
A Safety Prediction System for Lunar Orbit Rendezvous and Docking Mission

Abstract
1. Introduction
2. Mission Objectives and Characteristics
2.1. Mission Objectives
- Image feature detection and matching in uncertain environments. It needs to use image information to capture the target and extract related feature points, and further calculate the relative position and attitude of the two spacecraft;
- Safety prediction and judgment of the docking process. It needs to construct a knowledge base for safety judgments, predict the possible docking process in the current pose and evaluate the probability of successful docking;
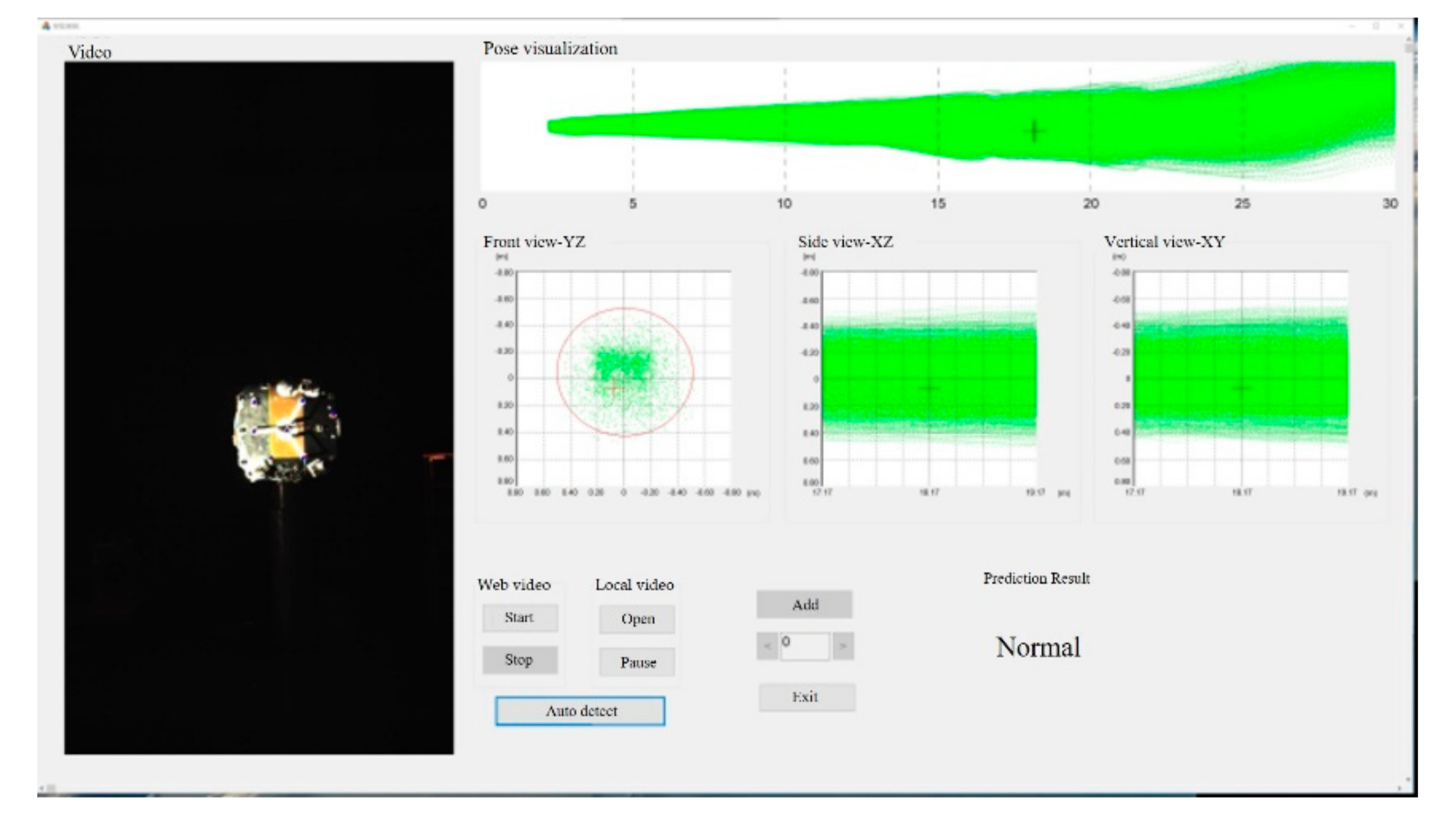
- Visualized data to assist flight controllers in carrying out status analysis and mission decision-making. It is not only necessary to output the rendezvous safety judgment result, but also to visually display the safety judgment basis and criteria.
