
Autoencoder-Based Reduced Order Observer Design for a Class of Diffusion-Convection-Reaction Systems


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Problem Statement
3. Model-Oder Reduction
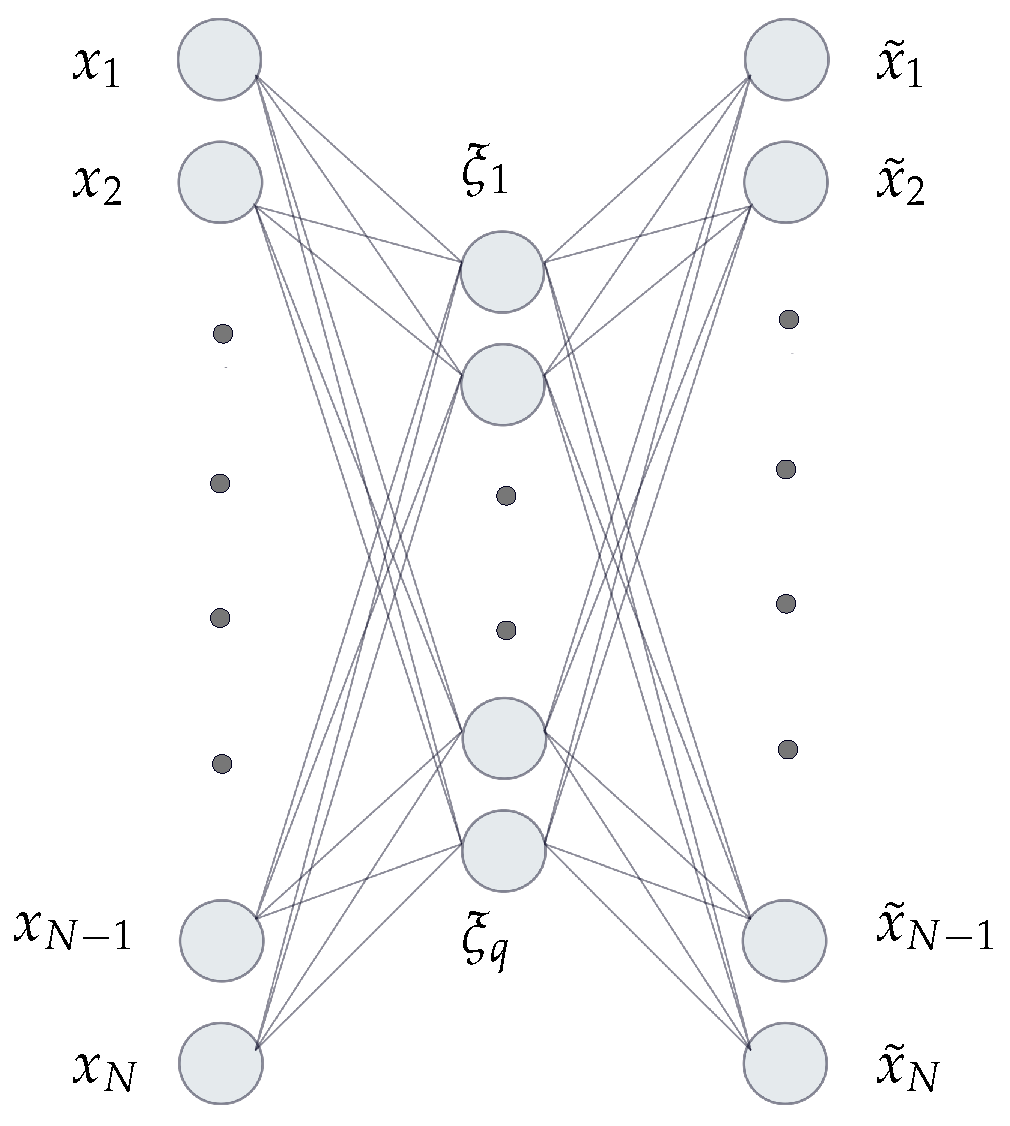
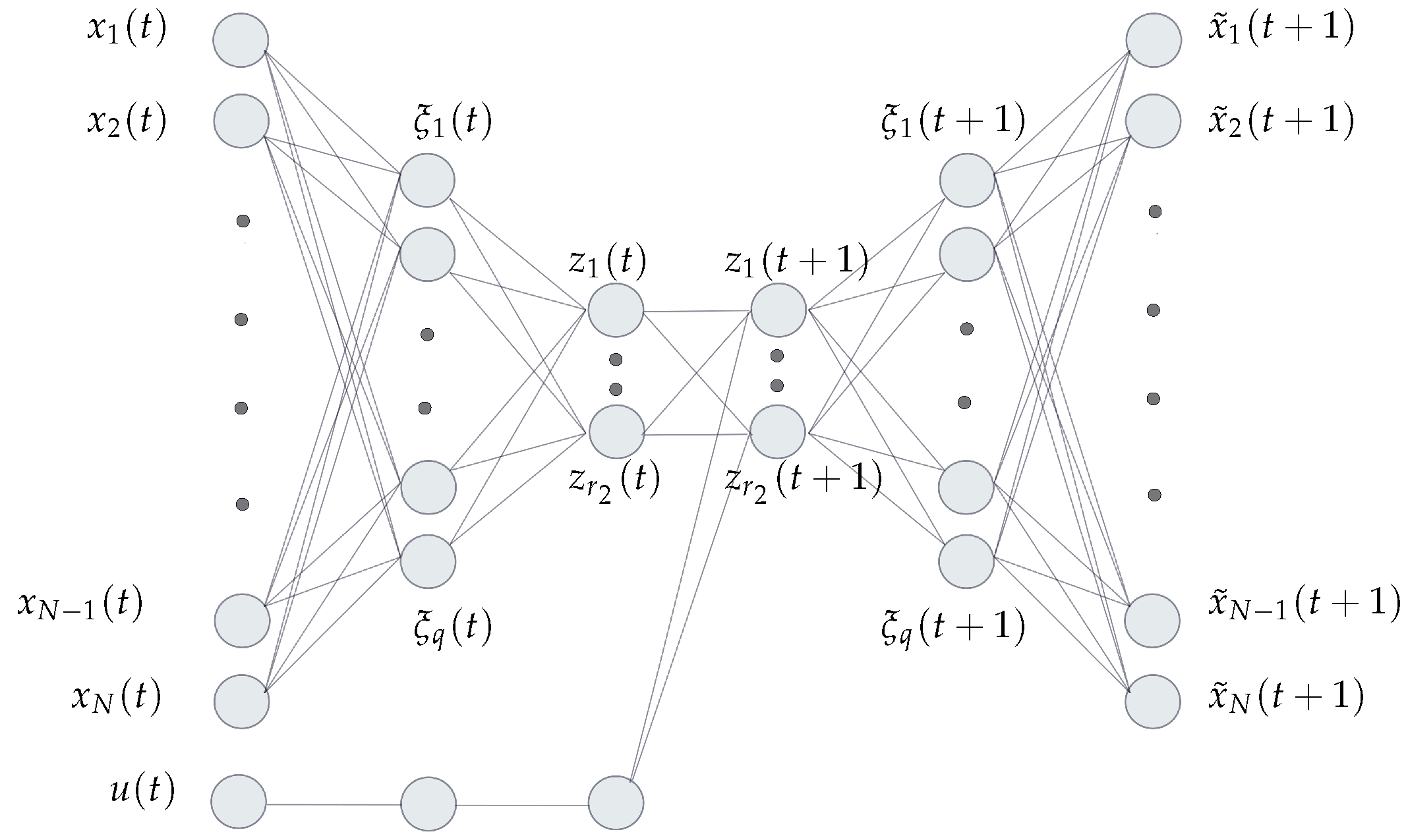
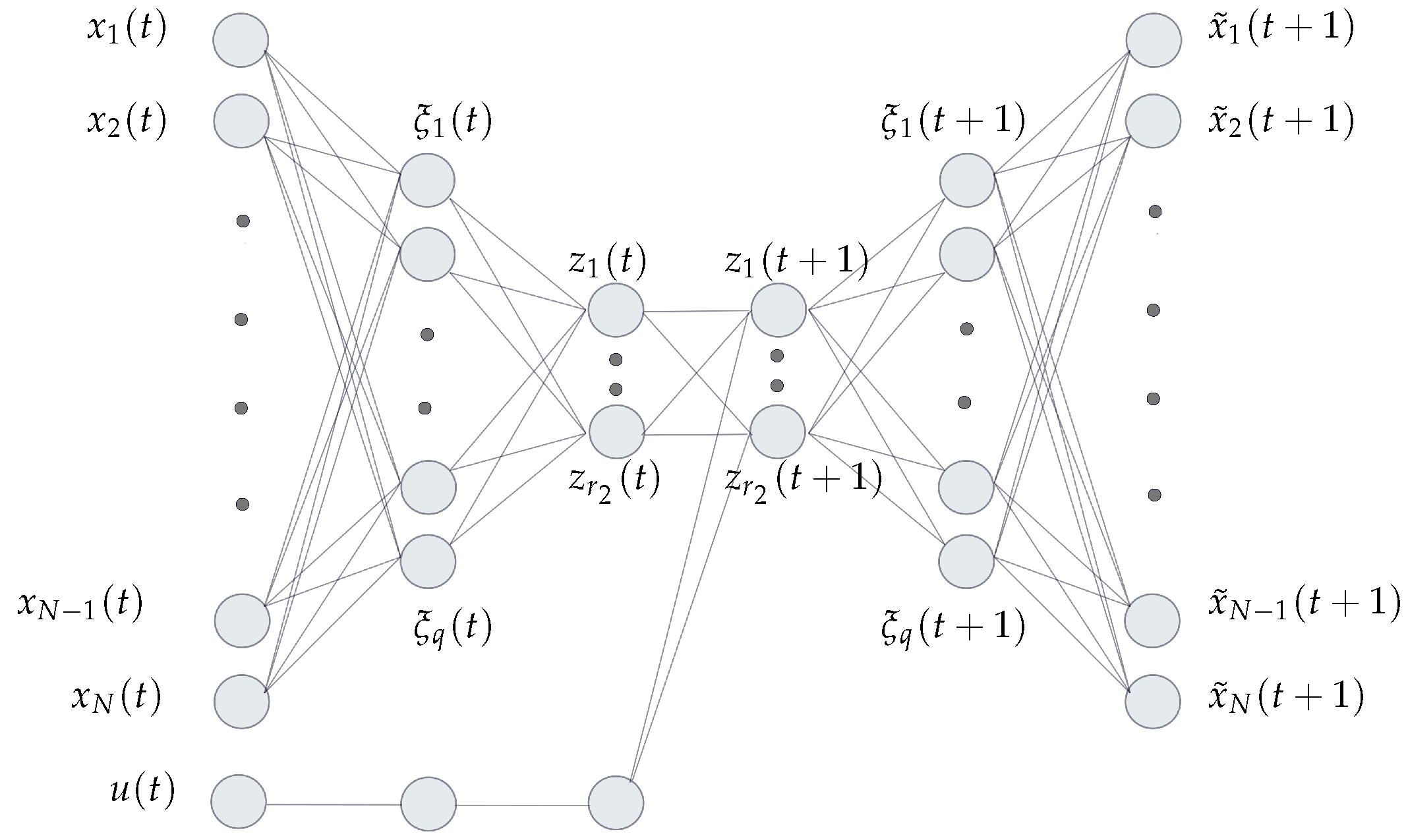
3.1. Machine Learning for Koopman Basis Identification
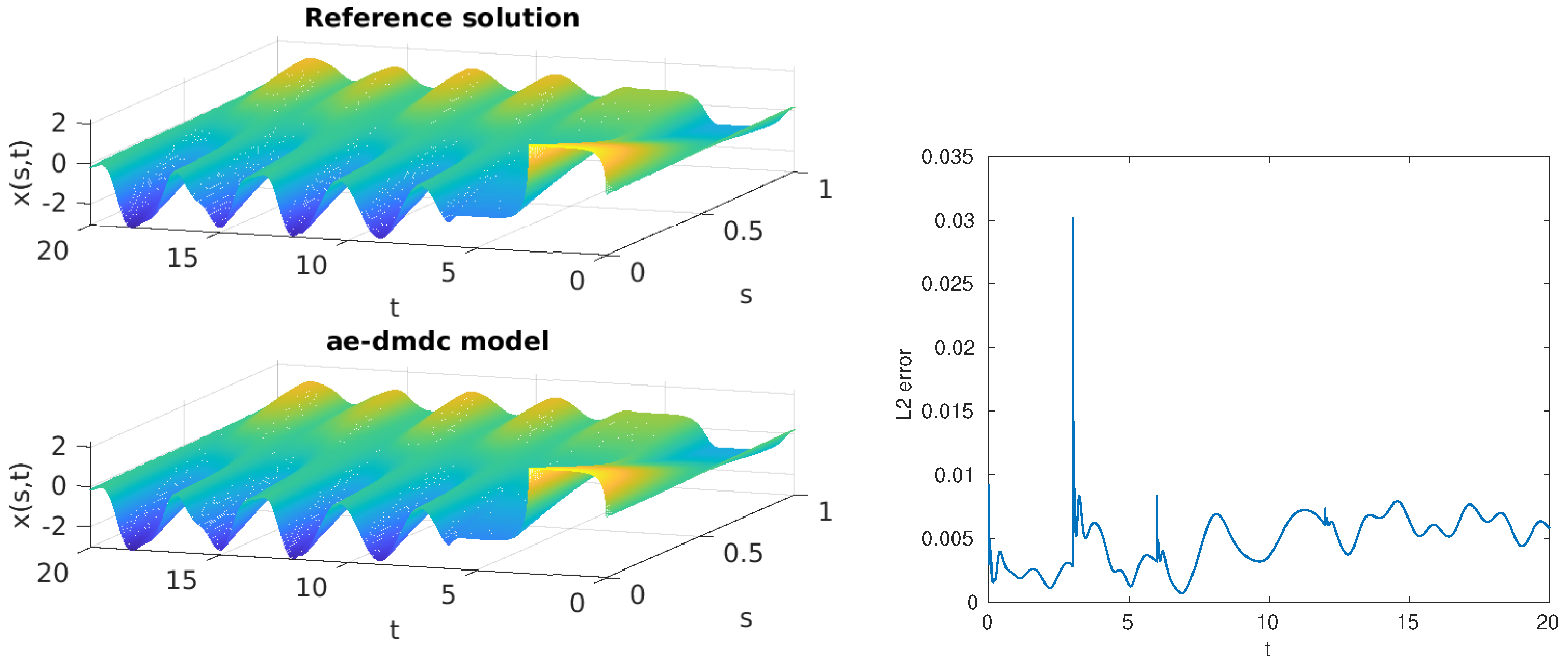
3.2. Reduced Model Based DMDc
4. Full State Reconstruction Using the Ae-Dmdc Reduced-Order Model
4.1. Reduced-Order Observer
4.2. Kalman Filter
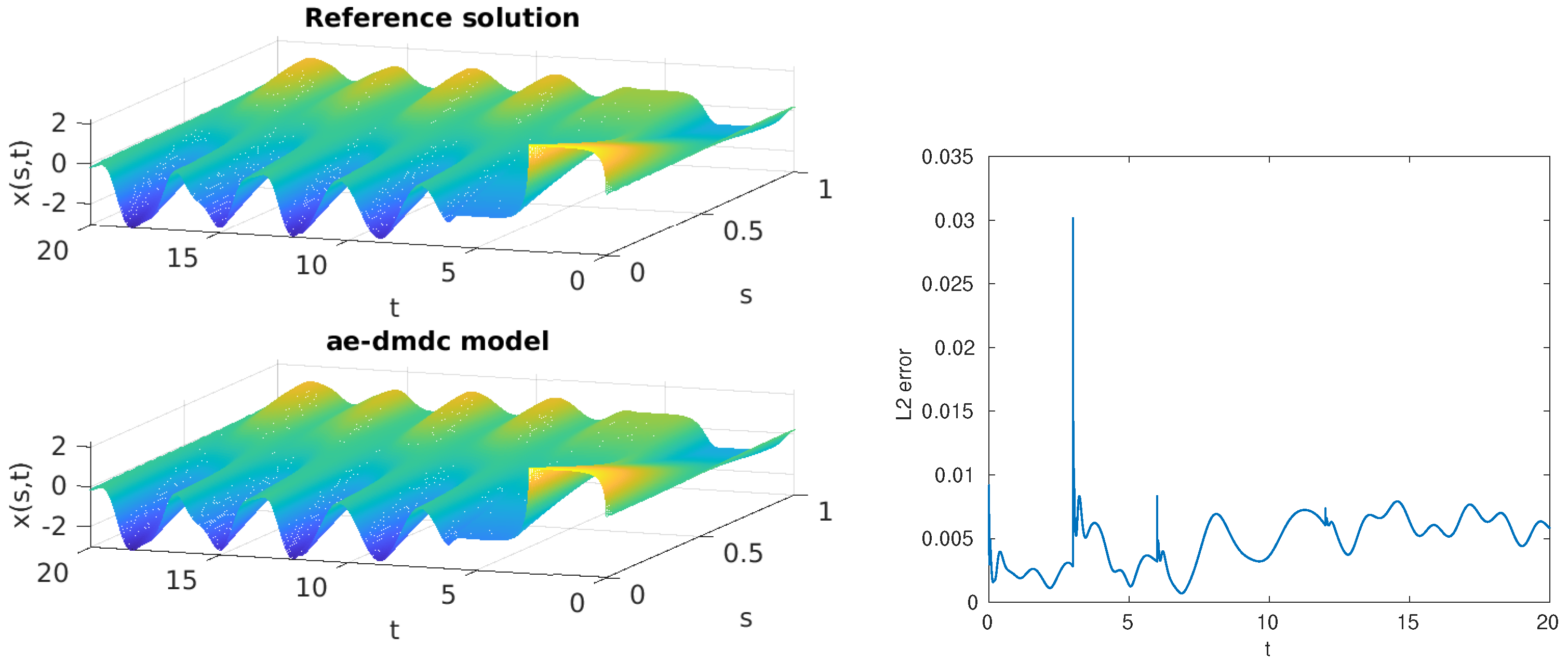
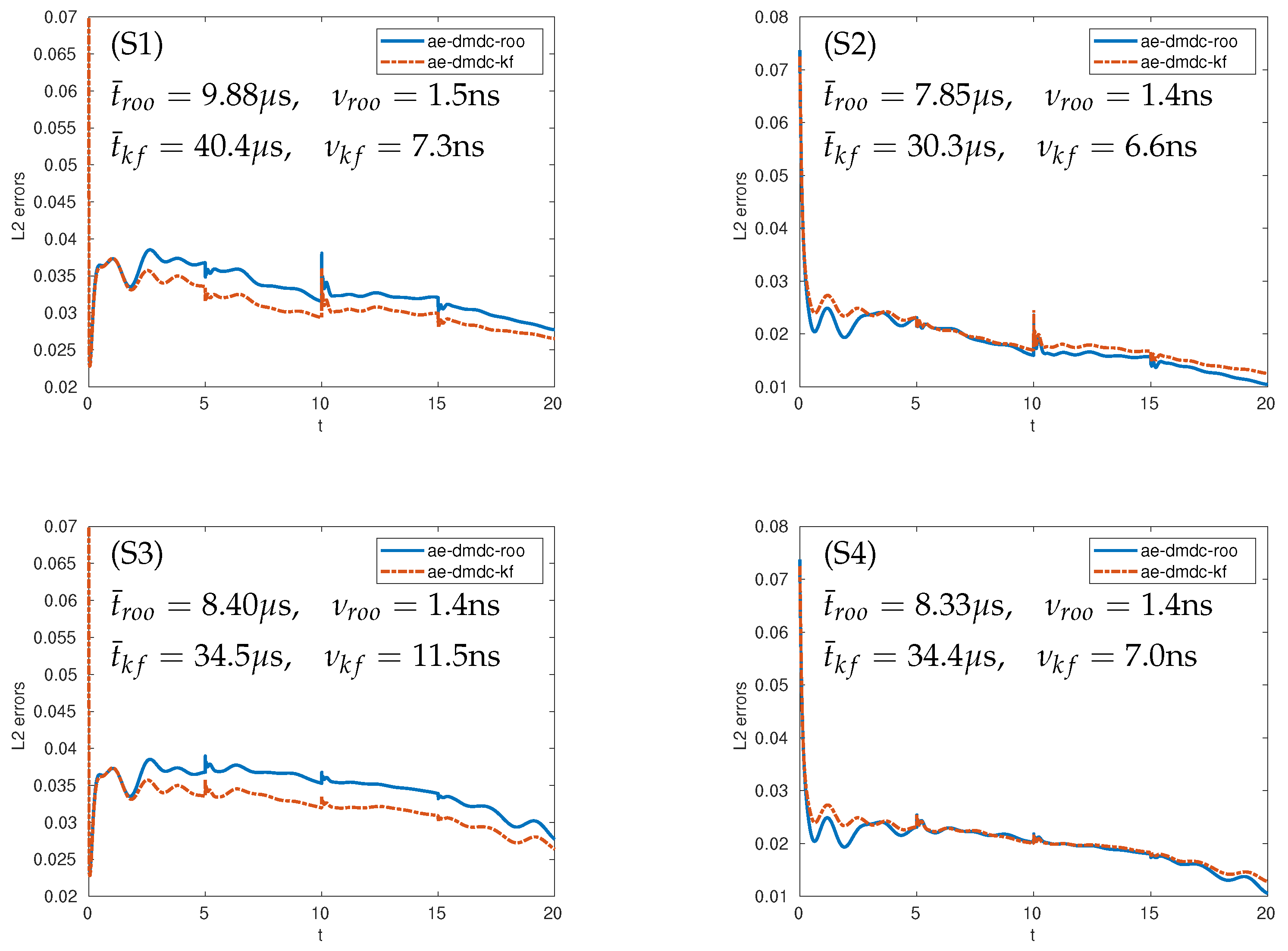
4.3. Observer Evaluation
- (S1)
- and , (S2) and
- (S3)
- and , (S4) and .
5. Discussion
6. Conclusions and Outlook
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Tubular Reactor Model
References
- Luenberger, D.G. Observing the state of a linear system. IEEE Trans. Milit. Elect. 1964, 8, 74–80. [Google Scholar] [CrossRef]
