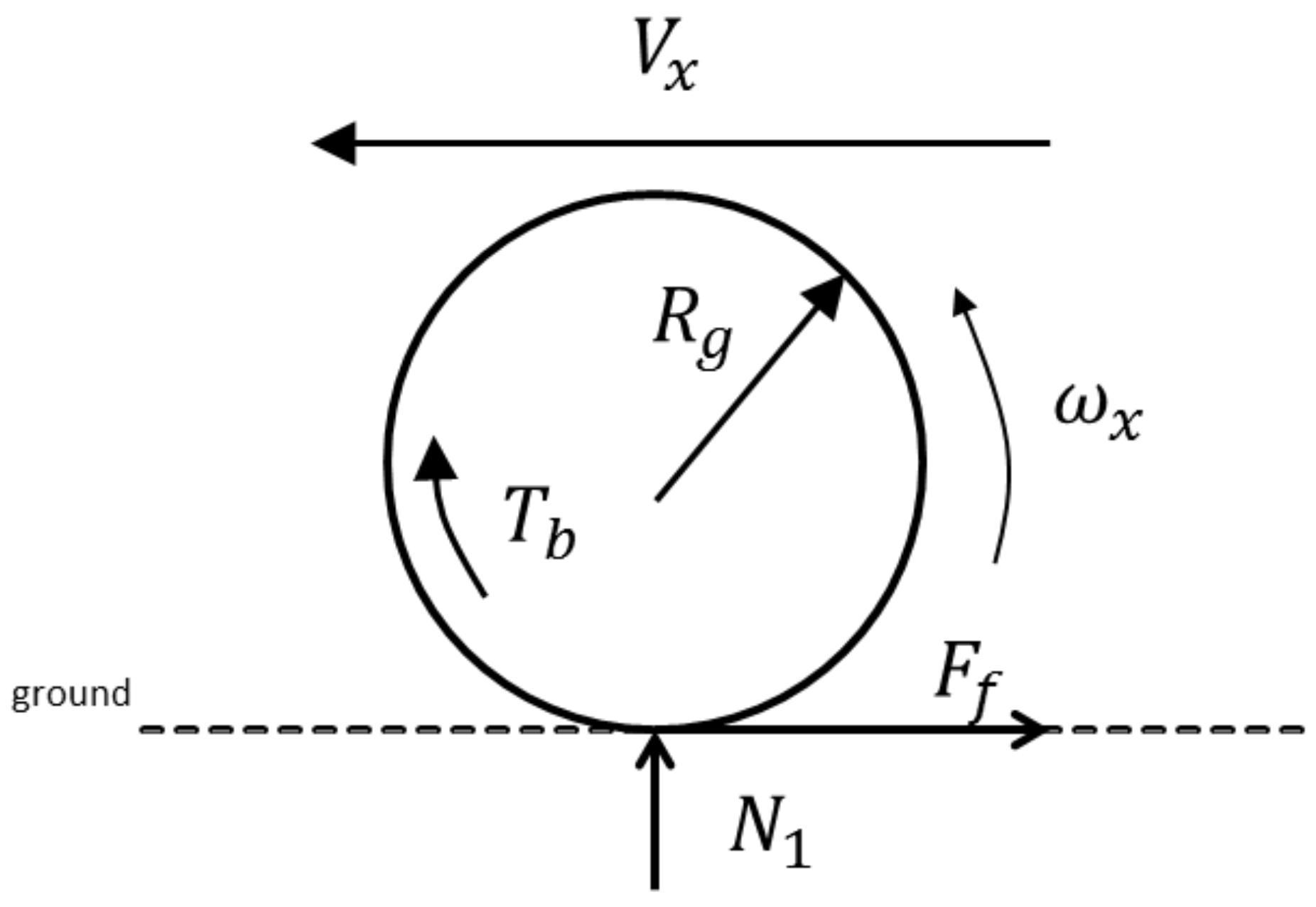
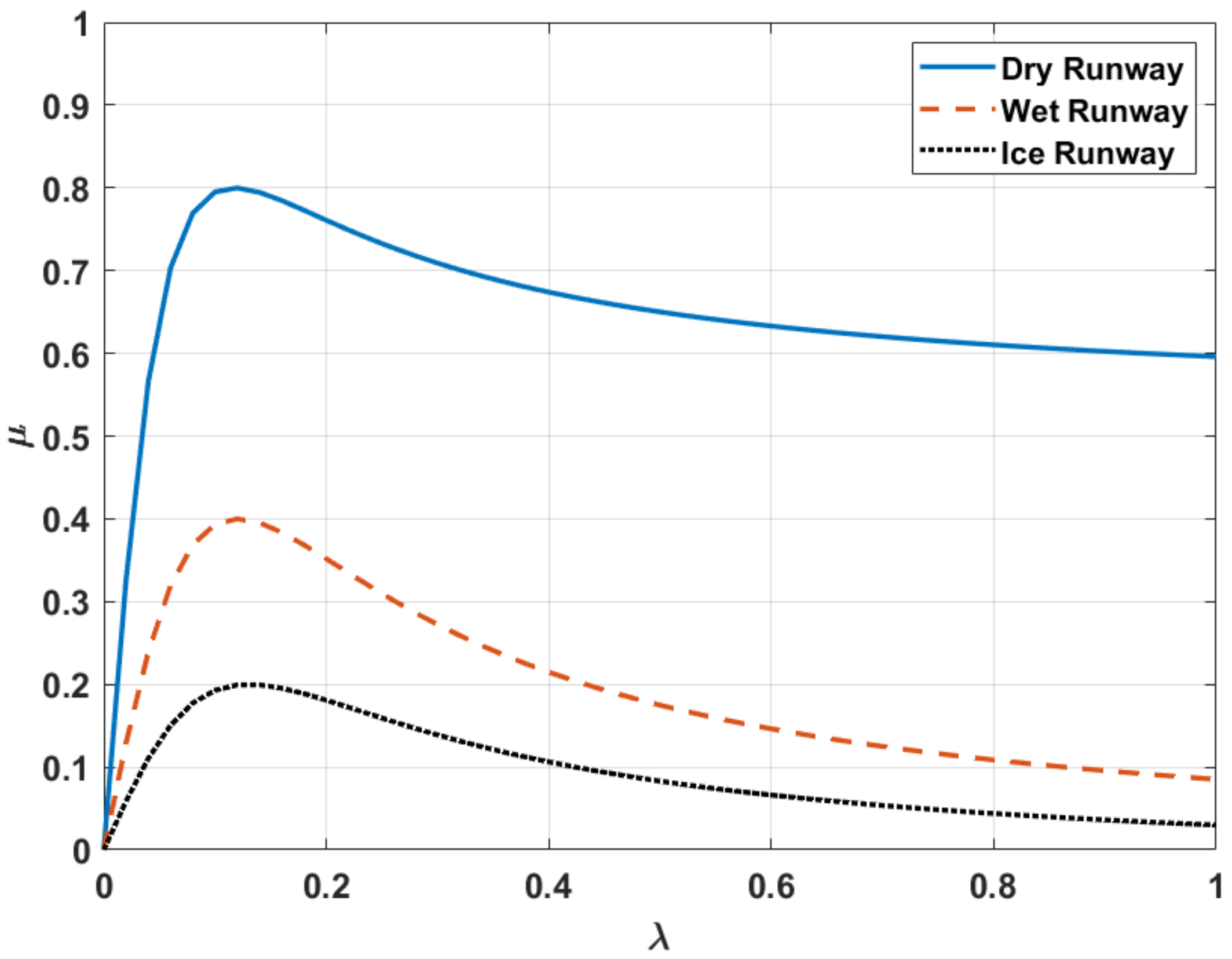
2.2. Aircraft Tire Dynamics
3. Problem Formulation
4. Controller Design
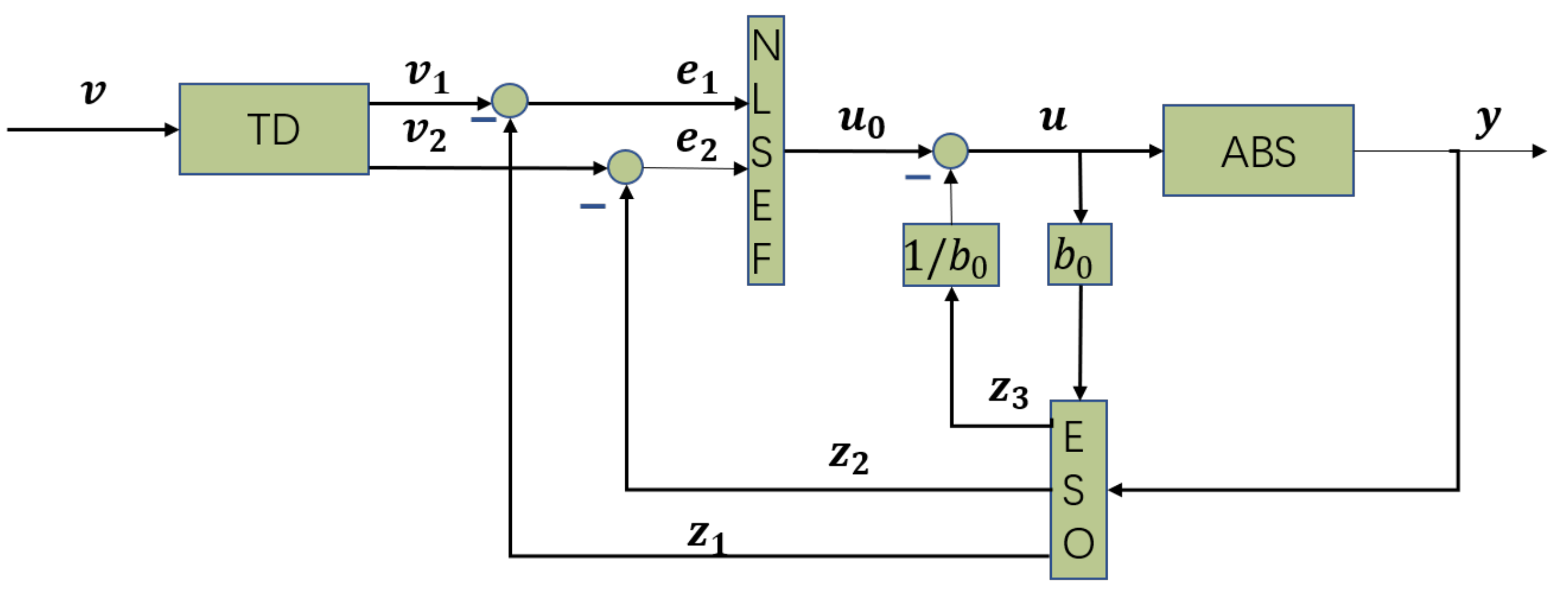
4.1. Design and Parameter Optimization of Aircraft Anti-Skid Braking Active Disturbance Rejection Controller
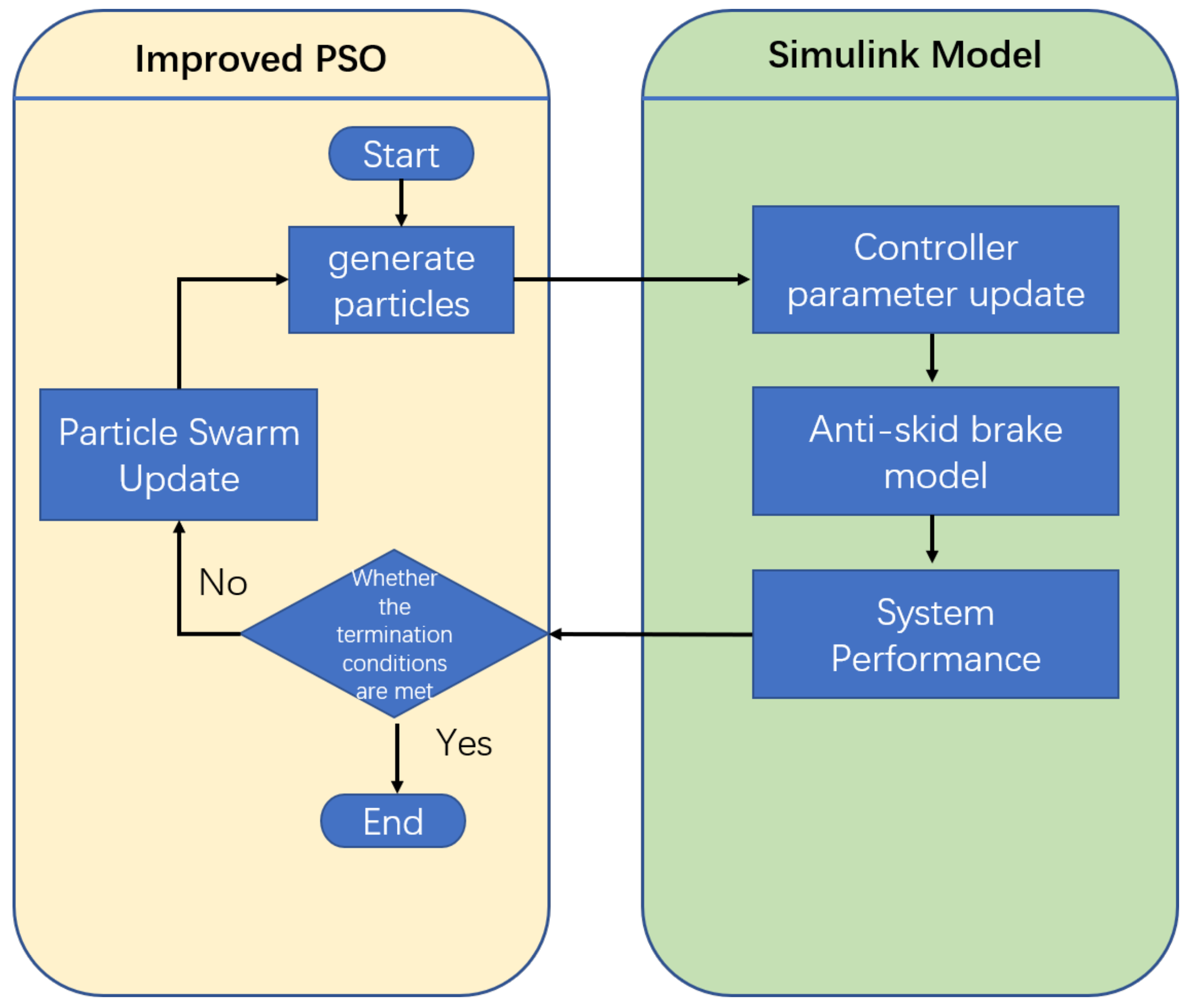
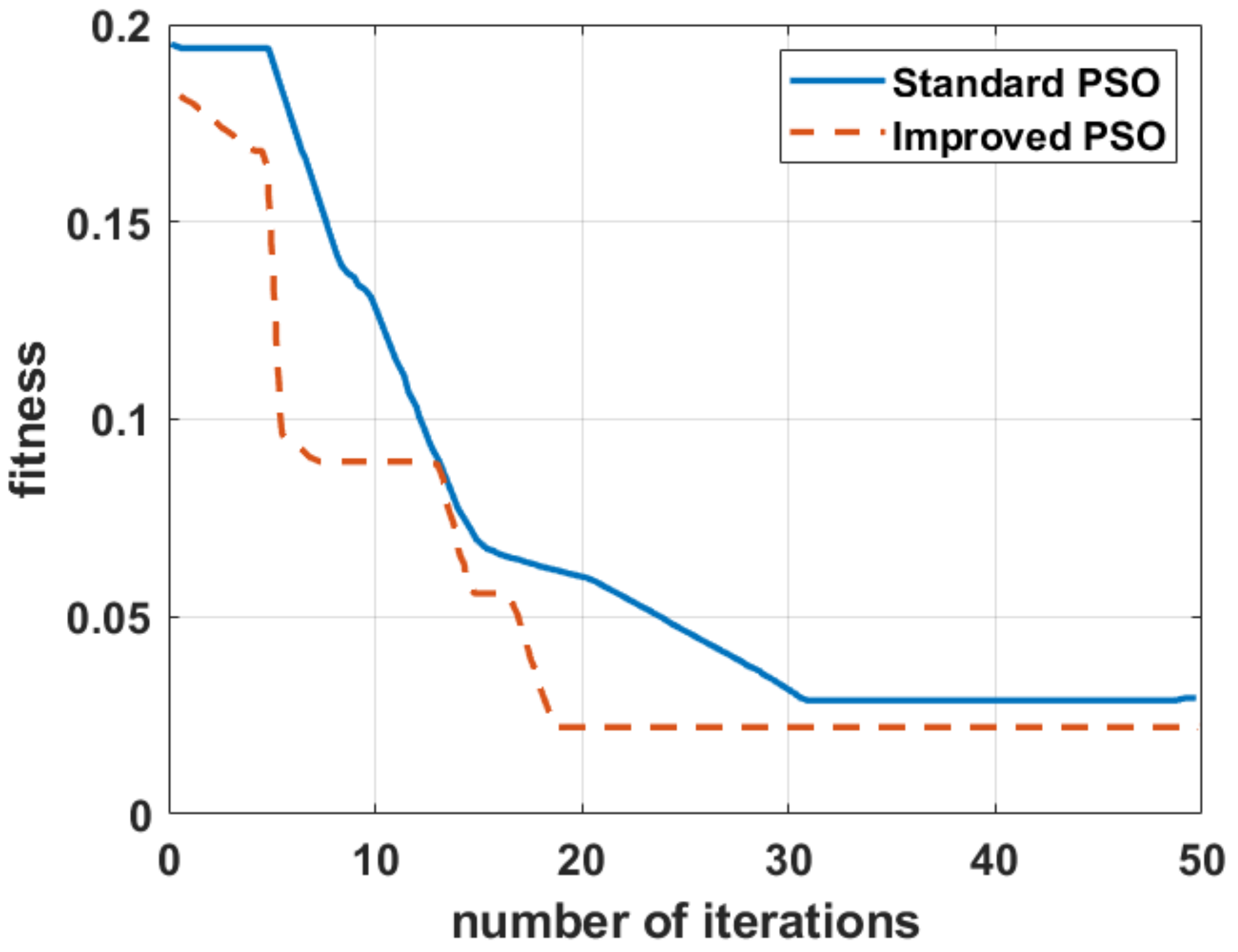
4.2. Optimization of Control Parameters Based on Improved Particle Swarm Optimization
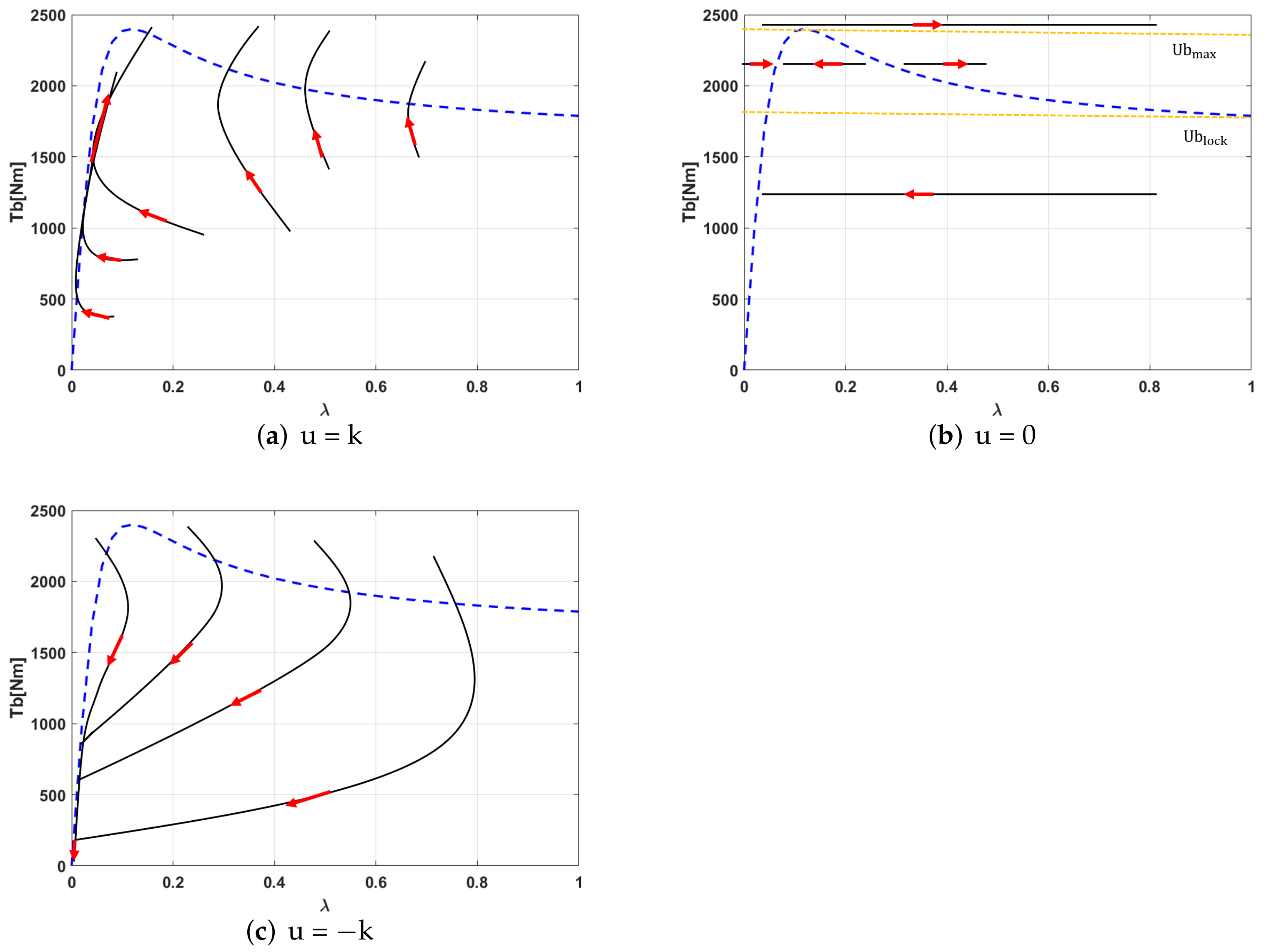
4.3. Stability Analysis
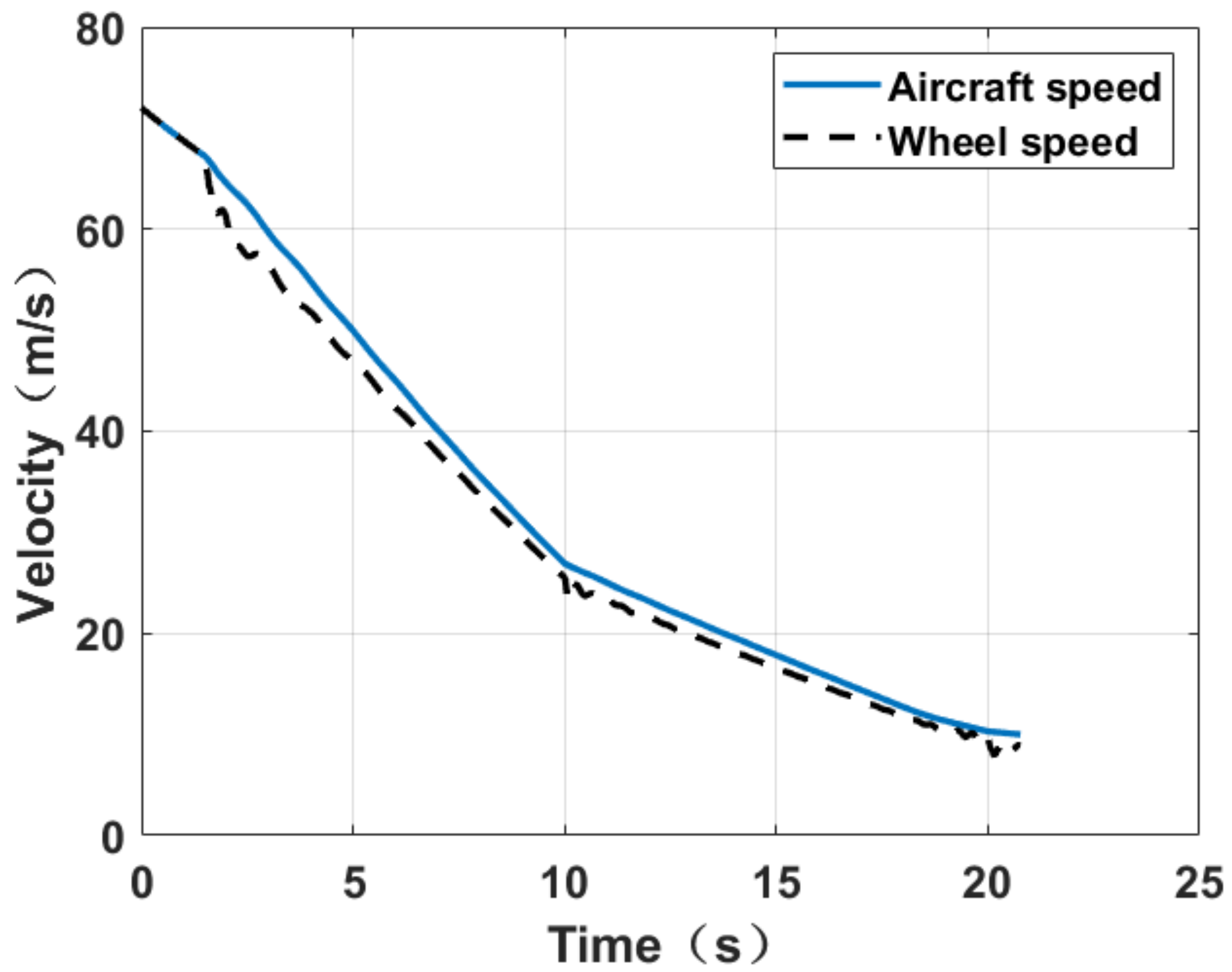
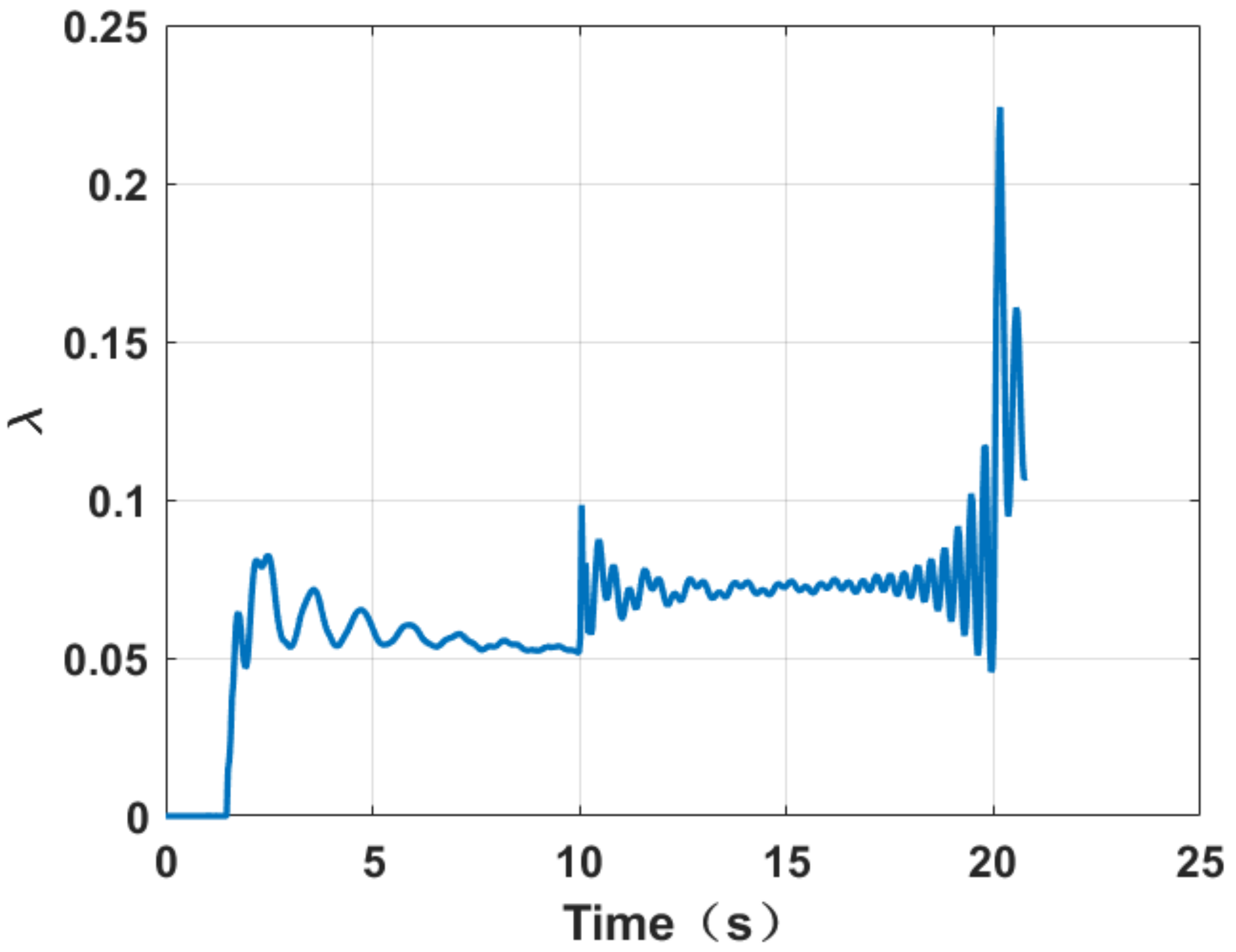
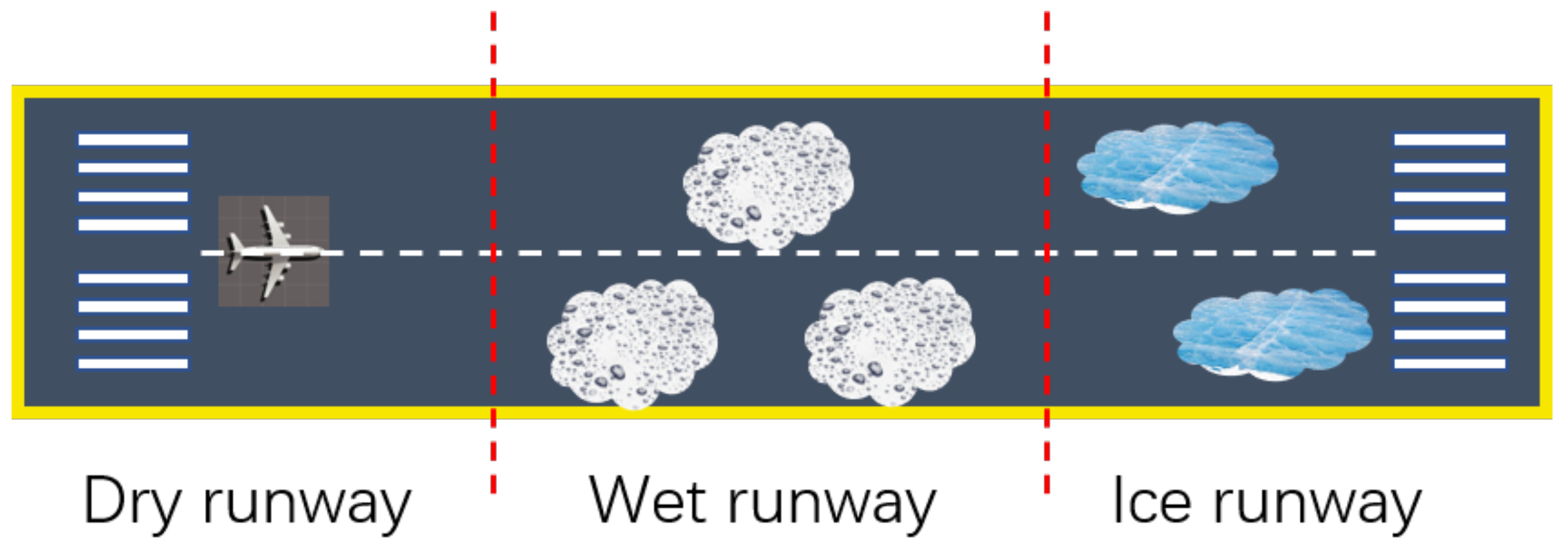
5. Simulation Study for Hybrid Runway Conditions
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ADRC | Active disturbance rejection control |
| ABS | Aircraft anti-skid braking system |
| PSO | Particle swarm optimization |
References
- Jiao, Z.; Wang, Z.; Sun, D.; Liu, X.; Shang, Y.; Wu, S. A novel aircraft anti-skid brake control method based on runway maximum friction tracking algorithm. Aerosp. Sci. Technol. 2021, 110, 106482. [Google Scholar] [CrossRef]
