

BCCC Disjoint Path Construction Algorithm and Fault-Tolerant Routing Algorithm under Restricted Connectivity

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
- We first propose a vertex disjoint path construction algorithm in BCCC. Time complexity is o(). With this algorithm, n vertex disjoint paths can be constructed for any two vertices in the BCCC.
- (2)
- We prove that under the condition that each vertex has at least one fault-free neighbor in BCCC, its restricted connectivity is and , when and , respectively, where is the connectivity.
- (3)
- We give an fault-free algorithm, where denotes the restricted connectivity of BCCC. This algorithm can obtain a fault-free path between any two distinct fault-free vertices under the condition that each vertex has at least one fault-free neighbor.
2. Preliminaries
2.1. Graph-Theoretic Terms
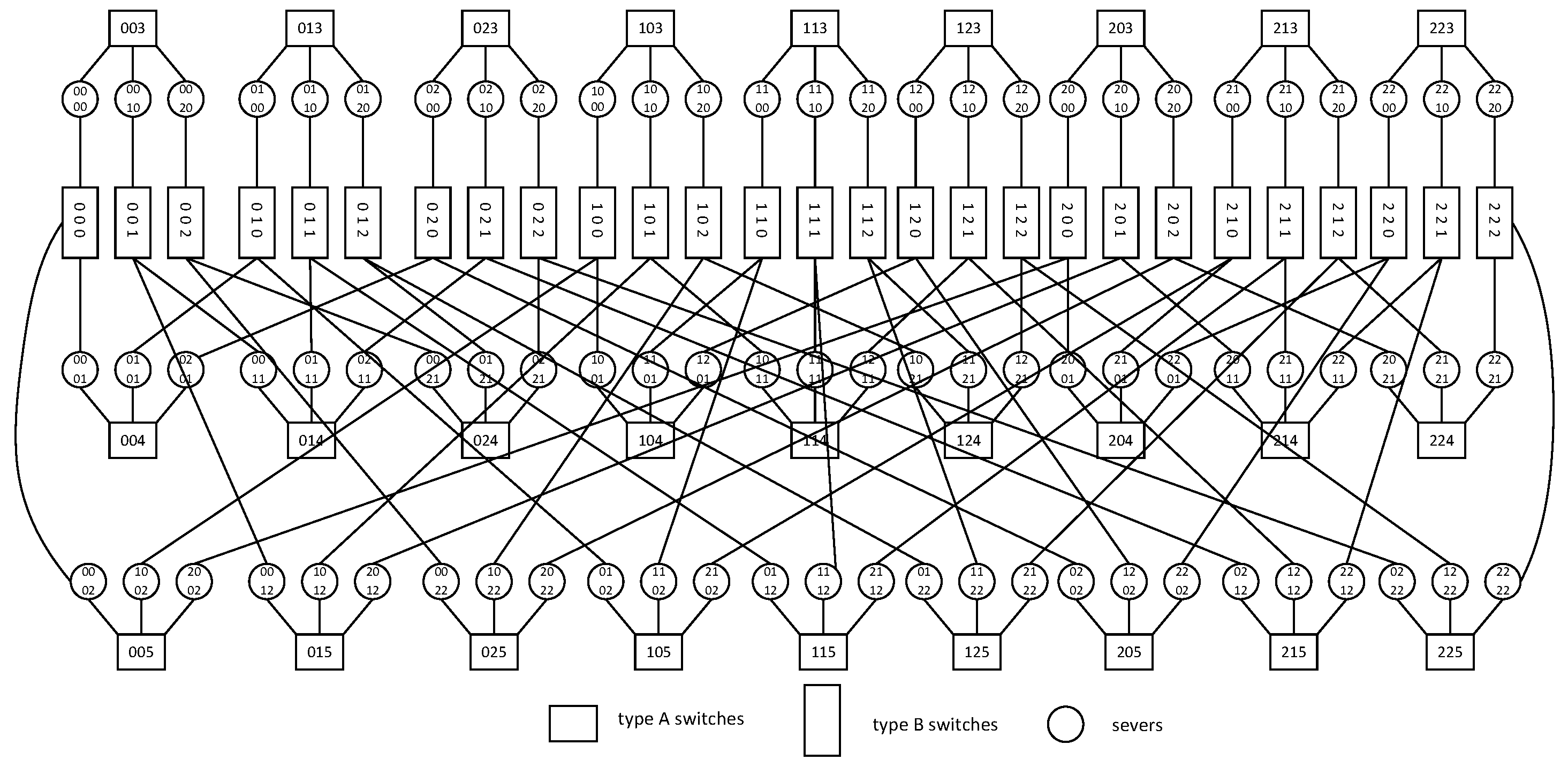
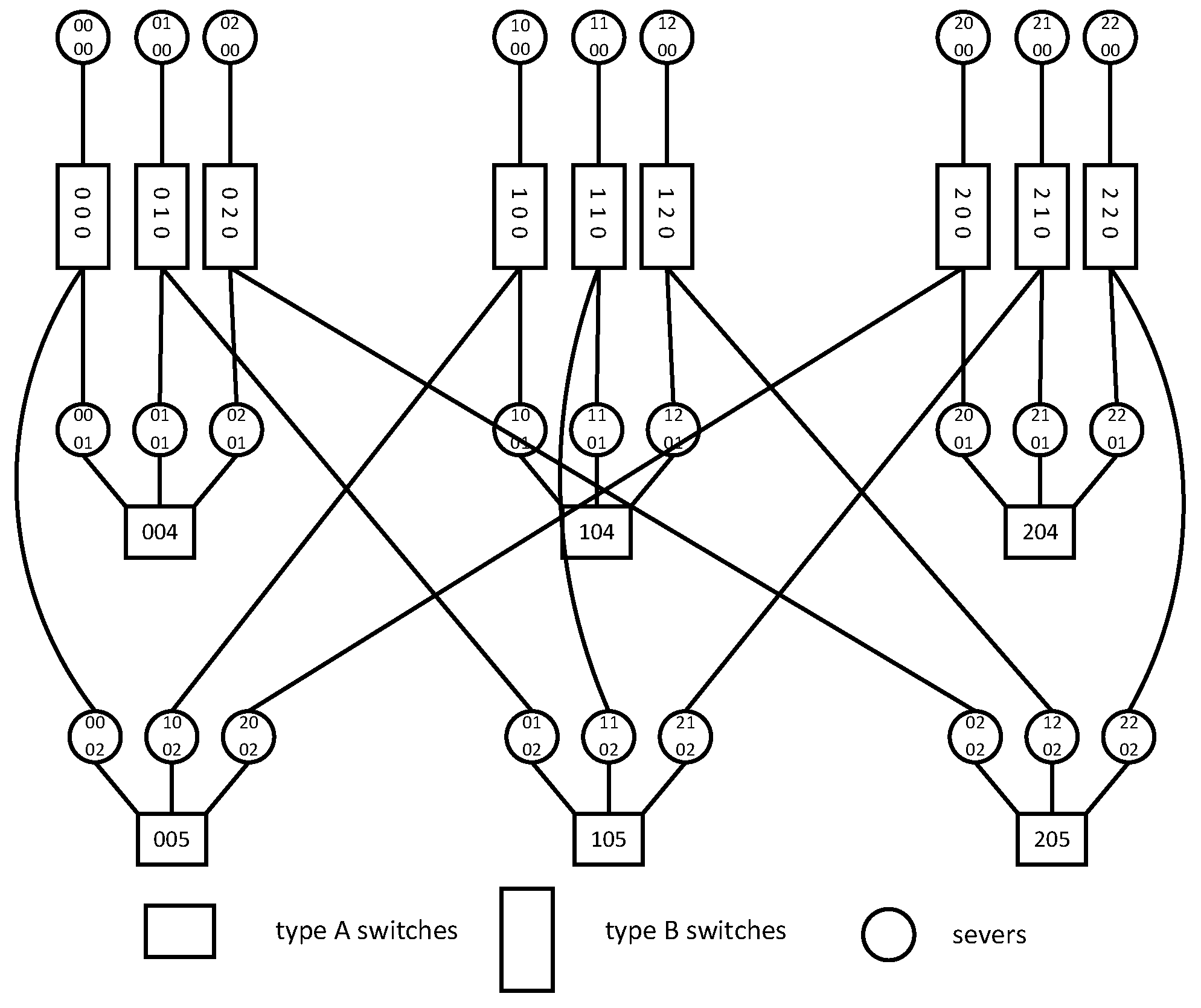
2.2. Structure and Properties of BCCC
- (1)
- is (n+k−1)-regular graph. .