2.2. Mission Characteristics
3. Human–Machine Collaborative Self-Judgment Framework for Safety of RVD
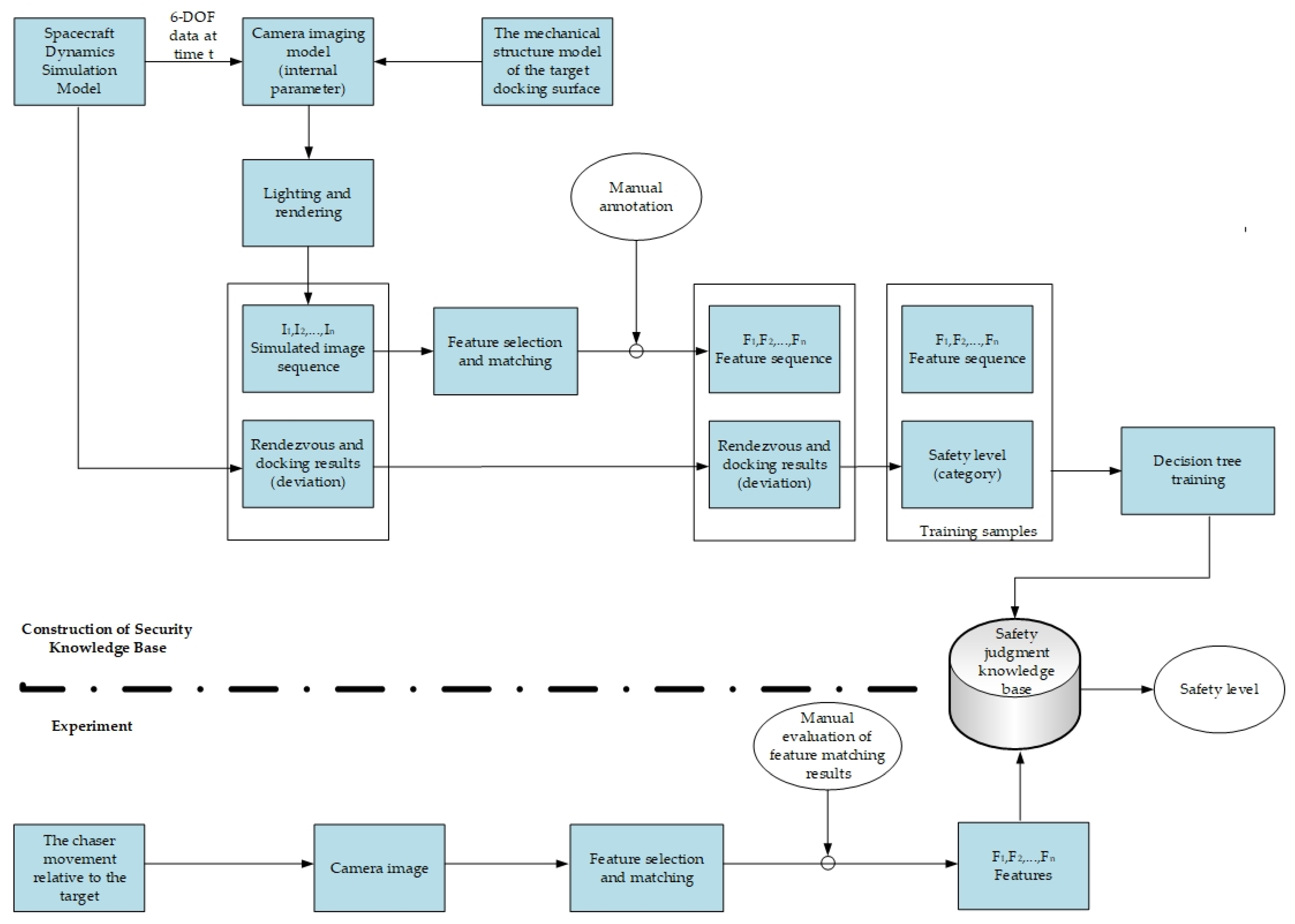
3.1. System Framework Design
3.2. Feature Selection and Matching of the Target Image
- Manually select several positions on the mechanical structure model of the end face of the target. These positions have precise coordinates on the mechanical structure drawing and can be extracted using the Scale-Invariant Feature Transform (SIFT) features [29];
- Convert the position specified on the mechanical structure drawing to the (sub) pixel position on the simulated image by using the rotation matrix and displacement vector generated by the dynamics model;
- Extract the SIFT features from the real images collected in the test environment and the simulated images, and form feature point pairs;
- In the construction stage of the safety knowledge base, the features on the images collected by the surveillance cameras are clustered, and the feature cluster centers are matched with the features on the simulated images. Then, the matching results are manually detected, and the false matches are deleted. Since the safety level corresponding to the simulated image can be obtained from the dynamics model, the label for the manually detected features can be obtained, which is the same as the matched simulated image. With the features and label, we can construct several training samples. Then, decision tree methods are used to construct a knowledge base. An example of the feature points is shown in Figure 3;