- Luenberger, D.G. An introduction to observers. IEEE Trans. Autom. Control 1971, 16, 596–602. [Google Scholar] [CrossRef]
- Otto, S.E.; Rowley, C.W. Koopman Operators for Estimation and Control of Dynamical Systems. Annu. Rev. Control Robot. Auton. Syst. 2021, 4, 59–87. [Google Scholar] [CrossRef]
- Curtain, R.F.; Zwart, H. An Introduction to Infinite-Dimensional Linear Systems Theory; Springer: New York, NY, USA, 1995. [Google Scholar]
- Krstic, M.; Smyshlyaev, A. Boundary Control of PDEs: A Course on Backstepping Designs; SIAM: Philadelphia, PA, USA, 2008. [Google Scholar]
- Schaum, A.; Moreno, J.A.; Alvarez, J.; Meurer, T. A simple observer scheme for a class of 1-D semi-linear parabolic distributed parameter systems. In Proceedings of the 2015 European Control Conference, Linz, Austria, 15–17 July 2015; pp. 49–54. [Google Scholar]
- Schaum, A.; Alvarez, J.; Meurer, T.; Moreno, J.A. State-estimation for a class of tubular reactors using a pointwise innovation scheme. J. Proc. Control 2017, 60, 104–114. [Google Scholar] [CrossRef]