- (2)
- The connectivity of is
- (3)
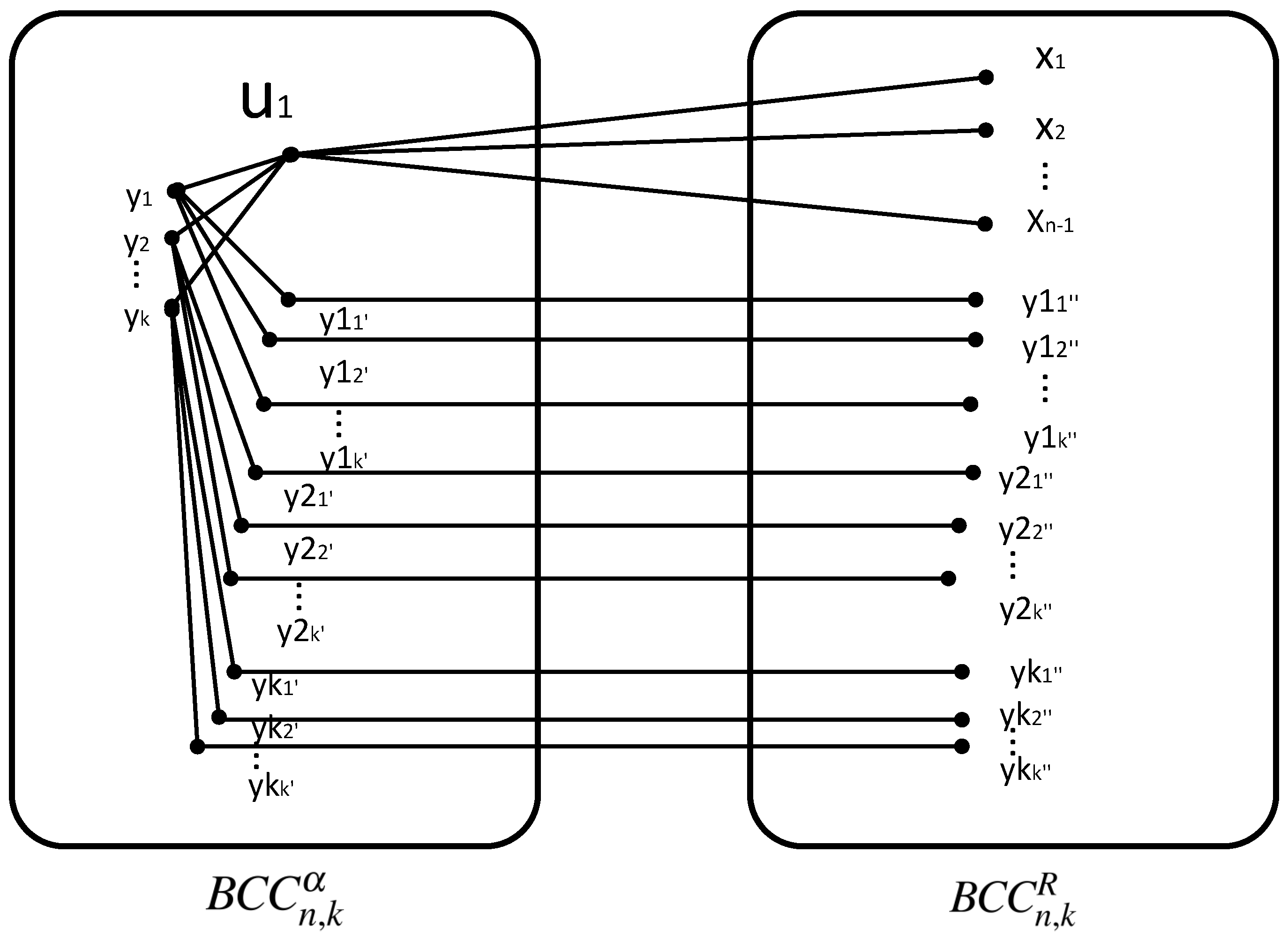