- In the test stage, we first collect images using the surveillance camera, and then extract features and cluster them. After that, we manually detect the number of clusters and the degree of feature aggregation within the cluster and select the cluster centers. Finally, we obtain the safety level by inputting the filtered cluster centers into the decision tree.
3.3. Safety Judgment Knowledge Base
3.3.1. The Classification of Safety Levels
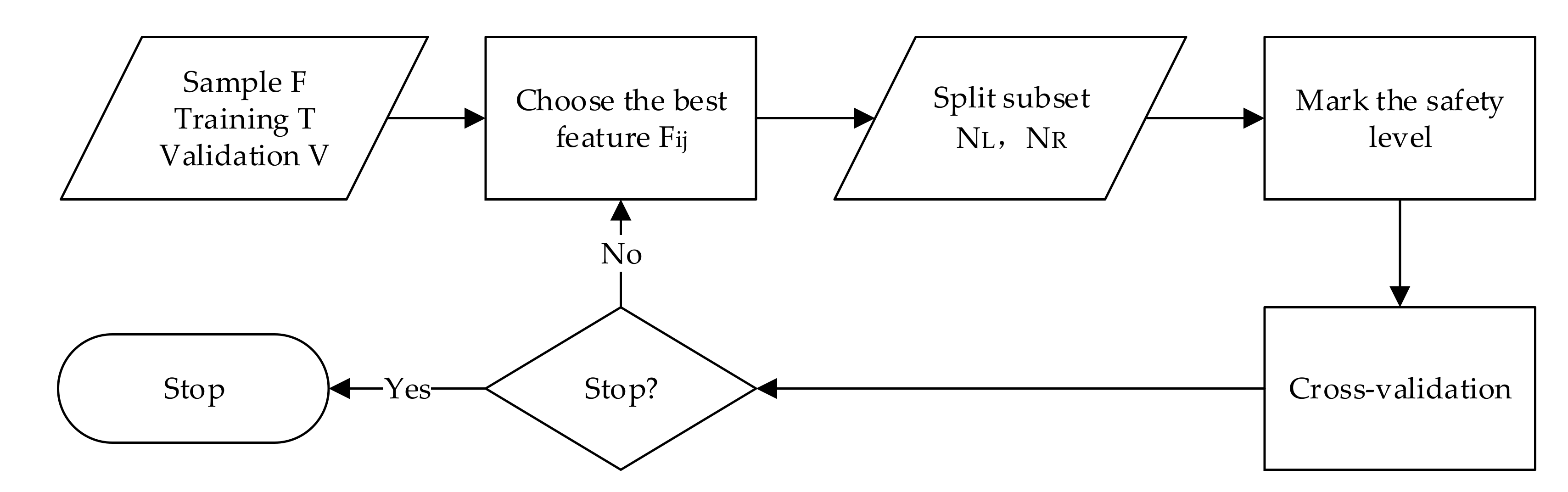
3.3.2. Training of Decision Trees
4. System Verification Process
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhu, R.Z.; Wang, H.F.; Cong, Y.T.; Wang, R. Comparative Study of Chinese and Foreign Rendezvous and Docking Technologies. Spacecr. Eng. 2013, 22, 8–15. [Google Scholar]
- Fehse, W. Automated Rendezvous and Docking for Spacecraft; Cambridge University Press: New York, NY, USA, 2003; pp. 1–7. [Google Scholar]
- Woffinden, D.C.; Geller, D.K. Navigating the Road to Autonomous Orbital Rendezvous. J. Spacecr. Rockets. 2007, 44, 898–909. [Google Scholar] [CrossRef]
- Wang, Z.H.; Chen, Z.H.; Zhang, G.F.; Zhang, H.X. Automatic Test of Space Rendezvous and Docking GNC Software. In Proceedings of the 2012 International Conference on Information Technology and Software Engineering, Beijing, China, 8–10 December 2012; pp. 81–92. [Google Scholar]
- Dong, H.; Hu, Q.; Akella, M.R. Safety Control for Spacecraft Autonomous Rendezvous and Docking Under Motion Constraints. J. Guid. Control Dyn. 2017, 40, 1680–1692. [Google Scholar] [CrossRef]