- Schaum, A. An unknown input observer for a class of diffusion-convection-reaction systems. at-Automatisierungstechnik 2018, 66, 548–557. [Google Scholar] [CrossRef]
- Schaum, A. Dissipativity in Control Engineering. Applications to Finite and Infinite Dimensional Systems; DeGruyter: Berlin, Germany, 2021. [Google Scholar]
- Schaum, A.; Koch, S.; Reichhartinger, M.; Meurer, T.; Moreno, J.A.; Horn, M. Nonlinear Observer Design for a 1D Heat Conduction Process. In Proceedings of the 60th IEEE Conference on Decision and Control (CDC), Austin, TX, USA, 13 December 2021. in press. [Google Scholar]
- Brunton, S.L.; Kutz, J.N. Data-Driven Science and Engineering; Cambridge University Press: Cambridge, UK, 2019. [Google Scholar]
- Williams, M.O.; Kevrekidis, I.G.; Rowley, C.W. A Data–Driven Approximation of the Koopman Operator: Extending Dynamic Mode Decomposition. J. Nonlinear Sci. 2015, 25, 1307–1346. [Google Scholar] [CrossRef] [Green Version]
- Proctor, J.L.; Brunton, S.L.; Kutz, J.N. Generalizing Koopman Theory to Allow for Inputs and Control. SIAM J. Appl. Dyn. Syst. 2018, 17, 909–930. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lusch, B.; Kutz, J.N.; Brunton, S.L. Deep learning for universal linear embeddings of nonlinear dynamics. Nat. Commun. 2018, 9, 4950. [Google Scholar] [CrossRef] [PubMed]
- Maksakov, A.; Palis, S. Koopman-based data-driven control for continuous fluidized bed spray granulation with screen-mill-cycle. J. Process Control 2021, 103, 48–54. [Google Scholar] [CrossRef]
- Masti, D.; Bemporad, A. Learning nonlinear state–space models using autoencoders. Automatica 2021, 129, 109666. [Google Scholar] [CrossRef]
- Gomez, D.F.; Lagor, F.D.; Kirk, P.B.; Lind A., H.; Jones, A.R.; Paley, D.A. Data-driven estimation of the unsteady flowfield near an actuated airfoil with embedded pressure sensors. J. Guid. Control Dyn. 2019, 42, 2279. [Google Scholar] [CrossRef]