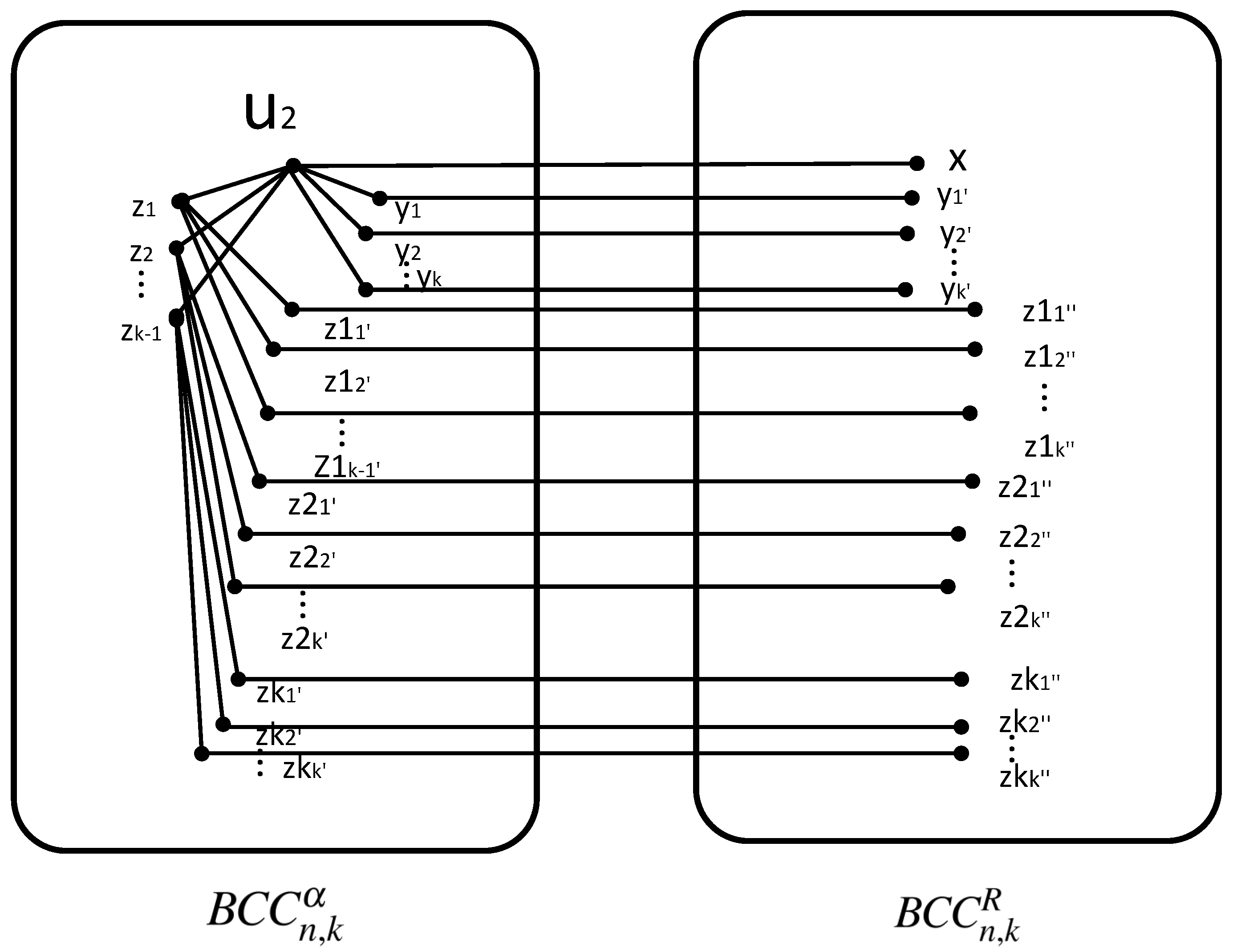
- There are vertex disjoint paths connecting different in .