- Du, C.; Li, F.; Yang, C.; Shi, Y.; Liao, L.; Gui, W. Multi-Phase-Based Optimal Slip Ratio Tracking Control of Aircraft Antiskid Braking System via Second-Order Sliding Mode Approach. IEEE-ASME Trans. Mechatron. 2021, 27, 823–833. [Google Scholar] [CrossRef]
- Tanelli, M.; Astolfi, A.; Savaresi, S.M. Robust nonlinear output feedback control for brake by wire control systems. Automatica 2008, 44, 1078–1087. [Google Scholar] [CrossRef]
- Johansen, T.A.; Petersen, I.; Kalkkuhl, J.C.; Lüdemann, J. Gain-scheduled wheel slip control in automotive brake systems. IEEE Trans. Control. Syst. Technol. 2003, 11, 799–811. [Google Scholar] [CrossRef] [Green Version]
- Qiu, Y.; Liang, X.; Dai, Z. Backstepping dynamic surface control for an anti-skid braking system. Control Eng. Pract. 2015, 42, 140–152. [Google Scholar] [CrossRef]
- Radac, M.B.; Precup, R. Data-driven model-free slip control of anti-lock braking systems using reinforcement Q-learning. Neurocomputing 2018, 275, 317–329. [Google Scholar] [CrossRef]