- Guglieri, G.; Maroglio, F.; Pellegrino, P.; Torre, L. Design and Development of Guidance Navigation and Control Algorithms for Spacecraft Rendezvous and Docking Experimentation. Acta Astronaut. 2014, 94, 395–408. [Google Scholar] [CrossRef]
- Bucchioni, G.; Innocenti, M. Rendezvous in Cis-Lunar Space near Rectilinear Halo Orbit: Dynamics and Control Issues. Aerospace 2021, 8, 68. [Google Scholar] [CrossRef]
- Bucci, L.; Colagrossi, A.; Lavagna, M. Rendezvous in Lunar near Rectilinear Halo Orbits. Adv. Astronaut. Sci. Technol. 2018, 1, 39–43. [Google Scholar] [CrossRef][Green Version]
- Colagrossi, A.; Pesce, V.; Bucci, L.; Colombi, F.; Lavagna, M. Guidance, Navigation and Control for 6DOF Rendezvous in Cislunar Multi-Body Environment. Aerosp. Sci. Technol. 2021, 114, 106751. [Google Scholar] [CrossRef]
- Muñoz, S.; Christian, J.; Lightsey, E.G. Development of an End to End Simulation Tool for Autonomous Cislunar Navigation. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Chicago, IL, USA, 10–13 August 2009; pp. 1–21. [Google Scholar]
- D’Souza, C.; Crain, T.; Clark, F.; Getchius, J. Orion Cislunar Guidance and Navigation. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Hilton Head, SC, USA, 20–23 August 2007; pp. 1–21. [Google Scholar]
- Hablani, H.B.; Tapper, M.L.; Dana-Bashian, D.J. Guidance and Relative Navigation for Autonomous Rendezvous in A Circular Orbit. J. Guid. Control Gyn. 2002, 25, 553–562. [Google Scholar] [CrossRef]