3. Vertex Disjoint Path Construction Algorithm
3.1. Algorithm Description and Implementation
| Algorithm 1 Vertex Disjoint Path Algorithm of BCCC. |
| Input: Two different vertices u = and v = in . Let the neighbor node of the same type A switch with v be , and select any a neighbor node in the same type B switch as . |
| Output:n vertex disjoint paths from u to v. |
| 1: function BuildPathSet() |
| 2: ; |
| 3: for do |
| 4: , ; |
| 5: add u to ; |
| 6: if i then |
| 7: u = , = i, i ; |
| 8: add u to ; |
| 9: for j = k + 1; j > 0; j do |
| 10: if then |
| 11: break; |
| 12: if then |
| 13: u, = CONVERT(u, v, , , ); |
| 14: if then |
| 15: u = ; |
| 16: add u to ; |
| 17: if then |
| 18: add v, z to ; |
| 19: print(); |
| 20: function CONVERT(u, v, , , ) |
| 21: , x ; |
| 22: , y ; |
| 23: if == then |
| 24: ; |
| 25: else |
| 26: ; |
| 27: ; |
| 28: add w to ; |
| 29: ; |
| 30: u = ; |
| 31: add u to ; |
| 32: return(u, ); |
3.2. Analysis of Vertex Disjoint Path Construction Algorithm
3.3. Application Examples
4. Restricted Connectivity of BCCC
- Case 1. .
- Subcase 1.1. .
- Subcase 1.1.1. u is .
- Subcase 1.1.1.1. .
- Subcase 1.1.1.2. .
- Subcase 1.1.2. u is .
- Subcase 1.2. .
- Subcase 2. .
5. Fault-Free Routing Algorithm of under the Restricted Connectivity
5.1. Algorithm Description and Implementation
| Algorithm 2 Fault-free routing algorithm of . |
| Input: Given the graph G to represent , a set of fault vertices , two different vertices u and v. The subgraph in which u is located, subgraph in which v is located. |
| Output: A fault-free path from vertex u to v in . |
| 1: function BCCFTP(u,v,,,F,) |
| 2: if then |
| 3: Return BCTP(u,v,,F); |
| 4: else if () then |
| 5: Return(u,v); |
| 6: (), , ; |
| 7: , |
| 8: if then |
| 9: if then |
| 10: PATHSEQ(u, F, , ); |
| 11: let s be the last vertex of ; |
| 12: if then |
| 13: return ; |
| 14: return(, BCTP(s,v,, ); |
| 15: else if then |
| 16: PATHSEQ(v, F, , ); |
| 17: let s be the last vertex of ; |
| 18: if then |
| 19: return ; |
| 20: return(BCTP(u, s, , F), ); |
| 21: else && |
| 22: PATHSEQ(u, F, , ); |
| 23: let s be the last vertex of ; |
| 24: if then |
| 25: return ; |
| 26: +=BCTP(s, v, , ); |
| 27: return ; |
| 28: else if then |
| 29: return(BCTP(u, v, , ). |
| 30: else |
| 31: PATHSEQ(u, F, , ); |
| 32: let s be the last vertex of ; |
| 33: PATHSEQ(v, F, , ); |
| 34: let t be the last vertex of ; |
| 35: if w be the first common vertex of and then |
| 36: return ((, u, w),(, w, v)); |
| 37: +=BCTP(s, t, , F); |
| 38: return + ; |
| 39: |
| 40: function PATHSEQ(u, F, , ) |
| 41: if then |
| 42: if then |
| 43: select one fault-free vertex x from ; |
| 44: return(u, x); |
| 45: else |
| 46: for all do |
| 47: if then |
| 48: for all do |
| 49: if then |
| 50: for all do |
| 51: if then |
| 52: select one fault-free vertex from ; |
| 53: return(u, , , , ) |
| 54: else |
| 55: Select a vertex connected to other subgraphs, select a vertex in the same type A switch, and a vertex in the same type B switch from ; |
| 56: if then |
| 57: select one fault-free vertex from ; |
| 58: return(u, , ); |
| 59: if then |
| 60: for all do |
| 61: if then |
| 62: for all do |
| 63: select one fault-free vertex from ; |
| 64: return(u, , , ); |
| 65: for all do |
| 66: if then |
| 67: for all do |
| 68: if then |
| 69: for all do |
| 70: select one fault-free vertex from ; |
| 71: return(u, , , , ); |
| 72: |
| 73: function BCTP(u, v, , F) |