- Radac, M.B.; Precup, R.; Roman, R.C. Anti-lock braking systems data-driven control using Q-learning. In Proceedings of the 2017 IEEE 26th International Symposium on Industrial Electronics (ISIE), Edinburgh, UK, 19–21 June 2017; pp. 418–423. [Google Scholar]
- Qi, X.; Li, J.; Xia, Y.; Gao, Z. On the Robust Stability of Active Disturbance Rejection Control for SISO Systems. Circuits Syst. Signal Process. 2017, 36, 65–81. [Google Scholar] [CrossRef]
- Chen, Z.; Zong, X.; Tang, W.; Huang, D. Design of rapid exponential integral nonlinear tracking differentiator. Int. J. Control. 2021, 1–8. [Google Scholar] [CrossRef]
- Han, J. From PID to Active Disturbance Rejection Control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Qu, J.; Xia, Y.; Shi, Y.; Cao, J.; Wang, H.; Meng, Y. Modified ADRC for Inertial Stabilized Platform with Corrected Disturbance Compensation and Improved Speed Observer. IEEE Access 2020, 8, 157703–157716. [Google Scholar] [CrossRef]
- Merino, J.S.; Castro, M.D.; Masi, A. An Application of Active Disturbance Rejection Control to Stepper Motors with Field Oriented Control. In Proceedings of the 2021 22nd IEEE International Conference on Industrial Technology (ICIT), Valencia, Spain, 10–12 March 2021; Volume 1, pp. 142–147. [Google Scholar]
- Kou, Y.; Yu-Ren, L.I.; Liang, B. Design of Aircraft Electrical Integrated Test Management System Based on LabVIEW. Mod. Electron. Tech. 2011, 34, 124–127. [Google Scholar]
- Zhang, X.; Lin, H. Backstepping Adaptive Neural Network Control for Electric Braking Systems of Aircrafts. Algorithms 2019, 12, 215. [Google Scholar] [CrossRef] [Green Version]
- Pacejka, H.B. Tire and Vehicle Dynamics; Elsevier: Amsterdam, The Netherlands, 2012. [Google Scholar]
- Kadir, Z.A.; Bakar, S.A.A.; Samin, P.M.; Hudha, K.; Harun, M.H. A new approach in modelling of hitch joint of a tractor semi-trailer using virtual Pacejka tyre model. Int. J. Heavy Veh. Syst. 2021, 28, 262. [Google Scholar] [CrossRef]
- Cabrera, J.A.; Castillo, J.J.; Pérez, J.; Velasco, J.M.; Guerra, A.J.; Hernández, P. A Procedure for Determining Tire-Road Friction Characteristics Using a Modification of the Magic Formula Based on Experimental Results. Sensors 2018, 18, 896. [Google Scholar] [CrossRef] [Green Version]