- Surana, A. Koopman Operator Based Observer Synthesis for Control-Affine Nonlinear Systems. In Proceedings of the IEEE 55th Conference on Decision and Control (CDC), Las Vegas, NV, USA, 12–14 December 2016; pp. 6492–6499. [Google Scholar]
- Surana, A.; Banaszuk, A. Linear observer synthesis for nonlinear systems using Koopman Operator framework. IFAC-PapersOnLine 2016, 49, 716–723. [Google Scholar] [CrossRef]
- Vijayshankar, S.; Nabi, S.; Chakrabarty, A.; Grover, P.; Benosman, M. Dynamic Mode Decomposition and Robust Estimation: Case Study of a 2D Turbulent Boussinesq Flow. In Proceedings of the 2020 American Control Conference, Denver, CO, USA, 1–3 July 2020; pp. 2351–2356. [Google Scholar]
- Gelb, A. Applied Optimal Estimation; M.I.T. Press: Cambridge, UK, 1978. [Google Scholar]
- Kalman, R. A New Approach to Linear Filtering and Prediction Problems. Trans. ASME–J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef] [Green Version]
- Alvarez, J.; Lopez, T. Robust dynamic state estimation of nonlinear plants. AIChE J. 1999, 45, 107–123. [Google Scholar] [CrossRef]
- Aris, R. Introduction to the Analysis of Chemical Reactors; Prentice-Hall: Englewood Cliffs, NJ, USA, 1969. [Google Scholar]
- Bastin, G.; Dochain, D. On-Line Estimation and Adaptive Control of Bioreactors; Elsevier: Amsterdam, The Netherlands, 1990. [Google Scholar]
- Dochain, D. State observers for tubular reactors with unknown kinetics. J. Proc. Control 2000, 45, 259–268. [Google Scholar] [CrossRef]
- Franco-de los Reyes, H.A.; Schaum, A.; Meurer, T.; Alvarez, J. Stabilization of an unstable tubular reactor by nonlinear passive output feedback control. J. Process Control 2020, 93, 83–96. [Google Scholar] [CrossRef]
- Varma, A.; Aris, R. Stirred pots and empty tubes. In Chemical Reactor Theory; Prentice Hall: Hoboken, NJ, USA, 1977; pp. 79–154. [Google Scholar]
- Winkin, J.J.; Dochain, D.; Ligarius, P. Dynamical analysis of distributed parameter tubular reactors. Automatica 2000, 36, 349–361. [Google Scholar] [CrossRef]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schaum, A. Autoencoder-Based Reduced Order Observer Design for a Class of Diffusion-Convection-Reaction Systems. Algorithms 2021, 14, 330. https://doi.org/10.3390/a14110330
Schaum A. Autoencoder-Based Reduced Order Observer Design for a Class of Diffusion-Convection-Reaction Systems. Algorithms. 2021; 14(11):330. https://doi.org/10.3390/a14110330
Chicago/Turabian StyleSchaum, Alexander. 2021. "Autoencoder-Based Reduced Order Observer Design for a Class of Diffusion-Convection-Reaction Systems" Algorithms 14, no. 11: 330. https://doi.org/10.3390/a14110330
APA StyleSchaum, A. (2021). Autoencoder-Based Reduced Order Observer Design for a Class of Diffusion-Convection-Reaction Systems. Algorithms, 14(11), 330. https://doi.org/10.3390/a14110330