| 74: Select a fault free path from in ; |
5.2. Analysis of Fault-Free Unicast Algorithm
6. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ghemawat, S.; Gobioff, H.; Leung, S.T. The Google file system. In Proceedings of the Nineteenth ACM Symposium on Operating Systems Principles, Bolton Landing, NY, USA, 19–22 October 2003; pp. 29–43. [Google Scholar]
- Chang, F.; Dean, J.; Ghemawat, S.; Hsieh, W.C.; Wallach, D.A.; Burrows, M.; Chandra, T.; Fikes, A.; Gruber, R.E. Bigtable: A distributed storage system for structured data. ACM Trans. Comput. Syst. (TOCS) 2008, 26, 1–26. [Google Scholar] [CrossRef]
- Isard, M.; Budiu, M.; Yu, Y.; Birrell, A.; Fetterly, D. Dryad: Distributed data-parallel programs from sequential building blocks. In Proceedings of the 2nd ACM SIGOPS/EuroSys European Conference on Computer Systems 2007, Lisboa, Portugal, 21–23 March 2007; pp. 59–72. [Google Scholar]
- Li, Z.; Guo, Z.; Yang, Y. BCCC: An expandable network for data centers. In Proceedings of the Tenth ACM/IEEE Symposium on Architectures for Networking and Communications Systems, Marina del Rey, CA, USA, 20–21 October 2014; pp. 77–88. [Google Scholar]
- Castillo, A.C. BCube Connected Crossbar and GBC3 Network Architecture: An Overview. In Proceedings of the 2022 31st Conference of Open Innovations Association (FRUCT), Helsinki, Finland, 27–29 April 2022; pp. 37–44. [Google Scholar]
- Li, X.Y.; Lin, W.; Liu, X.; Lin, C.K.; Pai, K.J.; Chang, J.M. Completely independent spanning trees on BCCC data center networks with an application to fault-tolerant routing. IEEE Trans. Parallel Distrib. Syst. 2021, 33, 1939–1952. [Google Scholar] [CrossRef]
- He, X.; Zhang, Q.; Han, Z. The Hamiltonian of Data Center Network BCCC. In Proceedings of the 2018 IEEE 4th International Conference on Big Data Security on Cloud (BigDataSecurity), IEEE International Conference on High Performance and Smart Computing,(HPSC) and IEEE International Conference on Intelligent Data and Security (IDS), Omaha, NE, USA, 3–5 May 2018; pp. 147–150. [Google Scholar]
- Han, Z.; Zhang, W. A summary of the BCCC data center network topology. In Proceedings of the 2018 IEEE 4th International Conference on Big Data Security on Cloud (BigDataSecurity), IEEE International Conference on High Performance and Smart Computing, (HPSC) and IEEE International Conference on Intelligent Data and Security (IDS), Omaha, NE, USA, 3–5 May 2018; pp. 270–272. [Google Scholar]
- Harary, F. Conditional connectivity. Networks 1983, 13, 347–357. [Google Scholar] [CrossRef]
- Esfahanian, A.H. Generalized measures of fault tolerance with application to n-cube networks. IEEE Trans. Comput. 1989, 38, 1586–1591. [Google Scholar] [CrossRef]
- Li, X.; Zhou, S.; Ma, T.; Guo, X.; Ren, X. The h-Restricted Connectivity of a Class of Hypercube-Based Compound Networks. Comput. J. 2022, 65, 2528–2534. [Google Scholar] [CrossRef]
- Cheng, D. The h-restricted connectivity of balanced hypercubes. Discret. Appl. Math. 2021, 305, 133–141. [Google Scholar] [CrossRef]
- Li, X.; Zhou, S.; Guo, X.; Ma, T. The h-restricted connectivity of the generalized hypercubes. Theor. Comput. Sci. 2021, 850, 135–147. [Google Scholar] [CrossRef]
- Liu, X.; Meng, J. The k-restricted edge-connectivity of the data center network DCell. Appl. Math. Comput. 2021, 396, 125941. [Google Scholar] [CrossRef]
- Lin, L.; Huang, Y.; Wang, X.; Xu, L. Restricted connectivity and good-neighbor diagnosability of split-star networks. Theor. Comput. Sci. 2020, 824, 81–91. [Google Scholar] [CrossRef]