- Chen, H.; Sun, X.; Xu, S.; Wang, Y. Robust Stabilization of Extended Nonholonomic Chained-Form Systems with Dynamic Nonlinear Uncertain Terms by Using Active Disturbance Rejection Control. Complexity 2019, 2019, 1365134. [Google Scholar] [CrossRef]
- Wang, Q.; Ran, M.; Dong, C. On Finite-Time Stabilization of Active Disturbance Rejection Control for Uncertain Nonlinear Systems. Asian J. Control 2018, 20, 415–424. [Google Scholar] [CrossRef] [Green Version]
- Jie, L.; Qi, X.; Xia, Y.; Ma, D.; Xu, Y. On the absolute stability of nonlinear ADRC for SISO systems. In Proceedings of the 2015 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015. [Google Scholar]
- Sun, Z.; Zhou, J.; Ling, Y.; Xie, X.; Yu, Y.; Sun, Z. Designing and application of modified SSA based ADRC controller for overhead crane systems. Int. J. Intell. Robot. Appl. 2022, 1–18. [Google Scholar] [CrossRef]
- Wu, D.; Chen, K. Frequency-Domain Analysis of Nonlinear Active Disturbance Rejection Control via the Describing Function Method. IEEE Trans. Ind. Electron. 2013, 60, 3906–3914. [Google Scholar] [CrossRef]
- Wu, D.; Chen, K. Limit cycle analysis of active disturbance rejection control system with two nonlinearities. ISA Trans. 2014, 53, 947–954. [Google Scholar] [CrossRef]
- Li, J.; Qi, X.; Xia, Y.; Gao, Z. On asymptotic stability for nonlinear ADRC based control system with application to the ball-beam problem. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016; pp. 4725–4730. [Google Scholar]
- Churilov, A.N. On an Application of the Absolute Stability Theory to Sampled-Data Stabilization. Math. Probl. Eng. 2018, 2018, 3169609. [Google Scholar] [CrossRef] [Green Version]
- Grabowski, P. Absolute stability criteria for infinite-dimensional discrete Lur’e systems with application to loaded distortionless electric RLCG-transmission line. J. Differ. Equ. Appl. 2013, 19, 304–331. [Google Scholar] [CrossRef]
- Jager, D. Nonlinear Control System Analysis and Design with Maple. Available online: https://pure.tue.nl/ws/files/4290655/604064.pdf (accessed on 15 March 2022).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Description |