- Ariba, Y.; Arzelier, D.; Urbina, L.S.; Louembet, C. V-bar and R-bar Glideslope Guidance Algorithms for Fixed-Time Rendezvous: A Linear Programming Approach. IFAC Papaers Online 2016, 49, 385–390. [Google Scholar] [CrossRef]
- Ghosh Dastidar, R. On the Advantages and Limitations of Sliding Mode Control for Spacecraft. In Proceedings of the AIAA SPACE 2010 Conference & Exposition, Anaheim, CA, USA, 30 August–2 September 2010; p. 8777. [Google Scholar]
- Lopez, I.; Mclnnes, C.R. Autonomous Rendezvous Using Artificial Potential Function Guidance. J. Guid. Control Gyn. 1995, 18, 237–241. [Google Scholar] [CrossRef]
- Kim, Y.H.; Spencer, D.B. Optimal Spacecraft Rendezvous Using Genetic Algorithms. J. Spacecr. Rocket. 2002, 39, 859–865. [Google Scholar] [CrossRef]
- Francis, G.; Collins, E.; Chuy, O.; Sharma, A. Sampling-Based Trajectory Generation for Autonomous Spacecraft Rendezvous and Docking. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Boston, MA, USA, 19–22 August 2013; p. 4549. [Google Scholar]
- Mammarella, M.; Capello, E.; Guglieri, G. Robust Model Predictive Control for Automated Rendezvous Maneuvers in Near-Earth and Moon Proximity. In Proceedings of the 2018 AIAA SPACE and Astronautics Forum and Exposition, Orlando, FL, USA, 17–19 September 2018; p. 5343. [Google Scholar]
- Hao, G.T.; Du, X.P.; Zhao, J.G.; Song, J.J. Relative Pose Estimation of No cooperative Target Based on Fusion of Monocular Vision and Scanner less 3D LIDAR. J. Astronaut. 2015, 36, 1178–1186. [Google Scholar]
- Bujnak, M.; Kukelova, Z.; Pajdla, T. A General Solution to the P4P Problem for Camera with Unknown Focal Length. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Anchorage, AK, USA, 24–26 June 2008; pp. 1–8. [Google Scholar]