- Wang, S. The r-Restricted Connectivity of Hyper Petersen Graphs. IEEE Access 2019, 7, 109539–109543. [Google Scholar] [CrossRef]
- Ma, T.; Wang, J.; Zhang, M. The restricted edge-connectivity of Kronecker product graphs. Parallel Process. Lett. 2019, 29, 1950012. [Google Scholar] [CrossRef]
- Wu, S.; Fan, J.; Cheng, B.; Yu, J.; Wang, Y. Connectivity and constructive algorithms of disjoint paths in dragonfly networks. Theor. Comput. Sci. 2022, 922, 257–270. [Google Scholar] [CrossRef]
- Kern, W.; Martin, B.; Paulusma, D.; Smith, S.; van Leeuwen, E.J. Disjoint paths and connected subgraphs for H-free graphs. Theor. Comput. Sci. 2022, 898, 59–68. [Google Scholar] [CrossRef]
- Hadid, R.; Villain, V. A Self-stabilizing One-To-Many Node Disjoint Paths Routing Algorithm in Star Networks. In Proceedings of the IFIP International Conference on Distributed Applications and Interoperable Systems; Springer: Berlin/Heidelberg, Germany, 2020; pp. 186–203. [Google Scholar]
- Pushparaj, J.; Soumya, J.; Veda Bhanu, P. A link fault tolerant routing algorithm for mesh of tree based network-on-chips. In Proceedings of the 2019 IEEE International Symposium on Smart Electronic Systems (iSES) (Formerly iNiS), Rourkela, India, 16–18 December 2019; pp. 181–184. [Google Scholar]
- Nehnouh, C.; Senouci, M. A New Fault Tolerant Routing Algorithm for Networks on Chip. Int. J. Embed.-Real-Time Commun. Syst. (IJERTCS) 2019, 10, 68–85. [Google Scholar] [CrossRef]
- Zhang, Y.; Fan, W.; Han, Z.; Song, Y.; Wang, R. Fault-tolerant routing algorithm based on disjoint paths in 3-ary n-cube networks with structure faults. J. Supercomput. 2021, 77, 13090–13114. [Google Scholar] [CrossRef]
- Thuan, B.T.; Ngoc, L.B.; Kaneko, K. A stochastic link-fault-tolerant routing algorithm in folded hypercubes. J. Supercomput. 2018, 74, 5539–5557. [Google Scholar] [CrossRef]
- Ipek, A.; Tosun, S.; Ozdemir, S. HAFTA: Highly adaptive fault-tolerant routing algorithm for two-dimensional network-on-chips. Concurr. Comput. Pract. Exp. 2021, 33, e6378. [Google Scholar] [CrossRef]
- Li, D.; Guo, C.; Wu, H.; Tan, K.; Zhang, Y.; Lu, S. FiConn: Using backup port for server interconnection in data centers. In Proceedings of the IEEE INFOCOM 2009, Rio de Janeiro, Brazil, 19–25 April 2009; pp. 2276–2285. [Google Scholar]
- Guo, D.; Chen, T.; Li, D.; Li, M.; Liu, Y.; Chen, G. Expandable and cost-effective network structures for data centers using dual-port servers. IEEE Trans. Comput. 2012, 62, 1303–1317. [Google Scholar]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, J.; Du, X.; Li, H.; Han, Z. BCCC Disjoint Path Construction Algorithm and Fault-Tolerant Routing Algorithm under Restricted Connectivity. Algorithms 2022, 15, 481. https://doi.org/10.3390/a15120481
Lu J, Du X, Li H, Han Z. BCCC Disjoint Path Construction Algorithm and Fault-Tolerant Routing Algorithm under Restricted Connectivity. Algorithms. 2022; 15(12):481. https://doi.org/10.3390/a15120481
Chicago/Turabian StyleLu, Jialiang, Xiaoyu Du, Huiping Li, and Zhijie Han. 2022. "BCCC Disjoint Path Construction Algorithm and Fault-Tolerant Routing Algorithm under Restricted Connectivity" Algorithms 15, no. 12: 481. https://doi.org/10.3390/a15120481
APA StyleLu, J., Du, X., Li, H., & Han, Z. (2022). BCCC Disjoint Path Construction Algorithm and Fault-Tolerant Routing Algorithm under Restricted Connectivity. Algorithms, 15(12), 481. https://doi.org/10.3390/a15120481