|---|---|
| m | Aircraft mass |
| v | Aircraft longitudinal velocity |
| Engine residual thrust | |
| Aerodynamic drag | |
| Aerodynamic lift | |
| Parachute drag | |
| Braking force | |
| Support force of main landing gear | |
| Support force of nose landing gear | |
| n | Number of main wheels |
| Height of center of gravity | |
| Distance between parachute drag line and gravity center | |
| a | Distance between main wheel and gravity center |
| b | Distance between front wheel and gravity center |
| Air density | |
| Aerodynamic drag coefficient | |
| Aerodynamic lift coefficient | |
| Parachute drag coefficient | |
| Aerodynamic drag coefficient | |
| Aerodynamic lift coefficient | |
| Parachute area | |
| Velocity coefficient of engine | |
| Velocity coefficient of engine |
| Road Condition | B | C | D |
|---|---|---|---|
| Dry | 14.0326 | 1.5344 | 0.8 |
| Wet | 8.2098 | 2.0192 | 0.4 |
| Ice | 7.201788 | 2.0875 | 0.2 |
| Parameter | |||||
|---|---|---|---|---|---|
| Position upper limit | 300 | 300 | 200 | 1000 | 4000 |
| Position lower limit | 0.5 | 0.5 | 50 | 50 | 50 |
| Velocity upper limit | 1 | 1 | 2 | 5 | 5 |
| Velocity lower limit | −1 | −1 | −2 | −5 | −5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, F.; Chen, M.; Liang, X.; Liu, W. PSO Optimized Active Disturbance Rejection Control for Aircraft Anti-Skid Braking System. Algorithms 2022, 15, 158. https://doi.org/10.3390/a15050158
Xu F, Chen M, Liang X, Liu W. PSO Optimized Active Disturbance Rejection Control for Aircraft Anti-Skid Braking System. Algorithms. 2022; 15(5):158. https://doi.org/10.3390/a15050158
Chicago/Turabian StyleXu, Fengrui, Mengqiao Chen, Xuelin Liang, and Wensheng Liu. 2022. "PSO Optimized Active Disturbance Rejection Control for Aircraft Anti-Skid Braking System" Algorithms 15, no. 5: 158. https://doi.org/10.3390/a15050158
APA StyleXu, F., Chen, M., Liang, X., & Liu, W. (2022). PSO Optimized Active Disturbance Rejection Control for Aircraft Anti-Skid Braking System. Algorithms, 15(5), 158. https://doi.org/10.3390/a15050158