- Wu, F.C.; Wang, Z.H.; Hu, Z.Y. Cayley Transformation and Numerical Stability of Calibration Equation. Int. J. Comput. Vis. 2009, 82, 156–184. [Google Scholar] [CrossRef]
- Lepetit, V.; Moreno-Noguer, F.; Fua, P. EPnP: An Accurate O(n) Solution to the PnP Problem. Int. J. Comput. Vis. 2009, 81, 156–166. [Google Scholar] [CrossRef]
- Zhang, S.J.; Cao, X.B.; Zhang, F.; He, L. Monocular Vision Algorithm of Three Dimensional Position and Attitude Localization Based on Feature Points. Sci. China-Inf. Sci. 2010, 40, 591–604. [Google Scholar]
- Zhou, J.; Bai, B.; Yu, X.Z. A New Method of Relative Position and Attitude Determination for Non-Cooperative Target. J. Astronaut. 2011, 32, 516–521. [Google Scholar]
- Mafi, M.; Martin, H.; Cabrerizo, M.; Andrian, J.; Barreto, A.; Adjouadi, M. A Comprehensive Survey on Impulse and Gaussian Denoising Filters for Digital Images. Signal Process. 2019, 157, 236–260. [Google Scholar] [CrossRef]
- Tian, C.; Xu, Y.; Fei, L.; Yan, K. Deep Learning for Image Denoising: A Survey. In Proceedings of the Twelfth International Conference on Genetic and Evolutionary Computing, Changzhou, China, 14–17 December 2018; pp. 563–572. [Google Scholar]
- Wertz, J.R.; Bell, R. Autonomous Rendezvous and Docking Technologies: Status and Prospects. In Space Systems Technology and Operations; International Society for Optics and Photonics: Orlando, FL, USA, 2003; pp. 20–30. [Google Scholar]
- Zhang, R.W. Satellite Orbit Attitude Dynamics and Control; Beijing University of Aeronautics and Astronautics Press: Beijing, China, 1998; pp. 297–302. [Google Scholar]
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
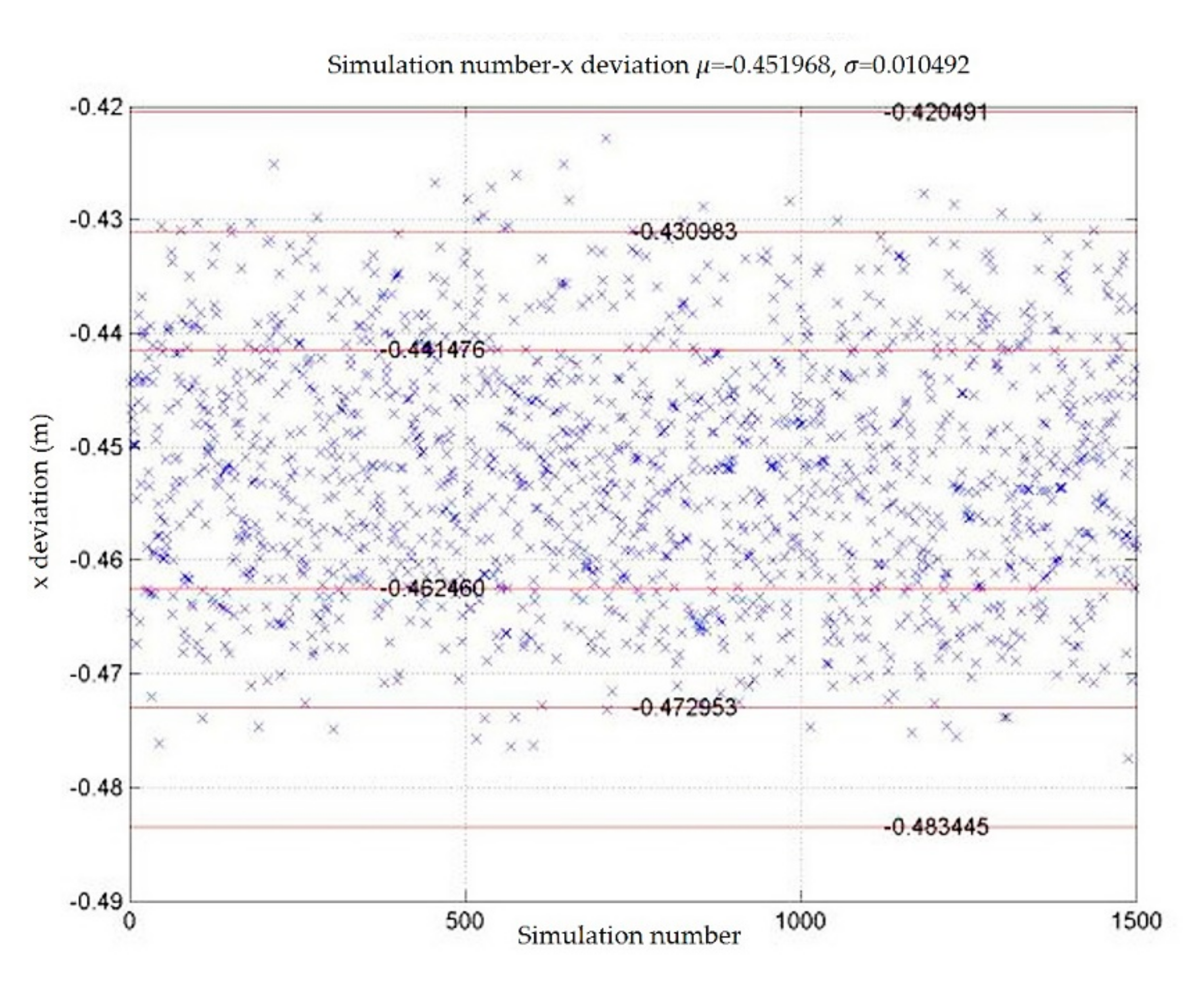
| 6-DOF Deviations | Mean | Standard Deviation |
|---|---|---|
| 0.452 m | 0.010 m | |
| 0.371 m | 0.007 m | |
| 0.019 m | 0.007 m | |
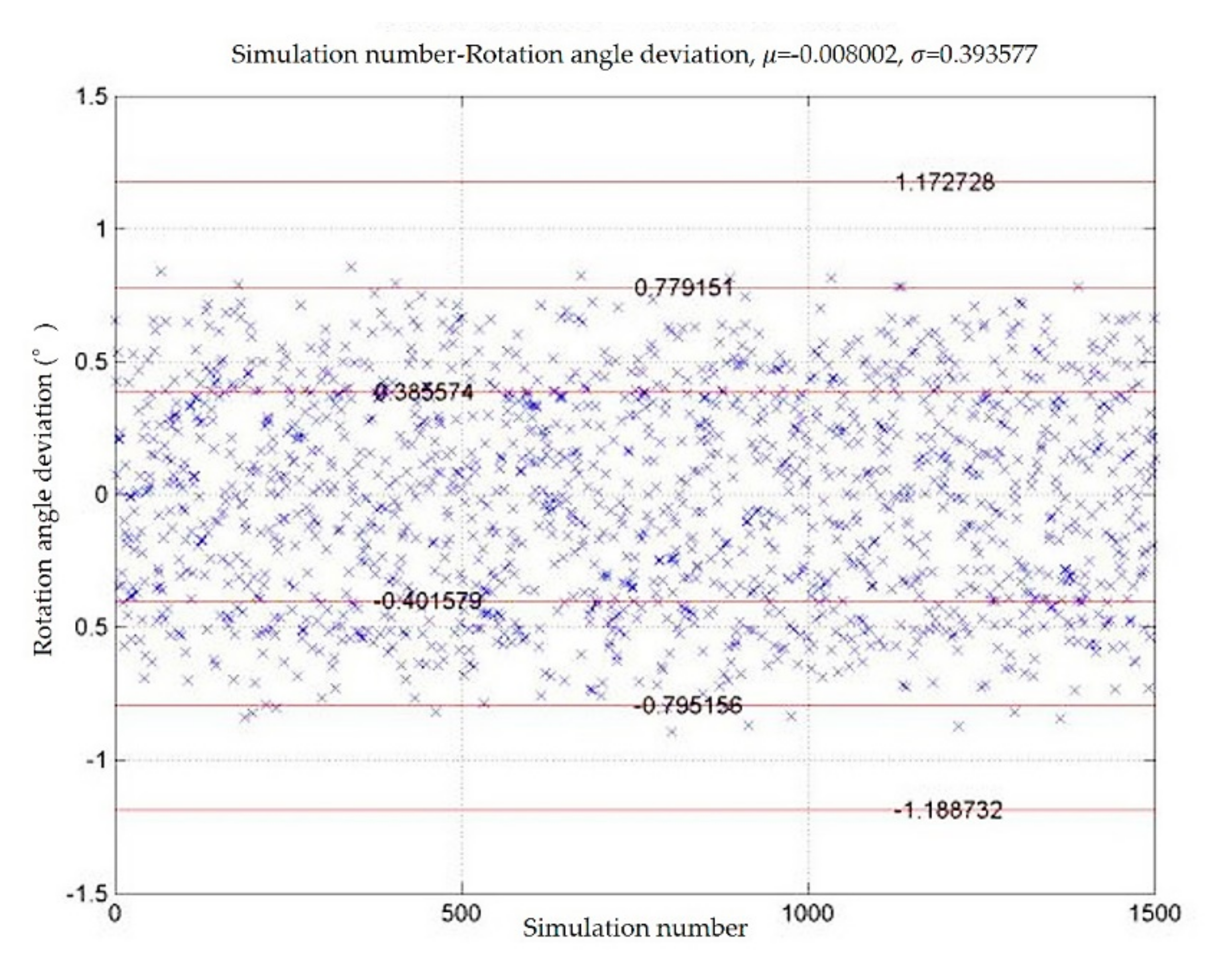
| 0.021° | 0.400 | |
| 0.008° | 0.393 | |
| 0.239 | 0.201 |
| Confusion Matrix | L = 1 | L = 2 | L = 3 | L = 4 |
|---|---|---|---|---|
| L = 1 | 86 | 3 | 0 | 0 |
| L = 2 | 2 | 32 | 3 | 0 |
| L = 3 | 0 | 0 | 17 | 1 |
| L = 4 | 0 | 0 | 0 | 6 |
| Number of Test | L = 1 | L = 2 | L = 3 | L = 4 |
|---|---|---|---|---|
| 50 | 45(90.0%) | 2(4.0%) | 3(6.0%) | 0(0%) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, D.; Liu, P.; Qiao, D.; Tang, X. A Safety Prediction System for Lunar Orbit Rendezvous and Docking Mission. Algorithms 2021, 14, 188. https://doi.org/10.3390/a14060188
Yu D, Liu P, Qiao D, Tang X. A Safety Prediction System for Lunar Orbit Rendezvous and Docking Mission. Algorithms. 2021; 14(6):188. https://doi.org/10.3390/a14060188
Chicago/Turabian StyleYu, Dan, Peng Liu, Dezhi Qiao, and Xianglong Tang. 2021. "A Safety Prediction System for Lunar Orbit Rendezvous and Docking Mission" Algorithms 14, no. 6: 188. https://doi.org/10.3390/a14060188
APA StyleYu, D., Liu, P., Qiao, D., & Tang, X. (2021). A Safety Prediction System for Lunar Orbit Rendezvous and Docking Mission. Algorithms, 14(6), 188. https://doi.org/10.3390/a14060188